UAV-Based Slope Failure Detection Using Deep-Learning Convolutional Neural Networks





Abstract
:
1. Introduction
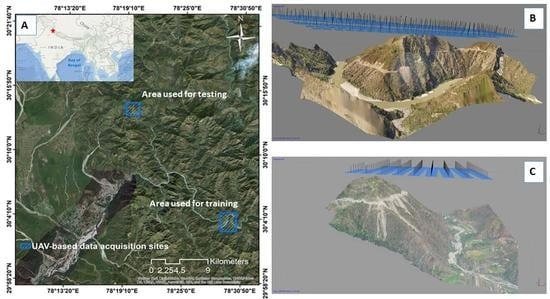
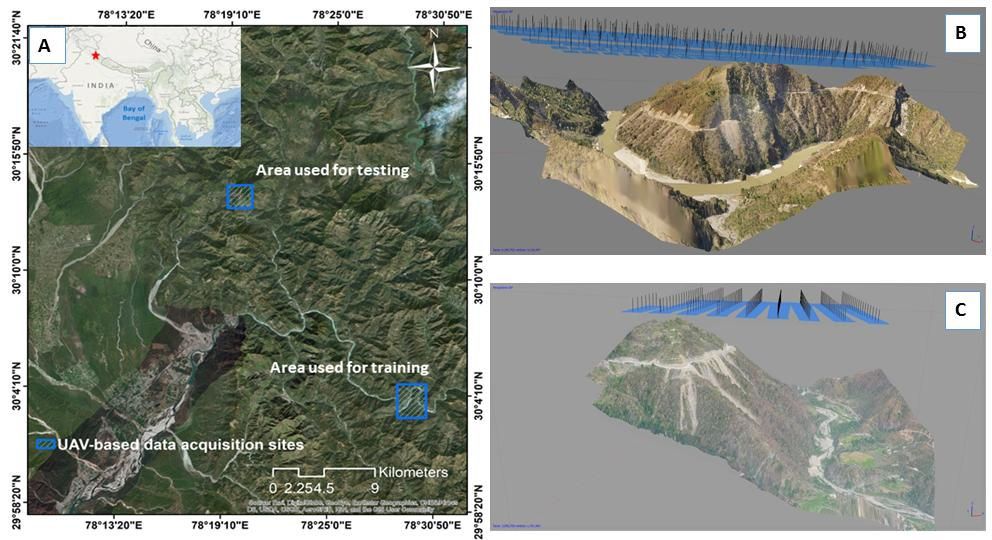
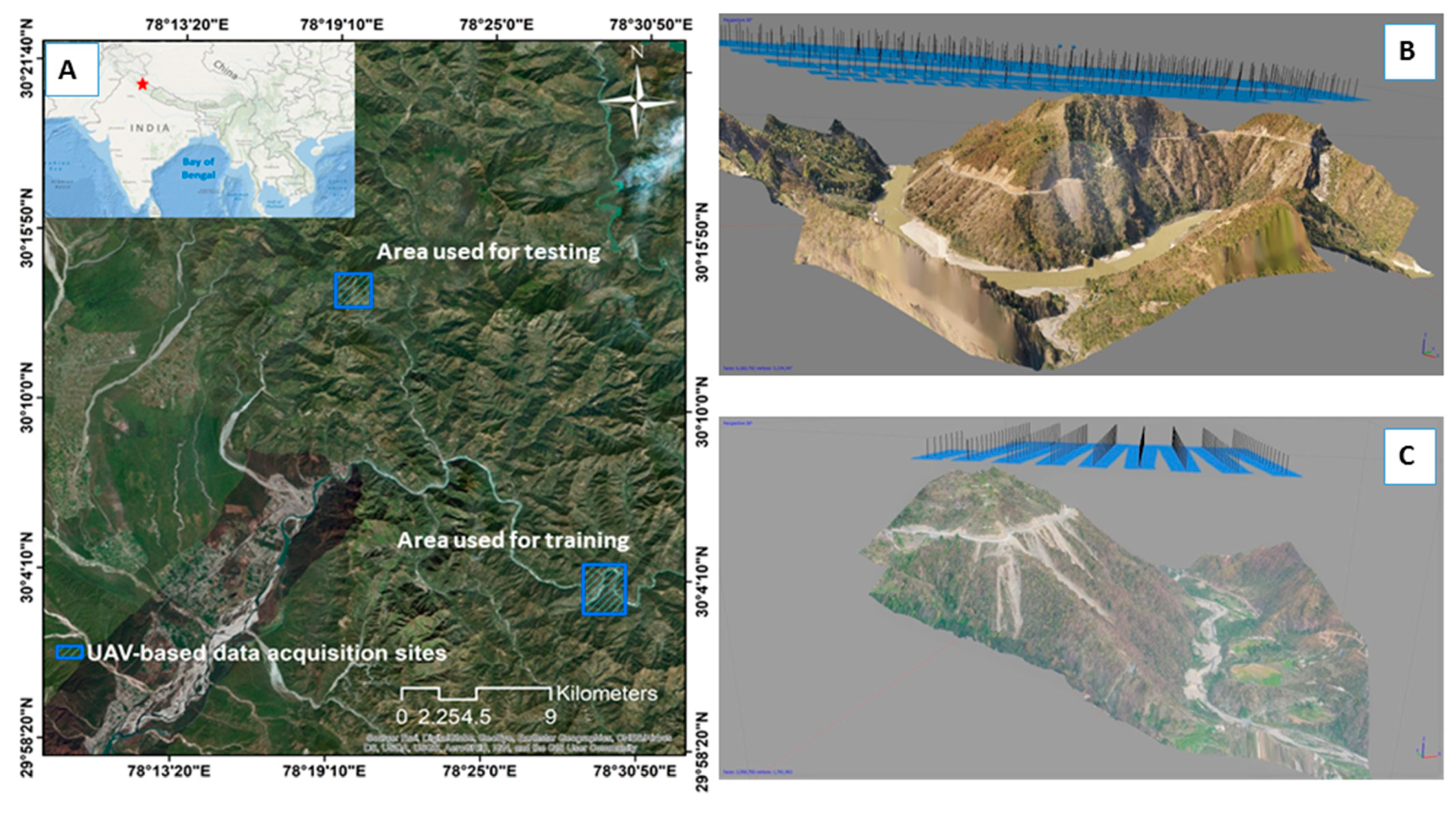
2. Study Areas
3. Workflow
3.1. Overall Methodology
3.2. Materials
UAV Surveys
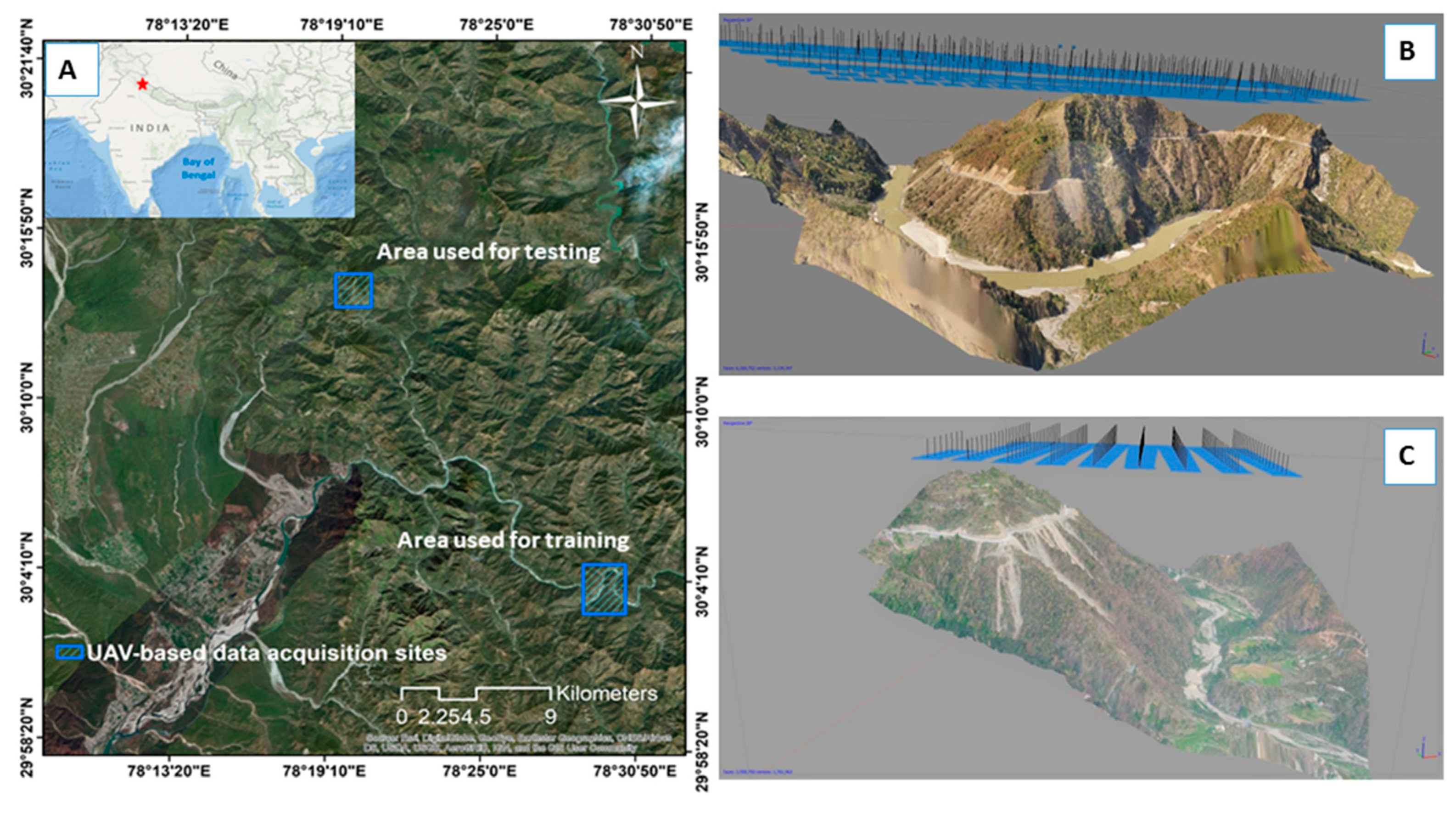
3.3. Photogrammetric Processing of UAV Data
3.3.1. Ortho-Mosaic Map
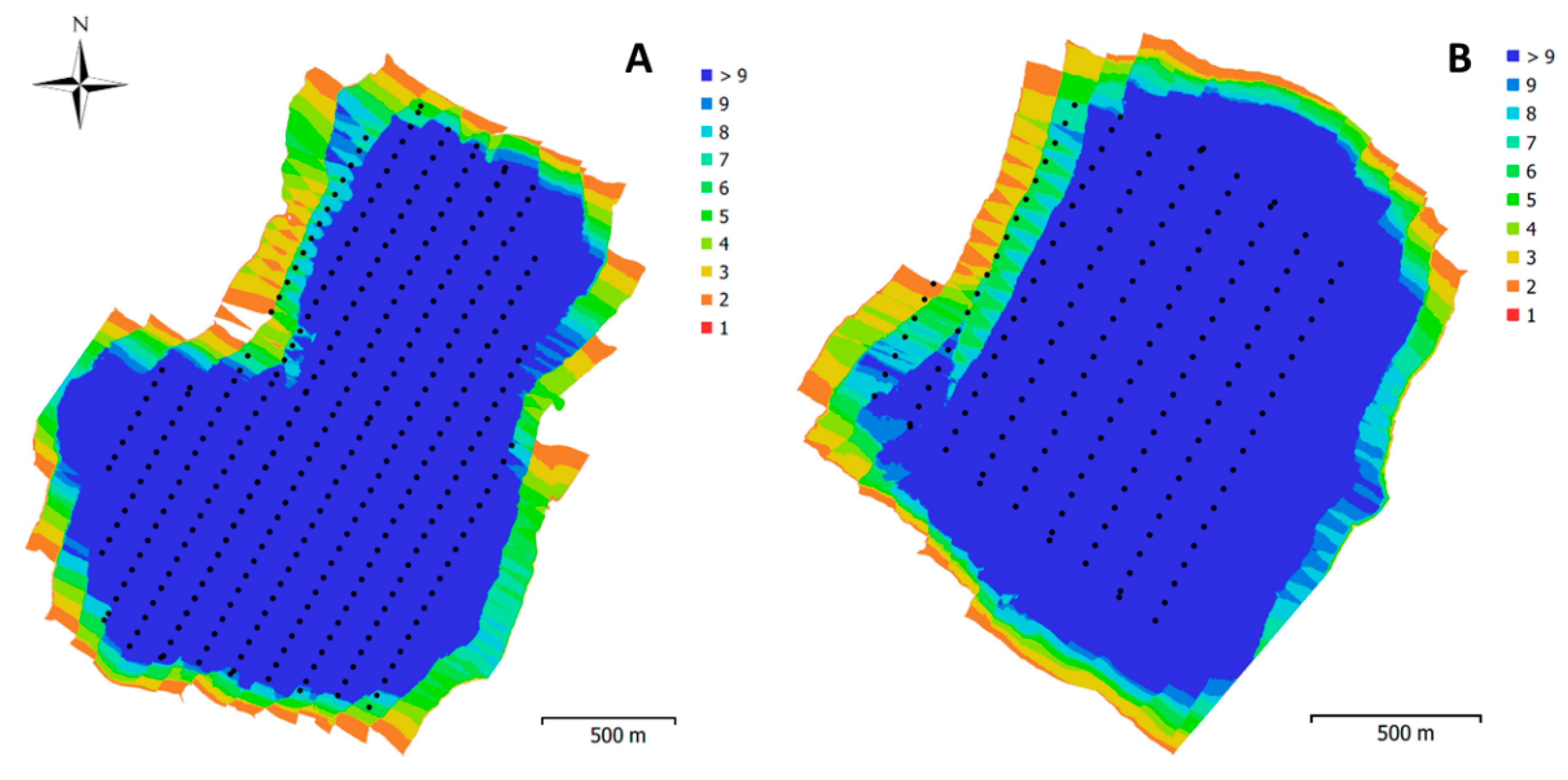
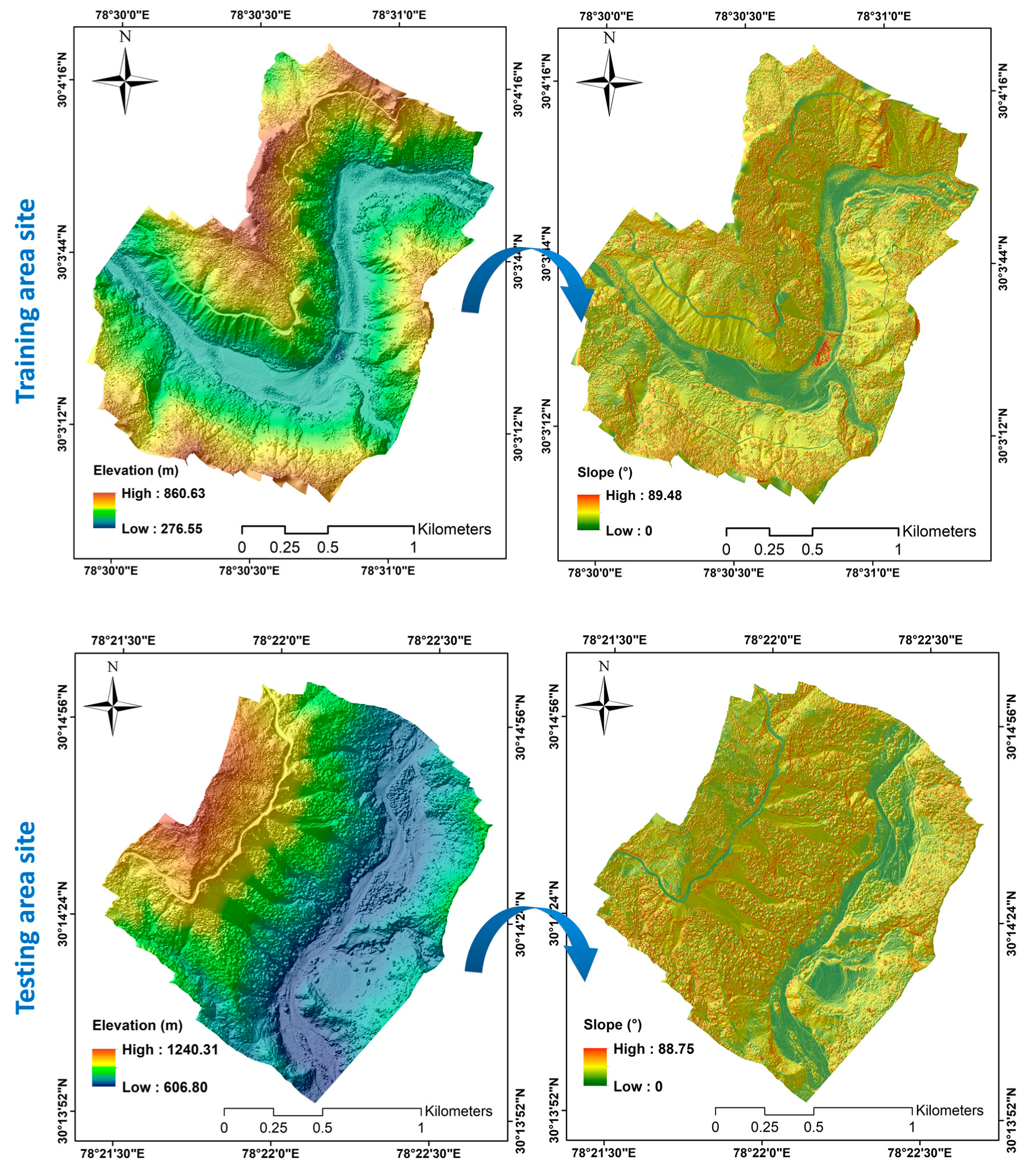
3.3.2. Digital Elevation Model Generation
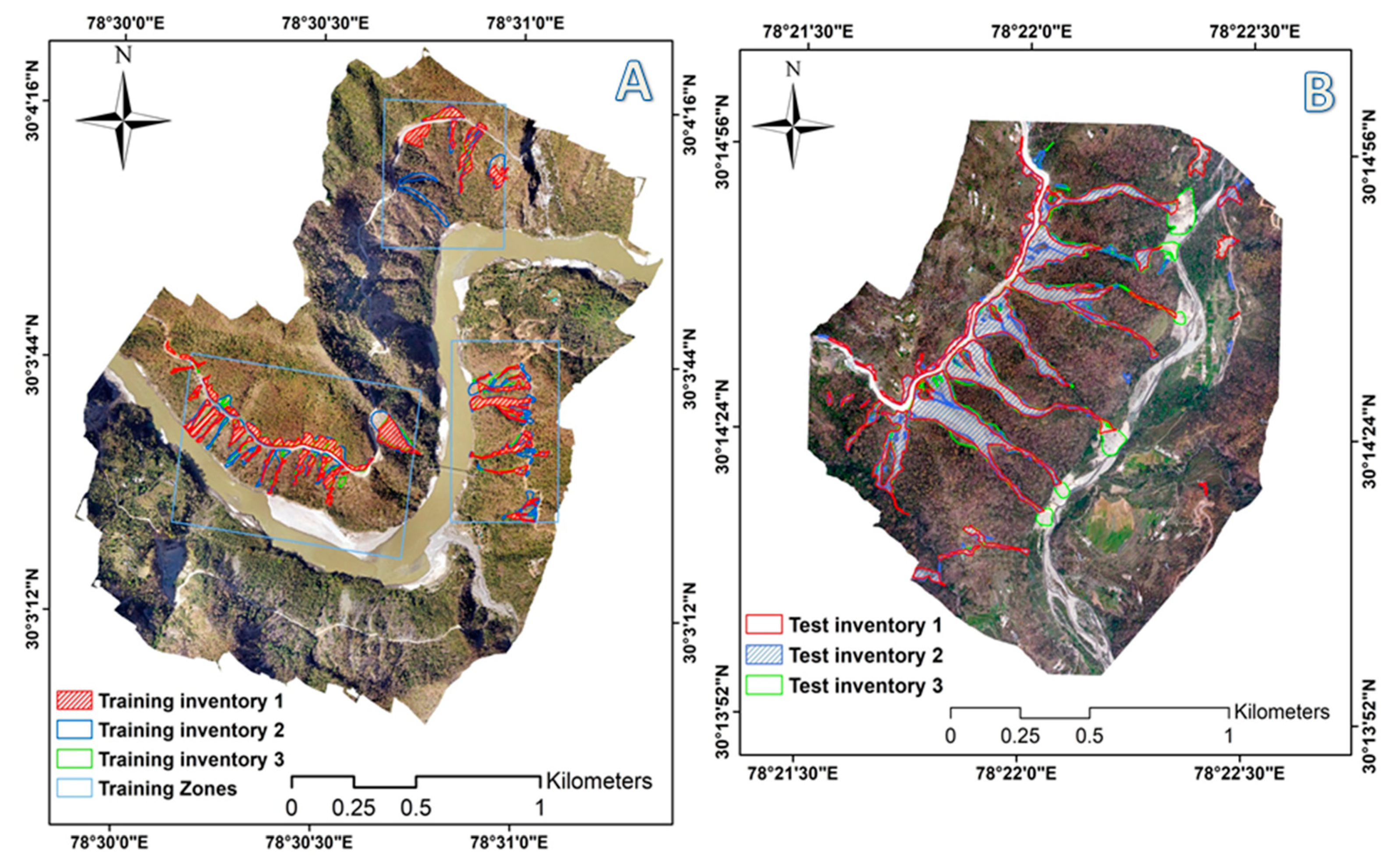
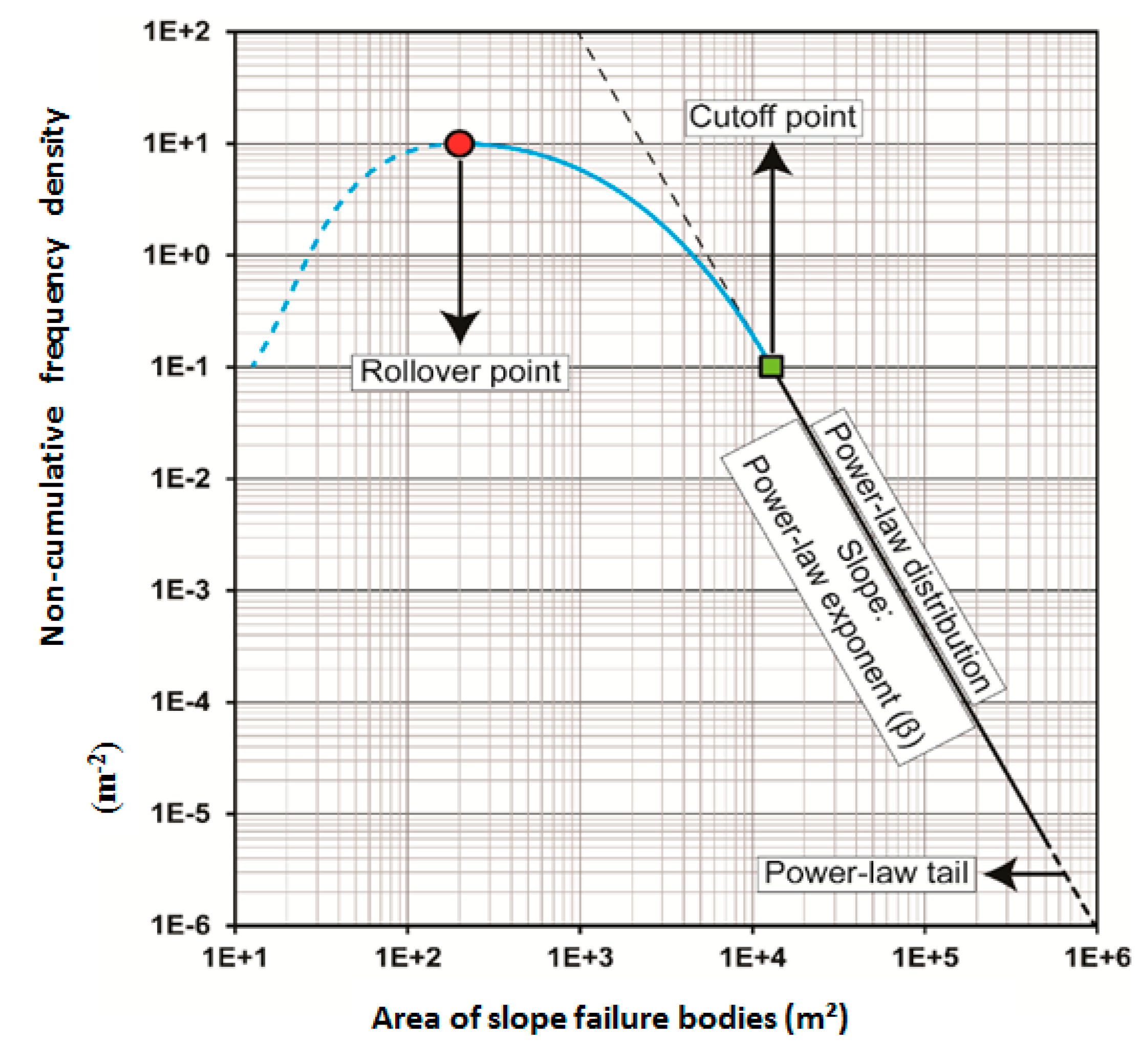
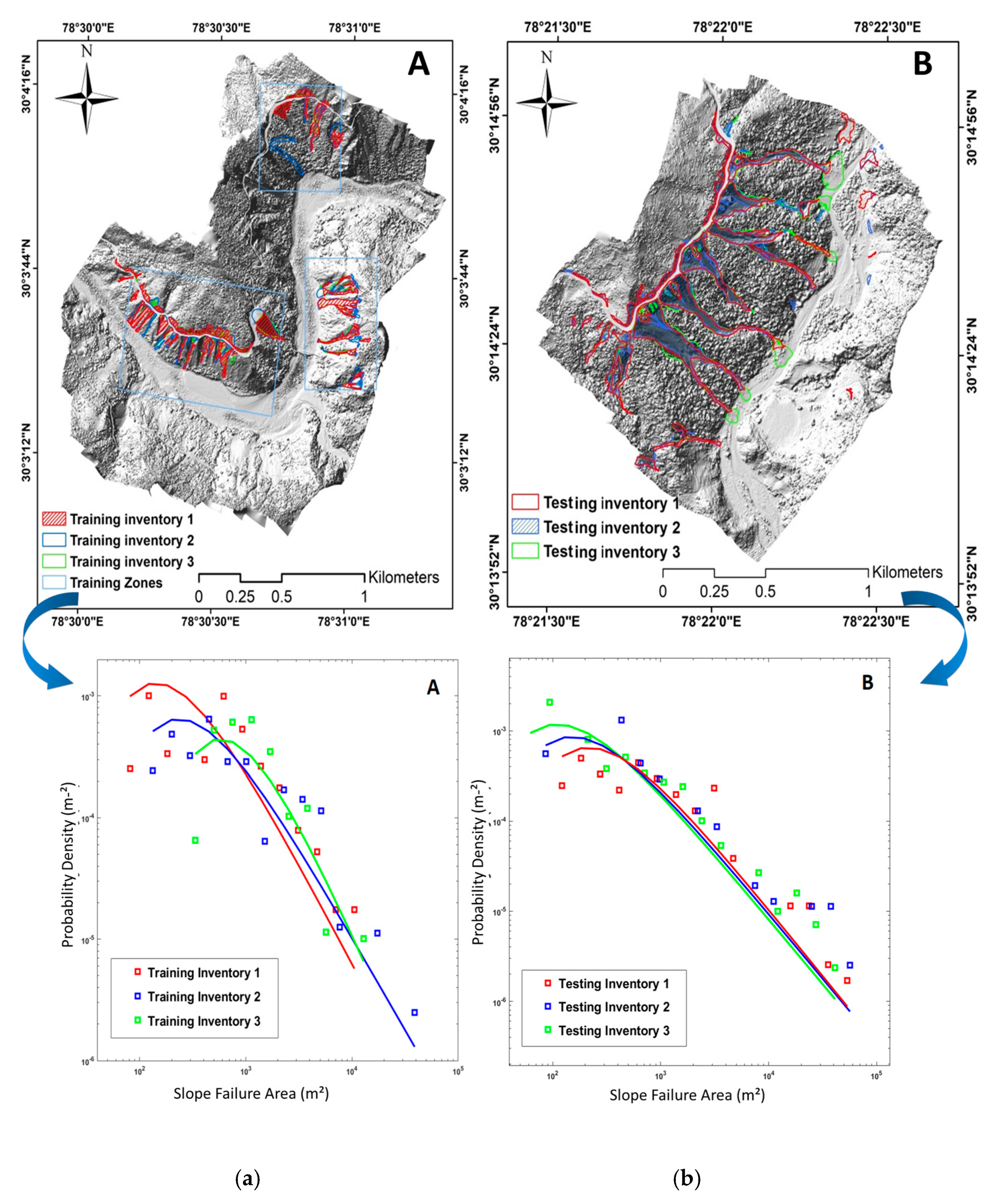
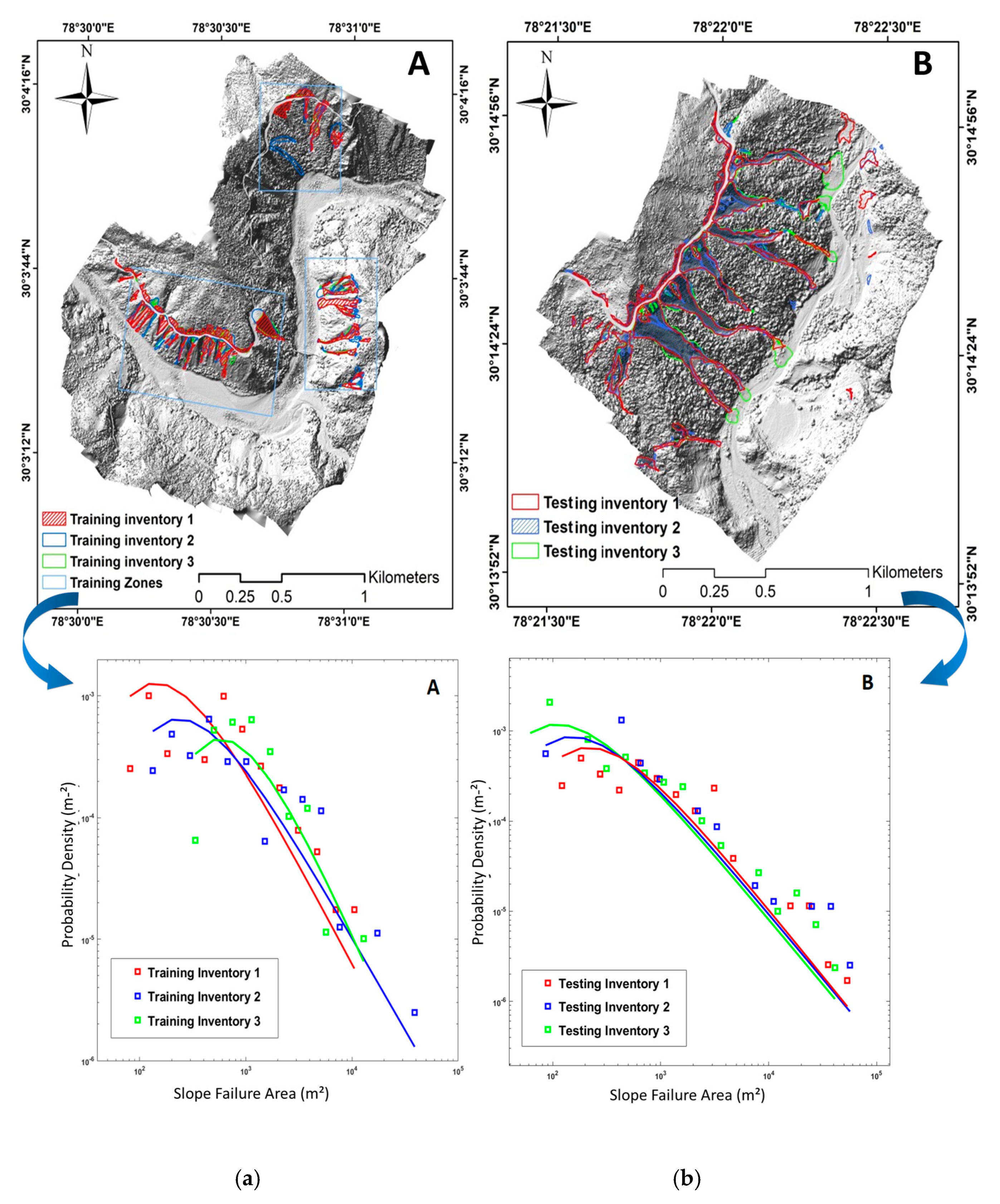
3.4. Inventory Generation for Training and Testing
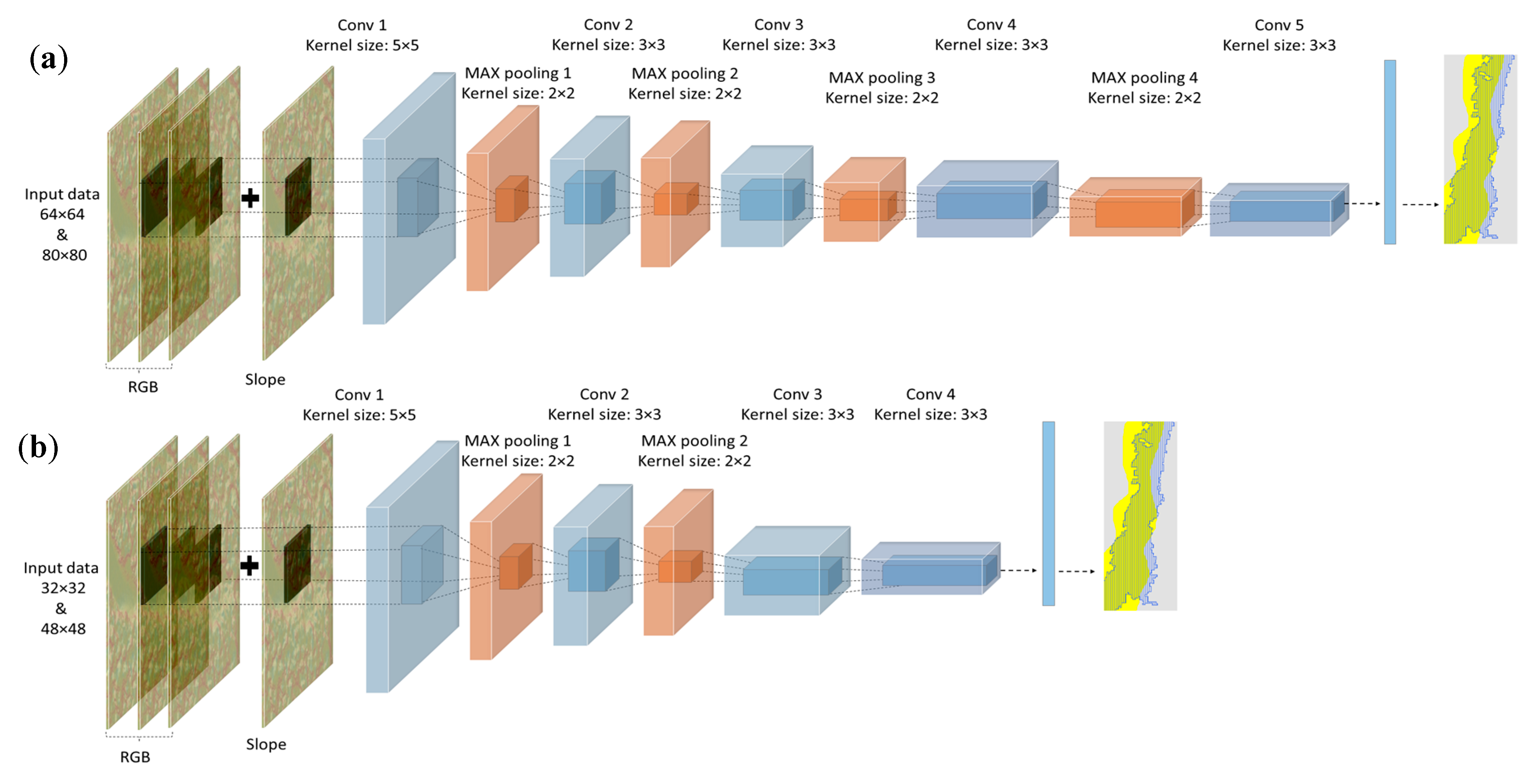
3.5. Convolutional Neural Network (CNN)
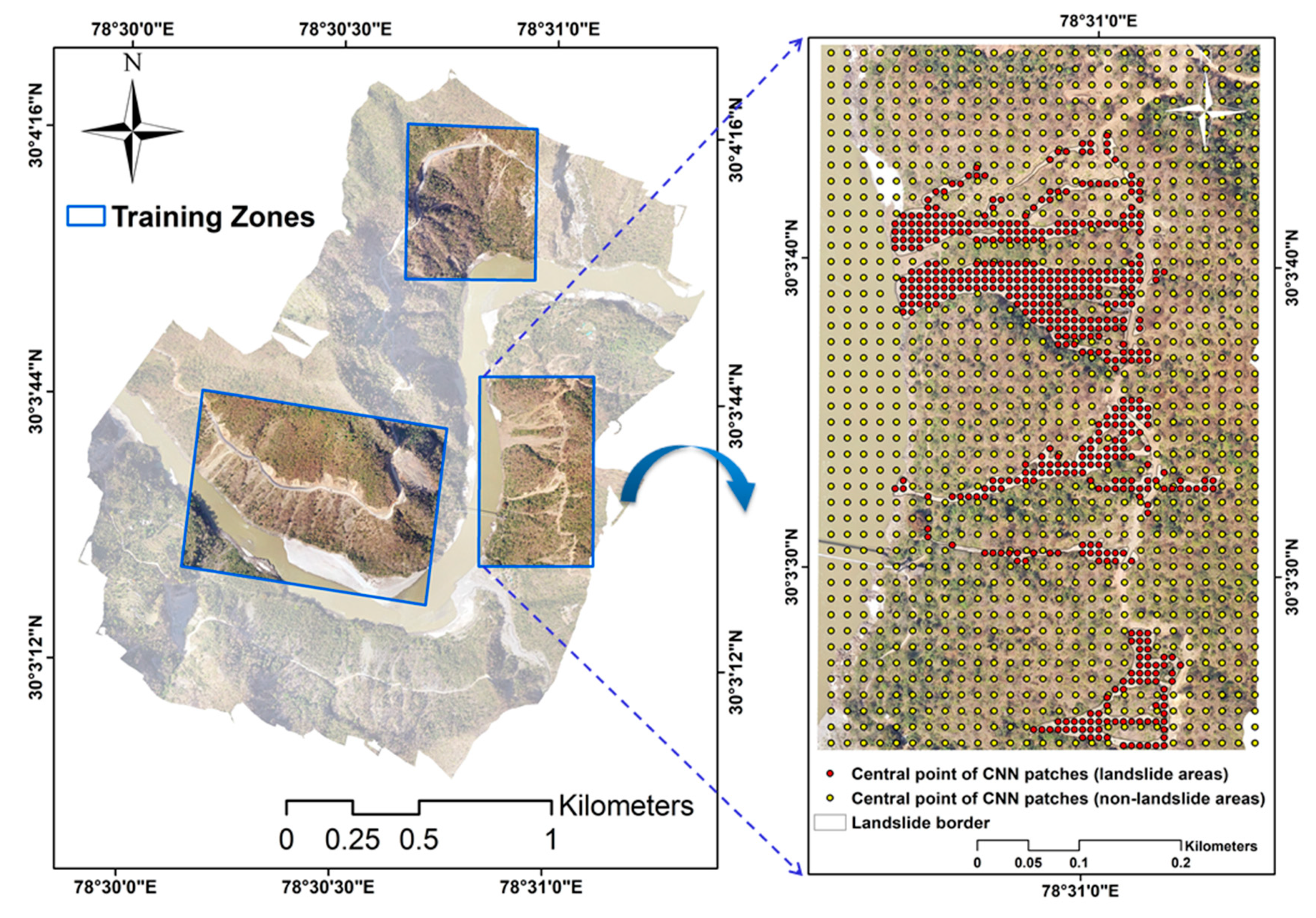
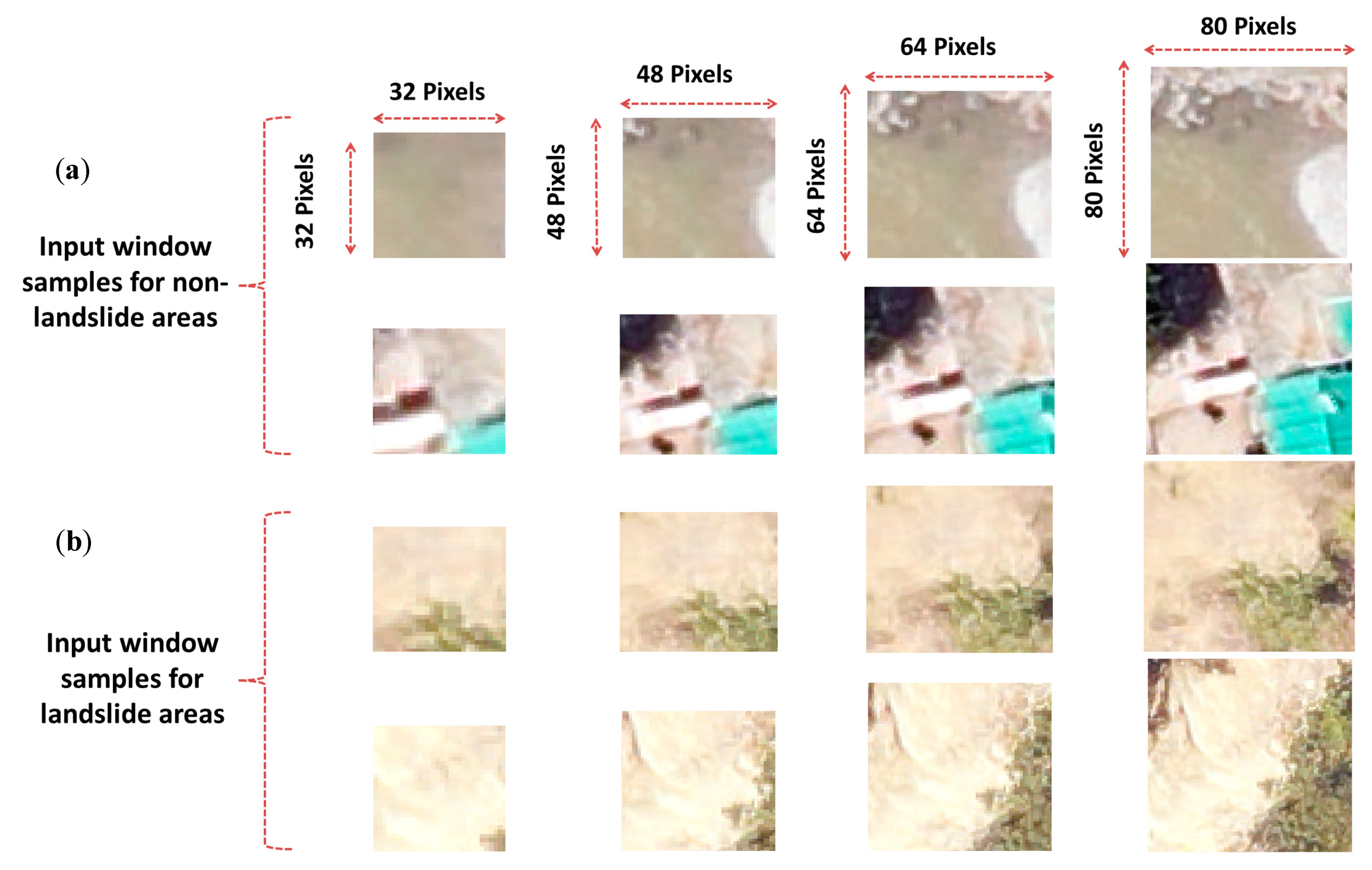
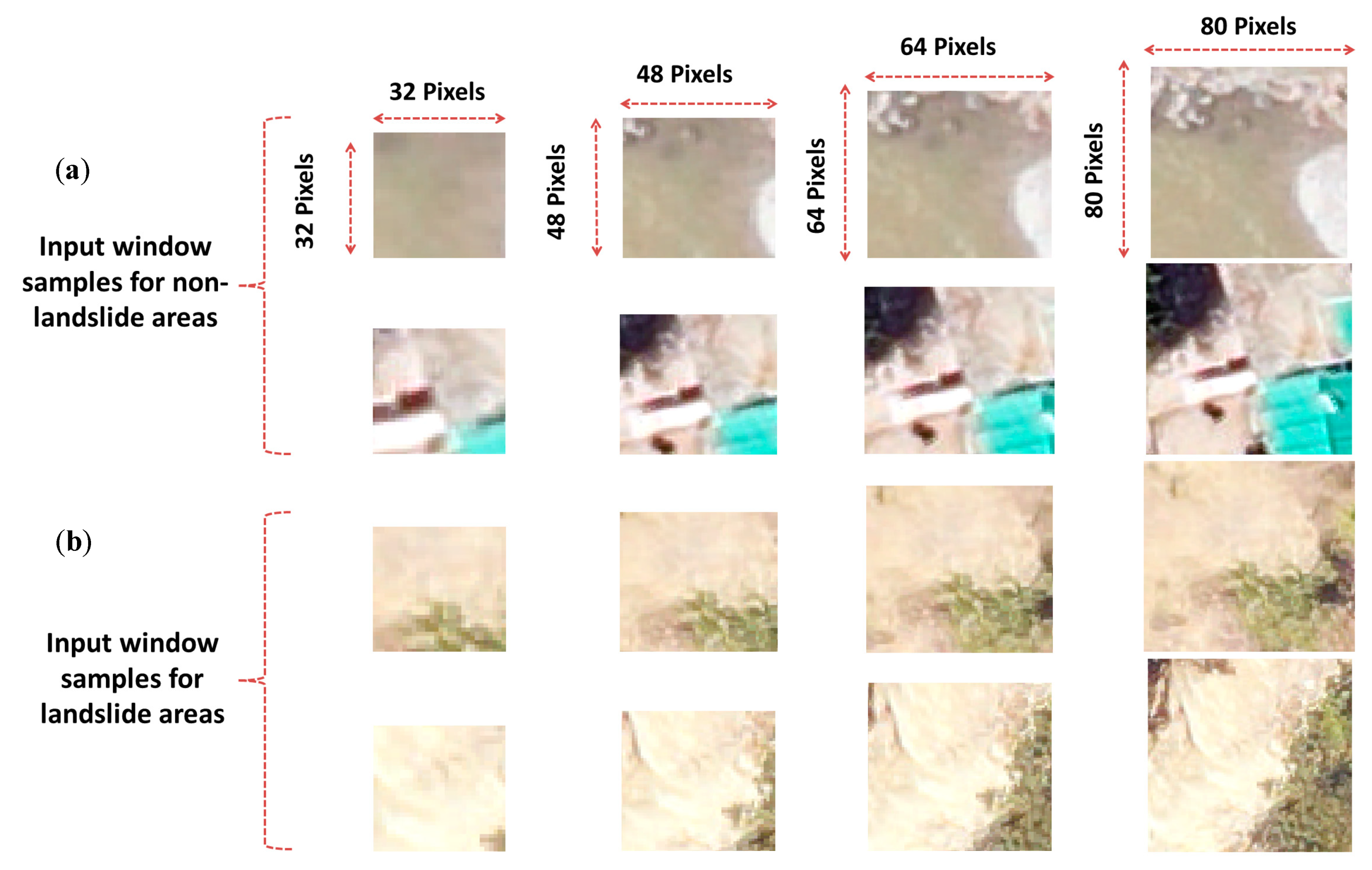
3.5.1. Optimizing Sample Patch Selection
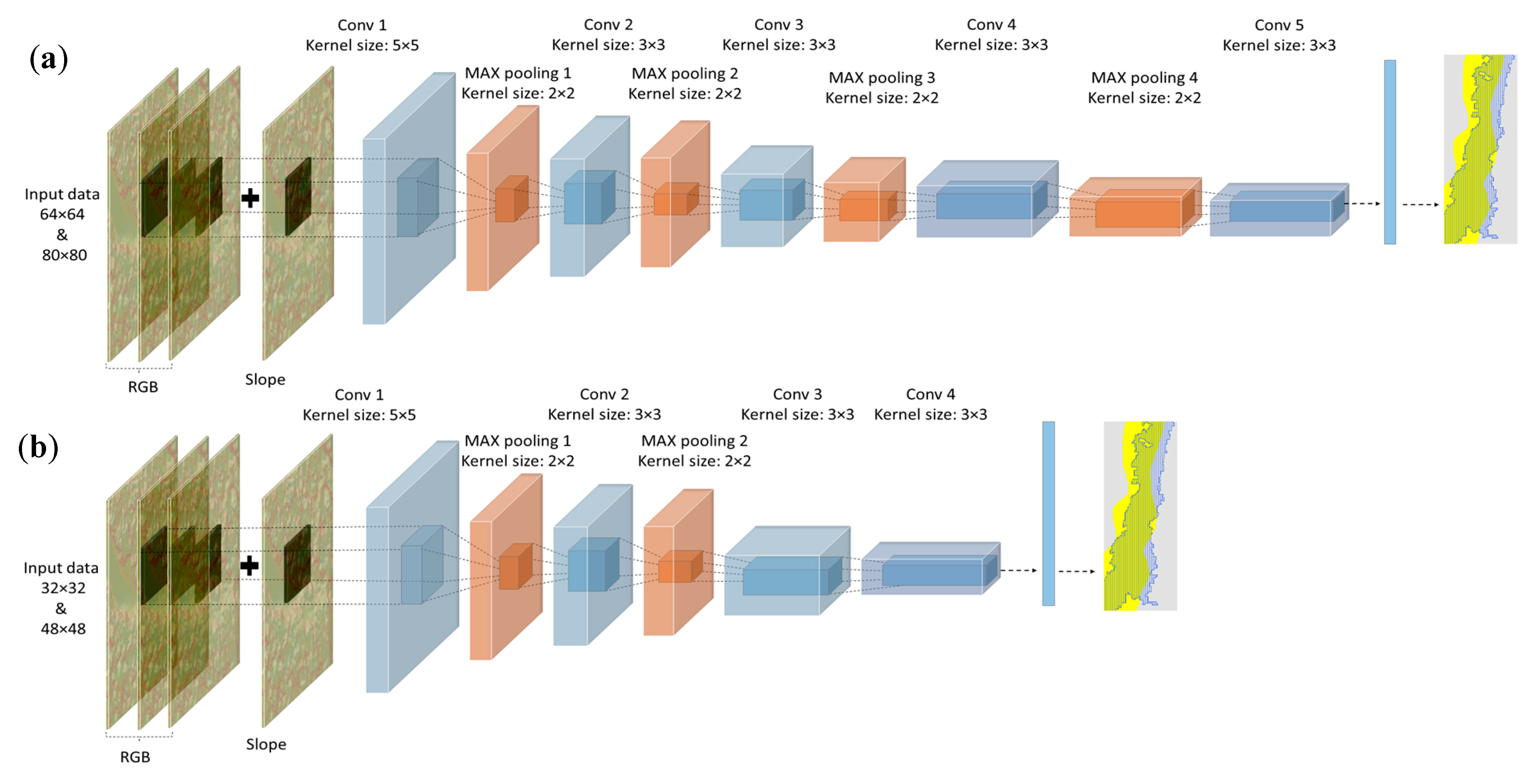
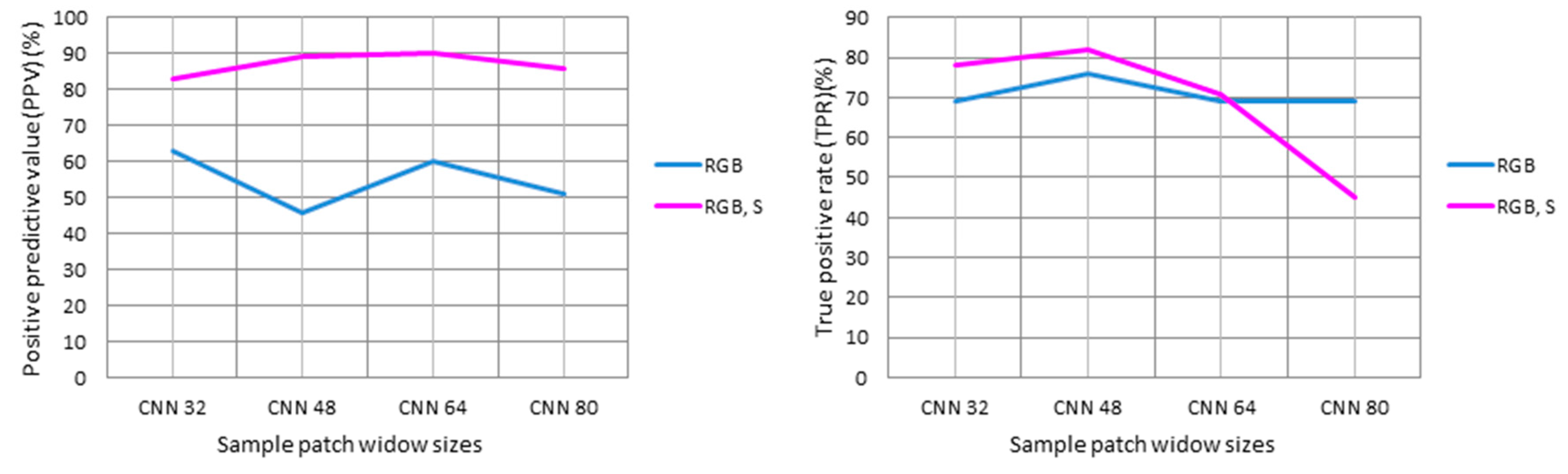
3.5.2. CNNs with Different Patch Window Sizes and Network Depths
4. Results
4.1. Selection of Optimal Inventories
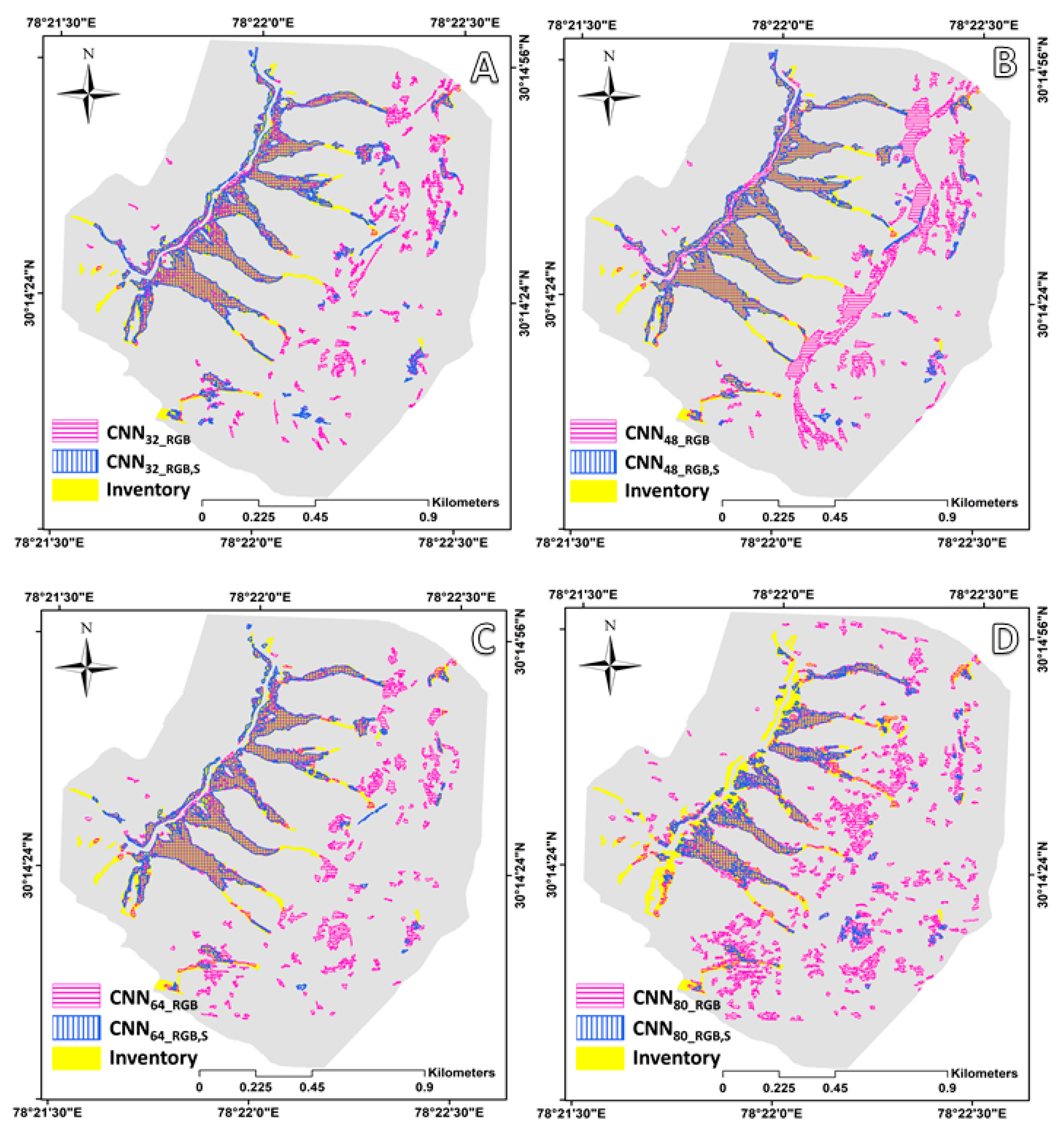
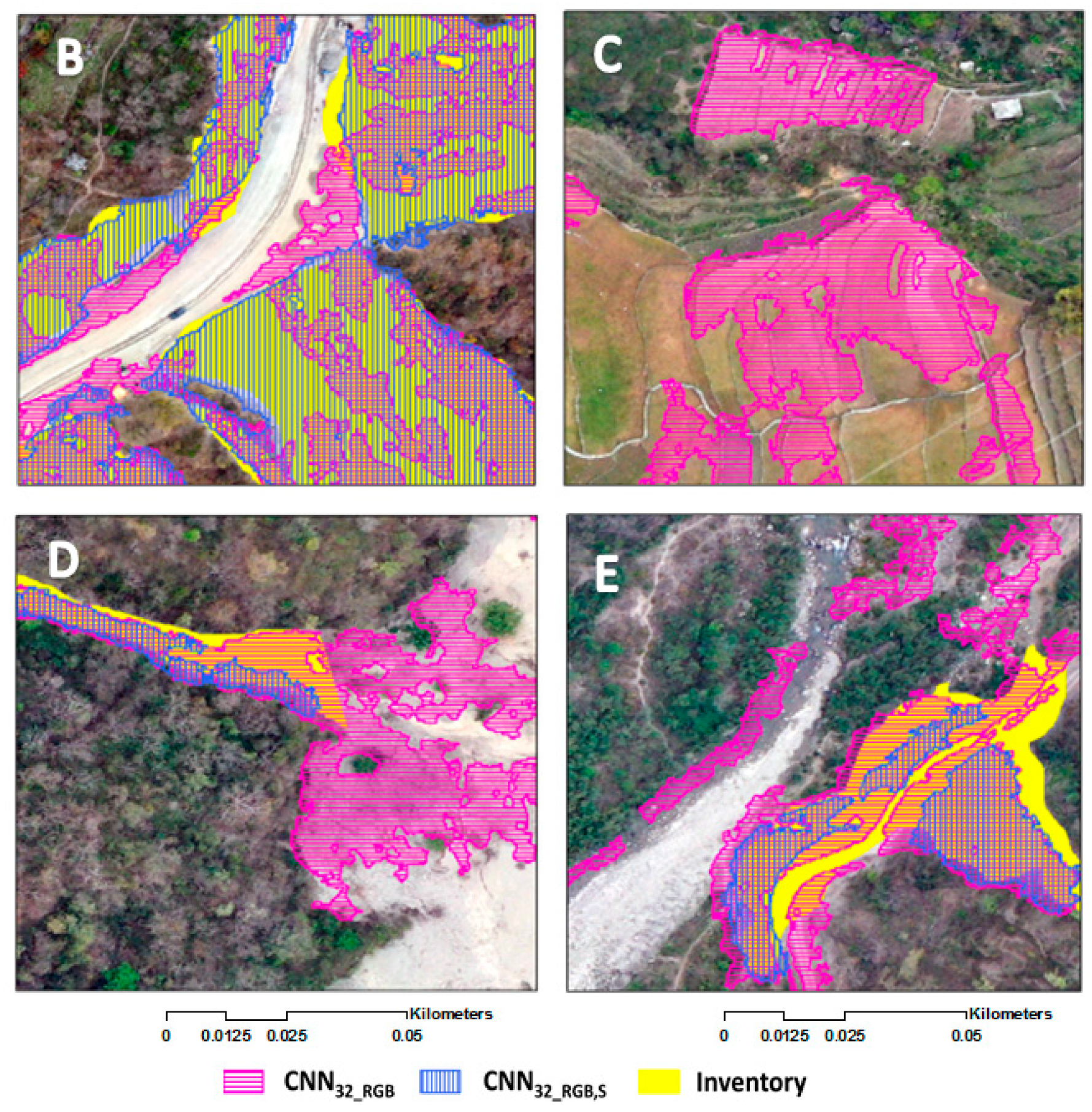
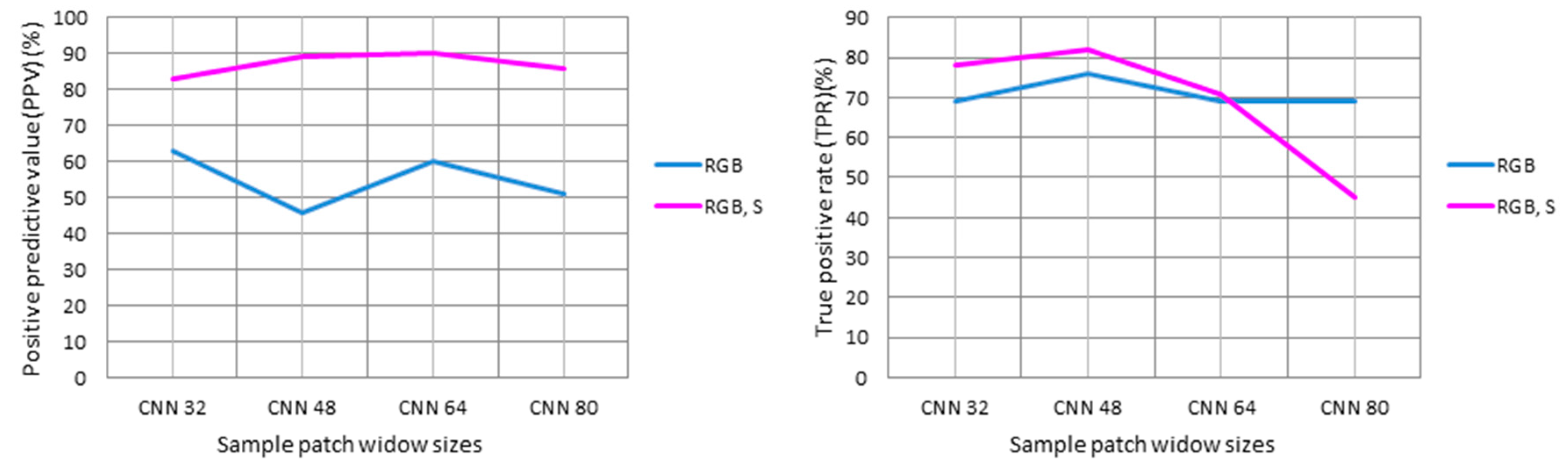
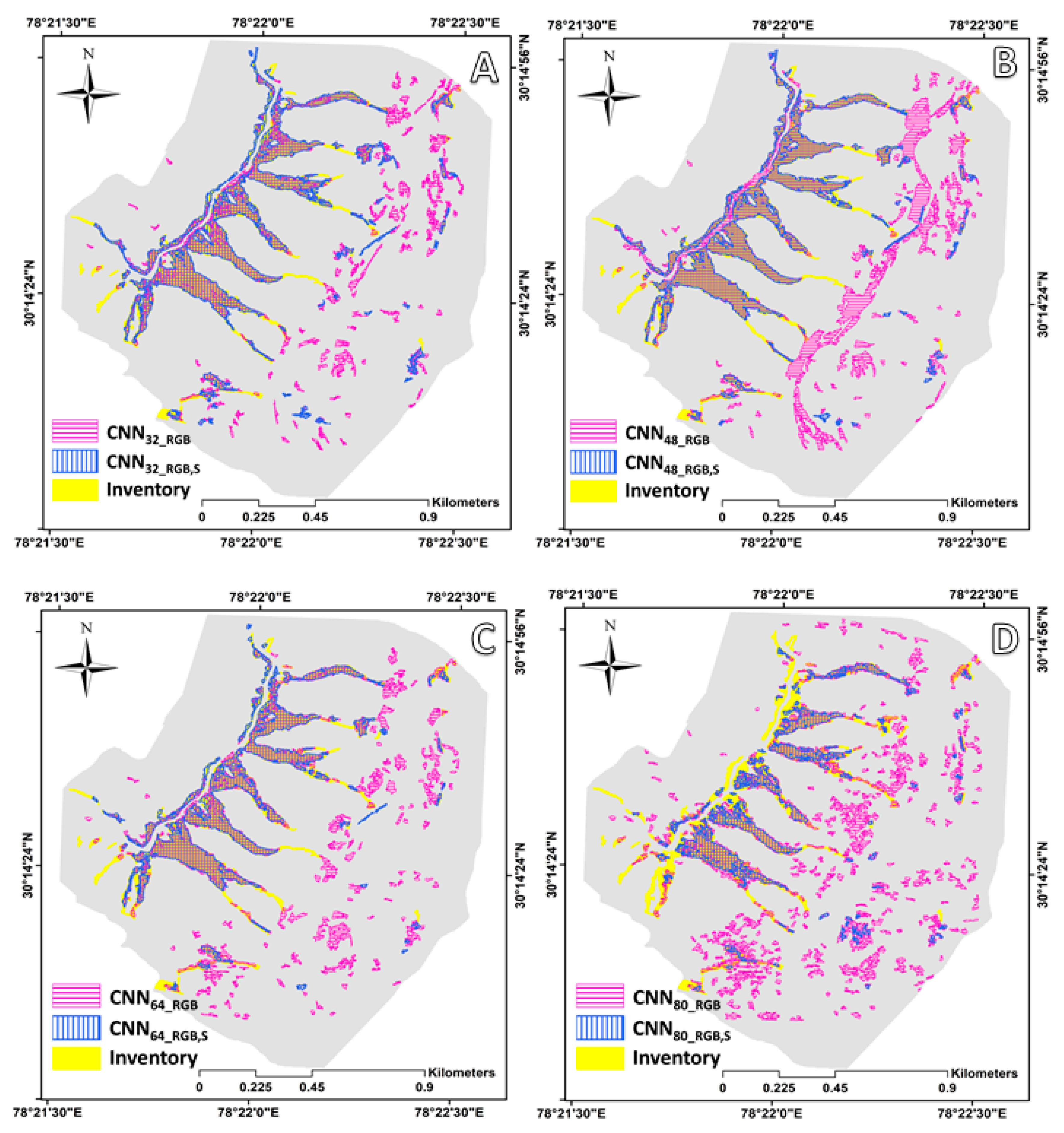
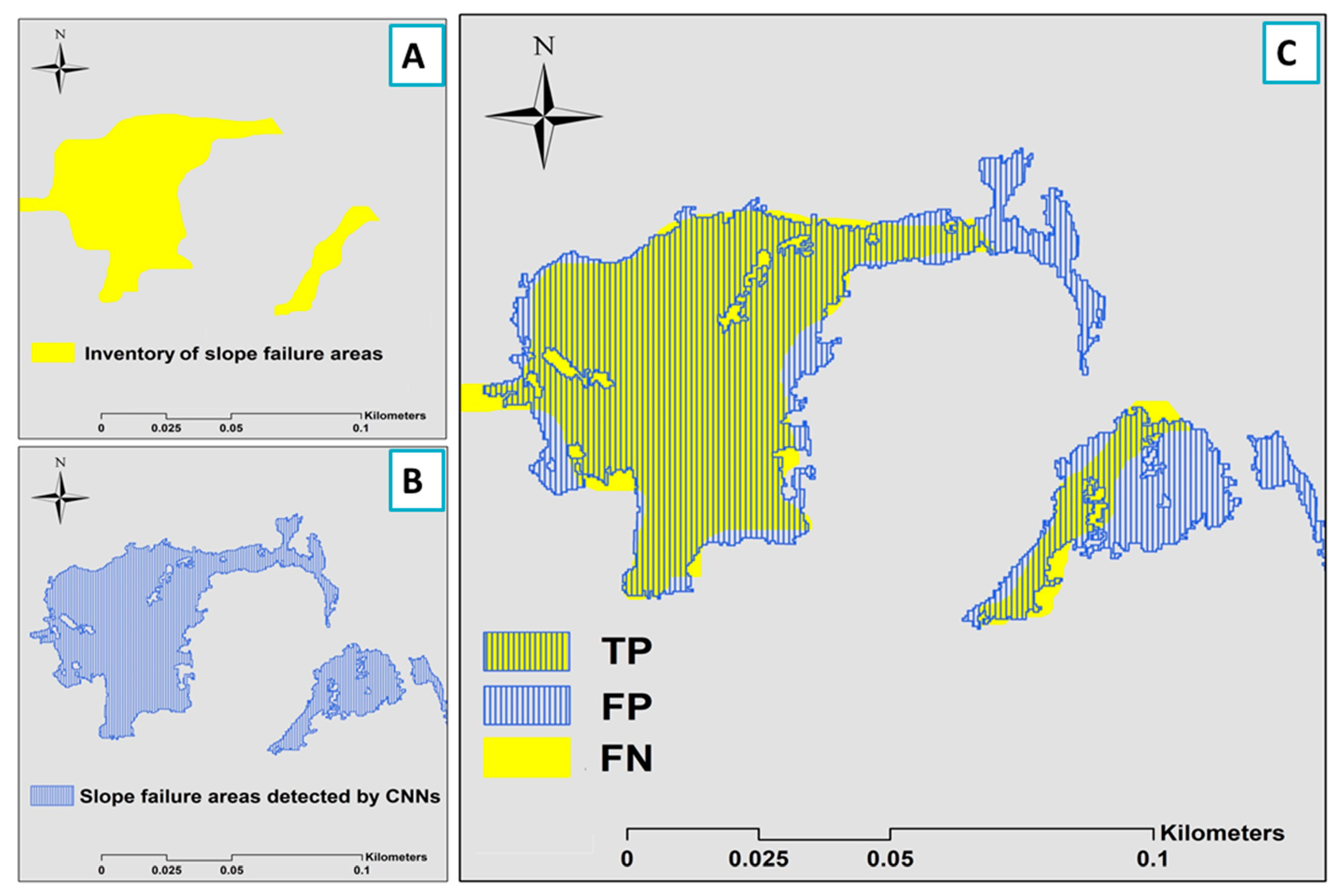
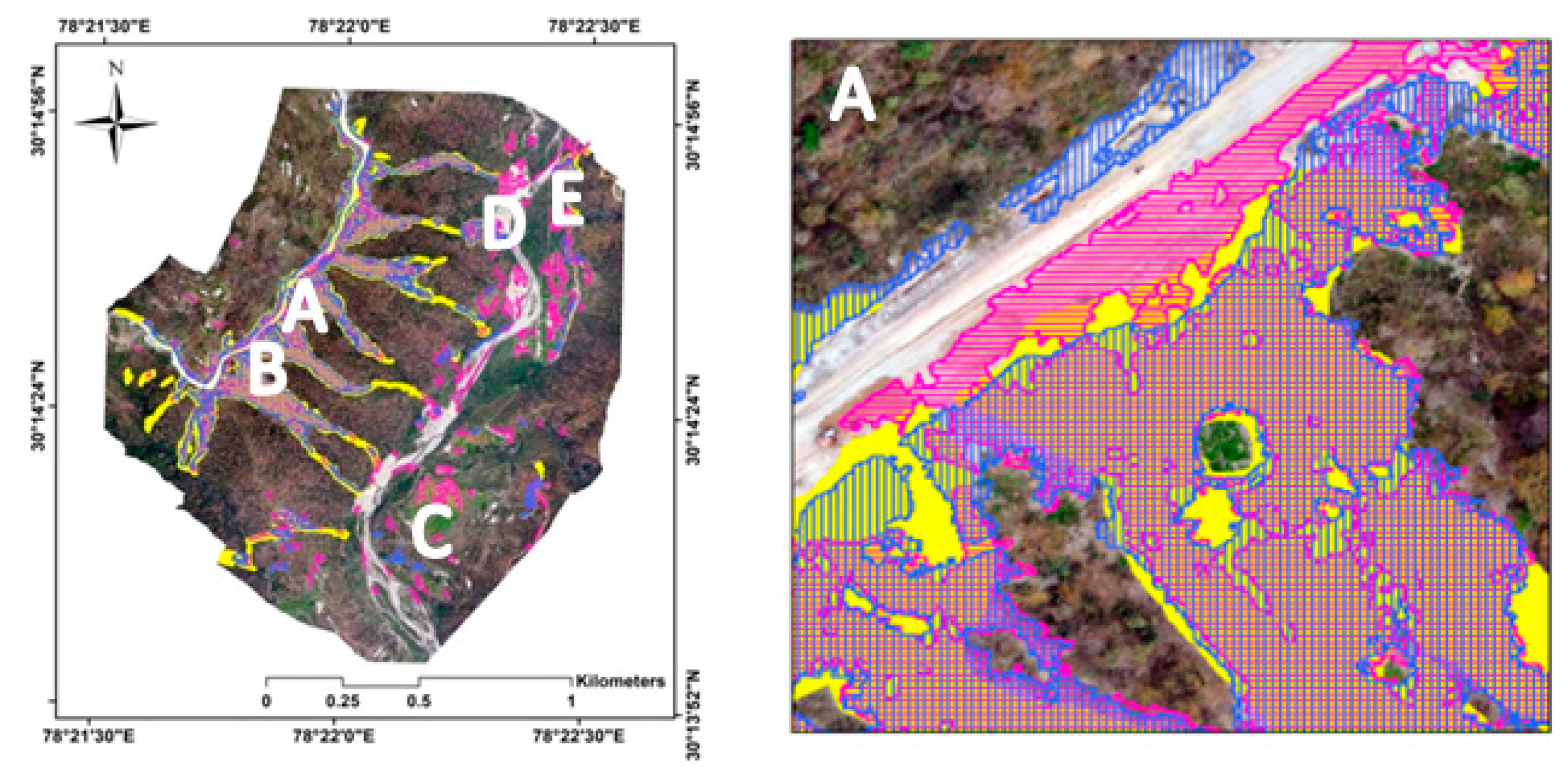
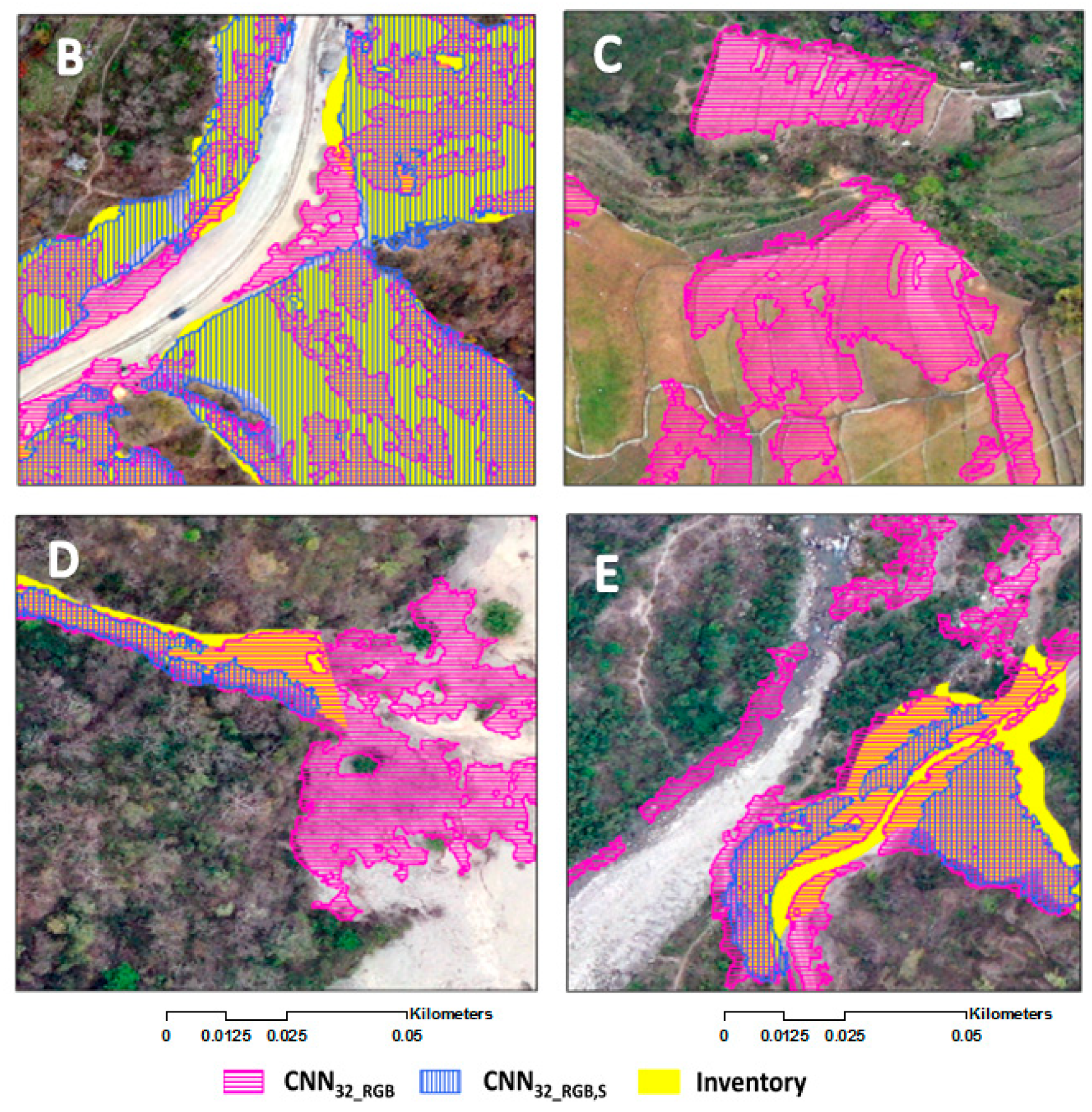
4.2. Results of Slope Failure Detection
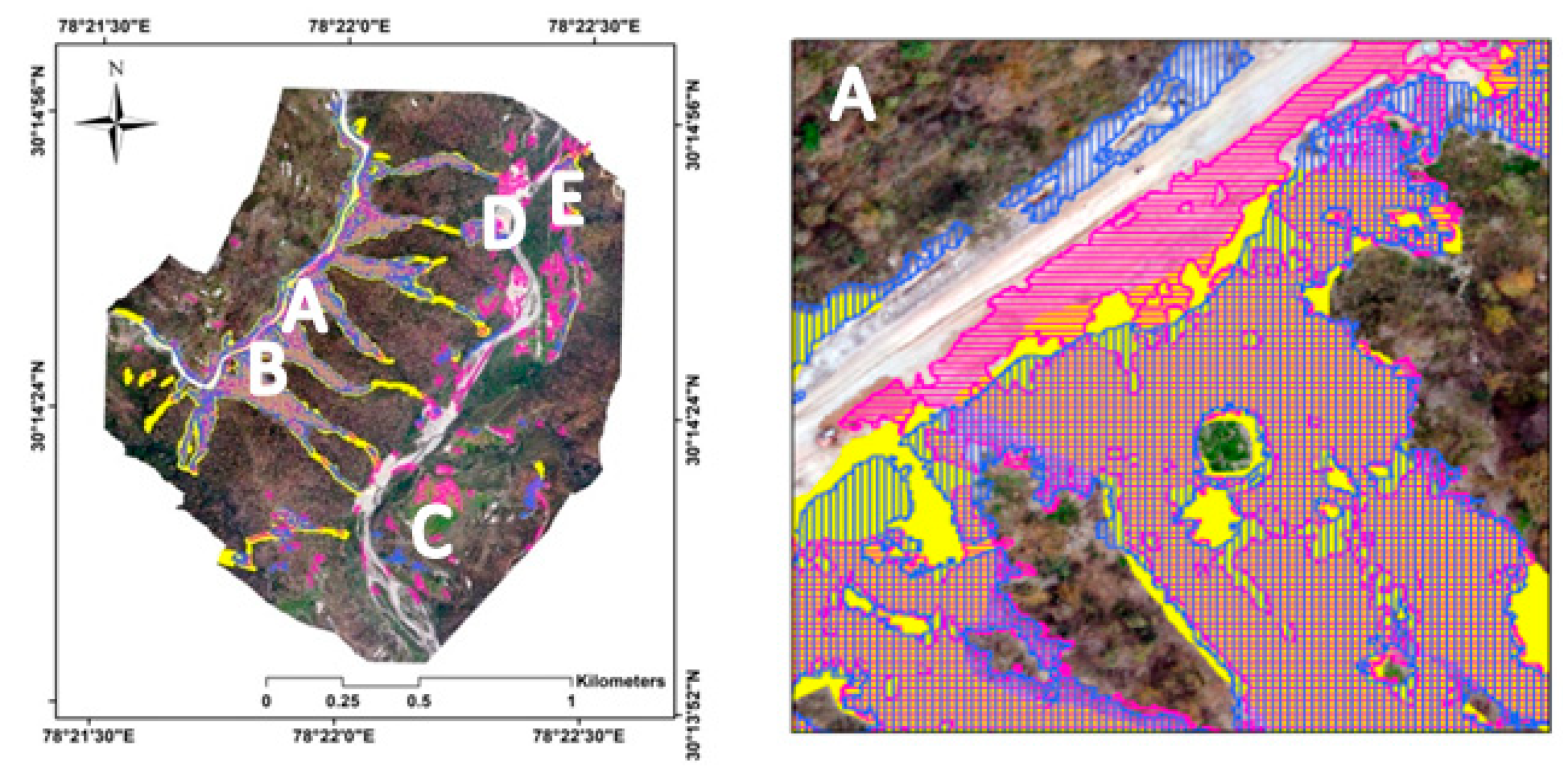
5. Comparison of Results Obtained by Manual Detection with Those Obtained Using CNNs
6. Discussion
6.1. Sample Patch Selection and Optimality in CNNs
6.2. UAV Remotely Sensed Multiple Training Data Sets
6.3. Limitations of This Research
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sarro, R.; Riquelme, A.; García-Davalillo, J.C.; Mateos, R.M.; Tomás, R.; Pastor, J.L.; Cano, M.; Herrera, G. Rockfall simulation based on uav photogrammetry data obtained during an emergency declaration: Application at a cultural heritage site. Remote Sens. 2018, 10, 1923. [Google Scholar] [CrossRef]
- Miura, H. Fusion analysis of optical satellite images and digital elevation model for quantifying volume in debris flow disaster. Remote Sens. 2019, 11, 1096. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Rahmati, O. Prediction of the landslide susceptibility: Which algorithm, which precision? Catena 2018, 162, 177–192. [Google Scholar] [CrossRef]
- Watson, C.S.; Kargel, J.S.; Tiruwa, B. Uav-derived himalayan topography: Hazard assessments and comparison with global dem products. Drones 2019, 3, 18. [Google Scholar] [CrossRef]
- Meena, S.R.; Mishra, B.K.; Tavakkoli Piralilou, S. A hybrid spatial multi-criteria evaluation method for mapping landslide susceptible areas in kullu valley, himalayas. Geosciences 2019, 9, 156. [Google Scholar] [CrossRef]
- Mezaal, M.; Pradhan, B.; Rizeei, H. Improving landslide detection from airborne laser scanning data using optimized dempster–shafer. Remote Sens. 2018, 10, 1029. [Google Scholar] [CrossRef]
- Chen, W.; Shahabi, H.; Zhang, S.; Khosravi, K.; Shirzadi, A.; Chapi, K.; Pham, B.T.; Zhang, T.; Zhang, L.; Chai, H.; et al. Landslide susceptibility modeling based on gis and novel bagging-based kernel logistic regression. Applied Sci. 2018, 8, 2540. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Rostamzadeh, H.; Blaschke, T.; Gholaminia, K.; Aryal, J. A new gis-based data mining technique using an adaptive neuro-fuzzy inference system (anfis) and k-fold cross-validation approach for land subsidence susceptibility mapping. Nat. Hazards 2018, 94, 497–517. [Google Scholar] [CrossRef]
- Meena, S.R.; Ghorbanzadeh, O.; Blaschke, T. A comparative study of statistics-based landslide susceptibility models: A case study of the region affected by the gorkha earthquake in nepal. ISPRS Int. J. of Geo-Inf. 2019, 8, 94. [Google Scholar] [CrossRef]
- Feizizadeh, B.; Roodposhti, M.S.; Jankowski, P.; Blaschke, T. A gis-based extended fuzzy multi-criteria evaluation for landslide susceptibility mapping. Comput. & Geosci. 2014, 73, 208–221. [Google Scholar]
- Plank, S.; Twele, A.; Martinis, S. Landslide mapping in vegetated areas using change detection based on optical and polarimetric sar data. Remote Sens. 2016, 8, 307. [Google Scholar] [CrossRef]
- Fernández, T.; Pérez, J.L.; Cardenal, J.; Gómez, J.M.; Colomo, C.; Delgado, J. Analysis of landslide evolution affecting olive groves using uav and photogrammetric techniques. Remote Sens. 2016, 8, 837. [Google Scholar] [CrossRef]
- Agudo, P.U.; Pajas, J.A.; Pérez-Cabello, F.; Redón, J.V.; Lebrón, B.E. The potential of drones and sensors to enhance detection of archaeological cropmarks: A comparative study between multi-spectral and thermal imagery. Drones 2018, 2, 29. [Google Scholar] [CrossRef]
- Windrim, L.; Bryson, M.; McLean, M.; Randle, J.; Stone, C. Automated mapping of woody debris over harvested forest plantations using uavs, high-resolution imagery, and machine learning. Remote Sens. 2019, 11, 733. [Google Scholar] [CrossRef]
- Zhang, Y.; Yue, P.; Zhang, G.; Guan, T.; Lv, M.; Zhong, D. Augmented reality mapping of rock mass discontinuities and rockfall susceptibility based on unmanned aerial vehicle photogrammetry. Remote Sens. 2019, 11, 1311. [Google Scholar] [CrossRef]
- Brovkina, O.; Cienciala, E.; Surový, P.; Janata, P. Unmanned aerial vehicles (uav) for assessment of qualitative classification of norway spruce in temperate forest stands. Geo. Spat. Inf. Sci. 2018, 21, 12–20. [Google Scholar] [CrossRef]
- Lin, J.; Tao, H.; Wang, Y.; Huang, Z. Practical application of unmanned aerial vehicles for mountain hazards survey. In Proceedings of the International Conference on Geoinformatics, Beijing, China, 18 June 2010. [Google Scholar]
- Yang, Z.-h.; Lan, H.-x.; Gao, X.; Li, L.-p.; Meng, Y.-s.; Wu, Y.-m. Urgent landslide susceptibility assessment in the 2013 lushan earthquake-impacted area, sichuan province, china. Nat. Hazards 2015, 75, 2467–2487. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using spot-5 hrg imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Blaschke, T.; Piralilou, S.T. The near-decomposability paradigm re-interpreted for place-based gis. In Proceedings of the 1st Workshop on Platial Analysis (PLATIAL’18), Heidelberg, Germany, 20–21 September 2018. [Google Scholar]
- Hölbling, D.; Füreder, P.; Antolini, F.; Cigna, F.; Casagli, N.; Lang, S. A semi-automated object-based approach for landslide detection validated by persistent scatterer interferometry measures and landslide inventories. Remote Sens. 2012, 4, 1310–1336. [Google Scholar] [CrossRef]
- Dou, J.; Chang, K.-T.; Chen, S.; Yunus, A.; Liu, J.-K.; Xia, H.; Zhu, Z. Automatic case-based reasoning approach for landslide detection: Integration of object-oriented image analysis and a genetic algorithm. Remote Sens. 2015, 7, 4318. [Google Scholar] [CrossRef]
- Qayyum, A.; Malik, A.M.; Saad, N.; Mazher, M. Designing deep cnn models based on sparse coding for aerial imagery: A deep-features reduction approach. Eur J Remote Sens 2019, 52, 221–239. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Tiede, D.; Dabiri, Z.; Sudmanns, M.; Lang, S. Dwelling extraction in refugee camps using cnn-first experiences and lessons learnt. Int. Arch. the Photogramm. Remote Sens. & Spat. Inf. Sci. 2018, 42, 161–166. [Google Scholar]
- Du, Z.; Yang, J.; Ou, C.; Zhang, T. Smallholder crop area mapped with a semantic segmentation deep learning method. Remote Sens. 2019, 11, 888. [Google Scholar] [CrossRef]
- Guirado, E.; Tabik, S.; Alcaraz-Segura, D.; Cabello, J.; Herrera, F. Deep-learning convolutional neural networks for scattered shrub detection with google earth imagery. arXiv 2017, arXiv:1706.00917. Available online: https://arxiv.org/abs/1706.00917 (accessed on 29 July 2019).
- Yang, H.L.; Lunga, D.; Yuan, J. Toward country scale building detection with convolutional neural network using aerial images. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of different machine learning methods and deep-learning convolutional neural networks for landslide detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Ding, A.; Zhang, Q.; Zhou, X.; Dai, B. Automatic recognition of landslide based on cnn and texture change detection. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016. [Google Scholar]
- Yang, Q.; Shi, L.; Han, J.; Zha, Y.; Zhu, P. Deep convolutional neural networks for rice grain yield estimation at the ripening stage using uav-based remotely sensed images. Field Crops Res. 2019, 235, 142–153. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Feizizadeh, B.; Blaschke, T. Multi-criteria risk evaluation by integrating an analytical network process approach into gis-based sensitivity and uncertainty analyses. Geomat. Nat. Hazards Risk 2018, 9, 127–151. [Google Scholar] [CrossRef]
- Malamud, B.D.; Turcotte, D.L.; Guzzetti, F.; Reichenbach, P. Landslide inventories and their statistical properties. Earth Surf Process Landf. 2004, 29, 687–711. [Google Scholar] [CrossRef]
- Tanyaş, H.; van Westen, C.J.; Allstadt, K.E.; Jibson, R.W. Factors controlling landslide frequency–area distributions. Earth Surf Process Landf. 2019, 44, 900–917. [Google Scholar] [CrossRef]
- Van Den Eeckhaut, M.; Poesen, J.; Govers, G.; Verstraeten, G.; Demoulin, A. Characteristics of the size distribution of recent and historical landslides in a populated hilly region. Earth Planet Sci. Lett. 2007, 256, 588–603. [Google Scholar] [CrossRef]
- Malamud, B.D.; Turcotte, D.L.; Guzzetti, F.; Reichenbach, P. Landslides, earthquakes, and erosion. Earth Planet Sci. Lett. 2004, 229, 45–59. [Google Scholar] [CrossRef]
- Lv, X.; Ming, D.; Chen, Y.; Wang, M. Very high resolution remote sensing image classification with seeds-cnn and scale effect analysis for superpixel cnn classification. Int. J. Remote Sens. 2018, 1–26. [Google Scholar] [CrossRef]
- Depeursinge, A.; Vargas, A.; Platon, A.; Geissbuhler, A.; Poletti, P.-A.; Müller, H. Building a reference multimedia database for interstitial lung diseases. Comput. Med. Imaging Graphics. 2012, 36, 227–238. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.; Xia, W.; Huang, J.; Ni, B.; Dong, J.; Zhao, Y.; Yan, S. Cnn: Single-label to multi-label. arXiv 2014, arXiv:1406.5726. Available online: https://arxiv.org/abs/1406.5726 (accessed on 29 July 2019).
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. An object-based convolutional neural network (ocnn) for urban land use classification. Remote Sens. Environ. 2018, 216, 57–70. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T. Optimizing sample patches selection of cnn to improve the miou on landslide detection. In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management: GISTAM, Heraklion, Crete, Greece, 3–5 May 2019; Volume 1, p. 8. Available online: https://www.researchgate.net/profile/Omid_Ghorbanzadeh/publication/333408273_Optimizing_Sample_Patches_Selection_of_CNN_to_Improve_the_mIOU_on_Landslide_Detection/links/5cee466a458515026a63a0c4/Optimizing-Sample-Patches-Selection-of-CNN-to-Improve-the-mIOU-on-Landslide-Detection.pdf (accessed on 29 July 2019).
- Adam, G.; Lorraine, J. Understanding neural architecture search techniques. arXiv 2019, arXiv:1904.00438. Available online: https://arxiv.org/pdf/1904.00438.pdf (accessed on 29 July 2019).
- Hang, R.; Liu, Q.; Hong, D.; Ghamisi, P. Cascaded recurrent neural networks for hyperspectral image classification. IEEE Trans Geosci Remote Sens. 2019, 2019.57, 5384–5394. [Google Scholar] [CrossRef]
- Weng, Y.; Zhou, T.; Liu, L.; Xia, C. Automatic convolutional neural architecture search for image classification under different scenes. IEEE Access 2019, 7, 38495–38506. [Google Scholar] [CrossRef]
- Csillik, O.; Cherbini, J.; Johnson, R.; Lyons, A.; Kelly, M. Identification of citrus trees from unmanned aerial vehicle imagery using convolutional neural networks. Drones 2018, 2, 39. [Google Scholar] [CrossRef]
- Lormand, C.; Zellmer, G.F.; Németh, K.; Kilgour, G.; Mead, S.; Palmer, A.S.; Sakamoto, N.; Yurimoto, H.; Moebis, A. Weka trainable segmentation plugin in imagej: A semi-automatic tool applied to crystal size distributions of microlites in volcanic rocks. Microsc. Microanal. 2018, 24, 667–675. [Google Scholar] [CrossRef]
- Leroy, B.; Delsol, R.; Hugueny, B.; Meynard, C.N.; Barhoumi, C.; Barbet-Massin, M.; Bellard, C. Without quality presence–absence data, discrimination metrics such as tss can be misleading measures of model performance. J. Biogeogr. 2018, 45, 1994–2002. [Google Scholar] [CrossRef]
- Lindner, G.; Schraml, K.; Mansberger, R.; Hübl, J. Uav monitoring and documentation of a large landslide. Applied Geomat. 2016, 8, 1–11. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Model | Resolution | Focal Length | Pixel Size |
|---|---|---|---|
| L1D-20c (10.26 mm) | 5472 × 3648 | 10.26 mm | 2.41 × 2.41 μm |
| Information | Training Area | Testing Area |
|---|---|---|
| Area name | Chandpur | Fakot |
| Number of images | 338 | 169 |
| Flying altitude | 300 m | 300 m |
| Ground resolution | 11.2 cm/ pixel | 12.2 cm/ pixel |
| Coverage area | 3.7 km2 | 2.45 km2 |
| Camera stations | 336 | 169 |
| Tie points | 243,141 | 121,041 |
| Projections | 862,863 | 434,528 |
| Reprojection error | 0.52 pixel | 0.688 pixel |
| Sensor | 1-inch CMOS | 1-inch CMOS |
| Date | 09 April 2019 | 08 April 2019 |
| Inventories | Total Number NLT | Total Area (km2) | Min. Area (m2) | Max. Area (m2) | Power-Law Exponent (β) | Rollover Point (m2) |
|---|---|---|---|---|---|---|
| Training Inventory 1 | 49 | 89.51 | 81 | 9351 | 1.48 | 256.74 |
| Training Inventory 2 | 31 | 119.64 | 133 | 32731 | 1.44 | 388.19 |
| Training Inventory 3 | 46 | 83.44 | 334 | 9560 | 1.44 | 1258.70 |
| Testing Inventory 1 | 33 | 198.49 | 122 | 40715 | 1.66 | 344.30 |
| Testing Inventory 2 | 124 | 717.13 | 144 | 35011 | 1.53 | 171.31 |
| Testing Inventory 3 | 21 | 210.88 | 86 | 49448 | 2.02 | 234.88 |
| Method | Count | Minimum (ha) | Maximum (ha) | Sum (ha) | Mean (ha) | Standard Deviation (ha) |
|---|---|---|---|---|---|---|
| 157 | 0.0145 | 5.419 | 20.5719 | 0.131 | 0.521 | |
| 58 | 0.0148 | 12.4792 | 17.6917 | 0.305 | 1.6223 | |
| 123 | 0.0144 | 15.3149 | 30.7813 | 0.2487 | 1.3881 | |
| 57 | 0.0149 | 11.4919 | 17.1348 | 0.2919 | 1.5045 | |
| 175 | 0.0144 | 35.042 | 21.4021 | 0.1202 | 0.4489 | |
| 50 | 0.0144 | 7.4502 | 14.8108 | 0.2962 | 1.1267 | |
| 337 | 0.0144 | 3.204 | 25.2534 | 0.0749 | 0.248 | |
| 84 | 0.0144 | 2.5712 | 9.9036 | 0.1156 | 0.3461 | |
| Inventory | 48 | 0.0144 | 3.0945 | 18.7167 | 0.3899 | 0.6439 |
| Method | TP (ha) | FP (ha) | FN (ha) |
|---|---|---|---|
| 12.9236 | 7.6482 | 5.7929 | |
| 14.6846 | 3.0071 | 4.032 | |
| 14.1765 | 16.6048 | 4.54 | |
| 15.3201 | 1.8147 | 3.3965 | |
| 12.7817 | 8.6204 | 5.9349 | |
| 13.3141 | 1.4967 | 5.4025 | |
| 12.9231 | 12.3303 | 5.7935 | |
| 8.4899 | 1.4137 | 10.2267 |
| Method | PPV | TPR | F-Score | OPR | UPR | mIOU |
|---|---|---|---|---|---|---|
| 0.63 | 0.69 | 0.66 | 0.37 | 0.31 | 0.49 | |
| 0.83 | 0.78 | 0.81 | 0.17 | 0.22 | 0.67 | |
| 0.46 | 0.76 | 0.57 | 0.54 | 0.24 | 0.41 | |
| 0.89 | 0.82 | 0.85 | 0.1 | 0.18 | 0.74 | |
| 0.60 | 0.69 | 0.64 | 0.4 | 0.32 | 0.47 | |
| 0.90 | 0.71 | 0.79 | 0.1 | 0.29 | 0.65 | |
| 0.51 | 0.69 | 0.59 | 0.49 | 0.31 | 0.42 | |
| 0.86 | 0.45 | 0.59 | 0.14 | 0.55 | 0.42 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghorbanzadeh, O.; Meena, S.R.; Blaschke, T.; Aryal, J. UAV-Based Slope Failure Detection Using Deep-Learning Convolutional Neural Networks. Remote Sens. 2019, 11, 2046. https://doi.org/10.3390/rs11172046
Ghorbanzadeh O, Meena SR, Blaschke T, Aryal J. UAV-Based Slope Failure Detection Using Deep-Learning Convolutional Neural Networks. Remote Sensing. 2019; 11(17):2046. https://doi.org/10.3390/rs11172046
Chicago/Turabian StyleGhorbanzadeh, Omid, Sansar Raj Meena, Thomas Blaschke, and Jagannath Aryal. 2019. "UAV-Based Slope Failure Detection Using Deep-Learning Convolutional Neural Networks" Remote Sensing 11, no. 17: 2046. https://doi.org/10.3390/rs11172046
APA StyleGhorbanzadeh, O., Meena, S. R., Blaschke, T., & Aryal, J. (2019). UAV-Based Slope Failure Detection Using Deep-Learning Convolutional Neural Networks. Remote Sensing, 11(17), 2046. https://doi.org/10.3390/rs11172046