1. Introduction
Radar altimeters transmit pulses towards the sea at a nadir and then receive the echoes reflected from the sea surface within an altimeter footprint. The received echoes are sampled with a specific time resolution. The time series of the power of the samples is commonly referred to as a “waveform”, and each cell within a waveform is called a “gate”. Geophysical parameters, including the sea surface height (SSH), significant wave height (SWH), and the wind speed (related to backscatter coefficient, sigma0), are retrieved from the waveforms by a process called “retracking”. The so-called Brown mathematical model [
1,
2] is the standard model used for this process.
When surfaces are homogeneous within an altimeter footprint, a typical Brown-type waveform has a well-defined shape consisting of three parts: thermal noise, a fast-rising leading edge, and a decaying trailing edge. However, the waveform will be corrupted and deviate from the shape of the Brown waveform under heterogeneous surface conditions. The waveform corruption is particularly serious over coastal areas [
3]. In recent years, the impact of contamination sources over coastal areas, like calm waters, ships, land masses, etc., on waveform retracking have been discussed [
4,
5]. Moreover, heterogeneous surfaces due to sea slicks are commonly observed even far from the coast in all previous radar altimeter missions. For example, about 6% of the Jason-1 measurements are corrupted by sea slicks [
6].
Geophysical parameters cannot be correctly retrieved by applying the Brown model directly to entire corrupted waveforms. Therefore, several subwaveform retrackers have been proposed in recent years [
7,
8]. These retrackers use only a portion of the waveform trailing edge close to the leading edge, which is equivalent to reducing the size of the altimeter footprint. Hence, they can effectively reduce noise in the waveform trailing edge. However, the location of corrupted echoes in individual waveforms depends on the location of the contamination sources relative to the altimeter nadir track. Subwaveform retrackers may incorrectly estimate the geophysical parameters if corrupted echoes occur within the estimation window of subwaveform retrackers. Therefore, an ideal subwaveform retracker is needed to automatically adjust the length of the estimation window according to the uniformity of the sea surface.
An adapting leading edge subwaveform retracker (ALES) with an estimation window length proportional to the SWH estimation has been proposed in recent years [
9]. The SWH-dependent estimation window aims to include all gates constituting the leading edge and only minimal gates of the trailing edge. Hence, it can retrack both open ocean and coastal data with the same accuracy without being subject to contamination in the trailing edge. However, the determination of the estimation window strongly depends on the SWH estimation of noisy individual waveforms.
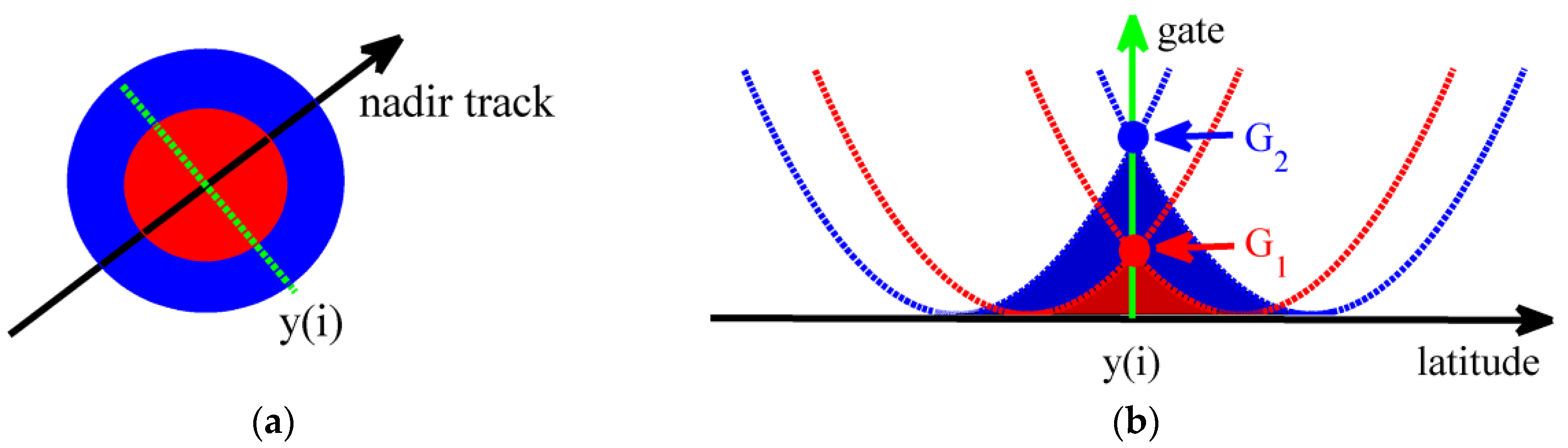
Recently, Wang and Ichikawa proposed a post-processing retracking method to identify waveforms of along-track adjacent observations [
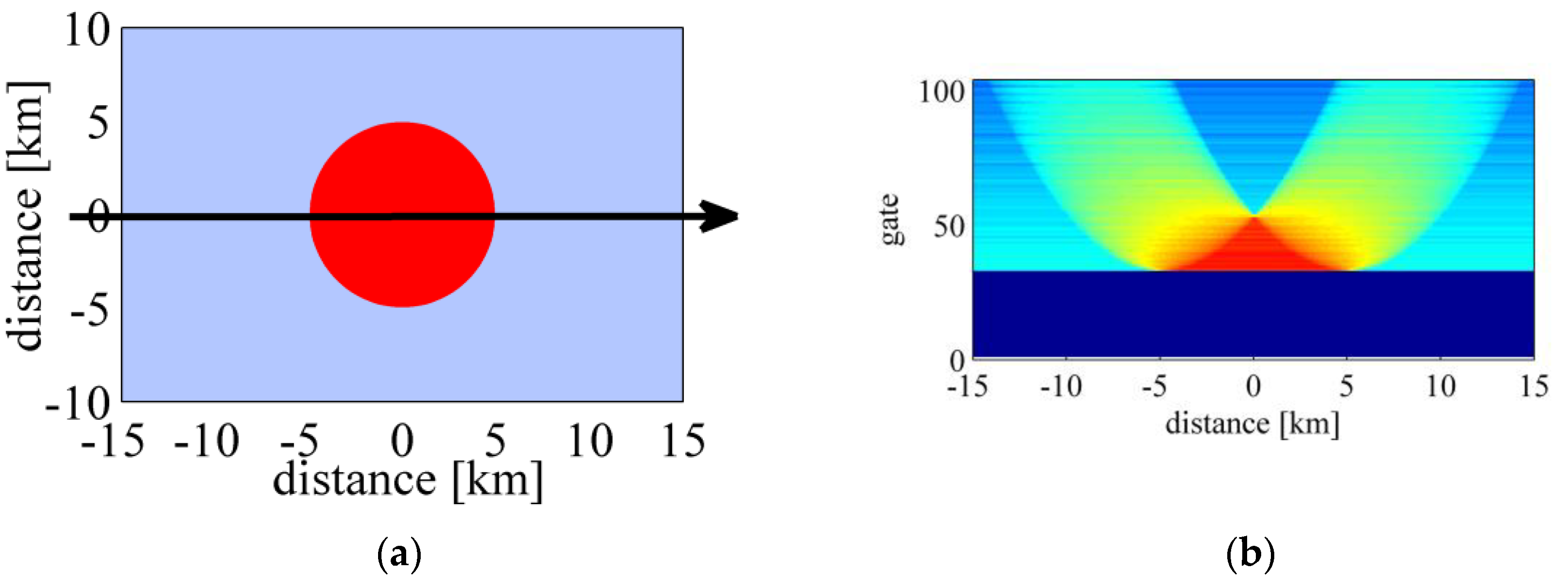
10]. Generally, significant echoes from a point target, such as a calm sea surface in a semi-closed bay, result in a parabolic signature in the sequential along-track waveforms (hereafter, referred to as echograms). By masking these parabolic shapes, the SSH information in the mid-latitudes (near Taiwan and the Tsushima Islands, Japan) were successfully retracked. However, corrupted echoes from wide-area sources, such as sea slicks, do not show as parabolas in echograms. The above method cannot be applied to bright echoes from point targets like a calm bay with a small area.
The present study proposes a subwaveform retracker which considers the possible effects of various corruption sources through automatic adjustment of the length of the estimation window. Different from the ALES retracker, the estimation window is no longer determined by a single waveform but depends on the footprint size with homogeneous sea surface roughness, using spatial restriction conditions in echograms.
5. Discussion
For pulse limited radar altimeters, the length of the waveform trailing edge needs to be large enough when fitting the Brown model to average out the effects of surface gravity waves, especially for data products with a higher rate than 1 Hz whose waveforms are noisy. However, it is difficult to ensure the uniformity of sea water reflectance in large footprints. Therefore, the choice of the proper footprint size or the length of the trailing edge are some of the most important factors for subwaveform retrackers. For example, ALES determines the estimation window of the subwaveform by introducing its own SWH estimation to average out the noise effects on the waveform due to surface gravity waves. However, as shown in
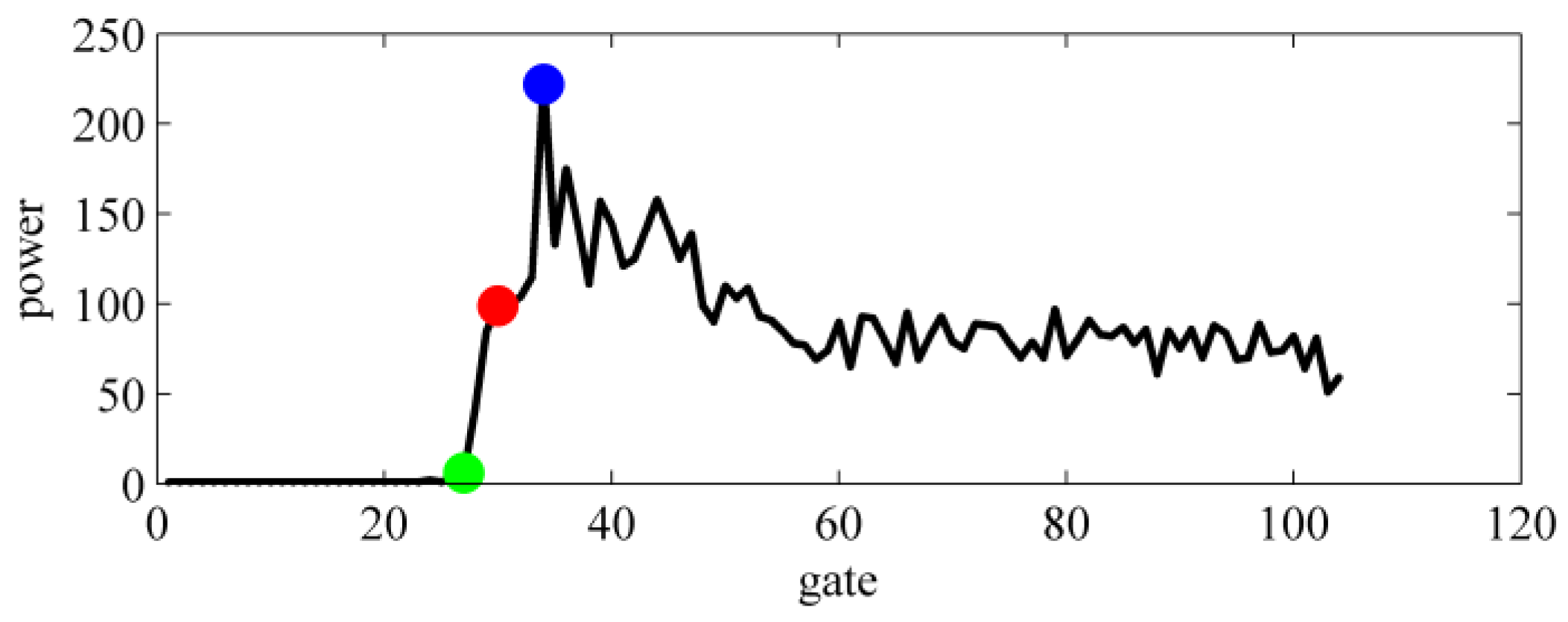
Figure 3, it is generally difficult to determine the SWH itself or the leading-edge length in an individual waveform. Moreover, as shown in
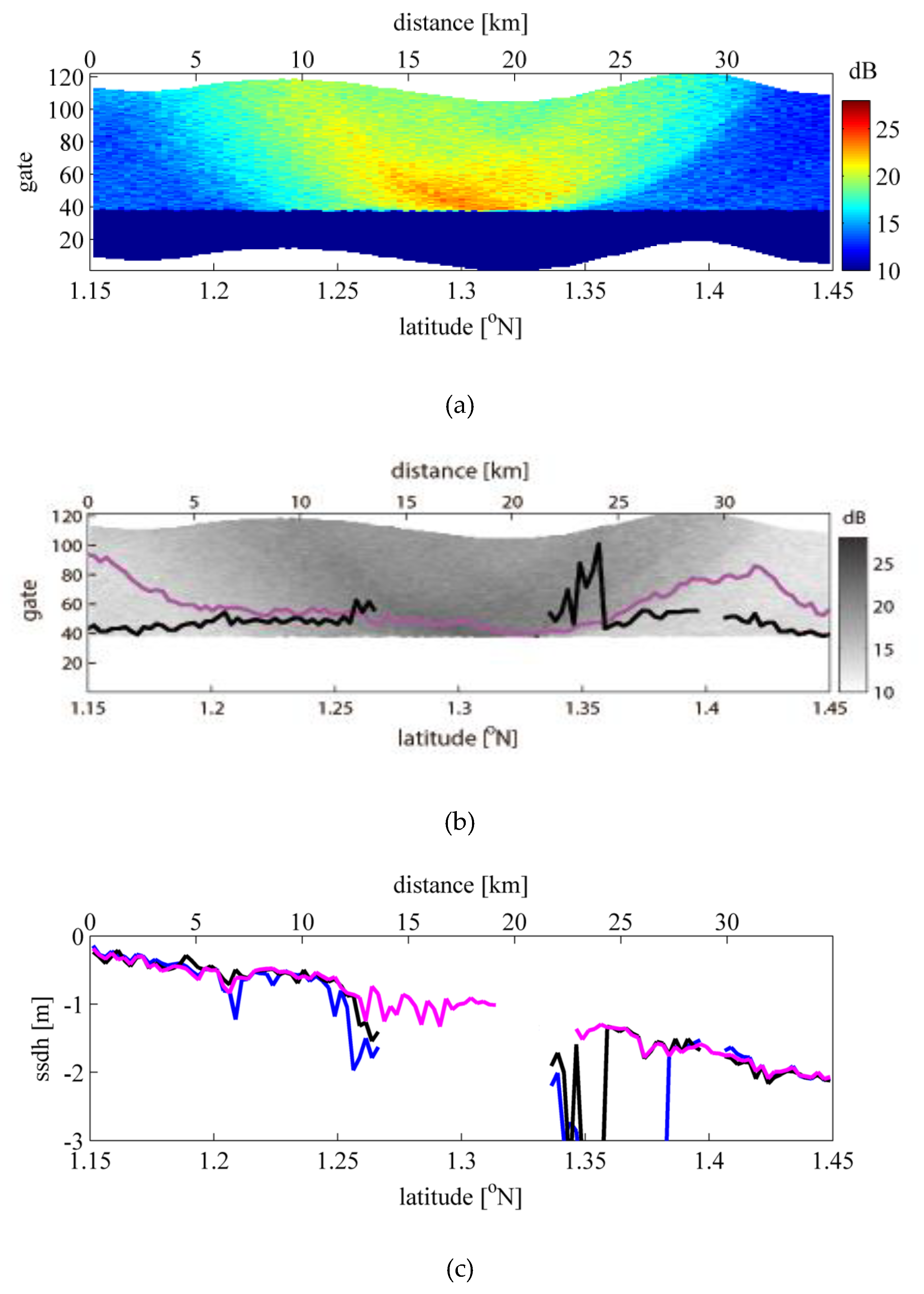
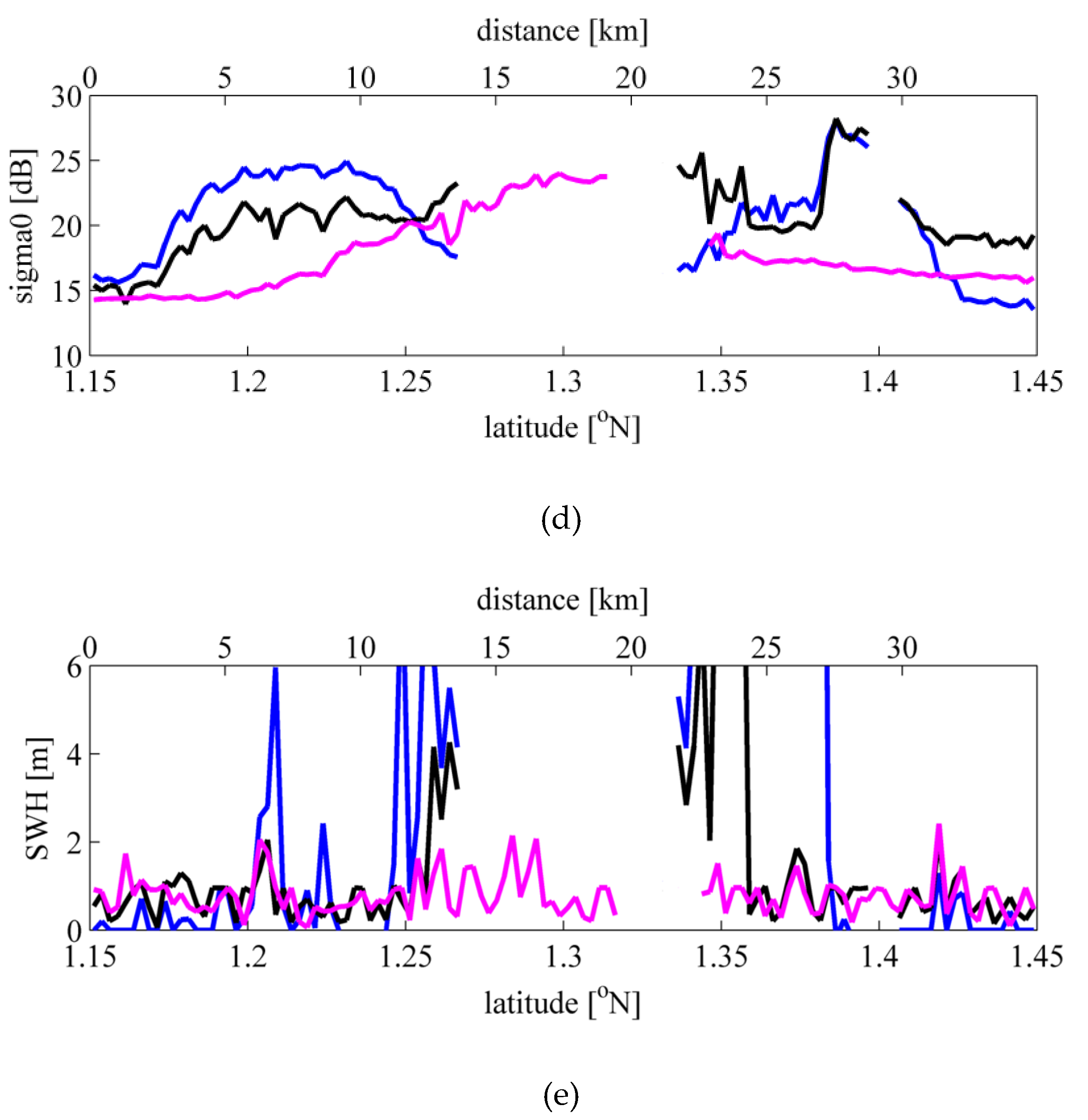
Figure 5, corrupted estimations of the trailing edge slope due to contaminated echoes from slicks could ruin the sigma0 and SWH estimates.
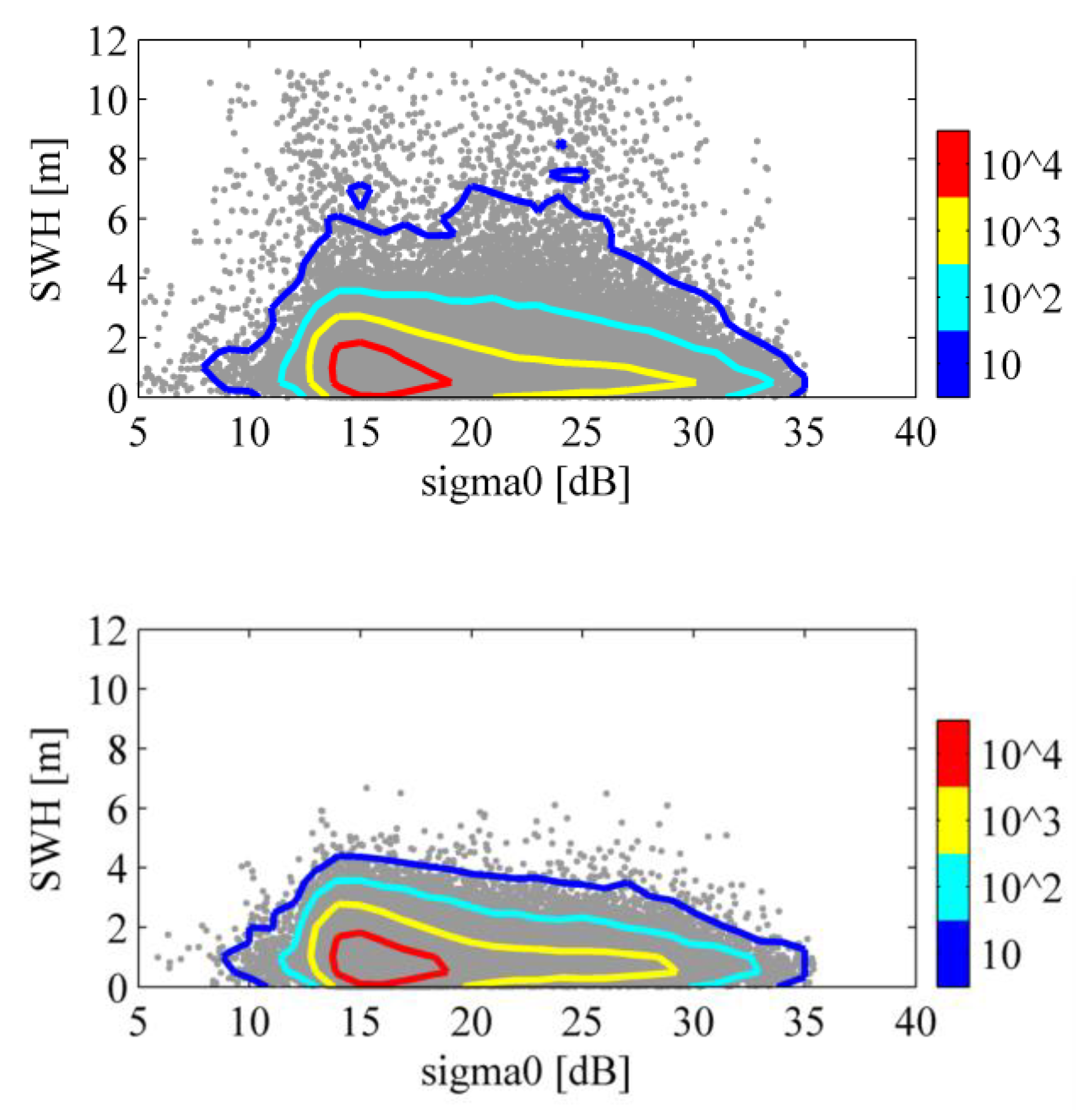
In order to evaluate the SWH and sigma0 estimates, scatter plots along Pass 101 are shown in
Figure 11. Gray points represent the scatter points of SWH with sigma0 retrieved using the filtered ALES (top) and the present study (bottom). Note that the additional ALES data with sigma0 values from 5 to 7 dB and 30 to 35 dB were plotted for comparison. They are filtered by criteria in
Table 1. The scatter plots are gridded with step sizes of 0.5 dB for sigma0 and 0.5 m for SWH, respectively, and the number of data points located within every grid point is shown using solid count lines in
Figure 11. The contour lines are 10, 100, 1000, and 10,000 data numbers for each grid point.
In both datasets, data density distributions with more than 100 points were similar. The maximum data density was located at about 16 dB (sigma0) and 1 m (SWH), which were consistent with the weak wind and low wave height conditions typical in this region. In general, the contour lines show horizontally stretched oval shapes, suggesting smaller SWH values as sigma0 increases, i.e., with lower wind speeds. This tendency is consistent with the absence of significant swells, which is typical in semi-closed seas.
However, the contour lines with 10 data points behaved differently. In general, the ALES results were significantly scattered in the region of low data density. Unrealistically large SWH values of over 6 m were often found, although the data density in a grid was lower than 10. On the contrary, the contour line with 10 data points for the present study followed similar shapes to the other contour lines with larger data densities. Therefore, besides the SSDH results, the method proposed in the present study also improves sigma0 and SWH estimations.
In the present study, the length of the trailing edge was determined so that the echo intensity within the given footprint size did not significantly change in the echogram, i.e., integrated waveforms from the adjacent along-track points. A shorter trailing edge length indicates the presence of inhomogeneous sea surface roughness near the nadir, such as a case close to the edge of slicks. However, if the trailing edge length is too short, high-frequency noises in the trailing edge may not be removed properly in fitting of the Brown model. In other words, a criterion of the minimum length of the waveform trailing edge should be applied in the analysis to ensure reliable fitting of the Brown model.
In
Table 3, statistics are listed for different criteria of the minimum trailing edge length. Together with the statistics listed in
Table 2, the occurrence of the abnormal SWH is also counted in
Table 3 as the cases where SWH exceeds 4 m even with low wind conditions (sigma0 is larger than 20 dB). In general, all four values decreased when the criterion became larger. The occurrence of abnormal SSDH estimations was most sensitive to changes of the criteria. In other words, the criterion of the minimum length of the trailing edge was a trade-off between the number of data points and the quality of the data. If the criterion is set as one gate, the data acquisition rate exceeds 99%, but abnormal SSHA values could be included although they were infrequent (approximately 100 times out of more than 480,000 occurrences). On the other hand, if the analysis is limited to a larger footprint size with more than 10 trailing edge gates, the abnormal SSHAs are rarely included, but the data acquisition rate decreases to nearly 80%. In the present study, three gates were provisionally used for the criterion of the minimum length of the trailing edge in order to obtain a similar data acquisition rate with the filtered ALES data, although the estimation accuracy would be less than when using larger criteria gates. Nevertheless, both the SSDH standard deviation and the occurrence of abnormal estimations were much better than the filtered ALES data (
Table 2).
Note that the occurrence number of abnormal SWH estimations was less sensitive to changes of the criteria. Since the SWH was estimated form the length of the leading edge, the estimation error of the SWH would be large only when the trailing edge near the stop gate was contaminated. The difference of the stop gates between ALES and the present study is outlined in
Figure 3. In a case when the red point is the true leading edge top, the peak of the blue point would be caused by contaminated echo from a slick near the nadir, which should produce a large error in the SWH estimation if included within the estimation window. Also note that the echo intensity in the trailing edge in
Figure 3 is relatively large until gate 60, which would suggest that the influence of the possible slick is present between gates 32 and 60, and they would not be fully removed even if a long trailing edge is used.
The only way to remove these possible contaminations between gates 32 and 60 in
Figure 3 is to limit the estimation window before the gate at the blue point. In the present study, the estimation window would be limited if the echo intensity at the blue point and/or surroundings in the echogram exceeded the practically determined threshold (3.5 dB). In other words, this threshold controls the sensitivity of the present method to slicks. At the same time, in order to smooth out noises in the trailing edge of the waveform, the threshold should not be too sensitive to the high-frequency noises of the waveforms. In the present study, the threshold value was practically determined as 3.5 dB by testing various values.
6. Summary
A new post-processed subwaveform retracking method is proposed in the present study, which uses variable footprint sizes with homogeneous sea surface roughness in order to hold proper fitting conditions of the Brown model. The echograms, or the integrated waveforms of the adjacent along-track observation points, were used to identify the subwaveform window size, which conquers uncertainty in the identification of contaminated echoes in a single waveform.
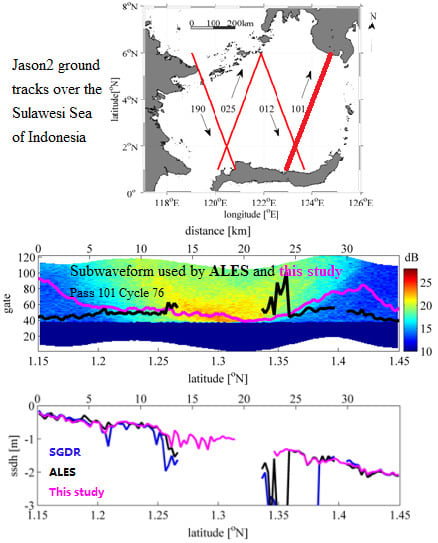
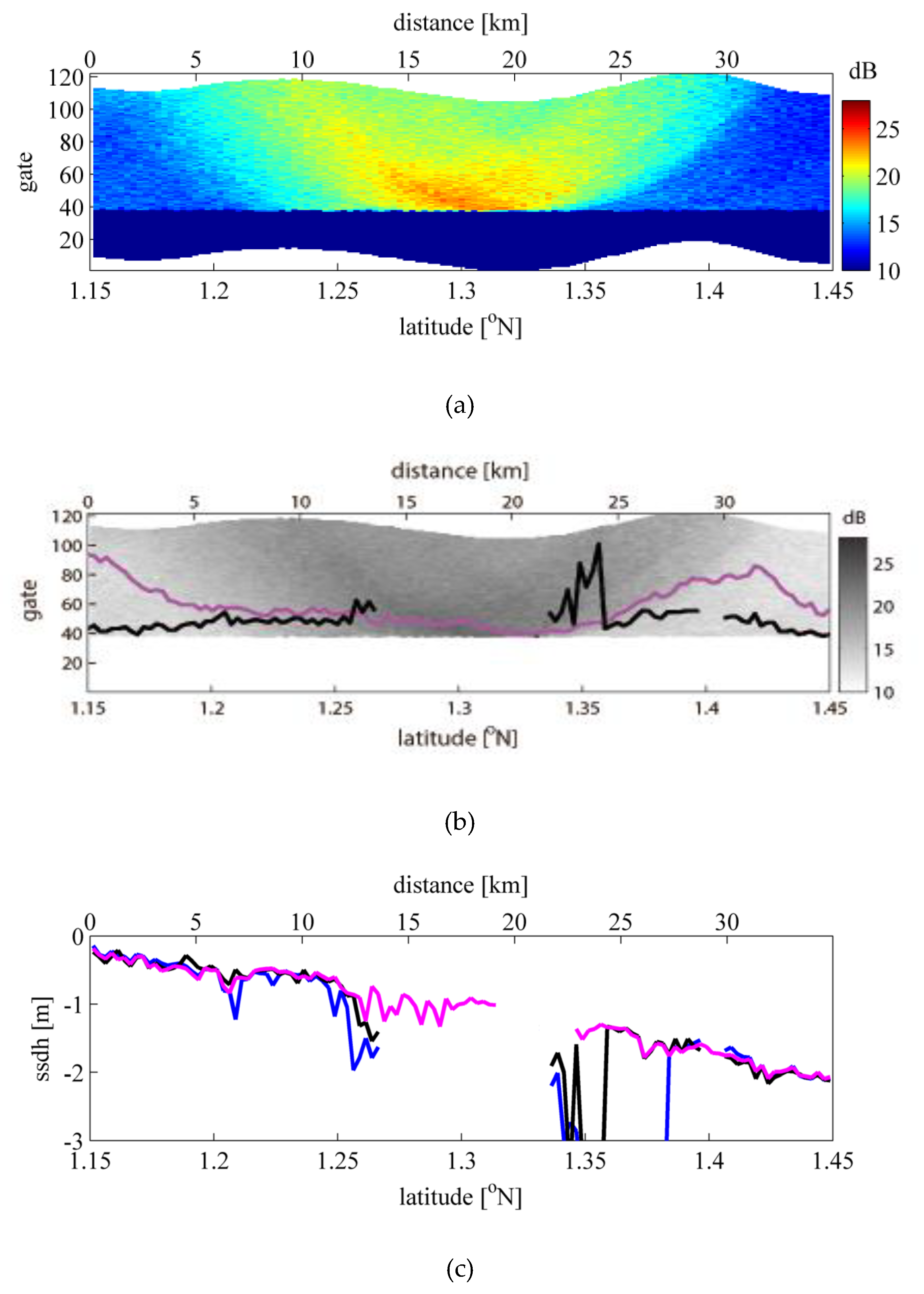
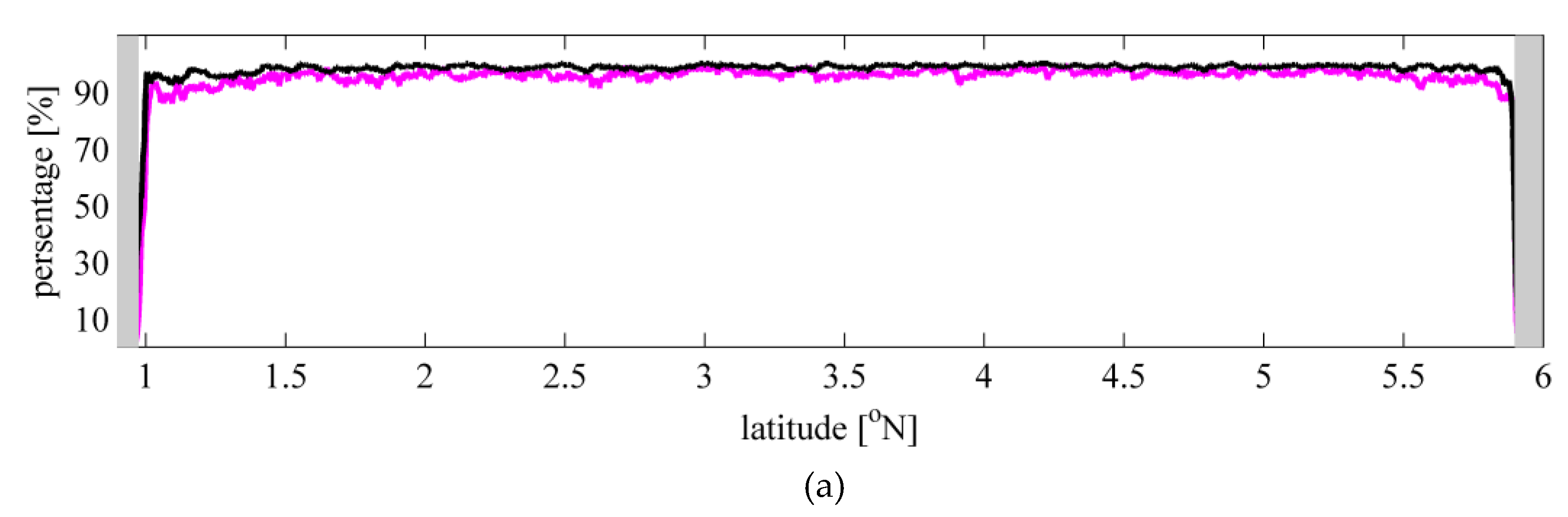
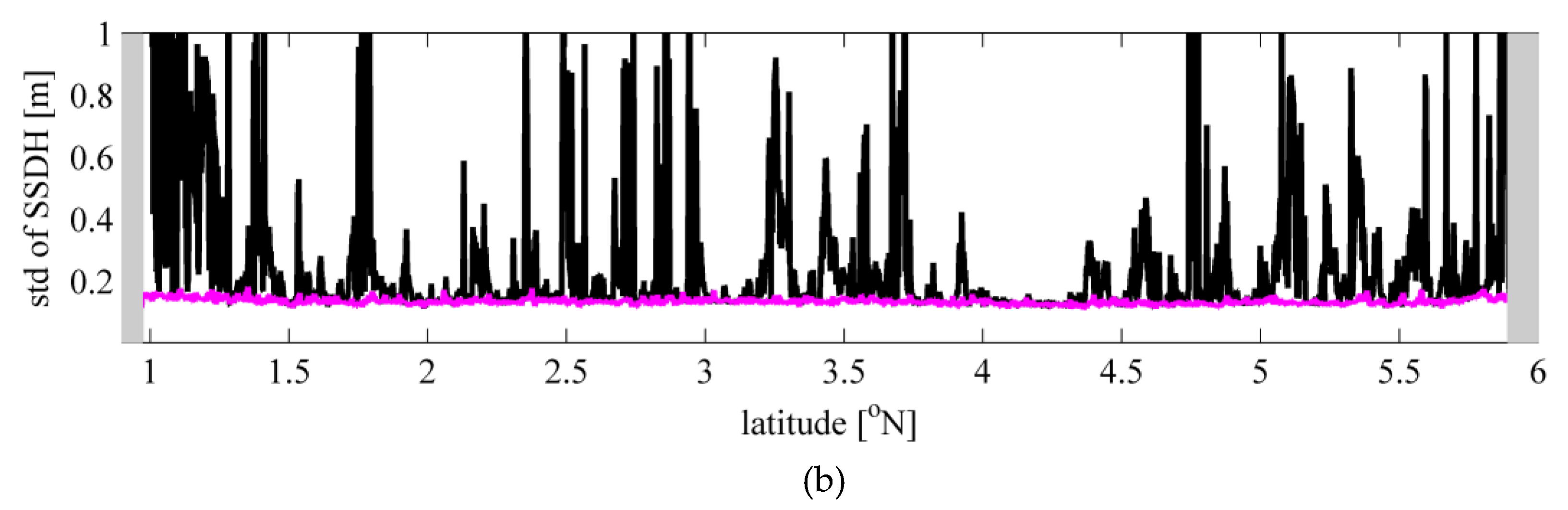
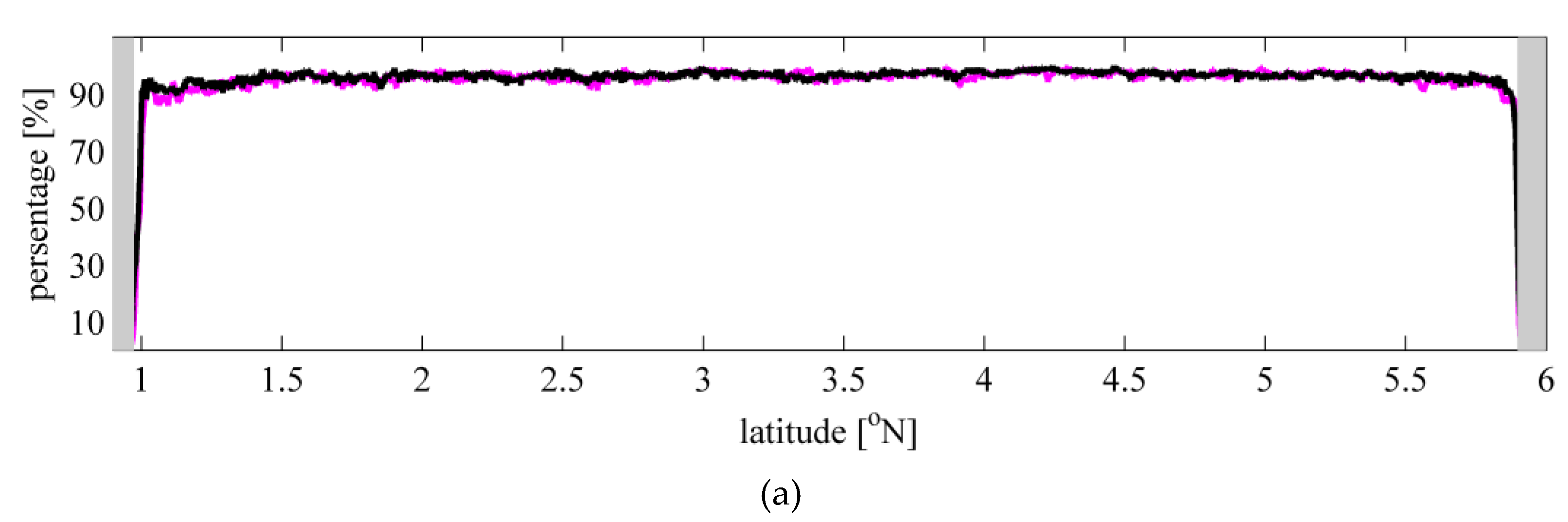
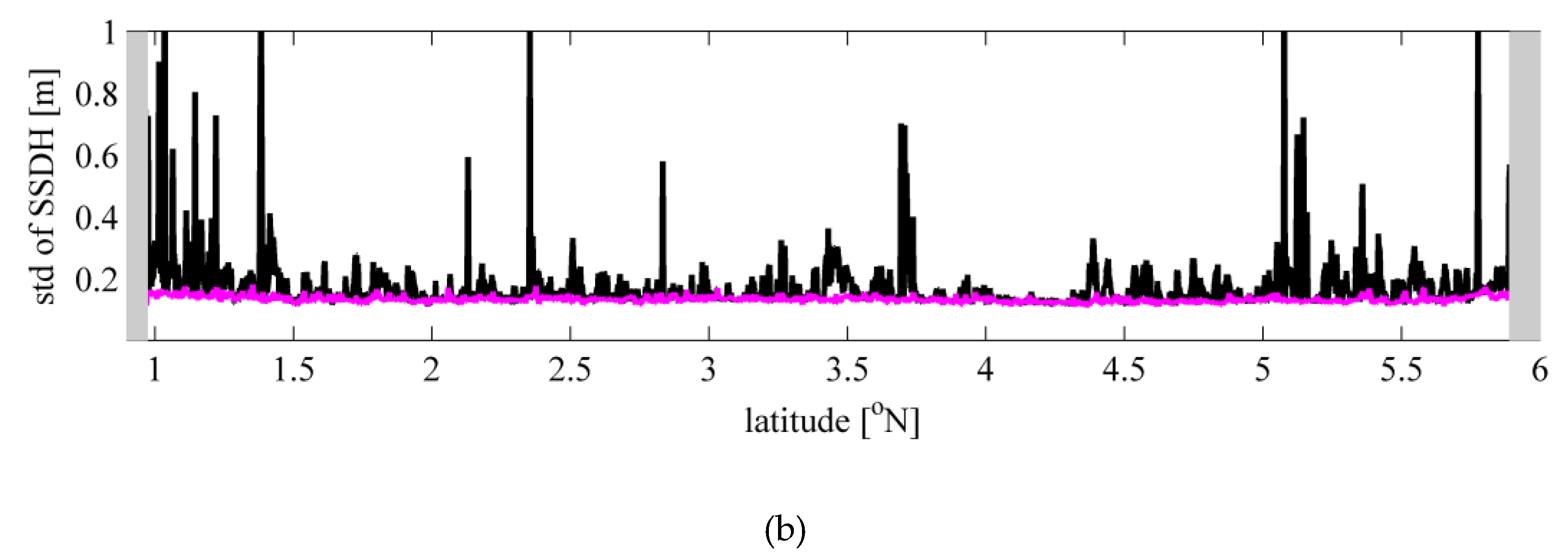
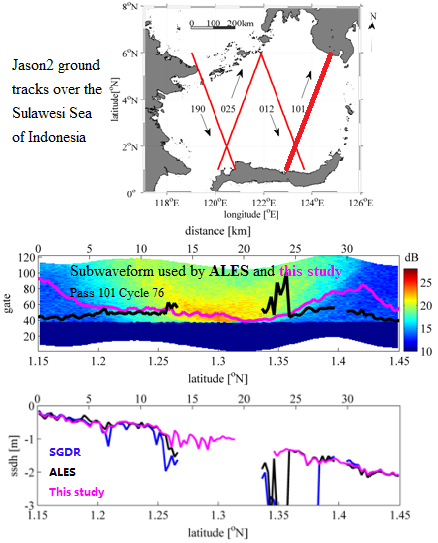
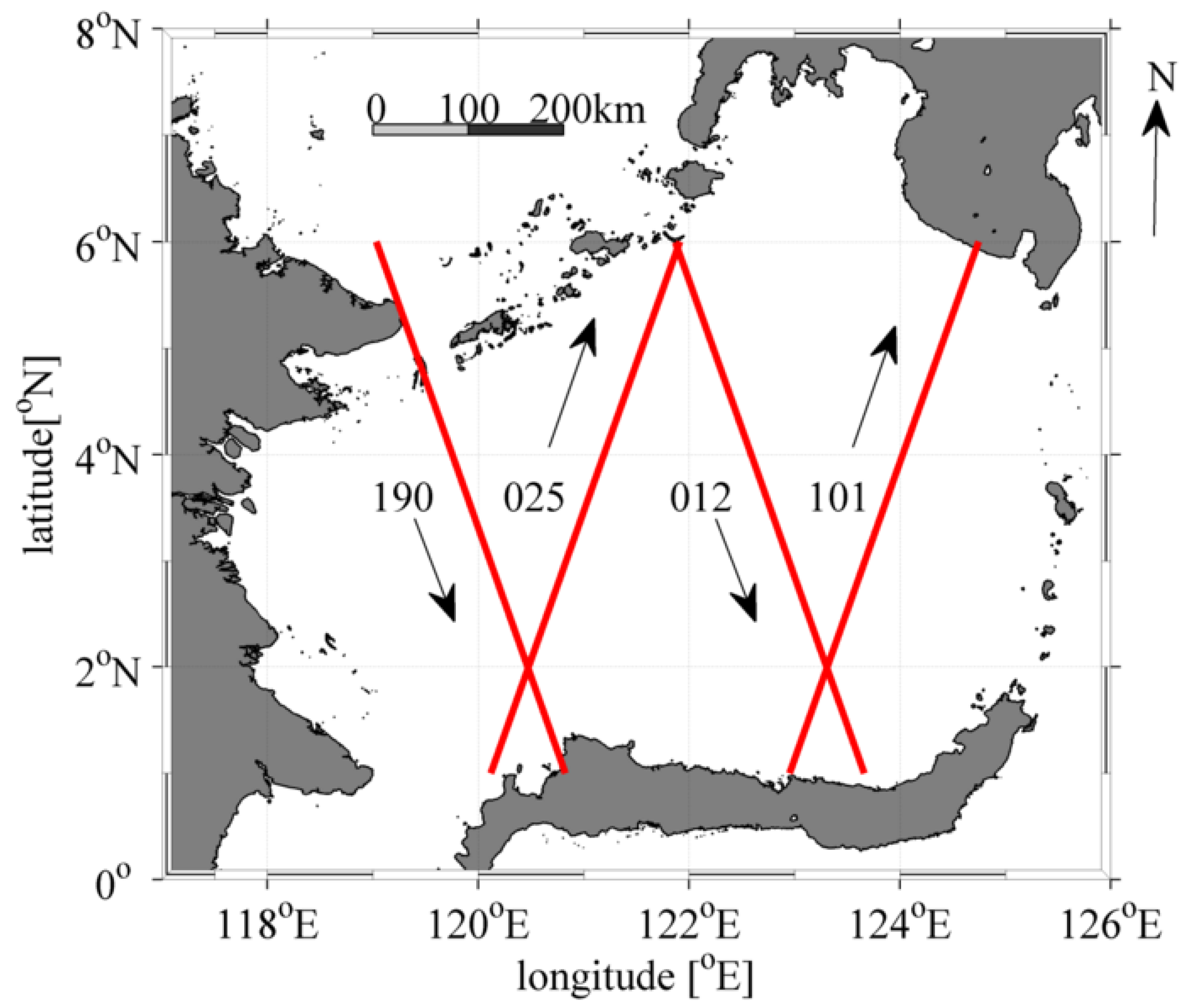
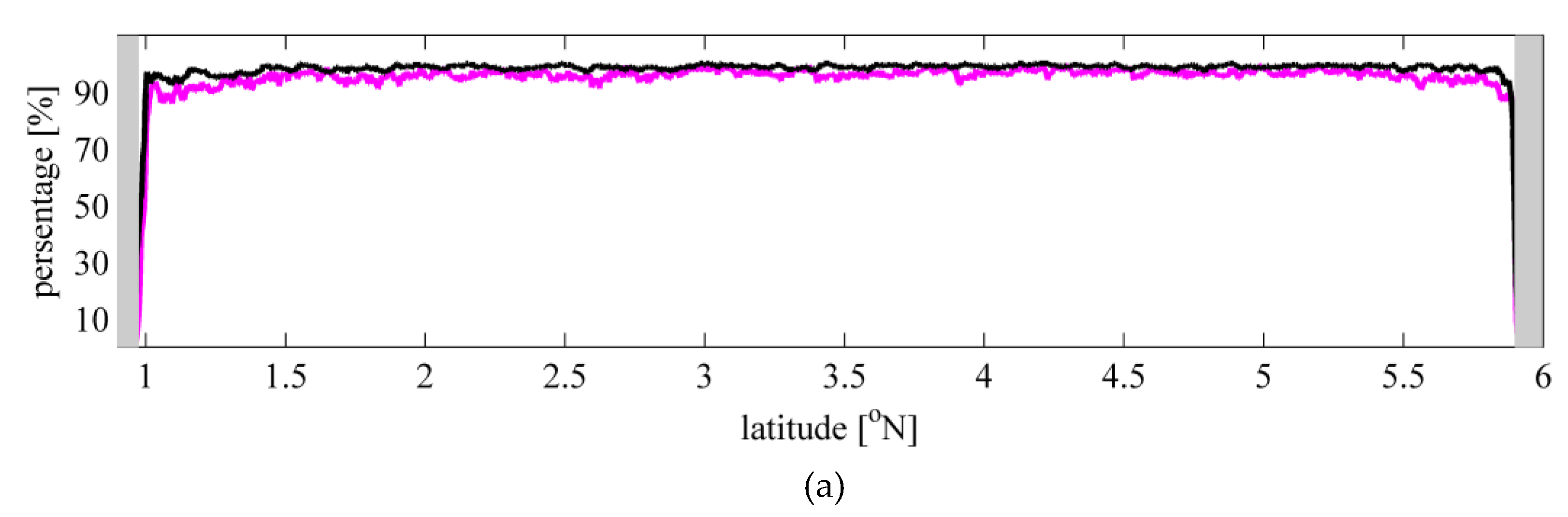
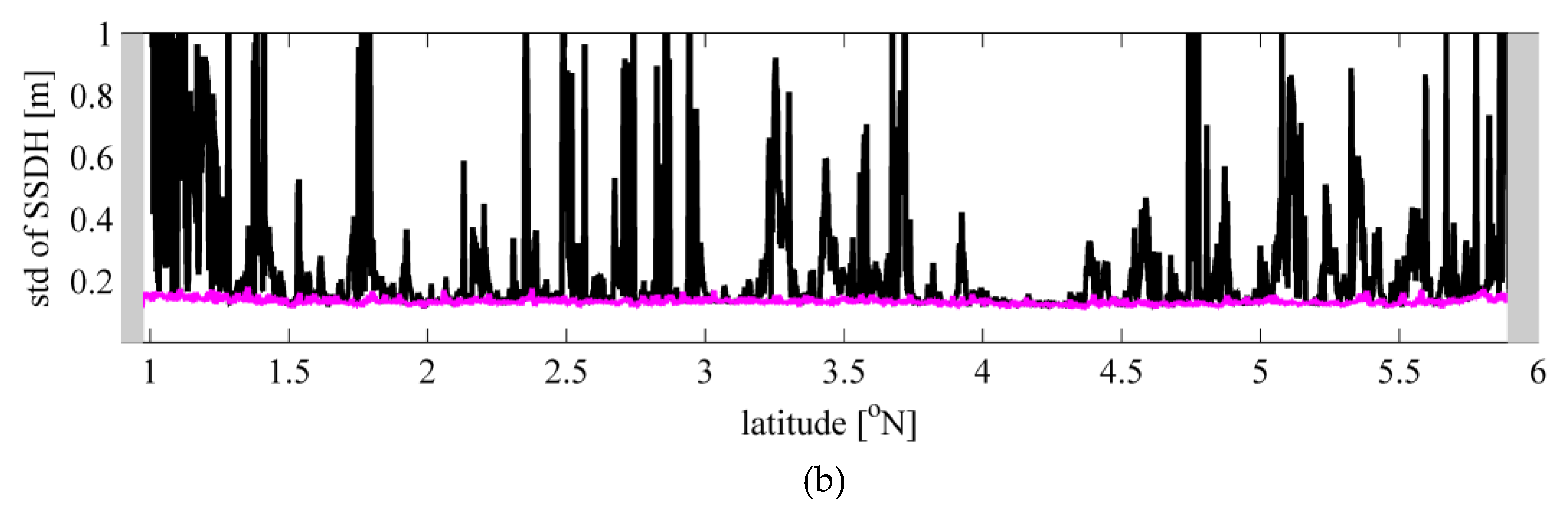
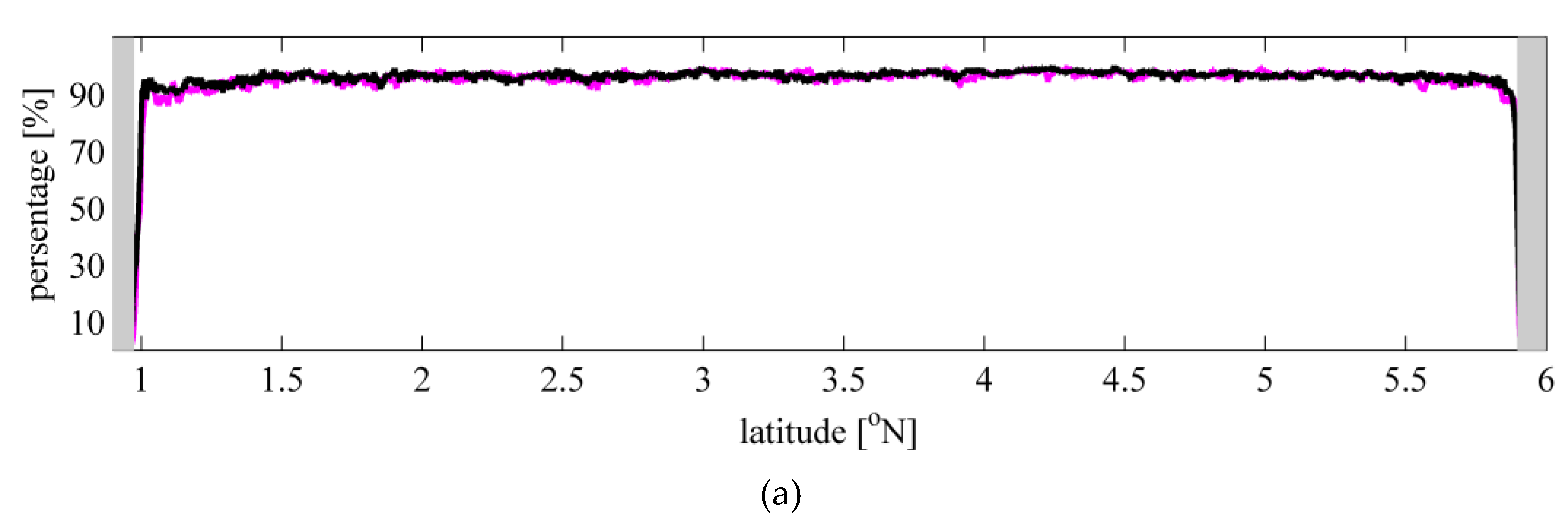
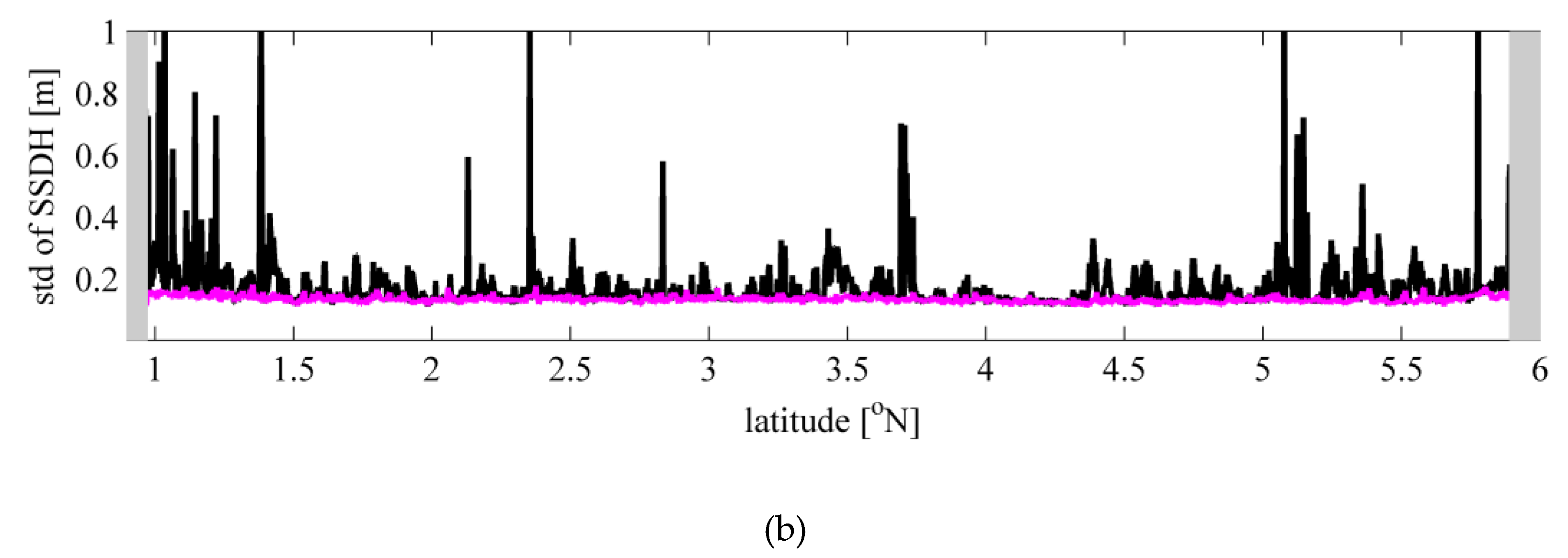
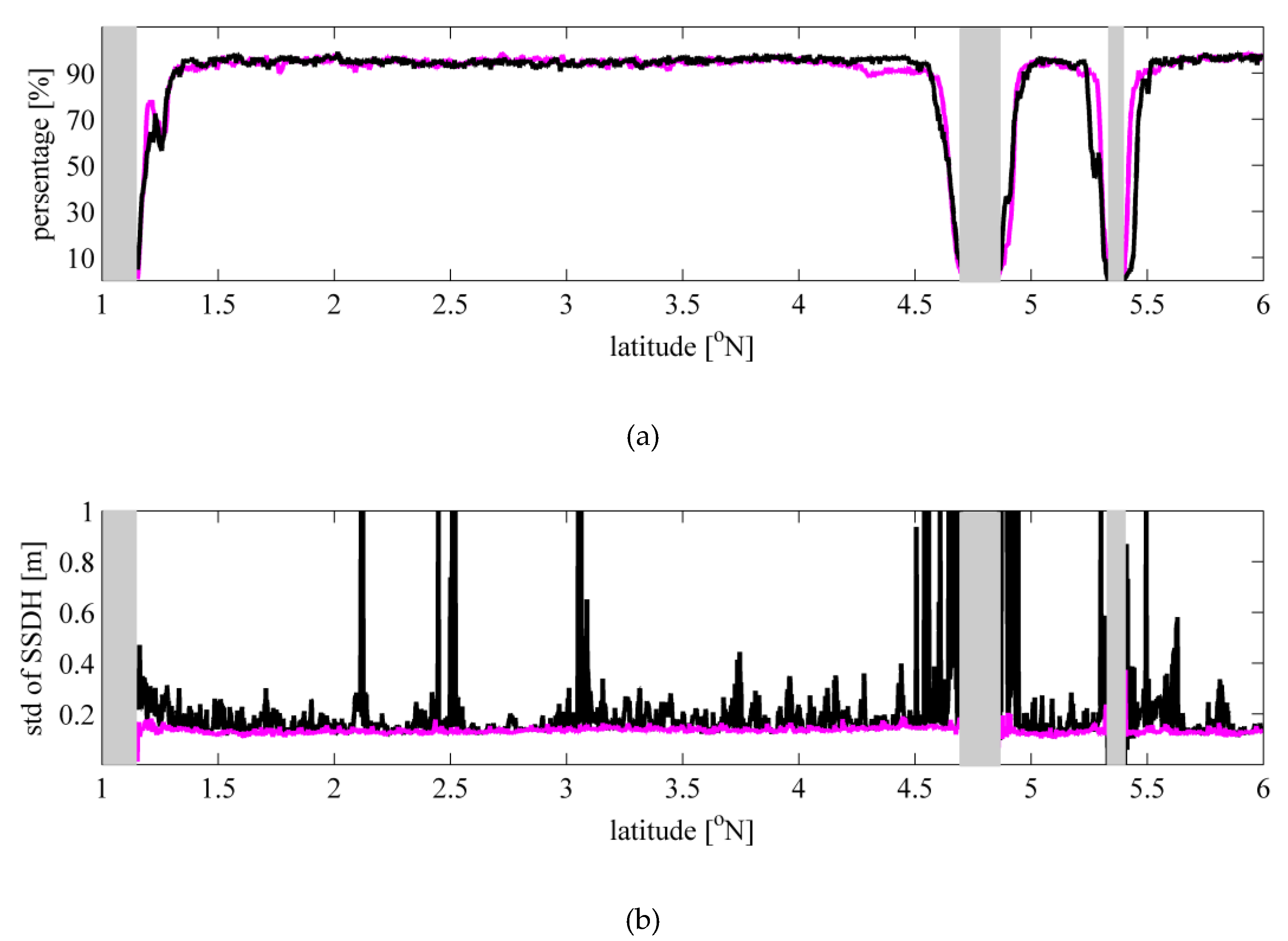
The 20 Hz Jason-2 altimeter data over the Sulawesi Sea of Indonesia was used for validation of our method, as slicks are often observed there. As shown in
Figure 7 and
Figure 8, a data acquisition rate of more than 90% can be guaranteed approximately 5–10 km away from the coast, which is equivalent to that of the ALES data filtered by the conditions listed in
Table 1. Meanwhile, the standard deviation of the SSDH of the present study is much smaller than that of the ALES results, not only in open seas but also in coastal waters. All the statistics in
Table 2 indicates the advantages of the present method, especially because the occurrence number of abnormal SSDH values was 20 times smaller than that of ALES data and 200 times smaller than that of SGDR data.
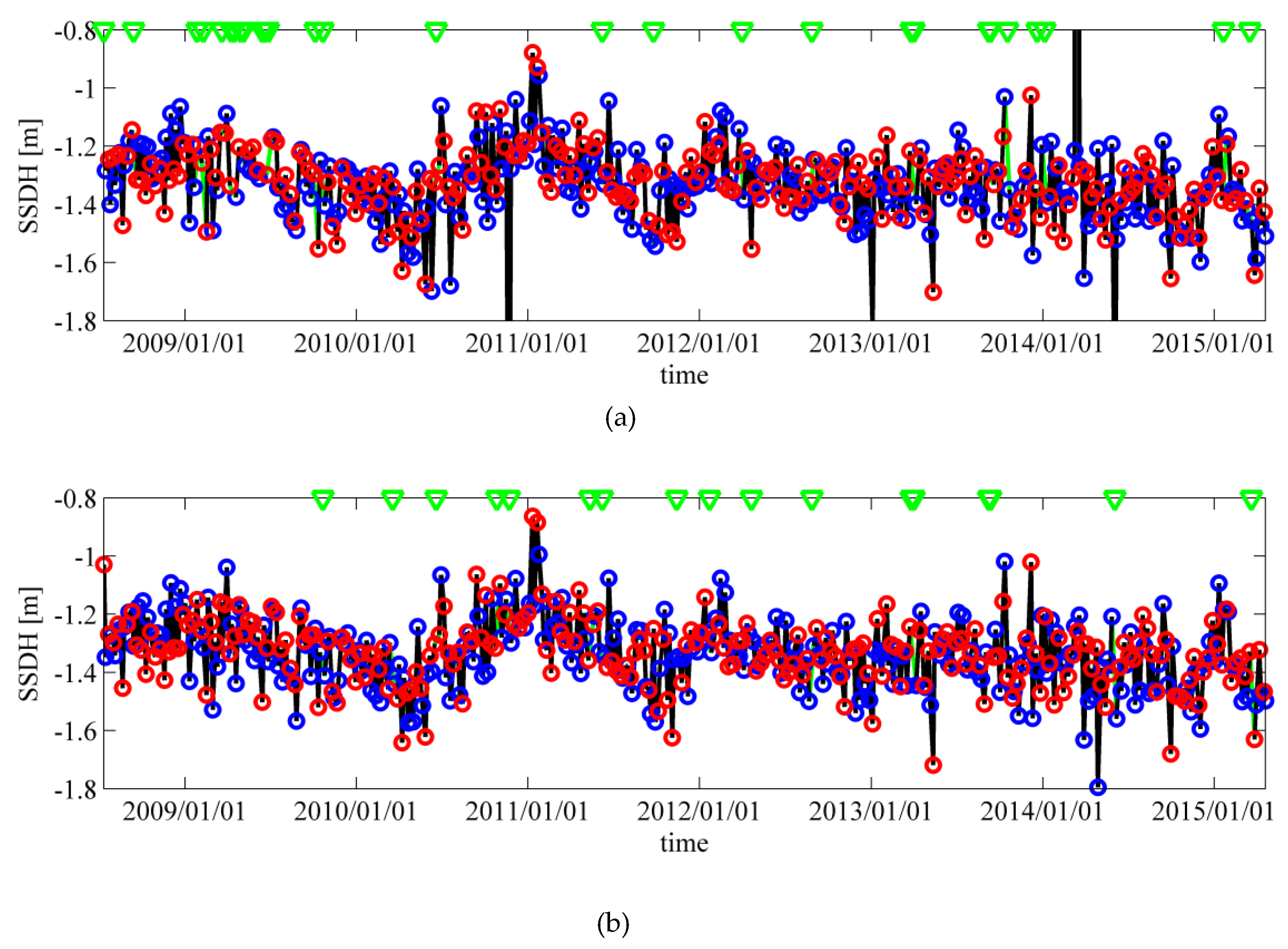
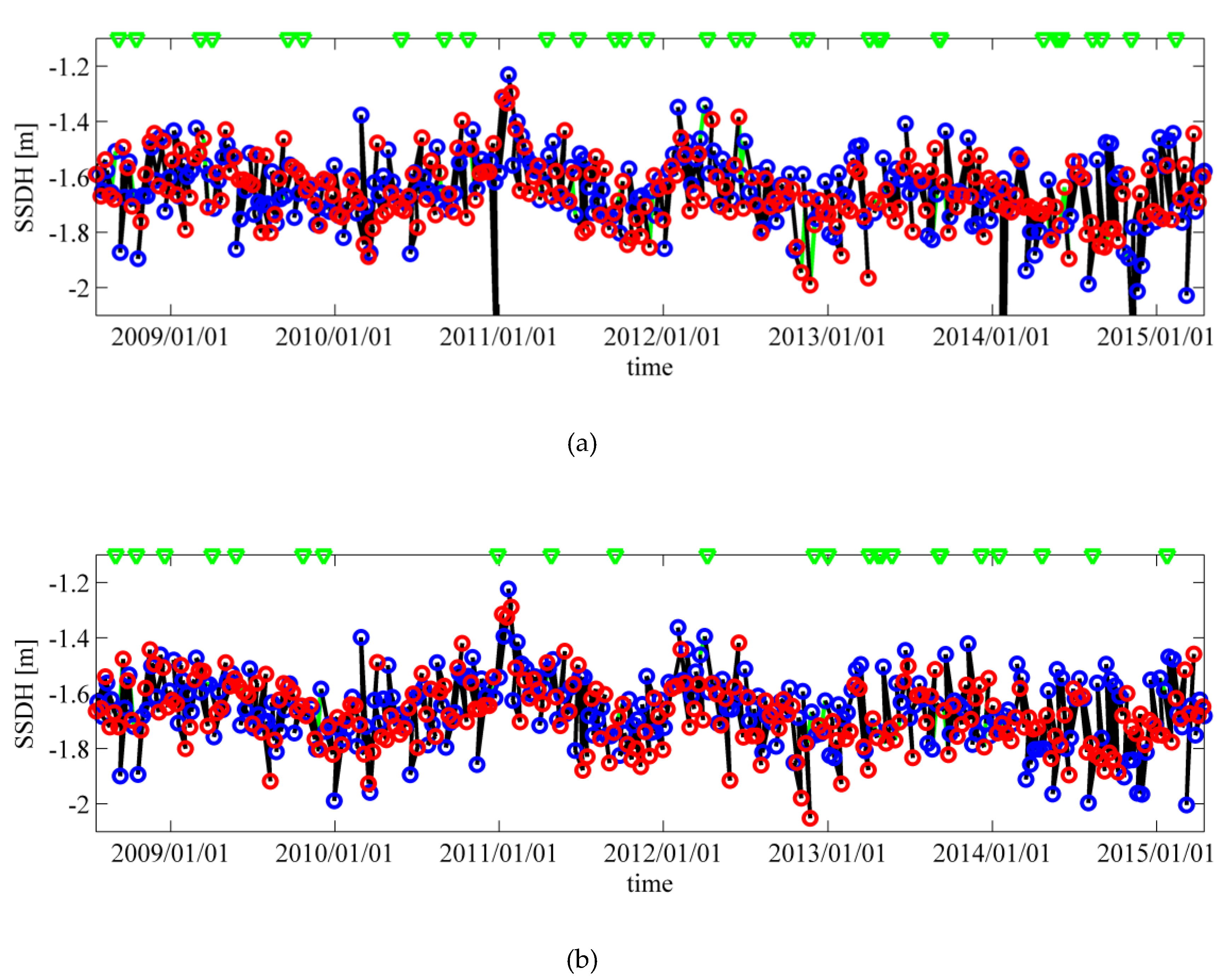
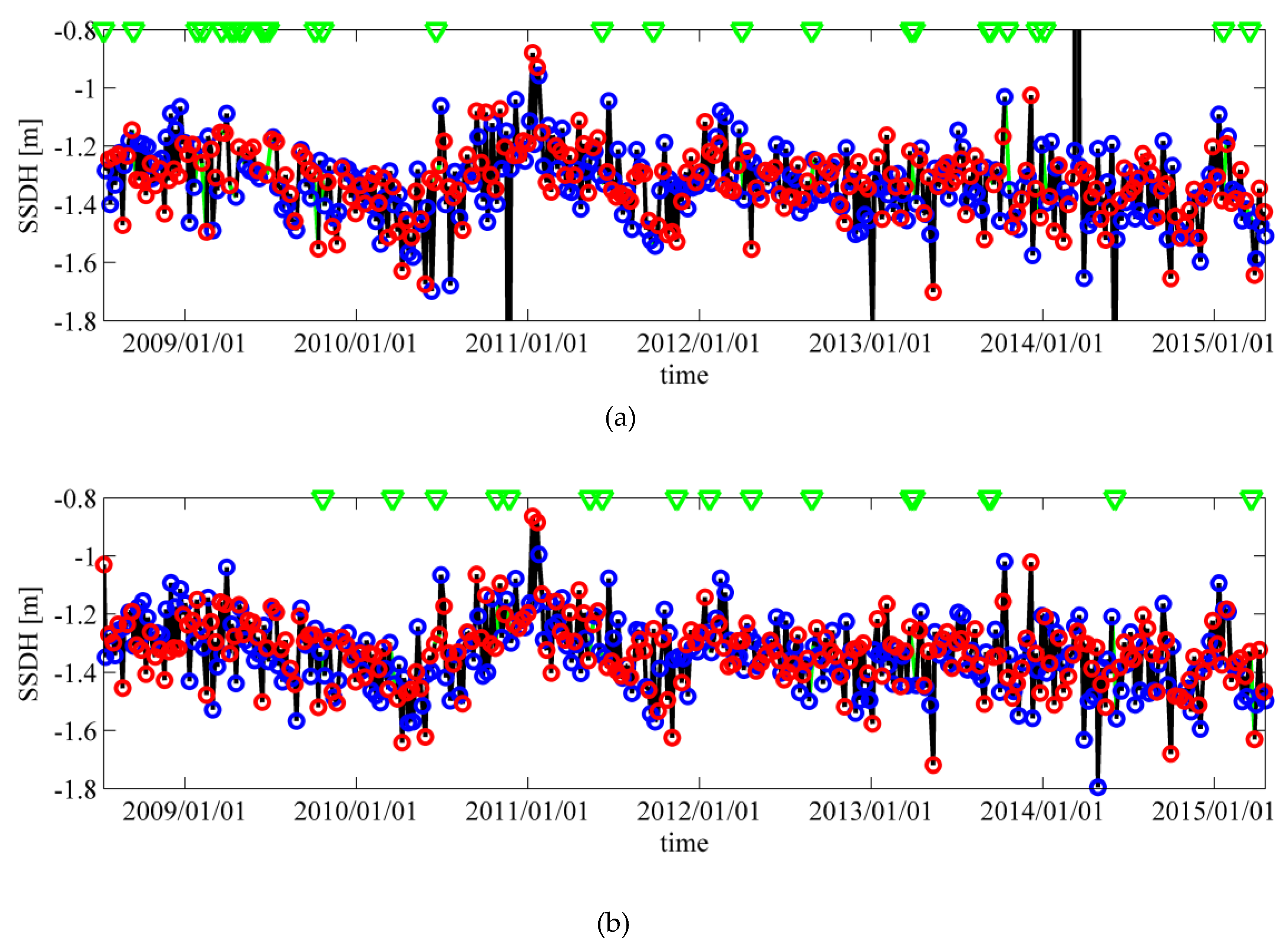
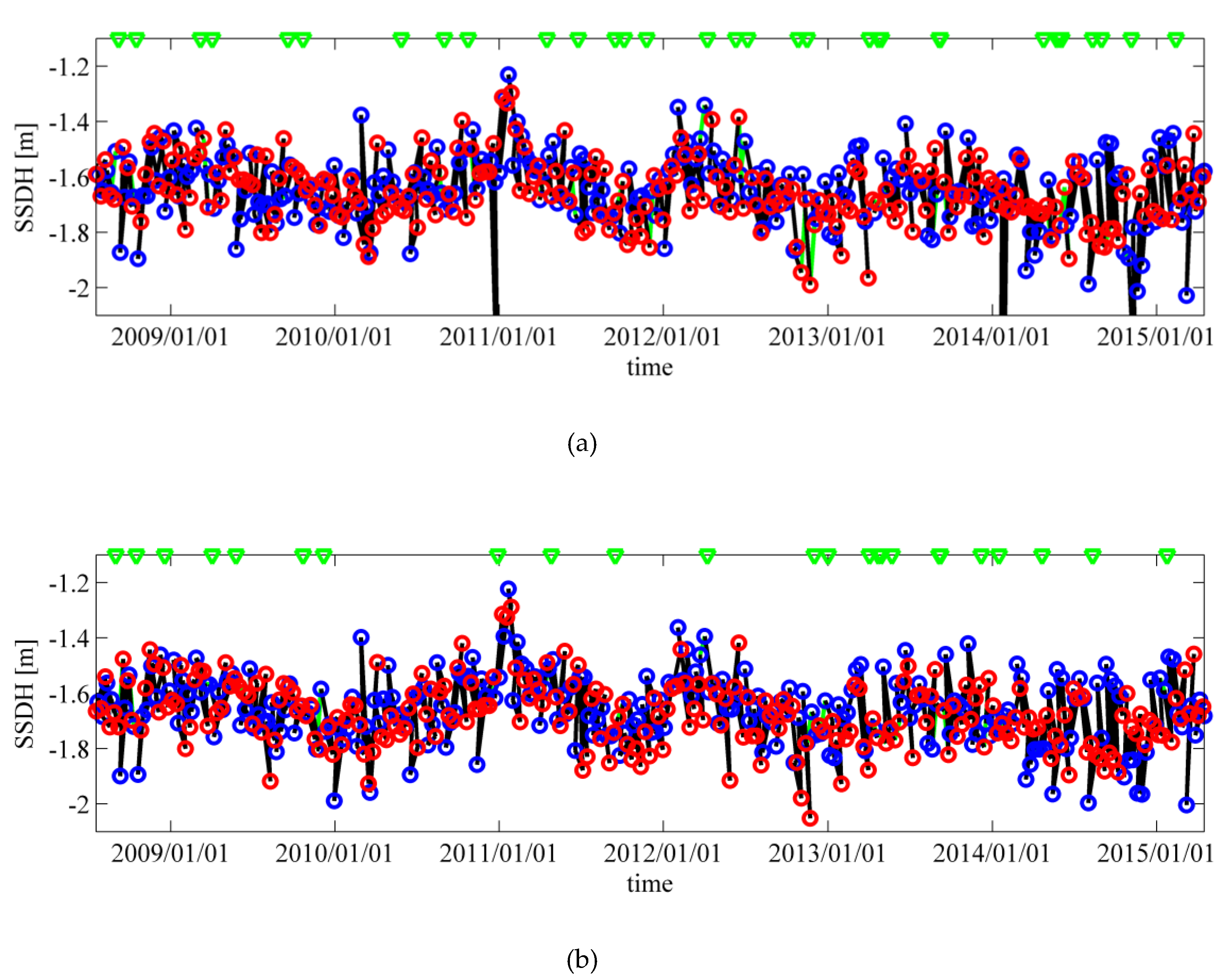
The time series of the SSDH were examined at the two crossover points of two passes (Passes 12 and 101; 190 and 25). Both ALES and the present study show similar smooth, long-term SSDH variations, but several outliers are included in the filtered ALES data. Since the SSDH standard deviation of the filtered ALES data is not significantly large at the crossover points, outliers would be more frequently observed in the ALES data at other points where its SSDH standard deviation is large. Note that the outlier-absent SSDH of the present study would be effective even in coastal areas where the ALES SSDH standard deviation is generally large.
The relationship between the sigma0 and SWH estimations was also examined along Pass 101 (
Figure 11). The data density distributions of both ALES and this study indicate that SWH tends to be smaller when wind speed is low (i.e., sigma0 is large), which agrees with the conditions of the absence of significant swells that is typical in semi-closed seas. However, the ALES data shows significant scattering in a region with low data density. This suggests that the ALES occasionally failed in estimations of SWH or sigma0, probably due to contamination of echoes from slicks in the trailing edge slope.
Finally, dependency of the results on selections of the criteria parameters used in the present study, i.e., the minimum trailing edge length and the threshold value of homogeneous echo intensity, were examined. The minimum trailing edge length is a trade-off between the data acquisition rate and the quality of the data, while the threshold value is a trade-off between the sensitivity to echoes from slicks and that to noises in the trailing edge slope. Although they are practically determined in the present study by testing various values, these parameters could be set differently in other study areas and with different study targets. Further studies are required to generalize these requirements on the parameters.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}