Modelling the Surface of Racing Vessel’s Hull by Laser Scanning and Digital Photogrammetry




Abstract
1. Introduction
- fair to all vessels,
- open, transparent and freely available,
- have rules that are objective, unbiased and open to new inputs,
- have ratings that are simple but accurate,
- have flexible evaluation capabilities for use in different race types,
- easy to use and understandable,
- managed locally but globally available [1].
- the X-axis—longitudinally with the main axis of the hull (centreline), with 0 at the stem and positive towards the stern,
- the Y-axis—transversely to 0 in the main axis of the hull and positive to outwards,
- the Z-axis—vertical with 0 at the waterline and positive upwards.
- using special electromechanical meters and instruments (classic, old method),
- by geodesy—a tacheometric method using a total station (current method),
- based on the data from the sailboat design plans, after approval by ORC.
2. Methods of Measurements
2.1. Basic Propositions
- Objects larger in size, such as cabin sailboat hull, require greater handling space and a sufficient distance from the object to capture its shape.
- Since the vessel itself should be located outside of the water on a sufficiently rigid structure (trail car, suspension system, supporting structure), the measured surface itself can be less or more covered by this construction, which can lead to the extension of measurement from multiple positions and the subsequent processing of obtained data.
- The used technology should provide a fast (approximately a few hours), accurate (with accuracy up to 2–3 millimetres) and financially not a very demanding measurement of the sailboat hull, ideally applicable directly in the location of the measured vessel. Manipulation with the necessary equipment should be as simple as possible.
- Terrestrial Laser Scanning (TLS),
- Convergence case of digital Close-Range Photogrammetry (CRP),
- Structure-from-Motion (SfM) method of digital CRP.
2.2. Terrestrial Laser Scanning
2.3. Convergence Case of Digital CRP
2.4. Structure from Motion Photogrammetry
- Saturn 720—a tourist sailboat of the European standard for four to five people (about 7.2 m in length and 2.5 m in width), currently not manufactured;
- Saturn 24 RC—the successor to the Saturn 720;
- Saturn 23 GT—the latest product, sports version with retractable keel (length approx. 7.0 m and width 2.5 m).
3. Measurements and Results
3.1. The First Stage
3.1.1. Saturn 720
3.1.2. Saturn 24 RC and Saturn 23 GT
3.1.3. Issues Encountered
- Placement of the sailboat—the placement of the measured object on the trailer did not allow sufficient imaging of the lower parts of the hull, especially in its central part. Also, the changing conditions in the exterior created undesirable changes in the surface illumination during the imaging—leading to problems during image orientation by SfM method. On the other hand, the use of some suspension system could increase the financial demands, since not everyone is able to do so, and it would be necessary to physically transfer the measured sailboat and pay for the use of such suspension system for the required time.
- TLS—during the TLS measurement, the only significant issue was the positioning of suitable scanning stations to minimise the number of stations and maximise the coverage of the hull by the laser beam. The most significant restriction was the placement of the sailboat on the trailer (many obscured parts, too low placement).
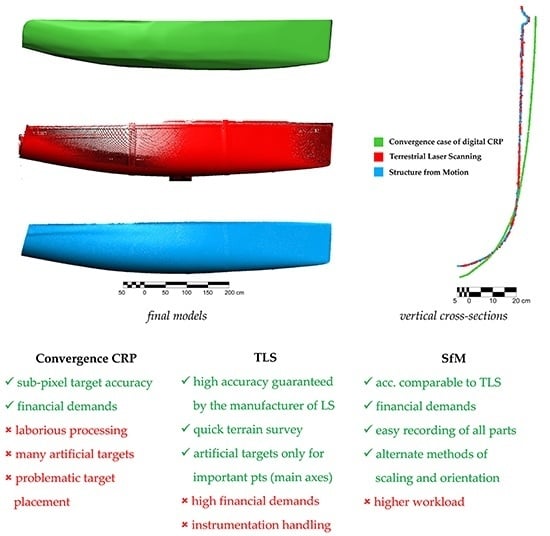
- The convergent case of CRP—it is clear from the obtained results that convergence case of CRP is the least suitable technology for such modelling of racing vessel’s hull. Although the image processing by convergence CRP provides high precision results and is not very costly, the points of individual cross-sections through the hull cannot be sufficiently well targeted (for example by simple dot targets) due to the size and placement of the object. If the sailboat is placed on a trailer, some parts are obscured and not available for imaging. If the sailboat is hung on a suspension system, the question of the safety is arising regarding the placing of targets on the bottom of the hull.
- SfM photogrammetry—the SfM photogrammetry provides fast imaging and image processing of obtained images but its biggest issue is a simple, uniform texture of the hull, which, in addition, creates strong reflections in the case of newer and not so worn-out sailboats. For older vessels, this issue should not be so significant. However, the most appropriate methodology of measurement should not be limited by certain types of surface.
3.2. The Second Stage
- Of all three sailboats, only one of them was used—Saturn 24RC (logistics reasons + the most common type of hull surface and the most problematic one).
- The sailboat was moved into the interior from the outside. Since the owner had this sailboat placed in the “out-of-season“ customised building (sheet metal building of hangar-style), it was placed inside it. Moreover, there was also a suspension system adapted to hang the sailboat up to a height of about 1.5 m above the floor using two hanging straps (Figure 10).
- Due to the fact that the hull of the sailboat is factory-symmetrical by the longitudinal axis (axis X—Figure 1), only one half of the hull was imaged and processed by the SfM photogrammetry, which greatly saved the time of imaging and image processing. Within the TLS, the whole hull was scanned.
- The convergence case of CRP was assessed as insufficient and inadequate and therefore, no longer used.
- The points defining the main axes of the required coordinate system were again targeted by Leica Retro Reflective Targets. 12-bit coded targets were used for the transformation of results into the common required coordinate system.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- ORC—World Leader in Rating Technology. Available online: http://www.orc.org/ (accessed on 15 November 2017).
- ORC Rating System 2019, ORC International and ORC Club. Offshore Racing Congress. 2019. Available online: http://www.orc.org/rules (accessed on 01 May 2019).
- Kalatzis, Y. International Measurement System (IMS); Offshore Committee, Hellenic Sailing Federation: Kallithea, Greece, 2012. [Google Scholar]
- Koelman, H. Application of a photogrammetry-based system to measure and re-engineer ship hulls and ship parts: An industrial practices-based report. Comput. Aided Des. 2010, 42, 731–743. [Google Scholar] [CrossRef]
- Roca-Pardiñas, J.; López-Alvarez, F.; Ordóñez, C.; Menéndez, A.; Bernardo-Sánchez, A. Terrestrial laser scanning used to detect asymmetries in boat hulls. Opt. Eng. 2012, 51, 013605. [Google Scholar] [CrossRef]
- Ahmed, Y.; Jamail, A.; Yaakob, O. Boat Survey Using Photogrammetry Method. Int. Rev. Mech. Eng. 2012, 6, 1643–1647. [Google Scholar]
- Martorelli, M.; Pensa, C.; Speranza, D. Digital Photogrammetry for Documentation of Maritime Heritage. J. Marit. Archaeol. 2014, 9, 81–93. [Google Scholar] [CrossRef]
- Costa, E.; Balletti, C.; Beltrame, C.; Guerra, F.; Vernier, P. Digital Survey Techniques for the Documentation of Wooden Shipwrecks. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech, 12–19 July 2016; Volume XLI-B5, pp. 237–242. [Google Scholar] [CrossRef]
- Kawasaki, J.; Miyoshi, J. Measuring method hull of small fishing boats by using laser telemeter: Considering use of NURBS to draw hull lines. In Proceedings of the 2016 Techno-Ocean, Kobe, Japan, 6–8 October 2016. [Google Scholar] [CrossRef]
- Menna, F.; Troisi, S. Photogrammetric 3D modelling of a boat’s hull. In Proceedings of the Optical 3-D Measurement Techniques VIII, Zurich, Switzerland, 9–12 July 2007; pp. 347–354. [Google Scholar]
- Menna, F.; Nocerino, E.; Troisi, S.; Remondino, F. A photogrammetric approach to survey floating and semi-submerged objects. Proc. SPIE 2013, 8791, 87910. [Google Scholar] [CrossRef]
- Menna, F.; Nocerino, E.; Troisi, S.; Remondino, F. Joint Alignment of Underwater and above-the-Water Photogrammetric 3D Models by Independent Models Adjustment. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2015, XL-5/W5, 143–151. [Google Scholar] [CrossRef]
- Guidi, G.; Micoli, L.; Russo, M. Boat’s Hull Modeling with Low-Cost Triangulation Scanners. In Proceedings of the Volume 5665 of Electronic Imaging 2005, San Jose, CA, USA, 16–20 January 2015; Volume Videometrics VIII. [Google Scholar] [CrossRef]
- Abbas, M.A.; Lichti, D.D.; Chong, A.; Setan, H.; Majid, Z.; Lah, L.C.; Idris, K.M.; Ariff, M.F.M. Improvements to the accuracy of prototype ship models measurement method using terrestrial laser scanner. Measurement 2017, 100, 301–310. [Google Scholar] [CrossRef]
- Deparday, J.; Bot, P.; Hauville, F.; Augier, B.; Rabaud, M. Full-scale flying shape measurement of offwind yacht sails with photogrammetry. Ocean. Eng. 2016, 127, 135–143. [Google Scholar] [CrossRef][Green Version]
- Di Paola, F.; Ingrassia, T.; Lo Brutto, M.; Mancuso, A. A reverse engineering approach to measure the deformations of a sailing yacht. Lecture Notes in Mechanical Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 555–563. [Google Scholar] [CrossRef]
- Higgs, P. Using Photogrammetry for the Production of Boat Lines. Available online: https://www.woodenboatguildtas.org.au/wp/knowledge/presentation/using-photogrammetry-for-the-production-of-boat-lines/ (accessed on 15 November 2017).
- Yaakob, O.; Majid, Z.; Ariff, M.; Idris, K.; Ahmad, B. Measuring Small Boats Using Non-Contact Method. J. Transp. Syst. Eng. 2014, 1, 38–45. [Google Scholar]
- Smítka, V.; Štroner, M. 3D scanner point cloud denoising by near points surface fitting. Proc. SPIE 2013, 8791, 87910C. [Google Scholar] [CrossRef]
- Ullman, S. The Interpretation of Structure from Motion; Series B. Biological Sciences; The Royal Society of London: London, UK, 1979; Volume 203, pp. 405–426. [Google Scholar] [CrossRef]
- Chandran, V.; Elgar, S. Pattern Recognition Using Invariants Defined From Higher Order Spectra—One Dimensional Inputs. IEEE T. Signal Proces. 1993, 41, 205–212. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.; Szeliski, R. Modeling the World from Internet Photo Collections. Int. J. Comput. Vis. 2007, 80, 189–210. [Google Scholar] [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Blišťan, P.; Kovanič, Ľ.; Zelizňáková, V.; Palková, J. Using UAV photogrammetry to document rock outcrops. Acta Montan. Slovaca 2016, 21, 154–161. [Google Scholar]
- Urban, R.; Štroner, M.; Křemen, T.; Braun, J.; Möser, M. A novel approach to estimate systematic and random error of terrain derived from UAVs: A case study from a post-mining site. Acta Montan. Slovaca 2018, 23, 325–336. [Google Scholar]
- Moudrý, V.; Urban, R.; Štroner, M.; Komárek, J.; Brouček, J.; Prošek, J. Comparison of a commercial and home-assembled fixed-wing UAV for terrain mapping of a post-mining site under leaf-off conditions. Int. J. Remote Sens. 2018, 40, 555–572. [Google Scholar] [CrossRef]
- PhotoModeler Technologies. PhotoModeler Scanner (Version 2010). 2010.
- Fraser, C. SLAM, SfM and photogrammetry: What’s in a name? In Proceedings of the ISPRS Technical Comission II: Symposium 2018 “Towards Photogrammetry 2020”, Riva del Garda, Italy, 3–7 June 2018. [Google Scholar]
- Rinaudo, F. Photogrammetry in Cultural Heritage—Is it only SfM software? In Proceedings of the ISPRS Technical Comission II: Symposium 2018 “Towards Photogrammetry 2020”, Riva del Garda, Italy, 3–7 June 2018. [Google Scholar]
- Žiška, J.; Marčiš, M.; Haličková, J.; Fraštia, M. Fotogrametrická rekonštrukcia tvaru skifu. In Telesná výchova, Šport, Výskum na Univerzitách; STU Bratislava: Bratislava, Slovakia, 2010; pp. 196–203. [Google Scholar]
- CloudCompare (version 2.10.2 Zephyrus). Available online: http://www.cloudcompare.org/ (accessed on 15 April 2019).
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SfM (RC) | CRP (PMSC) | |
|---|---|---|
| No. of used images | 120 | 28 |
| Average imaging distances | 8.5 m | |
| Time of software processing | 8 h | 24 h |
| No. of reconstructed points | 1.3 mil. | 524 |
| Ground Sampling Distance | 1.3 mm/pix | |
| RMS of image orientation | 0.375 pix | 0.228 pix |
| Acc. in the reference system (overall mean spatial error) | 4.1 mm | 2.1 mm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bartoš, K.; Pukanská, K.; Repáň, P.; Kseňak, Ľ.; Sabová, J. Modelling the Surface of Racing Vessel’s Hull by Laser Scanning and Digital Photogrammetry. Remote Sens. 2019, 11, 1526. https://doi.org/10.3390/rs11131526
Bartoš K, Pukanská K, Repáň P, Kseňak Ľ, Sabová J. Modelling the Surface of Racing Vessel’s Hull by Laser Scanning and Digital Photogrammetry. Remote Sensing. 2019; 11(13):1526. https://doi.org/10.3390/rs11131526
Chicago/Turabian StyleBartoš, Karol, Katarína Pukanská, Peter Repáň, Ľubomír Kseňak, and Janka Sabová. 2019. "Modelling the Surface of Racing Vessel’s Hull by Laser Scanning and Digital Photogrammetry" Remote Sensing 11, no. 13: 1526. https://doi.org/10.3390/rs11131526
APA StyleBartoš, K., Pukanská, K., Repáň, P., Kseňak, Ľ., & Sabová, J. (2019). Modelling the Surface of Racing Vessel’s Hull by Laser Scanning and Digital Photogrammetry. Remote Sensing, 11(13), 1526. https://doi.org/10.3390/rs11131526