On-Orbit Radiance Calibration of Nighttime Sensor of LuoJia1-01 Satellite Based on Lunar Observations

 ,
,  , ,
, ,  ,
,
Abstract
1. Introduction
- Before imaging, the satellite maneuvers to a predetermined position and points to the moon;
- The satellite sensor is turned on for lunar imaging, and the satellite attitude is adjusted to point to the moon during the imaging process;
- After the imaging is completed, the satellite adjusts its attitude and returns to the conventional ground-based observations mode.
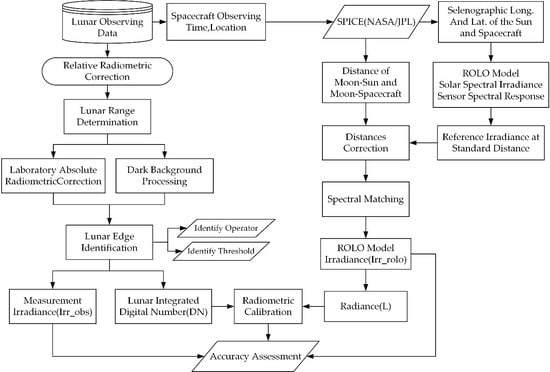
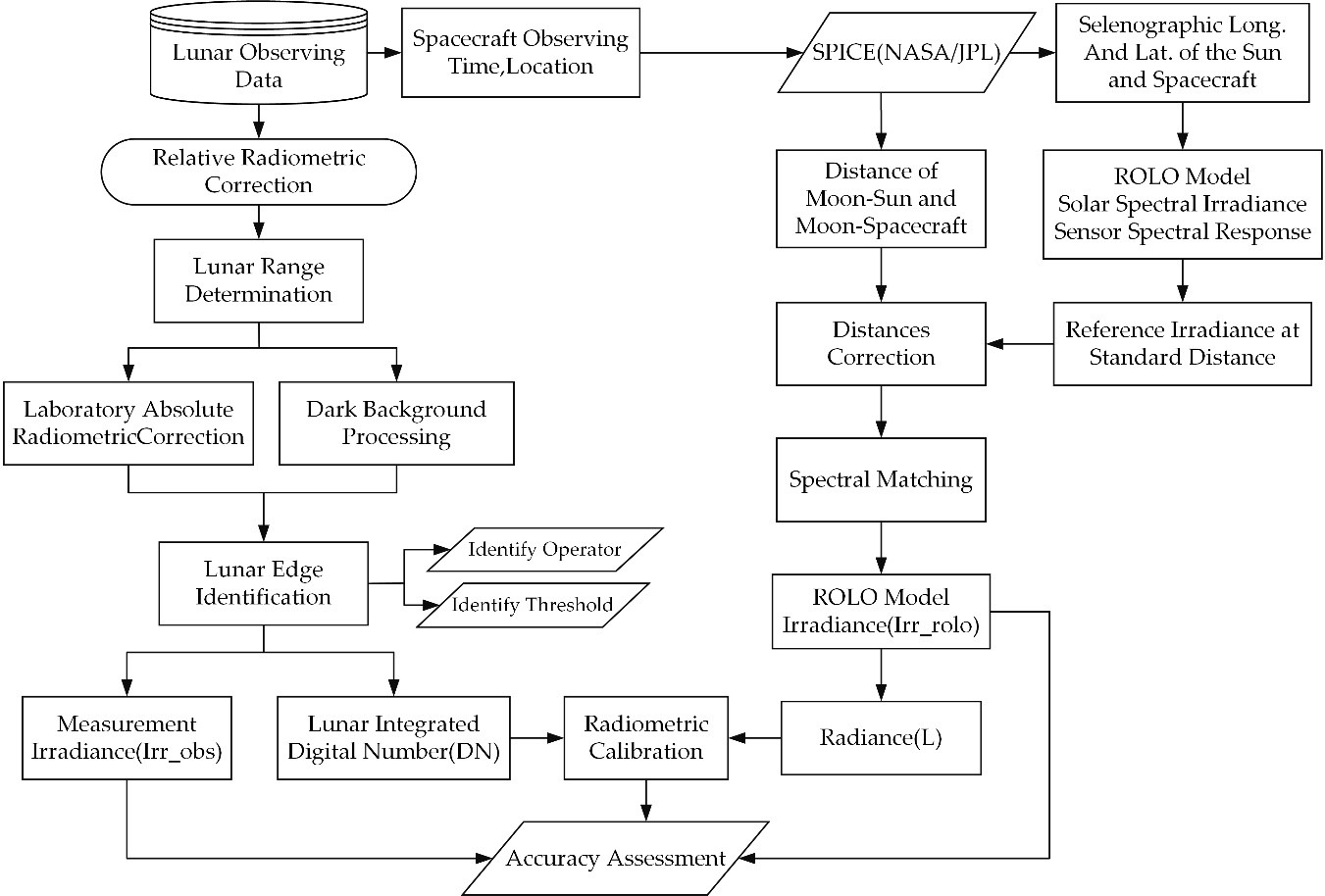
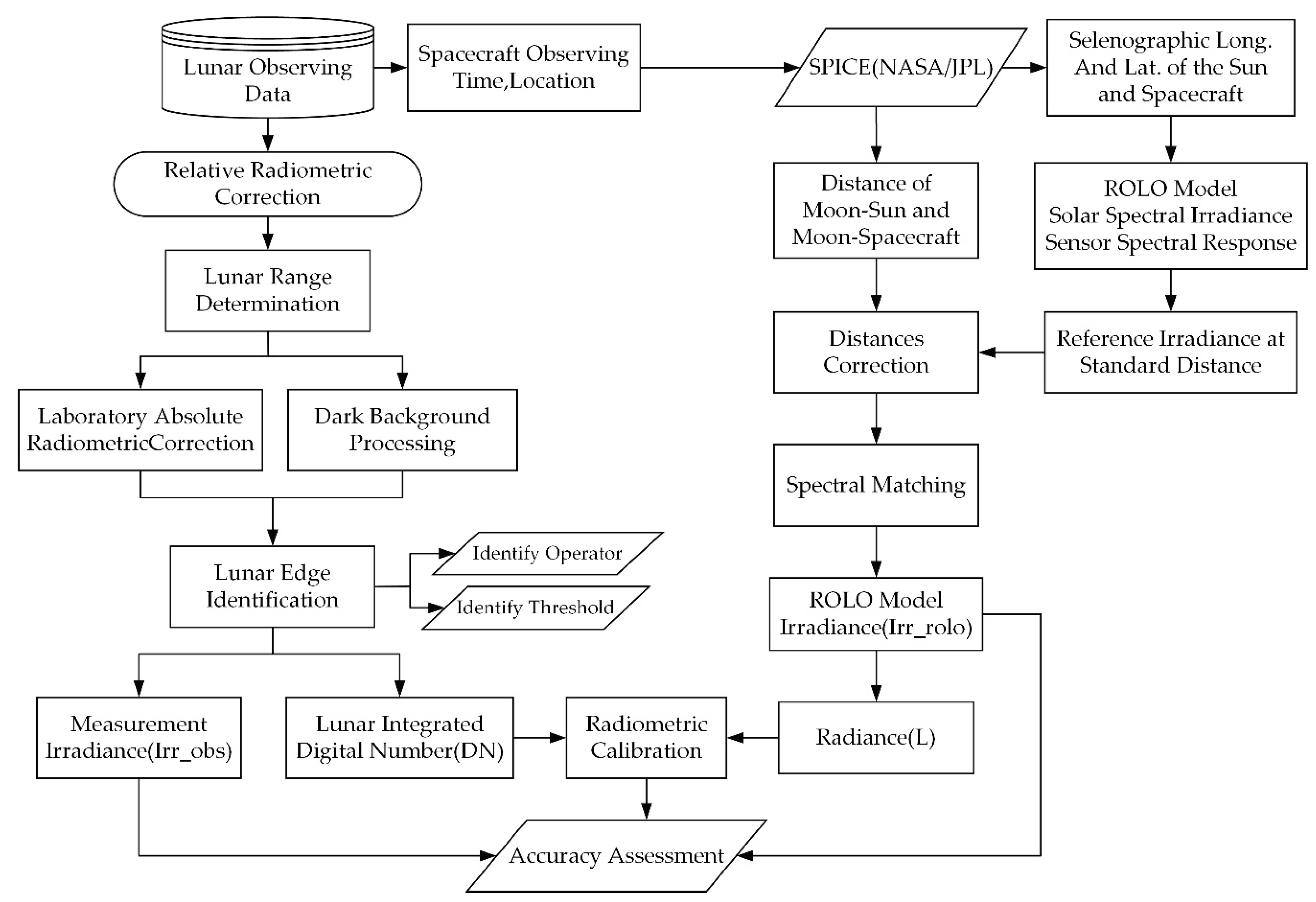
2. Methodology
2.1. Radiometric Correction
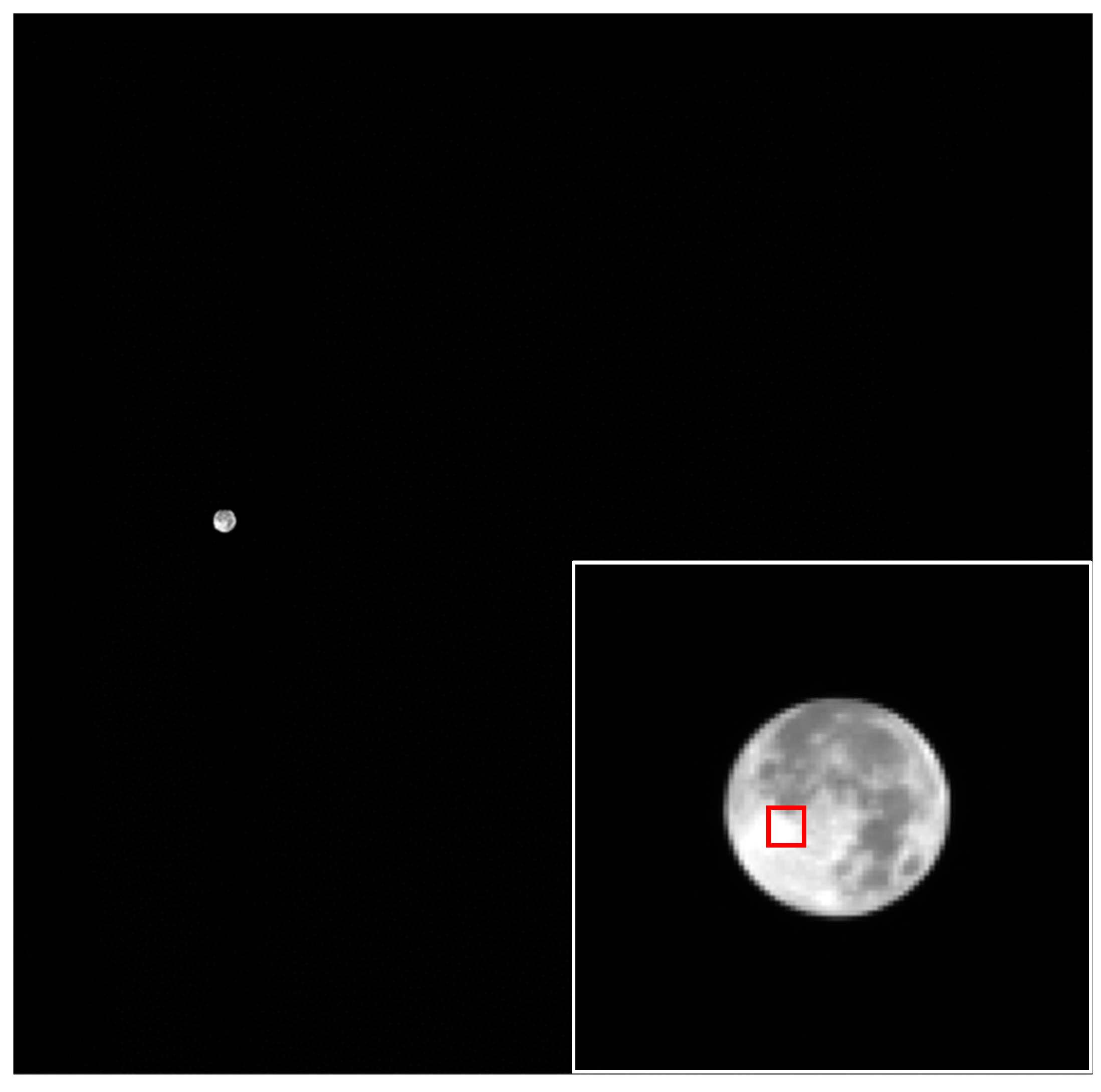
2.2. Determination of the Scope of the Moon
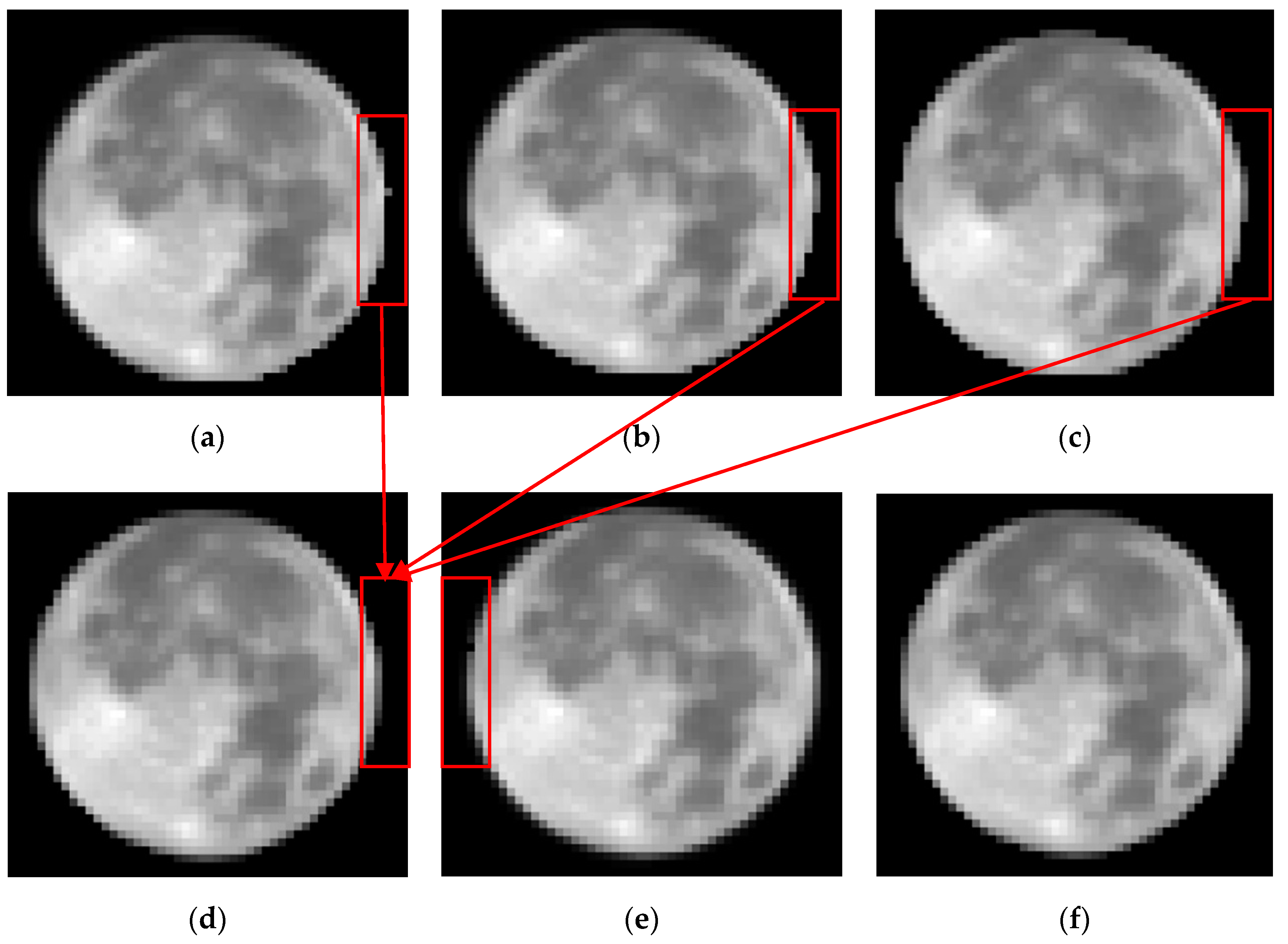
2.3. Identification of the Edge of the Moon
2.4. Determination of Lunar Irradiance
2.4.1. Correction of ROLO Model Fitting Reflectance
2.4.2. Calculation of Lunar Irradiance
2.4.3. Spectral Matching
2.4.4. Calculation of the Irradiance of Lunar Observation
2.5. Assessment Methods
3. Results
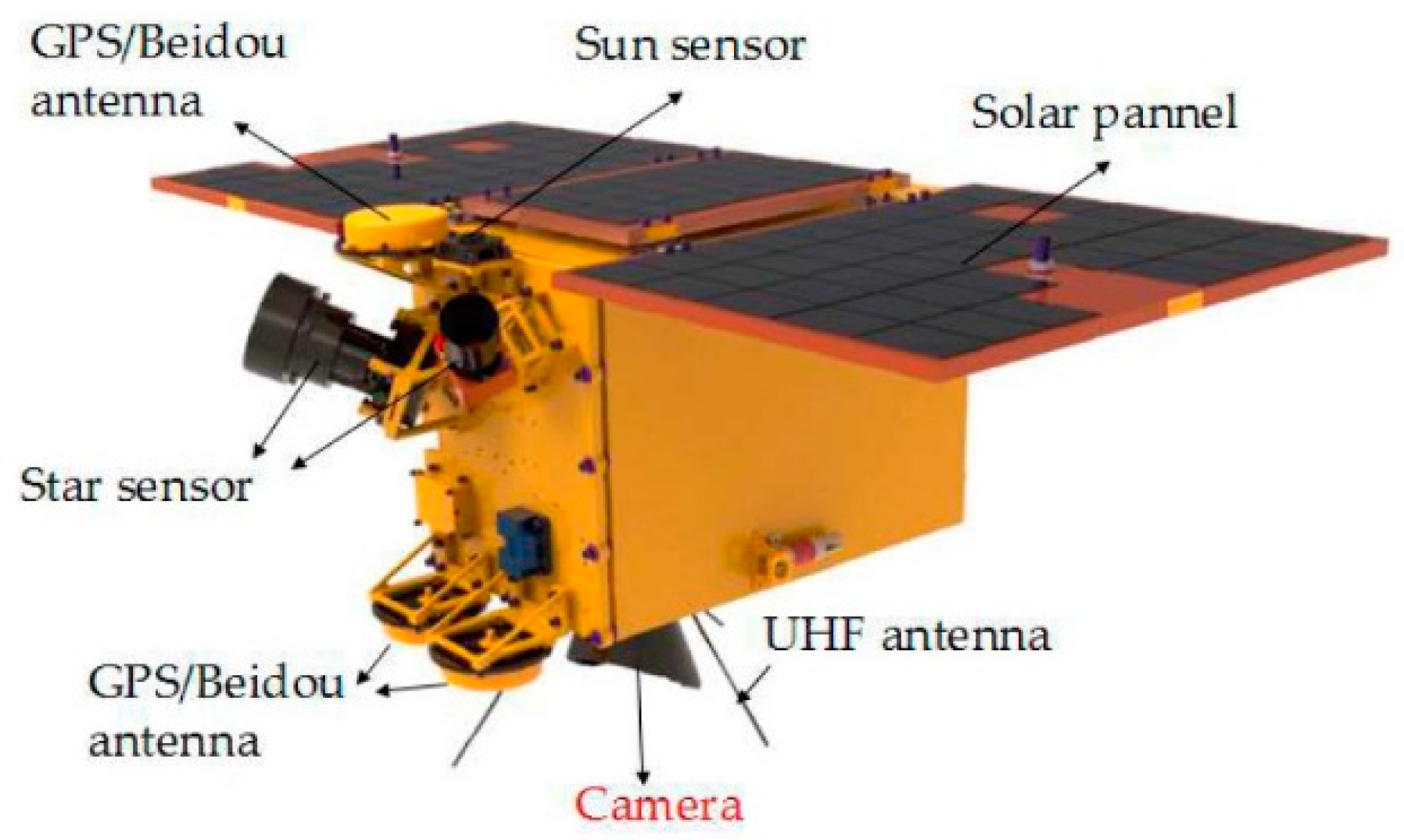
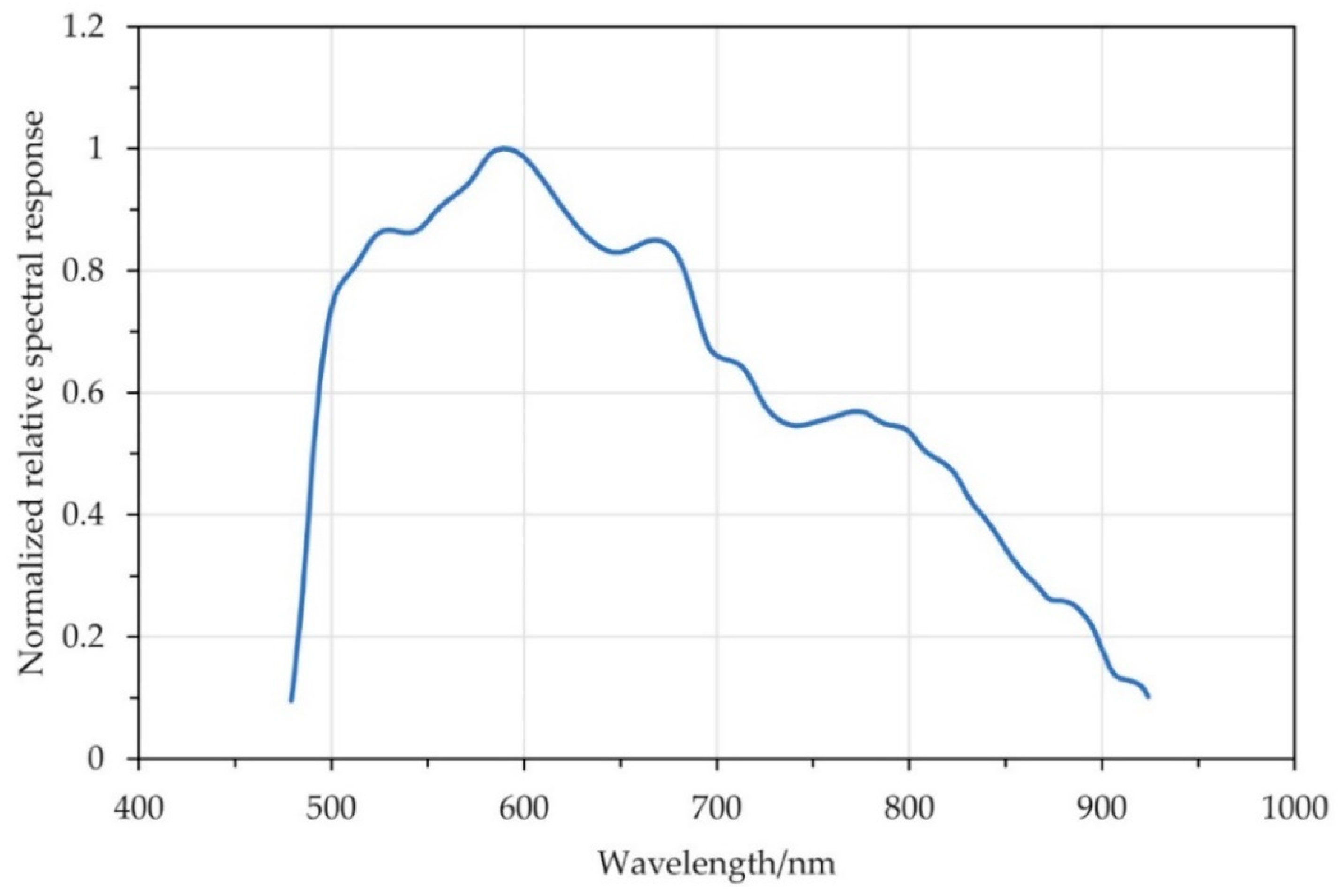
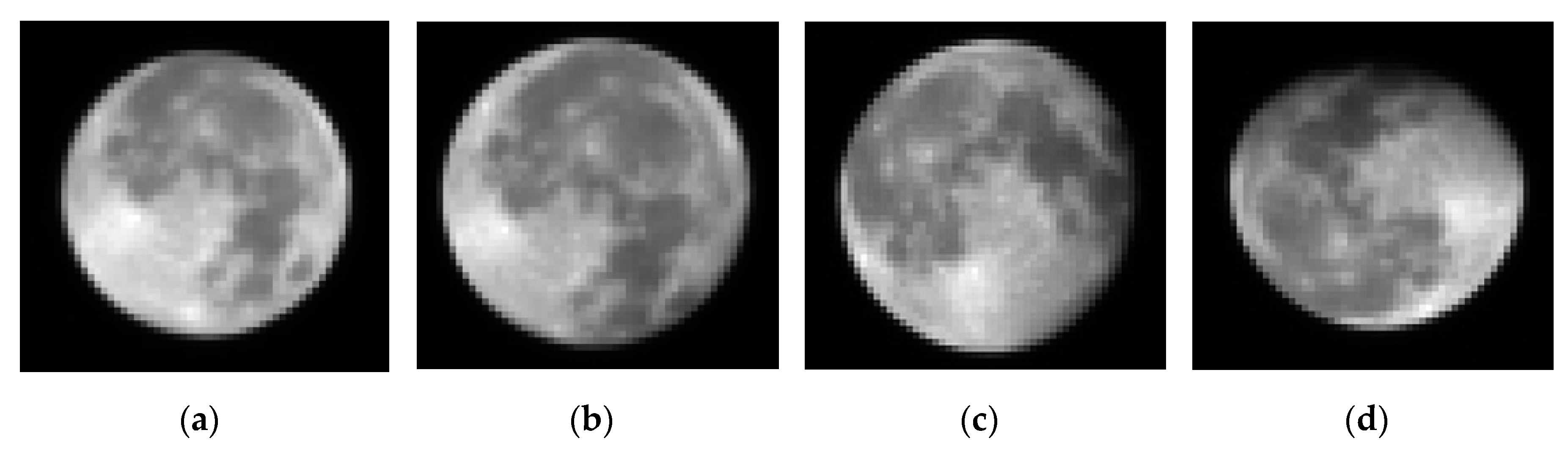
3.1. Data Introduction
3.2. Radiometric Correction
3.3. Determination of the Scope and Identification of the Edge of the Moon
3.4. Determination of Lunar Irradiance
3.5. Radiance Calibration and Sensor Stability Evaluation
4. Discussion
5. Conclusions
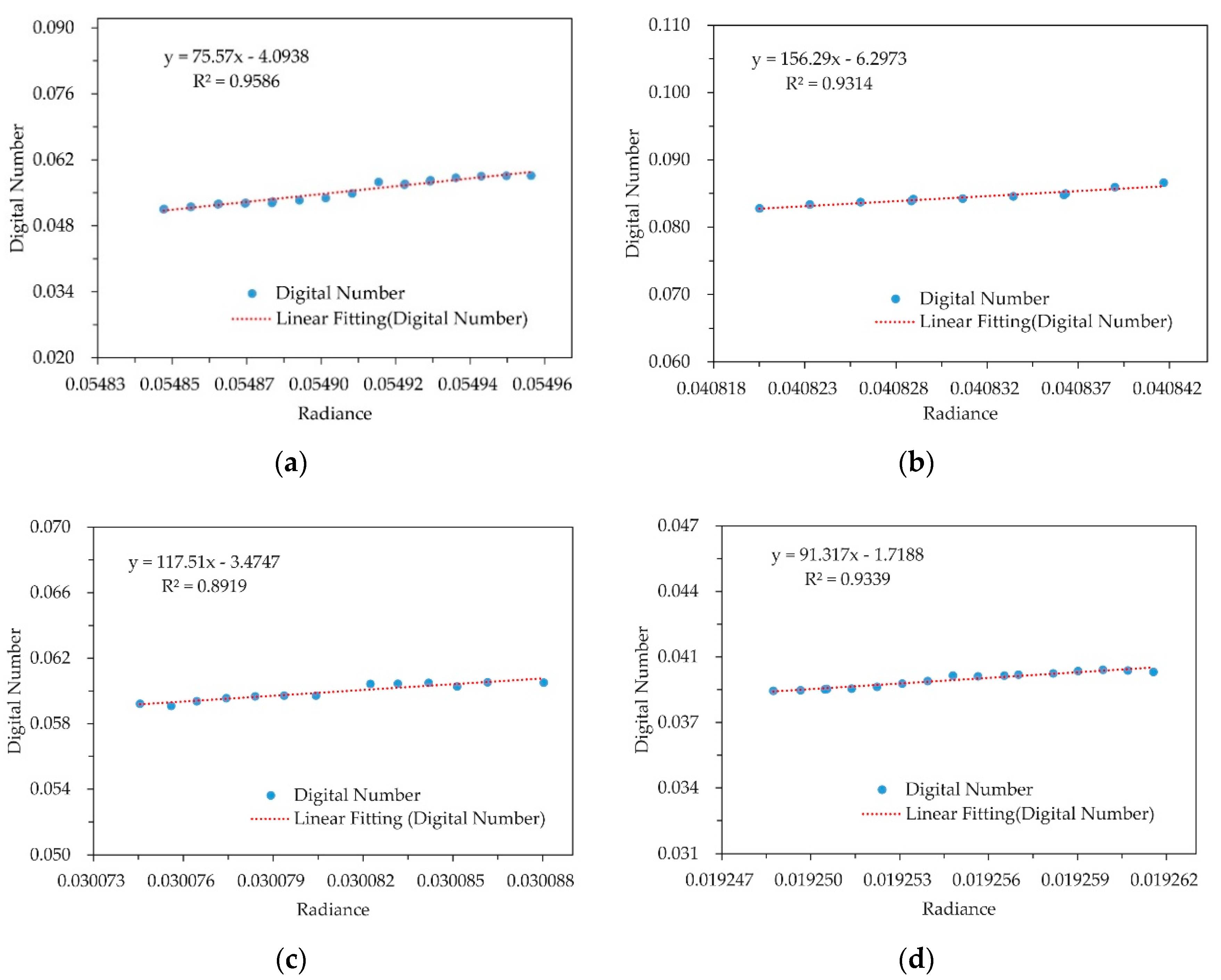
- The radiance and the DN values of the different frame images of the four datasets showed a positive linear correlation.
- The consistency of lunar observation irradiance and model irradiance of the four groups of experimental data was 100.77%, 90.35%, 94.06%, and 91.36%, respectively, all of which exceeded 90%.
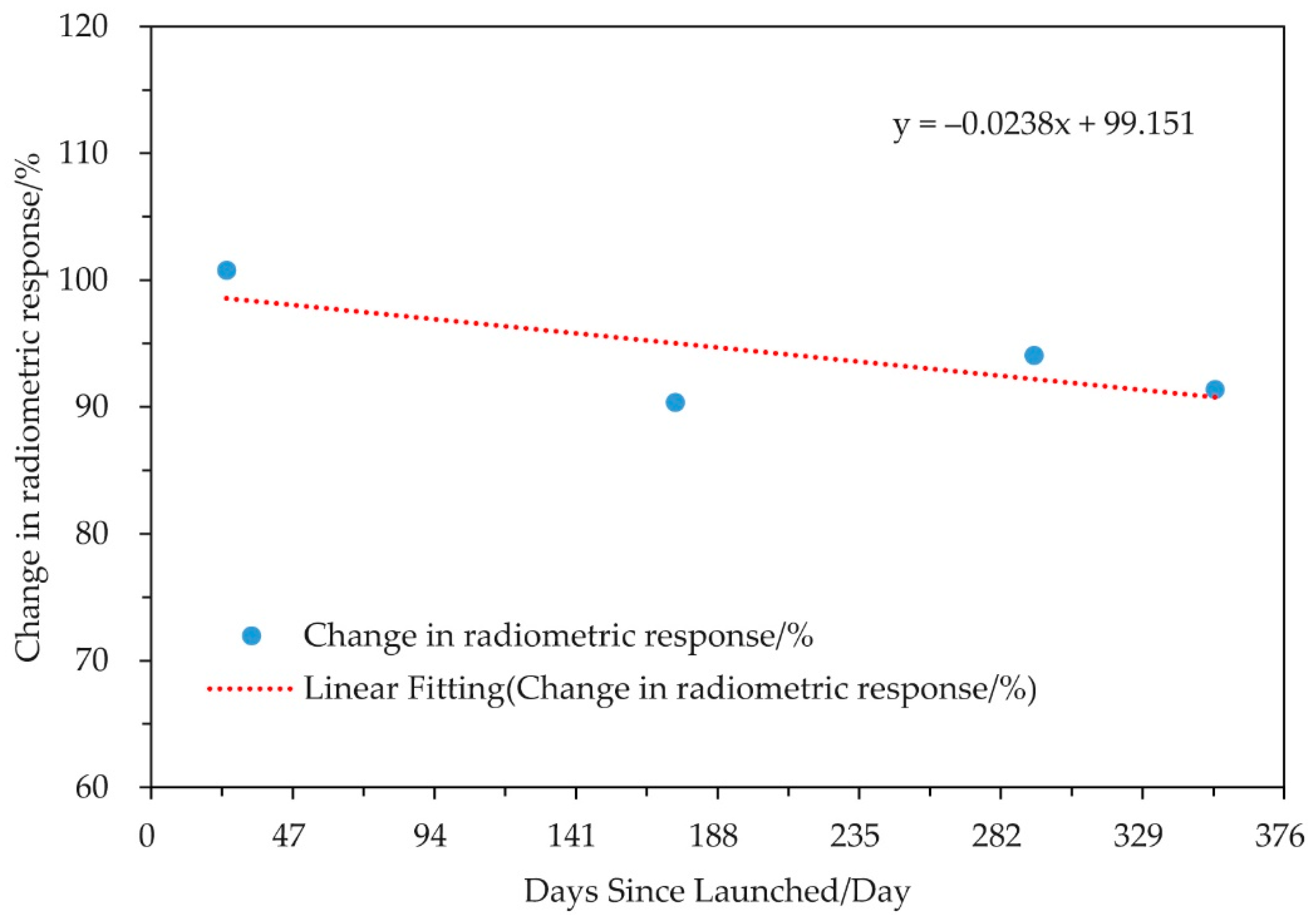
- The LuoJia1-01 spectral channel underwent obvious radiometric response degradation, which was determined to be 6.31% for nearly one year from 27 June 2018 to 21 May 2019.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zheng, Q.; Weng, Q.; Wang, K. Developing a new cross-sensor calibration model for DMSP-OLS and Suomi-NPP VIIRS night-light imageries. ISPRS J. Photogramm. Remote Sens. 2019, 153, 36–47. [Google Scholar] [CrossRef]
- Huang, X.; Schneider, A.; Friedl, M.A. Mapping sub-pixel urban expansion in China using MODIS and DMSP/OLS nighttime lights. Remote Sens. Environ. 2016, 175, 92–108. [Google Scholar] [CrossRef]
- Pandey, B.; Joshi, P.K.; Seto, K.C. Monitoring urbanization dynamics in India using DMSP/OLS night time lights and SPOT-VGT data. IJAEO 2013, 23, 49–61. [Google Scholar] [CrossRef]
- Zheng, Z.H.; Chen, Y.B.; Wu, Z.F.; Ye, X.Y.; Guo, G.H.; Qian, Q.L. The desaturation method of DMSP/OLS nighttime light data based on vector data: Taking the rapidly urbanized China as an example. Int. J. Geogr. Inf. Sci. 2019, 33, 431–453. [Google Scholar] [CrossRef]
- Ye, H.Y.; Huang, Z.Q.; Huang, L.L.; Lin, L.J.; Luo, M. Effects of urbanization on increasing heat risks in South China. Int. J. Clim. 2018, 38, 5551–5562. [Google Scholar] [CrossRef]
- Hu, T.; Huang, X. A novel locally adaptive method for modeling the spatiotemporal dynamics of global electric power consumption based on DMSP-OLS nighttime stable light data. Appl. Energy 2019, 240, 778–792. [Google Scholar] [CrossRef]
- Wang, X.; Liu, G.; Coscieme, L.; Giannetti, B.F.; Hao, Y.; Zhang, Y.; Brown, M.T. Study on the emergy-based thermodynamic geography of the Jing-Jin-Ji region: Combined multivariate statistical data with DMSP-OLS nighttime lights data. Ecol. Model. 2019, 397, 1–15. [Google Scholar] [CrossRef]
- Shi, K.F.; Yang, Q.Y.; Fang, G.L.; Yu, B.L.; Chen, Z.Q.; Yang, C.S.; Wu, J.P. Evaluating spatiotemporal patterns of urban electricity consumption within different spatial boundaries: A case study of Chongqing, China. Energy 2019, 167, 641–653. [Google Scholar] [CrossRef]
- Kumar, P.; Sajjad, H.; Joshi, P.K.; Elvidge, C.D.; Rehman, S.; Chaudhary, B.S.; Tripathy, B.R.; Singh, J.; Pipal, G. Modeling the luminous intensity of Beijing, China using DMSP-OLS night-time lights series data for estimating population density. PCE 2019, 109, 26–34. [Google Scholar] [CrossRef]
- Zhao, N.; Samson, E.L.; Liu, Y. Population bias in nighttime lights imagery. Remote Sens. Lett. 2019, 10, 913–921. [Google Scholar] [CrossRef]
- Liu, A.S.; Wei, Y.; Yu, B.L.; Song, W. Estimation of Cargo Handling Capacity of Coastal Ports in China Based on Panel Model and DMSP-OLS Nighttime Light Data. Remote Sens. 2019, 11, 582. [Google Scholar] [CrossRef]
- Zhao, J.C.; Ji, G.X.; Yue, Y.L.; Lai, Z.Z.; Chen, Y.L.; Yang, D.Y.; Yang, X.; Wang, Z. Spatio-temporal dynamics of urban residential CO2 emissions and their driving forces in China using the integrated two nighttime light datasets. Appl. Energy 2019, 235, 612–624. [Google Scholar] [CrossRef]
- Wang, S.J.; Shi, C.Y.; Fang, C.L.; Feng, K.S. Examining the spatial variations of determinants of energy-related CO2 emissions in China at the city level using Geographically Weighted Regression Model. Appl. Energy 2019, 235, 95–105. [Google Scholar] [CrossRef]
- Ouyang, Z.T.; Lin, M.M.; Chen, J.Q.; Fan, P.L.; Qian, S.S.; Park, H. Improving estimates of built-up area from night time light across globally distributed cities through hierarchical modeling. Sci. Total Environ. 2019, 647, 1266–1280. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Lin, A.W.; Zhou, Z.G. Evolution of the Pattern of Spatial Expansion of Urban Land Use in the Poyang Lake Ecological Economic Zone. Int. J. Environ. Res. Public Health 2019, 16, 117. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.Y.; Li, X.C.; Asrar, G.R.; Smith, S.J.; Imhoff, M. A global record of annual urban dynamics (1992–2013) from nighttime lights. Remote Sens. Environ. 2018, 219, 206–220. [Google Scholar] [CrossRef]
- Zhang, G.; Li, L.; Jiang, Y.; Shen, X.; Li, D. On-Orbit Relative Radiometric Calibration of the Night-Time Sensor of the LuoJia1-01 Satellite. Sensors 2018, 18, 4225. [Google Scholar] [CrossRef]
- Xiong, X.; Sun, J.; Fulbright, J.; Wang, Z.; Butler, J.J. Lunar Calibration and Performance for S-NPP VIIRS Reflective Solar Bands. ITGRS 2016, 54, 1052–1061. [Google Scholar] [CrossRef]
- Hu, S.; Ma, S.; Yan, W.; Lu, W.; Zhao, X. Feasibility of a specialized ground light source for night-time low-light calibration. Int. J. Remote Sens. 2018, 39, 2543–2559. [Google Scholar] [CrossRef]
- Kieffer, H.H. Photometric Stability of the Lunar Surface. Icarus 1997, 130, 323–327. [Google Scholar] [CrossRef]
- Kadowaki, N.; Larouche, M.; Girard, F.; Grandmont, F.; Veilleux, J.; Taylor, J.; Bourque, H.; Moreau, L. Instrument demonstration effort for the CLARREO mission. In Proceedings of the International Conference on Space Optics—ICSO 2010, Rhodes Island, Greece, 4–8 October 2010. [Google Scholar] [CrossRef]
- Karafolas, N.; Sodnik, Z.; Cugny, B.; Barnes, A.; Lobb, D.; Smith, D.; Russell, J.; Brindley, H.; Green, P.; Fox, N.; et al. Traceable radiometry underpinning terrestrial and heliostudies (truths): A bencmark mission for climate. In Proceedings of the International Conference on Space Optics—ICSO 2014, Tenerife, Spain, 6–10 October 2014. [Google Scholar] [CrossRef]
- Kieffer, H.H.; Stone, T.C. The Spectral Irradiance of the Moon. Astron. J. 2007, 129, 2887–2901. [Google Scholar] [CrossRef]
- Cao, C.; Bai, Y.; Wang, W.; Choi, T. Radiometric Inter-Consistency of VIIRS DNB on Suomi NPP and NOAA-20 from Observations of Reflected Lunar Lights over Deep Convective Clouds. Remote Sens. 2019, 11, 934. [Google Scholar] [CrossRef]
- Barreto, A.; Cuevas, E.; Damiri, B.; Guirado, C.; Berkoff, T.; Berjón, A.J.; Hernández, Y.; Almansa, F.; Gil, M. A new method for nocturnal aerosol measurements with a lunar photometer prototype. Atmos. Meas. Tech. 2013, 6, 585–598. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, P.; Hu, X.Q.; Chen, L.; Wang, Y.; Wang, W. Comparison of lunar irradiance models and validation of lunar observation on Earth. J. Remote Sens. 2017, 21, 864–870. [Google Scholar] [CrossRef]
- Grant, I.F.; Kieffer, H.H.; Stone, T.C.; Anderson, J.M. Lunar calibration of the GMS-5 visible band. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9–13 July 2001. [Google Scholar] [CrossRef]
- Fujisada, H.; Grant, I.F.; Kieffer, H.H.; Anderson, J.M. Lunar calibration of geostationary visible-band imagers. In Proceedings of the Sensors, Systems, and Next-Generation Satellites II, Barcelona, Spain, 21 December 1998. [Google Scholar] [CrossRef]
- Butler, J.J.; Wu, X.; Xiong, J.; Stone, T.C.; Yu, F.; Han, D. Vicarious calibration of GOES Imager visible channel using the Moon. In Proceedings of the Earth Observing Systems XI, San Diego, CA, USA, 14–16 August 2006. [Google Scholar] [CrossRef]
- Barnes, W.L.; Maxwell, M.S.; Kieffer, H.H. Calibrating the GOES Imager visible channel using the moon as an irradiance source. In Proceedings of the Earth Observing Systems III, San Diego, CA, USA, 3 October 1998. [Google Scholar] [CrossRef]
- Stone, T.C.; Butler, J.J.; Kieffer, H.H.; Grant, I.F. Potential for calibration of geostationary meteorological imagers using the Moon. In Proceedings of the Earth Observing Systems X, San Diego, CA, USA, 31 July 2005. [Google Scholar] [CrossRef]
- Butler, J.J.; Sun, J.; Xiong, X.; Butler, J.; Gu, X. NPP VIIRS on-orbit calibration and characterization using the moon. In Proceedings of the Earth Observing Systems XVII, San Diego, CA, USA, 15 October 2012. [Google Scholar] [CrossRef]
- Butler, J.J.; Xiong, X.; Gu, X.; Fulbright, J.P.; Wang, Z.; Xiong, X. Suomi-NPP VIIRS lunar radiometric calibration observations. In Proceedings of the Earth Observing Systems XIX, San Diego, CA, USA, 26 September 2014. [Google Scholar] [CrossRef]
- Butler, J.J.; Xiong, X.; Gu, X.; Wang, Z.; Fulbright, J.; Xiong, X. Update on the performance of Suomi-NPP VIIRS lunar calibration. In Proceedings of the Earth Observing Systems XX, San Diego, CA, USA, 8 September 2015. [Google Scholar] [CrossRef]
- Butler, J.J.; Xiong, X.; Gu, X.; Wang, Z.; Xiong, X.; Efremova, B.V.; Chen, H. Using the Moon to evaluate the radiometric calibration performance of S-NPP VIIRS thermal emissive bands. In Proceedings of the Earth Observing Systems XIX, San Diego, CA, USA, 18–20 August 2014. [Google Scholar] [CrossRef]
- Lv, Y.; Le, J.; Chen, H.; Wang, J.; Shao, J.; Hu, S.; Ma, S.; Yan, W.; Huang, Y. Using two different targets for the calibration of S-NPP VIIRS day night band under lunar illumination. In Proceedings of the Selected Papers of the Chinese Society for Optical Engineering Conferences held October and November 2016, Jinhua, China, 8 March 2017. [Google Scholar] [CrossRef]
- Meynart, R.; Neeck, S.P.; Shimoda, H.; Xiong, X.; Lachérade, S.; Aznay, O.; Fougnie, B.; Fulbright, J.; Wang, Z. Comparison of S-NPP VIIRS and PLEIADES lunar observations. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XIX, Toulouse, France, 12 October 2015. [Google Scholar] [CrossRef]
- Wang, Z.; Xiong, X.; Li, Y. Improved Band-to-Band Registration Characterization for VIIRS Reflective Solar Bands Based on Lunar Observations. Remote Sens. 2015, 8, 27. [Google Scholar] [CrossRef]
- Li, X.; Ma, R.; Zhang, Q.; Li, D.; Liu, S.; He, T.; Zhao, L. Anisotropic characteristic of artificial light at night—Systematic investigation with VIIRS DNB multi-temporal observations. Remote Sens. Environ. 2019, 233, 111357. [Google Scholar] [CrossRef]
- Barnes, W.L.; Eplee, J.R.E.; Butler, J.J.; Barnes, R.A.; Patt, F.S.; Meister, G.; McClain, C.R. SeaWiFS lunar calibration methodology after six years on orbit. In Proceedings of the Earth Observing Systems IX, Denver, CO, USA, 26 October 2004. [Google Scholar] [CrossRef]
- Butler, J.J.; Eplee, J.R.E.; Xiong, J.; Bailey, S.W.; Barnes, R.A.; Kieffer, H.H.; McClain, C.R. Comparison of SeaWiFS on-orbit lunar and vicarious calibrations. In Proceedings of the Earth Observing Systems XI, San Diego, CA, USA, 7 September 2006. [Google Scholar] [CrossRef]
- Butler, J.J.; Sun, J.; Xiong, J.; Eplee, J.R.E.; Xiong, X.; Stone, T.; Meister, G.; McClain, C.R. MODIS and SeaWIFS on-orbit lunar calibration. In Proceedings of the Earth Observing Systems XIII, San Diego, CA, USA, 20 August 2008. [Google Scholar] [CrossRef]
- Barnes, R.A.; Eplee, R.E.; Patt, F.S.; Kieffer, H.H.; Stone, T.C.; Meister, G.; Butler, J.J.; McClain, C.R. Comparison of SeaWiFS measurements of the Moon with the U.S. Geological Survey lunar model. Appl. Optics 2004, 43, 5838–5854. [Google Scholar] [CrossRef]
- Sun, J.-Q.; Xiong, X.; Barnes, W.L.; Guenther, B. MODIS Reflective Solar Bands on-Orbit Lunar Calibration. ITGRS 2007, 45, 2383–2393. [Google Scholar] [CrossRef]
- Wu, R.H.; Zhang, P.; Yang, Z.D.; Hu, X.Q.; Ding, L.; Chen, L. Monitor radiance calibration of the remote sensing instrument with reflected lunar irradiance. J. Remote Sens. 2015, 20, 278–289. [Google Scholar] [CrossRef]
- Niu, M.H.; Chen, F.C.; Chen, G.L. Study on Lunar Calibration for Visible Channel of Geostationary Remote Sensing Radiometer. Chin. J. Quantum Electron. 2019, 36, 108–115. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Wang, S.; Li, Z.; Zhang, Z.; Hu, X.; Zhang, P. Ground-based Observation System Development for the Moon Hyper-spectral Imaging. PASP 2017, 129, 13. [Google Scholar] [CrossRef]
- Su, Z.; Zhong, X.; Zhang, G.; Li, Y.; He, X.; Wang, Q.; Wei, Z.; He, C.; Li, D. High Sensitive Night-time Light Imaging Camera Design and In-orbit Test of Luojia1-01 Satellite. Sensors 2019, 19, 797. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Zhong, X.; Zhang, G.; Li, D.; Su, Z.; Meng, Y.; Jiang, Y. Thermal Stability Optimization of the Luojia 1-01 Nighttime Light Remote-Sensing Camera’s Principal Distance. Sensors 2019, 19, 990. [Google Scholar] [CrossRef] [PubMed]
- Velikodsky, Y.I.; Opanasenko, N.V.; Akimov, L.A.; Korokhin, V.V.; Shkuratov, Y.G.; Kaydash, V.G.; Videen, G.; Ehgamberdiev, S.A.; Berdalieva, N.E. New Earth-based absolute photometry of the Moon. Icarus 2011, 214, 30–45. [Google Scholar] [CrossRef]
- Butler, J.J.; Stone, T.C.; Xiong, J.; Kieffer, H.H. Use of the Moon to support on-orbit sensor calibration for climate change measurements. In Proceedings of the Earth Observing Systems XI, San Diego, CA, USA, 8 September 2006. [Google Scholar] [CrossRef]
- Govaerts, Y.M.; Clerici, M.; Clerbaux, N. Operational calibration of the Meteosat radiometer VIS band. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1900–1914. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Parameter | Value |
|---|---|
| Number of active detectors | 2048 × 2048 |
| Detector size | 11 µm × 11 µm |
| Imaging mode | Standard (STD) mode High dynamic range (HDR) mode |
| Spectral range | 460–980 nm |
| Resolution | 129 m |
| Shutter type | Electronic rolling |
| Quantization bits | 12-bit, processing to 15bit |
| Frame rate | 24 fps @HDR mode 48 fps @STD mode |
| Noise Equivalent Radiance | 5e−5 W/m2/sr |
| Orbit Number | Frame | Imaging Time (UTC) | Exposure Time (ms) | Gain | Frame Time (s) | Spacecraft Height (km) | Phase Angle (°) |
|---|---|---|---|---|---|---|---|
| 53 | 146 | 2018-6-27T 23:43:35.1291 | 0.05 | 0.60 | 0.10 | 655.49 | 2.83 |
| 237 | 73 | 2018-11-23T 22:45:5.187615 | 0.05 | 1.29 | 0.10 | 644.01 | 10.57 |
| 217 | 146 | 2019-3-22T 17:40:30.16378 | 0.05 | 1.29 | 0.10 | 635.95 | 24.30 |
| 354 | 146 | 2019-5-21T 15:3:0.148440 | 0.05 | 1.29 | 0.10 | 662.68 | 33.86 |
| Observe Data | 53 | 237 | 217 | 354 |
|---|---|---|---|---|
| Observing Time (UTC) | 2018-6-27T 23:43:23 | 2018-11-23T 22:45:5 | 2019-3-22T 17:40:18 | 2019-5-21T 15:03:00 |
| Spacecraft position X (J2000,km) | −1372.54 | 2067.28 | −5952.30 | −2341.16 |
| Spacecraft position Y (J2000,km) | −1335.73 | 583.59 | 2538.92 | −3014.05 |
| Spacecraft position Z (J2000,km) | 6747.30 | 6665.14 | 2697.62 | −5898.73 |
| Selenographic longitude of the spacecraft (°) | 36.48 | 161.73 | 130.48 | 155.94 |
| Selenographic latitude of the spacecraft (°) | 73.51 | 55.78 | 13.00 | −35.78 |
| Selenographic longitude of the sun (°) | 4.47 | −12.90 | −17.91 | −28.52 |
| Selenographic latitude of the sun (°) | −0.81 | 1.32 | −1.44 | −1.17 |
| Moon–Sun distance (AU) | 1.02 | 0.99 | 1.00 | 1.01 |
| Adjusted distance factor | 1.16 | 0.89 | 0.89 | 1.04 |
| Phase (°) | 2.83 | 10.57 | 24.30 | 33.86 |
| Semi-major axis | 44 | 46 | 48 | 44 |
| Semi-minor axis | 44 | 46 | 48 | 44 |
| Oversample factor | 1 | 1 | 1 | 1 |
| Number of pixels summed | 1750 | 1681 | 1964 | 1541 |
| Pixel solid angle (sr) | 4*10−8 | 4*10−8 | 4*10−8 | 4*10−8 |
| Orbit Number | 53 | 237 | 217 | 354 |
|---|---|---|---|---|
| The accuracy of lunar calibration/% | 100.77 | 90.35 | 94.05 | 91.36 |
| The standard deviation of calibration results of each dataset/% | 1.39 | 1.08 | 0.56 | 0.20 |
| Days Since Launched | 25 | 174 | 293 | 353 |
|---|---|---|---|---|
| Change in radiometric response/% | 100.77 | 90.35 | 94.06 | 91.36 |
| Relative change in radiometric response/% | 100.00 | 89.66 | 93.34 | 90.67 |
| Change in radiometric response/% (Phase adjusted) | 97.99 | 95.67 | 93.29 | 92.09 |
| Relative change in radiometric response/% (Phase adjusted) | 100.00 | 98.39 | 95.54 | 93.56 |
| Wavelength (nm) | 350 | 355.1 | 405 | 412.3 | 414.4 | 441.6 | 465.8 | 475 |
| BandWidth (nm) | 32.5 | 31.6 | 16.2 | 12.5 | 17.8 | 9.6 | 20 | 18.4 |
| Wavelength (nm) | 486.9 | 544 | 549.1 | 553.8 | 665.1 | 693.1 | 703.6 | 745.3 |
| BandWidth (nm) | 7.9 | 18.8 | 8.7 | 18.1 | 8.3 | 16.8 | 16.7 | 8.7 |
| Wavelength (nm) | 763.7 | 774.8 | 865.3 | 872.6 | 882 | 928.4 | 939.3 | 942.1 |
| BandWidth (nm) | 16.8 | 16.9 | 13.9 | 18.4 | 16 | 17.6 | 18.8 | 21.5 |
| Wavelength (nm) | 1059.5 | 1243.2 | 1538.7 | 1633.6 | 1981.5 | 2126.3 | 2250.9 | 2383.6 |
| BandWidth (nm) | 27.1 | 23.3 | 48.6 | 23.4 | 38.5 | 54.7 | 48.2 | 58.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Shi, Y.; Li, L.; Xu, M.; Zeng, W.; Jiang, Y.; Li, Z. On-Orbit Radiance Calibration of Nighttime Sensor of LuoJia1-01 Satellite Based on Lunar Observations. Remote Sens. 2019, 11, 2183. https://doi.org/10.3390/rs11182183
Jiang Y, Shi Y, Li L, Xu M, Zeng W, Jiang Y, Li Z. On-Orbit Radiance Calibration of Nighttime Sensor of LuoJia1-01 Satellite Based on Lunar Observations. Remote Sensing. 2019; 11(18):2183. https://doi.org/10.3390/rs11182183
Chicago/Turabian StyleJiang, Yonghua, Yingrui Shi, Litao Li, Miaozhong Xu, Wenzhi Zeng, Yang Jiang, and Zhen Li. 2019. "On-Orbit Radiance Calibration of Nighttime Sensor of LuoJia1-01 Satellite Based on Lunar Observations" Remote Sensing 11, no. 18: 2183. https://doi.org/10.3390/rs11182183
APA StyleJiang, Y., Shi, Y., Li, L., Xu, M., Zeng, W., Jiang, Y., & Li, Z. (2019). On-Orbit Radiance Calibration of Nighttime Sensor of LuoJia1-01 Satellite Based on Lunar Observations. Remote Sensing, 11(18), 2183. https://doi.org/10.3390/rs11182183