Dense Image-Matching via Optical Flow Field Estimation and Fast-Guided Filter Refinement



Abstract
:
1. Introduction
- (1)
- A novel coarse-to-fine dense aerial image-matching strategy is proposed.
- (2)
- The B-spline approximation (BA) algorithm is improved into a triangulation-based multi-level B-spline approximation (TMBA) algorithm in order to avoid the estimated dense optical flow field over smooth.
- (3)
- A fast guided filter based refinement method is introduced to achieve a better matching completeness in poor texture and sharp depth discontinuity region.
2. Methodology
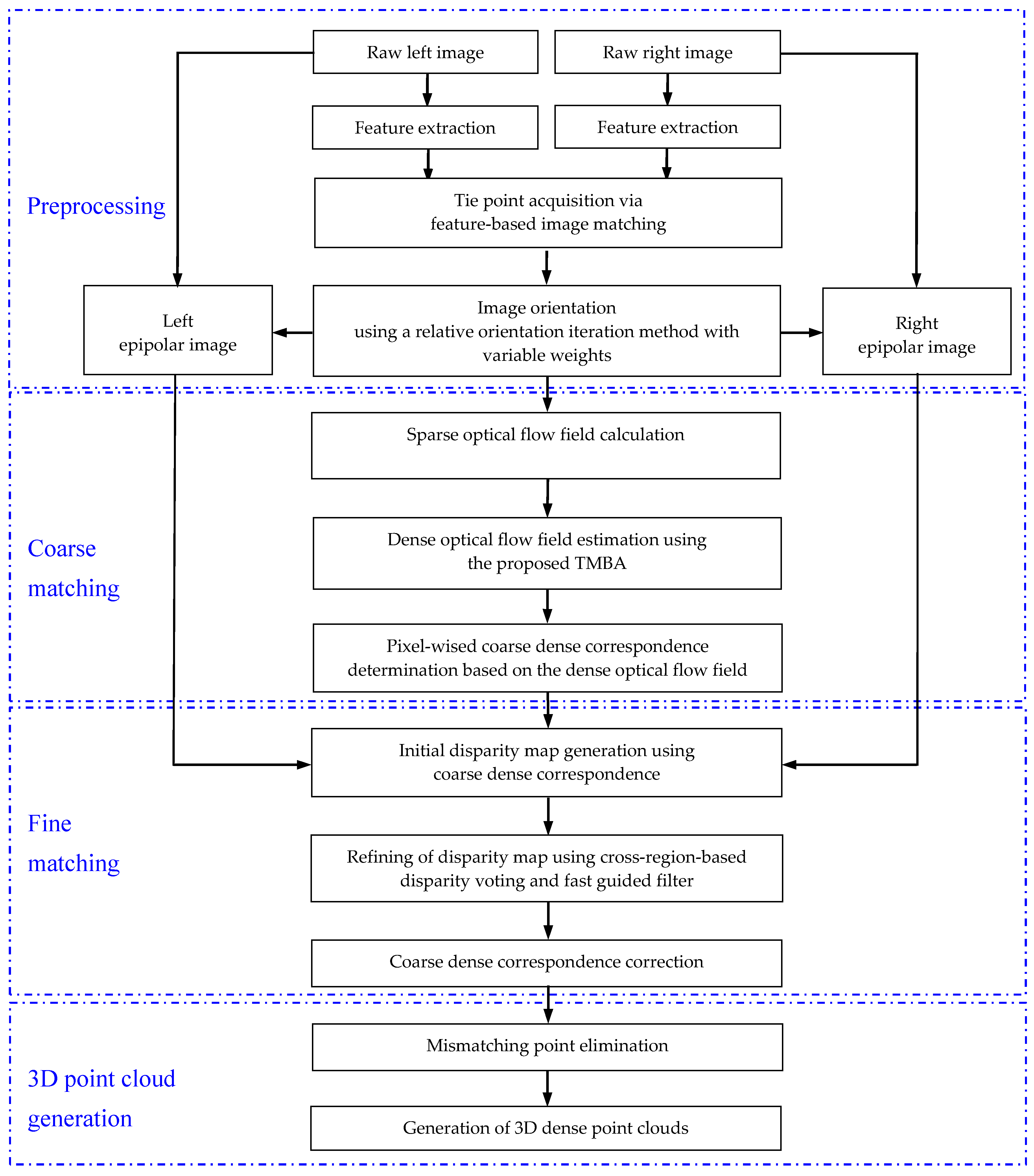
2.1. Complete Procedure
2.2. Optical Flow Field-Based Coarse-Matching Method
2.2.1. B-Spline Approximation (BA) for Dense Optical Flow-Field Estimation
2.2.2. Triangulation-Based B-Spline Approximation (TBA) Procedure
- (1)
- The BA method is used to calculate the control lattice from the discrete optical flow point set .
- (2)
- Delaunay triangulation is performed on the sparse optical flow points set in the image coordinate system, and a linear interpolation function is constructed within each triangle to calculate the optical flow using Equation (4).where , and are optical flow values corresponding to the three vertices of the triangle; are weighted parameters determined by the Euclidean distance between the selected points to the three vertices of the triangle, and .
- (3)
- Equation (3) is used to calculate the control lattice using obtained in step 2).
- (4)
- The points in control lattice that fall within a Delaunay triangular grid region are selected and their total number n is calculated.
- (5)
- The selected points are used to calculate the adjusted distance .
- (6)
- The adjusted control lattice is calculated by substituting for in Equation (3), here, is an experienced weighting value that is generally set to 0.5.
2.2.3. Triangulation-Based Multi-Level B-Spline Approximation (TMBA) Strategy for Dense Optical Flow Field Estimation
2.3. Refinement of Coarse-Matching Point Using Fast-Guided Filter
2.3.1. Cost Volume Calculation
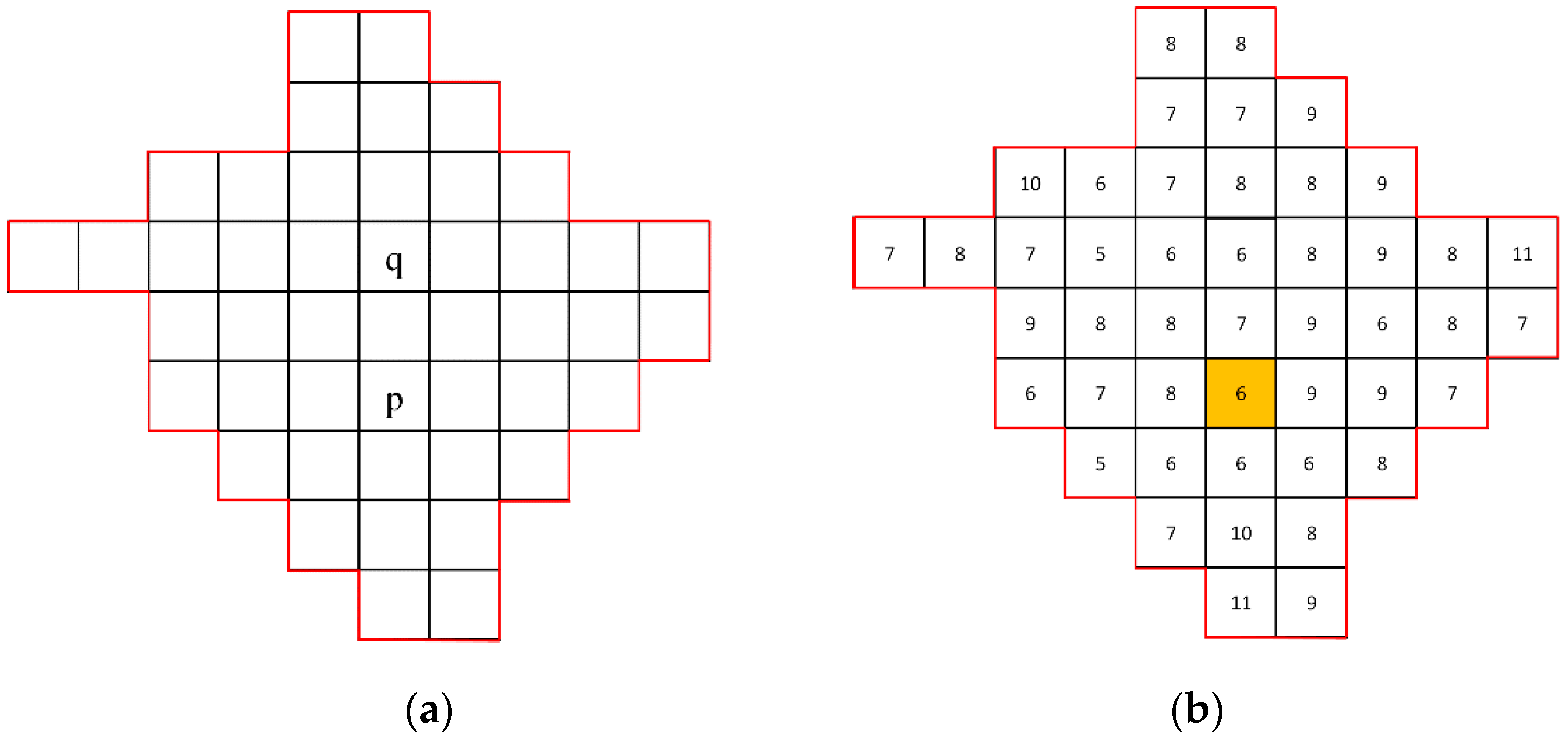
2.3.2. Cross Region-Based Disparity Range Voting
- (1)
- andwhere is the color difference factor between pixels p and q, defined as , and are predefined constants for avoiding a large color difference between p and q.
- (2)
- Lwhere is the euclidean distance between p and q in the coordinate system of the epipolar image. L is the predefined constant to limit the spatial distance between p and q.
2.3.3. Cost Aggregation Using Fast-Guided Filter
2.3.4. Refinement of Disparity Map and Coarse-Matching Points
3. Experimental Results
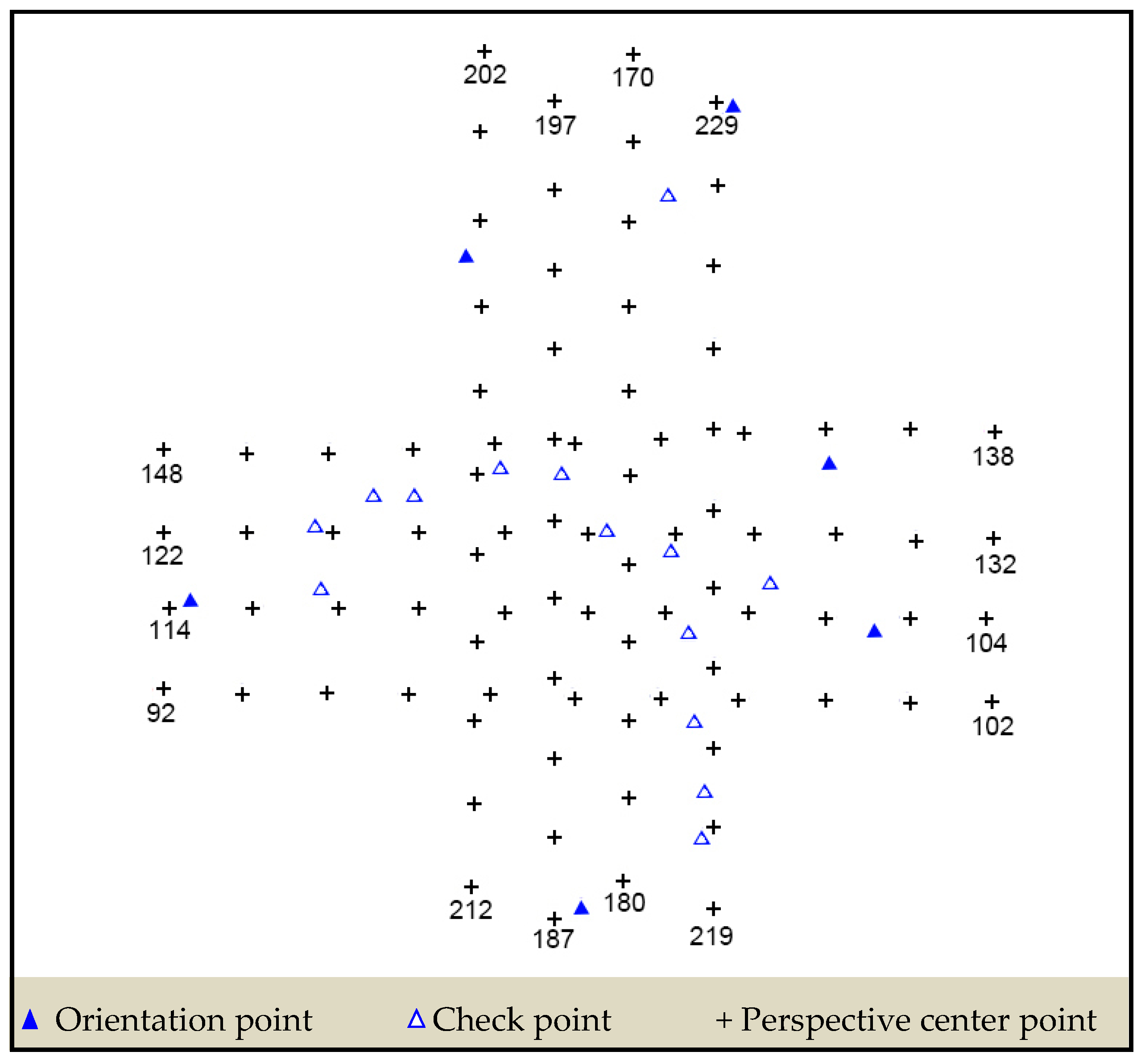
3.1. Experimental Design and Implementation
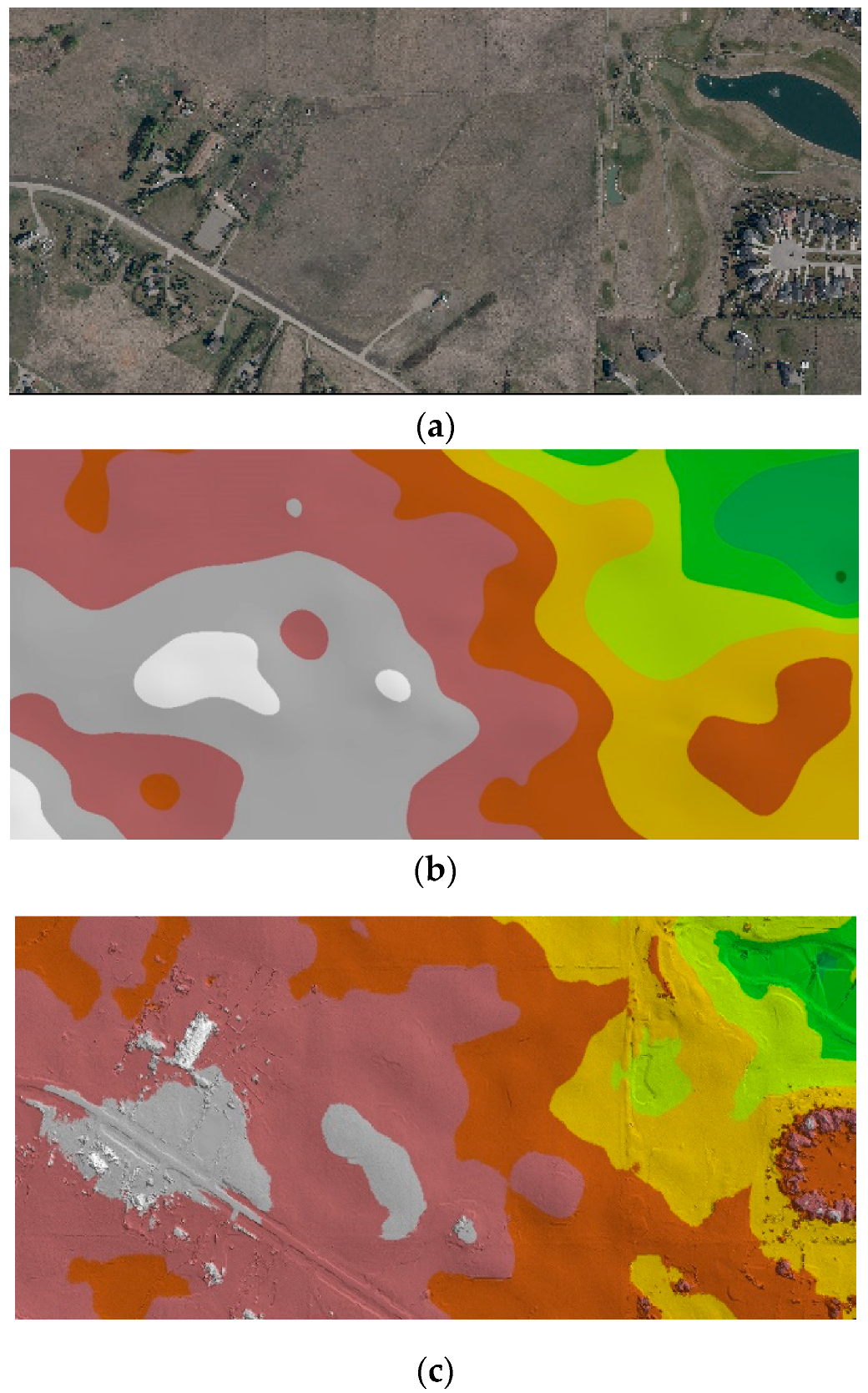
3.2. Experimental Results
4. Discussion
4.1. Assessment Criteria of Optical Flow Field-Based Dense Image-Matching (OFFDIM) Quality
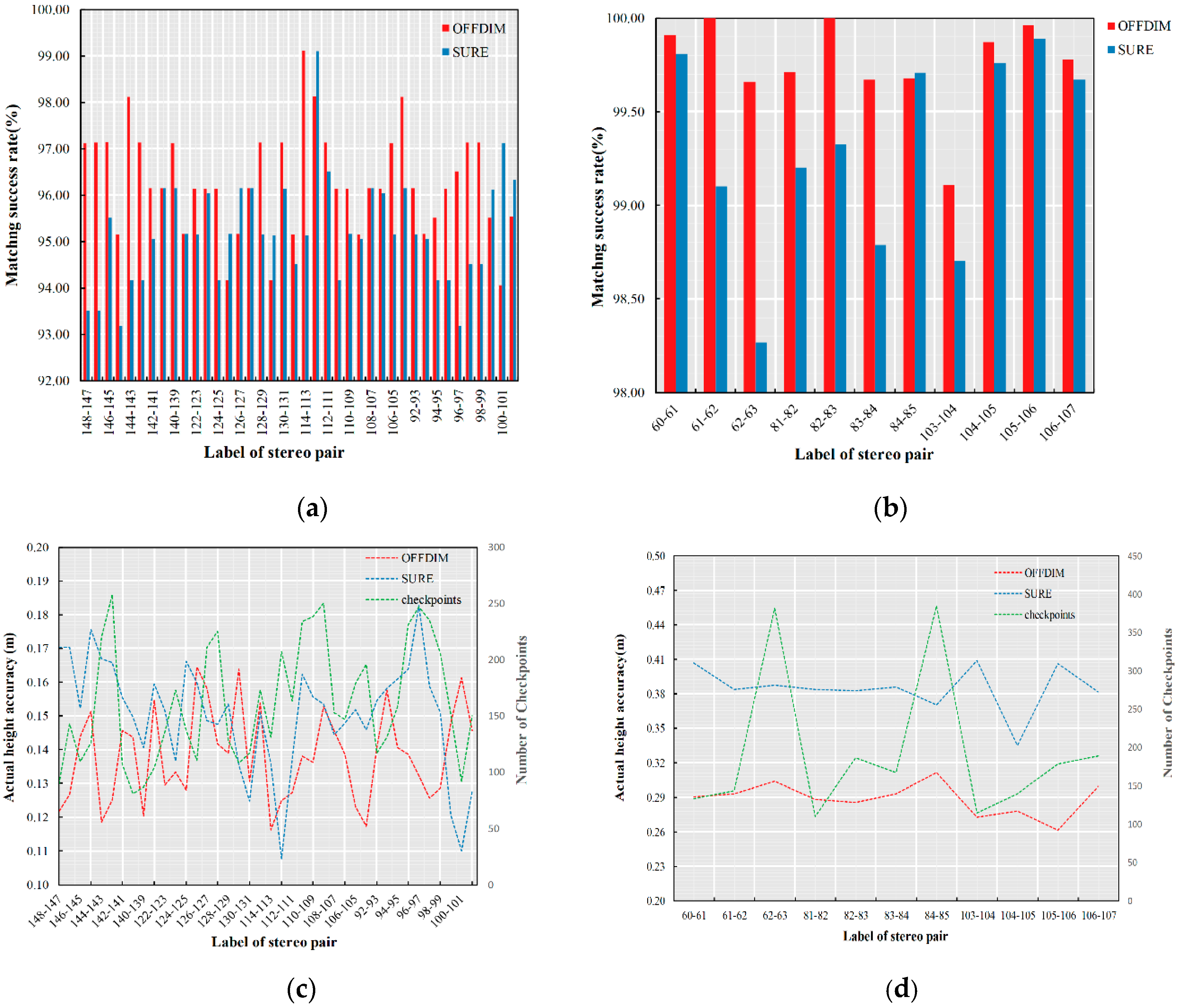
4.2. Comprehensive Comparison with SURE
4.3. Strengths and Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rothermel, M.; Haala, N. Potential of dense matching for the generation of high-quality digital elevation models. In Proceedings of the ISPRS Workshop High-Resolution Earth Imaging for Geospatial Information, Hannover, Germany, 14–17 June 2011. [Google Scholar]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high-density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Torresani, L.; Kolmogorov, V.; Rother, C. A dual decomposition approach to feature correspondence. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 259–271. [Google Scholar] [CrossRef] [PubMed]
- Scharstein, D.; Szeliski, R.; Zabih, R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. In Proceedings of the IEEE Workshop on Stereo and Multi-Baseline Vision (SMBV), Kauai, HI, USA, 9–10 December 2001. [Google Scholar]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Hosni, A.; Bleyer, M.; Gelautz, M. Secrets of adaptive support weight techniques for local stereo matching. Comput. Vis. Image Understand. 2013, 117, 620–632. [Google Scholar] [CrossRef]
- Zeglazi, O.; Rziza, M.; Amine, A.; Demonceaux, C. A hierarchical stereo matching algorithm based on adaptive support region aggregation method. Pattern Recognit. Lett. 2018, 112, 205–211. [Google Scholar] [CrossRef]
- Wang, J.; Zickler, T. Local detection of stereo occlusion boundaries. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Tran, S.; Davis, L. 3D surface reconstruction using graph cuts with surface constraints. In Proceedings of the European Conference on Computer Vision (ECCV), Graz, Austria, 7–13 May 2006. [Google Scholar]
- Issac, H.; Boykov, Y. Energy-based multi-model fitting and matching for 3D reconstruction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 24–27 June 2014. [Google Scholar]
- Kim, K.R.; Kim, C.S. Adaptive smoothness constraints for efficient stereo matching using texture and edge information. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016. [Google Scholar]
- Barron, J.T.; Adams, A.; Shih, Y.C.; Hernández, C. Fast bilateral-space stereo for synthetic defocus. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Yan, T.; Gan, Y.; Xia, Z.; Zao, Q. Segment-based disparity refinement with occlusion handling for stereo matching. IEEE Trans. Image Proc. 2019, 28, 3885–3897. [Google Scholar] [CrossRef] [PubMed]
- Tola, E.; Lepetit, V.; Fua, P. A fast local descriptor for dense matching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, AK, USA, 24–26 June 2008. [Google Scholar]
- Hirschmüller, H.; Scharstein, D. Evaluation of stereo matching costs on images with radiometric differences. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 1582–1599. [Google Scholar] [CrossRef] [PubMed]
- Hirschmüller, H. Stereo processing by semi-global matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Remondino, F.; El-Hakim, S.; Gruen, A.; Zhang, L. Turning images into 3D models. IEEE Signal. Process. Mag. 2008, 25, 55–65. [Google Scholar] [CrossRef]
- Rothermel, M.; Wenzel, K.; Fritsch, D.; Haala, N. SURE: Photogrammetric surface reconstruction from imagery. In Proceedings of the LC3D Workshop, Berlin, Germany, 4–5 December 2012. [Google Scholar]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A comparison and evaluation of multi-view stereo reconstruction algorithms. In Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR), New York, NY, USA, 17–22 June 2006. [Google Scholar]
- Seitz, S.M.; Dyer, C.R. Photorealistic scene reconstruction by voxel coloring. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Juan, Puerto Rico, 17–19 June 1997. [Google Scholar]
- Sinha, S.N.; Mordohai, P.; Pollefeys, M. Multi-view stereo via graph cuts on the dual of an adaptive tetrahedral mesh. In Proceedings of the 11th IEEE International Conference on Computer Vision (ICCV), Rio de Janeiro, Brazil, 14–20 October 2007. [Google Scholar]
- Yoon, K.J.; Kweon, I.S. Adaptive support-weight approach for correspondence search. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 650–656. [Google Scholar] [CrossRef] [PubMed]
- Bradley, D.; Boubekeur, T.; Heidrich, W. Accurate multi-view reconstruction using robust binocular stereo and surface meshing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2008), Anchorage, AK, USA, 24–26 June 2008. [Google Scholar]
- Geiger, A.; Roser, M.; Urtasun, R. Efficient large-scale stereo matching. In Proceedings of the Asian Conference on Computer Vision, Queenstown, New Zealand, 8–12 November 2010. [Google Scholar]
- Habbecke, M.; Kobbelt, L. Iterative multi-view plane fitting. In Proceedings of the 11th Fall Workshop Vision, Modelling, and Visualization, Aachen, Germany, 22–24 November 2006. [Google Scholar]
- Shan, Q.; Curless, B.; Furukawa, Y.; Hernandez, C.; Seitz, S.M. Occluding contours for multi-view stereo. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 24–27 June 2014. [Google Scholar]
- Schönberger, J.L.; Zheng, E.; Frahm, J.M. Pixelwise view selection for unstructured multi-view stereo. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016. [Google Scholar]
- Furukawa, Y.; Ponce, J. Accurate, dense, and robust multi-view stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1362–1376. [Google Scholar] [CrossRef]
- Ai, M.; Hu, Q.; Li, J. A robust photogrammetric processing method of low-altitude UAV images. Remote Sens. 2015, 7, 2302–2333. [Google Scholar] [CrossRef]
- Shao, Z.F.; Yang, N.; Xiao, X.; Zhang, L.; Peng, Z. A multi-view dense point cloud generation algorithm based on low-altitude remote sensing images. Remote Sens. 2016, 8, 381. [Google Scholar] [CrossRef]
- Baltsavias, E.P. Digital ortho-images—A powerful tool for the extraction of spatial-and geo-information. ISPRS J. Photogramm. Remote Sens. 1996, 51, 63–77. [Google Scholar] [CrossRef]
- Lowe, G. SIFT-the scale invariant feature transform. Int. J. 2004, 2, 91–110. [Google Scholar]
- Wang, Z.Z. Principles of Photogrammetry (with Remote Sensing); Publishing House of Surveying and Mapping: Beijing, China, 1990. [Google Scholar]
- Bouguet, J.Y. Pyramidal implementation of the affine Lucas Kanade feature tracker description of the algorithm. Intel Corp. 2001, 5, 4. [Google Scholar]
- Zabih, R.; Woodfill, J. Non-parametric local transforms for computing visual correspondence. In Proceedings of the European Conference on Computer Vision, Stockholm, Sweden, 2–6 May 1994. [Google Scholar]
- Lee, S.; Wolberg, G.; Shin, S. Scattered data interpolation with multilevel B-splines. IEEE Trans. Visual. Comput. Graph. 1997, 3, 229–244. [Google Scholar] [CrossRef]
- Roy, S. Stereo without epipolar lines: A maximum-flow formulation. Int. J. Comput. Vis. 1999, 24, 147–161. [Google Scholar] [CrossRef]
- Kanade, T.; Okutomi, M. A stereo matching algorithm with an adaptive window: Theory and experiment. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington DC, USA, 10–17 May 2002. [Google Scholar]
- Min, D.B.; Lu, J.B.; Do, M.N. Joint histogram-based cost aggregation for stereo matching. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2539–2545. [Google Scholar] [PubMed]
- He, K.; Sun, J. Fast guided filter. arXiv 2015, arXiv:1505.00996. [Google Scholar]
- Yuan, X.X. A novel method of systematic error compensation for a position and orientation system. Prog. Nat. Sci. 2008, 18, 953–963. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: Berlin, Germany, 2010. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Beijing | Vahingen |
|---|---|---|
| Aerial craft | Unmanned Aerial Vehicle (UAV) | Aircraft |
| Camera | PhaseOne IXU-1000 | Intergraph/ZI DMC |
| Principal distance (mm) | 51.21293 | 120.00000 |
| Format (pixels) | 11,608 × 8708 | 7680 × 13,824 |
| Pixel size (µm) | 4.6 | 12.0 |
| Ground sample distance (GSD) (cm) | 7 | 9 |
| Relative flying height (m) | 779 | 900 |
| Longitudinal overlap (%) | 60 | 60 |
| Lateral overlap (%) | 30 | 60 |
| Number of mapping strips | 4 | 3 |
| Number of control strips | 4 | 1 |
| Number of images | 88 | 20 |
| Number of ground control points | 18 | 0 |
| Number of pass points | 55,701 | 7151 |
| Block area (km2) | 2.8 × 2.8 | 2.1 × 1.8 |
| Maximum topographic relief (m) | 54 | 170 |
| Average terrestrial height (m) | 508 | 285 |
| Dataset | Number of Images | Matching Method | Runtime (s/model) | Overall Matching Success Rate (%) | Number of Checkpoints | μ (m) |
|---|---|---|---|---|---|---|
| Beijing | 44 | OFFDIM | 154.5 | 94.0 | 3077 | 0.1378 |
| SURE | 402.0 | 93.2 | 3077 | 0.1507 | ||
| Vahingen | 14 | OFFDIM | 218.2 | 99.1 | 1529 | 0.2841 |
| SURE | 327.3 | 98.3 | 1529 | 0.3849 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, W.; Yuan, X.; Xu, S.; Gong, J.; Shibasaki, R. Dense Image-Matching via Optical Flow Field Estimation and Fast-Guided Filter Refinement. Remote Sens. 2019, 11, 2410. https://doi.org/10.3390/rs11202410
Yuan W, Yuan X, Xu S, Gong J, Shibasaki R. Dense Image-Matching via Optical Flow Field Estimation and Fast-Guided Filter Refinement. Remote Sensing. 2019; 11(20):2410. https://doi.org/10.3390/rs11202410
Chicago/Turabian StyleYuan, Wei, Xiuxiao Yuan, Shu Xu, Jianya Gong, and Ryosuke Shibasaki. 2019. "Dense Image-Matching via Optical Flow Field Estimation and Fast-Guided Filter Refinement" Remote Sensing 11, no. 20: 2410. https://doi.org/10.3390/rs11202410
APA StyleYuan, W., Yuan, X., Xu, S., Gong, J., & Shibasaki, R. (2019). Dense Image-Matching via Optical Flow Field Estimation and Fast-Guided Filter Refinement. Remote Sensing, 11(20), 2410. https://doi.org/10.3390/rs11202410