1. Introduction
The spaceborne laser altimeter, as an important instrument for earth observation, is of great significance for global ecosystem observation and for glacier and lake research [
1,
2,
3,
4,
5,
6]. Following the Geoscience Laser Altimeter System (GLAS) of the Ice, Cloud and Land Elevation Satellite (ICESat) [
7], which was a single-beam instrument that recorded the received laser energy as a waveform, the National Aeronautics and Space Administration (NASA) launched the Ice, Cloud and Land Elevation Satellite-2 ICESat-2 satellite on 15 September 2018 [
8,
9]. ICESat-2 is equipped with the Advanced Topographic Laser Altimeter System (ATLAS), which is a laser characterized by being micro-pulse, multi-beam, high repetition frequency and photon-counting. It has a ~17 m diameter footprint, and its high-frequency laser pulses can produce 0.7 m interval footprints along the track, which can form a relatively dense terrain profile. Key ICESat-2/ATLAS performance specifications are listed in
Table 1 [
10]. A pointing knowledge of 6.5 m after post-processing is required, which will cause an elevation error of 0.5 m over slopes of 5°. ATLAS will form three pairs of tracks in the cross-track direction, and each pair has two beams with an interval of ~90 m. ICESat-2 needs to control the beam position to less than half the pair separation to interpolate to the reference ground tracks (RGTs), so a pointing control of ≤45 m is required. The adjacent pairs are ~3 km apart.
Figure 1 shows the beam pattern on the ground [
10]. The photon-counting laser altimeter has outstanding advantages in complex topography measurement and can significantly improve the resolution along the track [
11,
12], which is quite different from traditional laser altimeters, such as the GLAS system. However, there is little found in the literature on the subject of pointing angle calibration based on terrain matching for this kind of spaceborne laser altimeter.
Laser pointing accuracy has an important impact on the geolocation and elevation of the footprints, e.g., for the 500 km orbital altitude, 2.4 m of horizontal geolocation error will be caused with 1 arc-second of pointing error. When the local terrain has slopes, additional elevation errors will be introduced, e.g., for the GLAS system, there will be 10 cm of elevation error with 2 degrees of slope and 1 arc-second of pointing error [
13]. In addition, the motion of the spacecraft about the Earth at a 600 km altitude with a circular orbit will lead to laser aberration [
14]. The laser footprints after post-processing may deviate from the reference track by 200 m [
15]. When the hardware condition of the satellite platform is limited, the deviation value may be several kilometers [
16]. Therefore, the question of how to calibrate the laser pointing angle is one of the fundamental but critical problems in spaceborne laser altimeter measurement.
In order to improve the laser pointing accuracy, many methods have been applied to the existing spaceborne laser altimeter. In terms of hardware, star sensors and cameras were used to detect the direction of laser emission in the GLAS system [
17]. Meanwhile, many methods for laser pointing angle calibration have been developed [
18]. For example, the range-residual calibration method was used, and it commanded that the spacecraft maneuver over the ocean and the range residuals were used to recover the pointing and range biases [
19]. Some methods have used known topography to calibrate the spaceborne laser altimeter [
16,
20,
21,
22,
23,
24], and there have also been some methods to perform the calibration by analyzing the laser echo waveform [
18]. A more direct kind of calibration method was performed by using the ground calibration site; a large number of sensor arrays were arranged in the site to measure the laser footprints, and the light spot center position was comprehensively analyzed to calibrate the pointing angle [
25,
26]. Another direct measurement method used an airborne infrared camera to take photos of the laser footprints on the ground as the satellite passed by, and then footprint location was estimated [
24]. Some scholars have proposed the calibration method of the weight matrix [
27]. However, the in-orbit maneuvering method requires the satellite platform to have a high attitude control ability, which generally needs to be carried out on a flat sea surface; however, quite a lot of measurements occur on an uneven land surface [
23]. The calibration method based on the echo waveform can only be used for a full waveform laser altimeter. Furthermore, using an airborne infrared camera to photograph a spot on the ground requires artificial landmarks for nighttime photography; in the daytime, the signal-to-noise ratio is reduced due to the influence of sunlight. At the same time, it is very challenging to take photos of the light spot on the ground at a specific time with an onboard camera. Although the method of setting up the ground calibration site can accurately measure the spot position, the measurement process is relatively tedious, and when the rough laser pointing direction is not known, it brings certain difficulties to the selection and setting of the calibration site.
Terrain-based calibration methods have a wide range of application scenarios. In addition to its application in the calibration of spaceborne laser altimeters, this kind of method is also applied in terrain aided navigation [
28] and satellite image matching [
29,
30]. It has low requirements for the site; with the popularization of airborne laser measurement equipment, we can conveniently obtain local high-precision terrain. Meanwhile, terrain surveyed by airborne lidar will also be used as a reference in the post-launch verification of ICESat-2 [
31]: researchers from the University of Maryland conducted 11 km of measurement in Greenland with ground GPS equipment, and the measurement results were used to evaluate the accuracy of airborne lidar [
31]. During 2017–2018, Maryland researchers also measured 750 km of 88S Traverse data in Antarctica, which will also be used to verify the measurement accuracy of airborne altimetry and the satellite-borne laser altimeter. The results of their study verify that the elevation biases for the airborne data range from −9.5 cm to 3.6 cm, while surface measurement precisions are equal to or better than 14.1 cm, which are appropriate for the validation of ICESat-2 surface elevation data [
21]. Unlike the calibration of GLAS, which requires a wide range of terrain, using a small range of high-precision terrain for the calibration of ICESat-2 would be a promising approach.
In this paper, a pointing angle calibration method for the spaceborne photon-counting altimeter based on small-range airborne topographic survey data is studied. The purpose is to achieve high-precision calibration of the laser pointing angle using only topographic data in a small range, without further methods such as specially designed calibration sites. At the same time, aiming at the problem of the long calibration time of the traditional calibration method, a novel, fast, iterative calibration method is proposed.
2. Materials and Methods
2.1. Experimental Data
The experimental data came from the McMurdo Dry Valleys in Antarctica. The surface of this terrain is shown in
Figure 2.
Although the McMurdo Dry Valleys are in Antarctica, there is little ice and no vegetation because of the harsh climate in this area. The elevation difference in this area is about 1000 m, and the undulating topography is conducive to calibration based on terrain matching. Our study is based on three parts of data from the above regions, including (1) terrain precisely surveyed by airborne lidar; (2) the simulated spaceborne photon-counting lidar data and (3) the ICESat-2 data.
(1) The terrain precisely surveyed by airborne lidar data. The lidar data for the experimental area were derived from the high-precision airborne lidar data
“2014–2015 lidar survey of the McMurdo Dry Valleys” [
32] provided by the
OpenTopography platform [
33]. The dataset was measured during the southern hemisphere summer of 2014 to 2015 and collected with the
Optech Titan Multispectral sensor. The lidar point density varied from 2 to 10 pts/m
2 with an average of about 5 pts/m
2. The vertical and horizontal accuracies are estimated to be 0.07 m and 0.03 m, respectively. In our experiment, horizontal 1 m resolution Digital Elevation Model (DEM) data were generated based on the lidar data to serve as the matching terrain for the subsequent calibration.
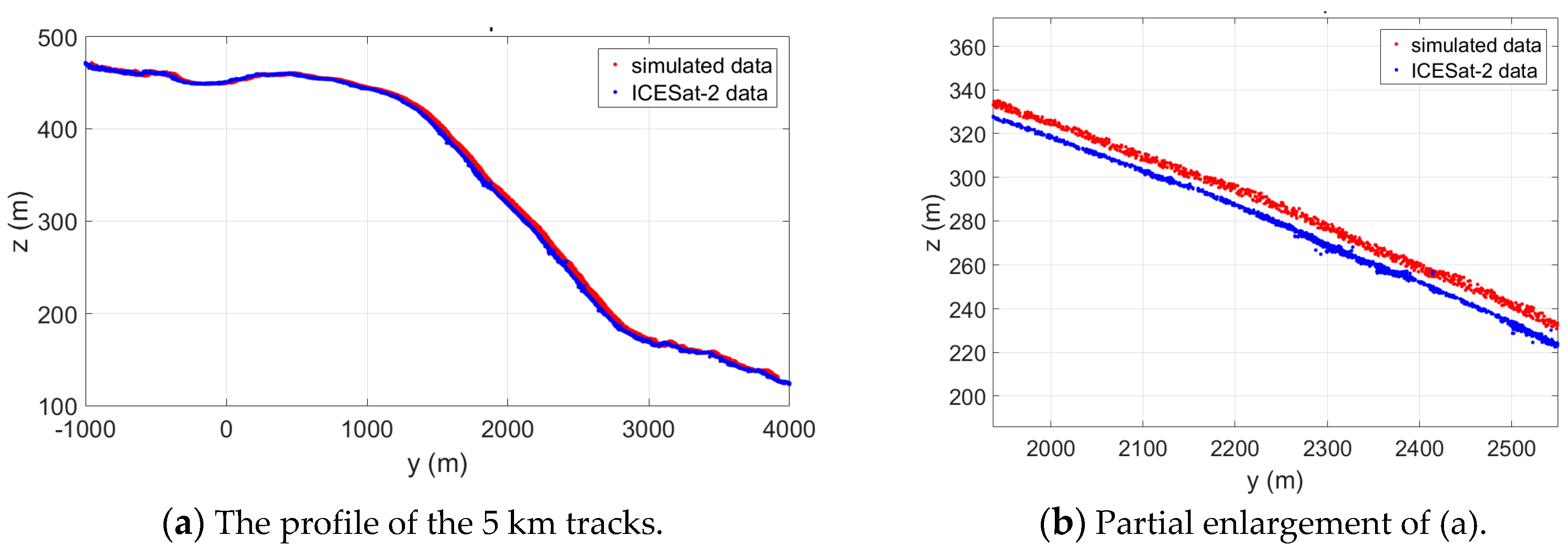
(2) The simulated spaceborne photon count lidar data. The simulated spaceborne laser altimeter data were calculated from the previous lidar data. The simulation algorithm was based on the methods used in reference [
3,
5], and our simulation steps are shown in
Figure 3.
Step 1: Searching the laser footprints area. In order to simulate the echo photon of a laser shot, we first needed to determine its illumination area on the lidar data. With the known satellite position, attitude and theoretical laser pointing angle, the rough area of the laser footprints on the lidar data (green area) was estimated, and then all lidar points within the laser divergence radius were further extracted (red area).
Step 2: Generating the probability distribution function (PDF). According to the lidar points extracted in Step 1, the PDF of the elevation distribution was generated. The vertical axis is the elevation from the lowest point to the highest point, and the horizontal axis is the probability distribution of each elevation.
Step 3: Weighted random sampling. Due to the randomness of the return photon’s position in the footprint, we also used the probability method to determine the measured photon. Firstly, the number of return photons for an outgoing laser pulse needed to be determined. For the photon-counting laser altimeter, the number of detected photons associated with each shot is a function of the transmitted laser energy, surface reflectance, scattering and attenuation in the atmosphere. The predicted number of return photons received per shot for an ice sheet surface was 0.6–12, and there will be 1/3–1/9 as many photons returned from terrestrial surfaces as from ice and snow surfaces [
10]. Here, the number of return photons, N, within the current footprint was generated randomly, ranging from 0 to 2. Secondly, the generated elevation PDF was used as the weight to randomly sample the elevation range, and an elevation value was obtained. This value was the final simulated elevation of the current footprint. Thirdly, the laser ranging value was obtained by the inverse solution of the geometric relationship of the laser altimeter. This weighted sampling process was repeated N times to obtain N results.
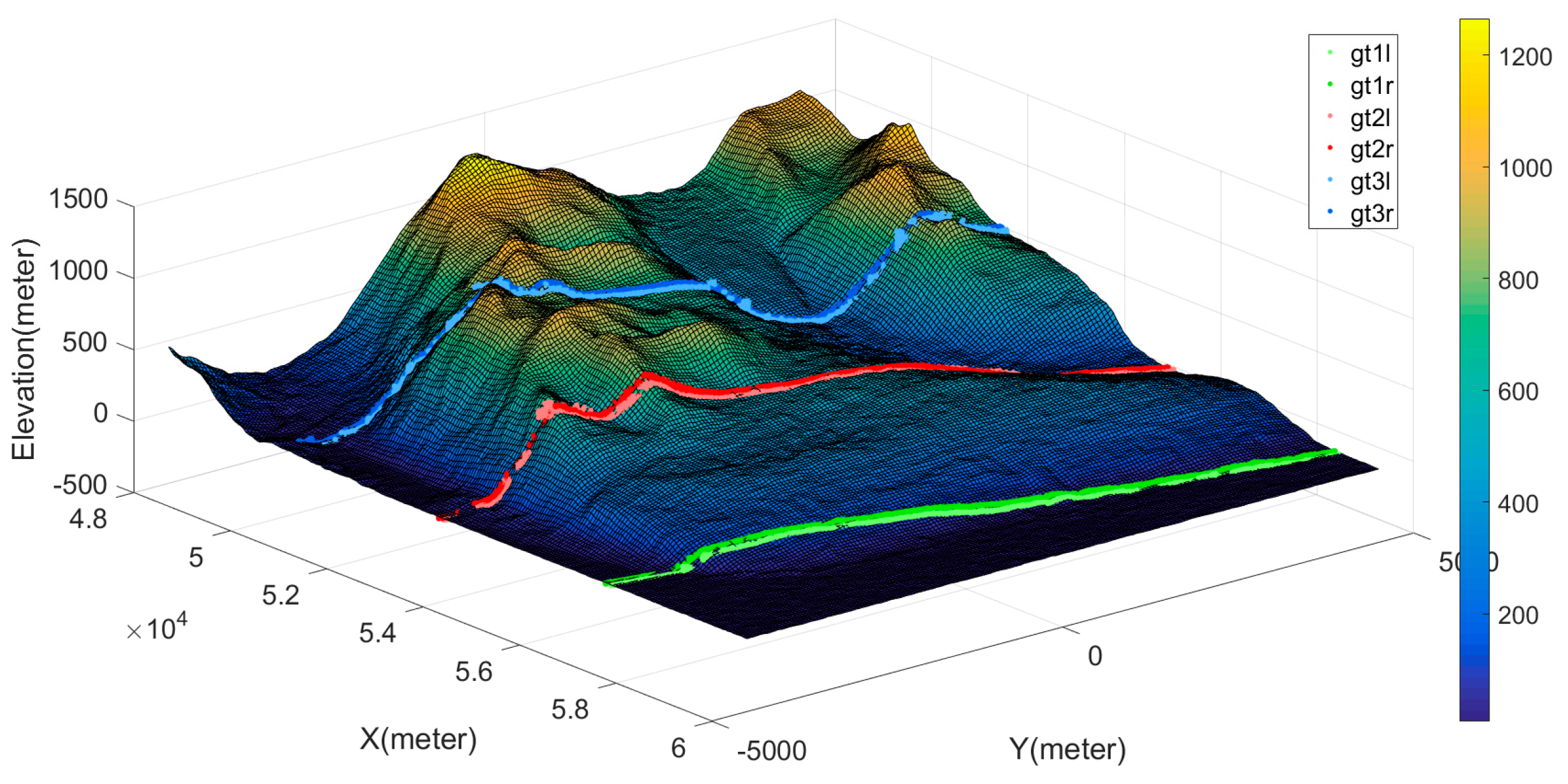
(3) The ICESat-2 data. The ICESat-2 data surveyed near McMurdo Dry Valleys on 2 November 2018 [
34] were used in this paper. The Track ID is 534. The ground tracks of the data are shown in
Figure 4, which contain three pairs of footprints. gt3r, gt2r and gt1r are the strong beams, whose energy is about four times that of the weak beams.
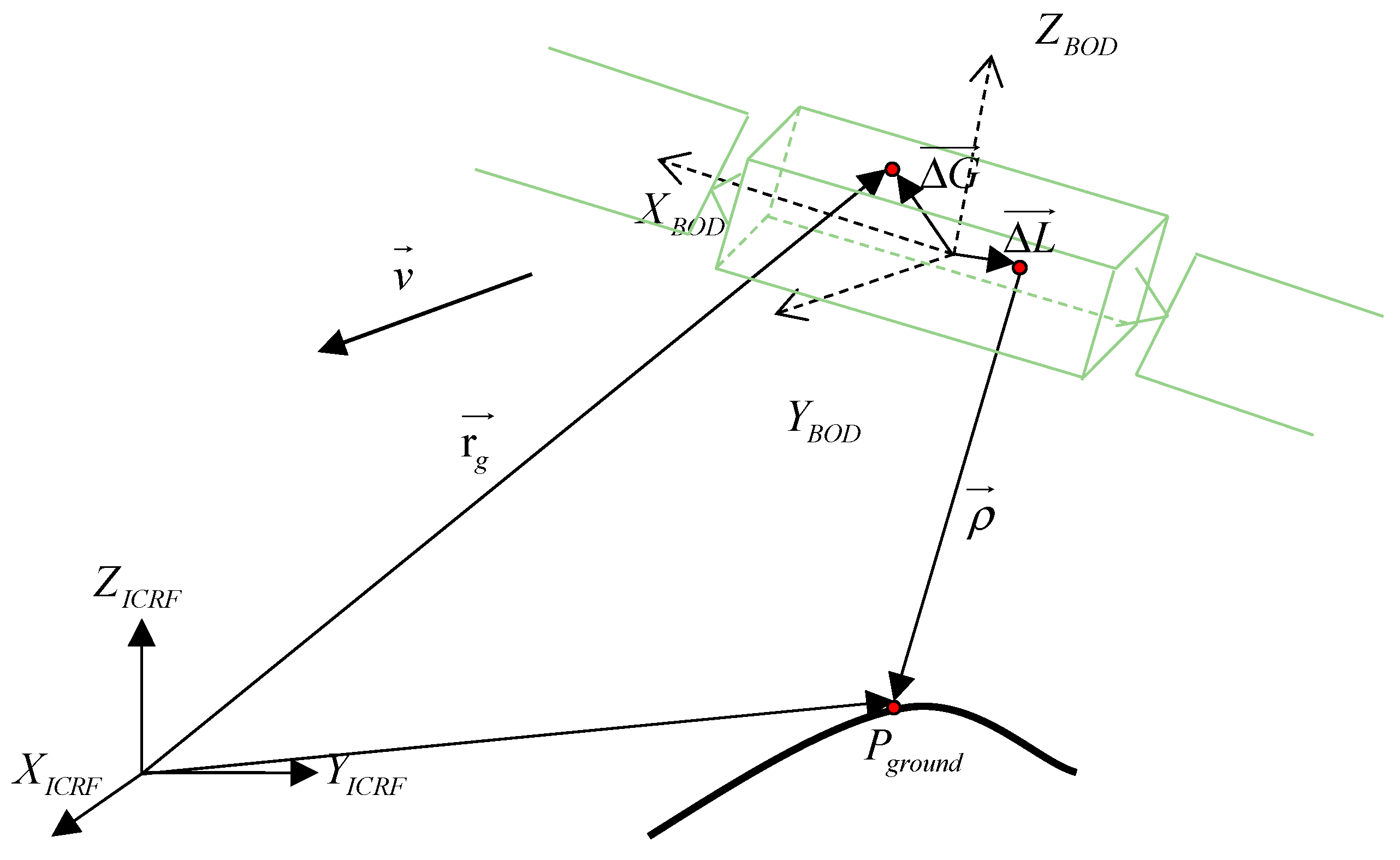
2.2. Pointing Angle Error Geometric Model
A geometric model of the spaceborne laser altimeter [
25,
35] is shown in
Figure 5. Within this model,
is the coordinate system of the satellite body,
is the offset of the GPS antenna in the satellite body coordinate,
is the laser fire point in the satellite coordinate,
represents the international celestial reference frame (ICRF) coordinate system,
is the position vector of the GPS antenna,
is the velocity direction and
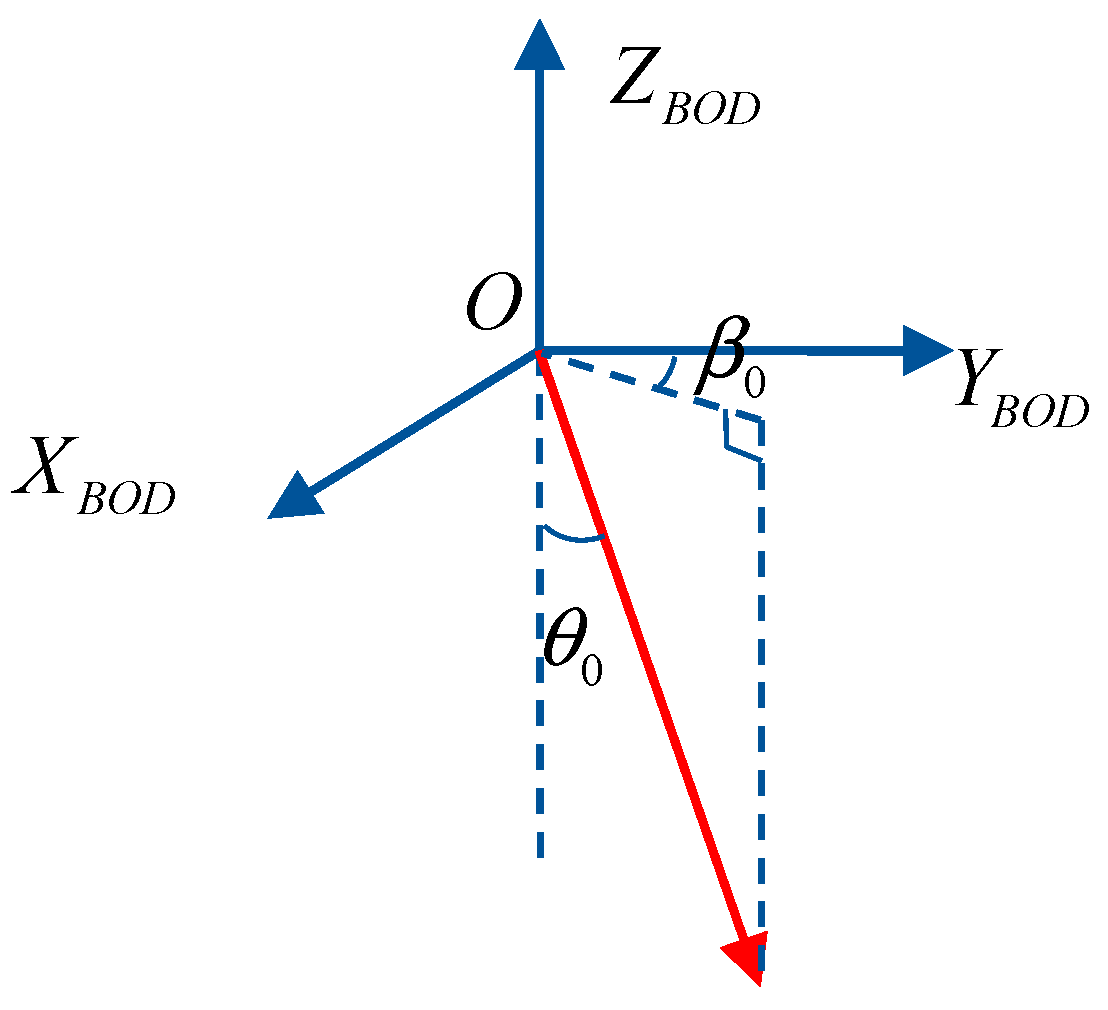
is the direction vector of the laser boresight. The relationship between the laser boresight and the satellite body coordinate system is defined in
Figure 6, where
is the angle between the laser boresight and −
direction, and
is the angle between the projection direction of the laser boresight on plane
and the
axis.
is the geolocation of the laser footprint in the international terrestrial reference frame (ITRF), which can be expressed by Formula (1).
where
is the satellite centroid coordinates in the ITRF coordinate,
is the rotation matrix from the satellite coordinate system to the ICRF coordinate system,
is the conversion matrix from the ICRF coordinate system to the ITRF coordinate system,
is the position of the laser fire point in the satellite coordinate system.
is the range measured by the laser system and
is the laser boresight vector in the satellite coordinate.
Due to the existence of systemic errors, the estimated footprint geolocation
is expressed as Formula (2) [
25].
where
are the position errors of the spacecraft;
is the system error including time synchronization, hardware measurement errors and other system errors; and
is the other error, which is mainly composed of atmospheric delay and tidal errors.
is the estimated pointing angle with errors.
Because the spacecraft position errors
can be calibrated through the ground observation station, the deviation of
from the actual position
can be calculated by Formula (4).
As can be seen from Formula (4), the pointing errors of and will lead to a geolocation error of the footprints. To ensure the geolocation accuracy of footprints, ICESat requires a pointing accuracy of less than 1.5 arc-seconds, and ICESat-2 requires a pointing knowledge of less than 6.5 m (~2.6 arc-seconds).
2.3. Iterative Pointing Angle Calibration Method
The laser pointing angle calibration method based on terrain is used to obtain the actual pointing angles
from the estimated angles
through terrain matching. The proposed iterative least z-difference (I-LZD) algorithm is based on the least z-difference matching criterion and the least-squares matching theory [
36,
37]. The I-LZD algorithm is similar to the iterative method used in geomagnetic matching [
38] and to the iterative calibration method used in the ICESat range and mounting bias estimation method based on a surface fitting strategy [
23]. The principle of the I-LZD algorithm is described as follows.
Generally, the systematic errors
are small, and the actual pointing angles
can be approximately expressed by the estimated angles
using Formula (5).
where
. After higher-order terms are ignored, we can obtain Formula (6).
According to Formulas (4) and (6), the corresponding deviation between
and
can be expressed by Formula (7).
On the other hand, for a given terrain, let
be the elevation of the horizontal coordinates
, which corresponds to the laser footprint
. Similarly, let
be the elevation of coordinates
. Based on the gradient information of the terrain, for a given
,
can be approximated by
using Formula (8).
where
and
are the gradients in the x and y directions for point
in the terrain. According to Formulas (7) and (8), the z-difference between the actual footprints and their corresponding terrain can be derived from Formula (9).
According to the least square theory, we can obtain the target Equation (10).
Normally, let respectively take the partial derivatives of , and , and the equation group can be obtained by setting these partial derivatives to zero. By solving for , and , the one-step approximation to the actual angles from the known angles can be obtained. The pointing angles and ranging offsets can be precisely calibrated by several iterations. Considering the complexity of solving the above equation group, we decompose the above one iteration into two steps.
Step 1: Updating
: Keeping
constant, the updates of
and
can be achieved by solving Equation group (11). Then,
can be updated by Formula (3).
Step 2: Updating
: When the pointing angle
is constant, Formula (9) becomes
. Then, the update of
can be achieved by solving Equation (12).
The result of the above two steps is the formation of one-step corrections to the values of , and . Due to the approximate errors in the calculations, iterations are required to obtain an accurate correction.
4. Discussion
Pointing angle calibration is a basic problem in the spaceborne laser altimeter. Most of the current terrain matching-based pointing angle calibration methods are for large spot and full-waveform laser altimeters, such as GLAS, or laser altimeters without waveform recording ability, such as the laser altimeter on ZY3-02 [
39]. A wide range of terrain is needed in these calibrations. Considering the new characteristics of the photon-counting laser altimeter, which was launched recently, our paper explored the feasibility of pointing angle calibration using a small range of terrain, and an efficient calibration algorithm was proposed. The following is a further discussion about the novelty of our method, some interesting experimental phenomena, limitations and so on.
4.1. Comparison with Other Methods
Since there is little research found in the literature on the calibration methods for photon-counting lidar based on terrain matching, we mainly compare our calibration method with the ones used for traditional laser altimeters. The photon-counting laser altimeter has distinct characteristics compared with the traditional ones. The traditional laser altimeters usually have large spots and low repetition frequency, e.g., GLAS has a footprint diameter of about 70 m and a footprint interval of about 170 m. Meanwhile, GLAS has full waveform recording ability, which means that a large number of echo photons can be obtained within one footprint, and the decomposition of these waveforms can help toward understanding the elevation distribution [
40]. However, the ATLAS of ICESat-2 has a footprint of less than 17 m with an interval of 0.7 m. Although its footprint is small, there is only a small number of echo photons, and the random error of altitude deviation in rough terrain areas is large.
Regarding the calibration methods based on terrain matching, the traditional laser altimeter mainly has two kinds of methods, which are the terrain profile matching method and the waveform matching method [
41]. However, the waveform matching method is a special method for full-waveform laser altimeters, which is not suitable for photon-counting laser altimeters with only a few echo photons. The terrain profile matching method calibrates the pointing angle based on the residual error between the measured elevation and the terrain. Our method falls into the latter category. In general, our terrain profile matching strategy for small footprint interval altimeters based on a small range of terrain is similar to the strategy for large footprint intervals based on a large range of terrain. However, the measurement accuracy of photon-counting lidar does not increase proportionally. On the contrary, the photon-counting altimeter receives less information and has larger error in single footprint measurement. Therefore, a calibration method based on a small range of terrain still needs to be studied, which is also an important intention of this paper. Furthermore, regarding the calibration methods based on terrain profile matching, the most direct method is to traverse the parameter space to find the location of the minimum elevation difference. The pyramid search method has been developed after the fact to speed up the search progress [
20,
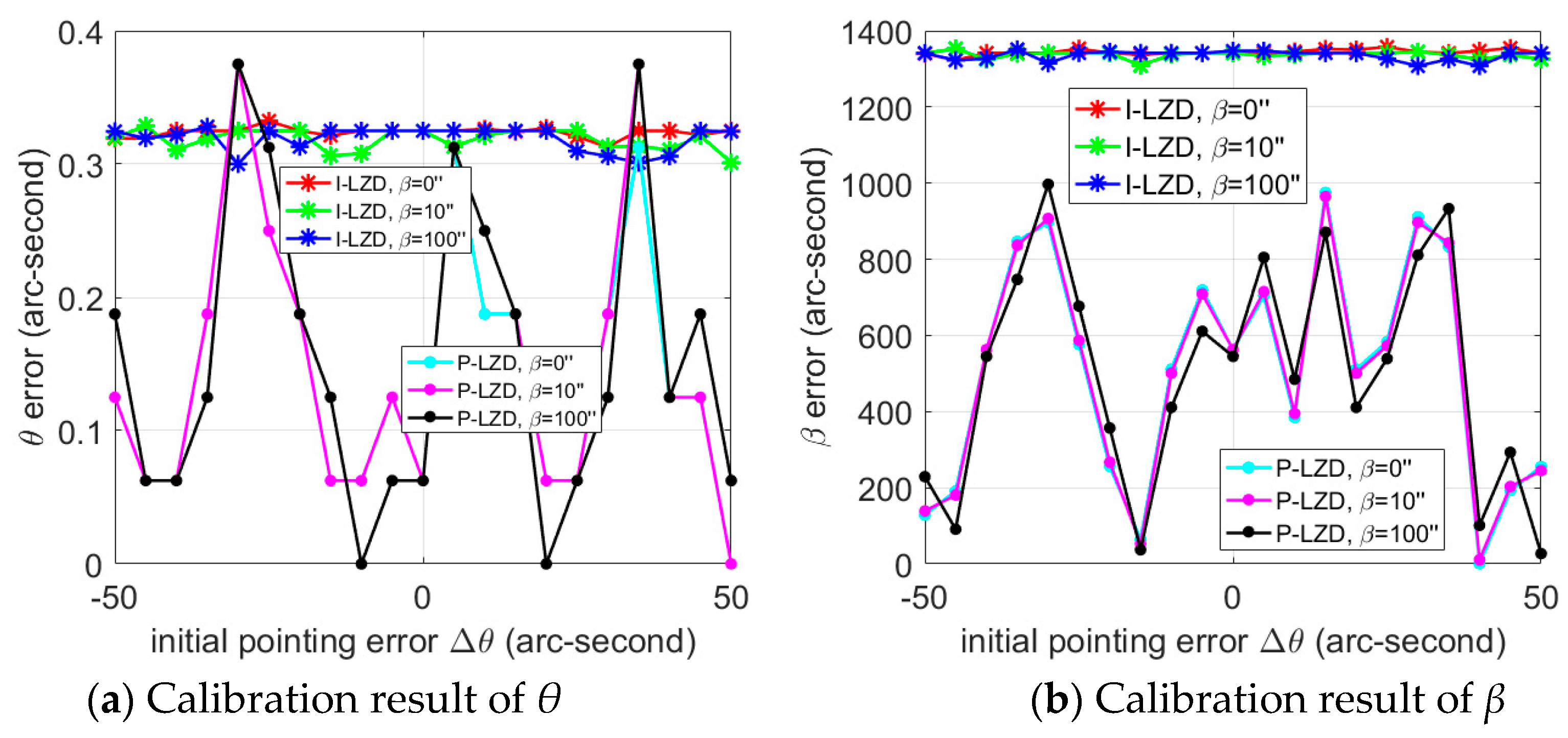
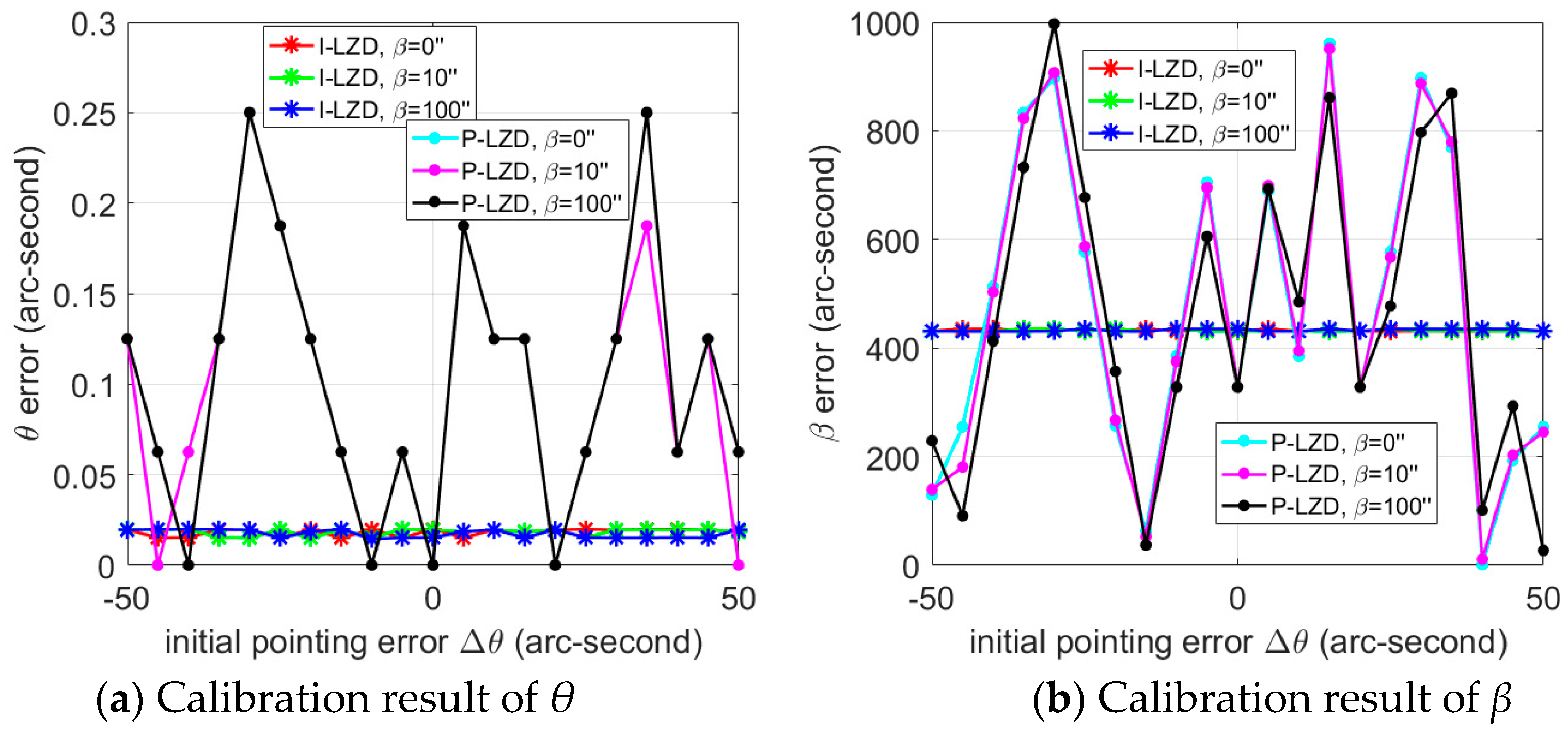
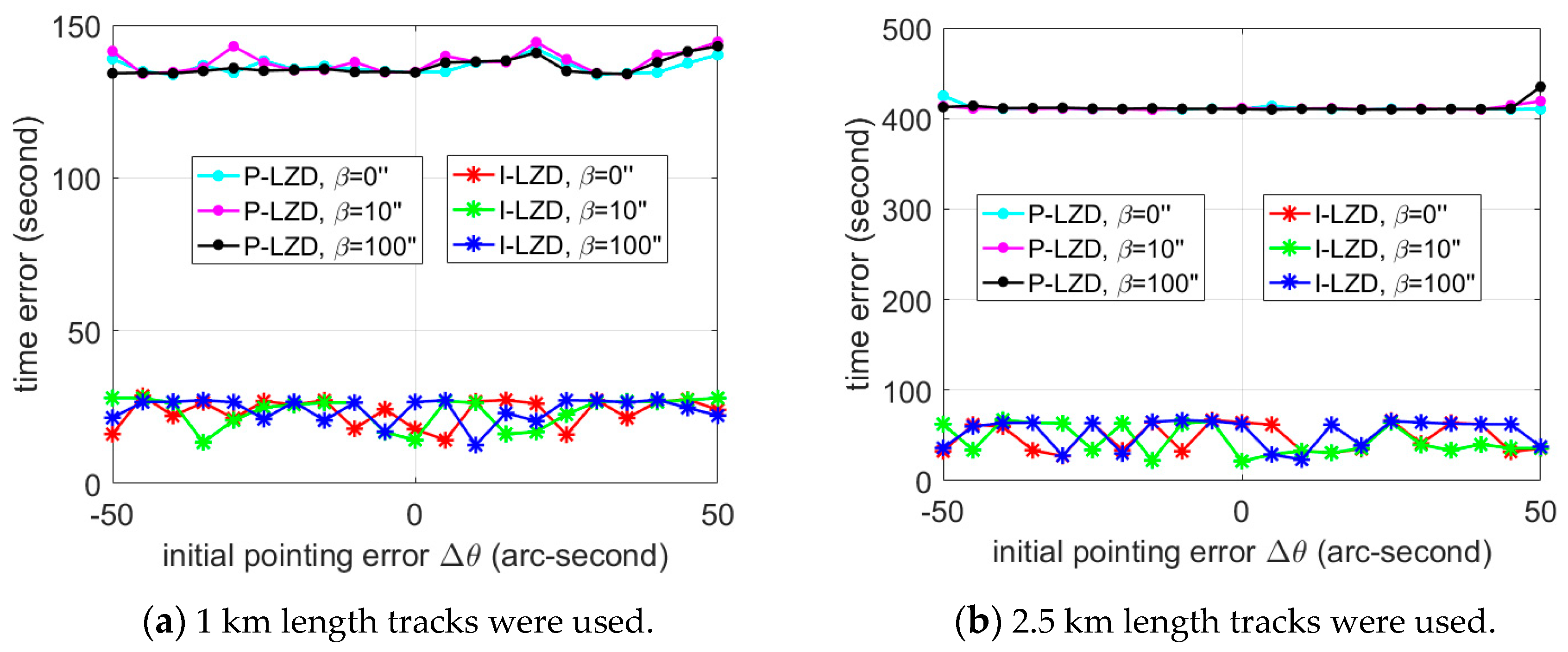
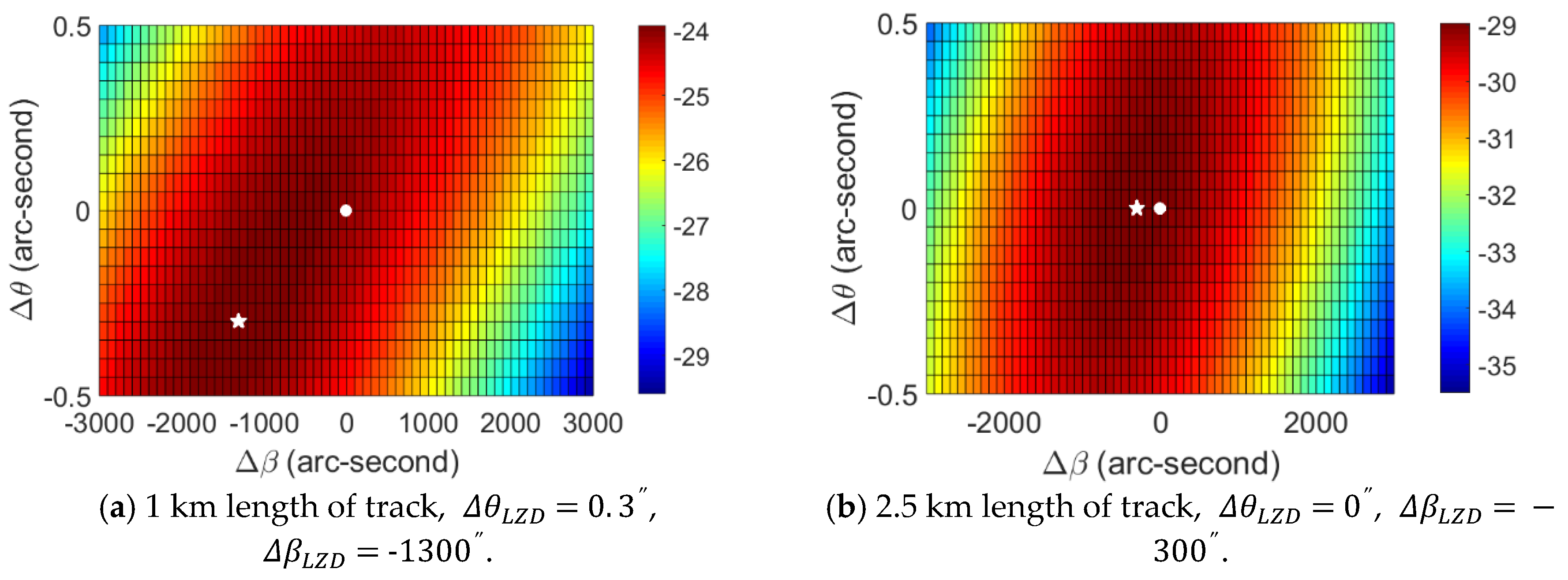
35], and it was compared in our research. Compared to our method, there are many problems in the pyramid method. Firstly, although the matching time can be greatly reduced by pyramid search compared with the direct search method, it is still relatively long compared with our iterative method, which searches along the gradient direction. Secondly, in our experimental parameter settings, the P-LZD method shows instability, as shown in
Figure 7 and
Figure 8. Theoretically, the P-LZD and I-LZD methods are based on the same LZD matching criteria; their final search results should be similar, and their main difference should be in their efficiency. In order to determine the different behaviors of the P-LZD and I-LZD algorithms, for the experimental data corresponding to
Figure 7 and
Figure 8, we traversed the parameter space of
and
at an interval of 0.05 arc-seconds and 100 arc-seconds around
and
. The result is shown in
Figure 18 (the z-difference is displayed inversely).
It can be seen from
Figure 18 that the least z-difference (LZD) position is
for the 1 km long track. Meanwhile, for the 2.5 km long track, the LZD position is
. By comparison with the results in
Figure 7 and
Figure 8, the calibration results of the I-LZD method are closer to the actual position. For the P-LZD method, the actual LZD position of the 1 km long track is beyond its search range, and this may lead to the optimistic result in
Figure 7. The actual LZD position of the 2.5 km track is within the search range of the P-LZD method; however, the result of the P-LZD method still shows the characteristic of fluctuation. Therefore, the search parameters of the P-LZD method need to be well estimated in advance to balance calculation time and effect. However, there is no need for prior parameter estimation in the I-LZD method.
In addition, a similar iterative terrain matching method was proposed in reference [
41] for the calibration of full-waveform laser altimeters. However, this method required the calculation of the normal vector of terrain over the footprint region, being compulsory to carry out a local plane fitting of the terrain. On the contrary, our method is based on the gradient of the terrain, so no plane fitting is needed. At the same time, in the idea of algorithm modeling, the method in [
41] focuses on building a functional relationship between laser ranging and pointing angles using terrain information, while our method focuses on establishing the approximate relationship between the error value and the truth-value.
4.2. Factors Influencing Calibration Accuracy
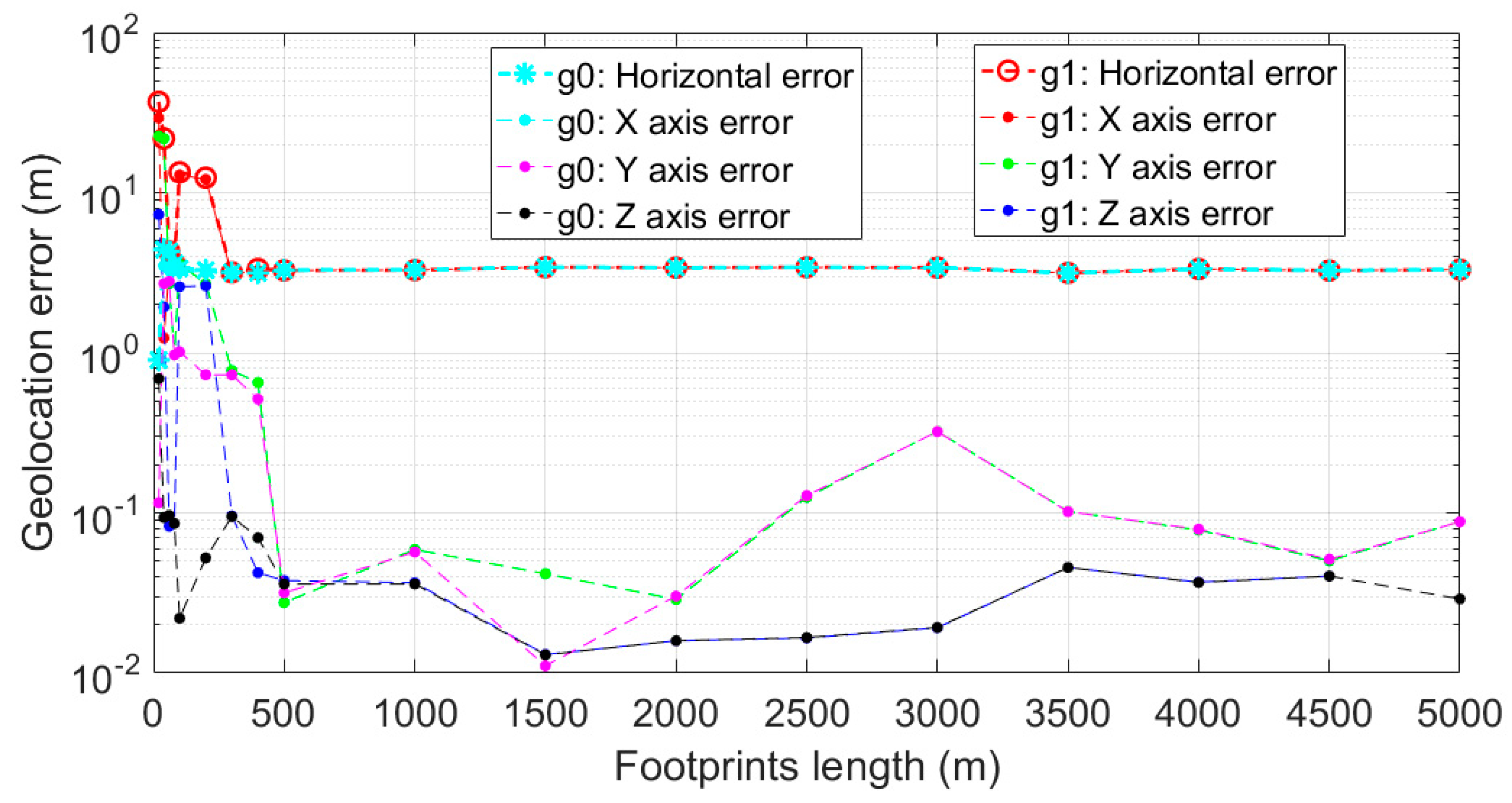
(1) The influence of footprint length.
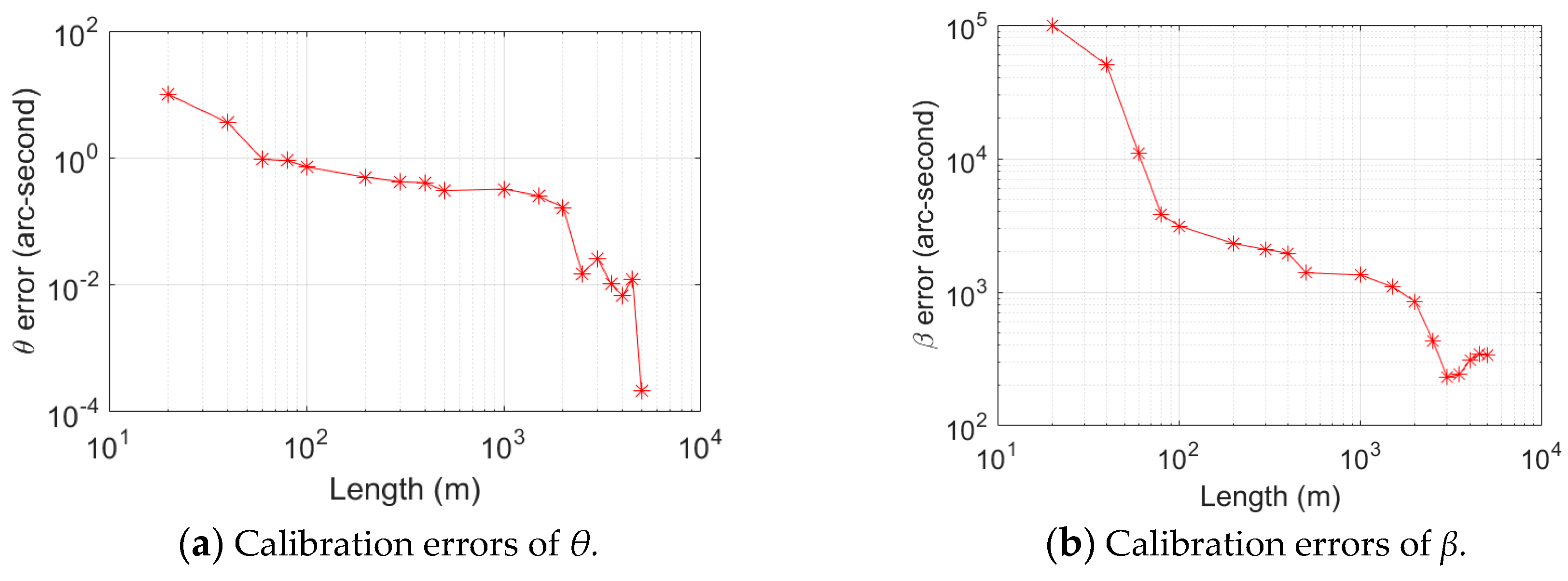
The results in
Figure 7 and
Figure 8 and
Figure 13 and
Figure 14 show that the calibration results are affected by the lengths of footprints. When the data length is less than 100 m, the calibration error is close to or greater than one arc-second. When the data length is more than 1 km, the calibration error can be reduced to less than one arc-second. Using shorter data lengths helps to expand the range of terrain options. However, when the data length is short, the influence of a single range error of the photon-counting lidar may increase. When a single measurement value is used to calibrate the pointing angle, Formula (13) can be used to estimate the influence of range error on the pointing angle [
19]. For a 1° slope (S) and 500 km orbit (h), a range error of 0.5 m will cause a
θ error of ~10 arc-seconds. However, increasing the number of equal precision measurements can usually improve the ranging precision.
As we can see from
Figure 18, with the increase in data length, the actual LZD position is closer to the theoretical position. We can further analyze the factors that affect the precision of the calibration result by the error model. Formula (9) can be viewed as a function of
and
as follows.
where
is the footprint number and
.
li represents the matching error of laser footprints and terrain. Let
,
and
be the precisions of
,
and
, respectively. Their relationship can be derived from the error theory as follows.
where
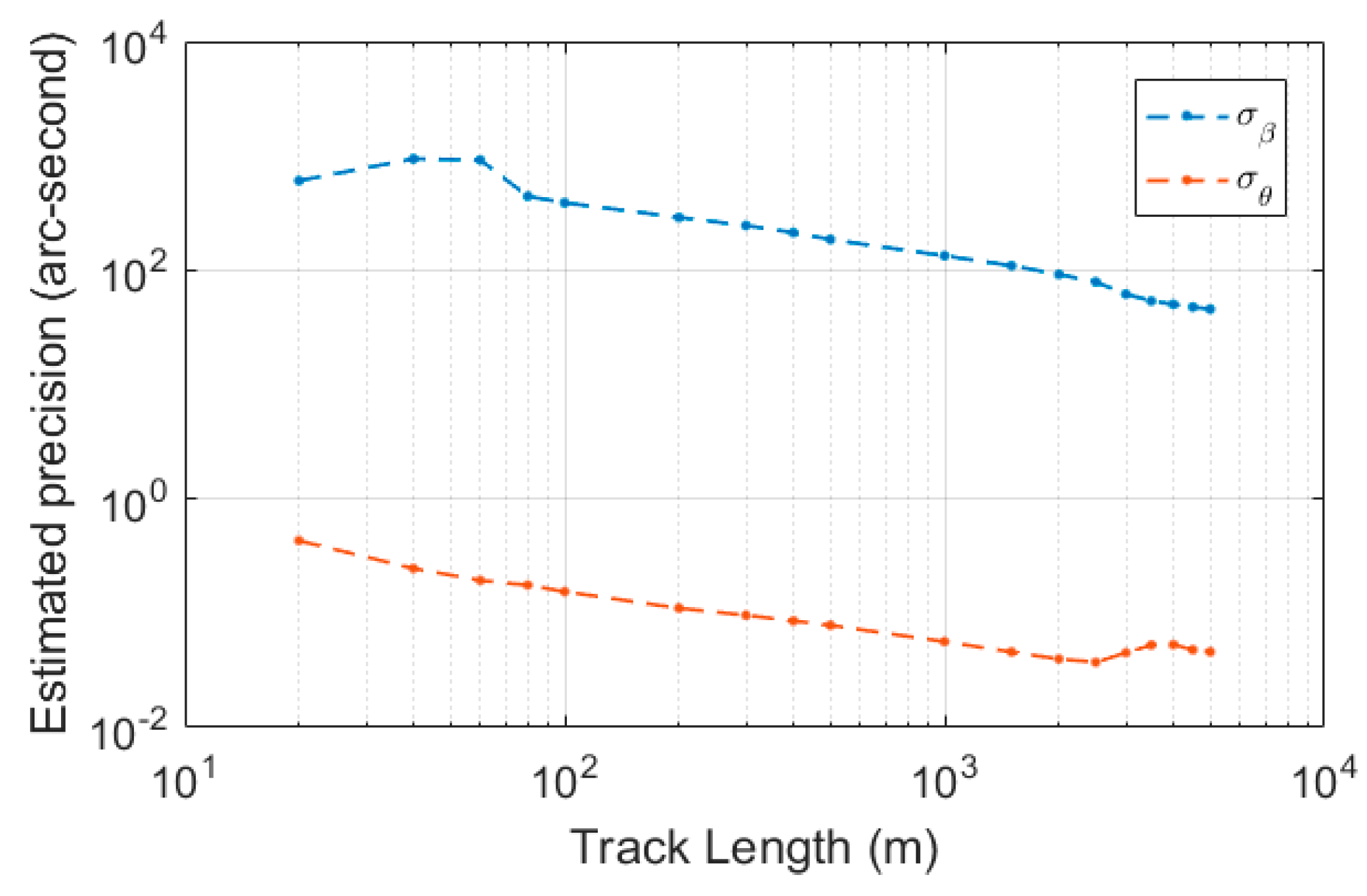
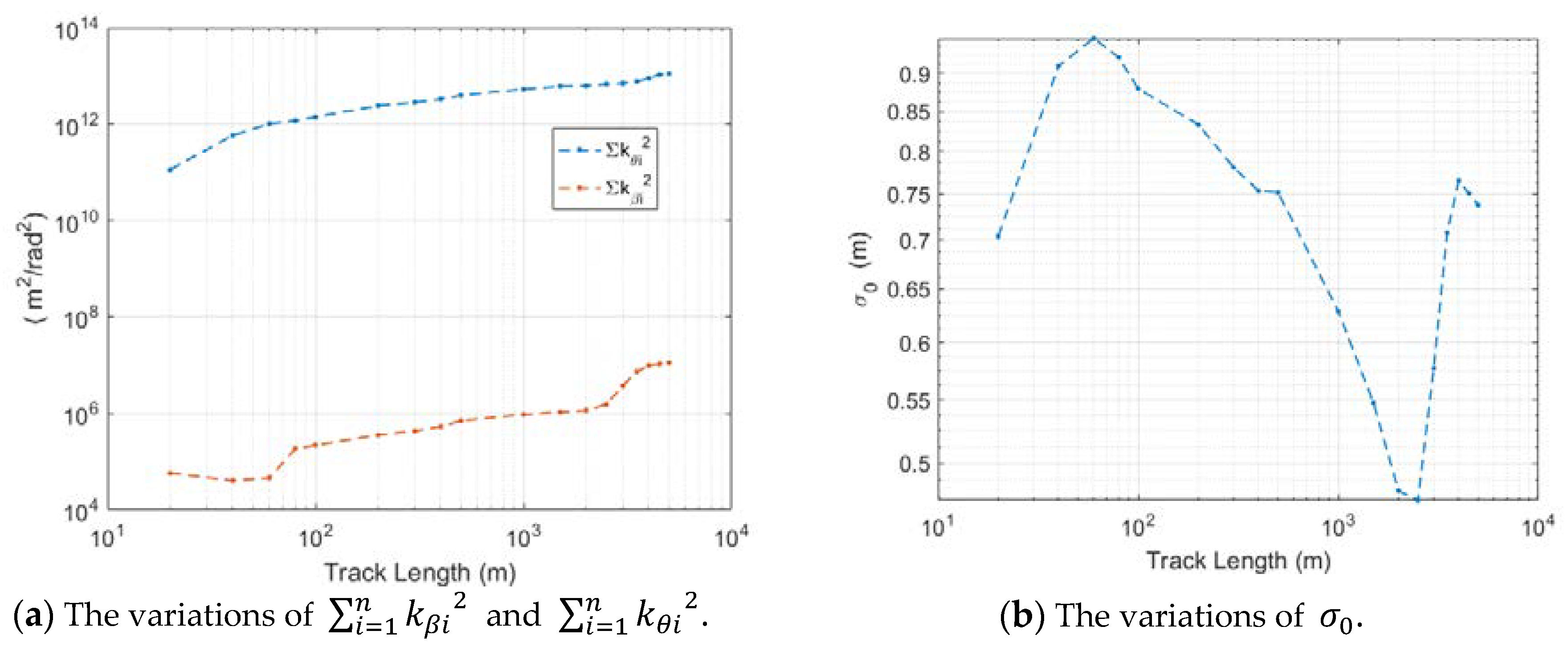
Figure 19 shows the estimated precisions based on the above error model under different track lengths; the terrain data and altimeter data from the experiment were used. In addition,
Figure 20 shows the variation of
,
and
with different track lengths.
Figure 19 and
Figure 20 show the factors that influence the calibration. Because
in the experiment, it is not shown in the figure. Firstly, with the increase in track length, the estimated precision gradually decreases with the length. Secondly, the precision of
β is about three orders of magnitude lower than that of
. Thirdly, among all the factors,
and
vary in a larger range, and their tendencies are consistent with the estimation precision. In the satellite coordinates,
and
could be represented as follows.
where
is the laser range, and
and
are the gradients in x-direction and y-direction for footprint i. It can be seen that the terrain variations have a great impact on
and
. When the terrain is flat,
, and
cannot be calibrated by terrain matching. In general,
and
will increase with the track length. However, their increased amplitudes also depend on the correlations among
,
and the pointing angles. This may lead to an optimal terrain selection problem.
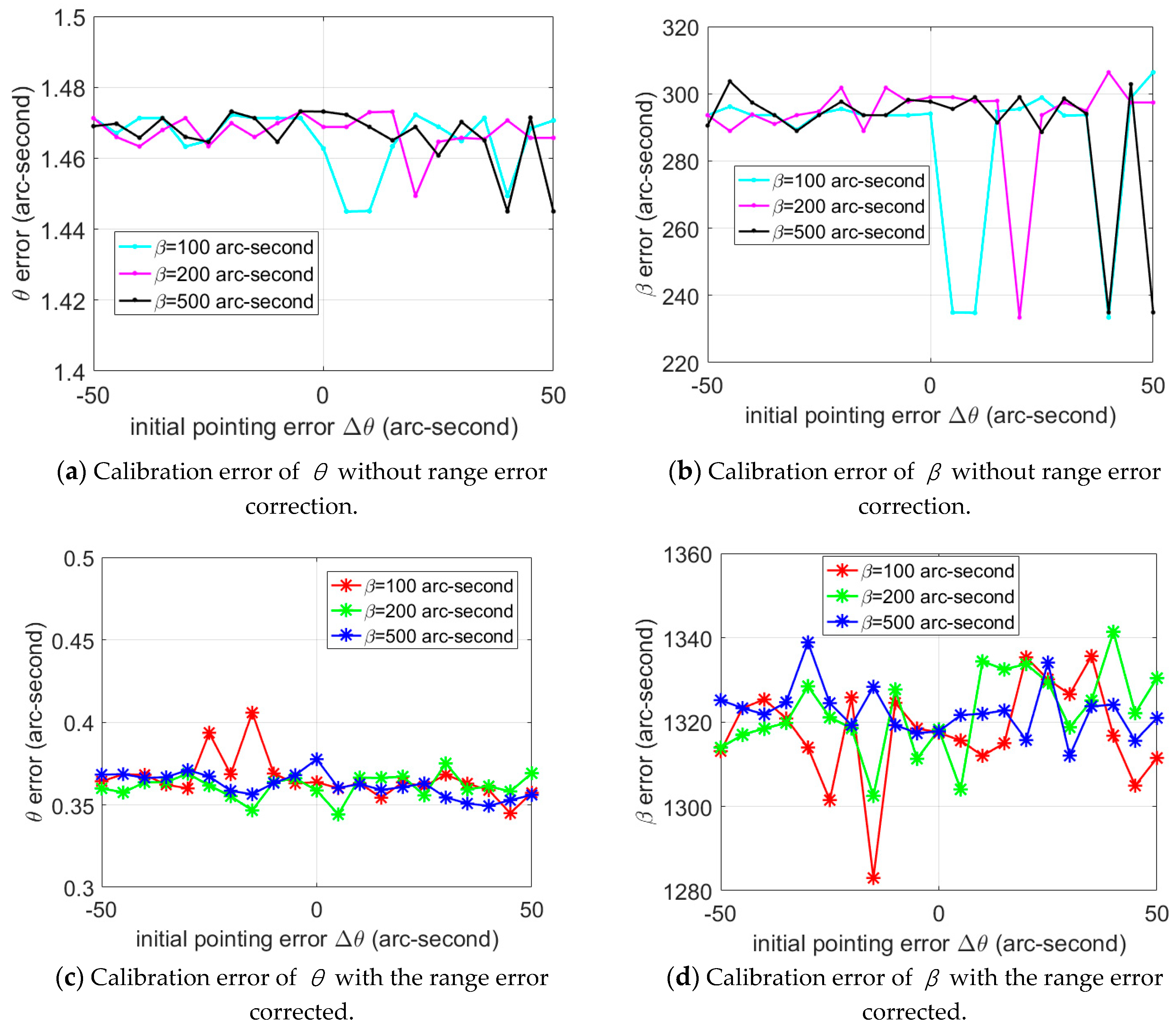
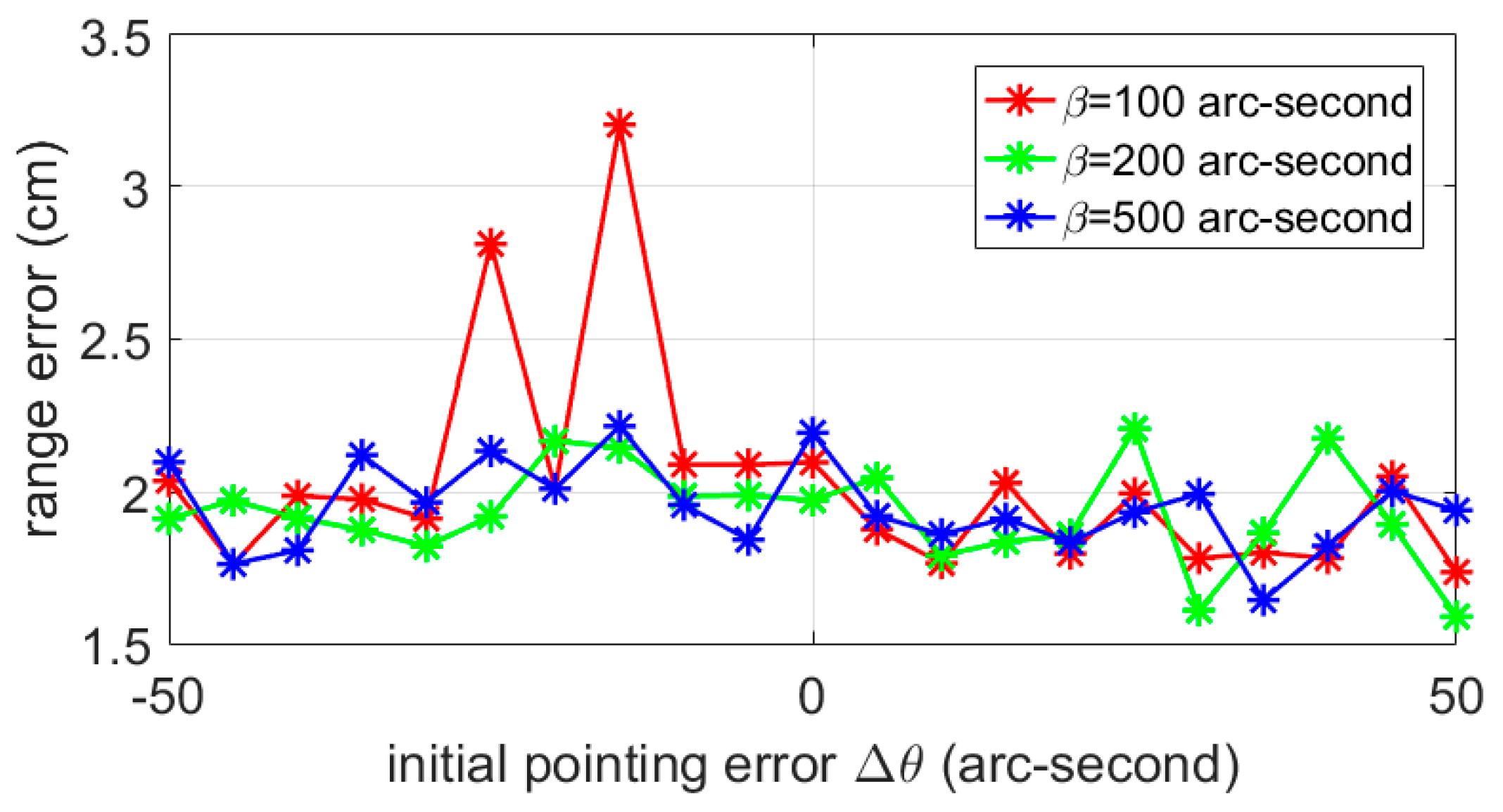
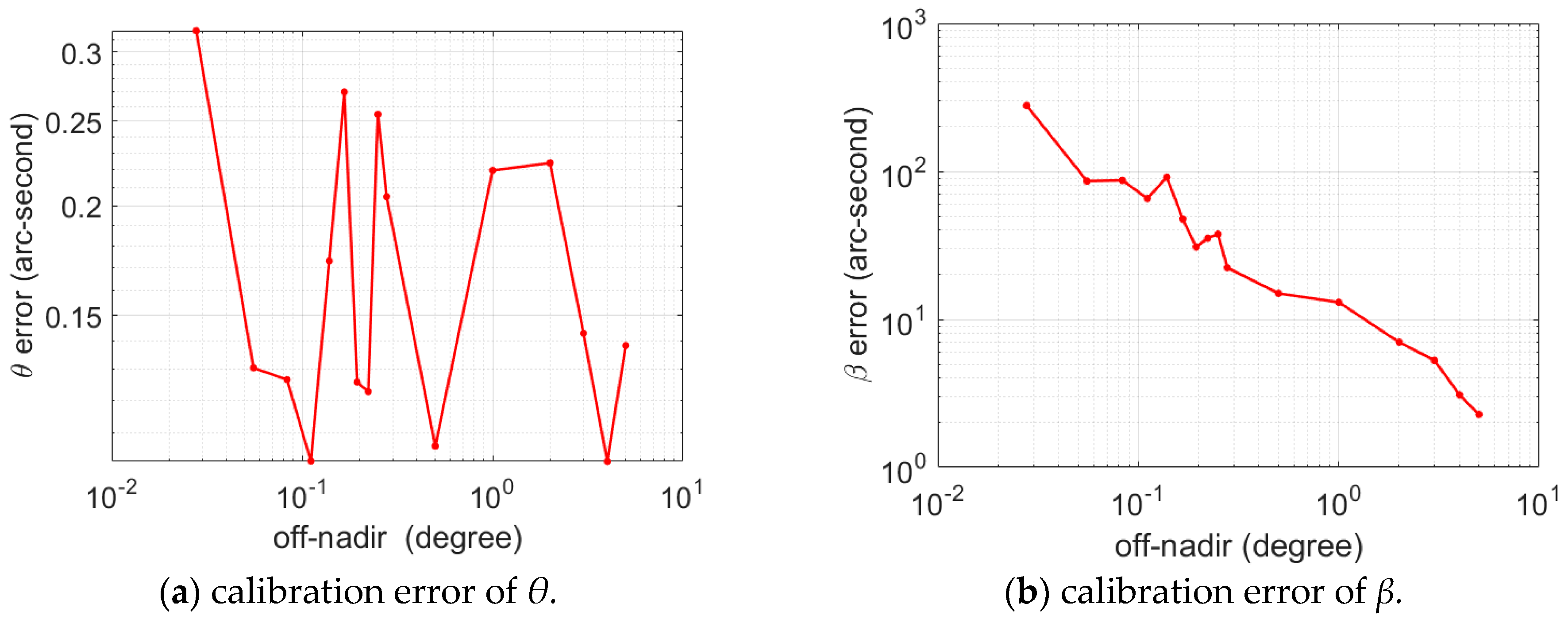
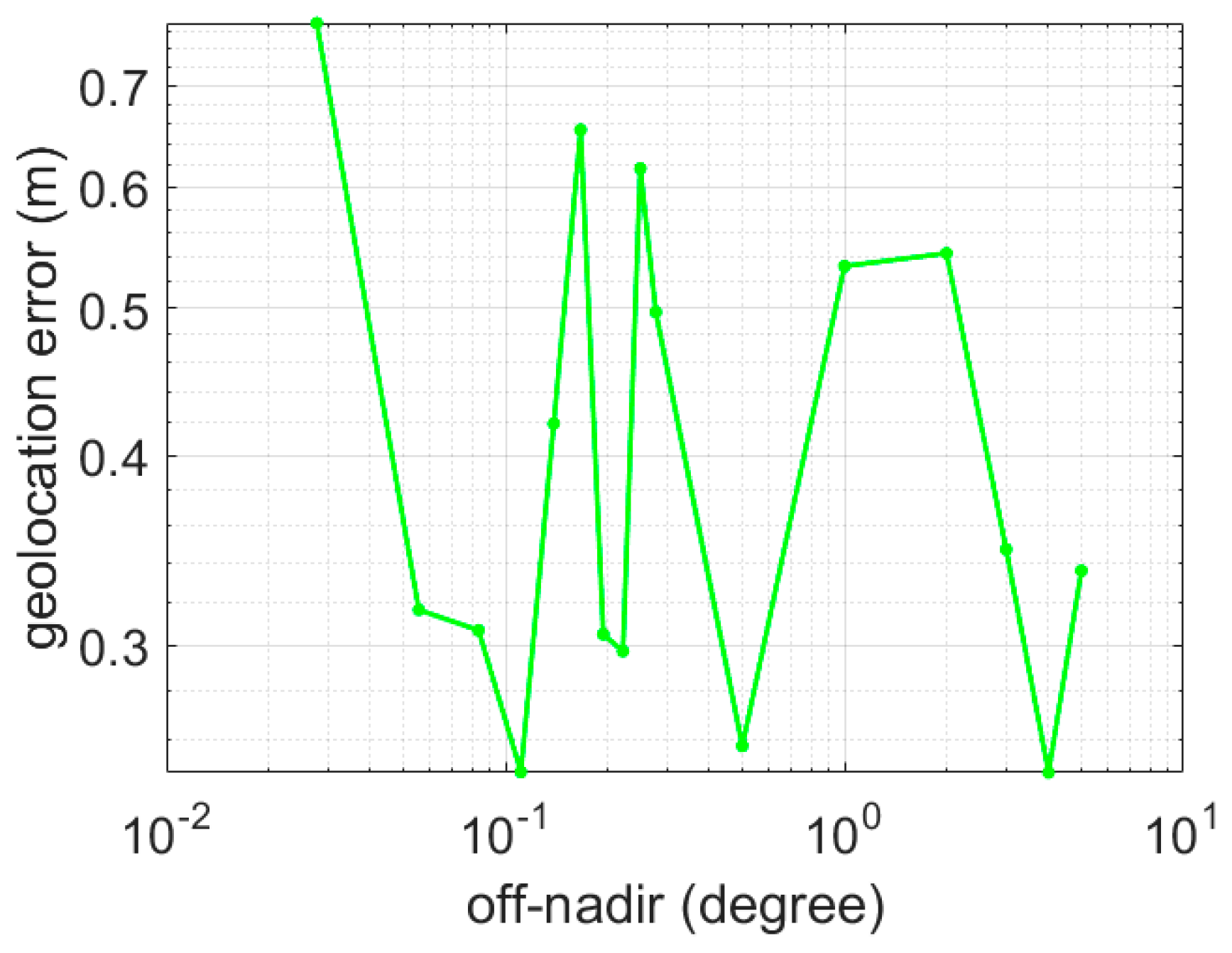
(2) The influence of off-nadir pointing.
The results of experiment 3.3 indicate that with the increase in the off-nadir pointing angle, the calibration accuracy of β increases rapidly, but the calibration accuracy of θ angle shows little change. According to the measurement geometry model, we can easily see that when the θ angle is small (such as 100 arc-seconds), the β angle has little influence on the position of footprints. However, with the increase in the off-nadir pointing angle, the influence of β angle on the footprint position also increases. Because we adopt the calibration criterion based on minimum elevation difference, the calibration accuracy of parameters depends largely on their influence on the elevation difference. This can explain why the calibration accuracy of β angle increases with the off-nadir angle.
4.3. Limitations of Our Calibration Method
Convergence to local optimality: Since our algorithm approximates to the local optimum in each iteration, it will face the problem of convergence to the local optimum. For this problem, we need to take measures to make the iteration process jump out of the local optimum. A coarse-to-fine strategy of a hierarchical representation of the terrain can be used to limit the sensitivity to local surface variations, and this method can enhance the rate of convergence [
23]. In addition, for the case of large initial angle error, large-range DEM [
16] data can be used as the matching terrain for a rough search. Meanwhile, correlation matching criteria can also be considered for its large pull-in range, which is often used in image matching [
42]. The Monte Carlo method used in [
23] can also be used to find the global optimal location.
The influence of spacecraft attitude error: In our algorithm, there is no special treatment for the attitude measurement error of the spacecraft. In fact, the attitude measurement error of the star sensor will be absorbed into the errors of θ and β. Therefore, their influence will be corrected indirectly.
The influence of topographic changes: The precondition of our method is the accurately measured terrain. Considering that the calibration may be carried out throughout the entire mission of the spaceborne altimeter, which may last for several years, the influence of the terrain modifications between airborne and spaceborne acquisitions needs further study. In addition to selecting almost constant areas as matching terrain, we can also improve the practical value of the algorithm in relation to two aspects. (1) Extracting the parts of the terrain that remain unchanged. For vegetation-covered areas, we can extract the ground through appropriate algorithms to obtain a relatively stable terrain from both airborne and spaceborne acquisitions; (2) Detecting the modifications. The terrain to be matched can be segmented, and the matched offset of each segment can be evaluated separately; then, the segments that may have changed can be removed by statistical methods. At the same time, because our algorithm only needs a short track, some man-made structures with little change, such as a region where buildings are relatively constant in the city, can also be used as a candidate for matching terrain. Calibration methods based on these terrains still need to be further validated.
4.4. Experimental Limitations
In our experiment, there are still some limitations: (1) Although there was a random deviation of several meters between the simulation footprints and the actual elevation, the real photon-counting lidar measurement results also contain a large amount of background noise, and noise filtering is still a big challenge [
43,
44,
45]. (2) In addition, in our simulation, the change in target reflectivity within the footprint is not considered. The basic assumption of the simulation algorithm is that the detection probability of the echo signal in the footprint is the same, or the detection probability of each position in all the footprints is the same. However, when the track is short, the reflectivity may be non-uniform or deviate in a certain direction, which will affect our simulation method. (3) The point cloud density of airborne lidar used in our experiment was not high enough. The point cloud density and its uniformity will also affect the randomness of the footprint simulation. In the case of off-nadir pointing, the effect of refraction needs to be considered. Atmospheric refraction is assumed to delay the roundtrip measurement with no effect on the laser spot location. This effect is expected to be small for the nadir-looking but may be significant for off-nadir operations.
4.5. Applications
Comparing our method with the orbital maneuver calibration methods on the ocean surface far from the poles, our proposed method is a promising direction to calibrate the pointing angle of a photon-counting laser altimeter by high-precision local terrain obtained by airborne lidar. Our simulation results verify the feasibility of using short-range topographic data to quickly calibrate the pointing angle of the photon-counting laser altimeter; this means that more terrains can be used as calibration areas and increases the flexibility of calibration. Compared with the traditional calibration methods, which take tens of minutes or even hours, our proposed iterative calibration method based on a small range of terrain can realize almost real-time calibration. This may be useful for applications that require rapid and accurate measurements, such as the monitoring of natural disasters.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}