Figure 1.
Location of epicenters of the 2016 Kumamoto earthquake (fore- and main-shocks) and Mashiki town.
Figure 1.
Location of epicenters of the 2016 Kumamoto earthquake (fore- and main-shocks) and Mashiki town.
Figure 2.
Work flow for the establishment of the analysis model and dataset of demolished/remaining buildings.
Figure 2.
Work flow for the establishment of the analysis model and dataset of demolished/remaining buildings.
Figure 3.
OpenStreetMap (OSM) [
19] polygons and OSM data refined by attribution: (
a) The whole view on Mashiki town and (
b) zoomed-in view of the rectangle area.
Figure 3.
OpenStreetMap (OSM) [
19] polygons and OSM data refined by attribution: (
a) The whole view on Mashiki town and (
b) zoomed-in view of the rectangle area.
Figure 4.
Buildings that were not recorded in the OSM data: (a) The whole view on Mashiki town and (b) zoomed-in view of the rectangle area.
Figure 4.
Buildings that were not recorded in the OSM data: (a) The whole view on Mashiki town and (b) zoomed-in view of the rectangle area.
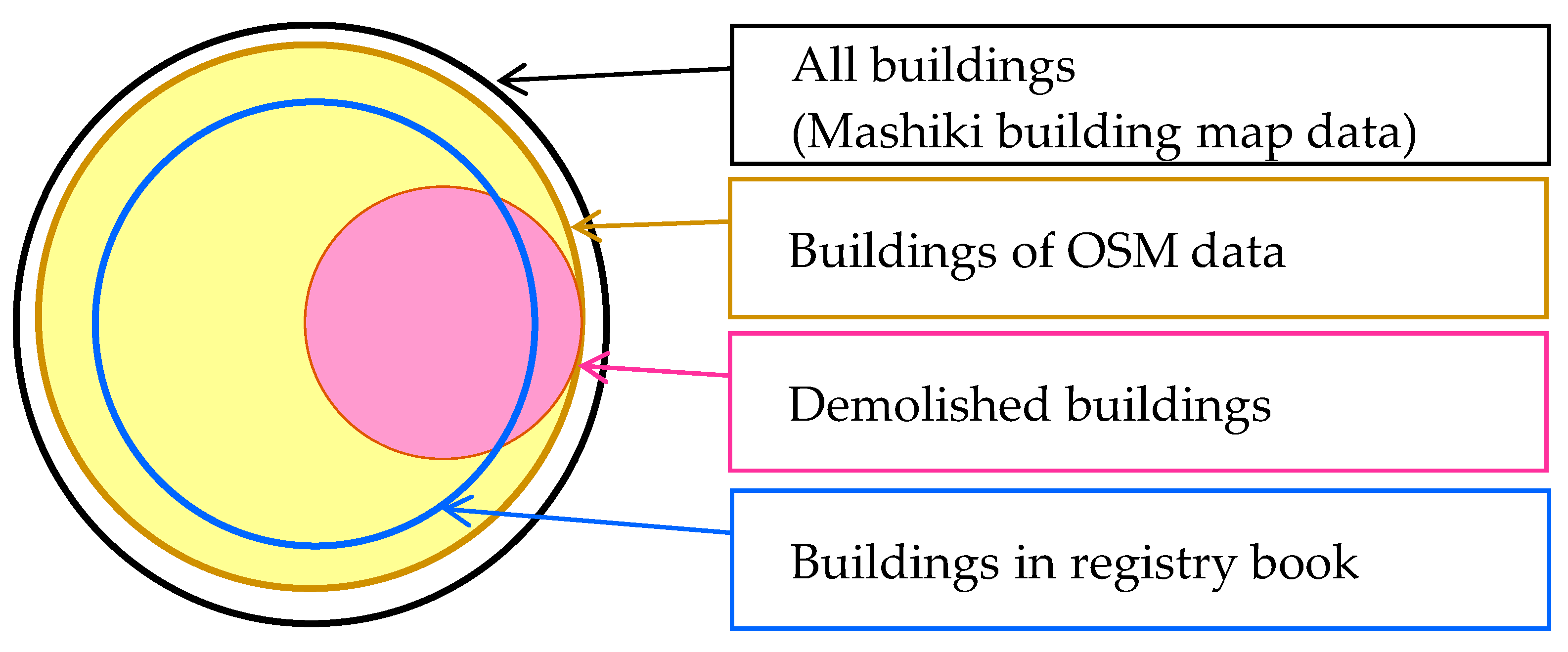
Figure 5.
Euler diagram of coverage of all buildings, buildings of the OSM data, demolished buildings, and buildings in the registry book of Mashiki administration.
Figure 5.
Euler diagram of coverage of all buildings, buildings of the OSM data, demolished buildings, and buildings in the registry book of Mashiki administration.
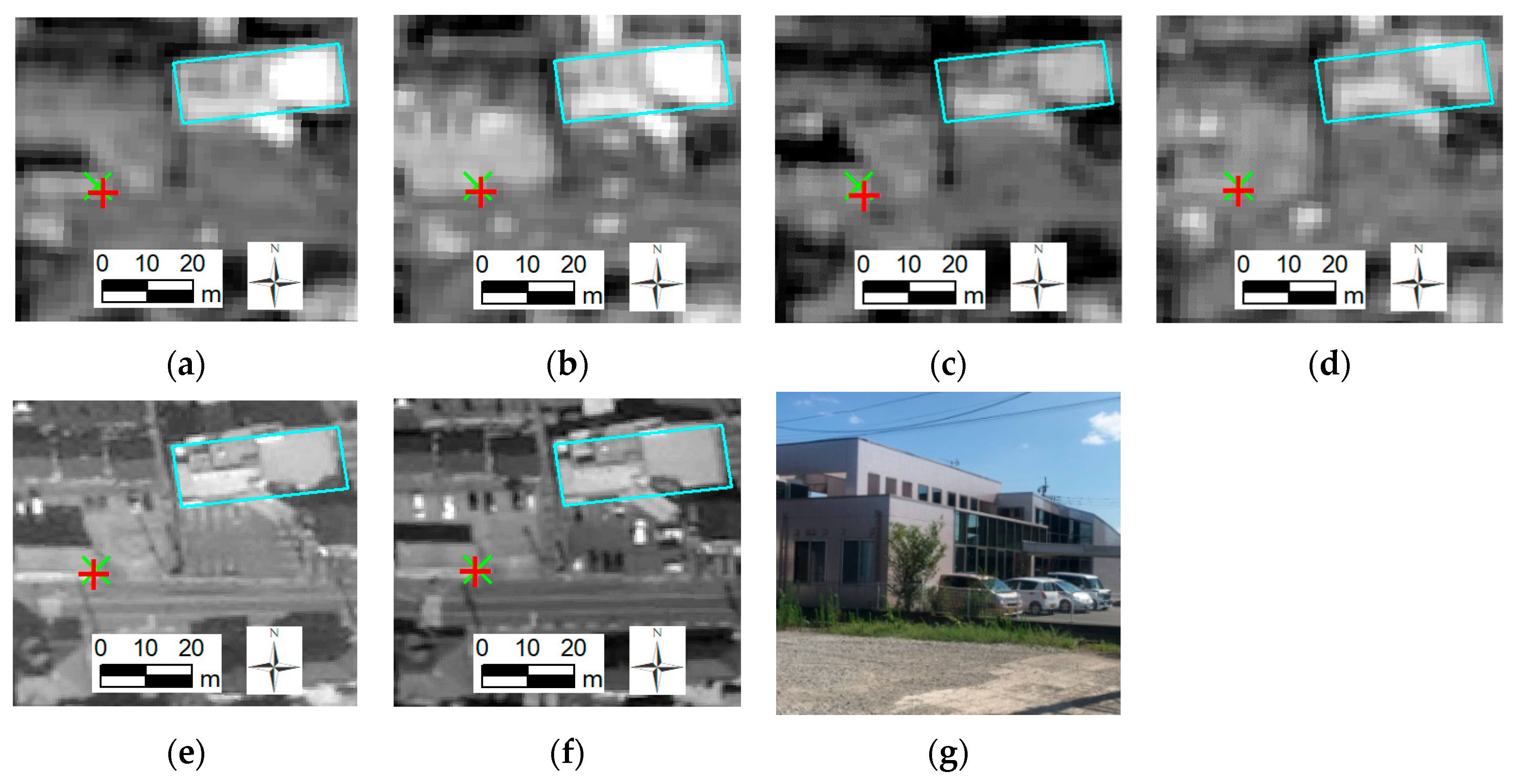
Figure 6.
Geometric evaluation of the orthorectified satellite imagery data. The GPS measured position (green X), the position of the building corner in images (red +), and the building footprint of the OSM data is overlaid on a (a) SPOT image on 20 March 2016; (b) SPOT image on 29 July 2016; (c) SPOT image on 1 January 2017; (d) SPOT image on 25 March 2018; (e) Pleiades image on 1 January 2017; and (f) Pleiades image on 13 October 2018. (g) Picture of the building from the position that the GPS measured toward the building outlined footprint of the OSM data.
Figure 6.
Geometric evaluation of the orthorectified satellite imagery data. The GPS measured position (green X), the position of the building corner in images (red +), and the building footprint of the OSM data is overlaid on a (a) SPOT image on 20 March 2016; (b) SPOT image on 29 July 2016; (c) SPOT image on 1 January 2017; (d) SPOT image on 25 March 2018; (e) Pleiades image on 1 January 2017; and (f) Pleiades image on 13 October 2018. (g) Picture of the building from the position that the GPS measured toward the building outlined footprint of the OSM data.
Figure 7.
Photos taken at arrow positions (
a–
d) shown in
Figure 8.
Figure 7.
Photos taken at arrow positions (
a–
d) shown in
Figure 8.
Figure 8.
Dataset polygon to establish a model by field survey of the area with a background image of Pleiades observed on 1 January 2017. Arrow positions (
a–
d) of sample photos in
Figure 7.
Figure 8.
Dataset polygon to establish a model by field survey of the area with a background image of Pleiades observed on 1 January 2017. Arrow positions (
a–
d) of sample photos in
Figure 7.
Figure 9.
Distribution and average of the digital number (DN) within the building footprints of OSM data from SPOT images observed on: (a) 20 March 2016; (b) 29 July 2017; (c) 1 January 2017; and (d) 25 March 2018.
Figure 9.
Distribution and average of the digital number (DN) within the building footprints of OSM data from SPOT images observed on: (a) 20 March 2016; (b) 29 July 2017; (c) 1 January 2017; and (d) 25 March 2018.
Figure 10.
Training data with labels of demolished and remaining buildings and background image of SPOT observed on: (a) 20 March 2016; (b) 29 July 2016; (c) 1 January 2017; and (d) 25 March 2018.
Figure 10.
Training data with labels of demolished and remaining buildings and background image of SPOT observed on: (a) 20 March 2016; (b) 29 July 2016; (c) 1 January 2017; and (d) 25 March 2018.
Figure 11.
Binary images calculated from: (a) 20 March 2016; (b) 29 July 2016; (c) 1 January 2017; and (d) 25 March 2018.
Figure 11.
Binary images calculated from: (a) 20 March 2016; (b) 29 July 2016; (c) 1 January 2017; and (d) 25 March 2018.
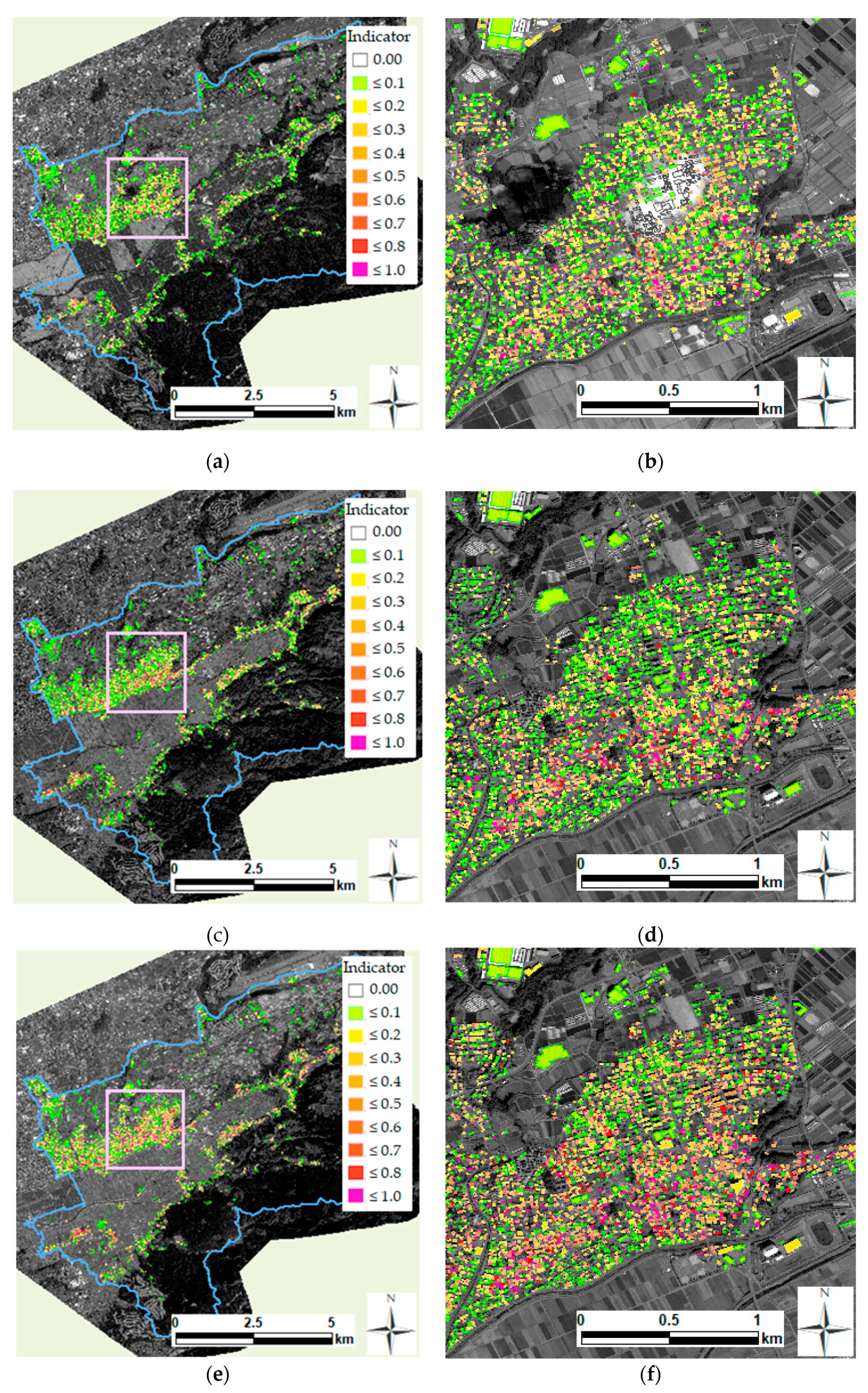
Figure 12.
Indicator distribution map: (a) Result from 20 March 2016 SPOT image; (c) result from 1 January 2017 SPOT image; (e) result from 25 March 2018 SPOT image; and (b,d,f) zoomed-in views of the rectangle area for each result.
Figure 12.
Indicator distribution map: (a) Result from 20 March 2016 SPOT image; (c) result from 1 January 2017 SPOT image; (e) result from 25 March 2018 SPOT image; and (b,d,f) zoomed-in views of the rectangle area for each result.
Figure 13.
Receiver operating characteristics (ROC) curve for the true positive (TP) rate against the false positive (FP) rate based on the indicator and the training dataset with 110 labels in the Mashiki building map data.
Figure 13.
Receiver operating characteristics (ROC) curve for the true positive (TP) rate against the false positive (FP) rate based on the indicator and the training dataset with 110 labels in the Mashiki building map data.
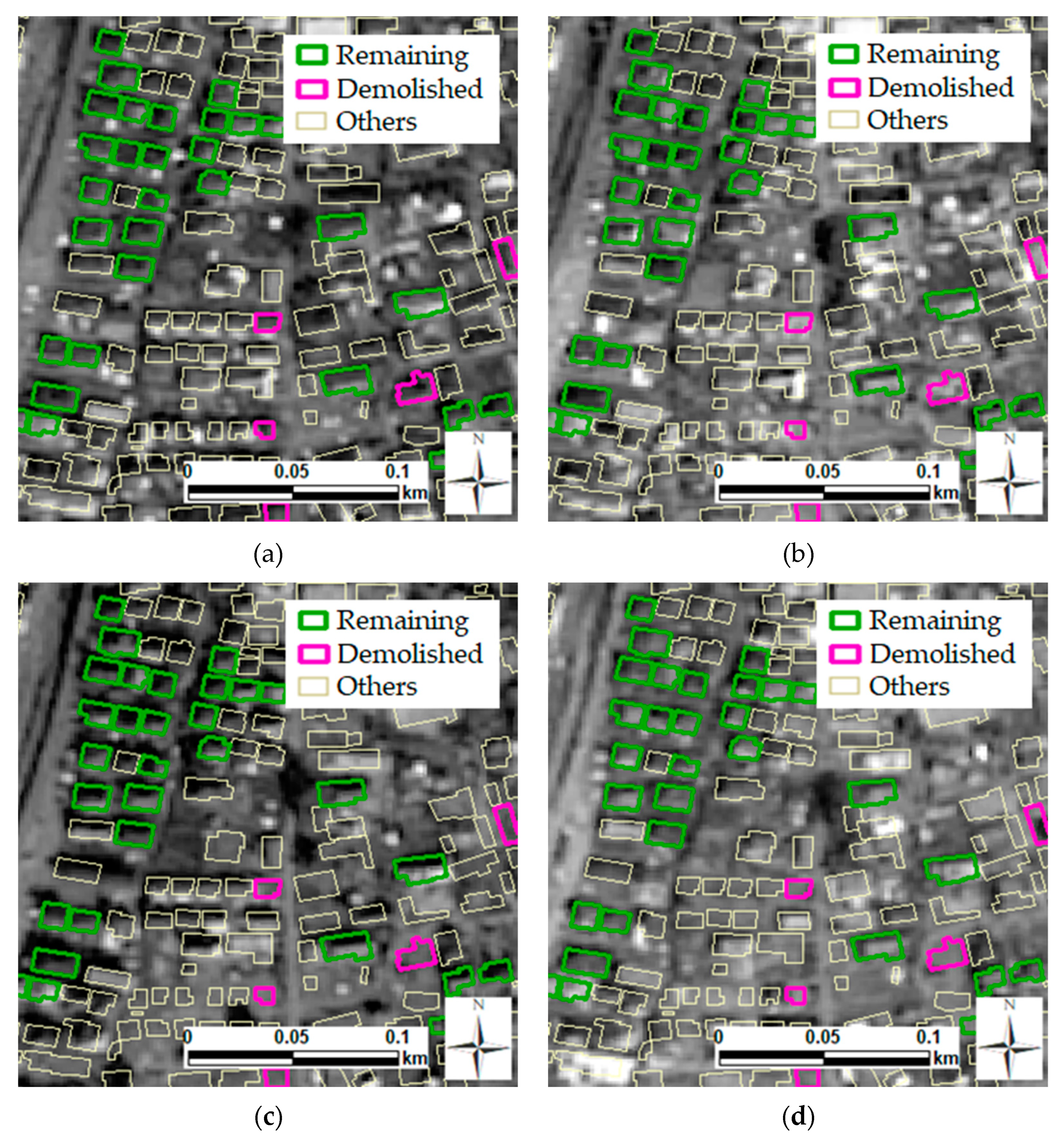
Figure 14.
Visual interpretation of the indicator distribution map with transparent colors the same as
Figure 12. (
a) 20 March 2016 SPOT image; (
b) 1 January 2017 SPOT image; and (
c) 1 January 2017 Pleiades image. (
d) Result of demolished building polygons by visual interpretation in the light blue outline.
Figure 14.
Visual interpretation of the indicator distribution map with transparent colors the same as
Figure 12. (
a) 20 March 2016 SPOT image; (
b) 1 January 2017 SPOT image; and (
c) 1 January 2017 Pleiades image. (
d) Result of demolished building polygons by visual interpretation in the light blue outline.
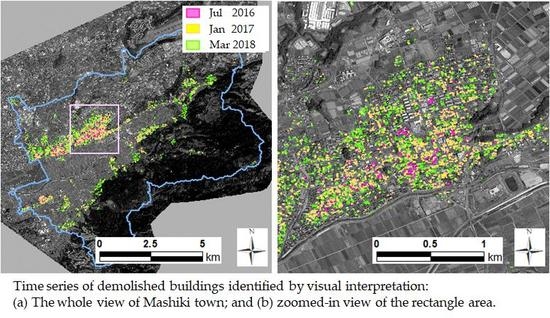
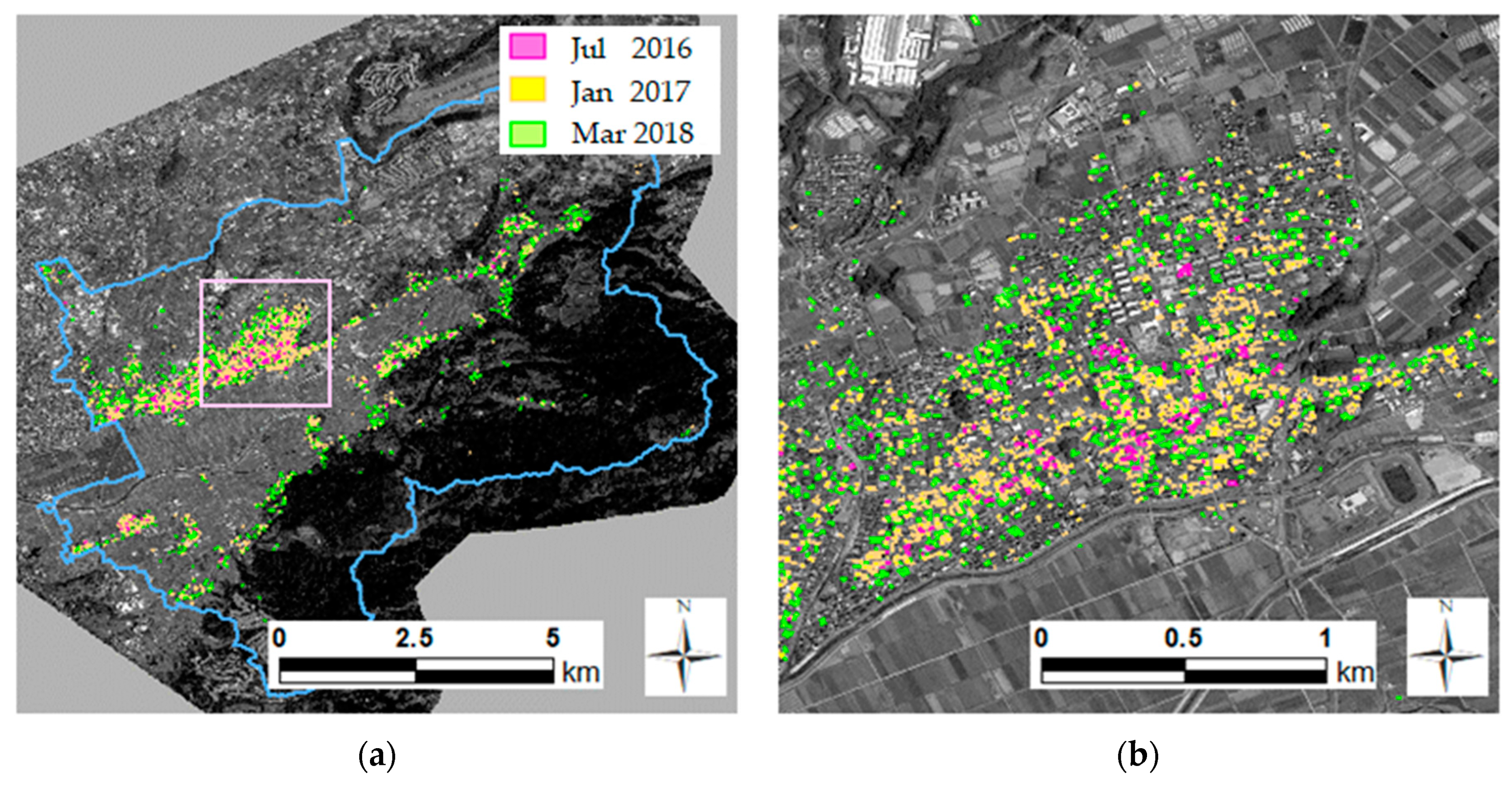
Figure 15.
Time series of demolished buildings identified by visual interpretation: (a) The whole view of Mashiki town; and (b) zoomed-in view of the rectangle area.
Figure 15.
Time series of demolished buildings identified by visual interpretation: (a) The whole view of Mashiki town; and (b) zoomed-in view of the rectangle area.
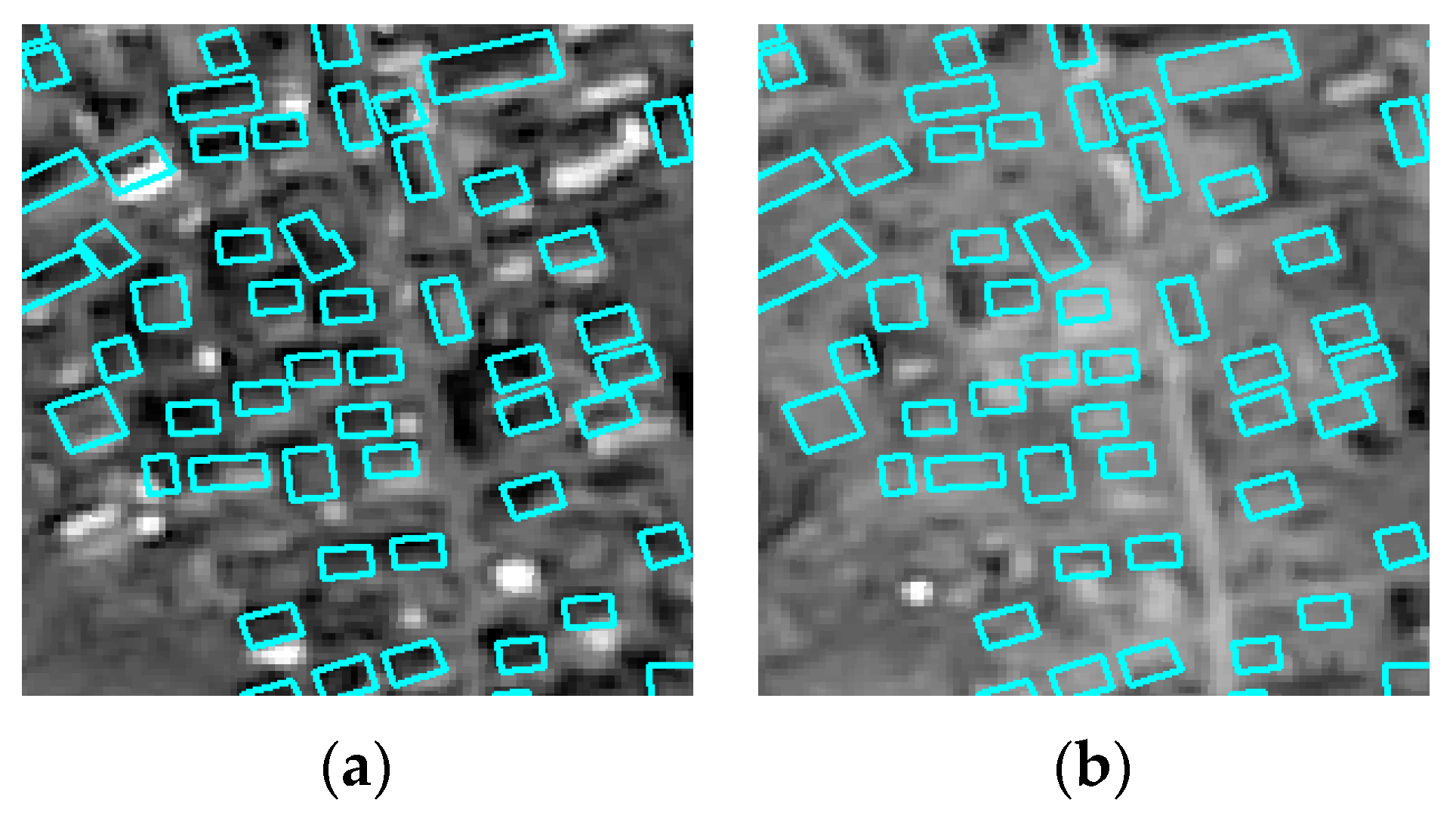
Figure 16.
Examples of the estimation of a TP by an indicator >0.3 drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 16.
Examples of the estimation of a TP by an indicator >0.3 drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 17.
Examples of the estimation of a true negative (TN) by indicator ≤0.3 drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 17.
Examples of the estimation of a true negative (TN) by indicator ≤0.3 drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 18.
Examples of the wrong estimation of a FP due to anomalous bright pixels drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 18.
Examples of the wrong estimation of a FP due to anomalous bright pixels drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 19.
Examples of positions and reflecting objects causing anomalous bright pixels: (
a) 25 March 2016 SPOT image and arrows showing position for (
b–
d) of Google Earth imageries [
30]; (
b) solar cell panels; (
c) solar heating water tank; and (
d) solar heating water tank.
Figure 19.
Examples of positions and reflecting objects causing anomalous bright pixels: (
a) 25 March 2016 SPOT image and arrows showing position for (
b–
d) of Google Earth imageries [
30]; (
b) solar cell panels; (
c) solar heating water tank; and (
d) solar heating water tank.
Figure 20.
Examples of the estimation of a FP due to bright reflection from building walls drawn in blue outline on a: (a) 20 Mar 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 20.
Examples of the estimation of a FP due to bright reflection from building walls drawn in blue outline on a: (a) 20 Mar 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 21.
Examples of the roof position shifted due to different view angles and tall buildings drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 21.
Examples of the roof position shifted due to different view angles and tall buildings drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 22.
Examples of false negative (FN) estimation due to small areas of demolished buildings drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Figure 22.
Examples of false negative (FN) estimation due to small areas of demolished buildings drawn in blue outline on a: (a) 20 March 2016 SPOT image; and (b) 25 March 2018 SPOT image.
Table 1.
List of satellite images selected in this research.
Table 1.
List of satellite images selected in this research.
| Observation Date | Satellite Name | Resolution | Incidence Angle 1 | Usage |
|---|
| Along 2 | Across 3 |
|---|
| 20 March 2016 | SPOT-7 | 1.5 m | −15.3 | −10.4 | Analysis |
| 29 July 2016 | SPOT-6 | 1.5 m | 14.4 | −0.3 | Analysis |
| 11 August 2016 | SPOT-7 | 1.5 m | −18.2 | 7.0 | Interpolation |
| 1 January 2017 | SPOT-6 | 1.5 m | 2.8 | 0.8 | Analysis |
| 25 March 2018 | SPOT-7 | 1.5 m | 20.5 | −11.4 | Analysis |
| 1 January 2017 | Pleiades-1B | 0.5 m | 7.4 | 11.6 | Interpretation |
| 13 October 2018 | Pleiades-1B | 0.5 m | 13.5 | 6.5 | Interpretation |
Table 2.
Number of demolished and remaining buildings in the training dataset in the Mashiki building map data.
Table 2.
Number of demolished and remaining buildings in the training dataset in the Mashiki building map data.
| Class | Number of Buildings |
|---|
| Demolished | 55 |
| Remaining | 55 |
| Total | 110 |
Table 3.
Confusion matrix between estimated class and interpretation.
Table 3.
Confusion matrix between estimated class and interpretation.
| | Estimation |
|---|
| Demolished | Remaining |
|---|
| Actual building situation | Demolished | True Positive (TP) | False Negative (FN) |
| Remaining | False Positive (FP) | True Negative (TN) |
Table 4.
Number of demolished buildings by our proposed method compared to the report of Mashiki municipality.
Table 4.
Number of demolished buildings by our proposed method compared to the report of Mashiki municipality.
| | 29 July 2016 | 1 January 2017 | 25 March 2018 |
|---|
| Our proposed method | 234 | 2837 | 5701 |
| | 31 July 2016 | 31 December 2016 | 31 March 2018 |
| Report of Mashiki administration | 219 | 2395 | 5702 |
Table 5.
F-measure by threshold for each observation date.
Table 5.
F-measure by threshold for each observation date.
| Threshold | 29 July 2016 | 1 January 2017 | 29 July 2016 |
|---|
| 0.0 | 0.748 | 0.743 | 0.688 |
| 0.1 | 0.887 | 0.908 | 0.780 |
| 0.2 | 0.940 | 0.955 | 0.864 |
| 0.3 | 0.965 | 0.962 | 0.920 |
| 0.4 | 0.954 | 0.942 | 0.906 |
| 0.5 | 0.922 | 0.911 | 0.857 |
| 0.6 | 0.900 | 0.842 | 0.778 |
| 0.7 | 0.675 | 0.659 | 0.571 |
| 0.8 | 0.533 | 0.429 | 0.429 |
| 0.9 | 0.226 | 0.167 | 0.226 |
Table 6.
Confusion matrix by the indicator and threshold of 0.3 for 29 July 2016 image.
Table 6.
Confusion matrix by the indicator and threshold of 0.3 for 29 July 2016 image.
| | Estimation | |
|---|
| Demolished | Remaining |
|---|
| Interpretation | Demolished | 218 | 16 | 234 |
| Remaining | 1532 | 14,125 | 15,657 |
| | 1750 | 14,141 | 15,891 1 |
Table 7.
Confusion matrix by the indicator and threshold of 0.3 for 1 January 2017 image.
Table 7.
Confusion matrix by the indicator and threshold of 0.3 for 1 January 2017 image.
| | Estimation | |
|---|
| Demolished | Remaining |
|---|
| Interpretation | Demolished | 1476 | 1361 | 2837 |
| Remaining | 653 | 12,429 | 13,082 |
| | 2129 | 13,790 | 15,919 1 |
Table 8.
Confusion matrix by the indicator and threshold of 0.3 for 25 March 2018 image.
Table 8.
Confusion matrix by the indicator and threshold of 0.3 for 25 March 2018 image.
| | Estimation | |
|---|
| Demolished | Remaining |
|---|
| Interpretation | Demolished | 2682 | 3019 | 5701 |
| Remaining | 882 | 9268 | 10,150 |
| | 3564 | 12,287 | 15,851 1 |
Table 9.
Precision, recall, specificity, accuracy, and F-measure based on the confusion matrix for three image dates by the whole OSM dataset.
Table 9.
Precision, recall, specificity, accuracy, and F-measure based on the confusion matrix for three image dates by the whole OSM dataset.
| Date | Precision | Recall | Specificity | Accuracy | F-measure |
|---|
| 29 July 2016 | 0.125 | 0.932 | 0.902 | 0.903 | 0.220 |
| 1 January 2017 | 0.693 | 0.520 | 0.950 | 0.873 | 0.594 |
| 25 March 2018 | 0.753 | 0.470 | 0.913 | 0.754 | 0.579 |
Table 10.
Precision, recall, specificity, accuracy, and F-measure based on the confusion matrix for three image dates by the test dataset of 100 demolished and 100 remaining buildings.
Table 10.
Precision, recall, specificity, accuracy, and F-measure based on the confusion matrix for three image dates by the test dataset of 100 demolished and 100 remaining buildings.
| Date | Precision | Recall | Specificity | Accuracy | F-measure |
|---|
| 29 July 2016 | 0.050 | 0.940 | 0.945 | 0.949 | 0.940 |
| 1 January 2017 | 0.020 | 0.840 | 0.903 | 0.977 | 0.840 |
| 25 March 2018 | 0.060 | 0.790 | 0.854 | 0.929 | 0.790 |
Table 11.
Relationship between the building area ≤60 m2 and the estimation classification by the indicator of 0.3 in the 25 March 2018 image.
Table 11.
Relationship between the building area ≤60 m2 and the estimation classification by the indicator of 0.3 in the 25 March 2018 image.
| | Estimation | |
|---|
| Demolished | Remaining |
|---|
| Interpretation | Demolished | 566 | 957 | 1523 |
| Remaining | 184 | 2067 | 2251 |
| | 750 | 3024 | 3774 |
Table 12.
Relationship between the building area >60 m2 of the footprint and true false of the estimation by the indicator of 0.3 in the 25 March 2018 image.
Table 12.
Relationship between the building area >60 m2 of the footprint and true false of the estimation by the indicator of 0.3 in the 25 March 2018 image.
| | Estimation | |
|---|
| Demolished | Remaining |
|---|
| Interpretation | Demolished | 2064 | 2059 | 4123 |
| Remaining | 692 | 7152 | 7844 |
| | 2756 | 9211 | 11,967 |
Table 13.
Precision, recall, specificity, accuracy, and F-measure based on the confusion matrixes of
Table 11 and
Table 12.
Table 13.
Precision, recall, specificity, accuracy, and F-measure based on the confusion matrixes of
Table 11 and
Table 12.
| | Precision | Recall | Specificity | Accuracy | F-measure |
|---|
| Area ≤60 m2 | 0.755 | 0.372 | 0.918 | 0.698 | 0.498 |
| Area >60 m2 | 0.749 | 0.501 | 0.912 | 0.770 | 0.600 |

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}