The ASI Integrated Sounder-SAR System Operating in the UHF-VHF Bands: First Results of the 2018 Helicopter-Borne Morocco Desert Campaign

 ,
,  ,
,  ,
,  , , , ,
, , , ,  ,
, 
 ,
,  ,
, 
Abstract
1. Introduction
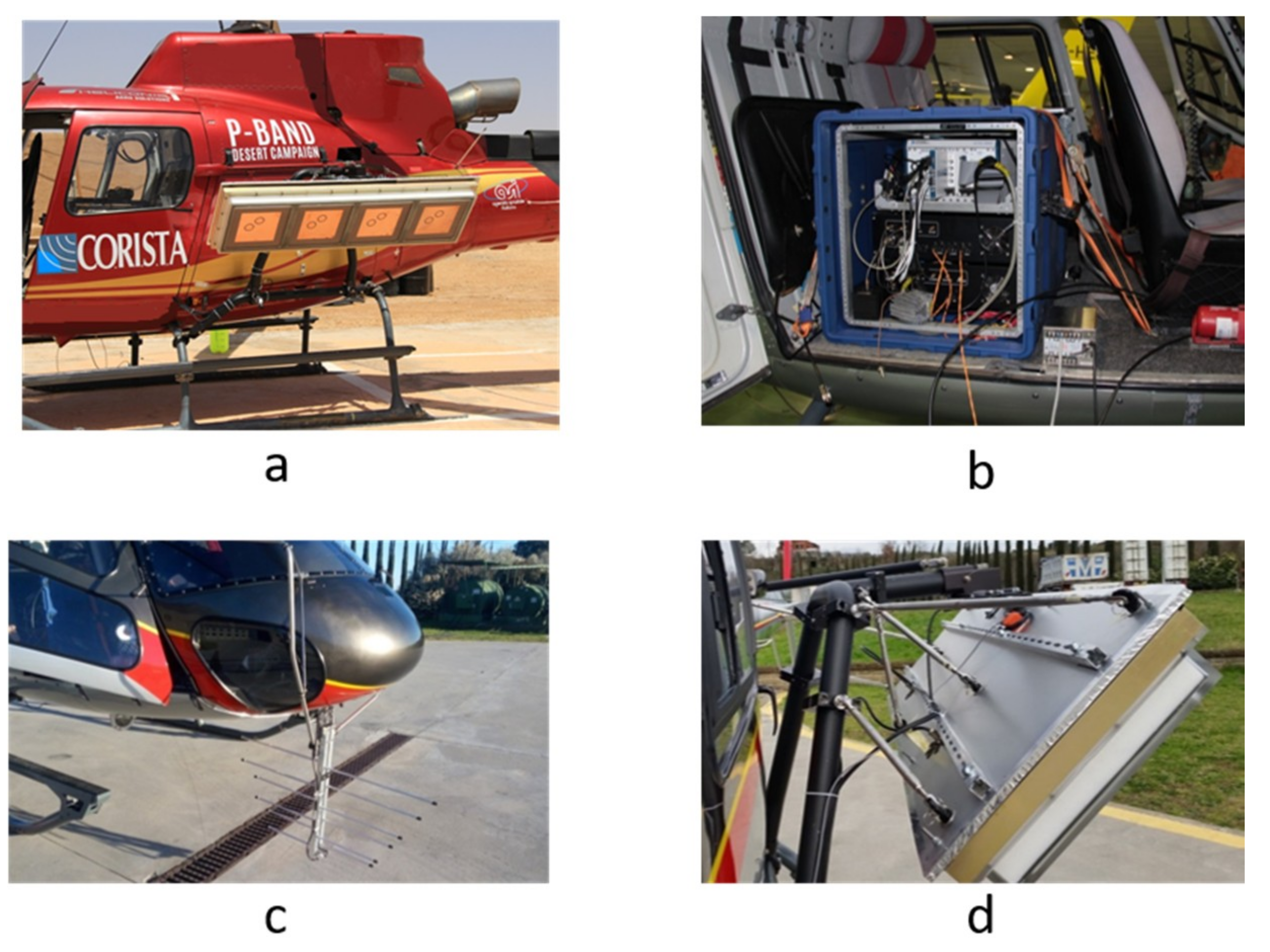
2. System Description
3. Campaign Description
4. Data Processing and Experimental Results: Sounder Mode
4.1. Data Processing
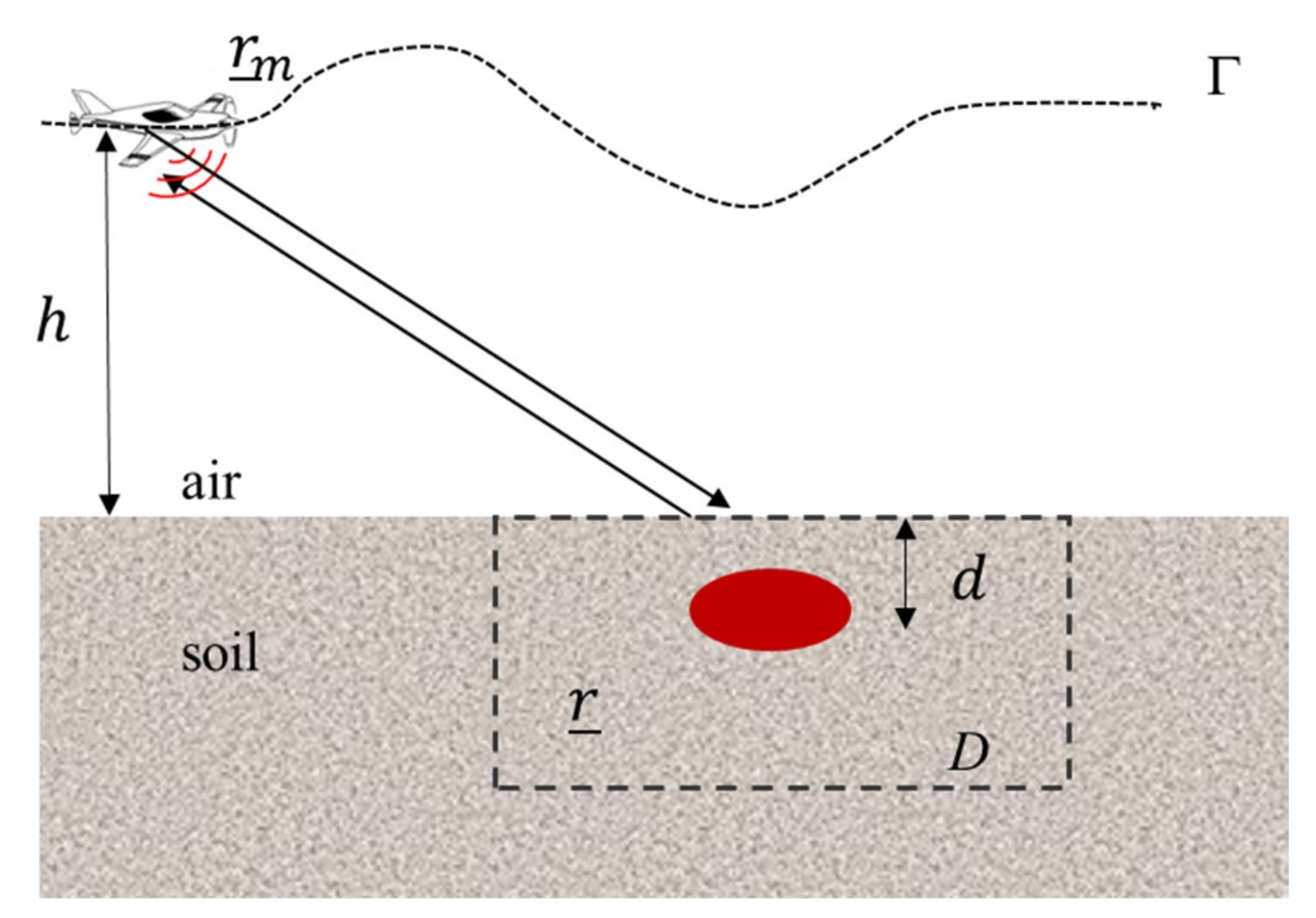
- the scene under investigation is invariant along the direction perpendicular to the plane defined by the normal to the ground and the (nominal) flight direction (2D geometry);
- the radar antenna is located in the far zone with respect to the investigated area. Moreover, the transmitting antenna is modeled as an electrical line source perpendicular to the survey plane;
- the propagation in the soil is negligible because the flight altitude is much greater than the depth of the target of interest. This approximation is acceptable when the goal is to locate shallow targets;
- the measurement configuration is multimonostatic/multifrequency so that, at each measurement point rm, the radar illuminates the scene at nadir and collects the field scattered by the targets at the same measurement point rm, within the frequency band of the transmitted signal;
- a linearized model of the electromagnetic scattering equations is exploited [67].
4.2. First Results
5. Data Processing and Experimental Results: SAR Mode
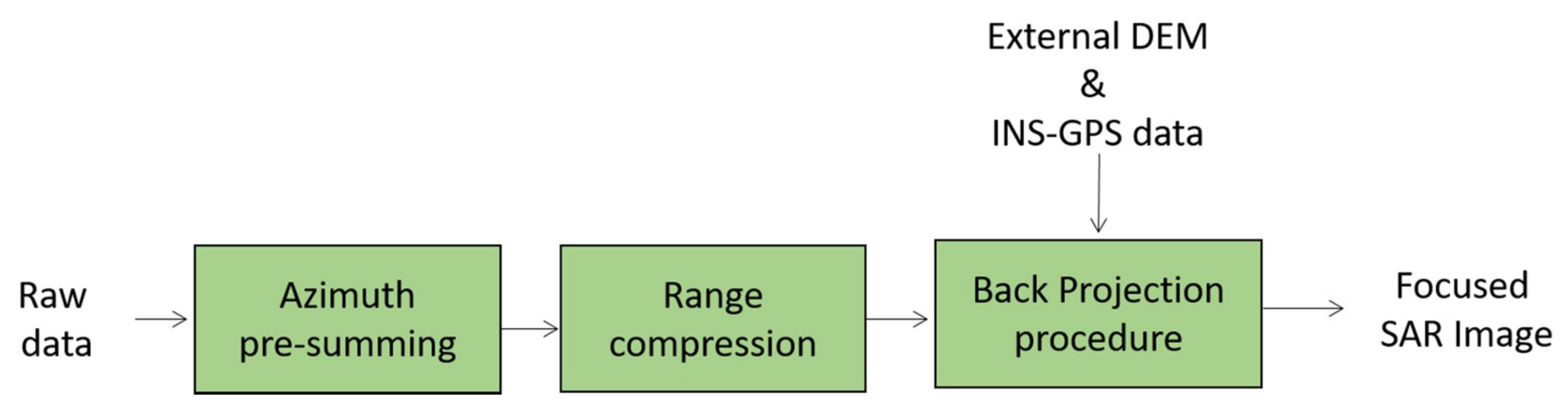
5.1. Data Processing
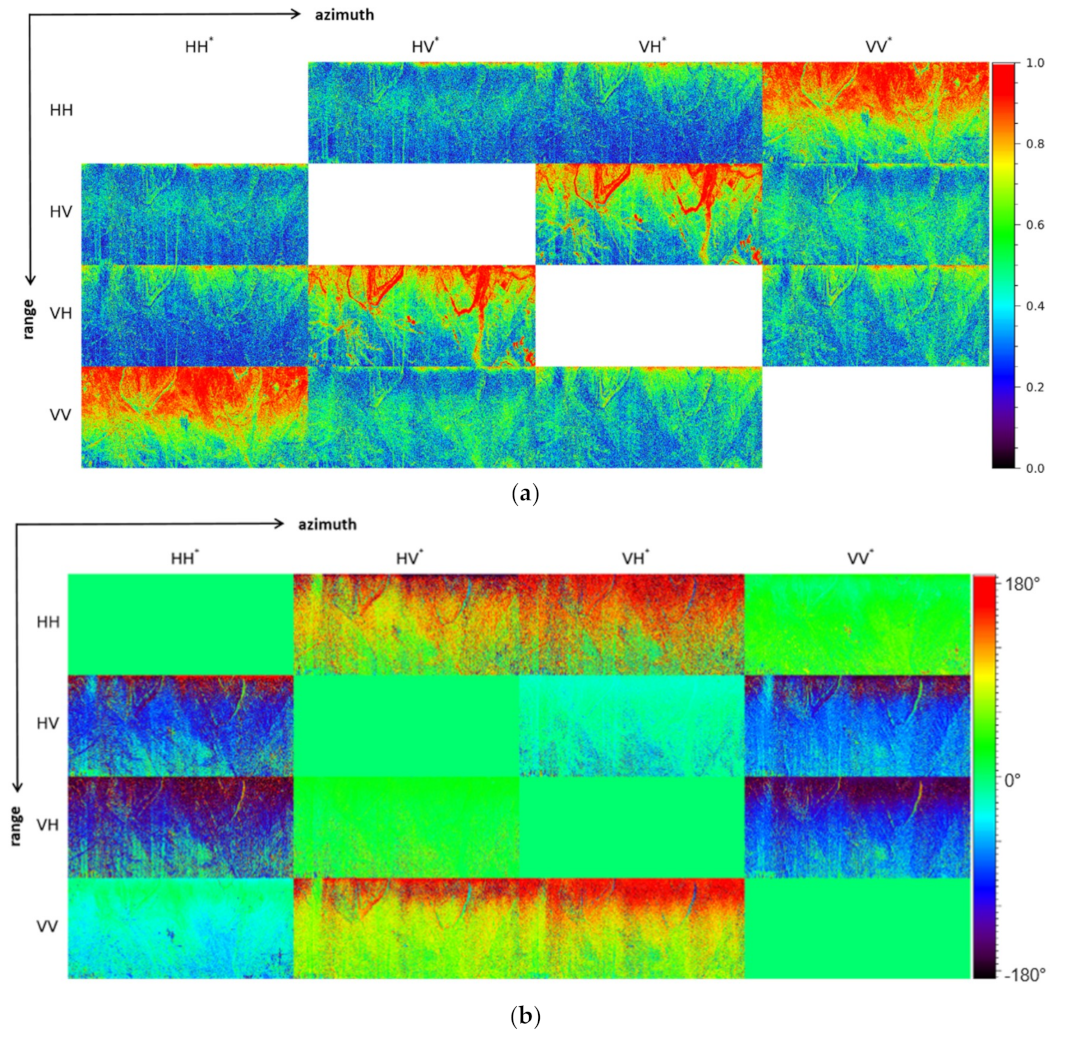
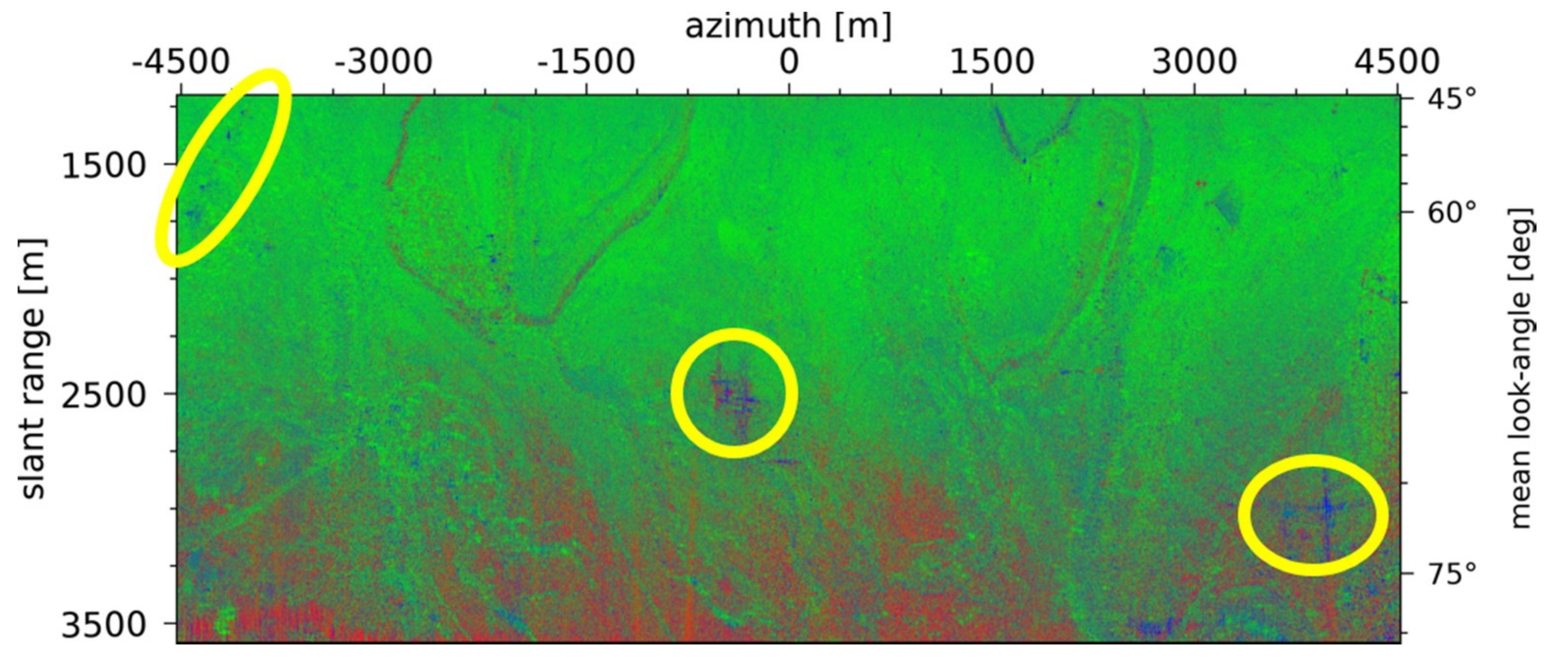
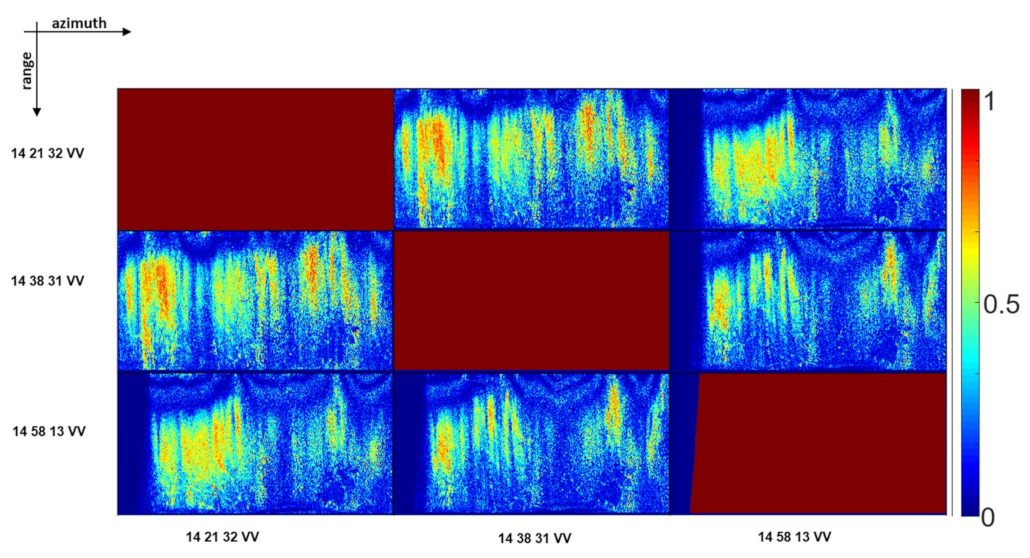
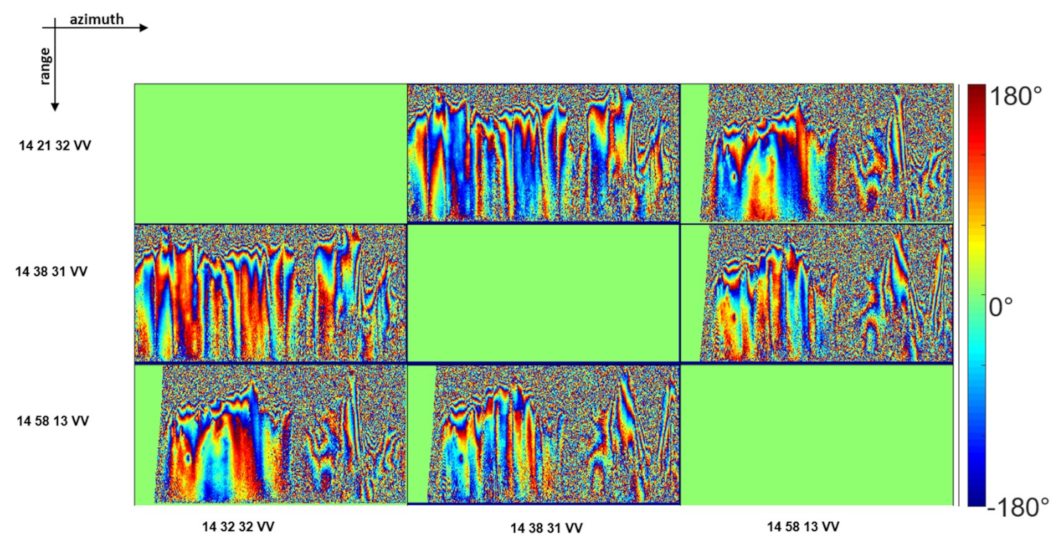
5.2. First Results
6. Conclusions and Further Developments
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tsang, L.; Kong, J.A.; Shin, R.T. Theory of Microwave Remote Sensing, 1st ed.; Wiley-Interscience: Hoboken, NJ, USA, 1985. [Google Scholar]
- Massonnet, D.; Briole, P.; Arnaud, A. Deflation of Mount Etna monitored by spaceborne radar interferometry. Nature 1995, 375, 567–570. [Google Scholar] [CrossRef]
- Lanari, R.; Berardino, P.; Bonano, M.; Casu, F.; Manconi, A.; Manunta, M.; Manzo, M.; Pepe, A.; Pepe, S.; Sansosti, E.; et al. Surface displacements associated with the L’Aquila 2009 Mw 6.3 earthquake (central Italy): New evidence from SBAS-DInSAR time series analysis. Geophys. Res. Lett. 2010, 37, L20309. [Google Scholar] [CrossRef]
- Lavecchia, G.; Castaldo, R.; de Nardis, R.; de Novellis, V.; Ferrarini, F.; Pepe, S.; Brozzetti, F.; Solaro, G.; Cirillo, D.; Bonano, M.; et al. Ground deformation and source geometry of the 24 August 2016 Amatrice earthquake (Central Italy) investigated through analytical and numerical modeling of DInSAR measurements and structural-geological data. Geophys. Res. Lett. 2016, 43, 12–389. [Google Scholar] [CrossRef]
- Kim, D.-J.; Hensley, S.; Yun, S.-H.; Neumann, M. Detection of Durable and Permanent Changes in Urban Areas Using Multitemporal Polarimetric UAVSAR Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 267–271. [Google Scholar] [CrossRef]
- Horn, R.; Nottensteiner, A.; Scheiber, R. F-SAR—DLR’s advanced airborne SAR system onboard DO228. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Baqué, R.; Bonin, G.; du Plessis, O.R. The airborne SAR-system: SETHI airborne microwave remote sensing imaging system. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Perna, S.; Esposito, C.; Amaral, T.; Berardino, P.; Jackson, G.; Moreira, J.; Pauciullo, A.; Vaz Junior, E.; Wimmer, C.; Lanari, R. The InSAeS4 airborne X-band interferometric SAR system: A first assesment on its imaging and topographic mapping capabilities. Remote Sens. 2016, 8, 40. [Google Scholar] [CrossRef]
- Aguasca, A.; Acevo-Herrera, R.; Broquetas, A.; Mallorqui, J.J.; Fabregas, X. ARBRES: Light-Weight CW/FM SAR Sensors for Small UAVs. Sensors 2013, 13, 3204–3216. [Google Scholar] [CrossRef] [PubMed]
- Daniels, D.J. Ground Penetrating Radar; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Tarchi, D.; Casagli, N.; Fanti, R.; Leva, D.D.; Luzi, G.; Pasuto, A.; Pieraccini, M.; Silvano, S. Landslide monitoring by using ground-based SAR interferometry: An example of application to the Tessina landslide in Italy. Eng. Geol. 2003, 68, 15–30. [Google Scholar] [CrossRef]
- Virelli, M.; Coletta, A.; Battagliere, M.L. ASI COSMO-SkyMed: Mission Overview and Data Exploitation. IEEE Geosci. Remote Sens. Mag. 2014, 2, 64–66. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A Satellite Formation for High-Resolution SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 Mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Seu, R.; Biccari, D.; Orosei, R.; Lorenzoni, L.V.; Phillips, R.J.; Marinangeli, L.; Picardi, G.; Masdea, A.; Zampolini, E. SHARAD: The MRO 2005 shallow radar. Plane. Space Sci. 2004, 52, 157–166. [Google Scholar] [CrossRef]
- Croci, R.; Seu, R.; Flamini, E.; Russo, E. The SHAllow RADar (SHARAD) onboard the NASA MRO mission. Proc. IEEE 2011, 99, 794–807. [Google Scholar] [CrossRef]
- Picardi, G.; Plaut, J.J.; Biccari, D.; Bombaci, O.; Calabrese, D.; Cartacci, M.; Cicchetti, A.; Clifford, S.M.; Edenhofer, P.; Farrell, W.M.; et al. Radar soundings of the subsurface of Mars. Science 2005, 310, 1925–1928. [Google Scholar] [CrossRef]
- Jordan, R.; Picardi, G.; Plaut, J.; Wheeler, K.; Kirchner, D.; Safaeinili, A.; Johnson, W.; Seu, R.; Calabrese, D.; Zampolini, E.; et al. The Mars express MARSIS sounder instrument. Plane. Space Sci. 2009, 57, 1975–1986. [Google Scholar] [CrossRef]
- Ono, T.; Kumamoto, A.; Nakagawa, H.; Yamaguchi, Y.; Oshigami, S.; Yamaji, A.; Kobayashi, T.; Kasahara, Y.; Oya, H. Lunar radar sounder observations of subsurface layers under the nearside maria of the Moon. Science 2009, 323, 909–912. [Google Scholar] [CrossRef]
- Cook, J.C. Proposed monocycle-pulse very-high-frequency radar for airborne ice and snow measurement. Trans. Am. Inst. Electr. Eng. Part I Commun. Electron. 1960, 79, 588–594. [Google Scholar]
- Bailey, J.; Evans, S.; Robin, G.D.Q. Radio echo sounding of polar ice sheets. Nature 1964, 204, 420–421. [Google Scholar] [CrossRef]
- Hodge, S.M.; Wright, D.; Bradley, J.; Jacobel, R.; Skou, N.; Vaughn, B. Determination of the surface and bed topography in central Greenland. J. Glaciol. 1990, 36, 17–30. [Google Scholar] [CrossRef]
- Gogineni, S.; Chuah, T.; Allen, C.; Jezek, K.; Moore, R.K. An improved coherent radar depth sounder. J. Glaciol. 1998, 44, 659–669. [Google Scholar] [CrossRef]
- Rodriguez-Morales, F.; Gogineni, S.; Leuschen, C.J.; Paden, J.D.; Li, J.; Lewis, C.C.; Panzer, B.; Alvestegui, D.G.-G.; Patel, A.; Byers, K.; et al. Advanced multifrequency radar instrumentation for polar research. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2824–2842. [Google Scholar] [CrossRef]
- Li, J.; Paden, J.; Leuschen, C.; Rodriguez-Morales, F.; Hale, R.D.; Arnold, E.J.; Crowe, R.; Gomez-Garcia, D.; Gogineni, P. High-altitude radar measurements of ice thickness over the Antarctic and Greenland ice sheets as a part of operation ice bridge. IEEE Trans. Geosci. Remote Sens. 2013, 50, 742–754. [Google Scholar] [CrossRef]
- Hélière, F.; Lin, C.; Corr, H.; Vaughan, D. Radio echo sounding of Pine Island Glacier, West Antarctica: Aperture synthesis processing and analysis of feasibility from space. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2573–2582. [Google Scholar] [CrossRef]
- Kristensen, D.J.; Krozer, S.S.; Hernández, V.; Vidkjær, C.C.; Kusk, J.; Christensen, E.L. ESA’s polarimetric airborne radar ice sounder (POLARIS): Design and first results. IET Radar Sonar Navig. 2010, 4, 488–496. [Google Scholar]
- Heggy, E.; Rosen, P.A.; Beatty, R.; Freeman, T.; Gim, Y. Orbiting Arid Subsurface and Ice Sheet Sounder (OASIS): Exploring desert aquifers and polar ice sheets and their role in current and paleo-climate evolution. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2013. [Google Scholar]
- Bradford, J.H.; Dickins, D.F.; Brandvik, P.J. Assessing the potential to detect oil spills in and under snow using airborne ground-penetrating radar. Geophysics 2010, 75, G1–G12. [Google Scholar] [CrossRef]
- Rignot, E.; Mouginot, J.; Larsen, C.F.; Gim, Y.; Kirchner, D. Low-frequency radar sounding of temperate ice masses in Southern Alaska. Geophys. Res. Lett. 2013, 40, 5399–5405. [Google Scholar] [CrossRef]
- Mouginot, J.; Rignot, E.; Gim, Y.; Kirchner, D.; Le Meur, F. Low-frequency radar sounding of ice in East Antarctica and southern Greenland. Ann. Glaciol. 2014, 55, 138–146. [Google Scholar] [CrossRef]
- Davis, M.E. Foliage Penetration Radar—Detection and Characterization of Objects under Trees; SciTech Publishing: Raleigh, NC, USA, 2011. [Google Scholar]
- Moussally, G.; Breiter, K.; Rolig, J. Wide-area landmine survey and detection system. In Proceedings of the 10th International Conference on Ground Penetrating Radar, Delft, The Netherlands, 21–24 June 2004. [Google Scholar]
- Le Toan, T.; Quegan, S.; Davidson, M.W.J.; Balzter, H.; Paillou, P.; Papathanassiou, K.; Plummer, S.; Rocca, F.; Saatchi, S.; Shugart, H.; et al. The BIOMASS mission: Mapping global forest biomass to better understand the terrestrial carbon cycle. Remote Sens. Environ. 2011, 115, 2850–2860. [Google Scholar] [CrossRef]
- Neumann, M.; Saatchi, S.S.; Ulander, L.; Franson, J. Assessing Performance of L- and P-Band Polarimetric Interferometric SAR Data in Estimating Boreal Forest Above-Ground Biomass. IEEE Trans. Geosci. Remote Sens. 2012, 50, 714–726. [Google Scholar] [CrossRef]
- Hoekman, D.H.; Quiriones, M.J. Land cover type and biomass classification using AirSAR data for evaluation of monitoring scenarios in the Colombian Amazon. IEEE Trans. Geosci. Remote Sens. 2000, 38, 685–696. [Google Scholar] [CrossRef]
- Garestier, F.; Dubois-Fernandez, P.; Guyon, D.; Le Toan, T. Forest Biophysical Parameter Estimation Using L and P band Polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3379–3388. [Google Scholar] [CrossRef]
- Hajnsek, I.; Kugler, F.; Lee, S.K.; Papathanassiou, K.P. Tropical-Forest-Parameter Estimation by Means of Pol-InSAR: The INDREX-II Campaign. IEEE Trans. Geosci. Remote Sens. 2009, 47, 481–493. [Google Scholar] [CrossRef]
- Rott, H.; Davis, R.E. Multifrequency and polarimetric SAR observations on Alpine glaciers. Ann. Glaciol. 1993, 17, 98–104. [Google Scholar] [CrossRef]
- Sharma, J.J.; Hajnsek, I.; Papathanassiou, K.P.; Moireira, A. Polarimetric Decomposition Over Glacier Ice Using Long-Wavelength Airborne PolSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 519–535. [Google Scholar] [CrossRef]
- Tebaldini, S.; Nagler, T.; Rott, H.; Heilig, H. Imaging the Internal Structure of an Alpine Glacier via L-Band Airborne SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7197–8009. [Google Scholar] [CrossRef]
- Banda, F.; Dall, J.; Tebaldini, S. Single and Multipolarimetric P-Band SAR Tomography of Subsurface Ice Structure. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2832–2845. [Google Scholar] [CrossRef]
- Silva, W.F.; Rudorff, B.F.T.; Formaggio, A.R.; Paradella, W.R.; Mura, J.C. Discrimination of agricultural crops in a tropical semi-arid region of Brazil based on L-band polarimetric airborne SAR data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 458–463. [Google Scholar] [CrossRef]
- Lee, J.S.; Grunes, M.R.; Pottier, E.; Ferro-Famil, L. Unsupervised terrain classification preserving polarimetric scattering characteristics. IEEE Trans. Geosci. Remote Sens. 2004, 42, 722–731. [Google Scholar]
- Alpers, W.; Holt, B.; Zeng, K. Oil spill detection by imaging radars: Challenges and pitfalls. Remote Sens. Environ. 2007, 201, 133–147. [Google Scholar] [CrossRef]
- Rombach, M.; Fernandes, A.C.; Luebeck, D.; Moreira, J. Newest technology of mapping by using airborne interferometric synthetic aperture radar systems. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Papa, C.; Alberti, G.; Salzillo, G.; Palmese, G.; Califano, D.; Ciofaniello, L.; Daniele, M.; Facchinetti, C.; Longo, F.; Formaro, R.; et al. Design and Validation of a Multimode Multifrequency VHF/UHF Airborne Radar. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1260–1264. [Google Scholar] [CrossRef]
- Rosa, R.A.S.; Fernandes, D.; Barreto, T.L.M.; Wimmer, C.; Nogueira, J.B. Deforestation detection in Amazon rainforest with multitemporal X-band and p-band sar images using cross-coherences and superpixels. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Available online: https://www.geomatics.metasensing.com/airborne-sar (accessed on 20 June 2019).
- Wheeler, K.; Hensley, S. The GeoSAR airborne mapping system. In Proceedings of the Record of the IEEE 2000 International Radar Conference, Alexandria, VA, USA, 12 May 2000. [Google Scholar]
- Walker, B.; Sander, G.; Thompson, M.; Burns, B.; Fellerhoff, R.; Dubbert, D. A High-Resolution, Four-Band SAR Testbed with Real-Time Image Formation. In Proceedings of the International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 31–31 May 1996. [Google Scholar]
- Dubois-Fernandez, P.; du Plessis, O.R.; le Coz, D.; Dupas, J.; Vaizan, B.; Dupuis, X.; Cantalloube, H.; Coulombeix, C.; Titin-Schnaider, C.; Dreuillet, P.; et al. The ONERA RAMSES SAR system. In Proceedings of the International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002. [Google Scholar]
- Baqué, R.; Bonin, G.; du Plessis, O.R. The airborne SAR-system: SETHI airborne microwave remote sensing imaging system. In Proceedings of the International Radar Conference “Surveillance for a Safer World”, Bordeaux, France, 12–16 October 2009. [Google Scholar]
- Imhoff, M.L.; Johnson, P.; Holford, W.; Hyer, J.; May, L.; Lawrence, W.; Harcombe, P. BioSARTM: An inexpensive airborne VHF multiband SAR system for vegetation biomass measurement. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1458–1462. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Blom, M.; Flood, B.; Follo, P.; Frolind, P.-O.; Gustavsson, A.; Jonsson, T.; Larsson, B.; Murdin, D.; Pettersson, M.; et al. Development of the ultra-wideband LORA SAR operating in the VHF/UHF-band. In Proceedings of the International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Zaugg, E.; Edwards, M.; Long, D.; Stringham, C. Developments in compact high-performance synthetic aperture radar systems for use on small Unmanned Aircraft. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011. [Google Scholar]
- Dzenkevich, A.V.; Vostrov, E.A.; Mel’nikov, L.J.; Volkov, V.G.; Plyuschev, V.A.; Manakov, V.J. IMARC-multifrequency multipolarization airborne SAR system. In Proceedings of the Radar 97, Edinburgh, UK, 14–16 October 1997. [Google Scholar]
- Pinheiro, M.; Reigber, A.; Scheiber, R.; Prats-Iraola, P.; Moreira, A. Generation of highly accurate DEMs over flat areas by means of dual-frequency and dual-baseline airborne SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4361–4390. [Google Scholar] [CrossRef]
- Eisenburger, D.; Krellmann, Y.; Lentz, H.; Triltzsch, G. Stepped-frequency radar system in gating mode: An experiment as a new helicopter-borne GPR system for geological applications. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar]
- Richards, M.A.; Scheer, J.A.; Holm, W.A. Principles of Modern Radar: Basic Principles; SciTech Publishing: Raleigh, NC, USA, 2010. [Google Scholar]
- IEEE Standard Definitions of Terms for Antennas; IEEE Std 145-1983; The Institute of Electrical and Electronics Engineers: New York, NY, USA, 1983.
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Franceschetti, G.; Lanari, R. Synthetic Aperture Radar Processing; CRC PRESS: New York, NY, USA, 1999. [Google Scholar]
- Costanzo, S.; Di Massa, G.; Costanzo, A.; Borgia, A.; Papa, C.; Alberti, G.; Salzillo, G.; Palmese, G.; Califano, D.; Ciofanello, L.; et al. Multimode/Multifrequency Low Frequency Airborne Radar Design. J. Electr. Comput. Eng. 2013, 2013, 12. [Google Scholar] [CrossRef]
- Richards, M.A. Fundamentals of Radar Signal Processing; Tata McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Gennarelli, G.; Ludeno, G.; Catapano, I.; Soldovieri, F.; Alberti, G.; Califano, D.; Ciofaniello, L.; Palmese, G.; Papa, C.; Pica, G.; et al. An improved airborne VHF radar sounder for ice and desert exploration. In Proceedings of the 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018. [Google Scholar]
- Chew, W.C. Waves and Fields in Inhomogeneous Media, 2nd ed.; IEEE: New York, NY, USA, 1995. [Google Scholar]
- Bertero, M.; Boccacci, P. Introduction to Inverse Problems in Imaging; CRC PRESS: New York, NY, USA, 1998. [Google Scholar]
- Persico, R.; Ludeno, G.; Soldovieri, F.; De Coster, A.; Lambot, S. Two-dimensional linear inversion of GPR data with a shifting zoom along observation line. Remote Sens. 2017, 9, 10. [Google Scholar] [CrossRef]
- Gennarelli, G.; Catapano, I.; Soldovieri, F. Reconstruction capabilities of down-looking airborne GPRs: The single frequency case. IEEE Trans. Comput. Imaging 2017, 3, 917–927. [Google Scholar] [CrossRef]
- Persico, R. Introduction to Ground Penetrating Radar: Inverse Scattering and Data Processing; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Moreira, A.; Huang, Y. Airborne SAR Processing of Highly Squinted Data Using a Chirp Scaling Approach with Integrated Motion Compensation. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1029–1040. [Google Scholar] [CrossRef]
- Fornaro, G. Trajectory Deviations in Airborne SAR: Analysis and Compensation. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 997–1009. [Google Scholar] [CrossRef]
- Cafforio, C.; Prati, C.; Rocca, F. SAR data focusing using seismic migration techniques. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 194–207. [Google Scholar] [CrossRef]
- Fornaro, G.; Franceschetti, G.; Perna, S. On Center-Beam Approximation in SAR Motion Compensation. IEEE Geosci. Remote Sens. Lett. 2006, 3, 276–280. [Google Scholar] [CrossRef]
- Fornaro, G.; Franceschetti, G.; Perna, S. Motion Compensation Errors: Effects on the Accuracy of Airborne SAR Images. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1338–1352. [Google Scholar] [CrossRef]
- Soumekh, M. Synthetic Aperture Radar Signal Processing with MATLAB Algorithms; Wiley: Hoboken, NJ, USA, 1999. [Google Scholar]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: New York, NY, USA, 2009. [Google Scholar]
- Van Zyl, J.J. Unsupervised classification of scattering behavior using radar polarimetry data. IEEE Trans. Geosci. Remote Sens. 1989, 27, 36–45. [Google Scholar] [CrossRef]
- Iodice, A.; Natale, A.; Riccio, D. Polarimetric Two-Scale Model for Soil Moisture Retrieval via Dual-Pol HH-VV SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1163–1171. [Google Scholar] [CrossRef]
- D’Alessandro, M.M.; Tebaldini, S. Digital Terrain Model Retrieval in Tropical Forests Through P-Band SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2019, 1–8. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Sounder | SAR-Low | SAR-High |
|---|---|---|---|
| Carrier frequency | 165 MHz | 450 MHz | 860 MHz |
| Bandwidth | 40 MHz | 40 MHz | 80 MHz |
| Frequency steps | 1 | 1 | 2–3 |
| PRF | 500 Hz | 1000 Hz | 2000–3000 Hz |
| Pulse width | 2 µs | 2 µs | 2 µs |
| Mode | Pulsed | Pulsed | Pulsed |
| Antenna type | Log Periodic | array of microstrip antennas | array of microstrip antennas |
| Antenna gain | 7 dBi * | 11 dBi * | 17 dBi * |
| Antenna dimension | 8 × 58 × 107 cm | 10 × 45 × 165 cm | 10 × 45 × 165 cm |
| Antenna weight | 2 Kg | 15 Kg | 15 Kg |
| Nominal elevation pointing | Nadir | 45° | 45° |
| Nominal azimuth pointing | Nadir | 0° | 0° |
| Range aperture | 68° | 75° | 37° |
| Azimuth aperture | 50° | 20° | 10° |
| Range resolution | 3.8 m (free sp.) | 3.8 m | 1.9 m |
| Azimuth resolution | 1 m | 1 m | 1 m |
| ADC Sampling frequency | 200 MHz | ||
| Peak power | 200 W | ||
| Power consumption | 500 W | ||
| Rack Weight | 30 Kg | ||
| Rack Dimension | 50 × 50 × 65 cm | ||
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Azimuth spacing (SLC) | 0.64 m | Range spacing (SLC) | 1.5 m |
| Azimuth resolution (SLC) | 1 m | Range resolution (SLC) | 5 m |
| Azimuth spacing (MLC) | 0.64 m | Range spacing (MLC) | 1.5 m |
| Azimuth resolution (MLC) | 7.5 m | Range resolution (MLC) | 12.8 m |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Azimuth spacing (SLC) | 0.7 m | Ground range spacing (SLC) | 5 m |
| Azimuth resolution (SLC) | 1 m | Ground range resolution (SLC) | 6.25 m |
| Azimuth spacing (MLC) | 0.7 m | Ground range spacing (MLC) | 5 m |
| Azimuth resolution (MLC) | 7 m | Ground range resolution (MLC) | 6.25 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perna, S.; Alberti, G.; Berardino, P.; Bruzzone, L.; Califano, D.; Catapano, I.; Ciofaniello, L.; Donini, E.; Esposito, C.; Facchinetti, C.; et al. The ASI Integrated Sounder-SAR System Operating in the UHF-VHF Bands: First Results of the 2018 Helicopter-Borne Morocco Desert Campaign. Remote Sens. 2019, 11, 1845. https://doi.org/10.3390/rs11161845
Perna S, Alberti G, Berardino P, Bruzzone L, Califano D, Catapano I, Ciofaniello L, Donini E, Esposito C, Facchinetti C, et al. The ASI Integrated Sounder-SAR System Operating in the UHF-VHF Bands: First Results of the 2018 Helicopter-Borne Morocco Desert Campaign. Remote Sensing. 2019; 11(16):1845. https://doi.org/10.3390/rs11161845
Chicago/Turabian StylePerna, Stefano, Giovanni Alberti, Paolo Berardino, Lorenzo Bruzzone, Dario Califano, Ilaria Catapano, Luca Ciofaniello, Elena Donini, Carmen Esposito, Claudia Facchinetti, and et al. 2019. "The ASI Integrated Sounder-SAR System Operating in the UHF-VHF Bands: First Results of the 2018 Helicopter-Borne Morocco Desert Campaign" Remote Sensing 11, no. 16: 1845. https://doi.org/10.3390/rs11161845
APA StylePerna, S., Alberti, G., Berardino, P., Bruzzone, L., Califano, D., Catapano, I., Ciofaniello, L., Donini, E., Esposito, C., Facchinetti, C., Formaro, R., Gennarelli, G., Gerekos, C., Lanari, R., Longo, F., Ludeno, G., Mariotti d’Alessandro, M., Natale, A., Noviello, C., ... Thakur, S. (2019). The ASI Integrated Sounder-SAR System Operating in the UHF-VHF Bands: First Results of the 2018 Helicopter-Borne Morocco Desert Campaign. Remote Sensing, 11(16), 1845. https://doi.org/10.3390/rs11161845