SAR Interferometry for Sinkhole Early Warning and Susceptibility Assessment along the Dead Sea, Israel

 , , , ,
, , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. InSAR Data and Processing
2.2. Monitoring Procedure
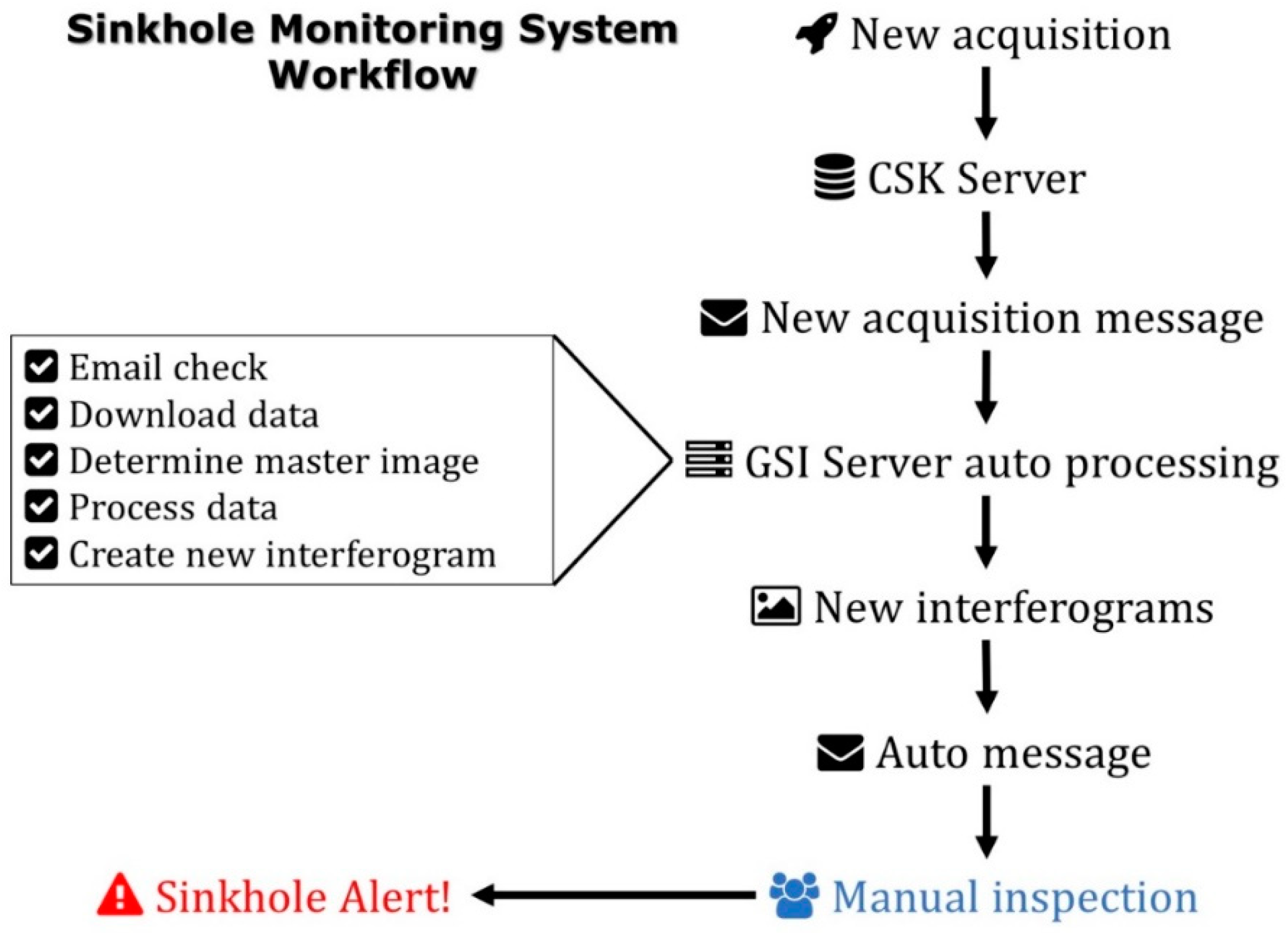
- Upon the acquisition of a new SAR image, an email message is sent by ASI to GSI, typically within less than 12 h from the acquisition.
- The system scans a dedicated mail account for such messages and as soon as one is detected, the new data are downloaded within ~3 additional hours.
- The data are processed into geocoded interferograms of the entire DS region (see below) within ~1 h.
- All interferograms are inspected and compared with previous interferograms and other independent information (e.g., LiDAR-based sinkhole maps, field reports, etc.) to identify new subsiding areas >10 m from any mapped sinkhole. This procedure is completed within two days.
- Upon detection of a new subsiding area, it is flagged, the alert level is set from green (no alert) to yellow (watch alert), and early warning alerts are sent to the relevant authorities and stakeholders.
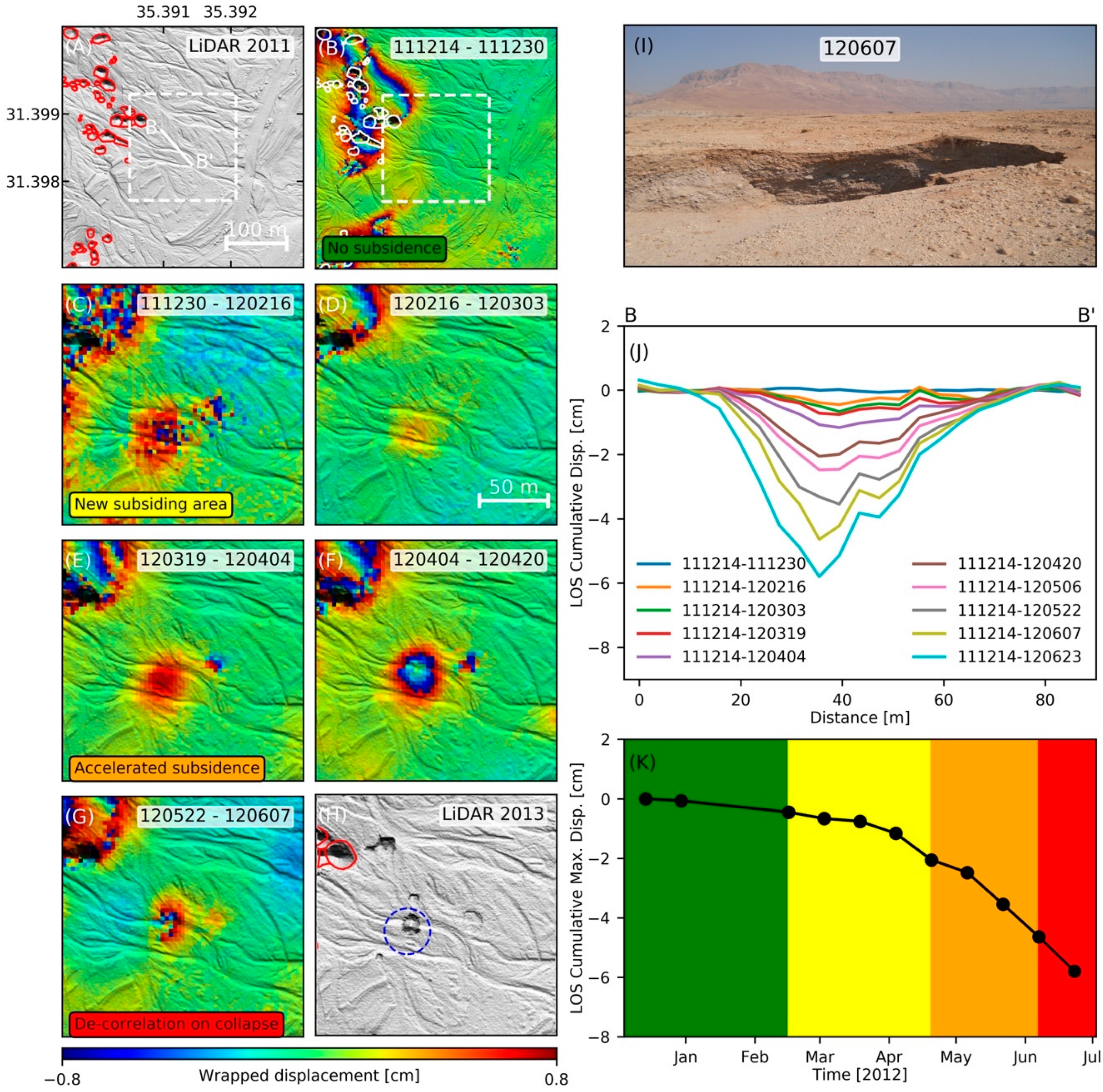
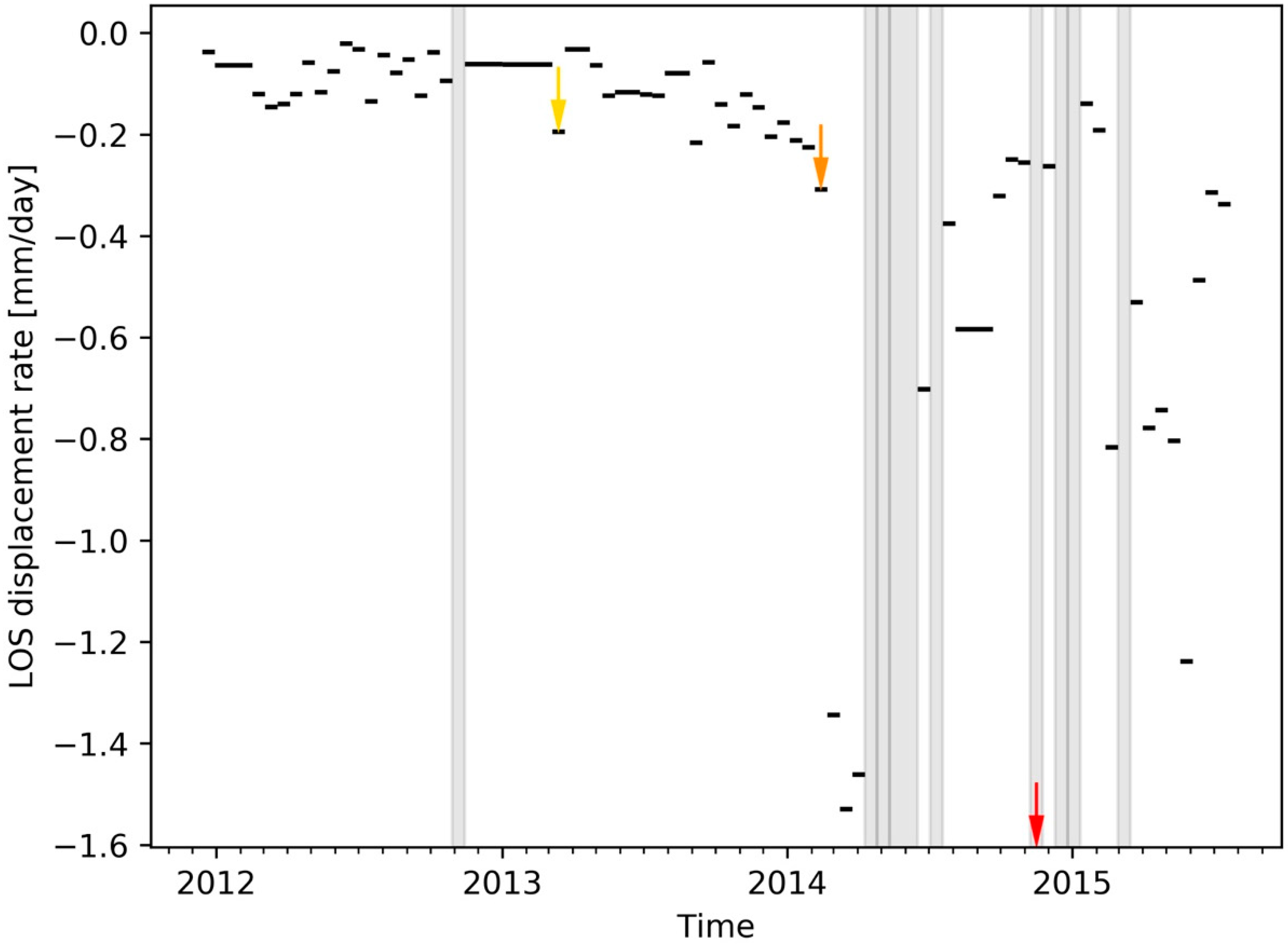
- The time series of the unwrapped individual interferograms of these areas is progressively analyzed to update the alert level (Figure 5). Upon identification of accelerated subsidence at a site (which is not always visible), the alert level is raised to orange (urgent action alert). Identification of de-correlation in all or part of a subsiding area (excluding cases where de-correlation is clearly due to known weather conditions or extremely large perpendicular baselines) is considered as newly formed sinkholes and the alert level is raised to red (open pits).
3. Application of InSAR Measurements for Sinkhole Hazard Mitigation
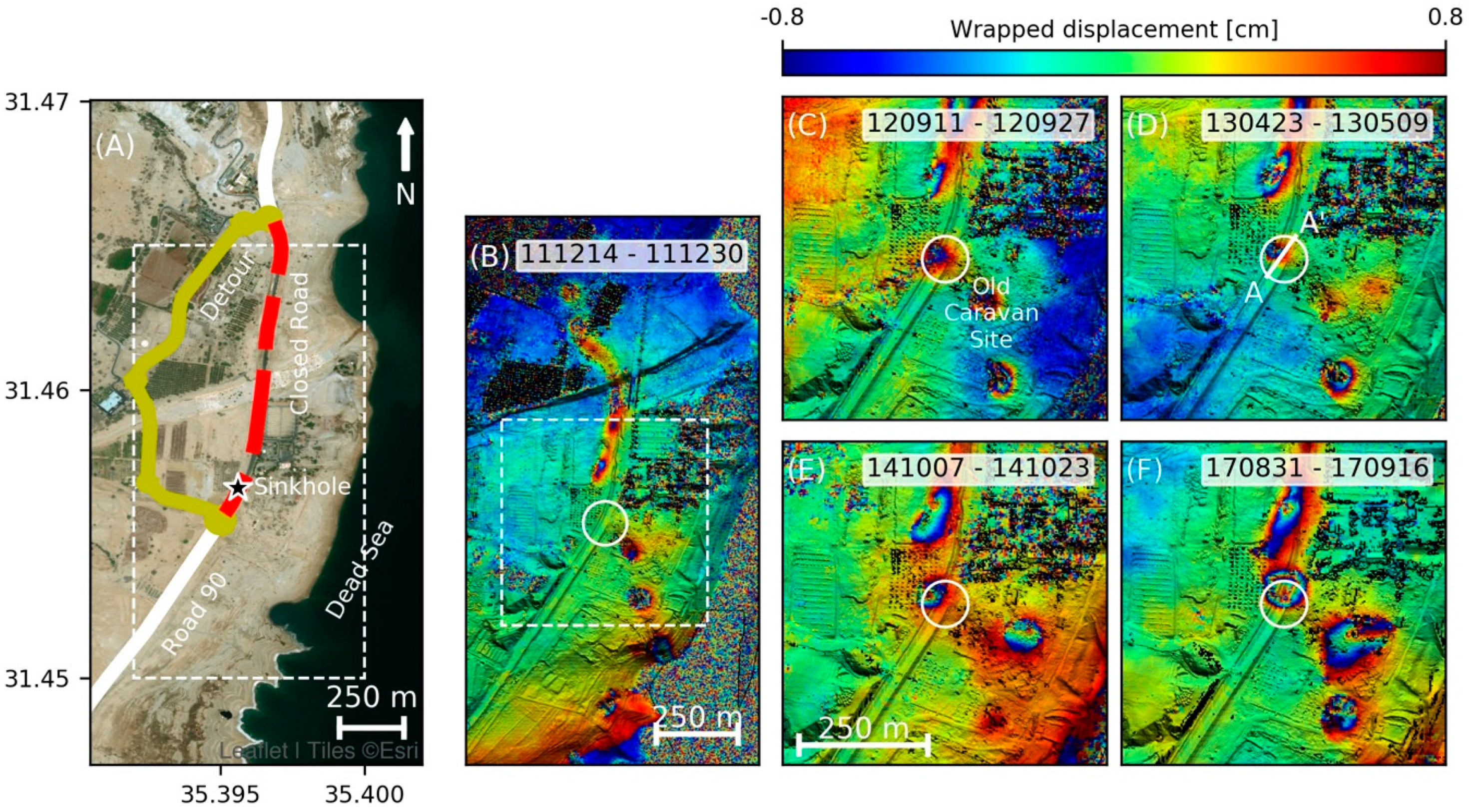
3.1. Early Detection of Sinkhole Precursory Subsidence, Road 90
3.1.1. Site and Hazard
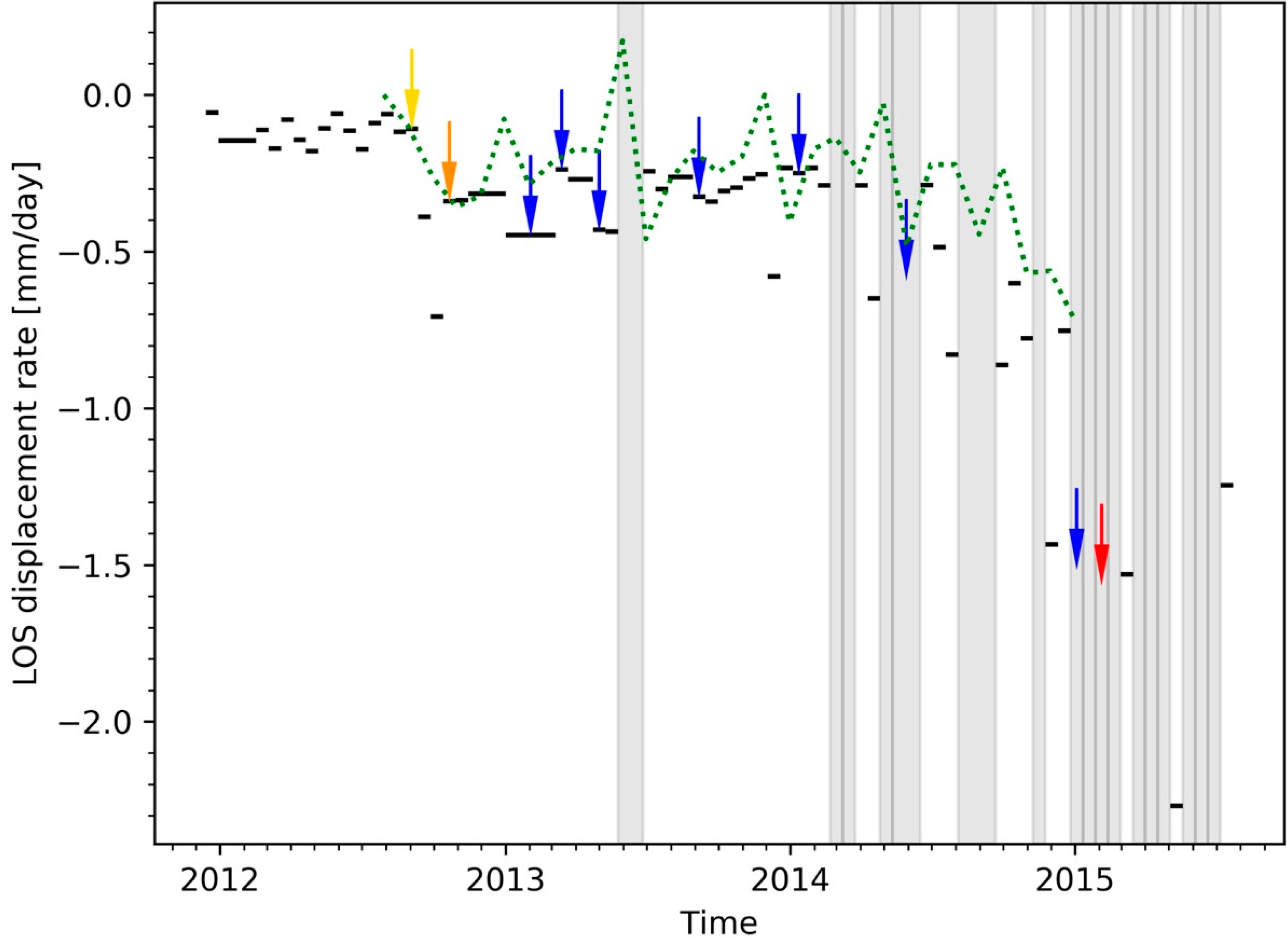
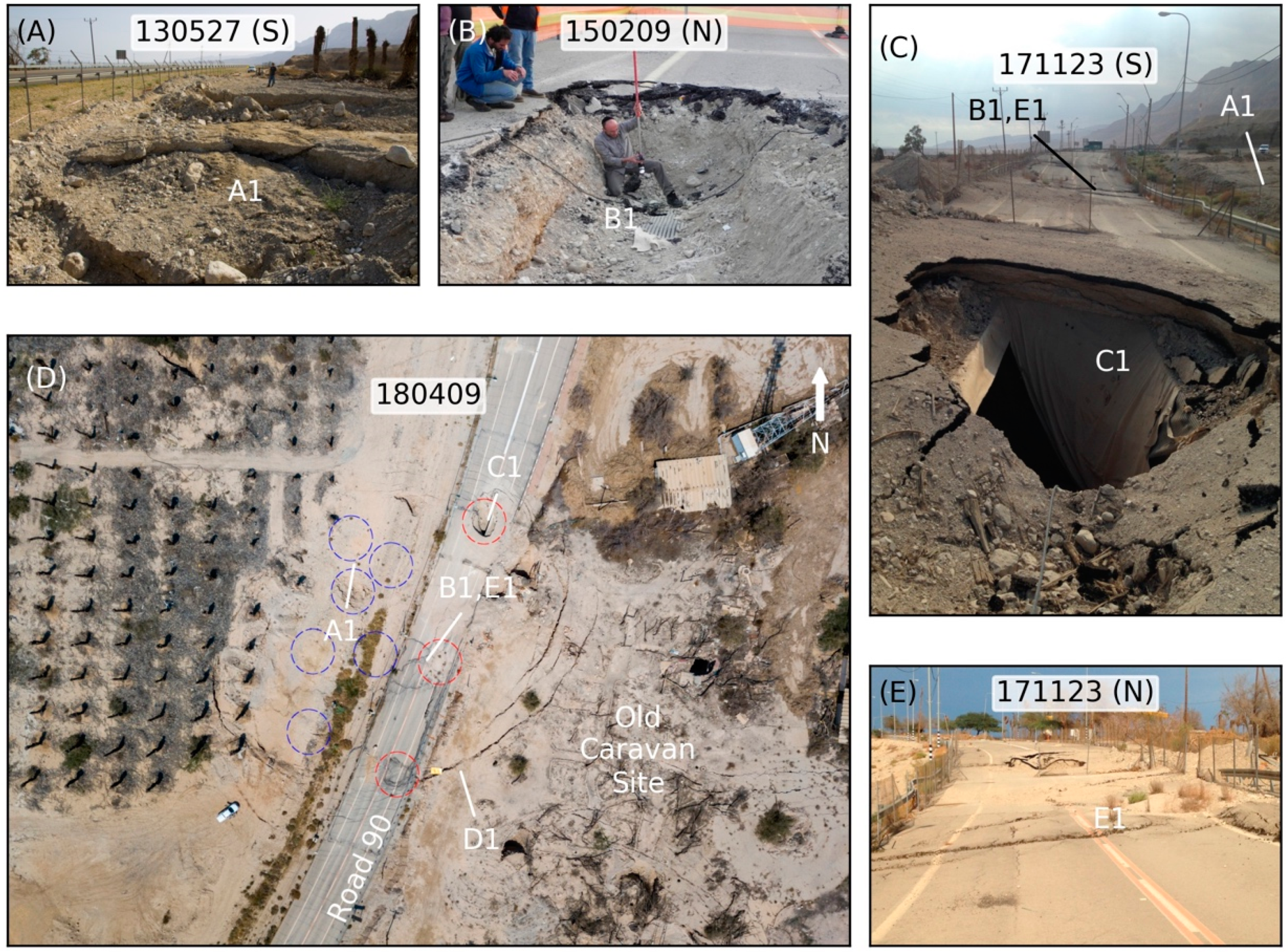
3.1.2. InSAR Monitoring and Early Warning
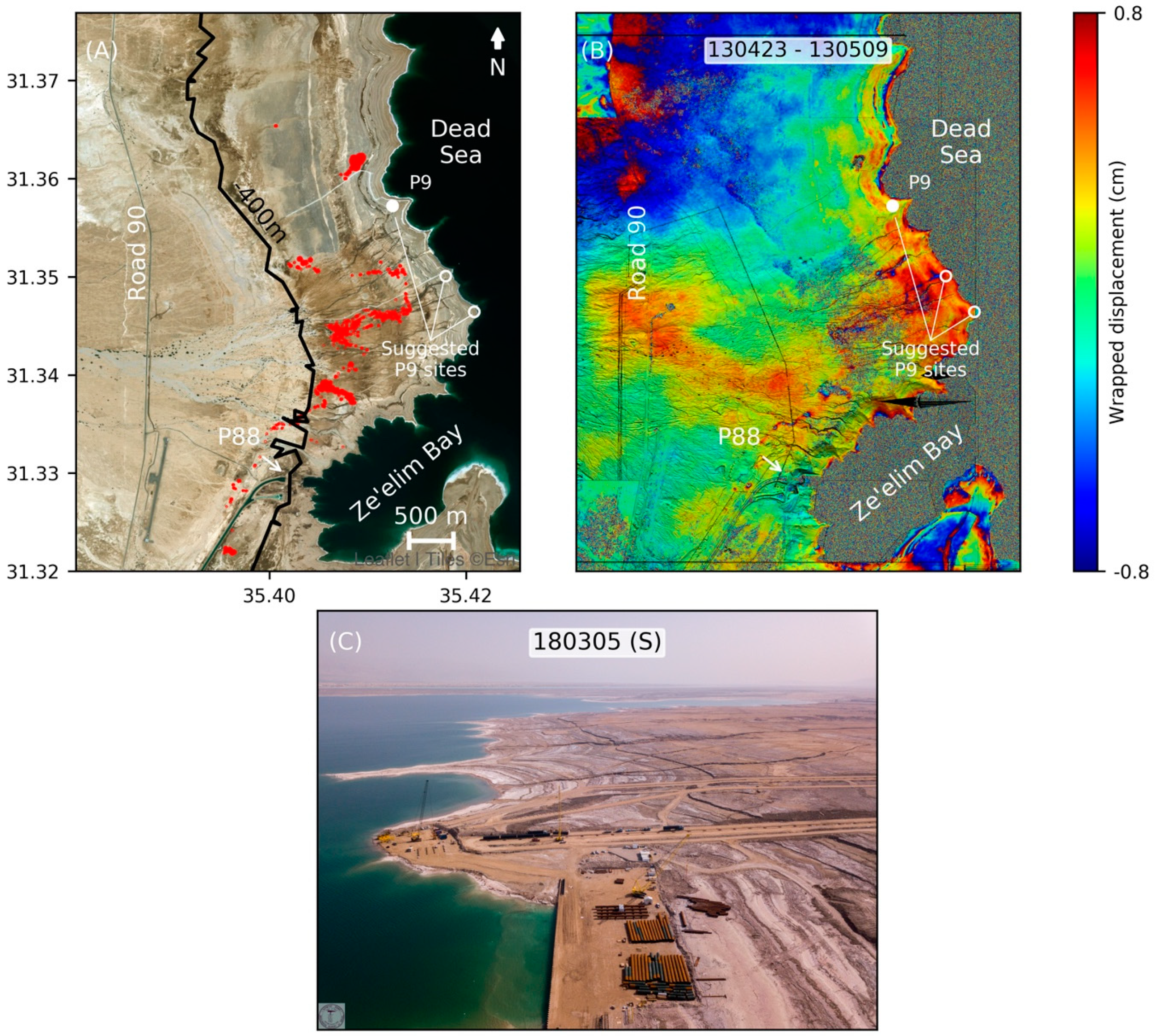
3.2. Infrastructure Risk Reduction, Ze’elim Fan
3.2.1. Site and Hazard
3.2.2. InSAR Measurements for Hazard Evaluation
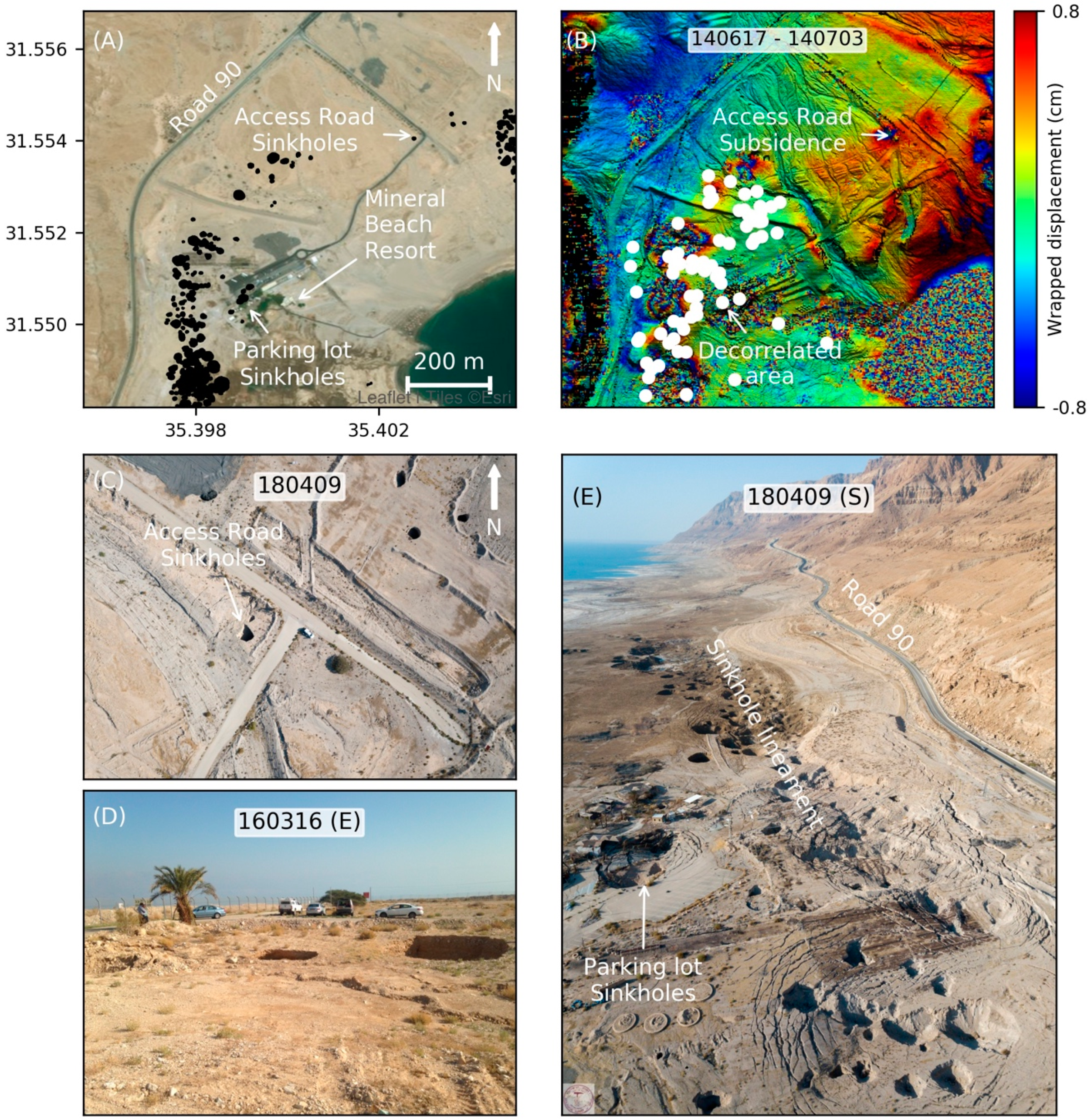
3.3. InSAR and Complementary Monitoring Methods, Mineral Beach
3.3.1. Site and Hazard
3.3.2. InSAR Alerts for Sinkholes along Access Road
3.3.3. Complementary Monitoring Methods in the Vegetated Resort Area
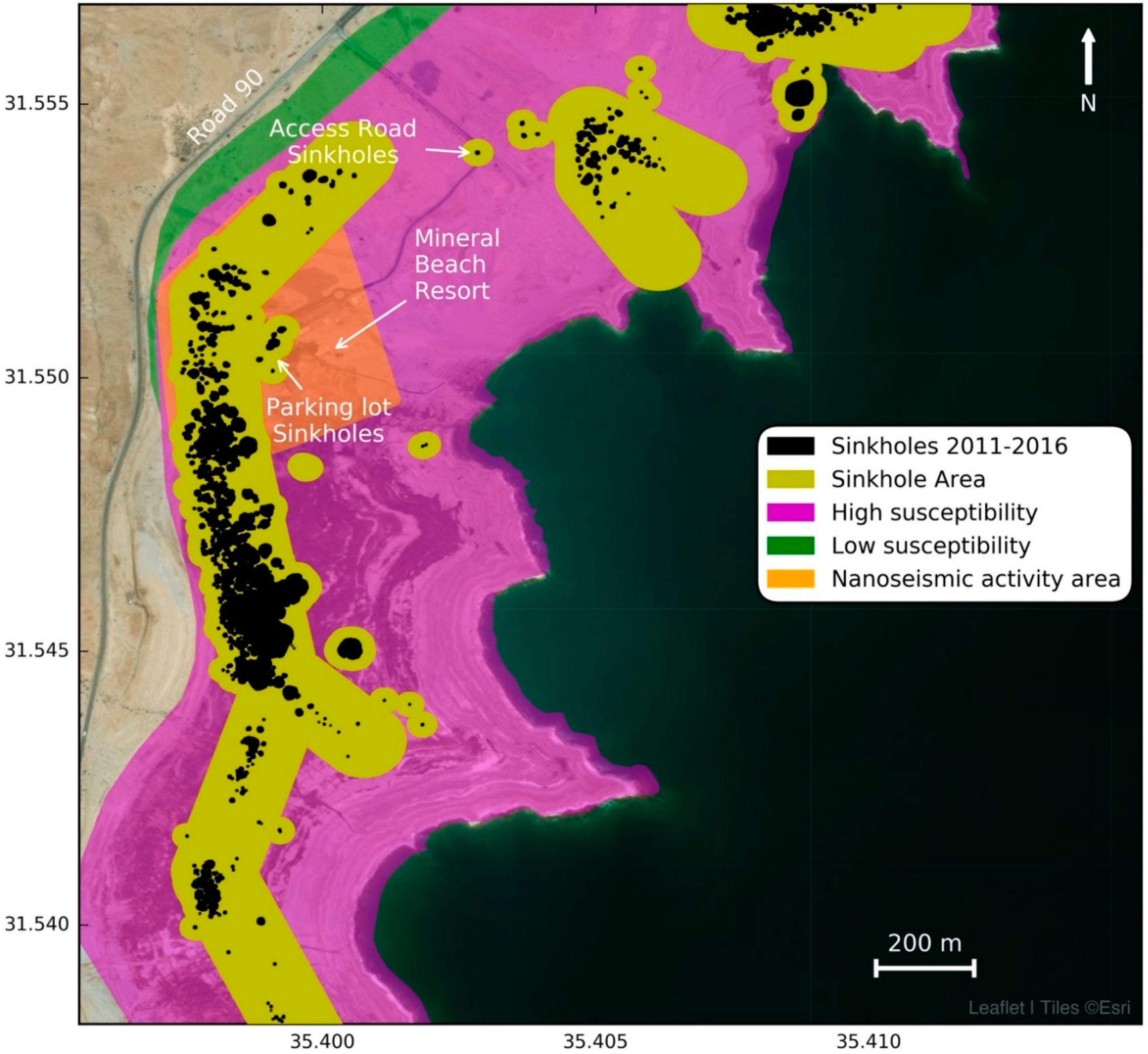
3.4. InSAR and LiDAR Updating of Sinkhole Susceptibility Levels
3.4.1. Sinkhole Susceptibility Maps along the Dead Sea
3.4.2. InSAR Measurements for Updating Sinkhole Susceptibility Levels
4. Discussion
4.1. InSAR Limitations
4.1.1. Loss of Coherence
4.1.2. Availability of Accurate DEM
4.1.3. Technical Limitations
4.1.4. Temporal and Spatial Limitation
4.2. Towards an Automatic Early Warning System
5. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Galloway, D.; Jones, D.R.; Ingebritsen, S.E. Land Subsidence in the United States; U.S. Department of the Interior; U.S. Geological Survey: Reston, VA, USA, 1999; Volume 1182.
- Martinez, J.; Johnson, K.; Neal, J. Sinkholes in Evaporite Rocks. Am. Sci. 1998, 86, 38. [Google Scholar] [CrossRef]
- Theron, A.; Engelbrecht, J. The Role of Earth Observation, with a Focus on SAR Interferometry, for Sinkhole Hazard Assessment. Remote Sens. 2018, 10, 1506. [Google Scholar] [CrossRef]
- Waltham, T.; Bell, F.G.; Culshaw, M. Sinkholes and Subsidence; Karst and Cavernous Rocks in Engineering and Const; Springer: Berlin/Heidelberg, Germany, 2005; ISBN 978-3-540-20725-2. [Google Scholar]
- Parise, M. Rock failures in karst. In Landslides and Engineered Slopes. From the Past to the Future; Cheng, Z., Zhang, J., Li, Z., Wu, F., Ho, K., Eds.; CRC Press: London, UK, 2008; pp. 275–280. ISBN 0780339967. [Google Scholar]
- Gutiérrez, F.; Parise, M.; De Waele, J.; Jourde, H. A review on natural and human-induced geohazards and impacts in karst. Earth-Sci. Rev. 2014, 138, 61–88. [Google Scholar] [CrossRef]
- Paine, J.G.; Buckley, S.M.; Collins, E.W.; Wilson, C.R. Assessing Collapse Risk in Evaporite Sinkhole-prone Areas Using Microgravimetry and Radar Interferometry. J. Environ. Eng. Geophys. 2012, 17, 75–87. [Google Scholar] [CrossRef]
- Nof, R.N. Current Ground Movements in the Dead-Sea Area and Their Implications for Crustal Rheology and Infrastructure Instability: A Synthetic Aperture Radar Interferometry (InSAR) Study. Ph.D. Thesis, Ben-Gurion University of the Negev, Beersheba, Israel, 2012. [Google Scholar]
- Nof, R.N.; Baer, G.; Ziv, A.; Raz, E.; Atzori, S.; Salvi, S. Sinkhole precursors along the Dead Sea, Israel, revealed by SAR interferometry. Geology 2013, 41, 1019–1022. [Google Scholar] [CrossRef]
- Jones, C.E.; Blom, R.G. Bayou Corne, Louisiana, sinkhole: Precursory deformation measured by radar interferometry. Geology 2014, 42, 111–114. [Google Scholar] [CrossRef]
- Intrieri, E.; Gigli, G.; Nocentini, M.; Lombardi, L.; Mugnai, F.; Fidolini, F.; Casagli, N. Sinkhole monitoring and early warning: An experimental and successful GB-InSAR application. Geomorphology 2015, 241, 304–314. [Google Scholar] [CrossRef]
- Baer, G.; Magen, Y.; Nof, R.N.; Raz, E.; Lyakhovsky, V.; Shalev, E. InSAR Measurements and Viscoelastic Modeling of Sinkhole Precursory Subsidence: Implications for Sinkhole Formation, Early Warning, and Sediment Properties. J. Geophys. Res. Earth Surf. 2018, 123, 678–693. [Google Scholar] [CrossRef]
- Frumkin, A.; Raz, E. Collapse and subsidence associated with salt karstification along the Dead Sea. Carbonates Evaporites 2001, 16, 117–130. [Google Scholar] [CrossRef]
- Abelson, M.; Baer, G.; Yechieli, Y. Susceptibility Assessment for Development of Sinkholes along the Western Coast of the Dead Sea—2017 Update; Geological Survey of Israel: Jerusalem, Israel, 2017.
- Yechieli, Y.; Abelson, M.; Bein, A.; Crouvi, O.; Shtivelman, V. Sinkhole “swarms” along the Dead Sea cost: Reflection of disturbance of lake and adjacent groundwater systems. Bull. Geol. Soc. Am. 2006, 118, 1075–1087. [Google Scholar] [CrossRef]
- Yechieli, Y. Fresh-Saline Ground Water Interface in the Western Dead Sea Area. Ground Water 2000, 38, 615–623. [Google Scholar] [CrossRef]
- ESRI Online Map Server. Available online: http://server.arcgisonline.com/arcgis/rest/services/World_Imagery/MapServer/tile/ (accessed on 10 June 2018).
- Abelson, M.; Baer, G.; Shtivelman, V.; Wachs, D.; Raz, E.; Crouvi, O.; Kurzon, I.; Yechieli, Y. Collapse-sinkholes and radar interferometry reveal neotectonics concealed within the Dead Sea basin. Geophys. Res. Lett. 2003, 30, 1545. [Google Scholar] [CrossRef]
- Ezersky, M. The seismic velocities of Dead Sea salt applied to the sinkhole problem. J. Appl. Geophys. 2006, 58, 45–58. [Google Scholar] [CrossRef]
- Baer, G.; Schattner, U.; Wachs, D.; Sandwell, D.; Wdowinski, S.; Frydman, S. The lowest place on Earth is subsiding—An InSAR (interferometric synthetic aperture radar) perspective. Geol. Soc. Am. Bull. 2002, 114, 12–23. [Google Scholar] [CrossRef]
- Arkin, Y.; Gilat, A. Dead Sea sinkholes—An ever-developing hazard. Environ. Geol. 2000, 39, 711–722. [Google Scholar] [CrossRef]
- Avni, Y.; Lensky, N.; Dente, E.; Shviro, M.; Arav, R.; Gavrieli, I.; Yechieli, Y.; Abelson, M.; Lutzky, H.; Filin, S.; et al. Self-accelerated development of salt karst during flash floods along the Dead Sea Coast, Israel. J. Geophys. Res. Earth Surf. 2016, 121, 17–38. [Google Scholar] [CrossRef]
- Shalev, E.; Lyakhovsky, V. Viscoelastic damage modeling of sinkhole formation. J. Struct. Geol. 2012, 42, 163–170. [Google Scholar] [CrossRef]
- Abelson, M.; Yechieli, Y.; Crouvi, O.; Baer, G.; Wachs, D.; Bein, A.; Shtivelman, V. Evolution of the Dead Sea sinkholes. Geol. Soc. Am. Spec. Pap. 2006, 401, 241–253. [Google Scholar] [CrossRef]
- Abelson, M.; Aksinenko, T.; Kurzon, I.; Pinsky, V.; Baer, G.; Nof, R.; Yechieli, Y. Nanoseismicity forecasts sinkhole collapse in the Dead Sea coast years in advance. Geology 2018, 46, 83–86. [Google Scholar] [CrossRef]
- Frumkin, A.; Ezersky, M.; Al-Zoubi, A.; Akkawi, E.; Abueladas, A.-R. The Dead Sea sinkhole hazard: Geophysical assessment of salt dissolution and collapse. Geomorphology 2011, 134, 102–117. [Google Scholar] [CrossRef]
- Wust-Bloch, G.H.; Joswig, M. Pre-collapse identification of sinkholes in unconsolidated media at Dead Sea area by “nanoseismic monitoring” (graphical jackknife location of weak sources by few, low-SNR records). Geophys. J. Int. 2006, 167, 1220–1232. [Google Scholar] [CrossRef]
- Ezersky, M.G.; Eppelbaum, L.V.; Al-Zoubi, A.; Keydar, S.; Abueladas, A.; Akkawi, E.; Medvedev, B. Geophysical prediction and following development sinkholes in two Dead Sea areas, Israel and Jordan. Environ. Earth Sci. 2013, 70, 1463–1478. [Google Scholar] [CrossRef]
- Tachikawa, T.; Hato, M.; Kaku, M.; Iwasaki, A. Characteristics of ASTER GDEM version 2. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 3657–3660. [Google Scholar]
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the Earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Filin, S.; Baruch, A.; Avni, Y.; Marco, S. Sinkhole characterization in the Dead Sea area using airborne laser scanning. Nat. Hazards 2011, 58, 1135–1154. [Google Scholar] [CrossRef]
- GDAL/OGR Contributors GDAL/OGR Geospatial Data Abstraction Software Library, 2018, Open Source Geospatial Foundation. Available online: http://gdal.org (accessed on 10 June 2018).
- Wegmuller, U.; Werner, C.; Strozzi, T. SAR interferometric and differential interferometric processing chain. In Proceedings of the 1998 IEEE International Geoscience and Remote Sensing, Seattle, WA, USA, 6–10 July 1998; Volume 2, pp. 1106–1108. [Google Scholar]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef]
- Atzori, S.; Antonioli, A.; Salvi, S.; Baer, G. InSAR-based modeling and analysis of sinkholes along the Dead Sea coastline. Geophys. Res. Lett. 2015, 42, 8383–8390. [Google Scholar] [CrossRef]
- Ezersky, M.; Legchenko, A.; Camerlynck, C.; Al-Zoubi, A.; Eppelbaum, L.; Keydar, S.; Boucher, M.; Chalikakis, K. The Dead Sea sinkhole hazard—New findings based on a multidisciplinary geophysical study. Z. Geomorphol. Suppl. Issues 2010, 54, 69–90. [Google Scholar] [CrossRef]
- Ezersky, M.; Legchenko, A.; Camerlynck, C.; Al-Zoubi, A. Identification of sinkhole development mechanism based on a combined geophysical study in Nahal Hever South area (Dead Sea coast of Israel). Environ. Geol. 2009, 58, 1123–1141. [Google Scholar] [CrossRef]
- SARVIEWS. Available online: http://sarviews-hazards.alaska.edu/ (accessed on 9 December 2018).
- COMET. Available online: http://comet.nerc.ac.uk/COMET-LiCS-portal/ (accessed on 9 December 2018).
- ARIA. Available online: https://aria.jpl.nasa.gov/ (accessed on 9 December 2018).
- De Luca, C.; Zinno, I.; Manunta, M.; Lanari, R.; Casu, F. Large areas surface deformation analysis through a cloud computing P-SBAS approach for massive processing of DInSAR time series. Remote Sens. Environ. 2017, 202, 3–17. [Google Scholar] [CrossRef]
- Yun, S.-H.; Hudnut, K.; Owen, S.; Webb, F.; Simons, M.; Sacco, P.; Gurrola, E.; Manipon, G.; Liang, C.; Fielding, E.; et al. Rapid Damage Mapping for the 2015 M w 7.8 Gorkha Earthquake Using Synthetic Aperture Radar Data from COSMO–SkyMed and ALOS-2 Satellites. Seismol. Res. Lett. 2015, 86, 1549–1556. [Google Scholar] [CrossRef]
- Milillo, P.; Riel, B.; Minchew, B.; Yun, S.-H.; Simons, M.; Lundgren, P. On the Synergistic Use of SAR Constellations’ Data Exploitation for Earth Science and Natural Hazard Response. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1095–1100. [Google Scholar] [CrossRef]
- Dzurisin, D. A comprehensive approach to monitoring volcano deformation as a window on the eruption cycle. Rev. Geophys. 2003, 41, 1–29. [Google Scholar] [CrossRef]
- Meyer, F.J.; McAlpin, D.B.; Gong, W.; Ajadi, O.; Arko, S.; Webley, P.W.; Dehn, J. Integrating SAR and derived products into operational volcano monitoring and decision support systems. ISPRS J. Photogramm. Remote Sens. 2015, 100, 106–117. [Google Scholar] [CrossRef]
- Shviro, M.; Haviv, I.; Baer, G. High-resolution InSAR constraints on flood-related subsidence and evaporite dissolution along the Dead Sea shores: Interplay between hydrology and rheology. Geomorphology 2017, 293, 53–68. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Schwegmann, C.P.; Kleynhans, W.; Engelbrecht, J.; Mdakane, L.W.; Meyer, R.G.V. Subsidence feature discrimination using deep convolutional neural networks in synthetic aperture radar imagery. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4626–4629. [Google Scholar]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]













© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nof, R.N.; Abelson, M.; Raz, E.; Magen, Y.; Atzori, S.; Salvi, S.; Baer, G. SAR Interferometry for Sinkhole Early Warning and Susceptibility Assessment along the Dead Sea, Israel. Remote Sens. 2019, 11, 89. https://doi.org/10.3390/rs11010089
Nof RN, Abelson M, Raz E, Magen Y, Atzori S, Salvi S, Baer G. SAR Interferometry for Sinkhole Early Warning and Susceptibility Assessment along the Dead Sea, Israel. Remote Sensing. 2019; 11(1):89. https://doi.org/10.3390/rs11010089
Chicago/Turabian StyleNof, Ran N., Meir Abelson, Eli Raz, Yochay Magen, Simone Atzori, Stefano Salvi, and Gidon Baer. 2019. "SAR Interferometry for Sinkhole Early Warning and Susceptibility Assessment along the Dead Sea, Israel" Remote Sensing 11, no. 1: 89. https://doi.org/10.3390/rs11010089
APA StyleNof, R. N., Abelson, M., Raz, E., Magen, Y., Atzori, S., Salvi, S., & Baer, G. (2019). SAR Interferometry for Sinkhole Early Warning and Susceptibility Assessment along the Dead Sea, Israel. Remote Sensing, 11(1), 89. https://doi.org/10.3390/rs11010089