Estimating High Spatio-Temporal Resolution Rainfall from MSG1 and GPM IMERG Based on Machine Learning: Case Study of Iran


Abstract
1. Introduction
2. Data and Method
2.1. Rainfall Retrieval Development
2.2. Predictor Dataset
2.3. GPM IMERG Training and Validation Data
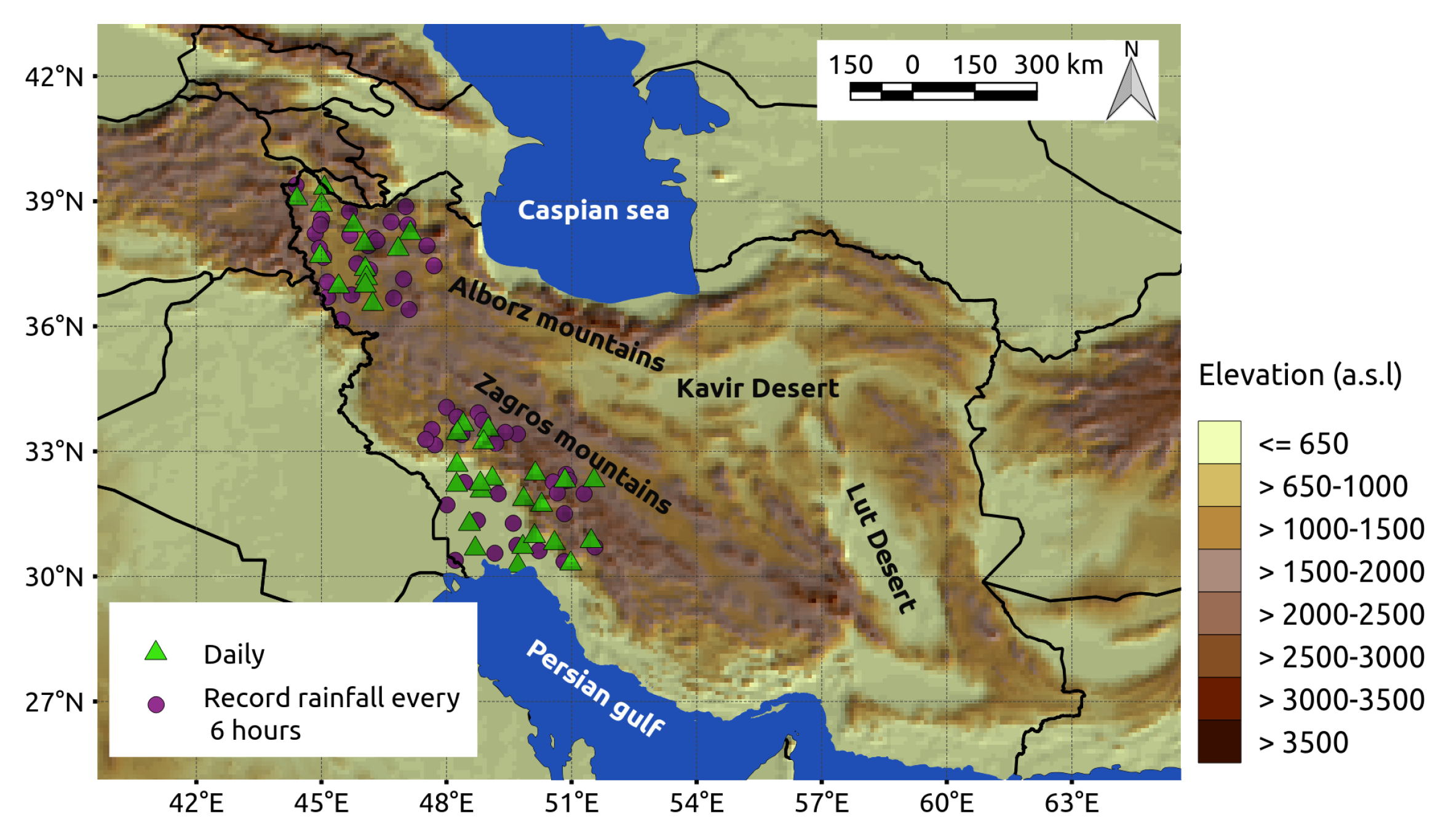
2.4. Station Data for Independent Point Validation
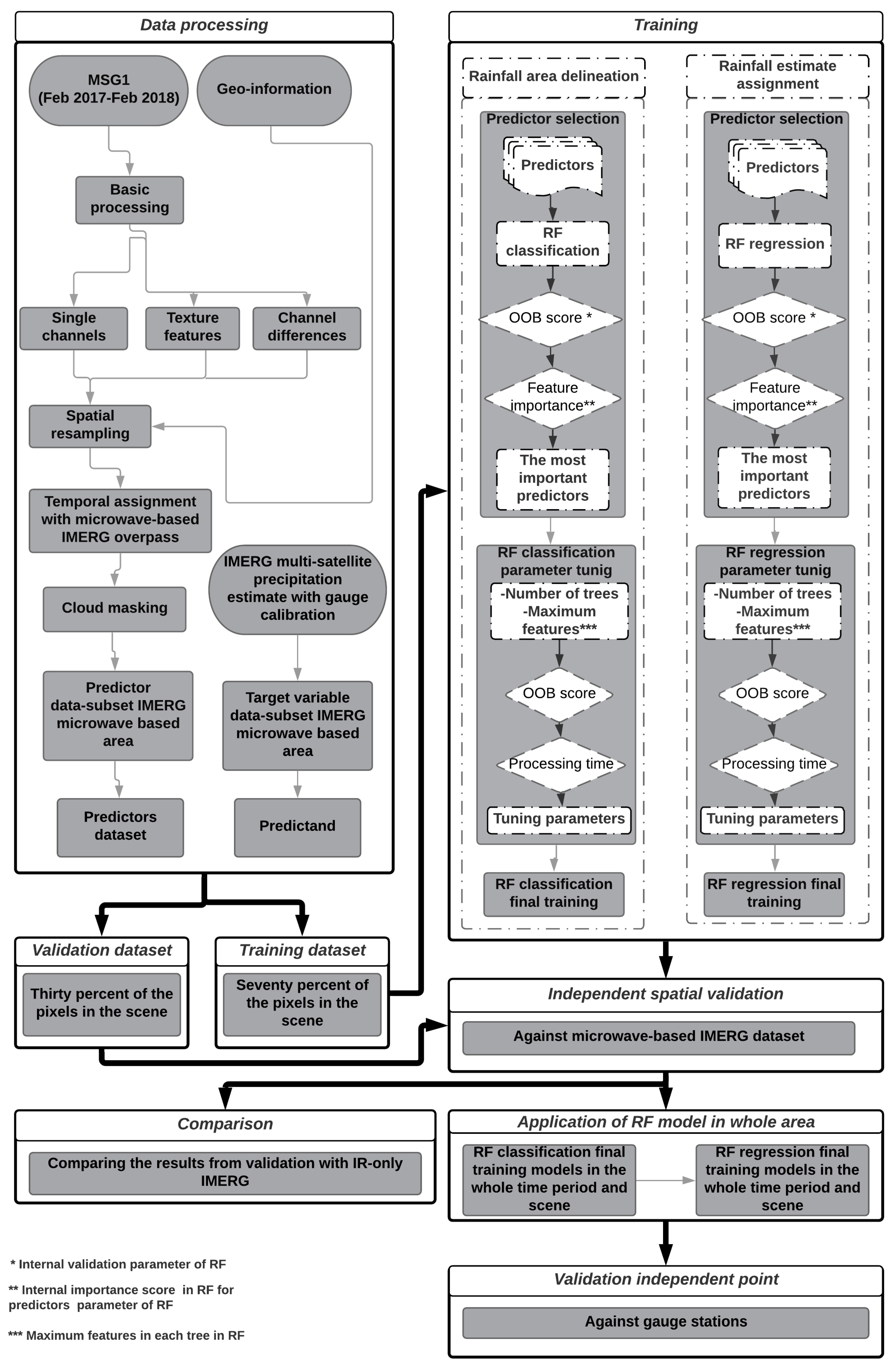
2.5. Data Processing
2.6. Model Training and Tuning
2.7. Application of the Rainfall Retrieval Model
2.8. Validation
- The performances of the trained rainfall area delineation and rainfall rate assignment models were investigated on a scene-by-scene basis, using 30% of the independent pixels from each scene.
- The overall performance of the rainfall area delineation and rainfall rate assignment was investigated against gauge station after application of the model in the whole study area for the whole time period.
3. Results
3.1. Training Results
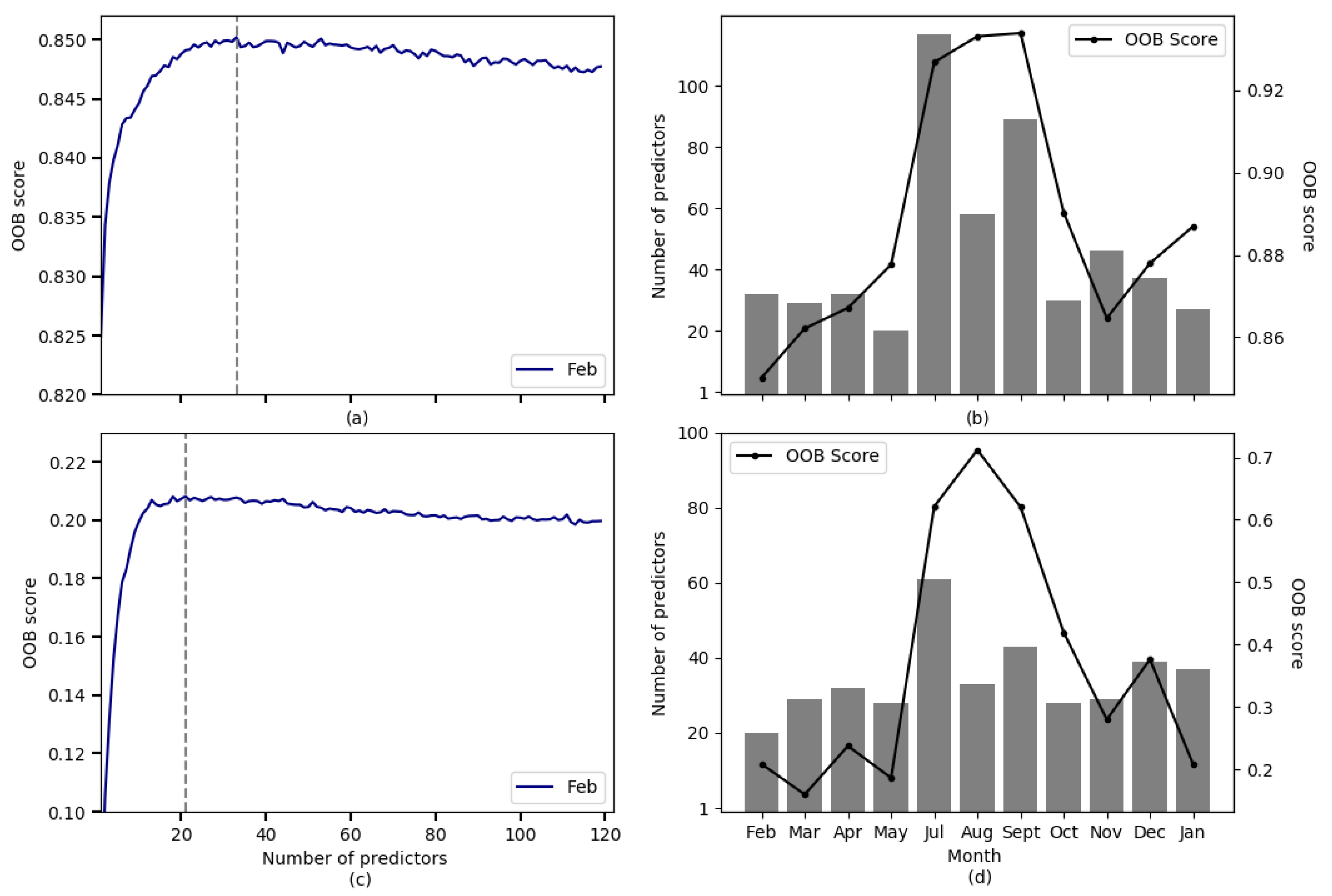
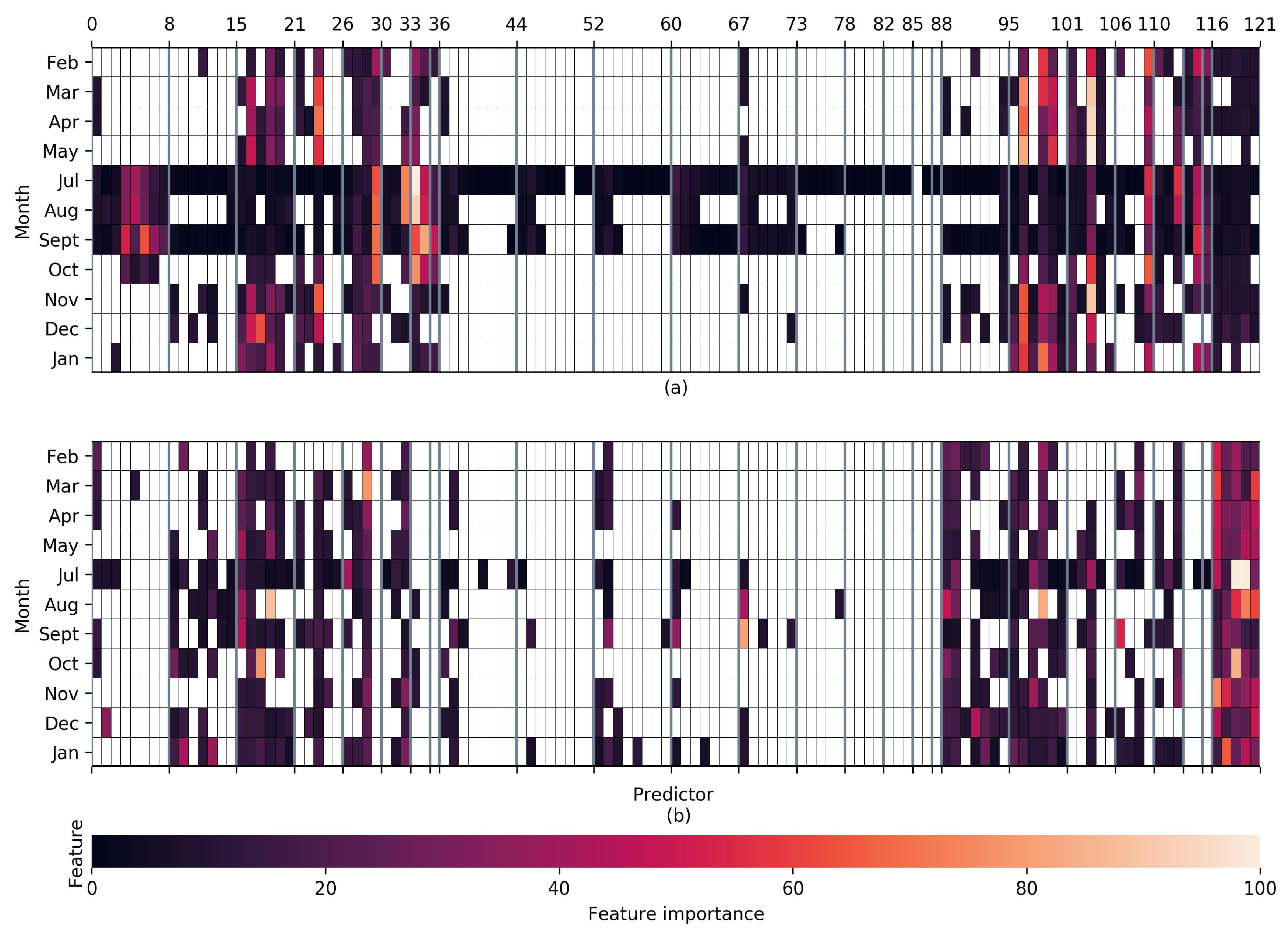
3.1.1. Results of Recursive Feature Elimination
3.1.2. Parameter Tuning
3.2. Accuracy of Rain Area and Rainfall Retrieval
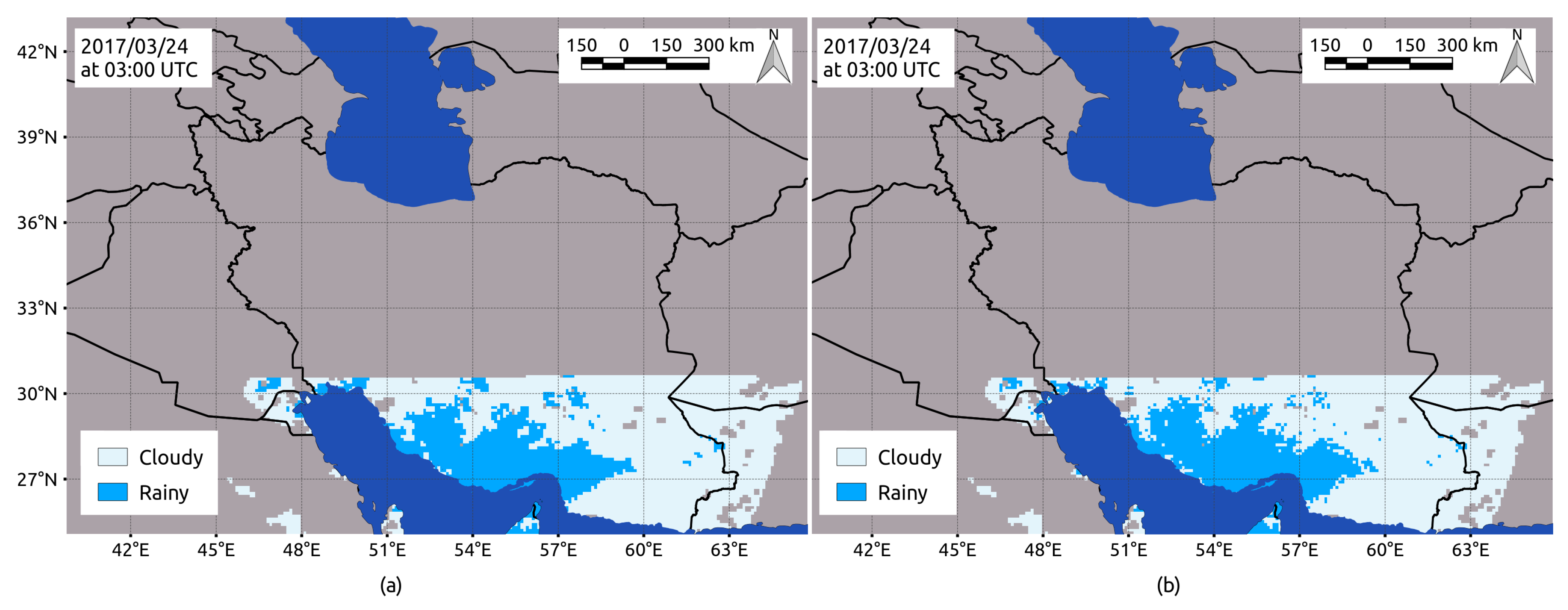
3.2.1. Rainfall Area Delineation
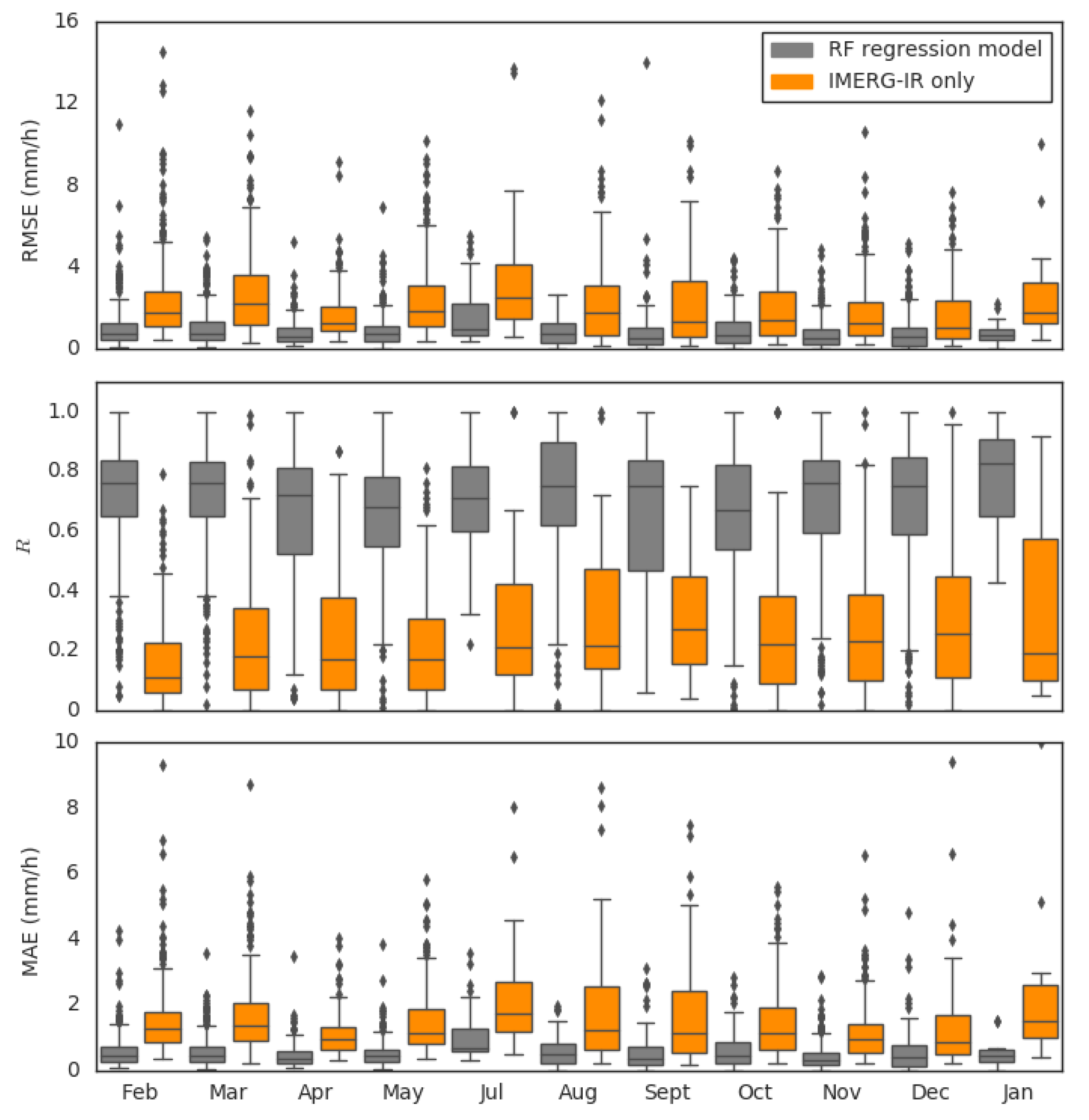
3.2.2. Rainfall Rate Assessment
3.2.3. Overall Performance of the Merged Rainfall Retrieval Model (Rain Area and Rate)
3.2.4. Comparison to Gauge Stations
4. Discussion
4.1. Performance of Rain Area and Rainfall Retrieval Model
4.2. Comparison to Gauge Stations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
| 1-IR 3.9 | 33-T 9.7-13.4 | 65-CV 3.9-10.8 | 97-PCV 6.2-8.7 |
| 2-WV 6.2 | 34-T 10.8-12.0 | 66-CV 3.9-12.0 | 98-PCV 6.2-9.7 |
| 3-WV 7.3 | 35-T 10.8-13.4 | 67-CV 3.9-13.4 | 99-PCV 6.2-10.8 |
| 4-IR 8.7 | 36-T 12.0-13.4 | 68-CV 6.2-7.3 | 100-PCV 6.2-12.0 |
| 5-IR 9.7 | 37-VAR(3.9) | 69-CV 6.2-8.7 | 101-PCV 6.2-13.4 |
| 6-IR 10.8 | 38-VAR(6.2) | 70-CV 6.2-9.7 | 102-PCV 7.3-8.7 |
| 7-IR 12.0 | 39-VAR(7.3) | 71-CV 6.2-10.8 | 103-PCV 7.3-9.7 |
| 8-IR 13.4 | 40-VAR(8.7) | 72-CV 6.2-12.0 | 104-PCV 7.3-10.8 |
| 9-T 3.9-6.2 | 41-VAR(9.7) | 73-CV 6.2-13.4 | 105-PCV 7.3-12.0 |
| 10-T 3.9-7.3 | 42-VAR(10.8) | 74-CV 7.3-8.7 | 106-PCV 7.3-13.4 |
| 11-T 3.9-8.7 | 43-VAR(12.0) | 75-CV 7.3-9.7 | 107-PCV 8.7-9.7 |
| 12-T 3.9-9.7 | 44-VAR(13.4) | 76-CV 7.3-10.8 | 108-PCV 8.7-10.8 |
| 13-T 3.9-10.8 | 45-MAD(3.9) | 77-CV 7.3-12.0 | 109-PCV 8.7-12.0 |
| 14-T 3.9-12.0 | 46-MAD(6.2) | 78-CV 7.3-13.4 | 110-PCV 8.7-13.4 |
| 15-T 3.9-13.4 | 47-MAD(7.3) | 79-CV 8.7-9.7 | 111-PCV 9.7-10.8 |
| 16-T 6.2-7.3 | 48-MAD(8.7) | 80-CV 8.7-10.8 | 112-PCV 9.7-12.0 |
| 17-T 6.2-8.7 | 49-MAD(9.7) | 81-CV 8.7-12.0 | 113-PCV 9.7-13.4 |
| 18-T 6.2-9.7 | 50-MAD(10.8) | 82-CV 8.7-13.4 | 114-PCV 10.8-12.0 |
| 19-T 6.2-10.8 | 51-MAD(12.0) | 83-CV 9.7-10.8 | 115-PCV 10.8-13.4 |
| 20-T 6.2-12.0 | 52-MAD(13.4) | 84-CV 9.7-12.0 | 116-PCV 12.0-13.4 |
| 21-T 6.2-13.4 | 53-ROD(3.9) | 85-CV 9.7-13.4 | 117-ELV |
| 22-T 7.3-8.7 | 54-ROD(6.2) | 86-CV 10.8-12.0 | 118-TPI |
| 23-T 7.3-9.7 | 55-ROD(7.3) | 87-CV 10.8-13.4 | 119-TRI |
| 24-T 7.3-10.8 | 56-ROD(8.7) | 88-CV 12.0-13.4 | 120-Slope |
| 25-T 7.3-12 | 57-ROD(9.7) | 89-PCV 3.9-6.2 | 121-Aspect |
| 26-T 7.3-13.4 | 58-ROD(10.8) | 90-PCV 3.9-7.3 | |
| 27-T 8.7-9.7 | 59-ROD(12.0) | 91-PCV 3.9-8.7 | |
| 28-T 8.7-10.8 | 60-ROD(13.4) | 92-PCV 3.9-9.7 | |
| 29-T 8.7-12.0 | 61-CV 3.9-6.2 | 93-PCV 3.9-10.8 | |
| 30-T 8.7-13.4 | 62-CV 3.9-7.3 | 94-PCV 3.9-12.0 | |
| 31-T 9.7-10.8 | 63-CV 3.9-8.7 | 95-PCV 3.9-13.4 | |
| 32-T 9.7-12.0 | 64-CV 3.9-9.7 | 96-PCV 6.2-7.3 |
References
- Dore, M.H.I. Climate change and changes in global precipitation patterns: What do we know? Environ. Int. 2005, 31, 1167–1181. [Google Scholar] [CrossRef]
- Amiri, M.J.; Eslamian, S.S. Investigation of Climate Change in Iran. J. Environ. Sci. Technol. 2010. [Google Scholar] [CrossRef]
- Lelieveld, J.; Hadjinicolaou, P.; Kostopoulou, E.; Chenoweth, J.; El Maayar, M.; Giannakopoulos, C.; Hannides, C.; Lange, M.A.; Tanarhte, M.; Tyrlis, E.; et al. Climate change and impacts in the Eastern Mediterranean and the Middle East. Clim. Chang. 2012, 114, 667–687. [Google Scholar] [CrossRef]
- Modarres, R.; Sarhadi, A. Rainfall trends analysis of Iran in the last half of the twentieth century. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Modarres, R.; da Silva, V.d.P.R. Rainfall trends in arid and semi-arid regions of Iran. J. Arid Environ. 2007, 70, 344–355. [Google Scholar] [CrossRef]
- Raziei, T.; Saghafian, B.; Paulo, A.A.; Pereira, L.S.; Bordi, I. Spatial Patterns and Temporal Variability of Drought in Western Iran. Water Resour. Manag. 2009, 23, 439. [Google Scholar] [CrossRef]
- Kimani, M.W.; Hoedjes, J.C.B.; Su, Z. An Assessment of Satellite-Derived Rainfall Products Relative to Ground Observations over East Africa. Remote Sens. 2017, 9, 430. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-Global, Multiyear, Combined-Sensor Precipitation Estimates at Fine Scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A Method that Produces Global Precipitation Estimates from Passive Microwave and Infrared Data at High Spatial and Temporal Resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Behrangi, A.; Hsu, K.L.; Imam, B.; Sorooshian, S.; Huffman, G.J.; Kuligowski, R.J. PERSIANN-MSA: A Precipitation Estimation Method from Satellite-Based Multispectral Analysis. J. Hydrometeorol. 2009, 10, 1414–1429. [Google Scholar] [CrossRef]
- Sapiano, M.R.P.; Arkin, P.A. An Intercomparison and Validation of High-Resolution Satellite Precipitation Estimates with 3-Hourly Gauge Data. J. Hydrometeorol. 2009, 10, 149–166. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.; Joyce, R.; Xie, P.; Yoo, S.H. NASA global precipitation measurement (GPM) integrated multi-satellite retrievals for GPM (IMERG). Algorithm Theor. Basis Doc. 2015, 4, 30. [Google Scholar]
- Olson, W.S.; Masunaga, H.; The GPM Combined Radar-Radiometer Algorithm Team. GPM Combined Radar-Radiometer Precipitation Algorithm Theoretical Basis Document (Version 4); NASA: Washington, DC, USA, 2016.
- Kidd, C.; Levizzani, V. Status of satellite precipitation retrievals. Hydrol. Earth Syst. Sci. 2011, 15, 1109–1116. [Google Scholar] [CrossRef]
- Feidas, H.; Giannakos, A. Classifying convective and stratiform rain using multispectral infrared Meteosat Second Generation satellite data. Theor. Appl. Climatol. 2012, 108, 613–630. [Google Scholar] [CrossRef]
- Giannakos, A.; Feidas, H. Classification of convective and stratiform rain based on the spectral and textural features of Meteosat Second Generation infrared data. Theor. Appl. Climatol. 2013, 113, 495–510. [Google Scholar] [CrossRef]
- Kühnlein, M.; Appelhans, T.; Thies, B.; Nauss, T. Improving the accuracy of rainfall rates from optical satellite sensors with machine learning—A random forests-based approach applied to MSG SEVIRI. Remote Sens. Environ. 2014, 141, 129–143. [Google Scholar] [CrossRef]
- Kühnlein, M.; Appelhans, T.; Thies, B.; Nauß, T. Precipitation Estimates from MSG SEVIRI Daytime, Nighttime, and Twilight Data with Random Forests. J. Appl. Meteorol. Climatol. 2014, 53, 2457–2480. [Google Scholar] [CrossRef]
- Meyer, H.; Drönner, J.; Nauss, T. Satellite based high resolution mapping of rainfall over Southern Africa. Atmos. Meas. Tech. 2017, 10, 2009–2019. [Google Scholar] [CrossRef]
- Meyer, H.; Kühnlein, M.; Appelhans, T.; Nauss, T. Comparison of four machine learning algorithms for their applicability in satellite-based optical rainfall retrievals. Atmos. Res. 2016, 169, 424–433. [Google Scholar] [CrossRef]
- Hsu, K.l.; Gao, X.; Sorooshian, S.; Gupta, H.V. Precipitation estimation from remotely sensed information using artificial neural networks. J. Appl. Meteorol. 1997, 36, 1176–1190. [Google Scholar] [CrossRef]
- Grimes, D.; Coppola, E.; Verdecchia, M.; Visconti, G. A neural network approach to real-time rainfall estimation for Africa using satellite data. J. Hydrometeorol. 2003, 4, 1119–1133. [Google Scholar] [CrossRef]
- Hong, Y.; Hsu, K.L.; Sorooshian, S.; Gao, X. Precipitation estimation from remotely sensed imagery using an artificial neural network cloud classification system. J. Appl. Meteorol. 2004, 43, 1834–1853. [Google Scholar] [CrossRef]
- Tapiador, F.; Kidd, C.; Hsu, K.L.; Marzano, F. Neural networks in satellite rainfall estimation. Meteorol. Appl. 2004, 11, 83–91. [Google Scholar] [CrossRef]
- Capacci, D.; Conway, B. Delineation of precipitation areas from MODIS visible and infrared imagery with artificial neural networks. Meteorol. Appl. 2005, 12, 291–305. [Google Scholar] [CrossRef]
- Rivolta, G.; Marzano, F.; Coppola, E.; Verdecchia, M. Artificial neural-network technique for precipitation nowcasting from satellite imagery. Adv. Geosci. 2006, 7, 97–103. [Google Scholar] [CrossRef]
- Islam, T.; Rico-Ramirez, M.A.; Srivastava, P.K.; Dai, Q. Non-parametric rain/no rain screening method for satellite-borne passive microwave radiometers at 19–85 GHz channels with the Random Forests algorithm. Int. J. Remote Sens. 2014, 35, 3254–3267. [Google Scholar] [CrossRef]
- Min, M.; Bai, C.; Guo, J.; Sun, F.; Liu, C.; Wang, F.; Xu, H.; Tang, S.; Li, B.; Di, D.; et al. Estimating Summertime Precipitation from Himawari-8 and Global Forecast System Based on Machine Learning. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2557–2570. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Svetnik, V.; Liaw, A.; Tong, C.; Culberson, J.C.; Sheridan, R.P.; Feuston, B.P. Random forest: A classification and regression tool for compound classification and QSAR modeling. J. Chem. Inf. Comput. Sci. 2003, 43, 1947–1958. [Google Scholar] [CrossRef]
- Javanmard, S.; Yatagai, A.; Nodzu, M.I.; BodaghJamali, J.; Kawamoto, H. Comparing high-resolution gridded precipitation data with satellite rainfall estimates of TRMM_3B42 over Iran. Adv. Geosci. 2010, 25, 119–125. [Google Scholar] [CrossRef]
- Moazami, S.; Golian, S.; Kavianpour, M.R.; Hong, Y. Comparison of PERSIANN and V7 TRMM Multi-satellite Precipitation Analysis (TMPA) products with rain gauge data over Iran. Int. J. Remote Sens. 2013, 34, 8156–8171. [Google Scholar] [CrossRef]
- Katiraie-Boroujerdy, P.S.; Nasrollahi, N.; Hsu, K.L.; Sorooshian, S. Evaluation of satellite-based precipitation estimation over Iran. J. Arid Environ. 2013, 97, 205–219. [Google Scholar] [CrossRef]
- Sharifi, E.; Steinacker, R.; Saghafian, B. Assessment of GPM-IMERG and Other Precipitation Products against Gauge Data under Different Topographic and Climatic Conditions in Iran: Preliminary Results. Remote Sens. 2016, 8, 135. [Google Scholar] [CrossRef]
- Thies, B.; Nauß, T.; Bendix, J. Precipitation process and rainfall intensity differentiation using Meteosat Second Generation Spinning Enhanced Visible and Infrared Imager data. J. Geophys. Res. 2008, 113, 1121. [Google Scholar] [CrossRef]
- Drönner, J.; Egli, S.; Thies, B.; Bendix, J.; Seeger, B. FFLSD—Fast Fog and Low Stratus Detection tool for large satellite time-series. Comput. Geosci. 2019, 128, 51–59. [Google Scholar] [CrossRef]
- Finkensieper, S.; Meirink, J.; van Zadelhoff, G.; Hanschmann, T.; Benas, N.; Stengel, M.; Fuchs, P.; Hollmann, R.; Werscheck, M. CLAAS-2: CM SAF CLoud property dAtAset using SEVIRI–Edition 2, Satellite Application Facility on Climate Monitoring. Satellite Appl. Facil. Clim. Monit. 2016. [Google Scholar] [CrossRef]
- Cermak, J.; Bendix, J. A novel approach to fog/low stratus detection using Meteosat 8 data. Atmos. Res. 2008, 87, 279–292. [Google Scholar] [CrossRef]
- Egli, S.; Thies, B.; Bendix, J. A Hybrid Approach for Fog Retrieval Based on a Combination of Satellite and Ground Truth Data. Remote Sens. 2018, 10, 628. [Google Scholar] [CrossRef]
- Egli, S.; Thies, B.; Drönner, J.; Cermak, J.; Bendix, J. A 10 year fog and low stratus climatology for Europe based on Meteosat Second Generation data. Q. J. R. Meteorol. Soc. 2017, 143, 530–541. [Google Scholar] [CrossRef]
- Schulz, H.M.; Li, C.F.; Thies, B.; Chang, S.C.; Bendix, J. Mapping the montane cloud forest of Taiwan using 12 year MODIS-derived ground fog frequency data. PLoS ONE 2017, 12, e0172663. [Google Scholar] [CrossRef]
- Dinku, T.; Ceccato, P.; Grover-Kopec, E.; Lemma, M.; Connor, S.J.; Ropelewski, C.F. Validation of satellite rainfall products over East Africa’s complex topography. Int. J. Remote Sens. 2007, 28, 1503–1526. [Google Scholar] [CrossRef]
- Akbari, A.; Daryabor, F.; Samah, A.A.; Fanodi, M. Validation of TRMM 3B42 V6 for estimation of mean annual rainfall over ungauged area in semiarid climate. Environ. Earth Sci. 2017, 76, 537. [Google Scholar] [CrossRef]
- Alijanian, M.; Rakhshandehroo, G.R.; Mishra, A.K.; Dehghani, M. Evaluation of satellite rainfall climatology using CMORPH, PERSIANN-CDR, PERSIANN, TRMM, MSWEP over Iran. Int. J. Climatol. 2017, 37, 4896–4914. [Google Scholar] [CrossRef]
- Katiraie-Boroujerdy, P.S.; Ashouri, H.; Hsu, K.L.; Sorooshian, S. Trends of precipitation extreme indices over a subtropical semi-arid area using PERSIANN-CDR. Theor. Appl. Climatol. 2017, 130, 249–260. [Google Scholar] [CrossRef]
- U.S. Geological Survey. Global 30 Arc-Second Elevation (GTOPO30); U.S. Geological Survey: Reston, VA, USA, 2013; p. 30.
- Huffman, G.; Bolvin, D.; Braithwaite, D.; Hsu, K.; Joyce, R.; Kidd, C.; Nelkin, E.; Sorooshian, S.; Tan, J.; Xie, P. NASA Global Precipitation Measurement (GPM) Integrated Multi-satellitE Retrievals for GPM (IMERG) Algorithm Theoretical Basis Document (ATBD) Version 5.2. 2018; NASA: Washington, DC, USA, 2011.
- Huffman, G. IMERG Quality Index; IMERG: Washington, DC, USA, 2018. [Google Scholar]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The Global Precipitation Measurement Mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The elements of statistical learning: Data mining, inference, and prediction, Springer Series in Statistics. Math. Intell. 2005, 27, 83–85. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning: With Applications in R; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Thies, B.; Nauss, T.; Bendix, J. First results on a process-oriented rain area classification technique using Meteosat Second Generation SEVIRI nighttime data. Adv. Geosci. 2008, 16, 63–72. [Google Scholar] [CrossRef][Green Version]
- Kurino, T. A satellite infrared technique for estimating “deep/shallow” precipitation. Adv. Space Res. 1997, 19, 511–514. [Google Scholar] [CrossRef]
- Heinemann, G.; Reudenbach, C.; Heuel, E.; Bendix, J.; Winiger, M. Investigation of summertime convective rainfall in Western Europe based on a synergy of remote sensing data and numerical models. Meteorol. Atmos. Phys. 2001, 76, 23–41. [Google Scholar] [CrossRef]
- Levizzani, V.; Bauer, P.; Joseph Turk, F. Measuring Precipitation from Space: EURAINSAT and the Future; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Chernick, M.R. Bootstrap Methods: A Guide for Practitioners and Researchers; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Tang, G.; Behrangi, A.; Long, D.; Li, C.; Hong, Y. Accounting for spatiotemporal errors of gauges: A critical step to evaluate gridded precipitation products. J. Hydrol. 2018, 559, 294–306. [Google Scholar] [CrossRef]
- Maggioni, V.; Massari, C. On the performance of satellite precipitation products in riverine flood modeling: A review. J. Hydrol. 2018, 558, 214–224. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MGS Band | Derived Data | Ancillary Geo-Information |
|---|---|---|
| IR 3.9 | T (all band combination) | ELV |
| WV 6.2 | VAR (all bands) | TPI |
| WV 7.3 | MAD (all bands) | TRI |
| IR 8.7 | ROD (all bands) | Slope |
| IR 9.7 | CV (all band combination) | Aspect |
| IR 10.8 | PCV (all band combination) |
| Name | Metrics Equation | Range | Optimum |
|---|---|---|---|
| Probability of detection | POD = | [0,1] | 1 |
| False alarm ratio | FAR = | [0,1] | 0 |
| Heike skill score | HSS = | [0,1] | 1 |
| Mean absolute error | MAE = | - | - |
| Root mean square error | RMSE = | - | - |
| Correlation coefficient | R = | [−1,1] | 1 |
| Model Name | Cloudy (Majority Class)/ | POD | FAR | HSS | |||
|---|---|---|---|---|---|---|---|
| Rainy (Minority Class) Pixels | July | October | July | October | July | October | |
| Scenario-0 | 1:1 | 0.84 | 0.85 | 0.80 | 0.75 | 0.22 | 0.30 |
| Scenario-1 | 2:1 | 0.82 | 0.79 | 0.74 | 0.68 | 0.32 | 0.37 |
| Scenario-2 | 3:1 | 0.73 | 0.74 | 0.69 | 0.64 | 0.36 | 0.40 |
| Scenario-3 | 4:1 | 0.71 | 0.68 | 0.68 | 0.61 | 0.37 | 0.42 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turini, N.; Thies, B.; Bendix, J. Estimating High Spatio-Temporal Resolution Rainfall from MSG1 and GPM IMERG Based on Machine Learning: Case Study of Iran. Remote Sens. 2019, 11, 2307. https://doi.org/10.3390/rs11192307
Turini N, Thies B, Bendix J. Estimating High Spatio-Temporal Resolution Rainfall from MSG1 and GPM IMERG Based on Machine Learning: Case Study of Iran. Remote Sensing. 2019; 11(19):2307. https://doi.org/10.3390/rs11192307
Chicago/Turabian StyleTurini, Nazli, Boris Thies, and Joerg Bendix. 2019. "Estimating High Spatio-Temporal Resolution Rainfall from MSG1 and GPM IMERG Based on Machine Learning: Case Study of Iran" Remote Sensing 11, no. 19: 2307. https://doi.org/10.3390/rs11192307
APA StyleTurini, N., Thies, B., & Bendix, J. (2019). Estimating High Spatio-Temporal Resolution Rainfall from MSG1 and GPM IMERG Based on Machine Learning: Case Study of Iran. Remote Sensing, 11(19), 2307. https://doi.org/10.3390/rs11192307