1. Introduction
The Great Barrier Reef and Coral Sea include 10 percent of the world’s reef ecosystems with more than 3000 coral reefs and 600 continental islands [
1]. Due to bioenvironmental concerns about this marine conservation zone, an accurate knowledge of the hydrodynamics is a priority [
2,
3]. Tides cause tidal currents and variations in sea levels, which are considered as the major contributor to ocean hydrodynamics in the GBR [
4]. Considerable fluctuations in bottom topography due to numerous continental islands and the existence of coral reefs lead to the tidal regime of the area being complicated [
5,
6,
7]. There were many studies that have attempted to analyse tides over this region in northern and central GBR, as well as in Broad Sound [
8,
9,
10,
11,
12].
Purely empirical tidal models, in which sea level observations from satellite altimetry and coastal tide-gauges are used, are not efficient in capturing the tidal complexity of this area [
13]. This is mainly due to the lower spatial resolution of sea level observations and neglect of complexity of the bottom topography [
14,
15]. In addition, pure hydrodynamic models, in which conservations of mass and momentum are used to develop shallow water equations, are not of acceptable performance over this zone [
14]. This is because these models are highly reliant on the uncertainties of bathymetry and bottom friction [
15,
16]. Inaccurate initial inputs lead to the development of an inefficient tidal model, this implies that modelling by just applying the conceptual equations cannot represent all details of tidal phenomena [
17].
The assimilation approach improves the tidal model outputs by constraining tidal shallow water equations using empirical observations, which is an effective method to develop accurate tidal models over coastal zones [
18,
19]. Models such as HAMTIDE [
20], FES2014 [
21], FES2012 [
22] and TPXO9 [
23] have confirmed the capability of assimilation approaches in improving outcomes of the hydrodynamic models.
Due to complex bathymetry, knowing the exact bottom topography is crucial to study the dynamics of the area including the mixing patterns, ocean tides, current flow and surface circulations [
24]. Therefore, an accurate bathymetry model is the main precursor to develop a new tidal model for coastal zones [
25]. In this regard we use a high-resolution bathymetry model (3.6″ × 3.6″), named gbr100, in developing a new tidal model for the GBR and Coral Sea in this study. The gbr100 covers the entire GBR and Coral Sea region [
24].
In addition, previous studies have shown that in contrast to a sand type of sea floor, over coral reefs, such as the GBR, drag coefficients and bottom friction fluctuate noticeably [
26]. As such, detailed information about the variations of bottom drag coefficients will contribute to better understanding of tidal behaviour in this area. Such information is now available from a recent hydrodynamic model by [
27]. Furthermore, long-term datasets are available for this region from multi-satellite altimetry missions, coastal tide gauges, current meters (mooring) and shipborne Acoustic Doppler Current Profiler (SBADCP).
In this study, the Oregon State University Tidal Inversion Software (OTIS) by [
28] is used to assimilate empirical observations into hydrodynamic equations in the GBR and Coral Sea. All available data and dynamics can be combined using the OTIS software tool to develop a new tidal model. This software uses a representer method [
28] to assimilate available tidal data into shallow water equations. In this software a set of programs efficiently conduct representer calculation, generate efficient grids, prior model covariance, boundary conditions and implement tidal data inversion [
29]. Compared to other assimilation algorithms, OTIS benefits from further simplifications, which facilitate tidal assimilation modelling over large scales but with limited computation expenses. In addition, further updates of this software provide users with capability of using sea surface current data from moorings and ship borne ADCPs [
30].
The new tidal model for the GBR and Coral Sea developed in this study is named as the UoNGBR model. The resultant model has a spatial resolution of 2′ × 2′. It uses the most recent bathymetry model for the study area and addresses what role the reef plays in tidal behaviour of the region by accounting for variations of the drag coefficient over reef and non-reef areas. It includes 37 tidal constituents of major and shallow water types: M2, S2, K1, P1, N2, O1, Q1, S1, K2, 2N2, eps2, J1, L2, La2, R2, T2, M3, M4, M6, M8, MKS2, MK3, MN4, MS4, Mu2, Nu2, S4, N4, OO1, SO1, Mf, Mm, Sa, Ssa, Msf, Msqm and Mtm.
The remainder of the paper is structured as follows. The study area and datasets are described in
Section 2. A description of implementing the model is presented in
Section 3. In
Section 4 sensitivity analysis of the contribution of bathymetry and drag coefficient data to the new model in the study area is discussed. The results, validations, conclusions and further discussions are presented in
Section 5 and
Section 6.
5. Results
From results shown in the sensitivity analysis in
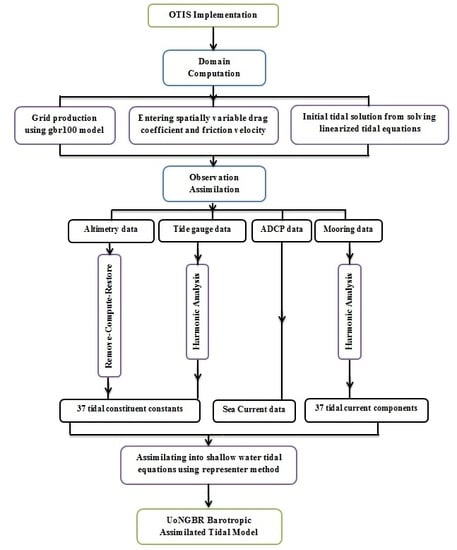
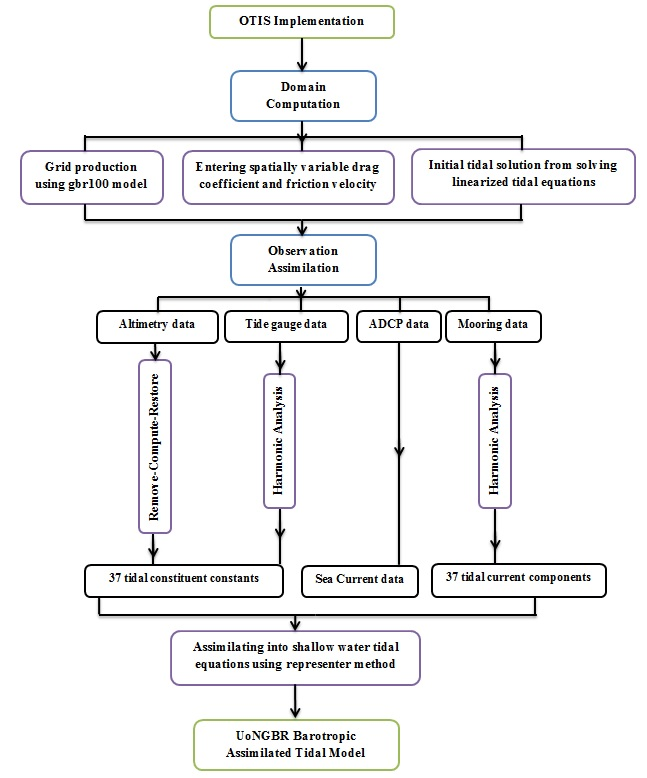
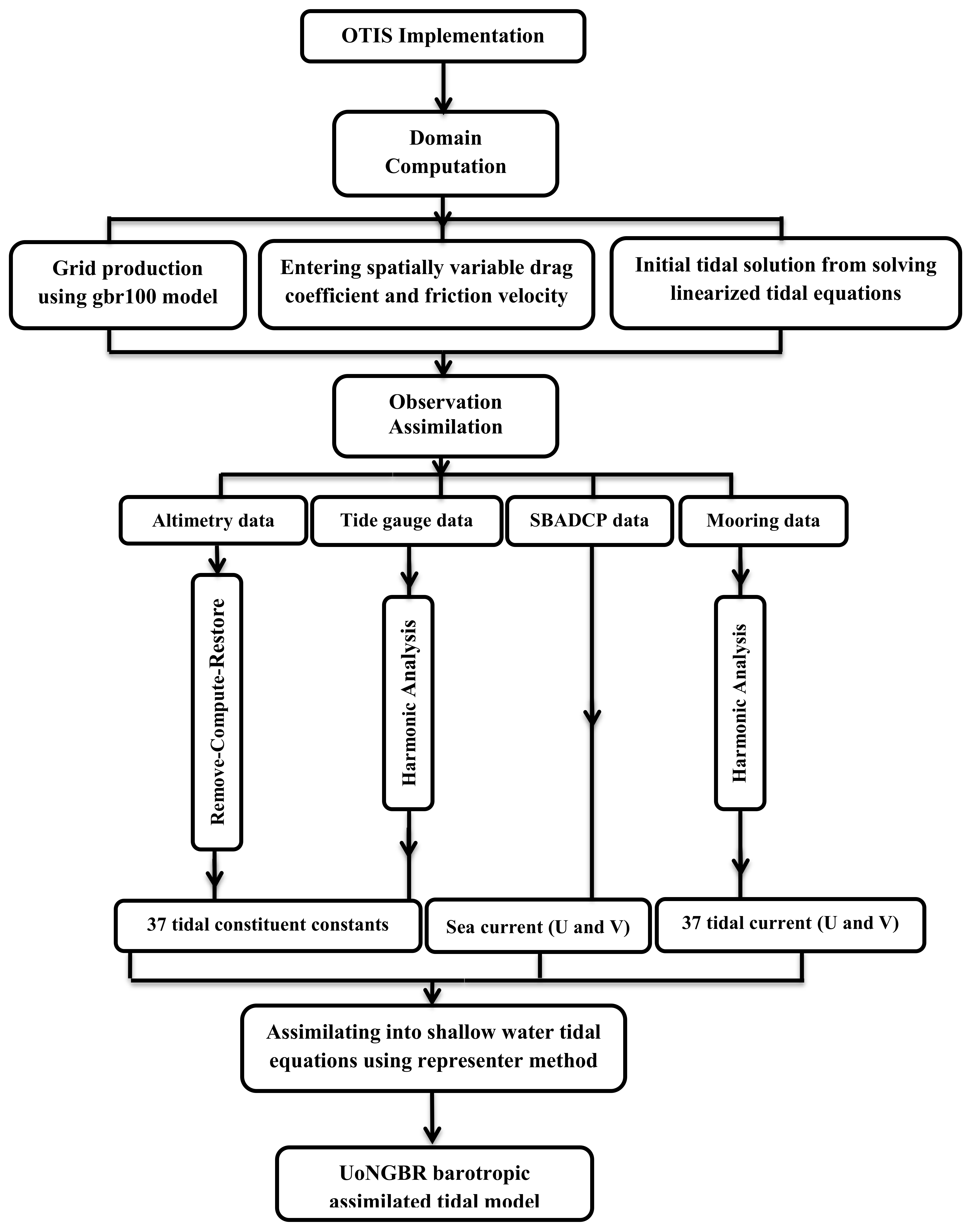
Section 4, it can be seen that over the GBR and Coral Sea, in particular over coastal and shelf zones, the high-resolution bathymetry and non-constant drag coefficient have to be considered. Followed the flowchart (
Figure 4) and using the OTIS software, our assimilative tidal model UoNGBR was, thus, generated by the datasets from more than 25 years of satellite altimetry, coastal tide gauges, mooring and ship-born ADCP data, bathymetry model gbr100 and spatially varying drag coefficient values based on the GBR1 Hydrodynamics Model [
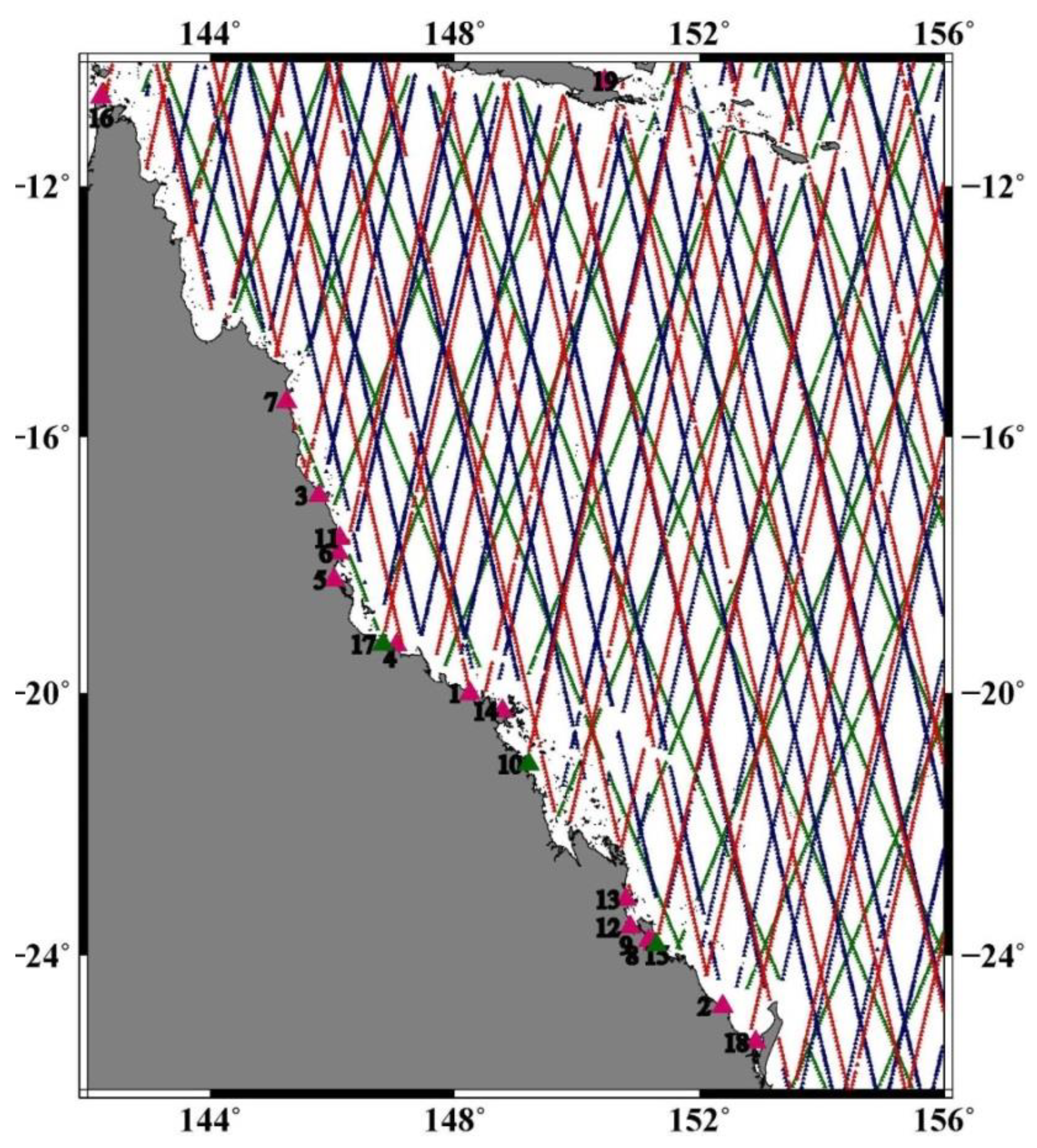
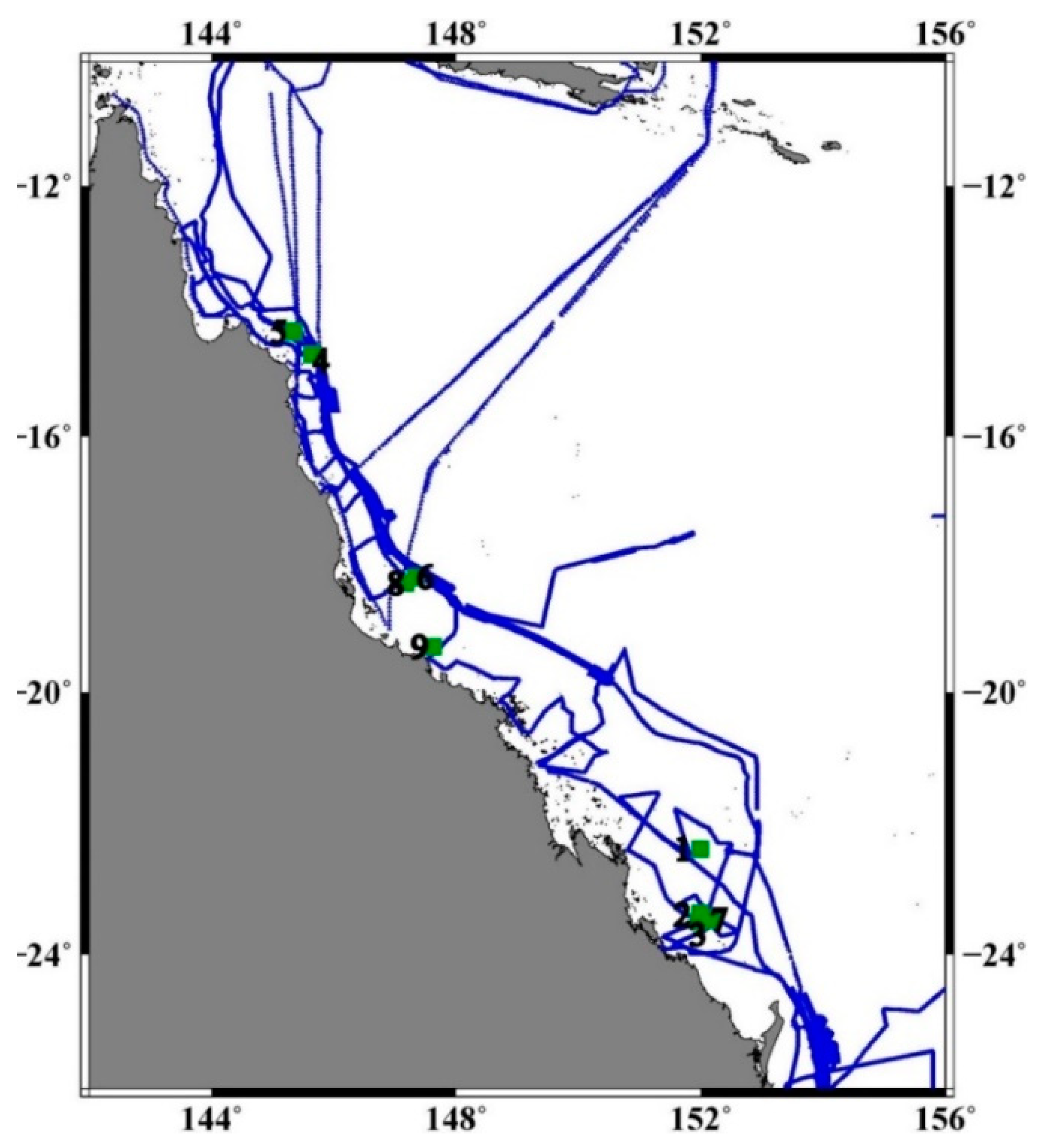
27]. In order to evaluate the efficiency of the UoNGBR model, coastal tide gauges and Sentinel-3A SLAts were used (cf.
Figure 2). The results and performance of the UoNGBR model over the study area are discussed in this section.
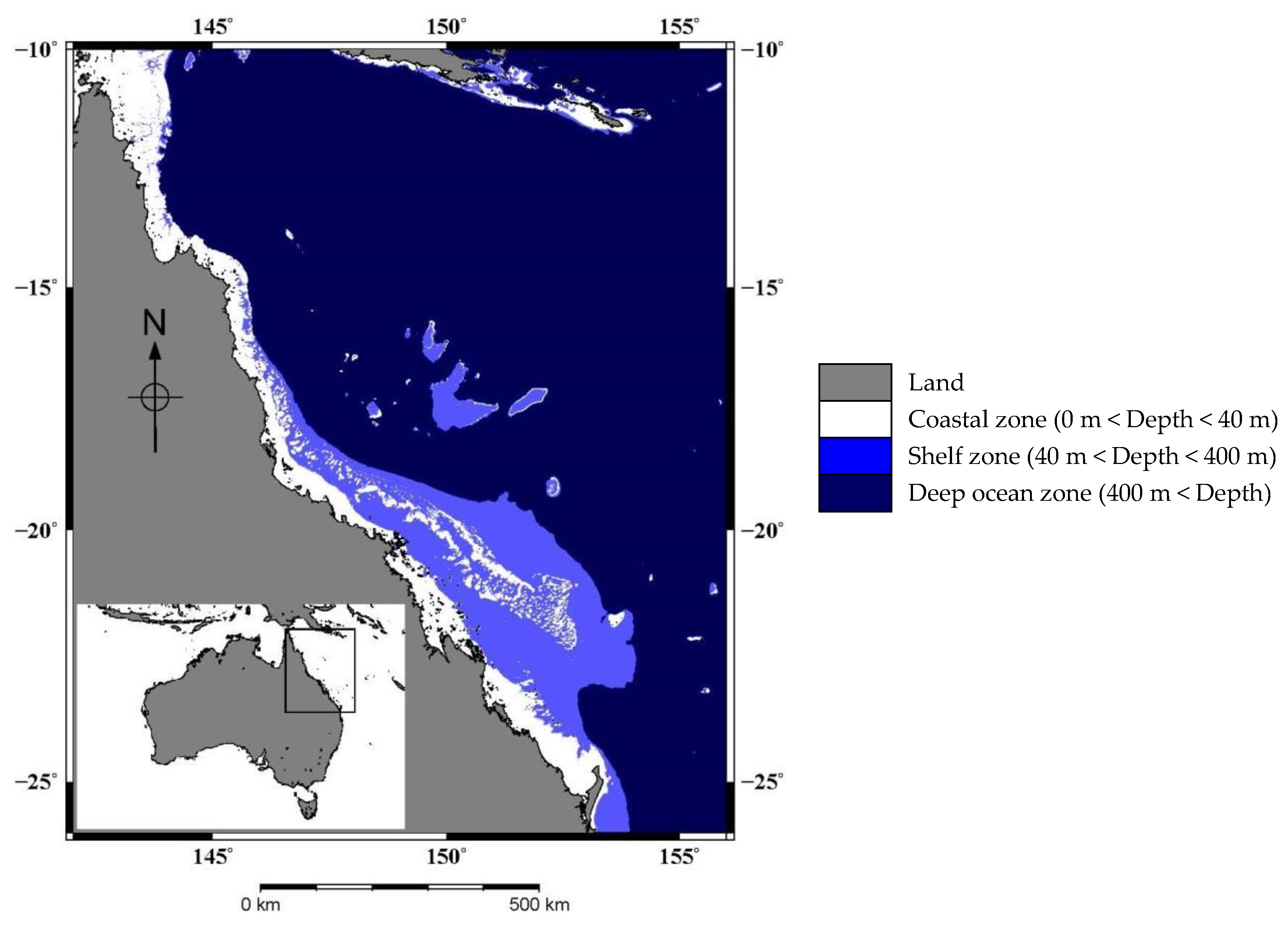
The performance of the UoNGBR model is assessed in four different zones (cf.
Figure 1). For model validation, the UoNGBR-derived ocean tide corrections are used to detide the SLAts made by both tide gauges and Sentinel-3A. In addition, the SLAts are detided using other seven tidal models, including FES2012, FES2014, TPXO8, TPXO9, GOT 4.10, DTU10 and EOT11a. The RMS of the detided SLAs is then computed for each tidal model. The magnitude of RMS of the SLAs can be used to assess the efficiency of the tidal models, with the small RMS indicating the better performance of the model. The comparison among computed mean RMS errors are shown in
Table 6 and
Figure 7. In order to assess the overall performance of models, the Root Sum Square (RSS) of mean RMS values over all four zones were calculated from:
In
Table 6, both TPXO8 and TPXO9 have been implemented by the representer approach proposed in OTIS, which is the same approach as used for UoNGBR. It can be seen that UoNGBR performs more efficiently than TPXO9 and TPXO8 with the mean RMS differences (TPXO-UoNGBR) of 19.3 cm and 16.3 cm, respectively, over the coastline. In addition, mean RMS differences between TPXO models and UoNGBR over coastal and shelf zones are ~5 cm and ~3 cm, respectively. These noticeable mean RMS differences suggest that tidal estimations have been significantly improved in UoNGBR due to several reasons, such as using a more accurate bathymetry, spatial variable drag coefficients, editing the OTIS default for representer locations and including more tidal constituents. The major improvement lies in shallow water regions, where an accurate knowledge of bathymetry is crucial. According to Andersen (1999), the spatial advection of tidal energy from deep to shallow zones is proportional to the square of the water level. This fact reflects on the contribution of the accurate bathymetry used in UoNGBR (i.e., gbr100). Over the deep ocean zone, the three models of UoNGBR, TPXO9 and TPXO8 show similar performance.
The numerical results shown in
Table 6 indicate that spatially varying drag coefficients make important contributions to efficiency of the assimilative tidal model UoNGBR. A seabed of reef type has large drag coefficient values compared to the sand seafloor [
26]. In global tidal models, such as TPXO8 and TPXO9, the drag coefficient may be represented as a constant value, as the majority of sea and ocean beds is of sand type. However, for regional tidal models over GBR, due to the presence of reefs, neglecting the variations of drag coefficients can reduce the accuracy of the model. The UoNGBR is modelled using spatially varying drag coefficients with a more realistic representation of the seabed type, exposing the model to an accurate bottom friction and consequently more accurate tidal constituent amplitudes and phases.
While every altimetry along-track profile and tide gauge locations can be considered as representers, it is impractical to run OTIS due to the size of the matrices. Egbert et al. (1994) proposed that a subset of data locations can be used as representers to tackle matrix size issues. It has been found that the most efficient data locations to be used as representers are where higher density of observations exist [
56]. Therefore, altimetry crossover points are ideal data locations to be considered as representer positions. However, through the modelling experiments it was found that the crossovers located close to the coastlines should be excluded. This is due to the errors associated with altimetry sea-level observations over shallow waters [
73]. Thus, these altimeter crossovers were excluded from the list of representer locations, and were replaced by the closest tide gauge. This resulted in more accurate tidal height predictions from the UoNGBR model.
In the GBR area, empirical models (e.g., DTU10, GOT4.10 and EOT11a) fail to provide accurate tidal heights in comparison to UoNGBR (
Table 6), as expected. Although both DTU10 and GOT 4.10 show more efficient results than EOT11a, they are far less accurate than UoNGBR, especially over coastline, coastal and shelf zones. FES2012 outperforms its successor, FES2014, with the mean RMS difference of ~3 cm over the coastline and coastal zones, while over the shelf and deep ocean zones they both are similar (RMS errors 8.8 cm vs. 8.9 cm). UoNGBR outperforms FES2012 (RMS errors 18.8 cm vs. 19.7 cm) and FES2014 (RMS errors 18.8 cm vs. 23.1 cm) over the coastline. In the coastal zone, this model is still more favourable with the mean RMS being ~1 cm and ~5 cm smaller than FES2012 and FES2014, respectively. The new UoNGBR model performs at the same accuracy level as FES2012 and FES2014 over the shelf and deep ocean zones.
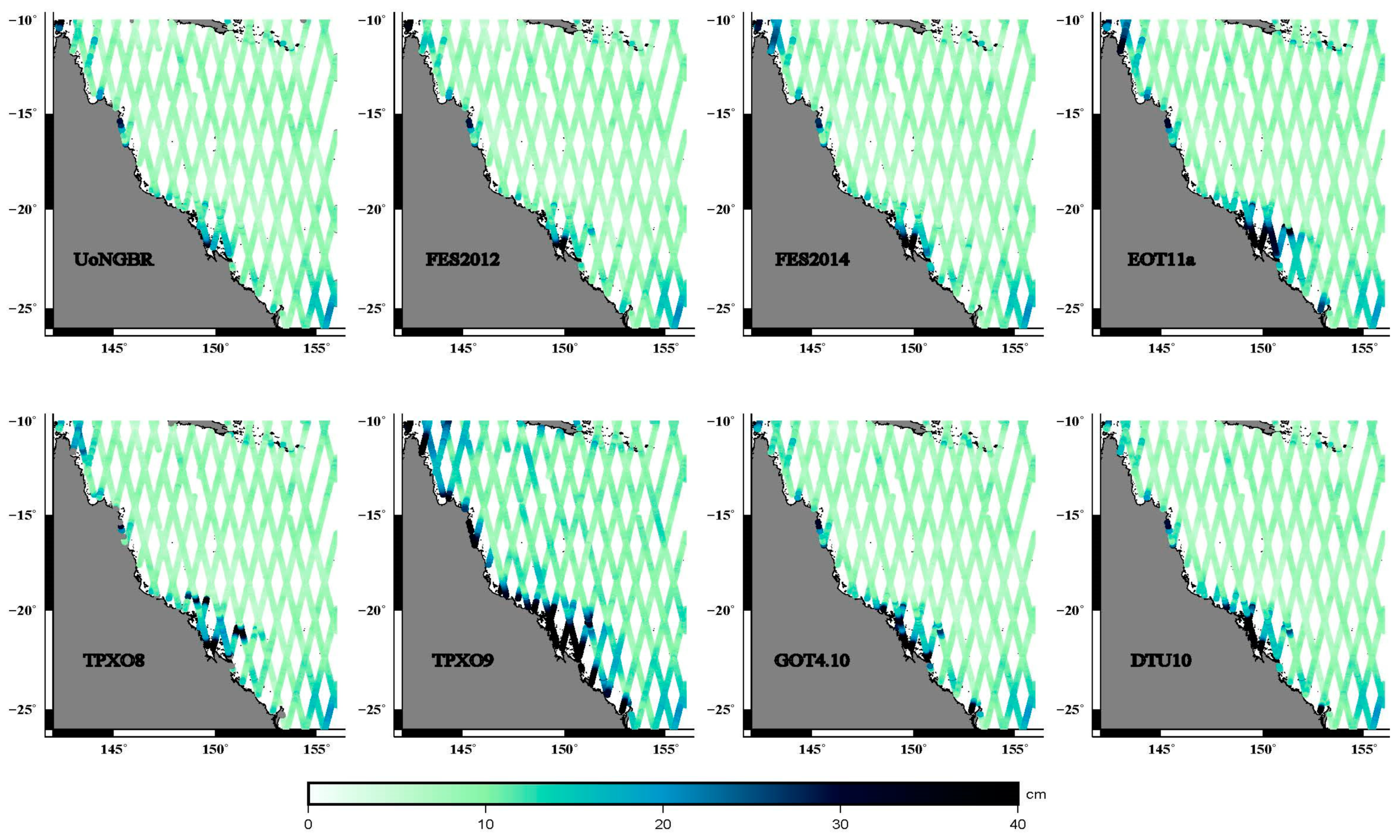
To assess the model capability of predicting tidal heights,
Figure 7 shows the geographical distribution of calculated pointwise RMS values of SLAs over the study area. From
Figure 7, it seems that all models act similarly in deep oceans, while in the shelf zone EOT11a is not as accurate as other models in terms of the tidal height prediction. The models of EOT11a, FES2014, TPXO9, GOT4.10 and DTU10 appear to have inefficiencies, with RMS errors > ~30 cm, in tidal high prediction over all or parts of this area. FES2012 shows an overall acceptable performance and is known as the best model for this region [
44]. However, it is observed that FES2012 is slightly less accurate than UoNGBR at ~1 cm of mean RMS over coastline and coastal zone from
Table 6. The area with large uncertainties along the coastline can be clearly seen in
Figure 7.
The coastline and coastal zone are the main regions that model discrepancies are observed. Over these areas, UoNGBR shows a higher performance, followed by FES2012, GOT4.10 and DTU10. According to
Figure 7, the area bounded by latitudes 20°S to 23°S and longitudes 146° to 151° is where large accuracy discrepancies are shown among models. Our previous study has found that there are sudden fluctuations in bottom topography due to existence of small islands [
60], which is the main reason behind the model inefficiencies. Therefore, we defined this area as the challenging area [
44].
Table 7 shows the performance of models in different zones of the challenging area.
Table 7 reveals the prime performance of UoNGBR over other models in the challenging area. The RSS differences between UoNGBR and FES2012, FES2014 and TPXO8 are ~4, ~21 and ~10 cm, respectively. The considerable difference in the challenging area between UoNGBR and other models mainly lays in coastal zones. Coastal zones in the challenging area include Broad Sound and the Southern GBR, where it is well known to have a complex tidal regime due to complicated bathymetry. Since this area is featured with high fluctuation of bathymetry, the superior efficiency of UoNGBR can be assigned to the use of the high-resolution bathymetry model gbr100. A closer look at the amplitude and phase of M
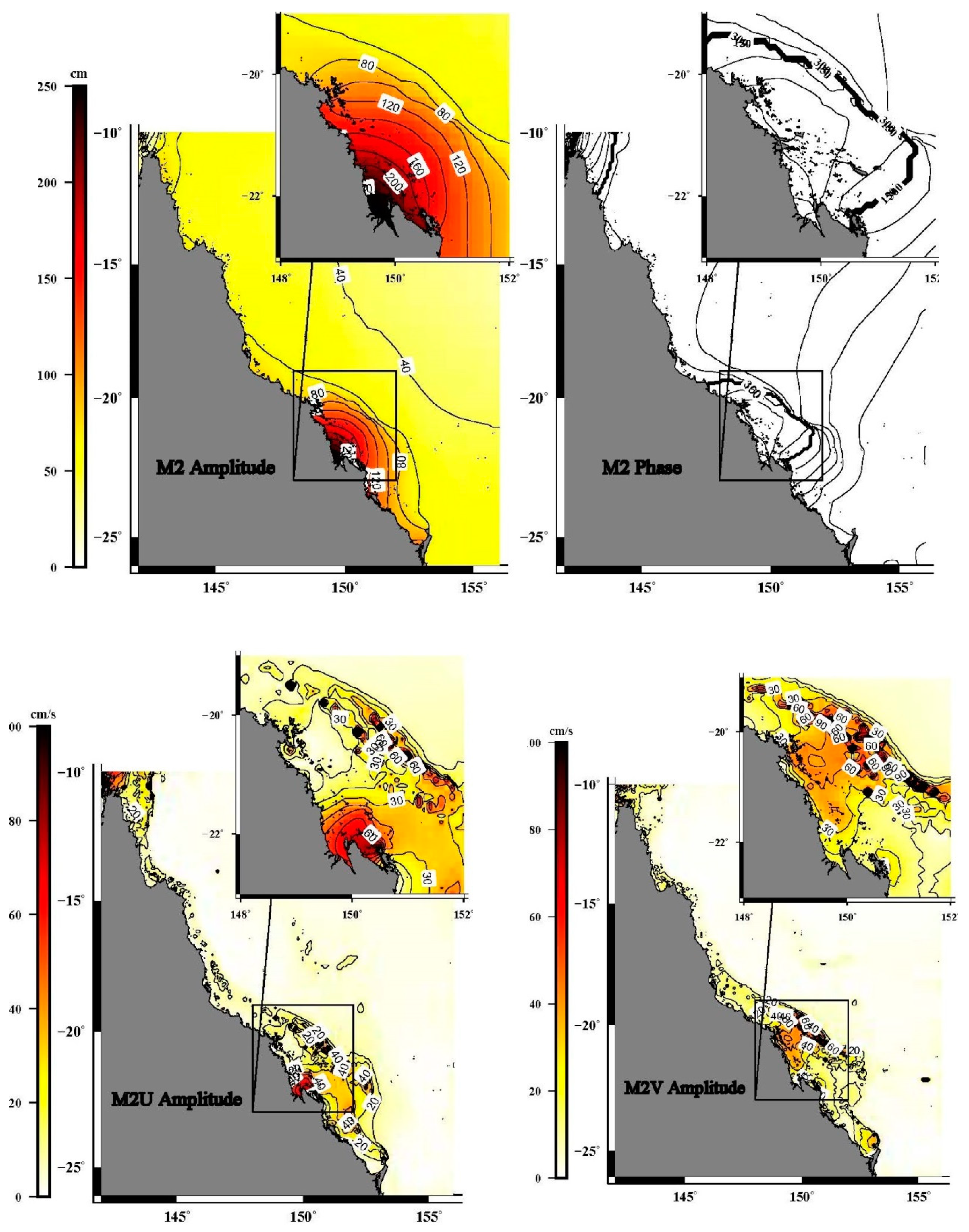
2, interpolated from the UoNGBR model, reveals why tidal models face difficulties in modelling the tidal wave over coastal zones especially in the challenging zone (
Figure 8).
From
Figure 8, it can be seen that over most of the GBR and Coral Sea the amplitude of M2 (top left) shows a monotonic behaviour. Over coastal zones, where most of coral reefs are located, this constituent’s amplitude is magnified, in particular in the challenging area, where amplitudes exceed more than 150 cm near the coastline. The intense variations can also be seen in the phase map (top right in
Figure 8) over the continental slope, where the depth reduces from more than 2000 m to 100 m. This sudden variation in depth affects the phase and amplitude of long wavelength M
2 waves, which are further magnified when proceeding to the coastline. This confirms the fact that accurate knowledge of the bottom geometry of this area is crucial, for which this study has addressed the issue by using the more accurate bathymetry model gbr100.
The U and V tidal current maps of M
2 (bottom panels in
Figure 8) show the fact how existence of small islands and coral reefs along the Queensland coastline shapes the pattern of tidal currents. While the tidal current speed is within a few cm/s over most of the study area, it exceeds 60 cm/s in the challenging zone. The tidal currents may contribute to (or threaten) growth and maintenance of the reef and its ecosystem health through exchanging nutrients and pollutants, as well as sediment and sand transport [
9,
74,
75,
76,
77]. According to
Figure 8, tidal currents in inner reefs are of high amplitudes, which play an important role in exchanging these materials on a daily basis.
6. Conclusions and Recommendations
In this study, the UoNGBR barotropic assimilated tidal model was developed using OTIS software for the GBR and Coral Sea. All available satellite altimetry and coastal sea level observations and marine sea current data for the region are used to constraint the shallow water tidal equations. This model includes 37 major and shallow water tidal constituents that have been spread on a regular grid of 2’ × 2’. The influences of using the new bathymetry model, gbr100, and spatially variable drag coefficient were investigated in a sensitivity analysis and the results are shown in
Figure 5 and
Figure 6 and
Table 3 and
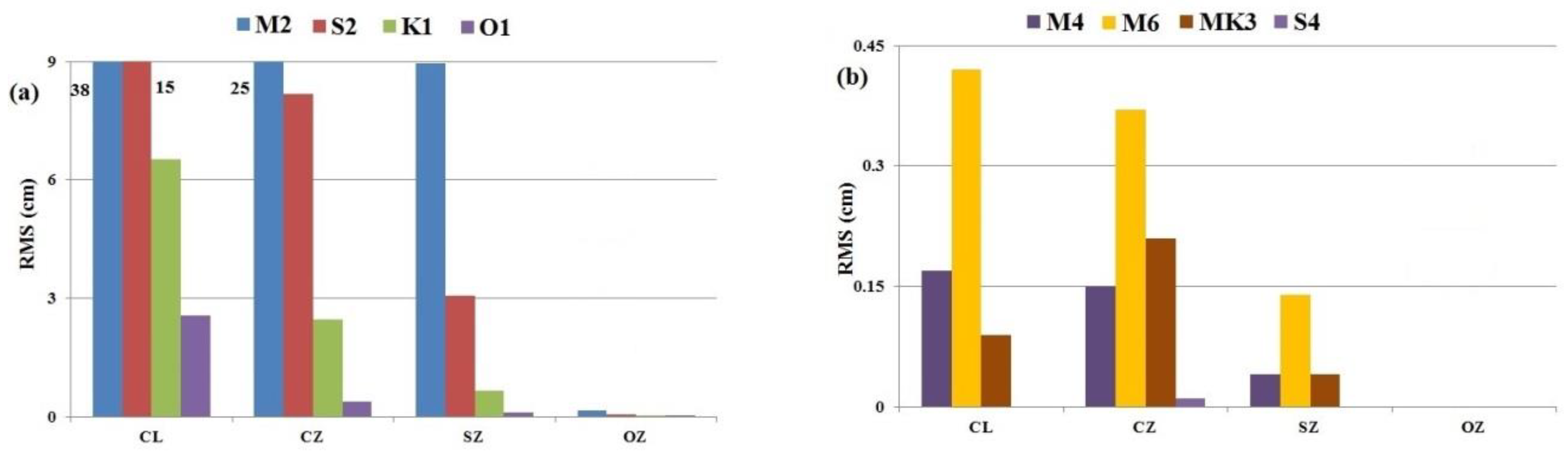
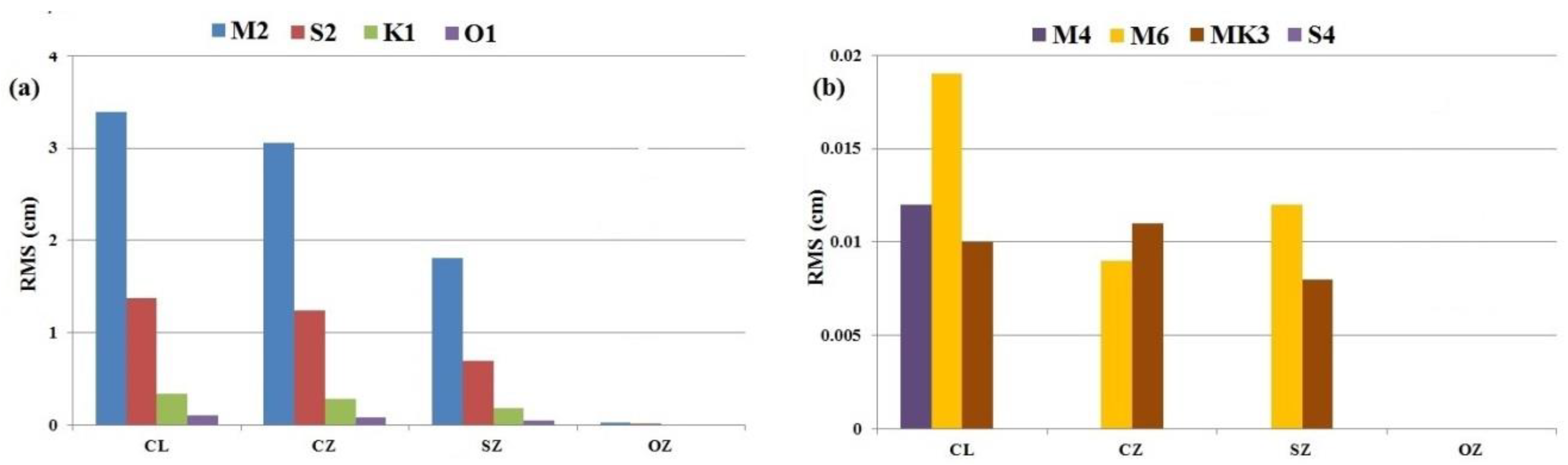
Table 4. The sensitivity analysis shows that using the high-resolution bathymetry model, gbr100, and spatially variable drag coefficients largely contribute to the estimation of major tidal constituents in this area. Since the new bathymetry has a high spatial resolution of 3.6″ × 3.6″, it is able to provide accurate information about sudden fluctuations in bathymetry due to the small islands and coral reefs.
Figure 5 and
Figure 6 reveal that new datasets improve the accuracy of major tidal constituents more than shallow water components. Our new tidal model benefited from detailed information about dynamics of the area, resulting in relatively superior performance to other models especially over areas with highly complex bottom topography. The UoNGBR data can be found in
supplementary files associated with this paper.
There are challenges over the GBR region, which can be the main error sources for the UoNGBR model and thus subject to future studies. Some parts of the GBR region are too shallow at low tides and become deeper at high tides. This proposes the high rate of variations in bottom friction. Although the drag coefficient variations have been spatially considered in this study, their temporal variation features have not yet been investigated. In addition, the simplifications made in OTIS, such as using linearized shallow water equations, can be a source of error for the new model. Furthermore, a cross validation of how input datasets with different temporal and spatial scales affect the robustness of assimilated models should be considered in future studies.
The bathymetry in this study has been considered as constant in value. However, in reality due to the existence of numerous islands and coral reefs, bathymetry varies noticeably [
6]. The constant bathymetry may not represent the reality of seafloor topography. In addition, while the 2′ × 2′ grid resolution was generated for the UoNGBR model, it is possible to use a multiple resolution grid for this area due to existence of the higher spatial resolution bathymetry [
24]. In other words, a denser grid can be used over highly varying bathymetry areas, while the sparse grids can be taken over deeper ocean zones. Therefore, for future research, it is suggested that using higher order terms of bottom friction, time variant bathymetry and multi-resolution grids can further contribute to better understanding of tides in the GBR and Coral Sea.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}