Leveraging Commercial High-Resolution Multispectral Satellite and Multibeam Sonar Data to Estimate Bathymetry: The Case Study of the Caribbean Sea

 , ,
, ,  ,
,  and
and 
Abstract
1. Introduction
2. Materials and Methods
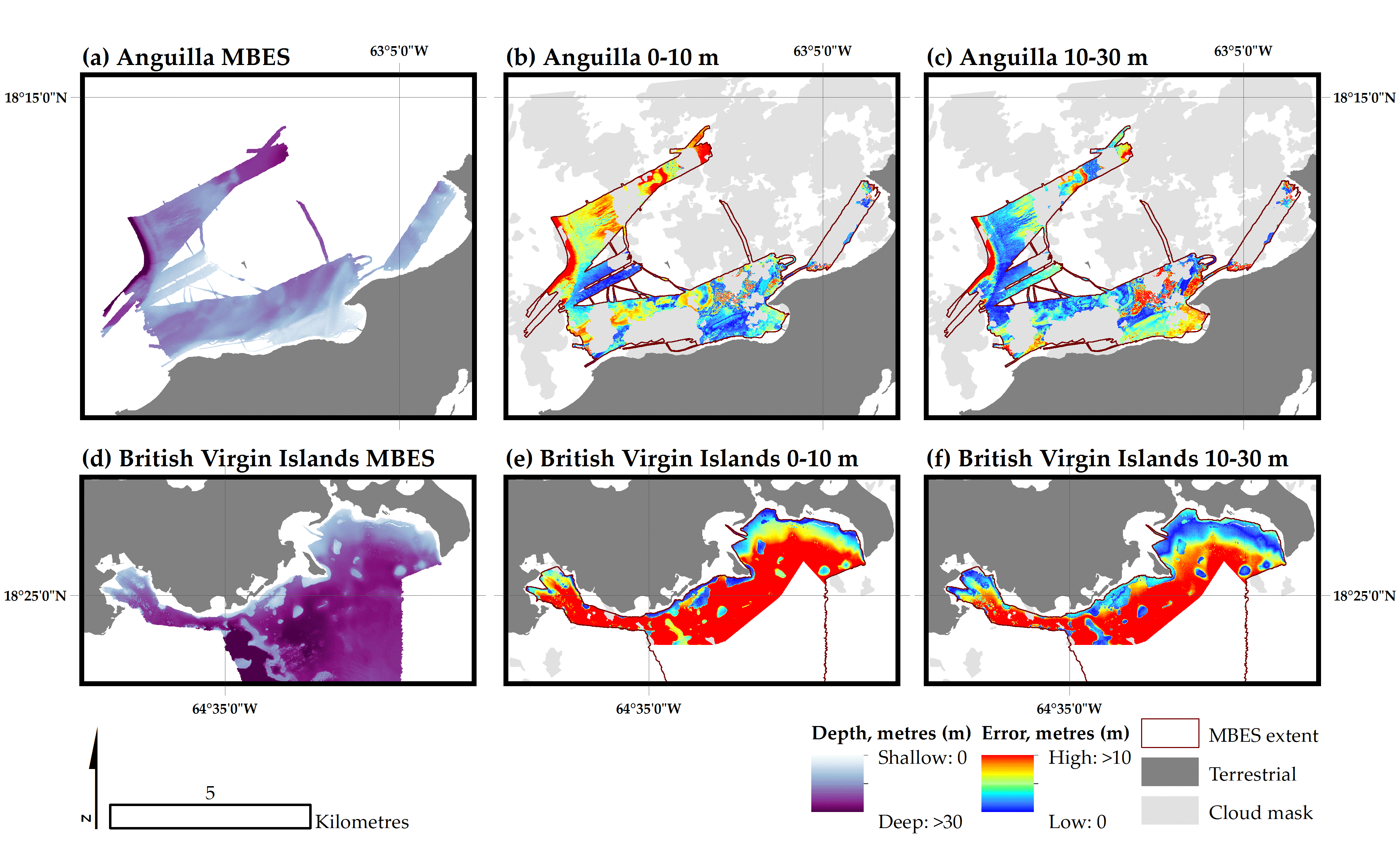
2.1. Study Sites
2.2. In Situ and Satellite Data
2.2.1. Multibeam Echosounder Surveys
2.2.2. Pleiades Imagery
2.3. Satellite Data Preprocessing
- The cloud mask data that were supplied with the raw Pleiades imagery were not accurate or precise enough for use. All clouds over marine environments were manually delineated and masked in QGIS 3.4.
- The Pleiades data lacks the shortwave-infrared of Sentinel-2 used within the classification and regression tree (CART) classifier. A CART classifier using the Pleiades imagery was considered, but did not reflect the existing boundaries used by the island GIS departments. To ensure interoperability with existing departmental data, all terrestrial environments were masked using OpenStreetMap boundary data in QGIS 3.4.
- The modified dark pixel subtraction (DPS) method [28] was implemented in QGIS 3.4.
- The temporal image composition [29] was outside the scope of this study and was not performed.
- The sun-glint correction algorithm [30] was performed on the single scene Pleiades images, within QGIS 3.4.
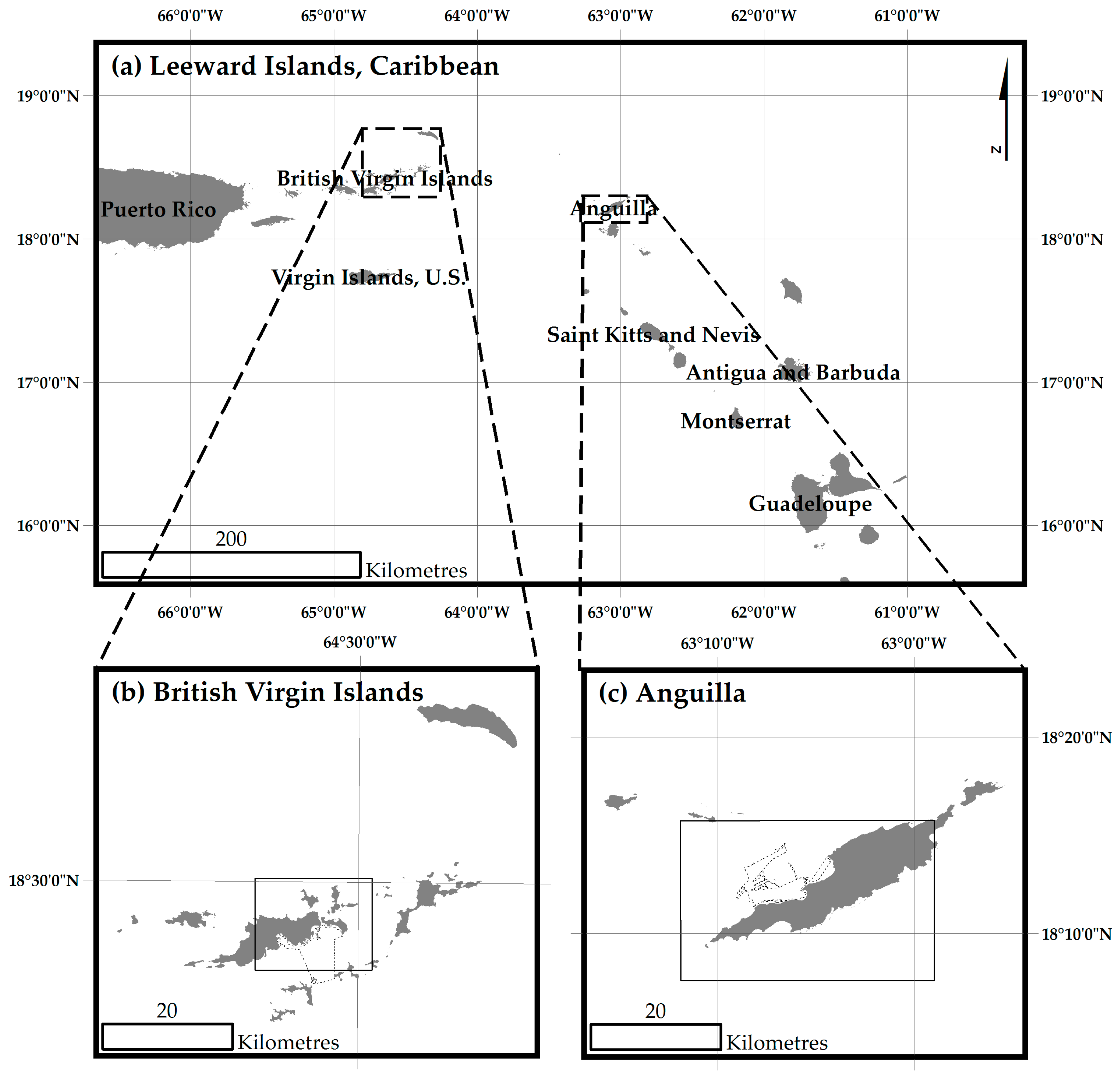
- There was no deviation from how the PIF were extracted, modelled or applied [31], except for the vegetation types used to represent dark features. In this study, shallow sand was used in all sites as bright features. Thalassia testudinum (turtle grass) and Syringodium filiforme (manatee grass) were used as dark features for the Anguilla site and BVI site respectively. The location used to extract the bright and dark featured are displayed in Figure 2.
- The 3 × 3 low pass filter was applied in QGIS 3.4.
2.4. Empirical Satellite-Derived Bathymetries (SDB)
2.5. Accuracy and Error
3. Results
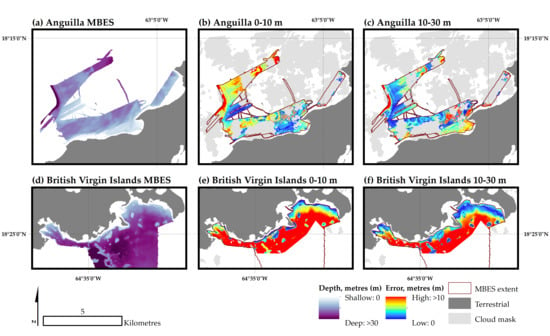
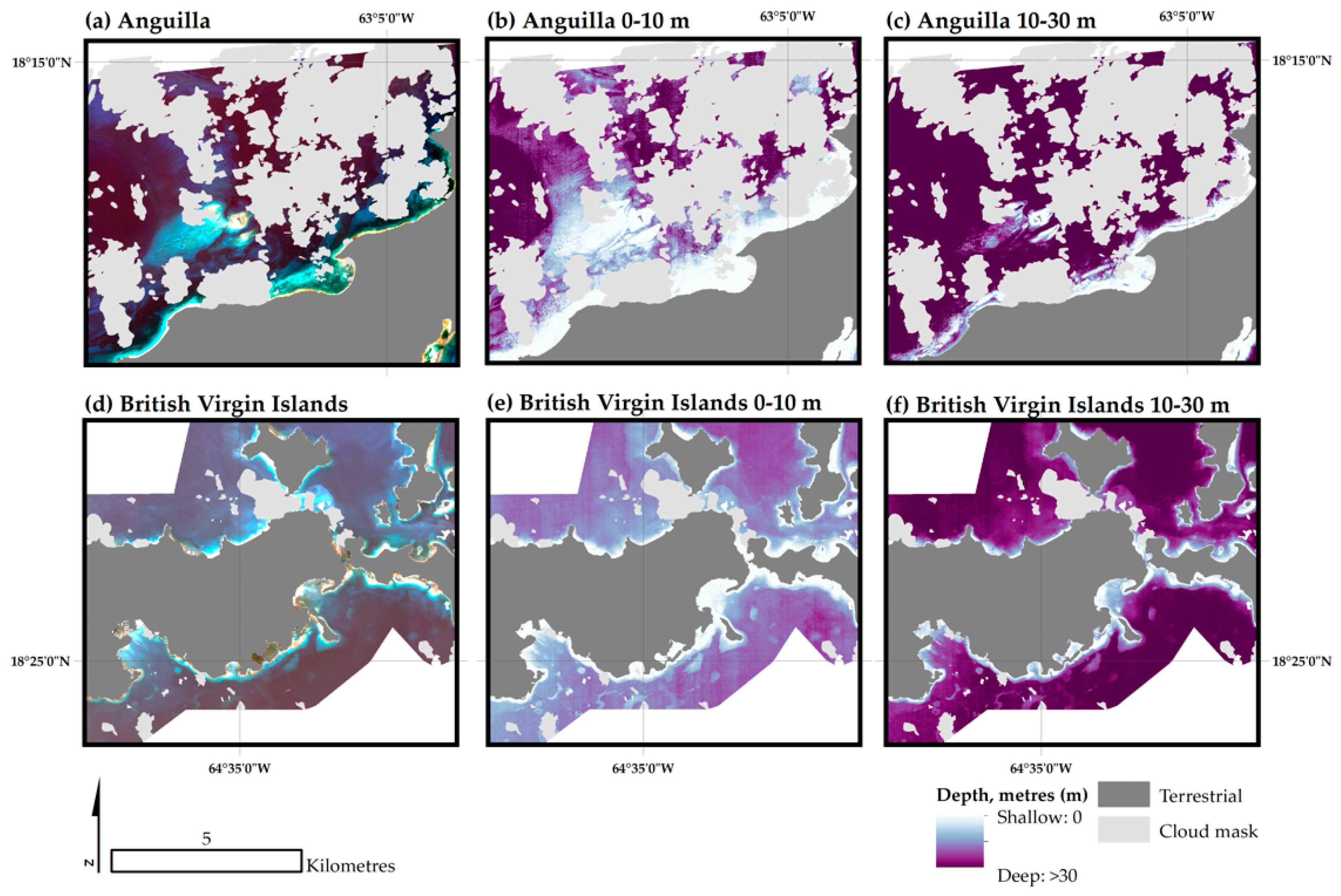
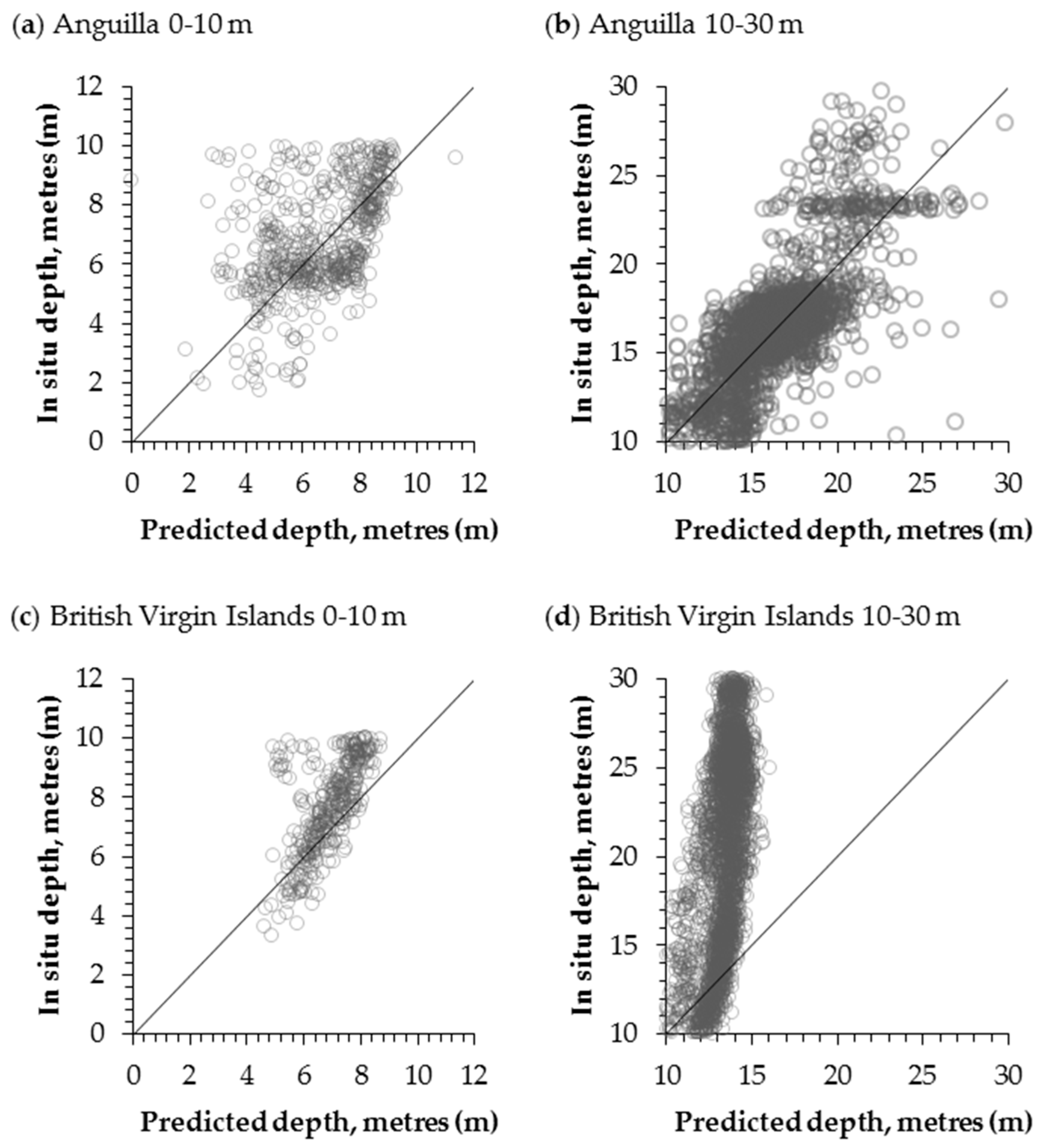
3.1. SDB Estimations and Accuracies
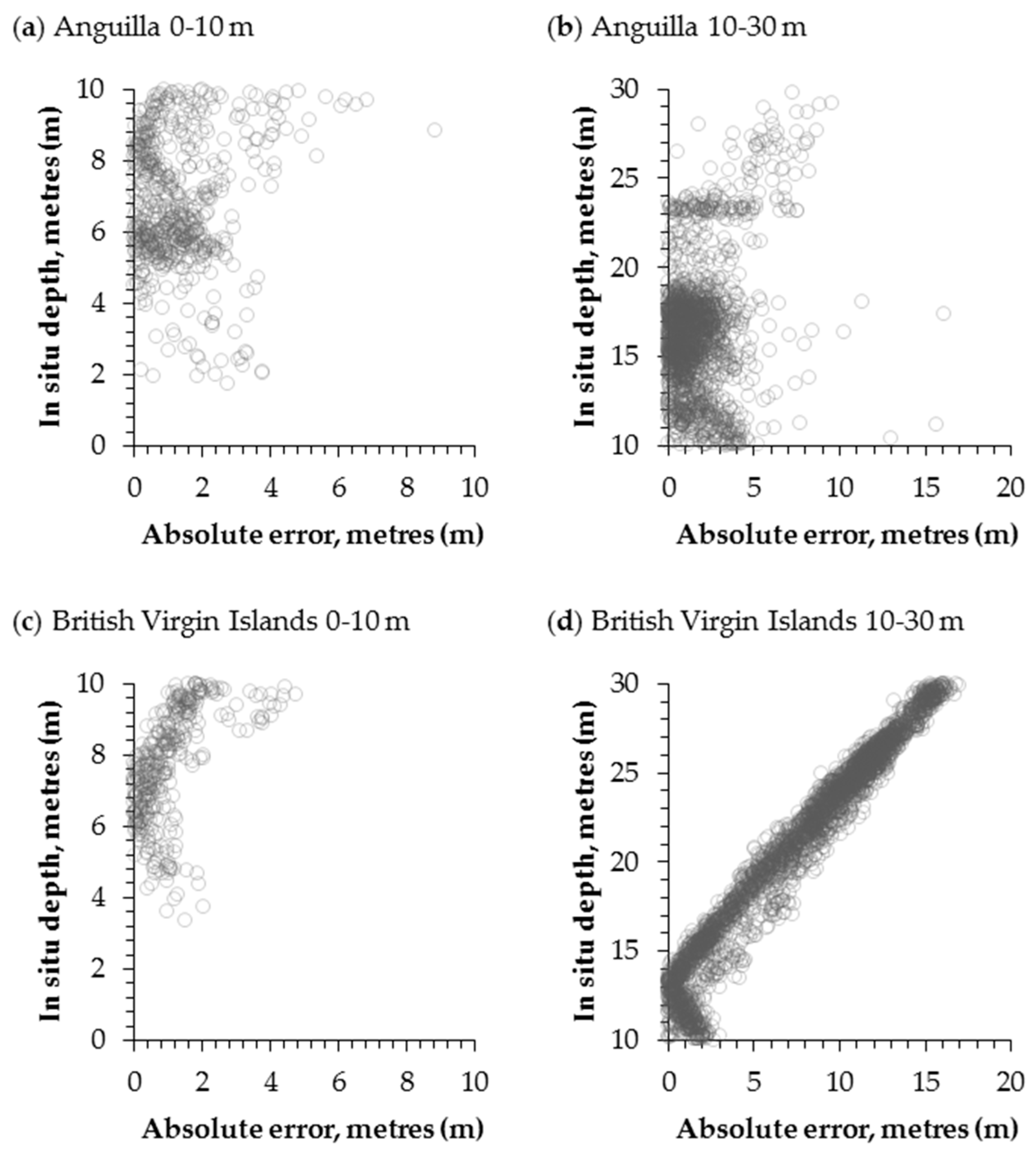
3.2. SDB Vertical Errors
4. Discussion
4.1. Suitability of the Pleiades Imagery for High-Resolution SDB Estimations
4.2. Thematic, Geographical and Methodological Comparisons
4.3. The Pros and Cons of the Current SDB Approach
- High-spatial-resolution and accurate SDB calculations of 2 m in a tropical environment which could fit into Zone A2 of CATZOC and be used for navigation purposes.
- Efficient in time, technical capacity, and computation (in comparison to state-of-the-art physics-based, photogrammetric, and adaptive-based methods).
- Minimization of statistical bias of neighbouring observations according to the first law of geography [35] by implementing two geographically independent (distance of ~147 km) MBES-derived datasets.
- Reduction of radiometric differences between the Pleiades images employed in SDB training and validation (through the use of pseudo-invariant features) which could have inflicted greater vertical errors otherwise.
- Two-year difference between the used Pleiades imagery for SDB calibration and validation and the in situ data from the site of BVI. However, while this temporal difference should theoretically impose quantitative disagreements, in this case, due to the broader absence of river runoffs in the northeast Caribbean Sea, we do not expect it to have influenced the SDB estimations.
- Empirical SDB methods like [7,8] assume homogeneous and unique water column conditions and bottom types. Here, the Anguilla and BVI benthos feature a mixture of seagrasses, sand, rocks, sponges, corals, and algae; and in conjunction with increased sedimentation in the satellite image from BVI, they violate the aforementioned empirical assumption and might have affected our observations.
- The cost of the herein in situ information by MBES survey data might be expensive and elusive for other SDB-related projects, applications, and studies. Nevertheless, the initial development and application of the current SDB processing chain have exhibited accurate results with the use of low-cost bathymetric systems and data.
4.4. Back to the Future: The Three Actors for Global SDB Coverage
- NASA’s GEDI (Global Ecosystem Dynamics Investigation)—a two-year, high-resolution spaceborne LiDAR mission deployed on the International Space Station on 5 December 2018 [37];
- NASA’s ICESat-2 (Ice, Cloud and Land Elevation Satellite-2)—a three-year, satellite-based LiDAR mission equipped with its ATLAS (Advanced Topographic Laser Altimeter System) sensor, launched on September 15 2018, whose suitability for SDB extractions in different natural environments has been already explored [38,39];
- DLR’s EnMAP (Environmental Analysis and Mapping Program) —an envisaged five-year spaceborne imaging spectroscopy mission. Expected for launch in 2020, EnMAP will offer VNIR + SWIR hyperspectral data of 30 m spatial sampling and four-day temporal revisit. This will unlock new SDB mapping and monitoring ventures with a minimum spectral sampling distance of 7.5 nm and a signal-to-noise ratio of 400:1 in the VNIR wavelength range [40].
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Coastal and Marine Ecosystems—Marine Jurisdictions: Coastline Length. Available online: https://web.archive.org/web/20120419075053/http://earthtrends.wri.org/text/coastal-marine/variable-61.html (accessed on 12 June 2019).
- OECD. An overview of the ocean economy: Assessments and recommendations. In The Ocean Economy in 2030; OECD Publishing: Paris, France, 2016; pp. 24–33. Available online: https://doi.org/10.1787/9789264251724-4-en (accessed on 12 June 2019).
- Lewis, S.; Maslin, M. Defining the Anthropocene. Nature 2015, 519, 171–180. [Google Scholar] [CrossRef] [PubMed]
- Collins, A. The Global Risks Report 2019, 14th ed.; World Economic Forum: Geneva, Switzerland, 2019; Available online: http://www3.weforum.org/docs/WEF_Global_Risks_Report_2019.pdf (accessed on 12 June 2019).
- IPBES Global Assessment Preview. Available online: https://www.ipbes.net/news/ipbes-global-assessment-preview (accessed on 12 June 2019).
- Wölfl, A.-C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Huvenne, V.A.I.; Jakobsson, M.; Jencks, J.; Johnston, G.; et al. Seafloor Mapping—The Challenge of a Truly Global Ocean Bathymetry. Front. Mar. Sci. 2019, 6, 283. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral Remote Sensing for Shallow Waters. 1. A Semianalytical Model. Appl. Opt. 1998, 37, 6329–6338. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral Remote Sensing for Shallow Waters. 2. A Semianalytical Model. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- Hodul, M.; Bird, S.; Knudby, A.; Chenier, R. Satellite derived photogrammetric bathymetry. ISPRS J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Chénier, R.; Faucher, M.-A.; Ahola, R.; Shelat, Y.; Sagram, M. Bathymetric Photogrammetry to Update CHS Charts: Comparing Conventional 3D Manual and Automatic Approaches. ISPRS Int. J. Geo-Inf. 2018, 7, 395. [Google Scholar] [CrossRef]
- Kerr, J.M.; Purkis, S. An algorithm for optically-deriving water depth from multispectral imagery in coral reef landscapes in the absence of ground-truth data. Remote Sens. Environ. 2018, 2010, 307–324. [Google Scholar] [CrossRef]
- Traganos, D.; Reinartz, P. Mapping Mediterranean seagrasses with Sentinel-2 imagery. Mar. Pollut. Bull. 2018, 134, 197–209. [Google Scholar] [CrossRef]
- Traganos, D.; Reinartz, P. Machine learning-based retrieval of benthic reflectance and Posidonia oceanica seagrass extent using a semi-analytical inversion of Sentinel-2 satellite data. Int. J. Remote Sens. 2017, 39, 9428–9452. [Google Scholar] [CrossRef]
- Poursanidis, D.; Traganos, D.; Reinartz, P.; Chrysoulakis, N. On the use of Sentinel-2 for coastal habitat mapping and satellite-derived bathymetry estimation using downscaled coastal aerosol band. Int. J. Appl. Earth Obs. Geoinf. 2019, 80, 58–70. [Google Scholar] [CrossRef]
- Pe’eri, S.; Madore, B.; Nyberg, J.; Snyder, L.; Parrish, C.; Smith, S. Identifying bathymetric differences over Alaska’s North Slope using a satellite-derived bathymetry multi-temporal approach. J. Coast. Res. 2016, 76, 56–63. [Google Scholar] [CrossRef]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating Satellite-Derived Bathymetry (SDB) with the Google Earth Engine and Sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef]
- Poursanidis, D.; Traganos, D.; Chrysoulakis, N.; Reinartz, P. Cubesats Allow High Spatiotemporal Estimates of Satellite-Derived Bathymetry. Remote Sens. 2019, 11, 1299. [Google Scholar] [CrossRef]
- Sagawa, T.; Yamashita, Y.; Okumura, T.; Yamanokuchi, T. Satellite Derived Bathymetry Using Machine Learning and Multi-Temporal Satellite Images. Remote Sens. 2019, 11, 1155. [Google Scholar] [CrossRef]
- Hell, B.; Broman, B.; Jakobsson, L.; Jakobsson, M.; Magnusson, A.; Wiberg, P. The Use of Bathymetric Data in Society and Science: A Review from the Baltic Sea. Ambio 2012, 41, 138–150. [Google Scholar] [CrossRef] [PubMed]
- International Hydrographic Organization (IHO). S-57 Supplement No. 3—Supplementary Information for the Encoding of S-57 Edition 3.1 ENC Data; International Hydrographic Organization: Monaco, Principauté de Monaco, 2014; Available online: https://www.iho.int/iho_pubs/standard/S-57Ed3.1/S-57_e3.1_Supp3_Jun14_EN.pdf (accessed on 12 June 2019).
- DPLUS0045 Anguilla Seabed Classification from MBES data. Available online: http://data.cefas.co.uk/#/View/19316 (accessed on 23 January 2019).
- DPLUS026 British Virgin Islands Seabed Classification Map. Available online: http://data.cefas.co.uk/#/View/18174 (accessed on 23 January 2019).
- DPLUS0045 Anguilla MBES Bathymetry 2m. Available online: http://data.cefas.co.uk/#/View/19312 (accessed on 23 January 2019).
- British Virgin Islands multibeam bathymetry data. Available online: http://data.cefas.co.uk/#/View/3511 (accessed on 23 January 2019).
- Astrium GEO-Information Services. Pléiades Imagery—User Guide. Available online: http://satimagingcorp.s3.amazonaws.com/site/pdf/User_Guide_Pleiades.pdf (accessed on 17 June 2019).
- Armstrong, R.A. Remote sensing of submerged vegetation canopies for biomass estimation. Int. J. Remote Sens. 1993, 14, 621–627. [Google Scholar] [CrossRef]
- Robinson, N.P.; Allred, B.W.; Jones, M.O.; Moreno, A.; Kimball, J.S.; Naugle, D.E.; Erickson, T.A.; Richardson, A.D. A Dynamic Landsat Derived Normalized Difference Vegetation Index (NDVI) Product for the Conterminous United States. Remote Sens. 2017, 9, 863. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Technical note: Simple and robust removal of sun glint for mapping shallow-water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Schott, J.R.; Salvaggio, C.; Vochok, W.J. Radiometric scene normalization using pseudo-invariant features. Remote Sens. Environ. 1988, 26, 1–16. [Google Scholar] [CrossRef]
- Collin, A.; Hench, J.L.; Pastol, Y.; Planes, S.; Thiault, L.; Schmitt, R.J.; Holbrook, S.J.; Davies, N.; Troyer, M. High resolution topobathymetry using a Pleiades-1 triplet: Moorea Island in 3D. Remote Sens. Environ. 2018, 208, 109–119. [Google Scholar] [CrossRef]
- Vinayaraj, P.; Raghavan, V.; Masumoto, S. Satellite-Derived Bathymetry using Adaptive Geographically Weighted Regression Model. Mar. Geod. 2016, 39, 458–478. [Google Scholar] [CrossRef]
- Li, J.; Schill, S.R.; Knapp, D.E.; Asner, G.P. Object-Based Mapping of Coral Reef Habitats Using Planet Dove Satellites. Remote Sens. 2019, 11, 1445. [Google Scholar] [CrossRef]
- Tobler, W.R. A computer movie simulating urban growth in the Detroit region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Allen Coral Atlas. 2019. Available online: http://www.allencoralatlas.com (accessed on 14 June 2019).
- Hancock, S.; Armston, J.; Hofton, M.; Sun, X.; Tang, H.; Duncanson, L.I.; Kellner, J.; Dubayah, R. The GEDI Simulator: A Large-Footprint Waveform LidarSimulator for Calibration and Validationof Spaceborne Missions. Earth Space Sci. 2019, 6, 294–310. [Google Scholar] [CrossRef] [PubMed]
- Forfinski-Sarkozi, N.A.; Parrish, C.E. Analysis of MABEL Bathymetry in Keweenaw Bay and Implications for ICESat-2 ATLAS. Remote Sens. 2016, 8, 772. [Google Scholar] [CrossRef]
- Li, Y.; Gao, H.; Jasinski, M.; Zhang, S.; Stoll, J. Deriving High-Resolution Reservoir Bathymetry From ICESat-2 Prototype Photon-Counting Lidar and Landsat Imagery. IEEE Trans. Geosci. Remote Sens. 2019, in press. [Google Scholar] [CrossRef]
- Guanter, L.; Kaufmann, H.; Segl, K.; Foerster, S.; Rogass, C.; Chabrillat, S.; Kuester, T.; Hollstein, A.; Rossner, G.; Chlebek, C.; et al. The EnMAP Spaceborne Imaging Spectroscopy Mission for Earth Observation. Remote Sens. 2017, 7, 8830. [Google Scholar] [CrossRef]
- Turpie, K.; Ackelson, S.; Bell, T.; Dierssen, H.; Goodman, J.; Green, O.R.; Guild, L.; Hochberg, E.; Klemas, V.V.; Lavender, S.; et al. Global Observations of Coastal and Inland Aquatic Habitats. Available online: https://hyspiri.jpl.nasa.gov/downloads/RFI2_HyspIRI_related_160517/RFI2_final_coastalpp_TurpieKevinR.pdf (accessed on 18 June 2019).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Microsoft Azure. 2019. Available online: https://azure.microsoft.com/en-us/ (accessed on 14 June 2019).
- Amazon AWS. 2019. Available online: https://aws.amazon.com/ (accessed on 14 June 2019).
- Copernicus DIAS. 2019. Available online: https://www.copernicus.eu/en/access-data/dias (accessed on 14 June 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Site | Date of Acquisition | Sensor Azimuth | Sensor Viewing Angle | Solar Azimuth | Solar Elevation |
|---|---|---|---|---|---|
| Anguilla | 15 August 2016 | 180.33 | 23.66 | 98.13 | 68.01 |
| BVI | 25 January 2016 | 179.99 | 2.51 | 147.75 | 46.49 |
| Model Depth | Intercept | B1 Coefficient | B2 Coefficient | R-Squared Value | RMSE Value, Metres (m) |
|---|---|---|---|---|---|
| 0–10 m | 0.0 | −9.06 | 7.72 | 0.94 | 1.74 |
| 10–30 m | 0.0 | −16.07 | 14.19 | 0.98 | 2.29 |
| Study Site | Model | Training Points | Validation Points |
|---|---|---|---|
| Anguilla | 0–10 m 10–30 m | 606 1840 | 607 1839 |
| British Virgin Islands | 0–10 m 10–30 m | - | 375 3260 |
| Study Site | Depth Range, Metres (m) | R-Squared Value | RMSE Value, Metres (m) |
|---|---|---|---|
| Anguilla | 0–10 | 0.23 | 1.76 |
| 10–30 | 0.56 | 2.40 | |
| British Virgin Islands | 0–10 | 0.44 | 1.39 |
| 10–30 | 0.33 | 8.99 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pike, S.; Traganos, D.; Poursanidis, D.; Williams, J.; Medcalf, K.; Reinartz, P.; Chrysoulakis, N. Leveraging Commercial High-Resolution Multispectral Satellite and Multibeam Sonar Data to Estimate Bathymetry: The Case Study of the Caribbean Sea. Remote Sens. 2019, 11, 1830. https://doi.org/10.3390/rs11151830
Pike S, Traganos D, Poursanidis D, Williams J, Medcalf K, Reinartz P, Chrysoulakis N. Leveraging Commercial High-Resolution Multispectral Satellite and Multibeam Sonar Data to Estimate Bathymetry: The Case Study of the Caribbean Sea. Remote Sensing. 2019; 11(15):1830. https://doi.org/10.3390/rs11151830
Chicago/Turabian StylePike, Samuel, Dimosthenis Traganos, Dimitris Poursanidis, Jamie Williams, Katie Medcalf, Peter Reinartz, and Nektarios Chrysoulakis. 2019. "Leveraging Commercial High-Resolution Multispectral Satellite and Multibeam Sonar Data to Estimate Bathymetry: The Case Study of the Caribbean Sea" Remote Sensing 11, no. 15: 1830. https://doi.org/10.3390/rs11151830
APA StylePike, S., Traganos, D., Poursanidis, D., Williams, J., Medcalf, K., Reinartz, P., & Chrysoulakis, N. (2019). Leveraging Commercial High-Resolution Multispectral Satellite and Multibeam Sonar Data to Estimate Bathymetry: The Case Study of the Caribbean Sea. Remote Sensing, 11(15), 1830. https://doi.org/10.3390/rs11151830