Airborne Hyperspectral Imaging for Submerged Archaeological Mapping in Shallow Water Environments

 and
and
Abstract
1. Introduction
2. Materials and Methods
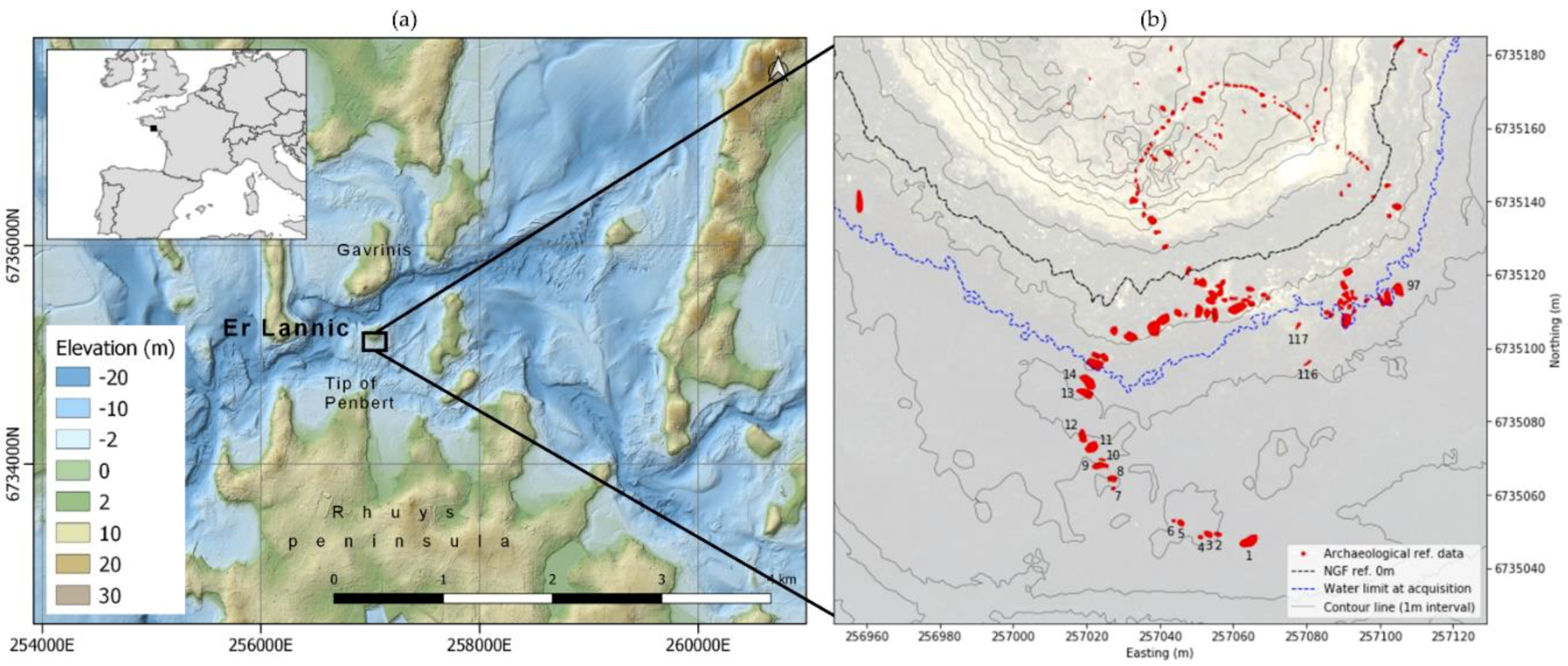
2.1. Study Area
2.2. Airborne Hyperspectral Data
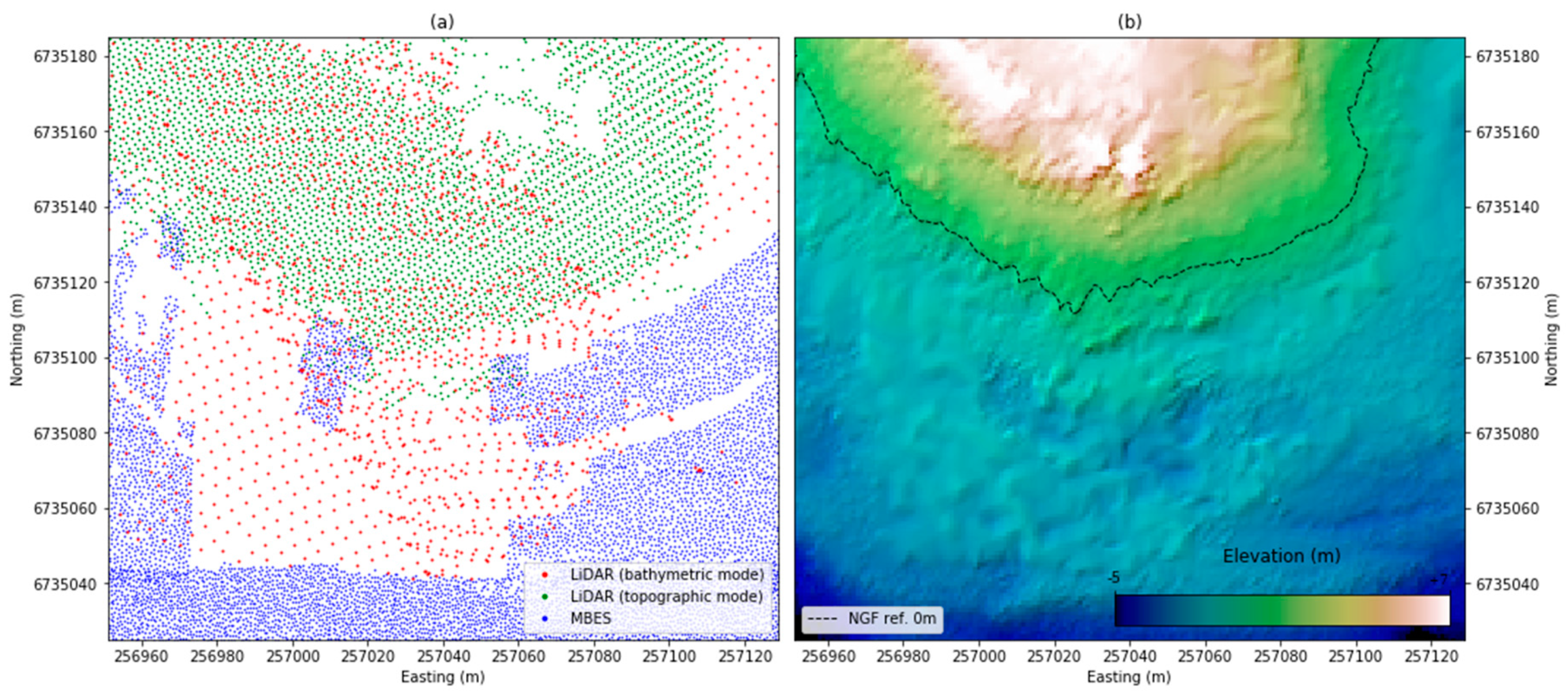
2.3. Bathymetric Reference Data
- ALB (SHOALS-1000T) by Shom (2005):
- ○
- Topographic and bathymetric modes: spot spacing 2 and 5 m, altitude 900 and 400 m, absolute planimetric accuracy < 1.5 and < 2.8 m, and absolute vertical accuracy < 0.3 and < 0.5 m, respectively
- MBES by Shom (2003) and IFREMER (2013)
2.4. Archaeological Reference Data
2.5. Dimensionality Reduction and Visualization
2.6. Unsupervised Anomaly Detection
2.7. Radiative Transfer Model over Shallow Water
3. Methodology
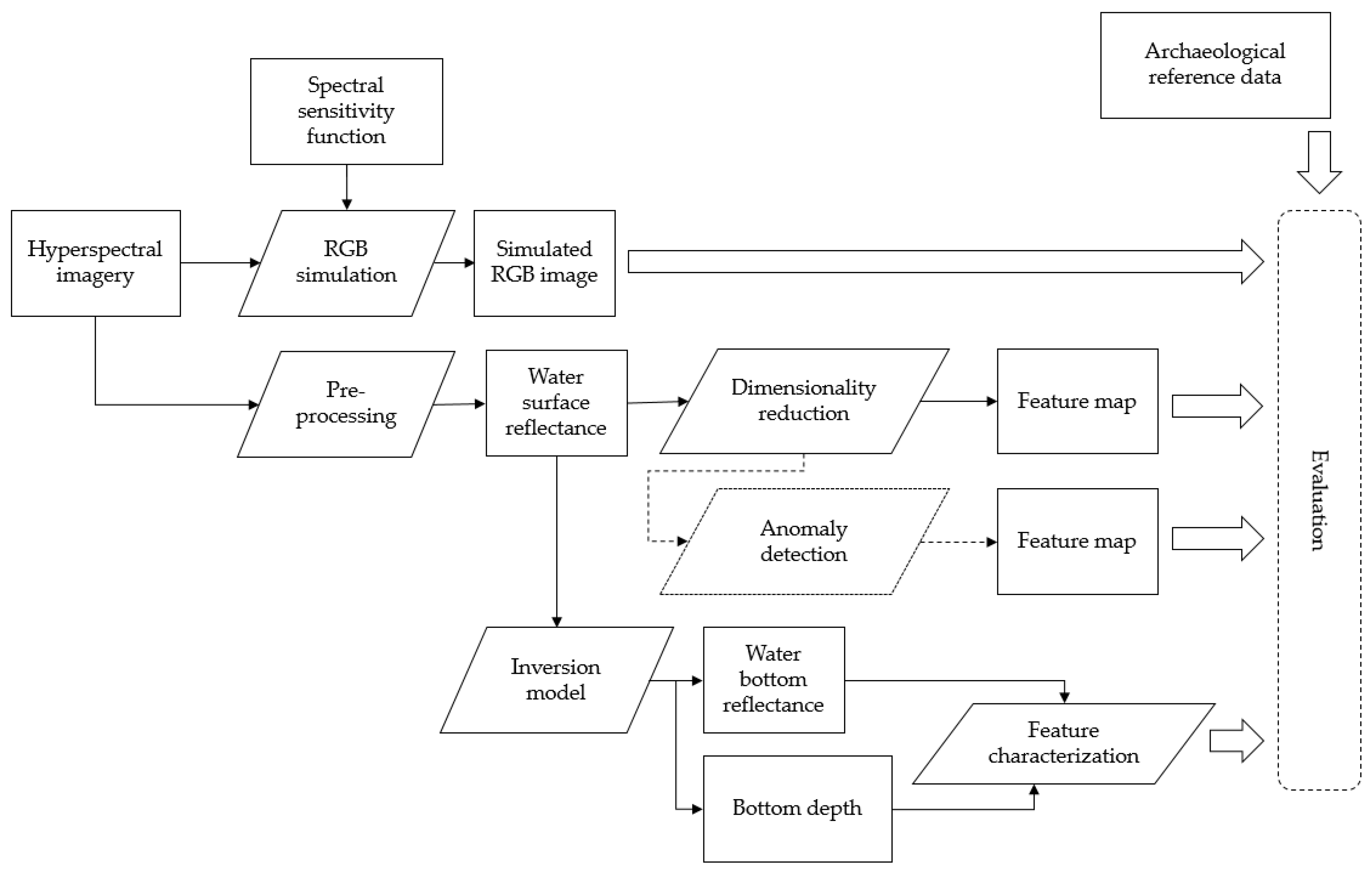
3.1. Workflow
3.2. Pre-processing
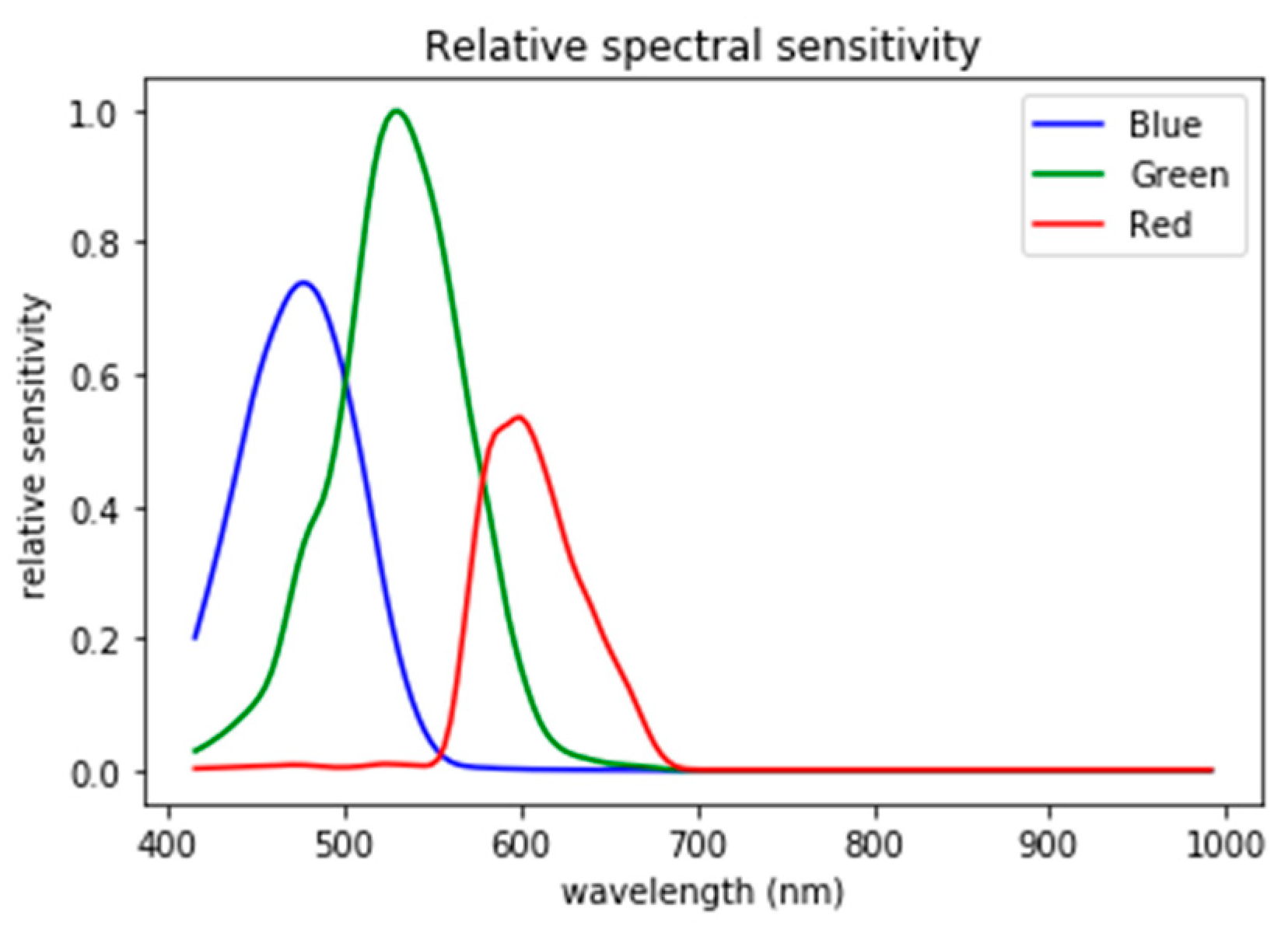
3.3. Simulation of True-color Image
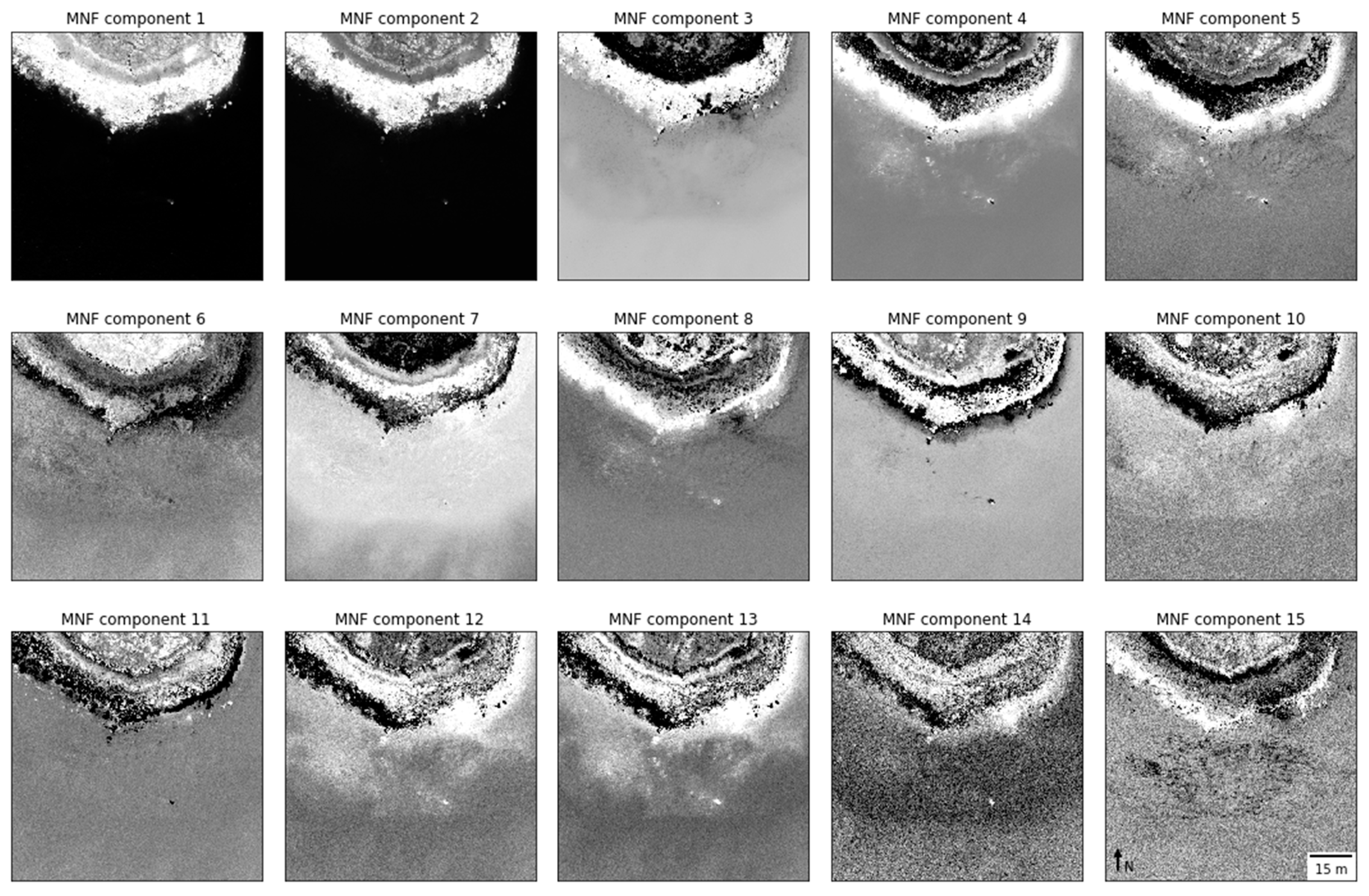
3.4. Dimensionality Reduction Using MNFMinimum Noise Fraction Transform
3.5. Automatic Anomaly Detection
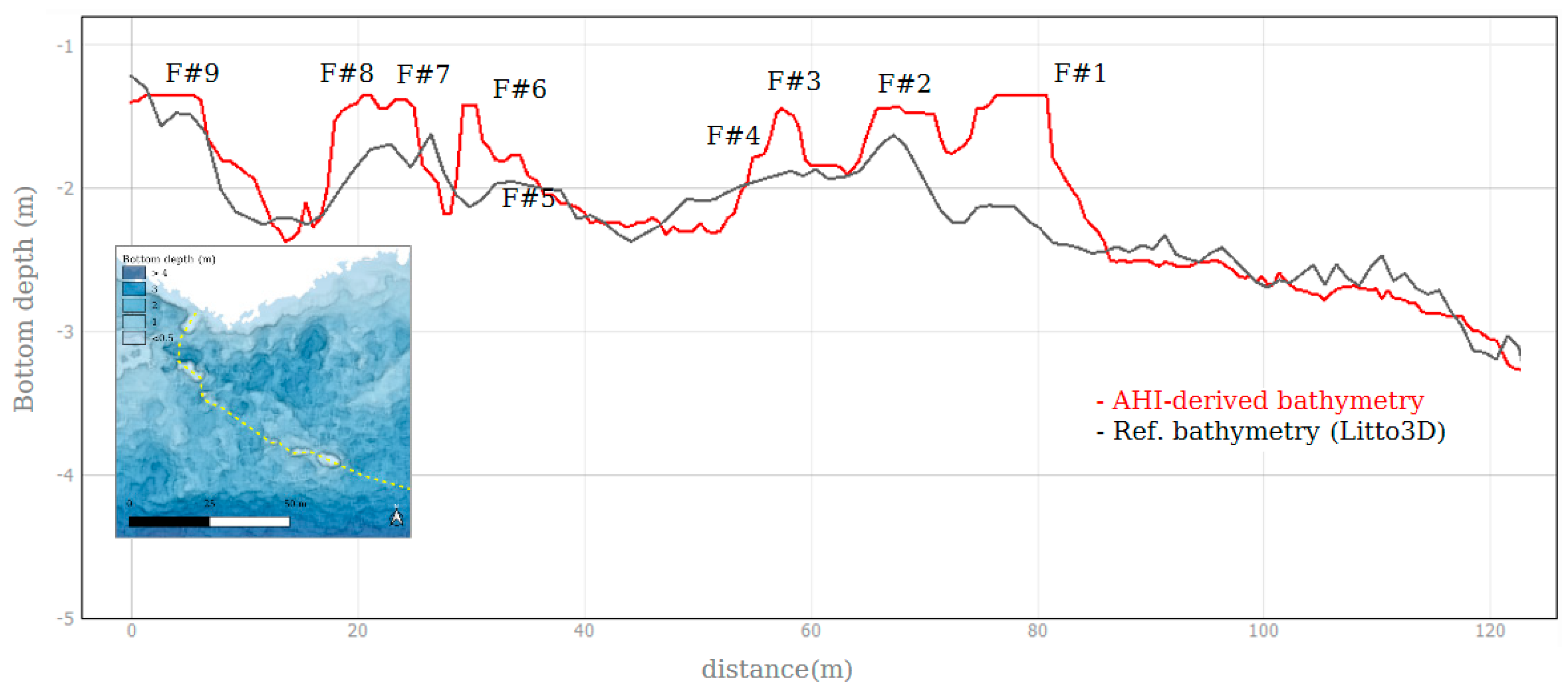
3.6. Depth and Bottom Reflectance Estimation
4. Results
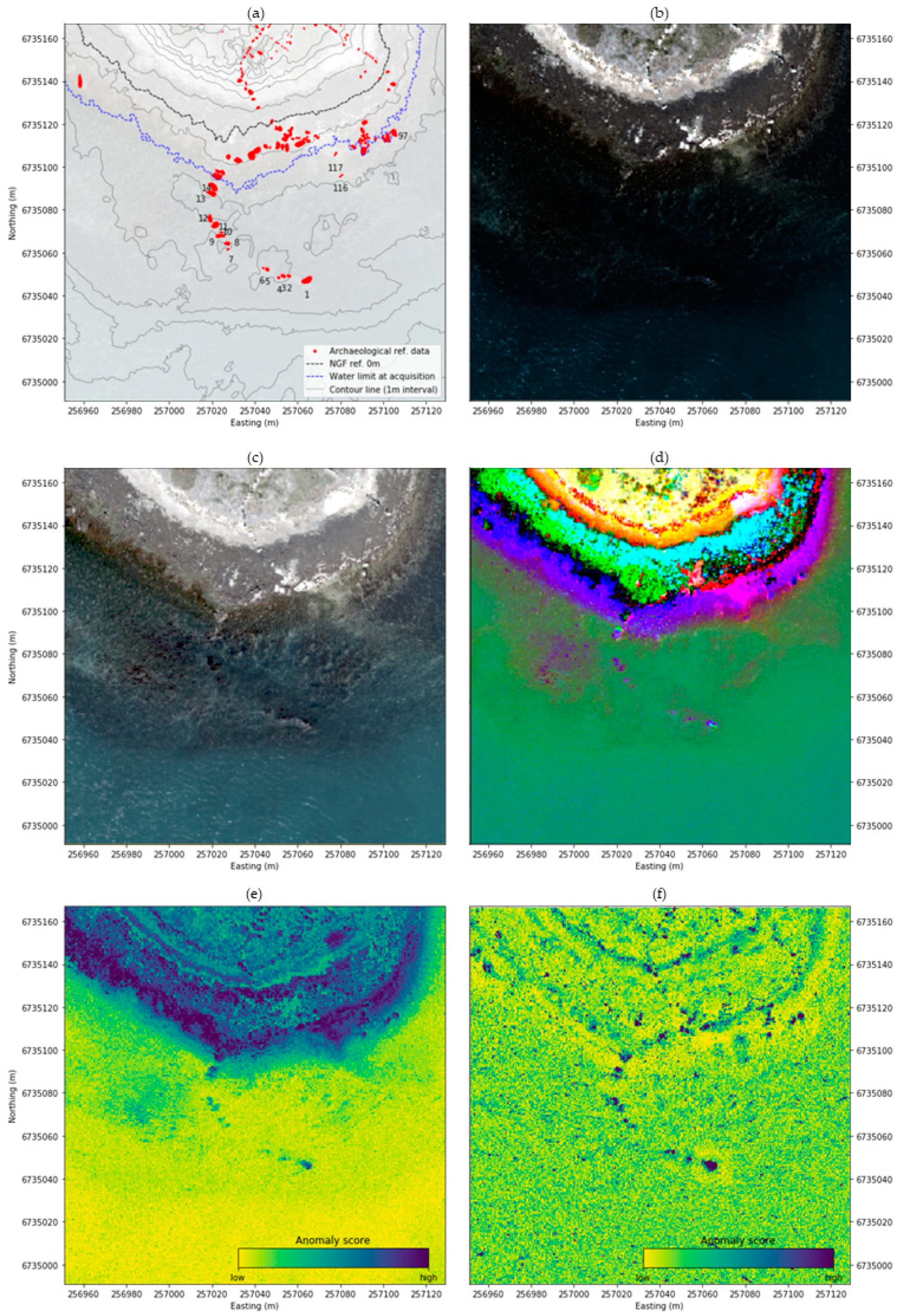
4.1. Analysis of the Simulated Rgb Image
4.2. Analysis of the Hyperspectral Imagery
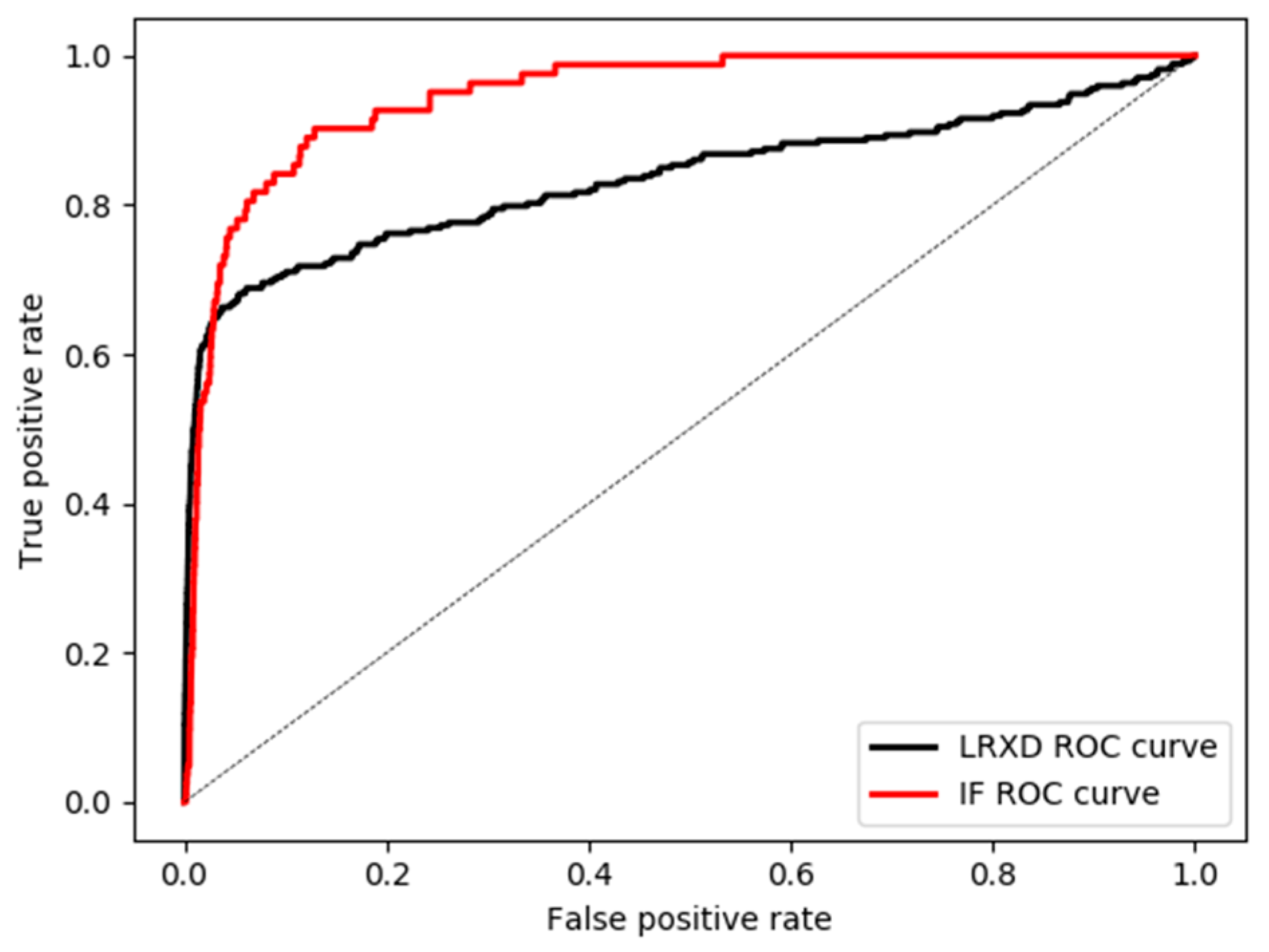
4.3. Automatic Detection of Archeological Structures
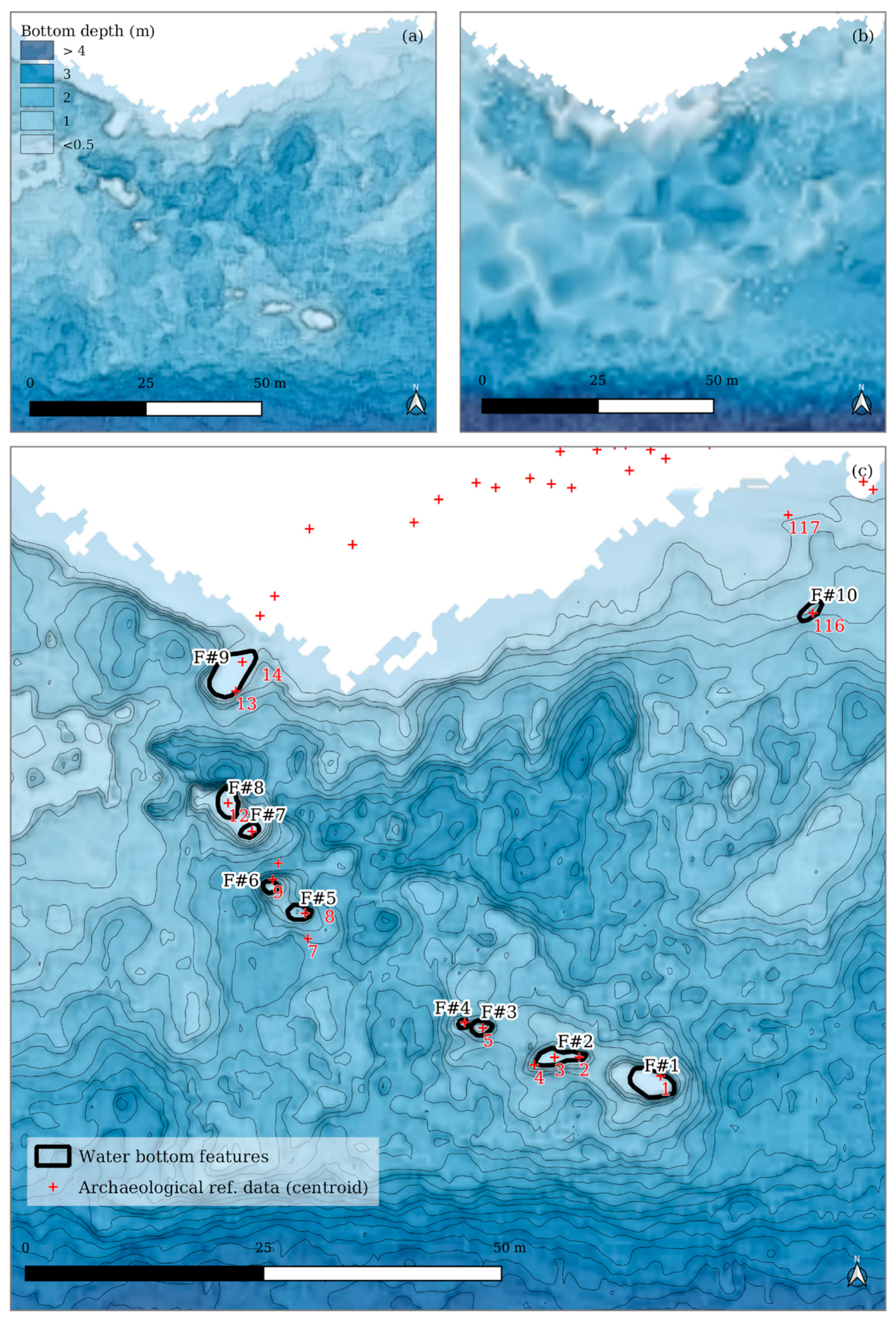
4.4. Characterization of Archeological Structures
4.4.1. Morphological Characterization
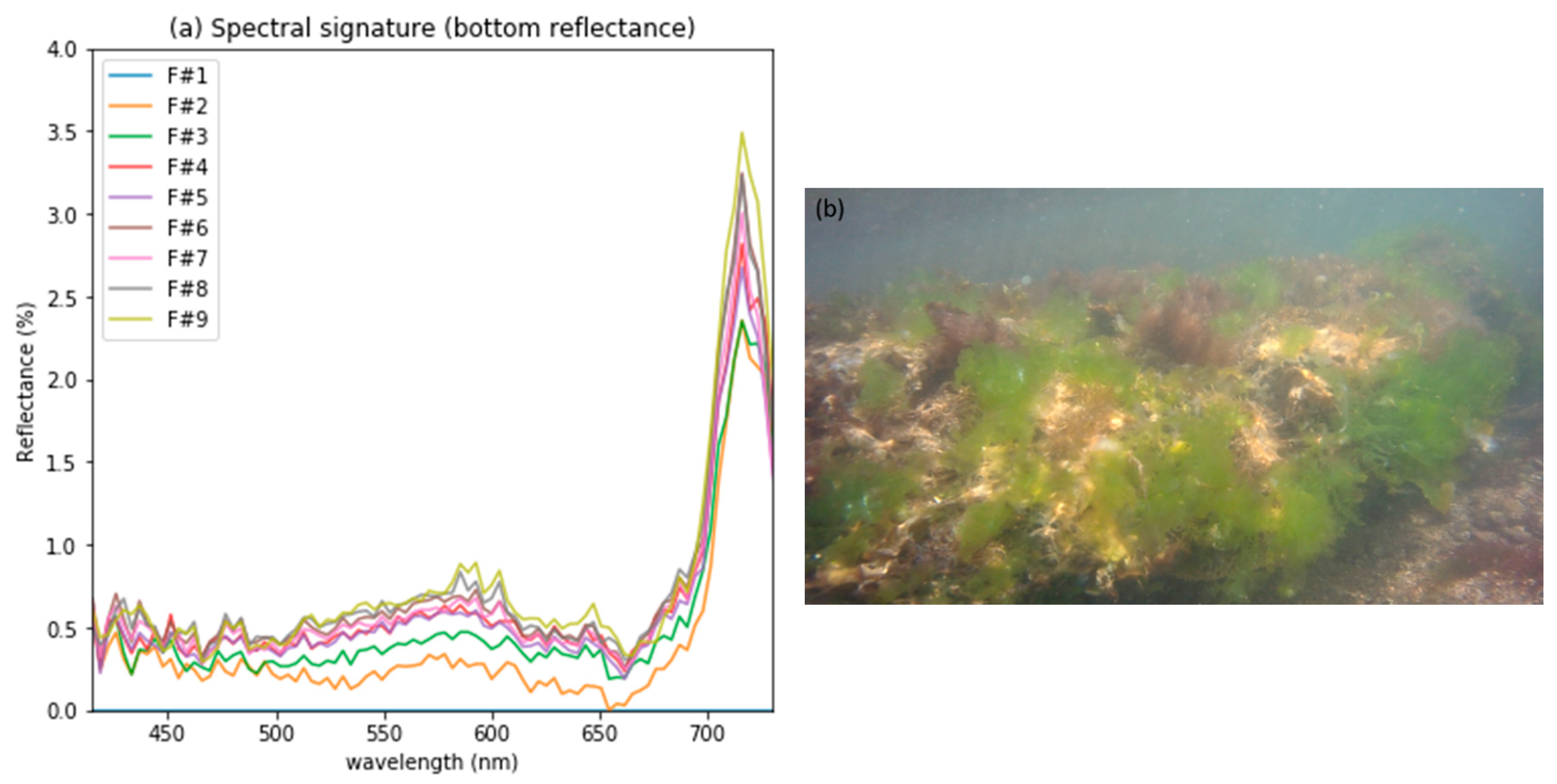
4.4.2. Spectral Characterization of the Archeological Structures
5. Discussion and Perspectives
5.1. AHI: Potential for Application to Underwater Archaeology
5.2. Data Uncertainty and Statistical Results
5.3. From Anomaly to Archaeological Structure
5.4. Perspectives and Future Research Directions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Daire, M.-Y.; López-Romero, E.; Proust, J.-N.; Regnauld, H.; Pian, S.; Shi, B. Coastal Changes and Cultural Heritage (1): Assessment of the Vulnerability of the Coastal Heritage in Western France. J. Isl. Coast. Archaeol. 2012, 7, 168–182. [Google Scholar] [CrossRef]
- Reeder-Myers, L.A. Cultural Heritage at Risk in the Twenty-First Century: A Vulnerability Assessment of Coastal Archaeological Sites in the United States. J. Isl. Coast. Archaeol. 2015, 10, 436–445. [Google Scholar] [CrossRef]
- Singh, H.; Adams, J.; Mindell, D.; Foley, B. Imaging Underwater for Archaeology. J. Field Archaeol. 2000, 27, 319–328. [Google Scholar]
- Guzinski, R.; Spondylis, E.; Michalis, M.; Tusa, S.; Brancato, G.; Minno, L.; Hansen, L.B. Exploring the Utility of Bathymetry Maps Derived with Multispectral Satellite Observations in the Field of Underwater Archaeology. Open Archaeol. 2016, 2. [Google Scholar] [CrossRef]
- Costa, E. The progress of survey techniques in underwater sites: the case study of cape stoba shipwreck. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 69–75. [Google Scholar] [CrossRef]
- Ruppe, C.V.; Barstad, J.F. International Handbook of Underwater Archaeology; Springer: New York, NY, USA, 2013; ISBN 978-1-4615-0535-8. [Google Scholar]
- Westley, K.; Plets, R.; Quinn, R.; Mcgonigle, C.; Sacchetti, F.; Dale, M.; McNeary, R.; Clements, A. Correction to: Optimising protocols for high-definition imaging of historic shipwrecks using multibeam echosounder. Archaeol. Anthr. Sci. 2019, 11, 3647–3648. [Google Scholar] [CrossRef]
- Harff, J.; Bailey, G.N.; Lüth, F. Geology and archaeology: Submerged landscapes of the continental shelf: An introduction. Geol. Soc. Lond. Spec. Publ. 2016, 411, 1–8. [Google Scholar] [CrossRef]
- Plets, R.; Quinn, R.; Forsythe, W.; Westley, K.; Bell, T.; Benetti, S.; McGrath, F.; Robinson, R. Using Multibeam Echo-Sounder Data to Identify Shipwreck Sites: Archaeological assessment of the Joint Irish Bathymetric Survey data: Using multibeam echo-sounder data to identify shipwreck sites. Int. J. Naut. Archaeol. 2011, 40, 87–98. [Google Scholar] [CrossRef]
- Xu, T.; Xu, L. Digital Underwater Acoustic Communications; Elsevier: Amsterdam, The Netherlands, 2017; ISBN 978-0-12-803009-7. [Google Scholar]
- Ødegård, Ø.; Mogstad, A.A.; Johnsen, G.; Sørensen, A.J.; Ludvigsen, M. Underwater hyperspectral imaging: A new tool for marine archaeology. Appl. Opt. 2018, 57, 3214–3223. [Google Scholar] [CrossRef]
- Doneus, M.; Doneus, N.; Briese, C.; Pregesbauer, M.; Mandlburger, G.; Verhoeven, G. Airborne laser bathymetry—Detecting and recording submerged archaeological sites from the air. J. Archaeol. Sci. 2013, 40, 2136–2151. [Google Scholar] [CrossRef]
- Shih, P.T.Y.; Chen, Y.H.; Chen, J.C. Historic Shipwreck Study in Dongsha Atoll with Bathymetric LiDAR. Archaeol. Prospect. 2014, 21, 139–146. [Google Scholar] [CrossRef]
- Doneus, M.; Miholjek, I.; Mandlburger, G.; Doneus, N.; Verhoeven, G.; Briese, C.; Pregesbauer, M. Airborne laser bathymetry for documentation of submerged archaeological sites in shallow water. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 99–107. [Google Scholar] [CrossRef]
- Bachmann, C.M.; Nichols, C.R.; Montes, M.J. Airborne Remote Sensing of Trafficability in the Coastal Zone. NRL Rev. 2009, 223–228. [Google Scholar]
- Yang, E.; LaRocque, P.; Guenther, G.; Reid, D.; Pan, W.; Francis, K. Shallow Water Depth Extraction—Progress and Challenges. In Proceedings of the US Hydrographic Conference, Norfolk, VA, USA, 14–17 May 2007; p. 13. [Google Scholar]
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A review. Wetl. Ecol. Manag. 2010, 18, 281–296. [Google Scholar] [CrossRef]
- Roessner, S.; Segl, K.; Heiden, U.; Kaufmann, H. Automated differentiation of urban surfaces based on airborne hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1525–1532. [Google Scholar] [CrossRef]
- Manolakis, D.; Marden, D.; Shaw, G.A. Hyperspectral Image Processing for Automatic Target Detection Applications. Linc. Lab. J. 2003, 14, 79–116. [Google Scholar]
- Van Der Meer, F.D.; Van Der Werff, H.M.; Van Ruitenbeek, F.J.; Hecker, C.A.; Bakker, W.H.; Noomen, M.F.; Van Der Meijde, M.; Carranza, E.J.M.; De Smeth, J.B.; Woldai, T.; et al. Multi- and hyperspectral geologic remote sensing: A review. Int. J. Appl. Earth Obs. Geoinf. 2012, 14, 112–128. [Google Scholar] [CrossRef]
- Dekker, A.G.; Phinn, S.R.; Anstee, J.; Bissett, P.; Brando, V.E.; Casey, B.; Fearns, P.; Hedley, J.; Klonowski, W.; Lee, Z.P.; et al. Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments: Intercomparison of shallow water mapping methods. Limnol. Oceanogr. Methods 2011, 9, 396–425. [Google Scholar] [CrossRef]
- Doneus, M.; Verhoeven, G.; Atzberger, C.; Wess, M.; Ruš, M. New ways to extract archaeological information from hyperspectral pixels. J. Archaeol. Sci. 2014, 52, 84–96. [Google Scholar] [CrossRef]
- Savage, S.H.; Levy, T.E.; Jones, I.W. Prospects and problems in the use of hyperspectral imagery for archaeological remote sensing: A case study from the Faynan copper mining district, Jordan. J. Archaeol. Sci. 2012, 39, 407–420. [Google Scholar] [CrossRef]
- Cavalli, R.M.; Licciardi, G.A.; Chanussot, J. Detection of Anomalies Produced by Buried Archaeological Structures Using Nonlinear Principal Component Analysis Applied to Airborne Hyperspectral Image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 659–669. [Google Scholar] [CrossRef]
- Aqdus, S.A.; Hanson, W.S.; Drummond, J. The potential of hyperspectral and multi-spectral imagery to enhance archaeological cropmark detection: A comparative study. J. Archaeol. Sci. 2012, 39, 1915–1924. [Google Scholar] [CrossRef]
- Cavalli, R.M.; Colosi, F.; Palombo, A.; Pignatti, S.; Poscolieri, M. Remote hyperspectral imagery as a support to archaeological prospection. J. Cult. Herit. 2007, 8, 272–283. [Google Scholar] [CrossRef]
- Emmolo, D.; Franco, V.; Brutto, M.L.; Orlando, P.; Villa, B. Hyperspectral Techniques and GIS for Archaeological Investigation. In Proceedings of the ISPRS, Istanbul, Turkey, 12–23 July 2004. [Google Scholar]
- Cerra, D.; Agapiou, A.; Cavalli, R.M.; Sarris, A. An Objective Assessment of Hyperspectral Indicators for the Detection of Buried Archaeological Relics. Remote Sens. 2018, 10, 500. [Google Scholar] [CrossRef]
- Verhoeven, G.J. Are We There Yet? A Review and Assessment of Archaeological Passive Airborne Optical Imaging Approaches in the Light of Landscape Archaeology. Geoscience 2017, 7, 86. [Google Scholar] [CrossRef]
- Traviglia, A. MIVIS Hyperspectral Sensors for the Detection and GIS Supported Interpretation of Subsoil Archaeological Sites. In Proceedings of the 34th Conference on Digital Discovery: Exploring New Frontiers in Human Heritage, CAA, Fargo, ND, USA, 18–22 April 2006. [Google Scholar]
- Traviglia, A. Archaeological usability of hyperspectral images: Successes and failures of image processing techniques. BAR Int. Ser. 2006, 1568, 123. [Google Scholar]
- Baltzer, A.; Cassen, S.; Walter-Simonnet, A.V.; Clouet, H.; Lorin, A.; Tessier, B. Variations du niveau marin Holocène en Baie de Quiberon (Bretagne sud): Marqueurs archéologiques et sédimentologiques. Quaternaire 2015, 26, 105–115. [Google Scholar] [CrossRef]
- De Closmadeuc, G. Découverte d’un cromlec’h dans l’île d’El Lanic (Morbihan). Bull. Société Polymath. Morbihan 1867, 28–30. [Google Scholar]
- De Closmadeuc, G. Le cromlech d’Er Lanic et le Golfe du Morbihan à l’époque dite Celtique. Bulletin et Mémoires de la Société Polymathique du Morbihan 1882, 8–24. [Google Scholar]
- Gouezin, P. Le Site Mégalithique d’Er Lannic; Rapport Scientifique: Arzon, France, 1991. [Google Scholar]
- Pastol†, Y. Use of Airborne LIDAR Bathymetry for Coastal Hydrographic Surveying: The French Experience. J. Coast. Res. 2011, 62, 6–18. [Google Scholar] [CrossRef]
- Litto3D Terre Mer Altimétrie Bathymétrie Interface Terre-Mer Levé Lidar. Available online: https://diffusion.shom.fr/pro/risques/l3d-mar-morbihan-2015.html (accessed on 21 June 2019).
- Cassen, S. Corpus des Signes Gravés Néolithiques; Programme Collectif de Recherche; Université de Nantes: Nantes, France, 2018. [Google Scholar]
- Cassen, S.; Grimaud, V.; Boujot, C.; Chaigneau, C.; Collado, E.; De Jersey, P.; Querré, G.; Vigier, E.; Vourc’h, M. Quelques résultats 2018 du PCR “Corpus des Signes Gravés Néolithiques en Bretagne”; Journées du CReaAH: Rennes, France, 2019; pp. 16–17. [Google Scholar]
- Cassen, S.; Grimaud, V.; Obeltz, C. Architectures monumentales néolithiques submergées en Morbihan. Nouv. Archéologie 2019, 156, 60–64. [Google Scholar]
- Green, A.; Berman, M.; Switzer, P.; Craig, M. A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74. [Google Scholar] [CrossRef]
- Reed, I.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Liu, F.T.; Ting, K.M.; Zhou, Z.H. Isolation Forest. In Proceedings of the Eighth IEEE International Conference on Data Mining, Pisa, Italy, 15–19 December 2008; pp. 413–422. [Google Scholar]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters. 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- Sicot, G.; Lennon, M.; Corman, D.; Gauthiez, F. Estimation of the Sea Bottom Spectral Reflectance in Shallow Water with Hyperspectral Data. In Proceedings of the International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 2311–2314. [Google Scholar]
- Zhao, H. Spectral Sensitivity Database. Available online: https://nae-lab.org/~rei/research/cs/zhao/database.html (accessed on 19 June 2019).
- Zhao, H.; Kawakami, R.; Tan, R.T.; Ikeuchi, K. Estimating Basis Functions for Spectral Sensitivity of Digital Cameras. In Proceedings of the Meeting on Image Recognition and Understanding, Miami, FL, USA, 20–25 June 2009; Volume 2009. [Google Scholar]
- Maini, R.; Aggarwal, H. A Comprehensive Review of Image Enhancement Techniques. arXiv 2010, arXiv:10034053. [Google Scholar]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Lennon, M.; Sicot, G.; Thomas, N.; Smet, S.; Taillandier, C.; Corman, D.; Watremez, P.; Gauthiez, F. SWIM: Un Outil de Cartographie de la Zone de Petits Fonds à Partir de Données de Télédétection Optique Colloque Carhamb’ar, Cartographie des Habitats Marins Benthiques: De l’acquisition à la Restitution, Brest, 26–28 Mars 2013. In Proceedings of the Cartographie des Habitats Marins Benthiques: De L’acquisition à La Restitution, Brest, France, 26–28 March 2013; pp. 42–46. [Google Scholar]
- Lecours, V.; Dolan, M.F.J.; Micallef, A.; Lucieer, V.L. A review of marine geomorphometry, the quantitative study of the seafloor. Hydrol. Earth Syst. Sci. 2016, 20, 3207–3244. [Google Scholar] [CrossRef]
- Bajjouk, T.; Mouquet, P.; Ropert, M.; Quod, J.P.; Hoarau, L.; Bigot, L.; Le Dantec, N.; Delacourt, C.; Populus, J. Detection of changes in shallow coral reefs status: Towards a spatial approach using hyperspectral and multispectral data. Ecol. Indic. 2019, 96, 174–191. [Google Scholar] [CrossRef]
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. Earth Environ. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Göritz, A.; Berger, S.A.; Gege, P.; Grossart, H.-P.; Nejstgaard, J.C.; Riedel, S.; Röttgers, R.; Utschig, C. Retrieval of Water Constituents from Hyperspectral In-Situ Measurements under Variable Cloud Cover—A Case Study at Lake Stechlin (Germany). Remote Sens. 2018, 10, 181. [Google Scholar] [CrossRef]
- Pan, Z.; Glennie, C.; Fernandez-Diaz, J.C.; Starek, M. Comparison of bathymetry and seagrass mapping with hyperspectral imagery and airborne bathymetric lidar in a shallow estuarine environment. Int. J. Remote Sens. 2016, 37, 516–536. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spectral Range | Spatial Pixels | Spectral Resolution | Spectral Sampling | Number of Bands | FOV across Track | Pixel FOV across/Along Track | Coding |
|---|---|---|---|---|---|---|---|
| 0.4–1.0 µm | 1600 | 4.5 FWHM | 3.7 nm | 160 | 17° | 0.18 mrad/0.36 mrad | 12 bits |
| Flight Altitude | Ground Sampling Distance | Swath | Integration Time | Viewing Angle | Solar Zenith Angle |
|---|---|---|---|---|---|
| 1200 m | 50 cm | 176 m | 10.1 ms | 16.75° | 16.75° |
| Predicted Label “Standard” | Predicted Label “Anomaly” | |
|---|---|---|
| True label “standard” | 0.92 (IF) 0.84 (LRXD) | 0.08 (IF) 0.16 (LRXD) |
| True label ”anomaly” | 0.12 (IF) 0.27 (LRXD) | 0.88 (IF) 0.73 (LRXD) |
| Feature ID | Feature Area (m2) | Stele IDs | Stele Area (m2) |
|---|---|---|---|
| 1 | 10.3 | 9.8 | |
| 2 | 5.8 | , , | 4.7 (1.4, 2.4, 0.9) |
| 3 | 2.5 | 2.1 | |
| 4 | 0.7 | 0.5 | |
| 5 | 4.0 | 9.0 | |
| 6 | 1.5 | 4.8 | |
| 7 | 2.0 | 6.9 | |
| 8 | 5.1 | 4.7 | |
| 9 | 15.1 | 16.1 (6.9, 9.2) | |
| 10 | 2.8 | 0.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guyot, A.; Lennon, M.; Thomas, N.; Gueguen, S.; Petit, T.; Lorho, T.; Cassen, S.; Hubert-Moy, L. Airborne Hyperspectral Imaging for Submerged Archaeological Mapping in Shallow Water Environments. Remote Sens. 2019, 11, 2237. https://doi.org/10.3390/rs11192237
Guyot A, Lennon M, Thomas N, Gueguen S, Petit T, Lorho T, Cassen S, Hubert-Moy L. Airborne Hyperspectral Imaging for Submerged Archaeological Mapping in Shallow Water Environments. Remote Sensing. 2019; 11(19):2237. https://doi.org/10.3390/rs11192237
Chicago/Turabian StyleGuyot, Alexandre, Marc Lennon, Nicolas Thomas, Simon Gueguen, Tristan Petit, Thierry Lorho, Serge Cassen, and Laurence Hubert-Moy. 2019. "Airborne Hyperspectral Imaging for Submerged Archaeological Mapping in Shallow Water Environments" Remote Sensing 11, no. 19: 2237. https://doi.org/10.3390/rs11192237
APA StyleGuyot, A., Lennon, M., Thomas, N., Gueguen, S., Petit, T., Lorho, T., Cassen, S., & Hubert-Moy, L. (2019). Airborne Hyperspectral Imaging for Submerged Archaeological Mapping in Shallow Water Environments. Remote Sensing, 11(19), 2237. https://doi.org/10.3390/rs11192237