Rapid Flood Progress Monitoring in Cropland with NASA SMAP


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Description
2.3. Methodology
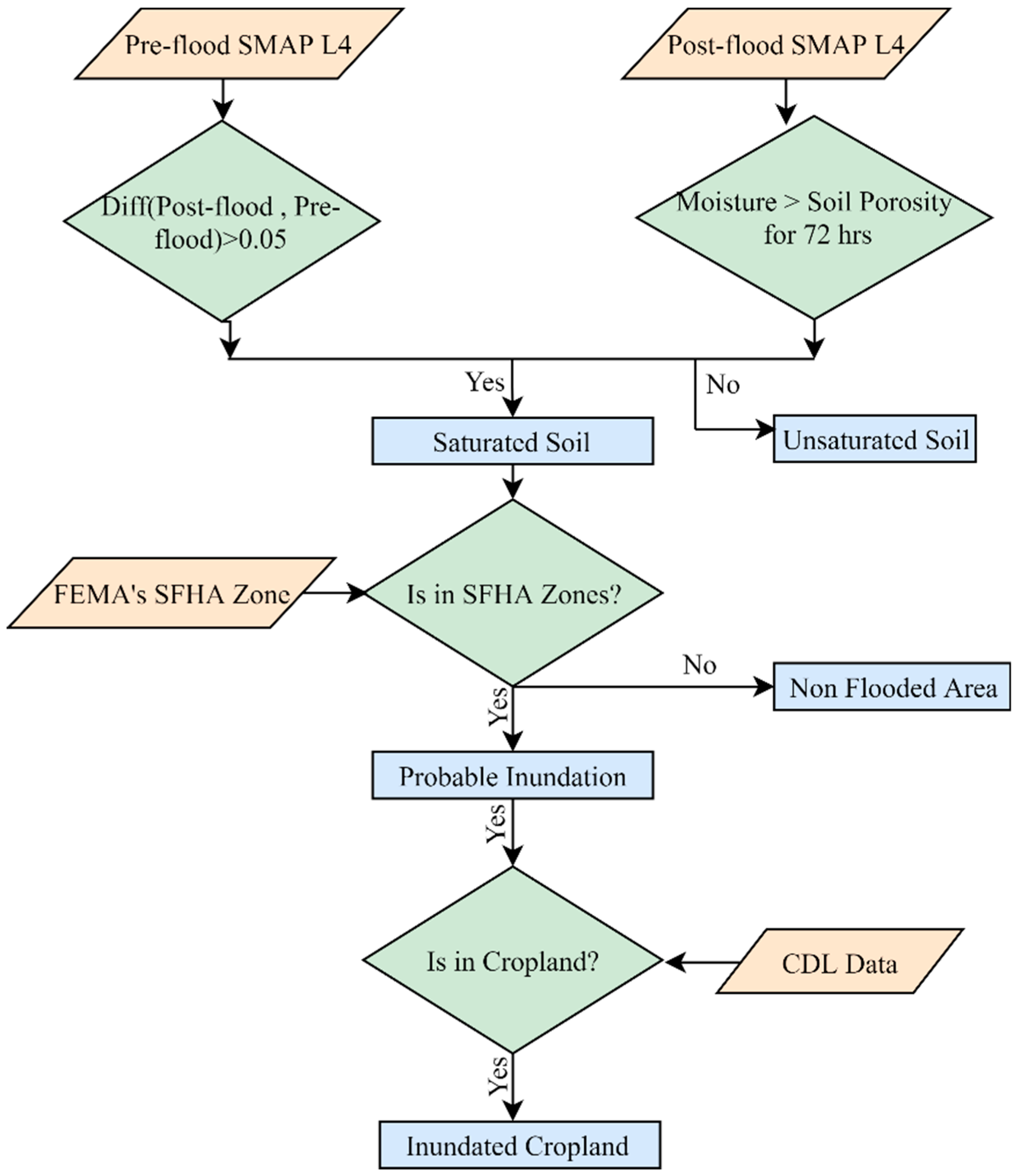
2.3.1. Flood Mapping from SMAP Surface Soil Moisture
2.3.2. Preparation of Reference Flood Map from Sentinel-1 Data
3. Results
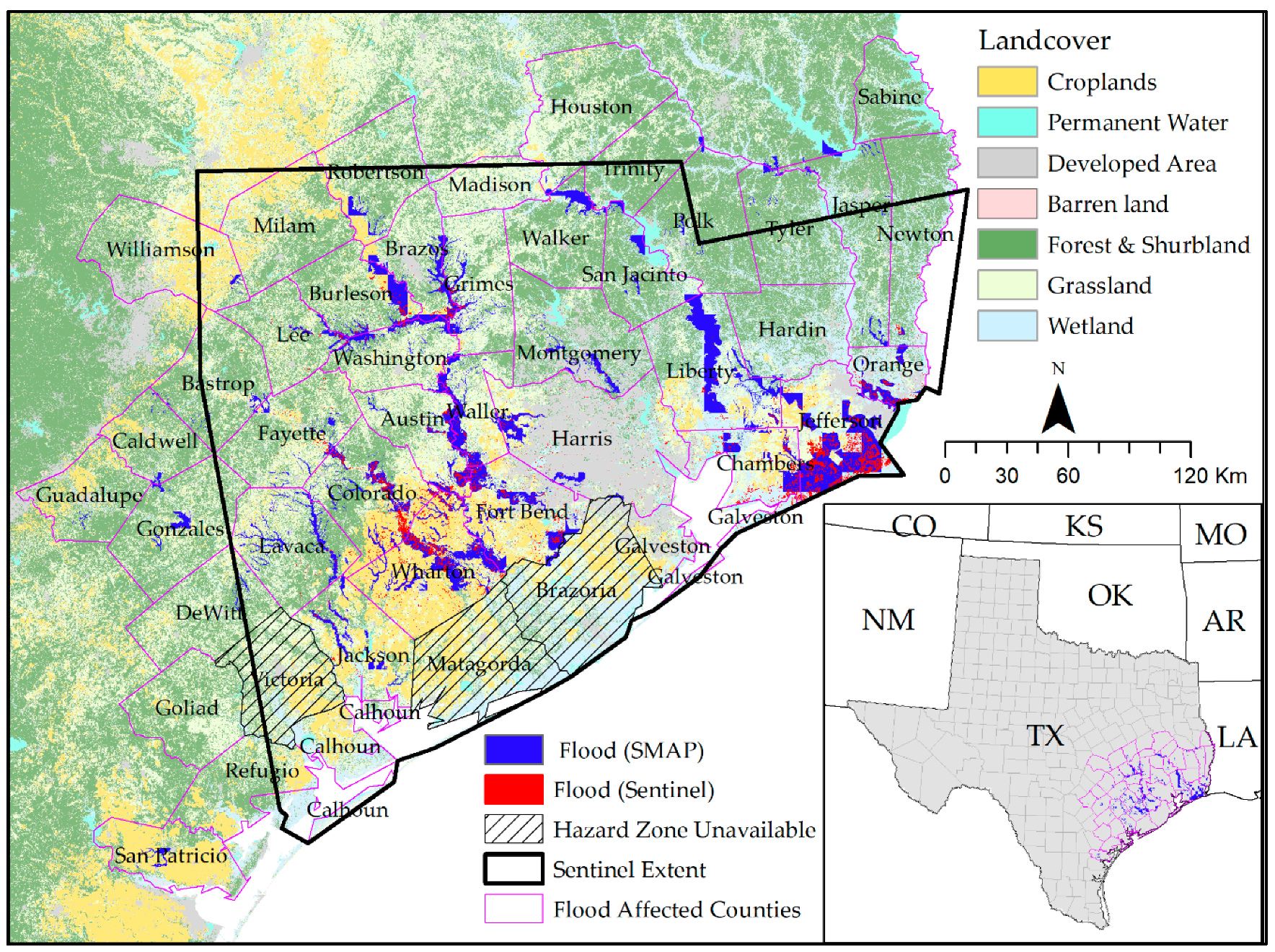
3.1. Hurricane Harvey Induced Houston Flood in Texas, August 2017
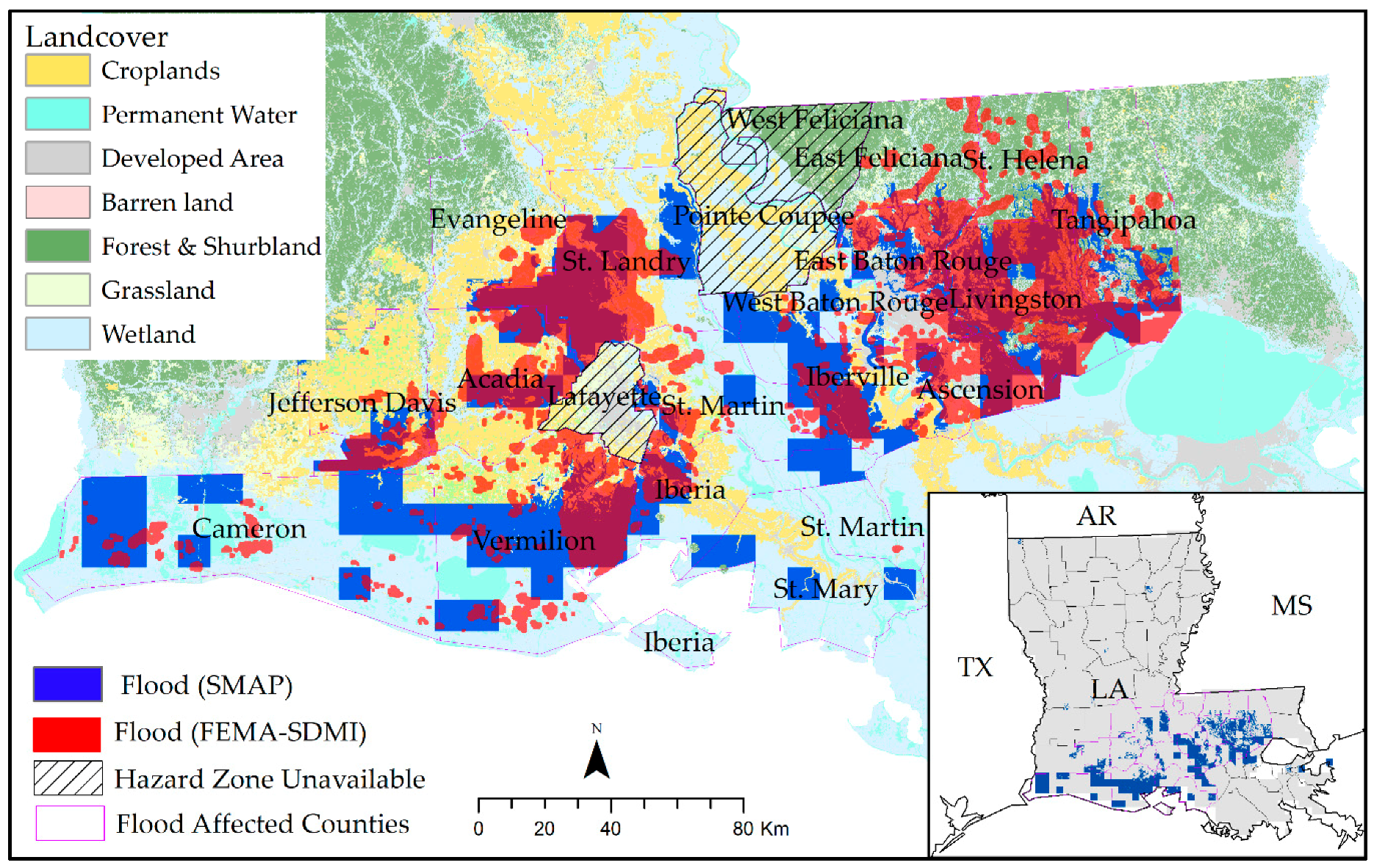
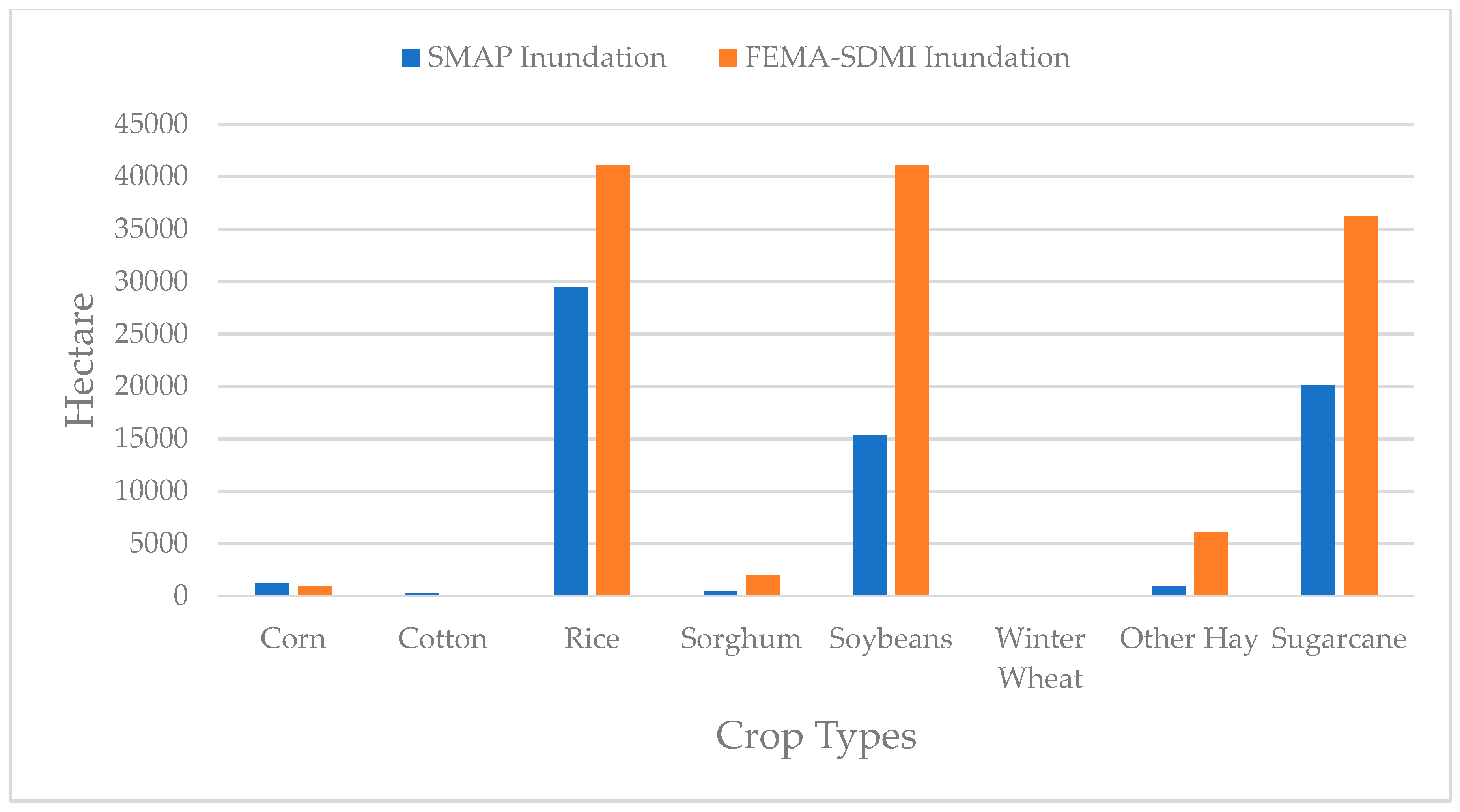
3.2. Baton Rouge Flood in Louisiana, August 2016
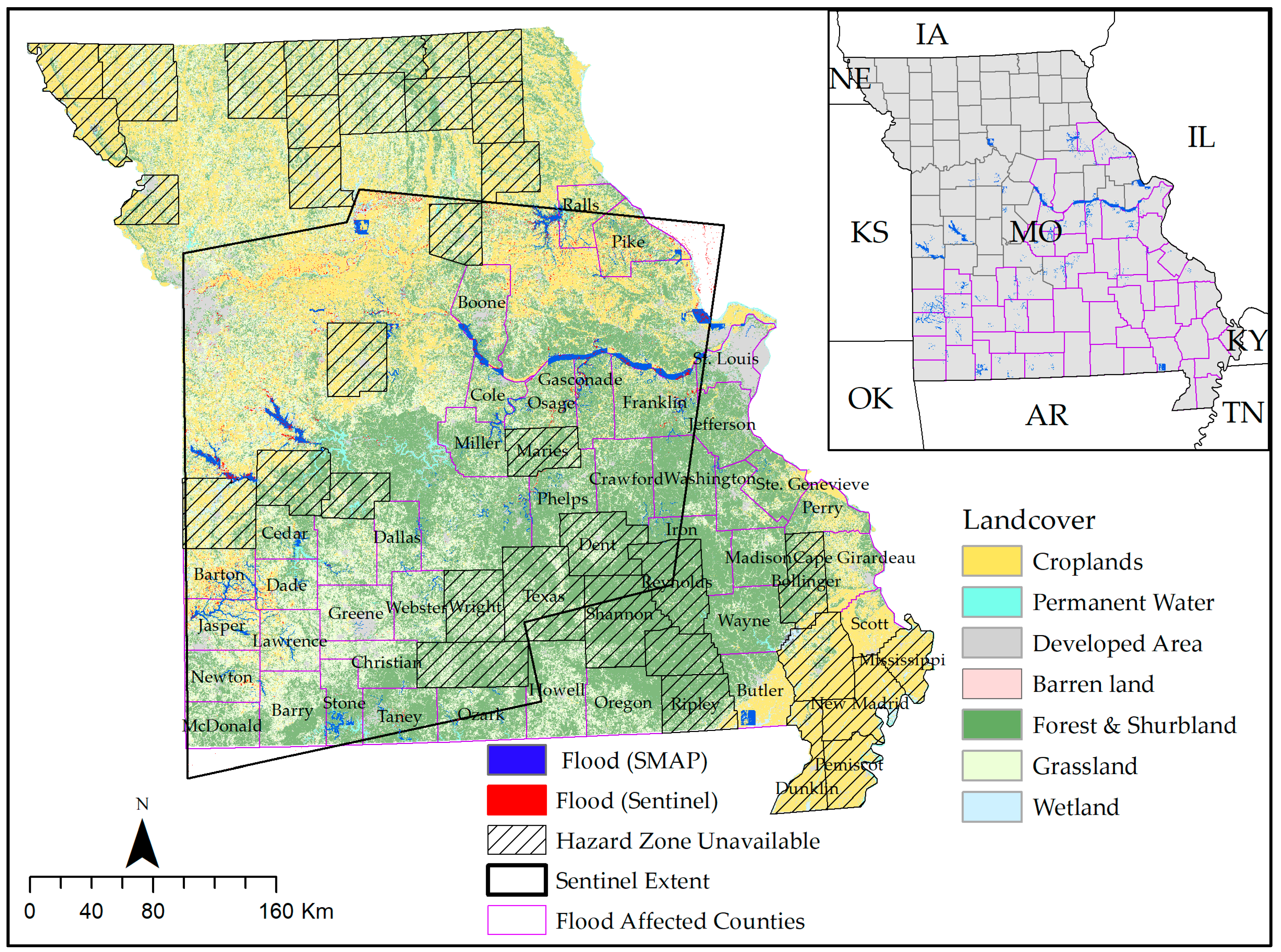
3.3. Missouri Flood May 2017
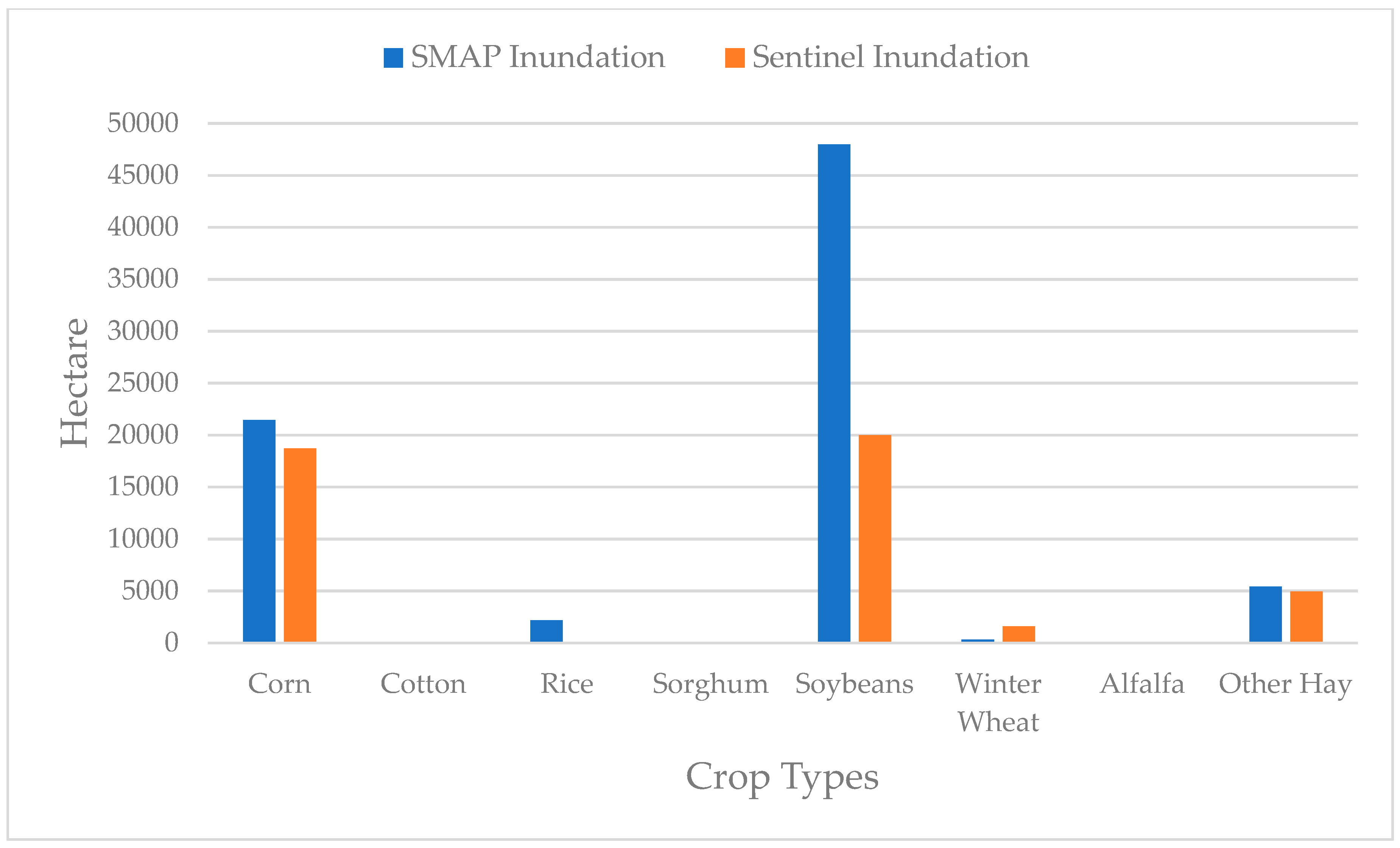
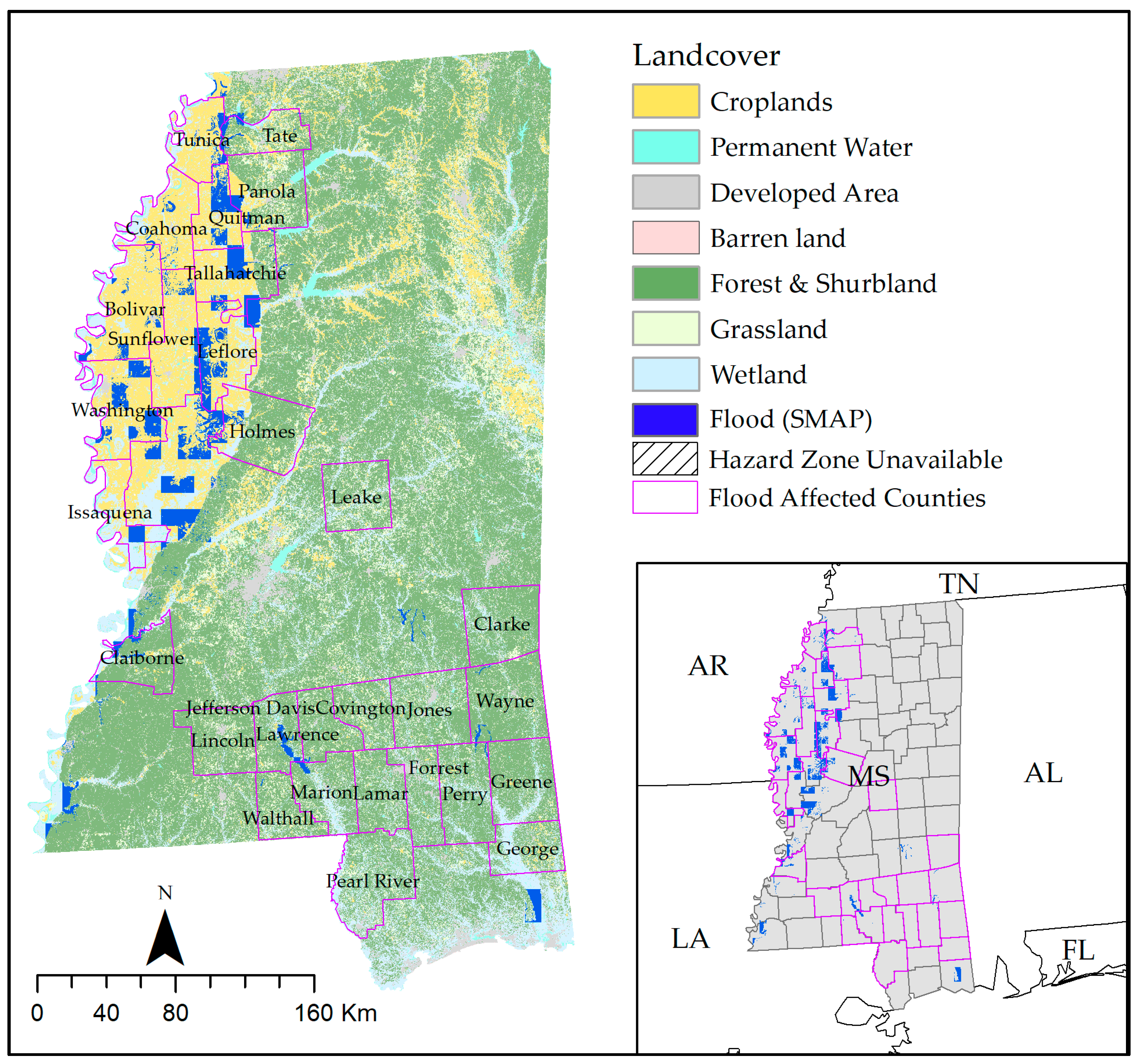
3.4. Mississippi Severe Storms and Flooding March 2016
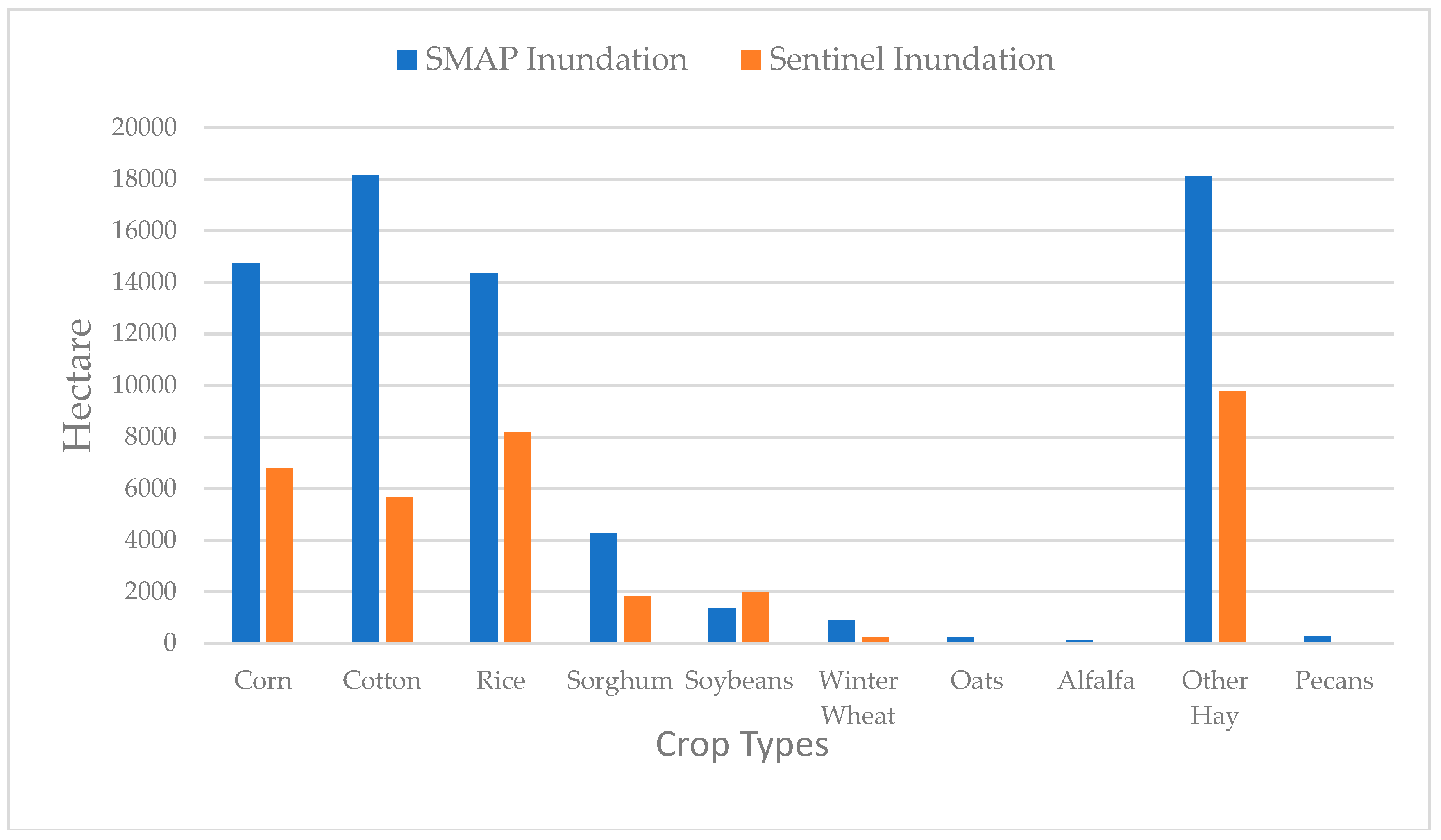
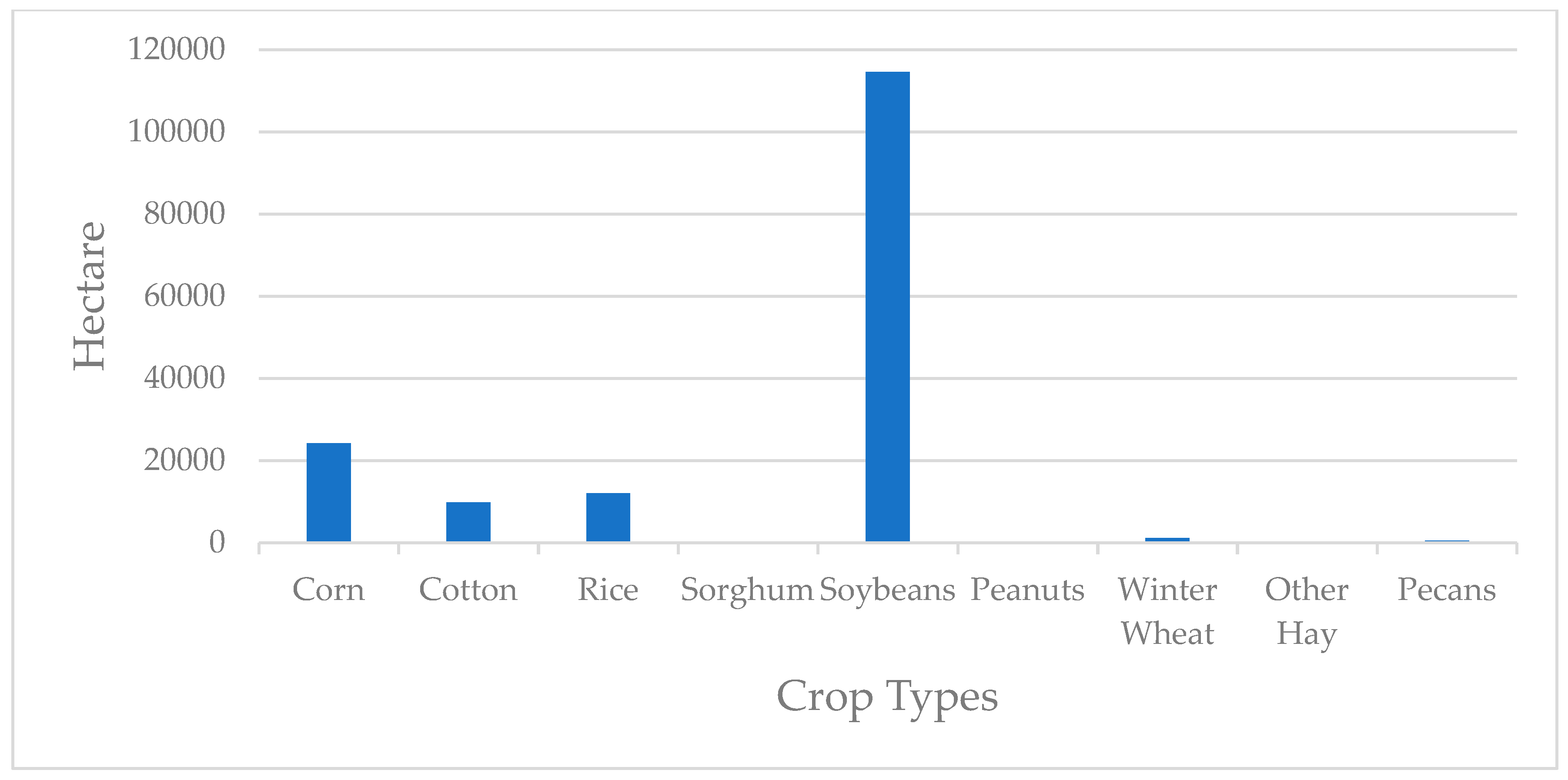
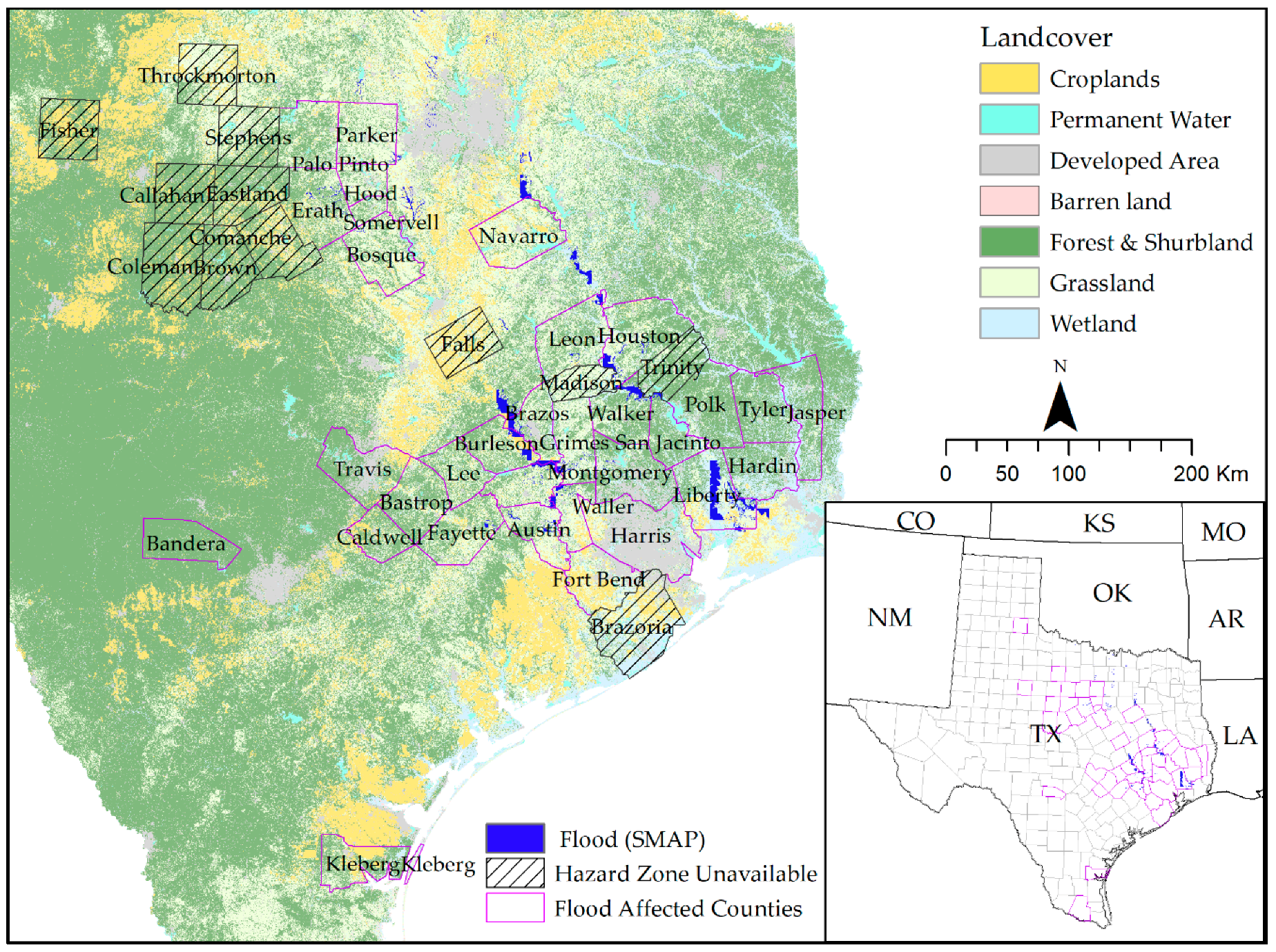
3.5. Texas Flood May 2016
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Doocy, S.; Daniels, A.; Murray, S.; Kirsch, T.D. The human impact of floods: A historical review of events 1980–2009 and systematic literature review. PLoS Curr. 2013, 5. [Google Scholar] [CrossRef]
- Jonkman, S.N. Global perspectives on loss of human life caused by floods. Nat. Hazards 2005, 34, 151–175. [Google Scholar] [CrossRef]
- Plate, E.J. Flood risk and flood management. J. Hydrol. 2002, 267, 2–11. [Google Scholar] [CrossRef]
- Jonkman, S.N.; Vrijling, J.K. Loss of life due to floods. J. Flood Risk Manag. 2008, 1, 43–56. [Google Scholar] [CrossRef]
- FEMA Flooding: America’s #1 Natural Hazard. Available online: https://www.fema.gov/news-release/2004/08/16/flooding-americas-1-natural-hazard (accessed on 25 March 2018).
- Milly, P.C.D.; Wetherald, R.T.; Dunne, K.A.; Delworth, T.L. Increasing risk of great floods in a changing climate. Nature 2002, 415, 514–517. [Google Scholar] [CrossRef]
- Hirabayashi, Y.; Mahendran, R.; Koirala, S.; Konoshima, L.; Yamazaki, D.; Watanabe, S.; Kim, H.; Kanae, S. Global flood risk under climate change. Nat. Clim. Chang. 2013, 3, 816–821. [Google Scholar] [CrossRef]
- Gleick, P.H. Introduction: Studies from the water sector of the national assessment. JAWRA J. Am. Water Resour. Assoc. 1999, 35, 1297–1300. [Google Scholar] [CrossRef]
- Al-Sabhan, W.; Mulligan, M.; Blackburn, G.A. A real-time hydrological model for flood prediction using GIS and the WWW. Comput. Environ. Urban Syst. 2003, 27, 9–32. [Google Scholar] [CrossRef]
- Rosenzweig, C.; Tubiello, F.N.; Goldberg, R.; Mills, E.; Bloomfield, J. Increased crop damage in the US from excess precipitation under climate change. Glob. Environ. Chang. 2002, 12, 197–202. [Google Scholar] [CrossRef]
- Smith, A.B.; Katz, R.W. US billion-dollar weather and climate disasters: Data sources, trends, accuracy and biases. Nat. Hazards 2013, 67, 387–410. [Google Scholar] [CrossRef]
- Downton, M.W.; Miller, J.Z.B.; Pielke Jr, R.A. Reanalysis of US National Weather Service flood loss database. Nat. Hazards Rev. 2005, 6, 13–22. [Google Scholar] [CrossRef]
- Pike, D. The Financial Costs and Consequences of the Escalating Global Warming Emergency. Available online: http://www.joboneforhumanity.org/the_financial_costs_and_consequences_of_the_escalating_global_warming_emergency (accessed on 12 April 2018).
- Quealy, K. The cost of Hurricane Harvey: Only one recent storm comes close. The New York Times, 1 September 2017. [Google Scholar]
- NOAA National Centers for Environmental Information (NCEI). Billion-Dollar Weather and Climate Disasters; NCEI: Asheville, NC, USA, 2018.
- DeHaan, H.; Stamper, J.; Walters, B. Mississippi River and Tributaries System 2011 Post-Flood Report; US Army Corps of Engineers Mississippi Valley Division: Vicksburg, MS, USA, 2012.
- Sanyal, J.; Lu, X.X. Application of Remote Sensing in Flood Management with Special Reference to Monsoon Asia: A Review. Nat. Hazards 2004, 33, 283–301. [Google Scholar] [CrossRef]
- Rahman, M.S.; Di, L. The state of the art of spaceborne remote sensing in flood management. Nat. Hazards 2017, 85, 1223–1248. [Google Scholar] [CrossRef]
- Lin, L.; Di, L.; Yu, E.G.; Kang, L.; Shrestha, R.; Rahman, M.S.; Tang, J.; Deng, M.; Sun, Z.; Zhang, C. A review of remote sensing in flood assessment. In Proceedings of the 2016 Fifth International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Tianjin, China, 18–20 July 2016; pp. 1–4. [Google Scholar]
- Grimaldi, S.; Li, Y.; Pauwels, V.R.; Walker, J.P. Remote sensing-derived water extent and level to constrain hydraulic flood forecasting models: Opportunities and challenges. Surv. Geophys. 2016, 37, 977–1034. [Google Scholar] [CrossRef]
- Di, L.; Eugene, G.Y.; Kang, L.; Shrestha, R.; BAI, Y. RF-CLASS: A remote-sensing-based flood crop loss assessment cyber-service system for supporting crop statistics and insurance decision-making. J. Integr. Agric. 2017, 16, 408–423. [Google Scholar] [CrossRef]
- Rahman, M.; Di, L.; Yu, E.; Zhang, C.; Mohiuddin, H. In-Season Major Crop-Type Identification for US Cropland from Landsat Images Using Crop-Rotation Pattern and Progressive Data Classification. Agriculture 2019, 9, 17. [Google Scholar] [CrossRef]
- Shrestha, R.; Di, L.; Eugene, G.Y.; Kang, L.; Li, L.; Rahman, M.S.; Deng, M.; Yang, Z. Regression based corn yield assessment using MODIS based daily NDVI in Iowa state. In Proceedings of the 2016 Fifth International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Tianjin, China, 18–20 July 2016; pp. 1–5. [Google Scholar]
- O’Neill, P.; Entekhabi, D.; Njoku, E.; Kellogg, K. The NASA soil moisture active passive (SMAP) mission: OVERVIEW. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 3236–3239. [Google Scholar]
- Entekhabi, D.; Njoku, E.; O’Neill, P. The Soil Moisture Active and Passive Mission (SMAP): Science and applications. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–3. [Google Scholar]
- Fournier, S.; Reager, J.T.; Lee, T.; Vazquez-Cuervo, J.; David, C.H.; Gierach, M.M. SMAP observes flooding from land to sea: The Texas event of 2015. Geophys. Res. Lett. 2016, 43. [Google Scholar] [CrossRef]
- Rahman, M.S.; Di, L.; Shrestha, R.; Yu, E.G.; Lin, L.; Zhang, C.; Hu, L.; Tang, J.; Yang, Z.; Zhengwei, D.C. Agriculture Flood Mapping with Soil Moisture Active Passive (SMAP) Data: A Case of 2016 Louisiana Flood. In Proceedings of the 6th International Conference on Agro-Geoinformatics 2017, Fairfax, VA, USA, 7–10 August 2017. [Google Scholar]
- Slatyer, R.O. Plant-Water Relationships; Academic Press: New York, NY, USA; San Francisco, CA, USA; London, UK, 1967. [Google Scholar]
- Denmead, O.T.; Shaw, R.H. Availability of Soil Water to Plants as Affected by Soil Moisture Content and Meteorological Conditions 1. Agron. J. 1962, 54, 385–390. [Google Scholar] [CrossRef]
- Plant and Soil Sciences eLibrary. Available online: http://croptechnology.unl.edu/pages/informationmodule.php?idinformationmodule=1130447123&topicorder=2&maxto=13&minto=1 (accessed on 17 April 2018).
- Tapia-Silva, F.-O.; Itzerott, S.; Foerster, S.; Kuhlmann, B.; Kreibich, H. Estimation of flood losses to agricultural crops using remote sensing. Phys. Chem. Earth Parts A/B/C 2011, 36, 253–265. [Google Scholar] [CrossRef]
- Horn, R.; Taubner, H.; Wuttke, M.; Baumgartl, T. Soil physical properties related to soil structure. Soil Tillage Res. 1994, 30, 187–216. [Google Scholar] [CrossRef]
- Godwin, R.J. A review of the effect of implement geometry on soil failure and implement forces. Soil Tillage Res. 2007, 97, 331–340. [Google Scholar] [CrossRef]
- Saxton, K.E.; Rawls, W.J. Soil water characteristic estimates by texture and organic matter for hydrologic solutions. Soil Sci. Soc. Am. J. 2006, 70, 1569–1578. [Google Scholar] [CrossRef]
- Barker, D.; Beuerlein, J.; Dorrance, A.; Eckert, D.; Eisley, B.; Hammond, R.; Lentz, E.; Lipps, P.; Loux, M.; Mullen, R. Ohio Agronomy Guide, 14th ed.; Ohio State University Extension: Columbus, OH, USA, 2005; Volume 472. [Google Scholar]
- Hudson, B.D. Soil organic matter and available water capacity. J. Soil Water Conserv. 1994, 49, 189–194. [Google Scholar]
- Christiansen, J.E. Effect of entrapped air upon the permeability of soils. Soil Sci. 1944, 58, 355–366. [Google Scholar] [CrossRef]
- Disasters|FEMA.gov. Available online: https://www.fema.gov/disasters (accessed on 18 April 2018).
- Das, N.N.; Entekhabi, D.; Njoku, E.G.; Shi, J.J.; Johnson, J.T.; Colliander, A. Tests of the SMAP combined radar and radiometer algorithm using airborne field campaign observations and simulated data. IEEE Trans. Geosci. Remote. Sens. 2014, 52, 2018–2028. [Google Scholar] [CrossRef]
- Chan, S.K.; Bindlish, R.; O’Neill, P.E.; Njoku, E.; Jackson, T.; Colliander, A.; Chen, F.; Burgin, M.; Dunbar, S.; Piepmeier, J. Assessment of the SMAP passive soil moisture product. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 4994–5007. [Google Scholar] [CrossRef]
- Njoku, E.G.; Entekhabi, D. Passive microwave remote sensing of soil moisture. J. Hydrol. 1996, 184, 101–129. [Google Scholar] [CrossRef]
- Reichle, R.H.; De Lannoy, G.J.; Liu, Q.; Koster, R.D.; Kimball, J.S.; Crow, W.T.; Ardizzone, J.V.; Chakraborty, P.; Collins, D.W.; Conaty, A.L. Global Assessment of the SMAP Level-4 Surface and Root-Zone Soil Moisture Product Using Assimilation Diagnostics. J. Hydrometeorol. 2017, 18, 3217–3237. [Google Scholar] [CrossRef] [PubMed]
- Koster, R.D.; Suarez, M.J.; Ducharne, A.; Stieglitz, M.; Kumar, P. A catchment-based approach to modeling land surface processes in a general circulation model: 1. Model structure. J. Geophys. Res. Atmos. 2000, 105, 24809–24822. [Google Scholar] [CrossRef]
- Reichle, R.H.; De Lannoy, G.J.; Liu, Q.; Ardizzone, J.V.; Colliander, A.; Conaty, A.; Crow, W.; Jackson, T.J.; Jones, L.A.; Kimball, J.S. Assessment of the SMAP Level-4 surface and root-zone soil moisture product using in situ measurements. J. Hydrometeorol. 2017, 18, 2621–2645. [Google Scholar] [CrossRef]
- Lievens, H.; Reichle, R.H.; Liu, Q.; De Lannoy, G.J.M.; Dunbar, R.S.; Kim, S.B.; Das, N.N.; Cosh, M.; Walker, J.P.; Wagner, W. Joint Sentinel-1 and SMAP data assimilation to improve soil moisture estimates. Geophys. Res. Lett. 2017, 44, 6145–6153. [Google Scholar] [CrossRef] [PubMed]
- Kolassa, J.; Reichle, R.H.; Liu, Q.; Cosh, M.; Bosch, D.D.; Caldwell, T.G.; Colliander, A.; Holifield Collins, C.; Jackson, T.J.; Livingston, S.J. Data assimilation to extract soil moisture information from SMAP observations. Remote. Sens. 2017, 9, 1179. [Google Scholar] [CrossRef]
- Reichle, R.H.; Liu, Q. Observation-Corrected Precipitation Estimates in GEOS-5; National Aeronautics and Space Administration (NASA) Goddard Space Flight Center: Greenbelt, MD, USA, 2014.
- Hu, L.; Di, L.; Yu, E.; Yue, P.; Tang, J.; Lin, L.; Zhang, C.; Sun, Z.; Hu, R.; Shrestha, R.; et al. Developing geospatial Web service and system for SMAP soil moisture monitoring. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017; pp. 1–5. [Google Scholar]
- Reichle, R.; De Lannoy, G.; Koster, R.D.; Crow, W.T.; Kimbal, J.S.; Liu, Q. SMAP L4 Global 9 km EASE-Grid Surface and Root Zone Soil Moisture Land Model Constants, Version 4; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2018.
- FEMA Flood Map Service Center: Search All Products. Available online: https://msc.fema.gov/portal/advanceSearch#searchresultsanchor (accessed on 19 April 2018).
- Flood Zones|FEMA.gov. Available online: https://www.fema.gov/flood-zones (accessed on 19 April 2018).
- Han, W.; Yang, Z.; Di, L.; Mueller, R. CropScape: A Web service based application for exploring and disseminating US conterminous geospatial cropland data products for decision support. Comput. Electron. Agric. 2012, 84, 111–123. [Google Scholar] [CrossRef]
- SDMI. Mapping the Extent of Louisiana’s Floods; Stephenson Disaster Management Institute: Baton Rouge, LA, USA, 2016; Available online: https://www.sdmi.lsu.edu/mapping-the-extent-of-louisianas-floods/ (accessed on 23 May 2018).
- Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.-P. A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote. Sens. 2018, 10, 217. [Google Scholar] [CrossRef]
- Amitrano, D.; Di Martino, G.; Iodice, A.; Riccio, D.; Ruello, G. Unsupervised Rapid Flood Mapping Using Sentinel-1 GRD SAR Images. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 3290–3299. [Google Scholar] [CrossRef]
- Psomiadis, E. Flash flood area mapping utilising SENTINEL-1 radar data. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications VII, International Society for Optics and Photonics, Edinburgh, UK, 27–29 September 2016; Volume 10005, p. 100051G. [Google Scholar]
- Step by Step: Recommended Practice Flood Mapping. Available online: http://www.un-spider.org/advisory-support/recommended-practices/recommended-practice-flood-mapping/step-by-step (accessed on 10 December 2018).
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood extent mapping for Namibia using change detection and thresholding with SAR. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. SAR-based detection of flooded vegetation—A review of characteristics and approaches. Int. J. Remote. Sens. 2018, 39, 2255–2293. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flood Event | DR No. by FEMA | Event Duration | State | No. of Affected Counties | Data Used for Validation |
|---|---|---|---|---|---|
| Houston Flood | DR- 4332 | August 23–September 15, 2017 | Texas | 42 | Flood map derived from Sentinel-1 |
| Baton Rouge Flood | DR- 4277 | August 11–September 10, 2016 | Louisiana | 24 | FEMA-SDMI flood map |
| May 2017 Missouri Flood | DR- 4317 | April 28–May 11, 2017 | Missouri | 30 | Flood map derived from Sentinel-1 |
| March 2016 Mississippi Flood | DR- 4268 | March 9–March 28, 2016 | Mississippi | 17 | No data for validation |
| May 2016 Texas Flood | DR- 4272 | May 22–June 24, 2016 | Texas | 20 | No data for validation |
| Non-Flood (Hectare) | Flood (Hectare) | Total (Hectare) | User Accuracy | Errors of Commission | |
|---|---|---|---|---|---|
| Non-Flood (hectare) | 6,062,733 | 57,930 | 6,120,663 | 0.99 | 0.01 |
| Flood (hectare) | 190,228 | 142,889 | 333,117 | 0.43 | 0.57 |
| Total (hectare) | 6,252,961 | 200,819 | 6,453,780 | ||
| Producer Accuracy | 0.97 | 0.71 | Overall Agreement | 0.96 | |
| Errors of Omission | 0.03 | 0.29 |
| Non-Flood (Hectare) | Flood (Hectare) | Total (Hectare) | User Accuracy | Errors of Commission | |
|---|---|---|---|---|---|
| Non-Flood (hectare) | 1,742,973 | 411,934 | 2,154,907 | 0.81 | 0.19 |
| Flood (hectare) | 283,956 | 581,695 | 865,651 | 0.67 | 0.33 |
| Total (hectare) | 2,026,929 | 993,629 | 3,020,558 | ||
| Producer Accuracy | 0.86 | 0.59 | Overall Agreement | 0.77 | |
| Errors of Omission | 0.14 | 0.41 |
| Non-Flood (Hectare) | Flood (Hectare) | Total (Hectare) | User Accuracy | Errors of Commission | |
|---|---|---|---|---|---|
| Non-Flood (hectare) | 7,958,284 | 52,364 | 8,010,649 | 0.99 | 0.01 |
| Flood (hectare) | 37,959 | 53,832 | 91,791 | 0.59 | 0.41 |
| Total (hectare) | 7,996,243 | 106,196 | 8,102,439 | ||
| Producer Accuracy | 1.00 | 0.51 | Overall Agreement | 0.99 | |
| Errors of Omission | 0.00 | 0.49 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.S.; Di, L.; Yu, E.; Lin, L.; Zhang, C.; Tang, J. Rapid Flood Progress Monitoring in Cropland with NASA SMAP. Remote Sens. 2019, 11, 191. https://doi.org/10.3390/rs11020191
Rahman MS, Di L, Yu E, Lin L, Zhang C, Tang J. Rapid Flood Progress Monitoring in Cropland with NASA SMAP. Remote Sensing. 2019; 11(2):191. https://doi.org/10.3390/rs11020191
Chicago/Turabian StyleRahman, Md. Shahinoor, Liping Di, Eugene Yu, Li Lin, Chen Zhang, and Junmei Tang. 2019. "Rapid Flood Progress Monitoring in Cropland with NASA SMAP" Remote Sensing 11, no. 2: 191. https://doi.org/10.3390/rs11020191
APA StyleRahman, M. S., Di, L., Yu, E., Lin, L., Zhang, C., & Tang, J. (2019). Rapid Flood Progress Monitoring in Cropland with NASA SMAP. Remote Sensing, 11(2), 191. https://doi.org/10.3390/rs11020191