Improving the Accuracy of Regional Ionospheric Mapping with Double-Difference Carrier Phase Measurement

Abstract
1. Introduction
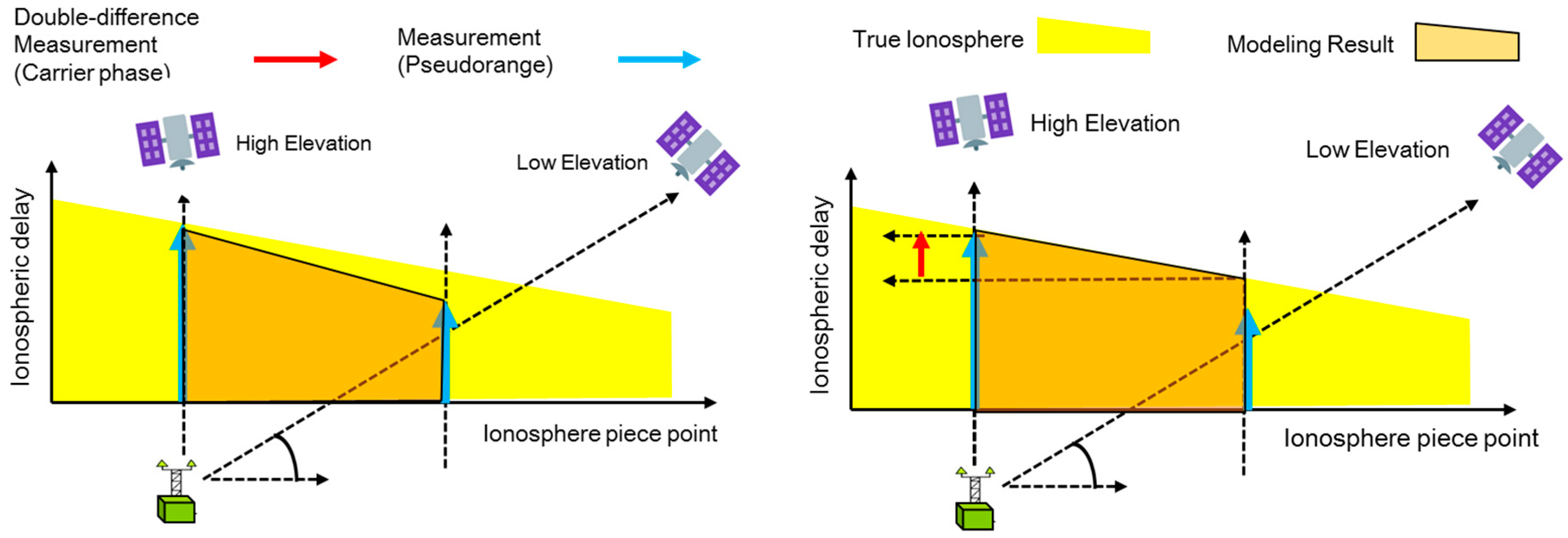
2. Benefits of the Double-Difference Carrier Phase for Ionospheric Modeling
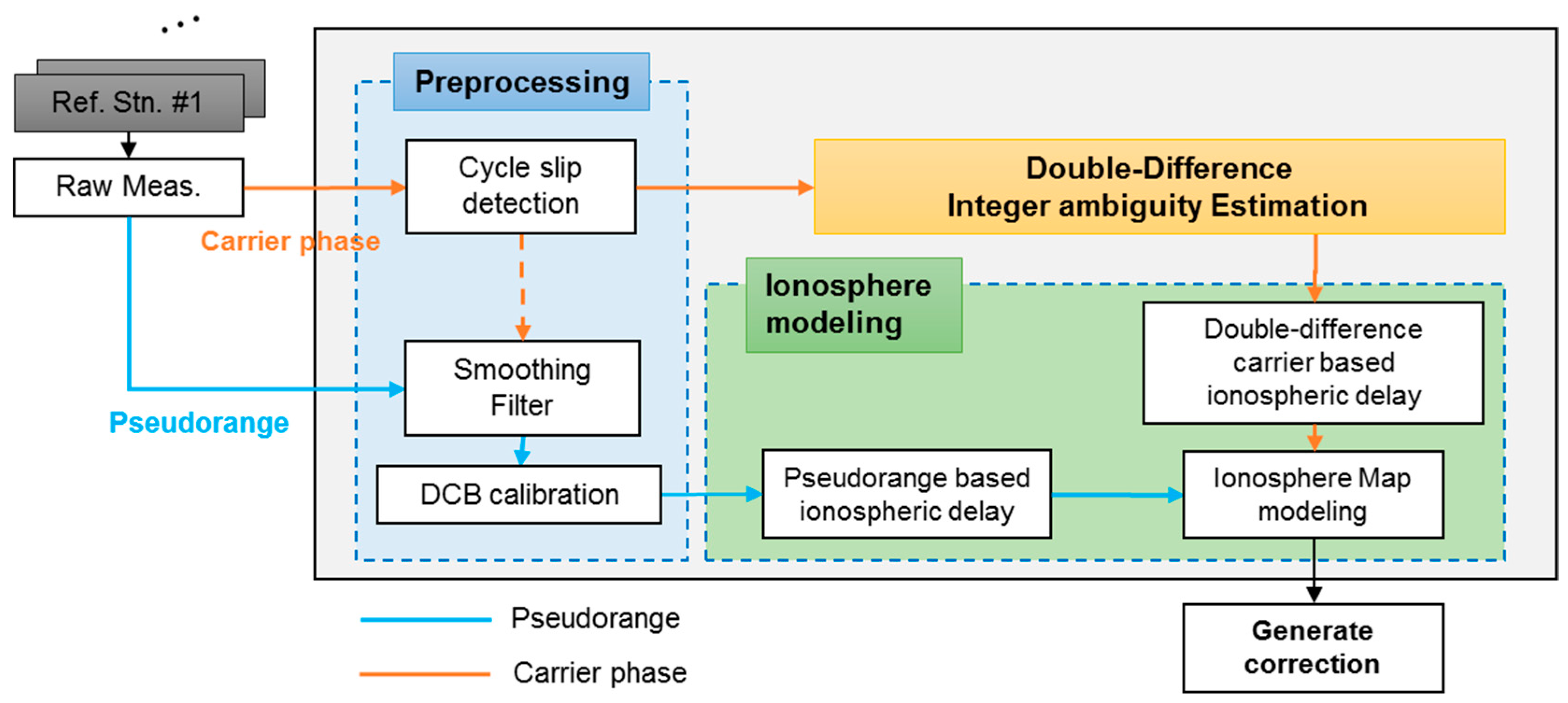
3. Ionosphere Modeling Algorithm
3.1. Measurement
3.2. Ionospheric Model
3.3. Observation Equation
4. Test Results
4.1. Simulation Test
4.2. Real Data Test
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Klobuchar, J.A. Design and characteristics of the GPS ionospheric time delay algorithm for single frequency users. In Proceedings of the Position Location and Navigation Symposium, Las Vegas, NV, USA, 4–7 November 1986; IEEE: New York, NY, USA, 1986; pp. 280–286. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Kee, C.; Parkinson, B.W.; Axelrad, P. Wide area differential GPS. Navigation 1991, 38, 123–145. [Google Scholar] [CrossRef]
- Odijk, D. Improving ambiguity resolution by applying ionosphere corrections from a permanent GPS array. Earth Planets Space 2000, 52, 675–680. [Google Scholar] [CrossRef]
- Al-Shaery, A.; Lim, S.; Rizos, C. Investigation of different interpolation models used in Network-RTK for the virtual reference station technique. J. Glob. Position. Syst. 2011, 10, 136–148. [Google Scholar] [CrossRef]
- Paziewski, J. Study on desirable ionospheric corrections accuracy for network-RTK positioning and its impact on time-to-fix and probability of successful single-epoch ambiguity resolution. Adv. Space Res. 2016, 57, 1098–1111. [Google Scholar] [CrossRef]
- Wielgosz, P.; Krankowski, A.; Sieradzki, R.; Grejner-Brzezinska, D. Application of Predictive Regional Ionosphere Model to Medium Range RTK Positioning. Acta Geophys. 2008, 56, 1147–1161. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, Q.; Huang, G.; Zhao, H. On ionosphere-delay processing methods for single-frequency precise-point positioning. Geod. Geodyn. 2011, 2, 71–76. [Google Scholar]
- Hoque, M.M.; Jakowski, N. Mitigation of ionospheric mapping function error. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; ION: Manassas, VA, USA, 2013; pp. 1848–1855. [Google Scholar]
- Skone, S.; Yousuf, R.; Coster, A. Performance evaluation of the wide area augmentation system for ionospheric storm events. Positioning 2004, 1, 251–258. [Google Scholar] [CrossRef]
- Townsend, B.; Fenton, P. A practical approach to the reduction of pseudorange multipath errors in a L1 GPS receiver. In Proceedings of the 7th International Technical Meeting of the Satellite Division of the Institute of Navigation, Salt Lake City, UT, USA, 20–23 September 1994; ION: Manassas, VA, USA, 1994. [Google Scholar]
- Simsky, A.; Sleewaegen, J.-M.; Nemry, P. Early performance results for new Galileo and GPS signals-in-space. In Proceedings of the ENC-GNSS, Manchester, UK, 7–10 May 2006; Royal Institute of Navigation: London, UK, 2006. [Google Scholar]
- Schaer, S.; Beutler, G.; Mervart, L.; Rothacher, M.; Wild, U. Global and regional ionosphere models using the GPS double difference phase observable. Available online: https://mediatum.ub.tum.de/doc/1365730/file.pdf (accessed on 7 August 2019).
- Han, D. A Study on Improving the Accuracy of SBAS Ionosphere Correction by Applying Double-Difference Carrier Phase Measurements. Ph.D. Thesis, Seoul National University, Seoul, Korea, 2018. [Google Scholar]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1982; New Mexico State University: Las Cruces, NM, USA, 1983; pp. 1213–1231. [Google Scholar]
- Kee, C.; Walter, T.; Enge, P.; Parkinson, B. Quality control algorithms on WAAS wide-area reference stations. Navigation 1997, 44, 53–62. [Google Scholar] [CrossRef]
- Cai, C.; Liu, Z.; Xia, P.; Dai, W. Cycle Slip Detection and Repair for Undifferenced GPS Observations under High Ionospheric Activity. GPS Solut. 2013, 17, 247–260. [Google Scholar] [CrossRef]
- Kim, D.; Song, J.; Yu, S.; Kee, C.; Heo, M. A New Algorithm for High-Integrity Detection and Compensation of Dual-Frequency Cycle Slip under Severe Ionospheric Storm Conditions. Sensors 2018, 18, 3654. [Google Scholar] [CrossRef]
- Park, B.; Lim, C.; Yun, Y.; Kim, E.; Kee, C. Optimal Divergence-Free Hatch Filter for GNSS Single-Frequency Measurement. Sensors 2017, 17, 448. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Zhang, B.; Yuan, Y.; Li, Z.; Wang, N. Multi-GNSS triple-frequency differential code bias (DCB) determination with precise point positioning (PPP). J. Geod. 2018, 93, 765–784. [Google Scholar] [CrossRef]
- Han, D.; Kim, D.; Kee, C. Improving performance of GPS satellite DCB estimation for regional GPS networks using long-term stability. GPS Solut. 2018, 22, 13. [Google Scholar] [CrossRef]
- Jin, R.; Jin, S.; Feng, G. M_DCB: Matlab code for estimating GNSS satellite and receiver differential code biases. GPS Solut. 2012, 16, 541–548. [Google Scholar] [CrossRef]
- Song, J. A Study on Improving Performance of Network RTK through Tropospheric Modeling for Land Vehicle Applications. Ph.D. Thesis, Seoul National University, Seoul, Korea, 2016. [Google Scholar]
- Gao, Y.; Petit, G.; Schaer, S. Session on Calibration and Future Receiver Developments. In Proceedings of the IGS Workshop 2008, Miami Beach, FL, USA, 2–6 June 2008. [Google Scholar]
- Walter, T.; Hansen, A.; Blanch, J.; Enge, P.; Mannucci, T.; Pi, X.; Sparks, L.; Iijima, B.; El-Arini, B.; Lejeune, R. Robust detection of ionospheric irregularities. Navigation 2001, 48, 89–100. [Google Scholar] [CrossRef]
- Chao, Y.-C. Real Time Implementation of the Wide Area Augmentation System for the Global Positioning System with an Emphasis on Ionospheric Modeling. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1997. [Google Scholar]
- Sparks, L.; Blanch, J.; Pandya, N. Estimating ionospheric delay using kriging: 1. methodology. Radio Sci. 2011, 46, 1–13. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, Z.Z. Precise ionosphere modeling using regional GPS network data. J. Glob. Position. Syst. 2002, 1, 18–24. [Google Scholar] [CrossRef]
- Moon, Y. Evaluation of 2Dimensional Ionosphere Models for National and Regional GPS Networks in Canada. Master’s Thesis, University of Calgary, Calgary, AB, Canada, 2004. [Google Scholar]
- Shallberg, K.; Shloss, P.; Altshuler, E.; Tahmazyan, L. WAAS measurement processing, reducing the effects of multipath. In Proceedings of the 14th International Technical Meeting of the Satellite Division of the Institute of Navigation, Salt Lake City, UT, USA, 11–14 September 2001; ION: Manassas, VA, USA, 2001. [Google Scholar]
- Shallberg, K.; Sheng, F. WAAS measurement processing; current design and potential improvements. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Lau, L.; Cross, P. Development and testing of a new ray-tracing approach to GNSS carrier-phase multipath modelling. J. Geod. 2007, 81, 713–732. [Google Scholar] [CrossRef]
- Feltens, J.; Schaer, S. IGS products for the ionosphere. In Proceedings of the 1998 IGS Analysis Center Workshop, Darmstadt, Germany, 9–11 February 1998; Available online: http://gauss.gge.unb.ca/IGS/final/ionopp98.pdf (accessed on 7 August 2019).
- Gurtner, W.; Estey, L. RINEX: The Receiver Independent Exchange Format Version 2.11. 2012. Available online: ftp://igs.org/pub/data/format/rinex211.txt (accessed on 27 June 2019).
- Jung, S.; Lee, J. Long-term ionospheric anomaly monitoring for ground based augmentation systems. Radio Sci. 2012, 47, 1–12. [Google Scholar] [CrossRef]
- Nie, Z.; Zhou, P.; Liu, F.; Wang, Z.; Gao, Y. Evaluation of Orbit, Clock and Ionospheric Corrections from Five Currently Available SBAS L1 Services: Methodology and Analysis. Remote Sens. 2019, 11, 411. [Google Scholar] [CrossRef]
- Blanch, J. Using Kriging to Bound Satellite Ranging Errors Due to the Ionosphere. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2003. [Google Scholar]
- Sakai, T.; Kitamura, M.; Aso, T.; Hoshino, K. Avoiding Improper Modeling in SBAS Ionospheric Correction with Shrunk Observations. In Proceedings of the 2018 International Technical Meeting of the Institute of Navigation, Reston, VA, USA, 29 January–1 February 2018; ION: Manassas, VA, USA, 2018. [Google Scholar]
- Datta-Barua, S. Ionospheric Threats to Space-Based Augmentation System Development. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2004), Long beach, CA, USA, 21–24 September 2004; ION: Manassas, VA, USA, 2004. [Google Scholar]
- Feng, Y.; Wang, J. GPS RTK Performance Characteristics and Analysis. J. Glob. Position. Syst. 2010, 7, 1–8. [Google Scholar] [CrossRef]
- DO-229D. WAAS MOPS (Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System Airborne Equipment); RTCA, Inc.: Washington, DC, USA, 2006. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| User | Algorithm 1 | Algorithm 2 | Algorithm 3 | Algorithm 4 (Proposed) |
|---|---|---|---|---|
| User 1 | 0.29 m | 0.35 m | 0.27 m | 0.15 m |
| User 2 | 0.30 m | 0.36 m | 0.22 m | 0.14 m |
| User 3 | 0.32 m | 0.36 m | 0.26 m | 0.15 m |
| User 4 | 0.24 m | 0.38 m | 0.18 m | 0.15 m |
| User 5 | 0.25 m | 0.38 m | 0.15 m | 0.15 m |
| User 6 | 0.28 m | 0.38 m | 0.22 m | 0.16 m |
| User 7 | 0.49 m | 0.48 m | 0.20 m | 0.15 m |
| User 8 | 0.49 m | 0.48 m | 0.23 m | 0.16 m |
| User 9 | 0.52 m | 0.48 m | 0.32 m | 0.19 m |
| Total | 0.37 m | 0.41 m | 0.23 m | 0.16 m |
| Station | Receiver | Antenna | Lat (deg) | Lon (deg) | Baseline (km) |
|---|---|---|---|---|---|
| Master | Trimble NETR9 | TRM59800.00 | 36.52221 | 127.30319 | - |
| Aux 1 | Trimble NETR9 | TRM59800.80 | 37.77092 | 128.86823 | 196.30 |
| Aux 2 | Trimble NETR9 | TRM59800.80 | 35.17309 | 128.04967 | 164.18 |
| Aux 3 | Trimble NETR9 | TRM59800.00 | 37.71938 | 126.39024 | 155.67 |
| Aux 4 | Trimble NETR9 | TRM59800.80 | 33.51392 | 126.52982 | 341.08 |
| User 1 | Trimble NETR9 | TRM59800.80 | 37.27551 | 127.05424 | - |
| User 2 | Trimble NETR9 | TRM59800.80 | 35.90631 | 128.80197 | - |
| User 3 | Trimble NETR9 | TRM59800.80 | 36.99197 | 129.41300 | - |
| User 4 | Trimble NETR9 | TRM55971.00 | 33.46780 | 126.90471 | - |
| User | Algorithm 1 | Algorithm 2 | Algorithm 3 | Algorithm 4 (Proposed) |
|---|---|---|---|---|
| User 1 | 0.39 m | 0.29 m | 0.19 m | 0.17 m |
| User 2 | 0.52 m | 0.56 m | 0.34 m | 0.28 m |
| User 3 | 0.51 m | 0.40 m | 0.30 m | 0.22 m |
| User 4 | 0.86 m | 1.00 m | 0.46 m | 0.30 m |
| User 5 | 0.39 m | 0.23 m | 0.21 m | 0.21 m |
| Users 1 and 5 | 0.39 m | 0.26 m | 0.20 m | 0.19 m |
| Users 2–4 | 0.65 m | 0.70 m | 0.37 m | 0.27 m |
| Total | 0.57 m | 0.58 m | 0.32 m | 0.24 m |
| User | Algorithm 1 | Algorithm 2 | Algorithm 3 | Algorithm 4 |
|---|---|---|---|---|
| User 1 | 0.39 m | 0.24 m | 0.16 m | 0.16 m |
| User 2 | 1.26 m | 1.23 m | 0.49 m | 0.38 m |
| User 3 | 0.95 m | 0.77 m | 0.39 m | 0.28 m |
| User 4 | 1.56 m | 1.57 m | 0.56 m | 0.42 m |
| User 5 | 0.56 m | 0.28 m | 0.22 m | 0.20 m |
| Users 1 and 5 | 0.48 m | 0.26 m | 0.19 m | 0.18 m |
| Users 2–4 | 1.28 m | 1.23 m | 0.49 m | 0.37 m |
| Total | 1.07 m | 1.01 m | 0.41 m | 0.31 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, D.; Kim, D.; Song, J.; Kee, C. Improving the Accuracy of Regional Ionospheric Mapping with Double-Difference Carrier Phase Measurement. Remote Sens. 2019, 11, 1849. https://doi.org/10.3390/rs11161849
Han D, Kim D, Song J, Kee C. Improving the Accuracy of Regional Ionospheric Mapping with Double-Difference Carrier Phase Measurement. Remote Sensing. 2019; 11(16):1849. https://doi.org/10.3390/rs11161849
Chicago/Turabian StyleHan, Deokhwa, Donguk Kim, Junesol Song, and Changdon Kee. 2019. "Improving the Accuracy of Regional Ionospheric Mapping with Double-Difference Carrier Phase Measurement" Remote Sensing 11, no. 16: 1849. https://doi.org/10.3390/rs11161849
APA StyleHan, D., Kim, D., Song, J., & Kee, C. (2019). Improving the Accuracy of Regional Ionospheric Mapping with Double-Difference Carrier Phase Measurement. Remote Sensing, 11(16), 1849. https://doi.org/10.3390/rs11161849