Comparison and Assessment of Regional and Global Land Cover Datasets for Use in CLASS over Canada

 , , ,
, , ,
Abstract
1. Introduction
2. Study Area and Materials
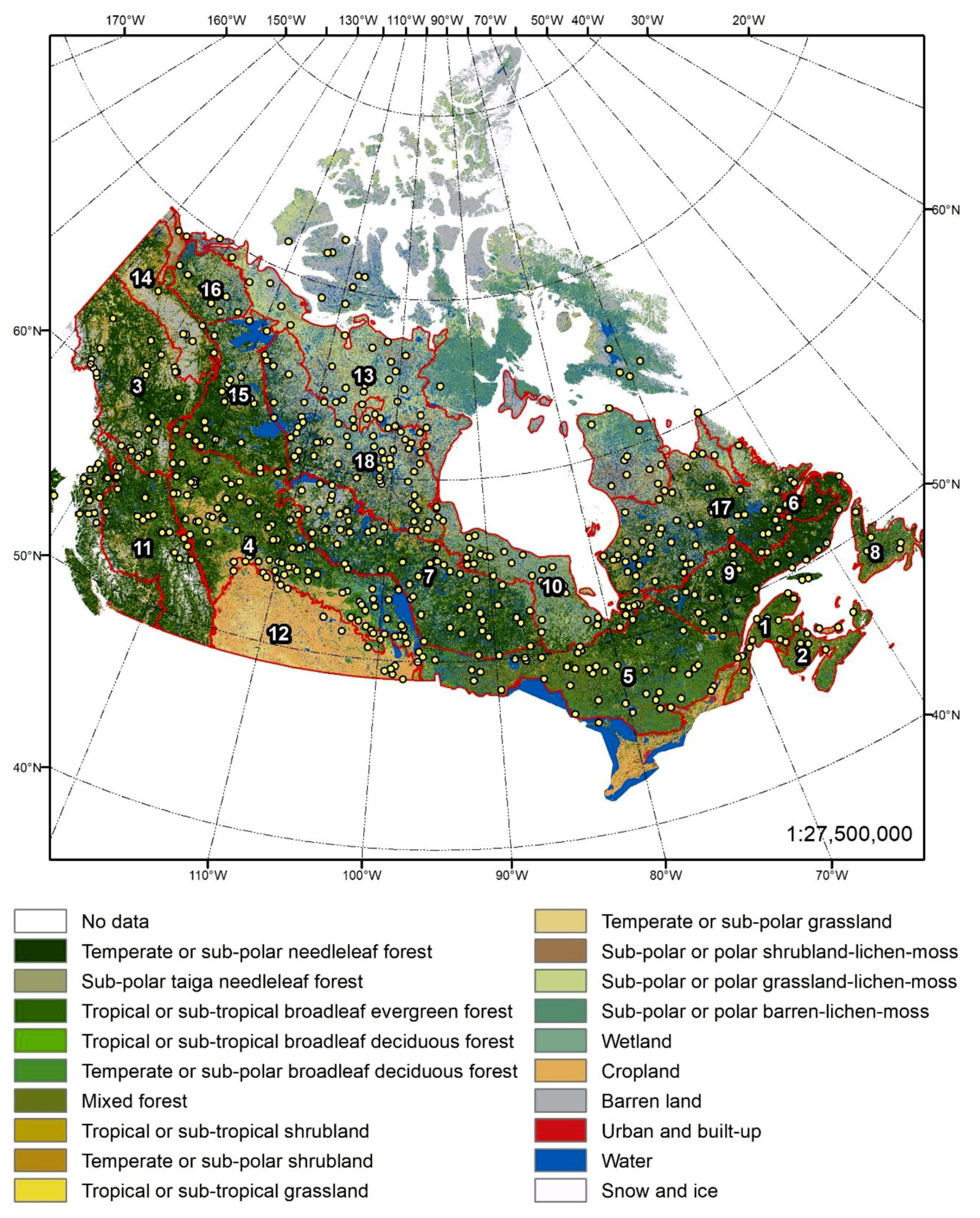
2.1. Study Area
2.2. Reference Sample Data
2.3. Regional LC Datasets Over Canada
2.4. Global LC Datasets
2.5. Tree Cover Fraction Data
3. Methods
3.1. Reclassify to Forest and Non-Forest at 30 m Scale
3.2. Transform to the Common Legend
3.2.1. Reproject to the Common Grid and Convert to the Common Legend
3.2.2. Comparison of LC Datasets at 1 km Scale
3.3. Sub-Pixel Fractional Accuracy at 300 m Scale
3.4. PFT Mapping at 0.5 Degree Scale
4. Results
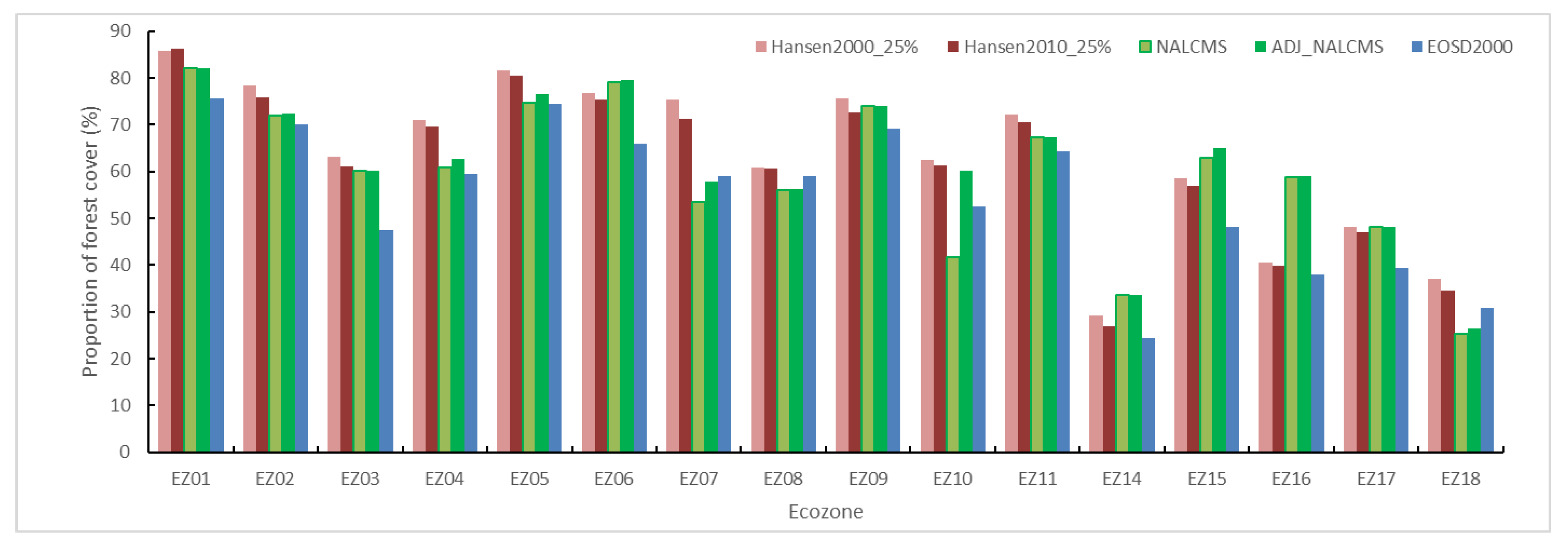
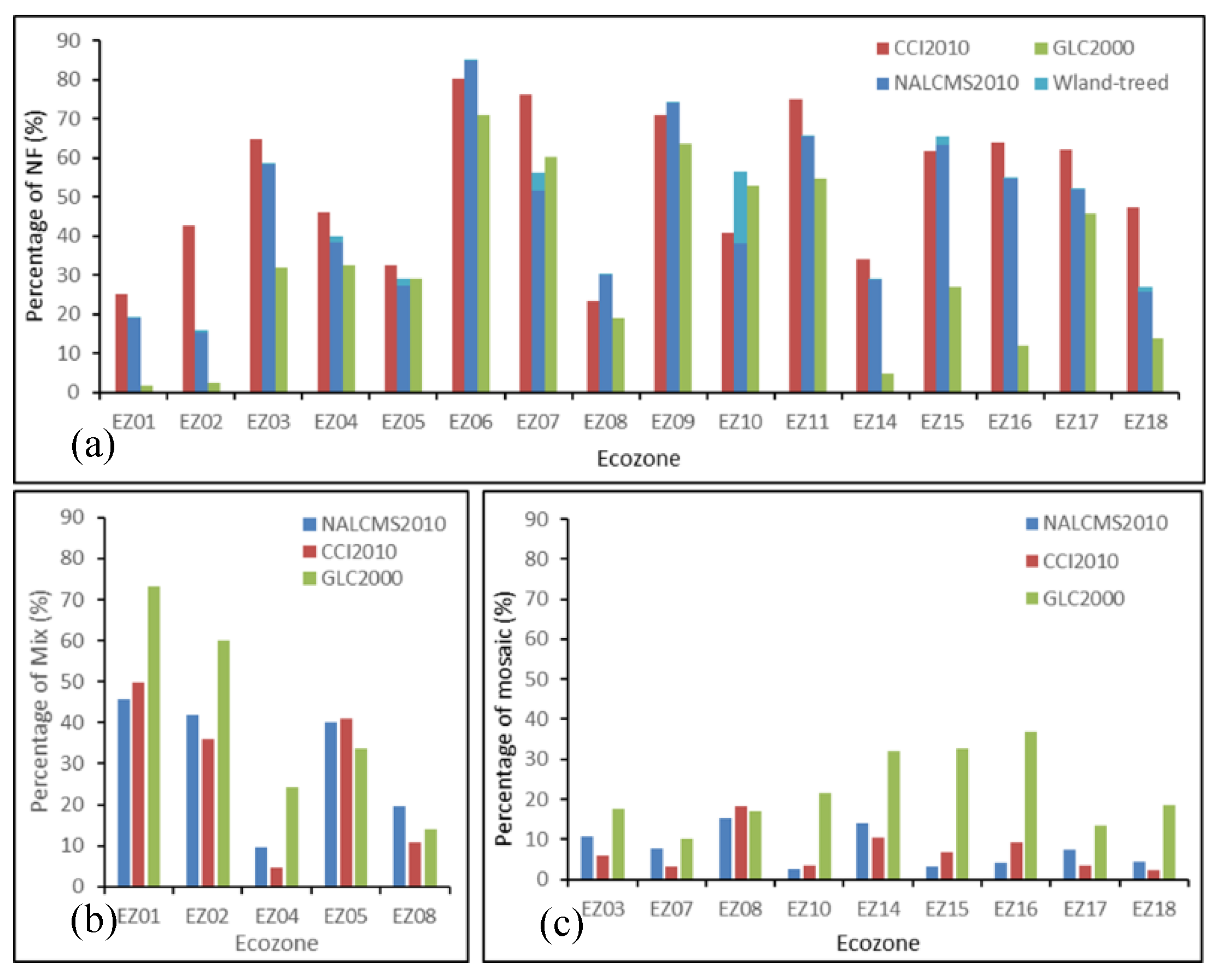
4.1. Comparison of Forest Cover
4.2. Comparison of LC Datasets at 1 km Resolution
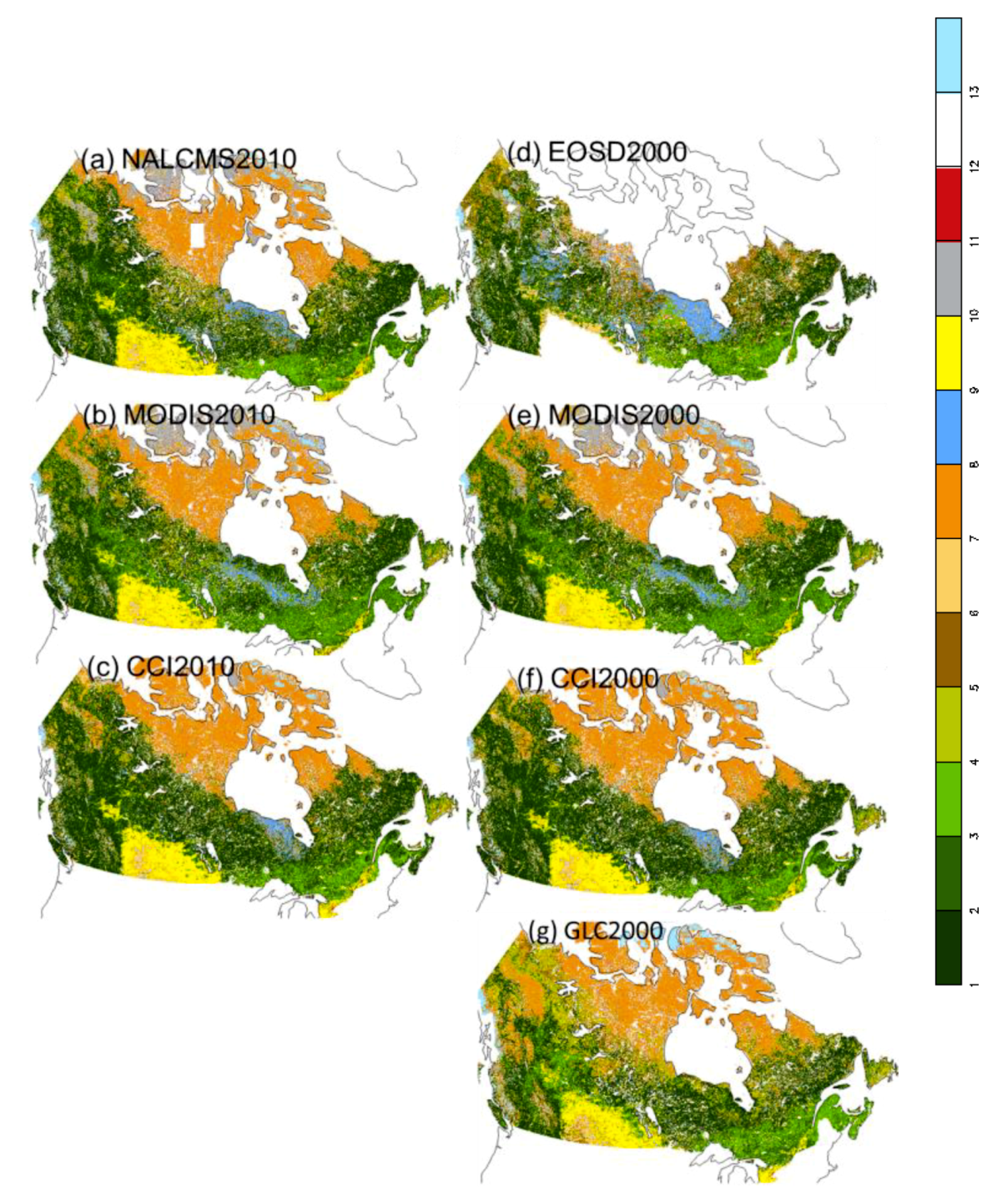
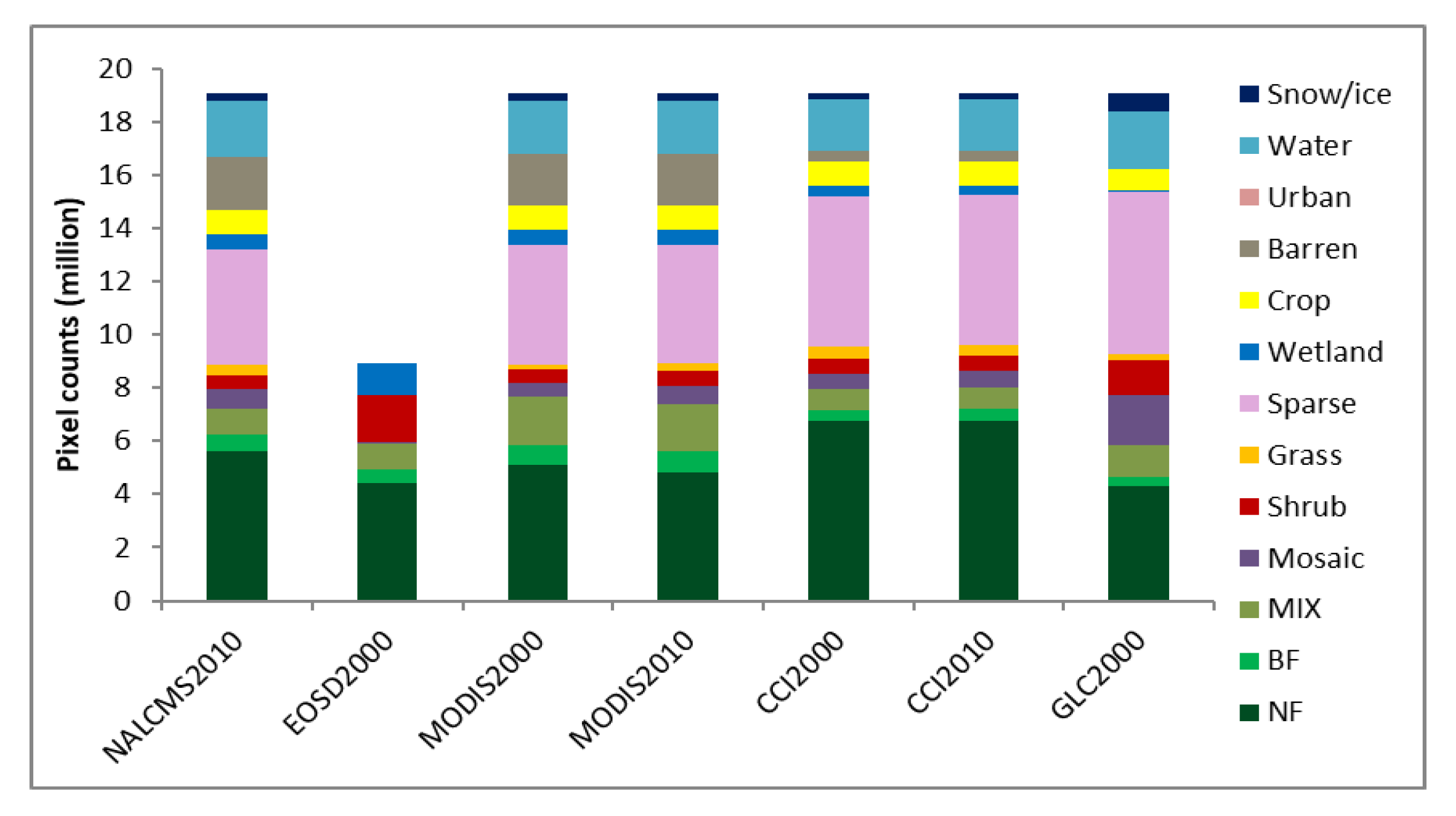
4.2.1. The Spatial Patterns and Pixel Counts
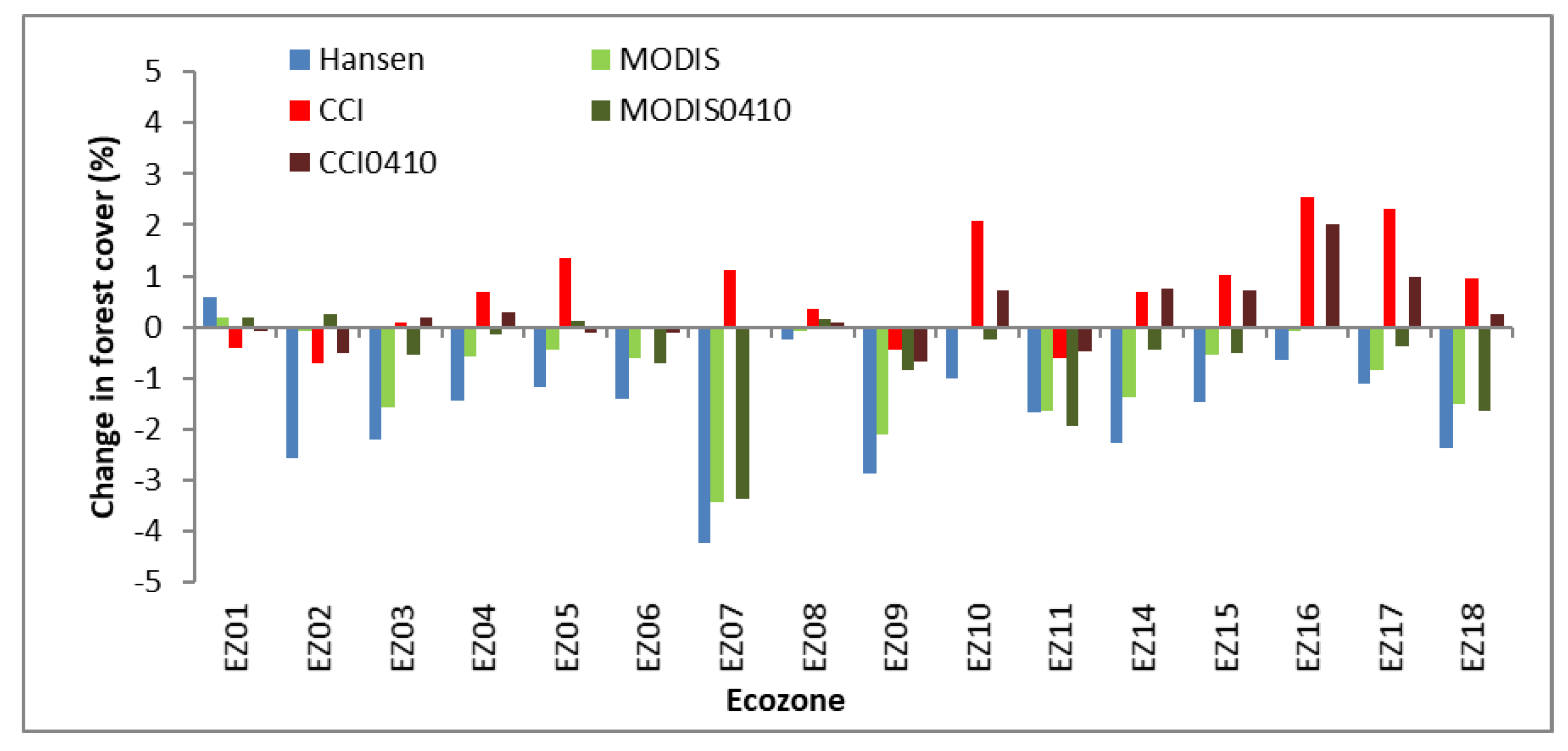
4.2.2. Changes in LC Classes between 2000 and 2010
4.2.3. The Producer and User Accuracies
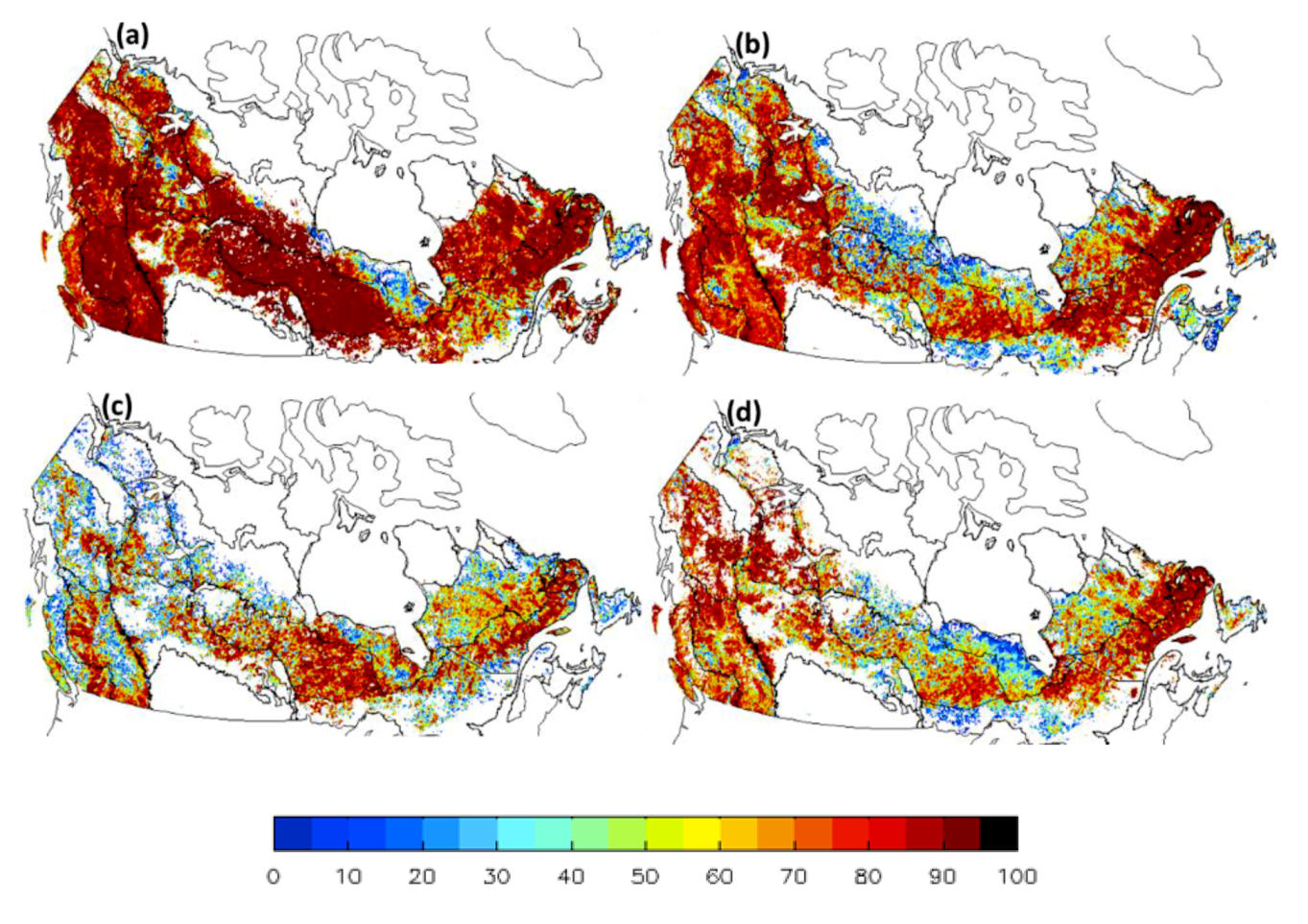
4.3. Sub-Pixel Fractional Error Matrices of CCI
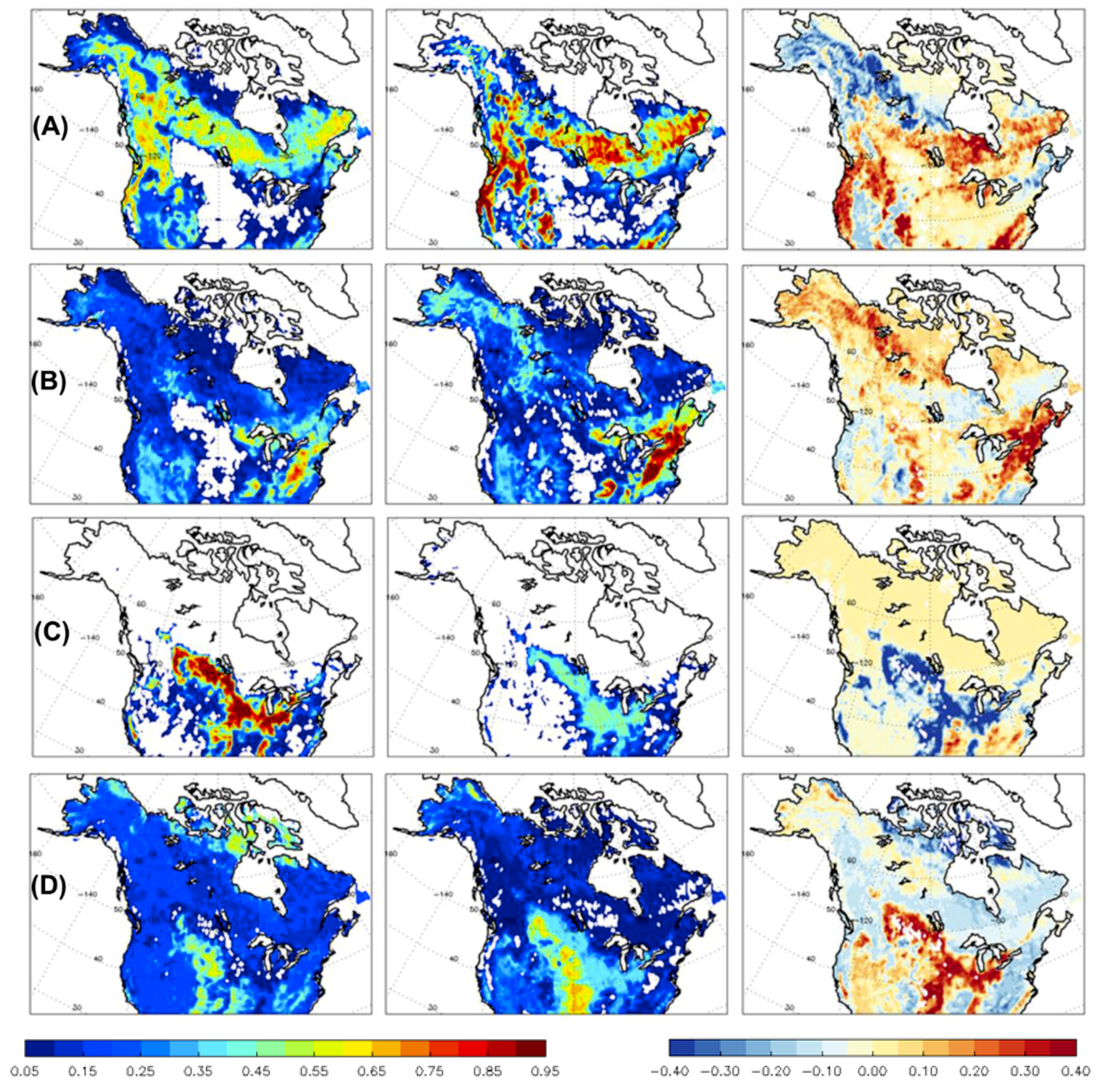
4.4. Comparison of CLASS PFTs Derived from GLC2000 and CCI
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bonan, G.B.; Levis, S.; Kergoat, L.; Oleson, K.W. Landscapes as patches of plant functional types: An integrating concept for climate and ecosystem models. Glob. Biogeochem. Cycles 2002, 16, 1021. [Google Scholar] [CrossRef]
- Verburg, P.H.; Neumann, K.; Nol, L. Challenges in using land use and landcover data for global change studies. Glob. Chang. Biol. 2011, 17, 974–989. [Google Scholar] [CrossRef]
- Pielke, R.A.; Avissar, R.; Raupach, M.; Dolman, A.J.; Zeng, X.; Denning, S. Interactions between the atmosphere and terrestrial ecosystem: Influence on weather and climate. Glob. Chang. Biol. 1998, 4, 461–475. [Google Scholar]
- Sterling, S.M.; Ducharne, A.; Polcher, J. The impact of global land-cover change on the terrestrial water cycle. Nat. Clim. Chang. 2013, 3, 385–390. [Google Scholar] [CrossRef]
- DeFries, R.; Townshend, J. NDVI-derived land cover classifications at a global scale. Int. J. Remote Sens. 1994, 15, 3567–3586. [Google Scholar] [CrossRef]
- Tucker, C.J.; Townshend, J.R.G.; Goff, T.E. African land-cover classification using satellite data. Science 1985, 227, 369–375. [Google Scholar] [CrossRef] [PubMed]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.W.M.J.; Merchant, J.W. Development of a global land cover characteristics database and IGBP DISCover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 216, 1303–1330. [Google Scholar]
- Hansen, M.C.; DeFries, R.S.; Townshend, J.R.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 216, 1331–1364. [Google Scholar]
- Bartholomé, E.; Belward, A.S. GLC2000: A new approach to global land cover mapping from Earth Observation data. Int. J. Remote Sens. 2005, 26, 1959–1977. [Google Scholar]
- Friedl, M.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X. MODIS Collection 5 global land cover: Algorithm refinements and characterization of new datasets. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Bicheron, P.; Defourney, P.; Brockmann, C.; Schouten, L.; Vancutsem, C.; Huc, M.; Bontemps, S.; Leroy, M.; Achard, F.; Herold, M.; et al. GLOBCOVER: Products Description and Validation Report. Toulouse: Medias, France, 2008. Available online: http://ionia1.esrin.esa.int/docs/GLOBCOVER Products Description Validation Report I2.1.pdf (accessed on 1 August 2019).
- Land Cover CCI Product User Guide, Version 2.0. 2017. Available online: http://maps.elie.ucl.ac.be/CCI/viewer/download/ESACCI-LC-Ph2-PUGv2_2.0.pdf (accessed on 1 August 2019).
- Cihlar, J. Land cover mapping of large areas from satellites: Status and research priorities. Int. J. Remote Sens. 2000, 21, 1093–1114. [Google Scholar] [CrossRef]
- Townshend, J.G. Land cover. Int. J. Remote Sens. 1992, 13, 1319–1328. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C.; Roy, D.P.; White, J.C.; Hermosilla, T. Land cover 2.0. Int. J. Remote Sens. 2018, 39, 4254–4284. [Google Scholar] [CrossRef]
- Latifovic, R.; Olthof, I. Accuracy assessment using sub-pixel fractional error matrices of global land cover products derived from satellite data. Remote Sens. Environ. 2004, 90, 153–165. [Google Scholar] [CrossRef]
- Mayaux, P.; Eva, H.; Gallego, J.; Strahler, A.H.; Herold, M.; Agrawal, S.; Naumov, S.; De Miranda, E.E.; Di Bella, C.M.; Ordoyne, C.; et al. Validation of the Global Land Cover 2000 Map. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1728–1739. [Google Scholar] [CrossRef]
- Wulder, M.A.; Franklin, S.E.; White, J.C.; Linke, J.; Magnussen, S. An accuracy assessment framework for large-area land cover classification products derived from medium-resolution satellite data. Int. J. Remote Sens. 2006, 27, 663–683. [Google Scholar] [CrossRef]
- Herold, M.; Mayaux, P.; Woodcock, C.E.; Baccini, A.; Schmullius, C. Some Challenges in Global Land Cover Mapping: An Assessment of Agreement and Accuracy in Existing 1 km Datasets. Remote Sens. Environ. 2008, 112, 2538–2556. [Google Scholar] [CrossRef]
- Tsendbazar, N.E.; de Bruin, S.; Mora, B.; Schouten, L.; Herold, M. Comparative assessment of thematic accuracy of GLC maps for specific applications using existing reference data. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 124–135. [Google Scholar] [CrossRef]
- Verseghy, D.; McFarlane, N.; Lazare, M. Class - A Canadian land surface scheme for GCMs. II: Vegetation model and coupled runs. Int. J. Climatol. 1993, 13, 347–370. [Google Scholar] [CrossRef]
- Verseghy, D. CLASS—The Canadian Land Surface Scheme (Version 3.6.1); Technical Documentation, Technical Report; Climate Research Division, Science and Technology Branch, Environment and Climate Change Canada: Ottawa, ON, Canada, 2009; p. 174. [Google Scholar]
- Bartlett, P.A.; MacKay, M.D.; Verseghy, D.L. Modified snow algorithms in the Canadian land surface scheme: Model runs and sensitivity analysis at three boreal forest stands. Atmos. Ocean 2006, 44, 207–222. [Google Scholar] [CrossRef]
- Bartlett, P.A.; Verseghy, D.L. Modified treatment of intercepted snow improves the simulated forest albedo in the Canadian land surface scheme. Hydrol. Process. 2015, 28, 3208–3226. [Google Scholar] [CrossRef]
- Arora, V.K. Simulating energy and carbon fluxes over winter wheat using coupled land surface and terrestrial ecosystem models. Agric. For. Meteorol. 2003, 118, 21–47. [Google Scholar] [CrossRef]
- Arora, V.K.; Boer, G.J. A parameterization of leaf phenology for the terrestrial ecosystem component of climate models. Glob. Chang. Biol. 2005, 11, 39–59. [Google Scholar] [CrossRef]
- Melton, J.R.; Arora, V.K. Competition between plant functional types in the Canadian Terrestrial Ecosystem Model (CTEM) v. 2.0. Geosci. Model Dev. 2016, 9, 323–361. [Google Scholar] [CrossRef]
- Betts, R.A. Biogeophysical impacts of land use on present-day climate: Near-surface temperature change and radiative forcing. Atmos. Sci. Lett. 2001, 2, 39–51. [Google Scholar] [CrossRef]
- Ballantyne, A.P.; Andres, R.; Houghton, R.; Stocker, B.D.; Wanninkhof, R.; Anderegg, W.; Cooper, L.A.; DeGrandpre, M.; Tans, P.P.; Miller, J.B.; et al. Audit of the global carbon budget: Estimate errors and their impact on uptake uncertainty. Biogeosciences 2015, 12, 2565–2584. [Google Scholar] [CrossRef]
- Moody, E.G.; King, M.D.; Schaaf, C.B.; Hall, D.K.; Platnick, S. Northern Hemisphere five-year average (2000–2004) spectral albedos of surfaces in the presence of snow: Statistics computed from Terra MODIS land products. Remote Sens. Environ. 2007, 111, 337–345. [Google Scholar] [CrossRef]
- Hartley, A.J.; MacBean, N.; Georgievski, G.; Bontemps, S. Uncertainty in plant functional type distributions and its impact on land surface models. Remote Sens. Environ. 2017, 203, 71–89. [Google Scholar] [CrossRef]
- Arora, V.K.; Boer, G.J.; Christian, J.R.; Curry, C.L.; Denman, K.L.; Zahariev, K.; Flato, G.M.; Scinocca, J.F.; Merryfield, W.J.; Lee, W.G. The effect of terrestrial photosynthesis down regulation on the twentieth-century carbon budget simulated with the CCCma Earth system model. J. Clim. 2009, 22, 6066–6088. [Google Scholar] [CrossRef]
- Von Salzen, K.; Scinocca, J.F.; McFarlane, N.A.; Li, J.; Cole, J.N.S.; Plummer, D.; Verseghy, D.; Reader, M.C.; Ma, X.; Lazare, M.; et al. The Canadian Fourth Generation Atmospheric Global Climate Model (CanAM4). Part I: Representation of Physical Processes. Atmos. Ocean 2013, 51, 104–125. [Google Scholar] [CrossRef]
- Wang, L.; Cole, J.N.S.; Bartlett, P.; Verseghy, D.; Derksen, C.; Brown, R.; von Salzen, K. Investigating the spread in surface albedo for snow-covered forests in CMIP5 models. J. Geophys. Res. Atmos. 2016, 121, 1104–1119. [Google Scholar] [CrossRef]
- Bontemps, S.; Herold, M.; Kooistra, L.; van Groenestijn, A.; Hartley, A.; Arino, O.; Moreau, I.; Defourny, P. Revisiting land cover observation to address the needs of the climate modeling community. Biogeosciences 2012, 9, 2145–2157. [Google Scholar] [CrossRef]
- Poulter, B.; Ciais, P.; Hodson, E.; Lischke, H.; Maignan, F.; Plummer, S.; Zimmermann, N.E. Plant functional type mapping for earth system models. Geosci. Model Dev. 2011, 4, 2081–2121. [Google Scholar] [CrossRef]
- Essery, R. Large-scale simulations of snow albedo masking by forests. Geophys. Res. Lett. 2013, 40, 5521–5525. [Google Scholar] [CrossRef]
- Thackeray, C.W.; Qu, X.; Hall, A. Why do models produce spread in snow albedo feedback? Geophys. Res. Lett. 2018, 45, 6223–6231. [Google Scholar] [CrossRef]
- Ecological Stratification Working Group. A National Ecological Framework for Canada; Report and Map at 1:7 500,000 Scale; Agriculture and Agri-Food Canada, Research Branch, Centre for Land and Biological Resources Research: Ottawa, ON, Canada; Environment Canada, State of the Environment Directorate, Ecozone Analysis Branch: Hull, QC, Canada, 1995.
- Latifovic, R.; Pouliot, D.; Olthof, I. Circa 2010 Land Cover of Canada: Local Optimization Methodology and Product Development. Remote Sens. 2017, 9, 1098. [Google Scholar] [CrossRef]
- Di Gregorio, A. Land Cover Classification System—Classification Concepts and User Manual for Software Version 2; FAO Environment and Natural Resources Service Series: Rome, Italy, 2005; p. 208. [Google Scholar]
- Turner, D.P.; Cohen, W.B.; Kennedy, R.E.; Fassnacht, K.S.; Briggs, J.M. Relationships between Leaf Area Index and Landsat TM Spectral Vegetation Indices across Three Temperate Zone Sites. Remote Sens. Environ. 1999, 70, 52–68. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Cranny, M.; Hall, R.J.; Luther, J.E.; Beaudoin, A.; Goodenough, D.G.; Dechka, J.A. Monitoring Canada’s forests. Part 1: Completion of the EOSD land cover project. Can. J. Remote Sens. 2008, 34, 549–562. [Google Scholar] [CrossRef]
- Pouliot, D.; Latifovic, R.; Zabcic, N.; Guindon, L.; Olthof, I. Development and assessment of a 250 m spatial resolution MODIS annual land cover time series (2000–2011) for the forest region of Canada derived from change-based updating. Remote Sens. Environ. 2014, 140, 731–743. [Google Scholar] [CrossRef]
- Latifovic, R.; Pouliot, D.; Olthof, I. North American Land Change Monitoring System: Canadian perspective. In Proceedings of the 30th Canadian Symposium Remote Sensing—Bridging excellence, Lethbridge, AB, Canada, 22–25 June 2009. [Google Scholar]
- Defourny, P.; Bicheron, P.; Brockman, C.; Bontemps, S.; van Bogaert, E.; Vancutsem, C.; Pekel, J.F.; Huc, M.; Henry, C.; Ranera, F.; et al. The first 300 m global land cover map for 2005 using Envisat MERIS time series: A product of the GlobCover system. In Proceedings of the 33rd International Symposium on Remote Sensing of Environment, Stresa, Italy, 4–8 May 2009. [Google Scholar]
- Latifovic, R.; Pouliot, D.A. Multi-Temporal Land Cover Mapping for Canada: Methodology and Products. Can. J. Remote Sens. 2005, 31, 347–363. [Google Scholar] [CrossRef]
- CCI-LC ATBD Phase II v2. Land Cover Climate Change Initiative—Algorithm Specification Document—Part III: LC Classification. Available online: https://www.esa-landcover-cci.org/?q=documents# (accessed on 1 August 2019).
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. Highresolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Hansen, M.C.; DeFries, R.S.; Townshend, J.R.G.; Sohlberg, R.; Dimiceli, C.; Carroll, M.L. Towards an operational MODIS continuous field of percent tree cover algorithm: Examples using AVHRR and MODIS data. Remote Sens. Environ. 2002, 83, 303–319. [Google Scholar] [CrossRef]
- Hansen, M.C.; Stehman, S.V.; Potapov, P.V. Quantification of global gross forest cover loss. Proc. Natl. Acad. Sci. USA 2010, 107, 8650–8655. [Google Scholar] [CrossRef] [PubMed]
- Wulder, M.A.; Nelson, T. EOSD Land Cover Classification Legend Report: Version 2; Natural Resources Canada, Canadian Forest Service, Pacific Forestry Centre: Victoria, BC, Canada, 2003; p. 83.
- Manandhar, R.; Odeh, I.O.A.; Ancev, T. Improving the accuracy of land use and land cover classification of Landsat data using post-classification enhancement. Remote Sens. 2009, 1, 330–344. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Krankina, O.N.; Cohen, W.B.; Friedl, M.A.; Sulla-Menashe, D.; Kennedy, R.E.; Nelson, P.; Loboda, T.V.; Kuemmerle, T.; Dyukarev, E.; et al. Comparison and assessment of coarse resolution land cover maps for Northern Eurasia. Remote Sens. Environ. 2011, 115, 3539–3553. [Google Scholar] [CrossRef]
- Smith, J.H.; Wickham, J.D.; Stehman, S.V.; Yang, L. Impacts of patch size and land-cover heterogeneity on thematic image classification accuracy. Photogramm. Eng. Remote Sens. 2002, 68, 65–70. [Google Scholar]
- Smith, J.H.; Wickham, J.D.; Stehman, S.V.; Yang, L. Effects of landscape characteristics on land-cover class accuracy. Remote Sens. Environ. 2003, 84, 342–349. [Google Scholar] [CrossRef]
- Wang, A.; Price, D.T.; Arora, V.K. Estimating changes in global vegetation cover (1850–2100) for use in climate models. Glob. Biogeochem. Cycles 2006, 20. [Google Scholar] [CrossRef]
- Poulter, B.; MacBean, N.; Hartley, A.; Khlystova, I.; Arino, O.; Betts, R.; Bontemps, S.; Boettcher, M.; Brockmann, C.; Defourny, P.; et al. Plant functional type classification for earth system models: Results from the European Space Agency’s land cover climate change initiative. Geosci. Model Dev. 2015, 8, 2315–2328. [Google Scholar] [CrossRef]
- Vancutsem, C.; Pekel, J.-F.; Bogaert, P.; Defourny, P. Mean Compositing, an alternative strategy for producing temporal syntheses. Concepts and performance assessment for SPOT VEGETA-TION time series. Int. J. Remote Sens. 2007, 28, 5123–5141. [Google Scholar] [CrossRef]
- Li, W.; MacBean, N.; Ciais, P.; Defourny, P.; Lamarche, C.; Bontemps, S.; Houghton, R.A.; Peng, S. Gross and net land cover changes in the main plant functional types derived from the annual ESA CCI land cover maps (1992–2015). Earth Syst. Sci. Data 2018, 10, 219–234. [Google Scholar] [CrossRef]
- Narine, L.L.; Popescu, S.; Neuenshwander, A.; Zhou, T.; Srinivasan, S.; Harbeck, K. Estimating above ground biomass and forest canopy cover with simulated ICESat-2 data. Remote Sens. Environ. 2019, 224, 1–11. [Google Scholar] [CrossRef]
- Wang, L.; Bartlett, P.; Chan, E.; Xiao, M. Mapping of Plant Functional Type from Satellite-Derived Land Cover Datasets for Climate Models. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NALCMS/MODIS | EOSD | CCI | GLC2000 |
|---|---|---|---|
| [1] Temperate or sub-polar needleleaf forest [2] Sub-polar taiga needleleaf forest [3] Tropical or sub-tropical broadleaf evergreen forest [4] Tropical or sub-tropical broadleaf deciduous forest [5] Temperate or sub-polar broadleaf deciduous forest [6] Mixed forest [7] Tropical or sub-tropical shrubland [8] Temperate or sub-polar shrubland [9] Tropical or sub-tropical grassland [10] Temperate or sub-polar grassland [11] Sub-polar or polar shrubland-lichen-moss [12] Sub-polar or polar grassland-lichen-moss [13] Sub-polar or polar barren-lichen-moss [14] Wetland [15] Cropland [16] Barren lands [17] Urban [18] Water [19] Snow and Ice | [11] Cloud [12] Shadow [20] Water [31] Snow/Ice [32] Rock/Rubble [33] Exposed/Barren Land [40] Bryoids [51] Shrub Tall [52] Shrub Low [81] Wetland-treed [82] Wetland-shrub [83] Wetland-herb [100] Herbs [110] Grassland [211] Coniferous-dense [212] Coniferous-open [213] Coniferous-sparse [221] Broadleaf-dense [222] Broadleaf-open [223] Broadleaf-sparse [231] Mixedwood-dense [232] Mixedwood-open [233] Mixedwood-sparse | [10] Cropland rainfed (11) Herbaceous cover (12) Tree or shrub cover [20] Cropland irrigated or post-flooding [30] Mosaic cropland (>50%)/natural vegetation (tree shrub herbaceous cover) (<50%) [40] Mosaic natural vegetation (tree shrub herbaceous cover) (>50%)/cropland (<50%) [50] Tree cover broadleaved evergreen closed to open (>15%) [60] Tree cover broadleaved deciduous closed to open (>15%) (61) Tree cover broadleaved deciduous closed (>40%) (62) Tree cover broadleaved deciduous open (15–40%) [70] Tree cover needleleaved evergreen closed to open (>15%) (71) Tree cover needleleaved evergreen closed (>40%) (72) Tree cover needleleaved evergreen open (15–40%) [80] Tree cover needleleaved deciduous closed to open (>15%) (81) Tree cover needleleaved deciduous closed (>40%) (82) Tree cover needleleaved deciduous open (15–40%) [90] Tree cover mixed leaf type (broadleaved and needleleaved) [100] Mosaic tree and shrub (>50%)/herbaceous cover (<50%) [110] Mosaic herbaceous cover (>50%)/tree and shrub (<50%) [120] Shrubland (121) Shrubland evergreen (122) Shrubland deciduous [130] Grassland [140] Lichens and mosses [150] Sparse vegetation (tree shrub herbaceous cover) (<15%) (151) Sparse tree (<15%) (152) Sparse shrub (<15%) (153) Sparse herbaceous cover (<15%) [160] Tree cover flooded fresh or brakish water [170] Tree cover flooded saline water [180] Shrub or herbaceous cover flooded fresh/saline/brakish water [190] Urban areas [200] Bare areas (201) Consolidated bare areas (202) Unconsolidated bare areas [210] Water bodies [220] Permanent snow and ice | [1] Tree cover, broadleaved, evergreen [2] Tree cover, broadleaved, deciduous, closed [3] Tree cover, broadleaved, deciduous, open [4] Tree cover, needle-leaved, evergreen [5] Tree cover, needle-leaved, deciduous [6] Tree cover, mixed leaf type [7] Tree cover, regularly flooded, fresh water [8] Tree cover, regularly flooded, saline water [9] Mosaic: tree cover/other natural vegetation [10] Tree cover, burnt [11] Shrub cover, closed-open, evergreen [12] Shrub cover, closed-open, deciduous [13] Herbaceous cover, closed-open [14] Sparse herbaceous or sparse shrub cover [15] Regularly flooded shrub and/or herbaceous cover [16] Cultivated and managed areas [17] Mosaic: cropland/tree cover/other natural veg. [18] Mosaic: cropland/shrub and/or grass cover [19] Bare areas [20] Water bodies [21] Snow and ice [22] Artificial surfaces and associated areas |
| ECOZONE | NALCMS Wland (%) | NALCMSWland-Treed (%) | EOSDRatio of Wland-Treed | NALCMS Ratio of Taiga NF/Total NF | CCI Homogeneity |
|---|---|---|---|---|---|
| EZ01_Atlantic_Highlands | 0.53 | 0.11 | 0.20 | 0.00 | 0.48 (MF) |
| EZ02_Atlantic_Maritime | 2.25 | 0.45 | 0.20 | 0.00 | 0.40 (NF) |
| EZ03_Boreal_Cordillera | 0.10 | 0.01 | 0.10 | 0.02 | 0.59 (NF) |
| EZ04_Boreal_Plains | 4.79 | 1.79 | 0.37 | 0.01 | 0.42 (NF) |
| EZ05_Boreal_Shield_South | 3.75 | 1.85 | 0.49 | 0.00 | 0.38 (mix) |
| EZ06_Boreal_Shield_Labrador | 2.27 | 0.38 | 0.17 | 0.01 | 0.74 (NF) |
| EZ07_Boreal_Shield_West | 11.06 | 4.47 | 0.40 | 0.06 | 0.68 (NF) |
| EZ08_Boreal_Shield_Newfoundland | 5.11 | 0.12 | 0.02 | 0.00 | 0.30 (shrub) |
| EZ09_Boreal_Shield_East | 0.90 | 0.07 | 0.08 | 0.01 | 0.64 (NF) |
| EZ10_Hudson_Plains | 37.17 | 18.31 | 0.49 | 0.43 | 0.38 (NF) |
| EZ11_Montane_Cordillera | 0.16 | 0.01 | 0.05 | 0.01 | 0.68 (NF) |
| EZ12_Prairies | 0.90 | 0.00 | 0.00 | 0.00 | 0.73 (crop) |
| EZ13_Southern_Arctic | 0.91 | 0.15 | 0.17 | 0.48 | 0.72 (sparse) |
| EZ14_Taiga_Cordillera | 0.53 | 0.05 | 0.10 | 0.07 | 0.30 (NF) |
| EZ15_Taiga_Plains_South | 6.14 | 2.11 | 0.34 | 0.21 | 0.56 (NF) |
| EZ16_Taiga_Plains_North | 2.03 | 0.21 | 0.10 | 0.49 | 0.55 (NF) |
| EZ17_Taiga_Shield_East | 0.86 | 0.14 | 0.16 | 0.15 | 0.53 (NF) |
| EZ18_Taiga_Shield_West | 4.92 | 1.26 | 0.26 | 0.31 | 0.42 (NF) |
| Common Legend | NALCMS/MODIS | EOSD | CCI | GLC2000 |
|---|---|---|---|---|
| 1. Needleleaf forest (NF) | 1,2 | 211,212,213 | 70,71,72,80,81,82 | 4,5 |
| 2. Broadleaf forest (BF) | 5 | 221,222,223 | 50,60,61,62 | 1,2,3 |
| 3. Mixed forest (MF) | 6 | 231,232,233 | 90 | 6 |
| 4. Mosaic forest/other | 100,110 | 9 | ||
| 5. Shrubs | 8 | 51,52 | 120,121,122 | 11,12,10 |
| 6. Grassland | 10 | 100,110 | 130 | 13 |
| 7. Sparse Veg | 11,12,13 | 40 | 140,150,151,152,153 | 14 |
| 8. Wetland | 14 | 81,82,83 | 160,170,180 | 7,8,15 |
| 9. Cropland | 15 | N/A | 10,11,12,20,30,40 | 16, 17, 18 |
| 10. Barren land | 16 | 32,33 | 200,201,202 | 19 |
| 11. Urban and built-up | 17 | 34 | 190 | 22 |
| 12. Water | 18 | 20 | 210 | 20 |
| 13. Snow and ice | 19 | 31 | 220 | 21 |
| ID | ESA-CCI Legend Description | NF | BF | Crop | Grass | Urban | Lake | Ocean | Bare |
|---|---|---|---|---|---|---|---|---|---|
| 10 | Cropland, rainfed (CR) | 1.0 | |||||||
| 11 | CR Herbaceous cover | 1.0 | |||||||
| 12 | CR Tree or shrub cover | 0.5 | 0.5 | ||||||
| 20 | Cropland, irrigated or post-flood | 1.0 | |||||||
| 30 | Mosaic cropland (>50%)/natural vegetation (tree, shrub, herb) | 0.05 | 0.2 | 0.6 | 0.15 | ||||
| 40 | Mosaic natural vegetation (tree, shrub, herb) >50%/crop | 0.075 | 0.275 | 0.4 | 0.25 | ||||
| 50 | Tree cover broadleaved evergreen closed to open | 1.0 | |||||||
| 60 | Tree cover broadleaved deciduous closed to open | 0.85 | 0.15 | ||||||
| 61 | Tree cover broadleaved deciduous closed | 0.85 | 0.15 | ||||||
| 62 | Tree cover broadleaved deciduous open | 0.55 | 0.35 | 0.1 | |||||
| 70 | Tree cover needleleaf evergreen closed to open | 0.75 | 0.1 | 0.15 | |||||
| 71 | Tree cover needleleaf evergreen, closed | 0.75 | 0.1 | 0.15 | |||||
| 72 | Tree cover needleleaf evergreen open | 0.35 | 0.05 | 0.3 | 0.3 | ||||
| 80 | Tree cover needleleaf deciduous closed to open | 0.75 | 0.1 | 0.15 | |||||
| 81 | Tree cover needleleaf deciduous closed | 0.75 | 0.1 | 0.15 | |||||
| 82 | Tree cover needleleaf deciduous open | 0.35 | 0.05 | 0.3 | 0.3 | ||||
| 90 | Tree cover Mixed | 0.35 | 0.4 | 0.15 | 0.1 | ||||
| 100 | Mosaic tree and shrub (>50%)/herbaceous cover (<50%) | 0.15 | 0.45 | 0.4 | |||||
| 110 | Mosaic herbaceous cover (>50%)/tree and shrub (<50%) | 0.1 | 0.3 | 0.6 | |||||
| 120 | Shrubland | 0.2 | 0.4 | 0.2 | 0.2 | ||||
| 121 | Shrubland evergreen | 0.3 | 0.3 | 0.2 | 0.2 | ||||
| 122 | Shrubland deciduous | 0.6 | 0.2 | 0.2 | |||||
| 130 | Grassland | 0.6 | 0.4 | ||||||
| 140 | Lichens and mosses | 0.6 | 0.4 | ||||||
| 150 | Sparse vegetation (tree, shrub, herb) <15% | 0.02 | 0.08 | 0.05 | 0.85 | ||||
| 151 | Sparse tree (<15%) | 0.02 | 0.08 | 0.05 | 0.85 | ||||
| 152 | Sparse shrub (<15%) | 0.02 | 0.08 | 0.05 | 0.85 | ||||
| 153 | Sparse herbaceous cover (<15%) | 0.15 | 0.85 | ||||||
| 160 | Tree cover, flooded fresh/brackish | 0.6 | 0.2 | 0.2 | |||||
| 170 | Tree cover, flooded saline water | 0.8 | 0.2 | ||||||
| 180 | Shrub or herbaceous cover, flooded | 0.15 | 0.15 | 0.4 | 0.15 | 0.15 | |||
| 190 | Urban areas | 0.025 | 0.025 | 0.15 | 0.75 | 0.05 | |||
| 200 | Bare areas | 1.0 | |||||||
| 201 | Consolidated bare areas | 1.0 | |||||||
| 202 | Unconsolidated bare areas | 1.0 | |||||||
| 210 | Water bodies | 1.0 | |||||||
| 220 | Permanent snow and ice | 1.0 |
| GLC2000 Legend Description | NF | BF | Crop | Grass | Urban | Lake | Ocean | Bare |
|---|---|---|---|---|---|---|---|---|
| 1 – Tree cover, broadleaved, evergreen | 1.0 | |||||||
| 2 – Tree cover, broadleaved, deciduous, closed | 1.0 | |||||||
| 3 – Tree cover, broadleaved, deciduous, open | 0.6 | 0.2 | 0.1 | 0.1 | ||||
| 4 – Tree cover, needleleaved, evergreen | 1.0 | |||||||
| 5 – Tree cover, needleleaved, deciduous | 0.8 | 0.1 | 0.1 | |||||
| 6 – Tree cover, mixed leaf type | 0.4 | 0.5 | 0.1 | |||||
| 7 – Tree cover, regularly flooded, fresh water | 0.5 | 0.5 | ||||||
| 8 – Tree cover, regularly flooded, saline water | 0.5 | 0.5 | ||||||
| 9 – Mosaic: tree cover/other natural vegetation | 0.6 | 0.2 | 0.2 | |||||
| 10 – Tree cover, burnt | 0.2 | 0.2 | 0.3 | 0.3 | ||||
| 11 – Shrub cover, closed-open, evergreen | 0.6 | 0.2 | 0.1 | 0.1 | ||||
| 12 – Shrub cover, closed-open, deciduous | 0.4 | 0.3 | 0.3 | |||||
| 13 – Herbaceous cover, closed-open | 0.7 | 0.3 | ||||||
| 14 – Sparse herbaceous or sparse shrub cover | 0.1 | 0.1 | 0.8 | |||||
| 15 – Regularly flooded shrub and/or herbaceous cover | 0.5 | 0.3 | 0.1 | 0.1 | ||||
| 16 – Cultivated and managed areas | 0.5 | 0.4 | 0.1 | |||||
| 17 – Mosaic: cropland/tree cover/other natural veg | 0.2 | 0.5 | 0.2 | 0.1 | ||||
| 18 – Mosaic: cropland/shrub and/or grass cover | 0.1 | 0.5 | 0.3 | 0.1 | ||||
| 19 – Bare areas | 1.0 | |||||||
| 20 – Water bodies | 1.0 | |||||||
| 21 – Snow and ice | 1.0 | |||||||
| 22 – Artificial surfaces and associated areas | 1.0 |
| (a) Ecozone | NALCMS | EOSD | Hansen | Number of Forest Samples |
| 3-Boreal Cordillera | 0.71 | 0.43 | 0.86 | 7 |
| 4-Boreal Plains | 0.91 | 0.77 | 0.94 | 35 |
| 7-Boreal Shield | 0.71 | 0.74 | 0.94 | 31 |
| 9-Boreal Shield | 1.00 | 0.73 | 0.82 | 11 |
| 10-Hudson Plains | 0.79 | 0.68 | 0.84 | 19 |
| 11-Montane Cordillera | 1.00 | 0.80 | 0.80 | 5 |
| 15-Taiga Plains | 0.89 | 0.67 | 0.67 | 9 |
| 17-Taiga Shield | 0.84 | 0.64 | 0.72 | 25 |
| 18-Taiga Shield | 0.69 | 0.69 | 0.62 | 13 |
| Mean/Total | 0.83 | 0.70 | 0.83 | 155 |
| (b) Ecozone | NALCMS | EOSD | Hansen | Number of Non-Forest Samples |
| 3-Boreal Cordillera | 0.95 | 1.00 | 0.84 | 19 |
| 4-Boreal Plains | 0.82 | 0.70 | 0.60 | 50 |
| 7-Boreal Shield | 0.88 | 0.67 | 0.33 | 24 |
| 9-Boreal Shield | 0.77 | 0.69 | 0.92 | 13 |
| 10-Hudson Plains | 0.93 | 0.57 | 0.57 | 14 |
| 11-Montane Cordillera | 0.87 | 0.67 | 0.87 | 15 |
| 15-Taiga Plains | 0.80 | 0.80 | 0.60 | 10 |
| 17-Taiga Shield | 0.81 | 0.81 | 0.84 | 31 |
| 18-Taiga Shield | 0.98 | 0.85 | 0.74 | 47 |
| Mean/Total | 0.87 | 0.76 | 0.69 | 223 |
| LC Class | NF | BF | MF | Mosaic | Shrub | Grass | Sparse | Wland | Crop | Barren | Urban | Water | Snow |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NALCMS2010 | 5.63 | 0.60 | 0.99 | 0.74 | 0.50 | 0.40 | 4.33 | 0.59 | 0.91 | 1.96 | 0.03 | 2.11 | 0.25 |
| EOSD2000 | 4.44 | 0.51 | 0.95 | 0.08 | 1.74 | 1.22 | |||||||
| MODIS2000 | 5.12 | 0.71 | 1.86 | 0.50 | 0.50 | 0.20 | 4.46 | 0.60 | 0.90 | 1.96 | 0.01 | 1.96 | 0.28 |
| MODIS2010 | 4.82 | 0.77 | 1.81 | 0.64 | 0.60 | 0.25 | 4.46 | 0.58 | 0.90 | 1.96 | 0.01 | 1.97 | 0.28 |
| CCI2000 | 6.73 | 0.42 | 0.80 | 0.58 | 0.58 | 0.43 | 5.67 | 0.39 | 0.92 | 0.37 | 0.01 | 1.96 | 0.20 |
| CCI2010 | 6.78 | 0.42 | 0.81 | 0.62 | 0.58 | 0.43 | 5.62 | 0.35 | 0.92 | 0.37 | 0.02 | 1.95 | 0.20 |
| GLC2000 | 4.31 | 0.35 | 1.16 | 1.87 | 1.33 | 0.23 | 6.09 | 0.06 | 0.78 | 0.00 | 0.01 | 2.18 | 0.68 |
| (a) | |||||||||||||
| CLASS | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 1 | 0.57 | 0.04 | 0.10 | 0.05 | 0.04 | 0.06 | 0.05 | 0.01 | 0.01 | 0.07 | |||
| 2 | 0.10 | 0.37 | 0.17 | 0.11 | 0.05 | 0.13 | 0.02 | 0.02 | 0.01 | 0.01 | 0.02 | ||
| 3 | 0.23 | 0.24 | 0.28 | 0.13 | 0.02 | 0.04 | 0.03 | 0.01 | 0.01 | 0.02 | |||
| 4 | 0.22 | 0.12 | 0.06 | 0.24 | 0.06 | 0.11 | 0.08 | 0.03 | 0.01 | 0.03 | 0.04 | ||
| 5 | 0.24 | 0.08 | 0.04 | 0.25 | 0.10 | 0.12 | 0.07 | 0.02 | 0.03 | 0.02 | 0.02 | ||
| 6 | 0.17 | 0.05 | 0.01 | 0.15 | 0.15 | 0.21 | 0.06 | 0.06 | 0.08 | 0.02 | 0.03 | ||
| 7 | 0.18 | 0.02 | 0.01 | 0.11 | 0.12 | 0.22 | 0.08 | 0.01 | 0.17 | 0.01 | 0.05 | 0.01 | |
| 8 | 0.35 | 0.07 | 0.07 | 0.12 | 0.04 | 0.06 | 0.16 | 0.01 | 0.01 | 0.01 | 0.08 | ||
| 9 | 0.06 | 0.15 | 0.05 | 0.17 | 0.08 | 0.01 | 0.37 | 0.04 | 0.05 | 0.01 | |||
| 10 | 0.10 | 0.06 | 0.03 | 0.07 | 0.12 | 0.15 | 0.04 | 0.01 | 0.26 | 0.04 | 0.07 | 0.01 | |
| 11 | 0.04 | 0.04 | 0.02 | 0.05 | 0.01 | 0.02 | 0.01 | 0.03 | 0.03 | 0.69 | 0.06 | ||
| 12 | 0.07 | 0.01 | 0.01 | 0.01 | 0.01 | 0.02 | 0.01 | 0.74 | |||||
| 13 | 0.01 | 0.31 | 0.67 | ||||||||||
| Max | 0.91 | 0.61 | 0.53 | 0.48 | 0.65 | 0.84 | 0.51 | 0.85 | 0.88 | 0.92 | 0.95 | 0.92 | |
| (b) | |||||||||||||
| CLASS | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 1 | 0.71 | 0.03 | 0.08 | 0.03 | 0.03 | 0.03 | 0.05 | 0.00 | 0.01 | 0.00 | 0.04 | ||
| 2 | 0.07 | 0.47 | 0.15 | 0.10 | 0.04 | 0.13 | 0.01 | 0.01 | 0.00 | 0.00 | 0.01 | ||
| 3 | 0.17 | 0.29 | 0.35 | 0.12 | 0.01 | 0.03 | 0.01 | 0.00 | 0.00 | 0.01 | 0.01 | ||
| 4 | 0.21 | 0.14 | 0.06 | 0.32 | 0.05 | 0.08 | 0.10 | 0.01 | 0.00 | 0.00 | 0.02 | 0.00 | |
| 5 | 0.14 | 0.07 | 0.03 | 0.39 | 0.09 | 0.15 | 0.06 | 0.03 | 0.03 | 0.00 | 0.01 | 0.00 | |
| 6 | 0.15 | 0.04 | 0.01 | 0.14 | 0.18 | 0.23 | 0.08 | 0.06 | 0.08 | 0.01 | 0.01 | 0.00 | |
| 7 | 0.14 | 0.00 | 0.00 | 0.08 | 0.13 | 0.26 | 0.07 | 0.01 | 0.22 | 0.02 | 0.07 | 0.01 | |
| 8 | 0.26 | 0.05 | 0.05 | 0.10 | 0.05 | 0.11 | 0.29 | 0.00 | 0.00 | 0.00 | 0.07 | ||
| 9 | 0.03 | 0.14 | 0.03 | 0.07 | 0.05 | 0.00 | 0.01 | 0.57 | 0.06 | 0.04 | 0.01 | 0.00 | |
| 10 | 0.06 | 0.04 | 0.01 | 0.07 | 0.14 | 0.15 | 0.03 | 0.00 | 0.35 | 0.04 | 0.05 | 0.02 | |
| 11 | 0.00 | 0.01 | 0.00 | 0.01 | 0.00 | 0.00 | 0.02 | 0.01 | 0.01 | 0.92 | 0.01 | ||
| 12 | 0.01 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.80 | |||
| 13 | 0.00 | 0.00 | 0.00 | 0.02 | 0.00 | 0.00 | 0.23 | 0.00 | 0.74 | ||||
| Frac | 0.55 | 0.29 | 0.28 | 0.1 | 0.31 | 0.54 | 0.21 | 0.79 | 0.24 | 0.23 | 0.43 | 0.41 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Bartlett, P.; Pouliot, D.; Chan, E.; Lamarche, C.; Wulder, M.A.; Defourny, P.; Brady, M. Comparison and Assessment of Regional and Global Land Cover Datasets for Use in CLASS over Canada. Remote Sens. 2019, 11, 2286. https://doi.org/10.3390/rs11192286
Wang L, Bartlett P, Pouliot D, Chan E, Lamarche C, Wulder MA, Defourny P, Brady M. Comparison and Assessment of Regional and Global Land Cover Datasets for Use in CLASS over Canada. Remote Sensing. 2019; 11(19):2286. https://doi.org/10.3390/rs11192286
Chicago/Turabian StyleWang, Libo, Paul Bartlett, Darren Pouliot, Ed Chan, Céline Lamarche, Michael A. Wulder, Pierre Defourny, and Mike Brady. 2019. "Comparison and Assessment of Regional and Global Land Cover Datasets for Use in CLASS over Canada" Remote Sensing 11, no. 19: 2286. https://doi.org/10.3390/rs11192286
APA StyleWang, L., Bartlett, P., Pouliot, D., Chan, E., Lamarche, C., Wulder, M. A., Defourny, P., & Brady, M. (2019). Comparison and Assessment of Regional and Global Land Cover Datasets for Use in CLASS over Canada. Remote Sensing, 11(19), 2286. https://doi.org/10.3390/rs11192286