1. Introduction
Since prehistoric times, date palm trees have been one of the most commonly cultivated trees in the world, due to their significant societal, commercial, and environmental importance [
1]. They are regarded as a symbol of life because they can endure high temperatures, water scarcity, and soil salinity. The palm tree is mostly located in West Asia and North Africa, and it is generally grown in arid and semi-arid environments [
2]. The date palm tree industry in the United Arab Emirates (UAE) has exponentially increased over the years; the number of date palm trees planted was estimated to be over 40 million in 2010 [
3]. Proper knowledge of the distribution, number, and health of date palm trees is essential for their monitoring, irrigation, yield estimation, and the determination of their effects on water resources and climate conditions.
Remote sensing technologies provide a cost-effective and feasible means of vegetation mapping and monitoring, compared to field-based studies [
4,
5]. Considering the growing availability of very-high-spatial-resolution (VHSR) remote sensing data from various platforms and sensors, a broad spectrum of research has adopted geographic object-based image analysis (GEOBIA) as a successful classification approach to map various vegetation species, such as oil palm trees [
6,
7], mangrove trees [
8,
9], rubber plantations [
10], and olives [
11,
12]. In fact, GEOBIA has extensively been used in the literature as a fundamental approach for feature extraction from VHSR images, due to its advantages over the traditional per-pixel classifiers [
13,
14,
15]. While pixel-based classification methods only consider the spectral properties of individual pixels, GEOBIA enables the recognition of multiscale objects from a single image or across several images, and makes the best use of integration between spectral, spatial, textural, thermal, and backscattering values, vector data, and contextual information to accurately extract natural and human-made features [
16,
17,
18,
19]. However, GEOBIA performance might be affected by the image segmentation quality, the selection of the most relevant features, the selection of the representative training samples, and the classification method [
20].
The generic objective of the current study was to accurately map date palm trees from VHSR aerial images using GEOBIA. To effectively achieve the major objective of this research, this study attempted to (a) integrate an F1-score accuracy measure with the Taguchi statistical technique to find the optimal combination of multiresolution segmentation (MRS) parameters for date palm mapping; (b) apply ant colony optimization (ACO) for the GEOBIA feature selection to find the most relevant features from an aerial image and compare its performance with various feature-selection techniques; (c) apply a decision tree (DT) rule-based classification scheme and investigate the transferability of the developed model in detecting date palm trees; and (d) compare the performance of the rule-based classification in the proposed method with supervised GEOBIA classification methods, namely random forest (RF), support vector machine (SVM), and k-nearest neighbor (k-NN).
Background
The general framework of GEOBIA consists of two main steps: (1) image segmentation to produce homogenous non-intersecting objects from the image-pixel level, and (2) classification of the generated objects [
21]. One of the most popular image segmentation algorithms is MRS. MRS is controlled by three user-defined parameters: (a) scale, (b) shape/color weight, and (c) compactness/smoothness weight. The size and the shape of the created image objects are critically dependent on the combinations of these parameters [
16,
22]. Therefore, changing these combinations using a trial-and-error approach can be a very subjective and time-consuming process, leading to various choices of delineating the features of interest that may not produce meaningful segments [
23,
24]. Owing to the fact that attaining high classification accuracy is vastly reliant on image segmentation quality, implementing an optimization technique to find the optimal combinations of these parameters is important to reduce the time and effort required to obtain image segments and ensure adequate delineation of the objects of interest to produce promising results [
16,
25,
26]. Various methods can be used for the evaluation of segmentation quality, including (a) visual assessment, (b) supervised methods (empirical discrepancy method), (c) unsupervised methods (empirical goodness method), and (d) system/application-level methods [
27].
In a visual assessment, various segmentation outputs are compared with one another, and MRS parameters that closely resemble real-world objects are selected. This method can be extremely subjective and time-consuming, because imaged objects from various scales are interpreted visually [
28]. In the supervised evaluation method, segmentation quality is assessed by measuring the discrepancy between ground truth samples (reference objects) and corresponding image segments from segmentation outputs. One of the shortcomings of this technique is that it requires the manual preparation of reference objects, and is thus laborious and time-consuming, especially when image segmentations from large images are assessed [
16,
27].
In contrast to supervised evaluation methods, unsupervised methods allow the evaluation of image segmentation performance, scoring, and ranking of multiple image segmentations, and the selection of optimum MRS through the use of statistical quality measures instead of reference objects [
28,
29,
30]. Espindola et al. [
31] proposed the use of unsupervised global quality scores (GSs), which act as a quality measure of image segmentation by maximizing intrasegment homogeneity and heterogeneity. Espindola et al.’s GS function is expressed as the combination of normalized spatial autocorrelation (Global Moran’s Index (MI)) and normalized weighted variance [
31]. This function may also be used to evaluate local segmentation quality since Moran’s index, and weighted variance can be calculated for individual objects [
28]. Johnson et al. [
30] proposed an overall goodness (OG) metric that combines under- and over-segmentation metrics by using the F1-score with an adjustable weighting parameter to allow for the identification of multiscale segmentation parameters. Grybas et al. [
25] compared three unsupervised image segmentation optimization techniques, including Espindola’s GS, Johnson’s OG, and local variance. The study concluded that the local variance method was the least successful, while GS and OG produced similar results regardless of the differences in their approaches. These unsupervised quality evaluation methods have been used in different applications as image segmentation quality measures to statistically judge and rank all MRS-examined scales, and select the optimum scale value(s) [
28,
30,
32,
33,
34]. The vast majority of unsupervised quality measures focus on optimizing the scale parameters only, and not much attention has been paid to finding the optimum combination of MRS parameters [
35,
36]. However, the synergy of the robust Taguchi statistical technique and the unsupervised Espindola GS function were successfully used to find the optimum combination of MRS parameters in various applications [
16,
18,
35,
36,
37,
38,
39]. Finally, the system/application-level method is made from a land-cover mapping perspective. In this method, the quality of segmentation is evaluated through the classification accuracy assessment. This concept is based on the fact that high classification accuracy implies high segmentation quality [
40,
41].
Despite the advantages of GEOBIA in enabling the utilization of large numbers of spectral, textural, geometrical, and contextual features in the analysis, using all of these features in the classification process may consequently increase the processing time and degrade classification accuracy [
42]. Moreover, overfitting might be encountered, and the complexity of the model is increased. Therefore, the selection of relevant features is a key step in any image analysis procedure [
43]. Recent studies have successfully applied a variety of feature-selection approaches with GEOBIA, including RF [
34,
44], SVM with recursive feature elimination [
45], correlation-based feature selection (CFS) [
46], and chi-square [
47]. Recently, only a few studies have integrated the metaheuristic optimization technique with the GEOBIA framework, such as particle swarm optimization (PSO) [
42] and ACO [
13,
17]. Sameen et al. [
17] integrated ACO to select the most relevant features to classify LIDAR data using GEOBIA. ACO provides the highest accuracy when compared to the results of the RF, SVM, and chi-square feature-selection techniques applied to the k-nearest neighbor classifier. Ridha et al. [
13] compared the RF, CFS, and ACO techniques to improve the identification of shallow and deep-seated landslide types and pointed out that CFC, followed by ACO, provided the highest accuracy for distinguishing between landslide types.
The remainder of this paper is organized as follows: in
Section 2, the proposed method, study area, and data sets are demonstrated briefly. This section also describes image segmentation evaluation methods and optimization techniques employed in this study, specifically ant colony optimization for feature selection and rule-based classification based on DT. The results of the experiments and the accuracy assessments are reported in
Section 3. In
Section 4, the interpretation of the results and the effectiveness of the proposed method are discussed. Finally,
Section 5 presents the conclusions.
4. Discussion
Feature extraction from very-high-spatial-resolution images with a limited number of spectral bands can be challenging, due to the heterogeneity and spectral similarity between various land-use types and land-cover classes. Thus, GEOBIA is widely used to extract features from VHSR images because it allows for the differentiation of various classes by employing spectral, spatial, textural, and geometrical features in the classification process. Image segmentation is the initial and fundamental step in GEOBIA; poor quality of image segmentation often results in low classification accuracy. Gao et al. [
26] investigated the effects of selecting the optimum segmentation result on classification accuracy by evaluating nine image segmentations with different MRS parameter settings from Landsat imagery. They selected the optimum segmentation using the OF, classified the nine segmentations, and computed the accuracy assessments for the nine classification results. They concluded that segmentation with the highest OF values resulted in the highest classification accuracies. Thus, MRS parameter optimization should be conducted before image analysis to ensure proper input for image classification. Smith [
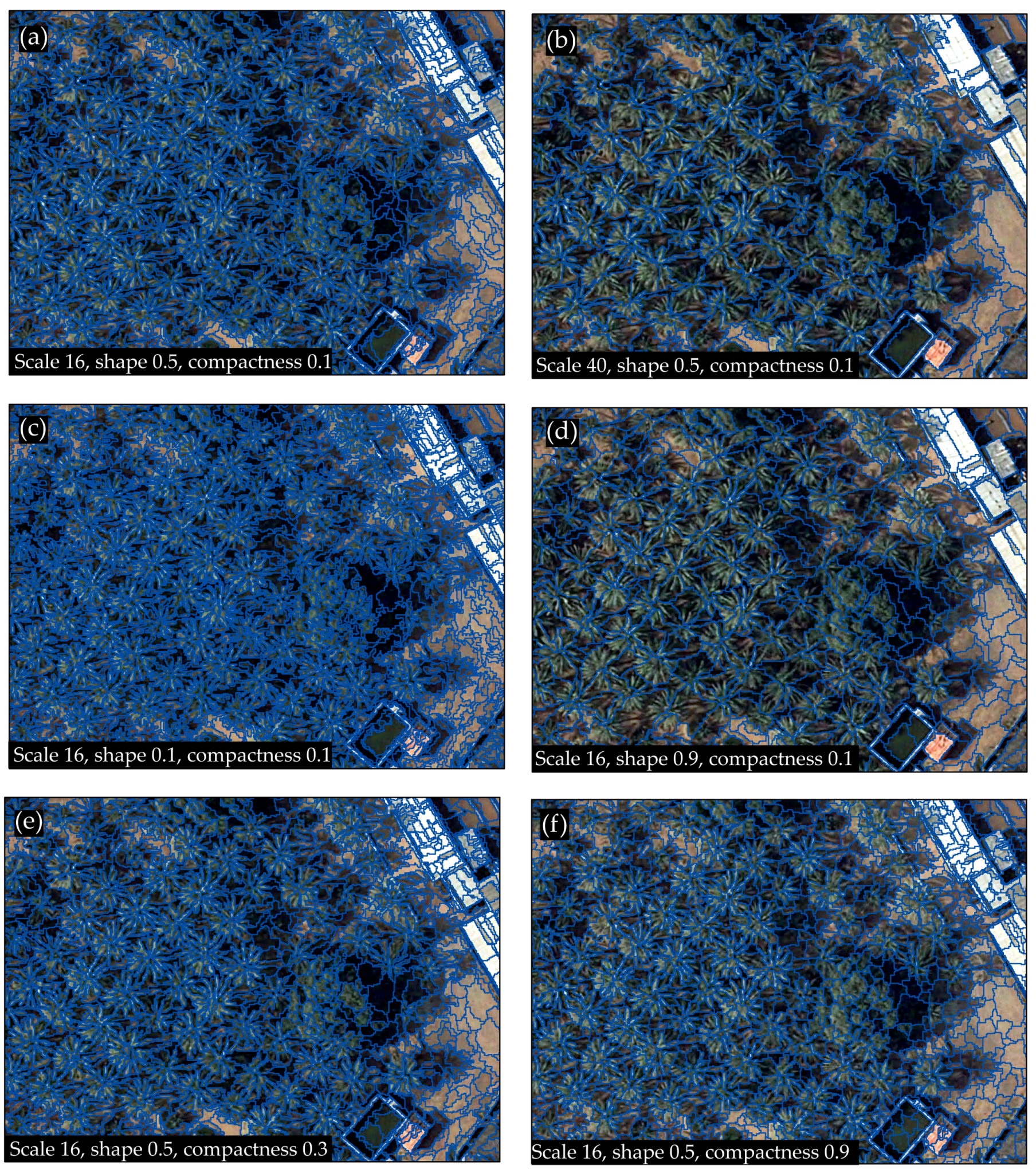
41] used an RF classification algorithm to evaluate the image segmentation result and identified the optimum segmentation scale to obtain high classification accuracy of land-cover classes from spot scenes. The strength of this approach is that it enables the analyst to evaluate image segmentation alternatives and their predicted classification accuracy on small image subsets without classifying the entire image or assessing the accuracy of many map products derived from image segmentation. Most of the system/application-level techniques used to evaluate segmentation quality focus on finding the optimum scale parameter while keeping the shape and compactness parameters fixed. Selection of various combinations of MRS parameters often results in different segmentation outputs with unique ways of delineating the objects of interest, as shown in
Figure 8. It clearly depicts a visual comparison of how the changes in the combinations of MRS parameters can affect the way that date palm trees and built-up areas are segmented.
Figure 8a,b show effect of various values of the scale parameter on segmentation results, while
Figure 8c,d show the effect of various values of the shape parameter and finally
Figure 8d,f illustrate the effect of various values of compactness parameter.
Because different classes or components of a particular class might need to be analyzed and extracted at multiple scales, different optimal scales are often required to achieve an accurate result. However, since this study was focused on extracting date palm trees specifically, and these trees have relatively similar sizes, a single segmentation scale was optimized and selected. To minimize the confusion between date palm trees and the rest of the classes in the images, a spectral difference segmentation algorithm was applied on the optimized image object by MRS to merge objects with a small difference in their spectral values.
In this study, the optimal combinations of MRS parameters were defined as the parameters that produce the highest accuracy for classifying date palm trees. The synergy of the Taguchi statistical technique and F1-score for the classification of date palm trees was used to optimize the MRS parameters. The segmentation experiment was carried out on a small image subset with an area of 0.292 km2, to minimize the processing time and storage. A DT classifier was applied to classify 25 segmentation results suggested by an L25 orthogonal array based on the same training samples. The date palm tree accuracy measure was computed for the 25 experiments. SNR was computed to determine the optimum MRS parameter that was suitable for mapping date palm trees, because some experiments may have similar classification outputs. The optimal result is pinpointed when high SNR occurs. The MRS parameters proposed by the integration of the F1-score with the robust Taguchi approach were tested with the performance of the common OF with the Taguchi method, to investigate the efficiency of the proposed method. Although the results of the two methods were pinpointed the same scale level, they obtained different shape and compactness values. The segmentation results of the F1-score and OF were classified using the NB classifier. The proposed method achieved improvements in the OA, KC, and class-specific accuracy for classifying date palms.
The quality of the ultimate GEOBIA classification result is highly dependent on the image segmentation, as well as on using relevant and appropriate numbers of features. Use of feature-selection methods in GEOBIA has been studied, and it produced significantly different outputs with regard to the number of selected features and the achieved classification accuracy [
43,
72,
73,
74]. In the current study, ACO was employed to select the most significant features that contribute to differentiating date palm trees from other LULC classes. ACO is considered to be more computationally efficient than PSO and a genetic algorithm [
17]. Among the tested features mentioned in
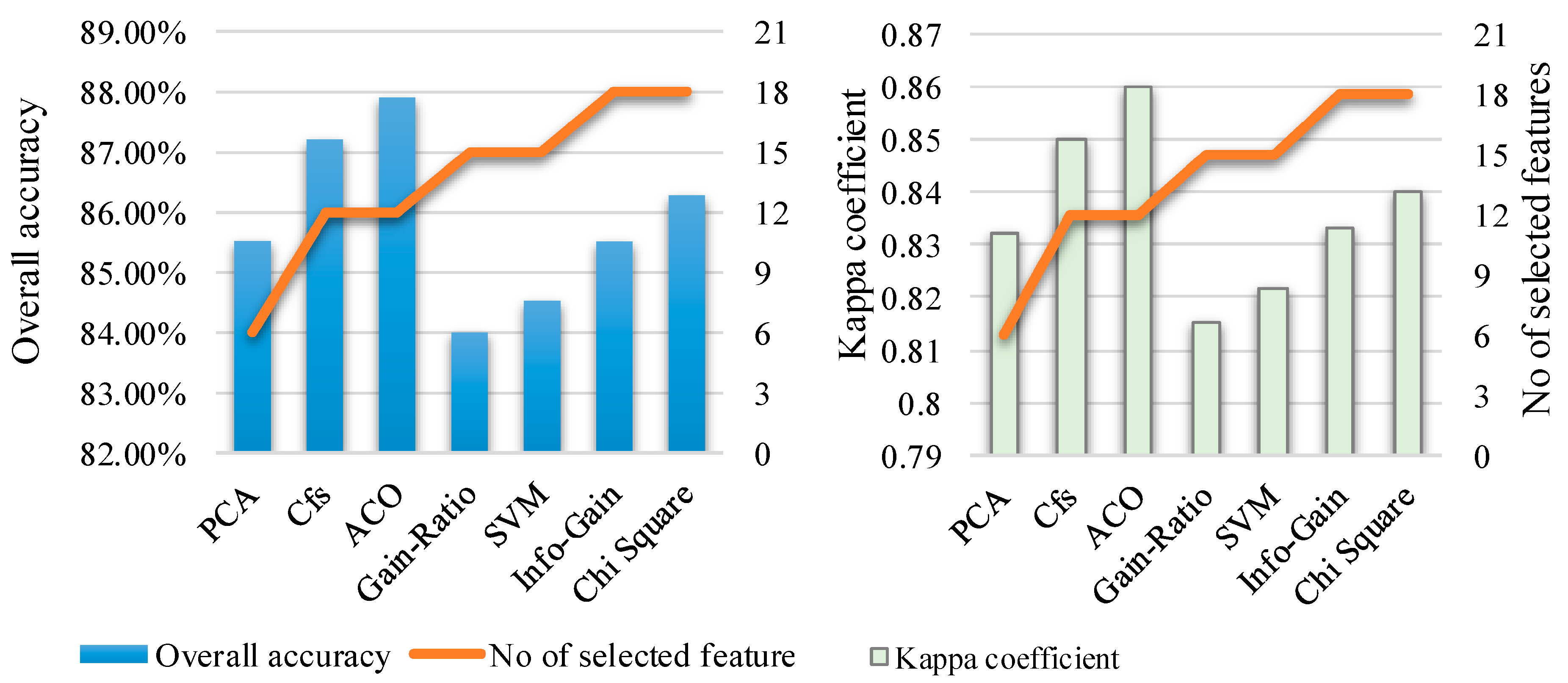
Section 2, 31 features were proposed, based on extensive literature and the authors’ general knowledge and experience. Ten ACO experiments were conducted to return the best features with a particular percentage from the total features, starting from 10%, to 20%, and so on, up to 90% out of the total features. The fourth experiment with 12 features provided the highest classification accuracy and it was used for further analysis. Several feature-selection techniques, including PCA, CFS, SVM, information gain, gain ratio, and chi-square, were used to investigate the efficiency of ACO. ACO, followed by CFS, outperformed the other methods with regard to OA, KC, and F1-score for classifying date palm trees. A previous study [
13] confirmed that CFS and ACO outperformed the RF algorithm to improve the differentiation between two types of landslide.
Image object classification adopted in research is the ultimate step in the GEOBIA approach that follows image segmentation and feature selection. Classification techniques in the GEOBIA environment can be categorized into rule-based and supervised methods. Reference [
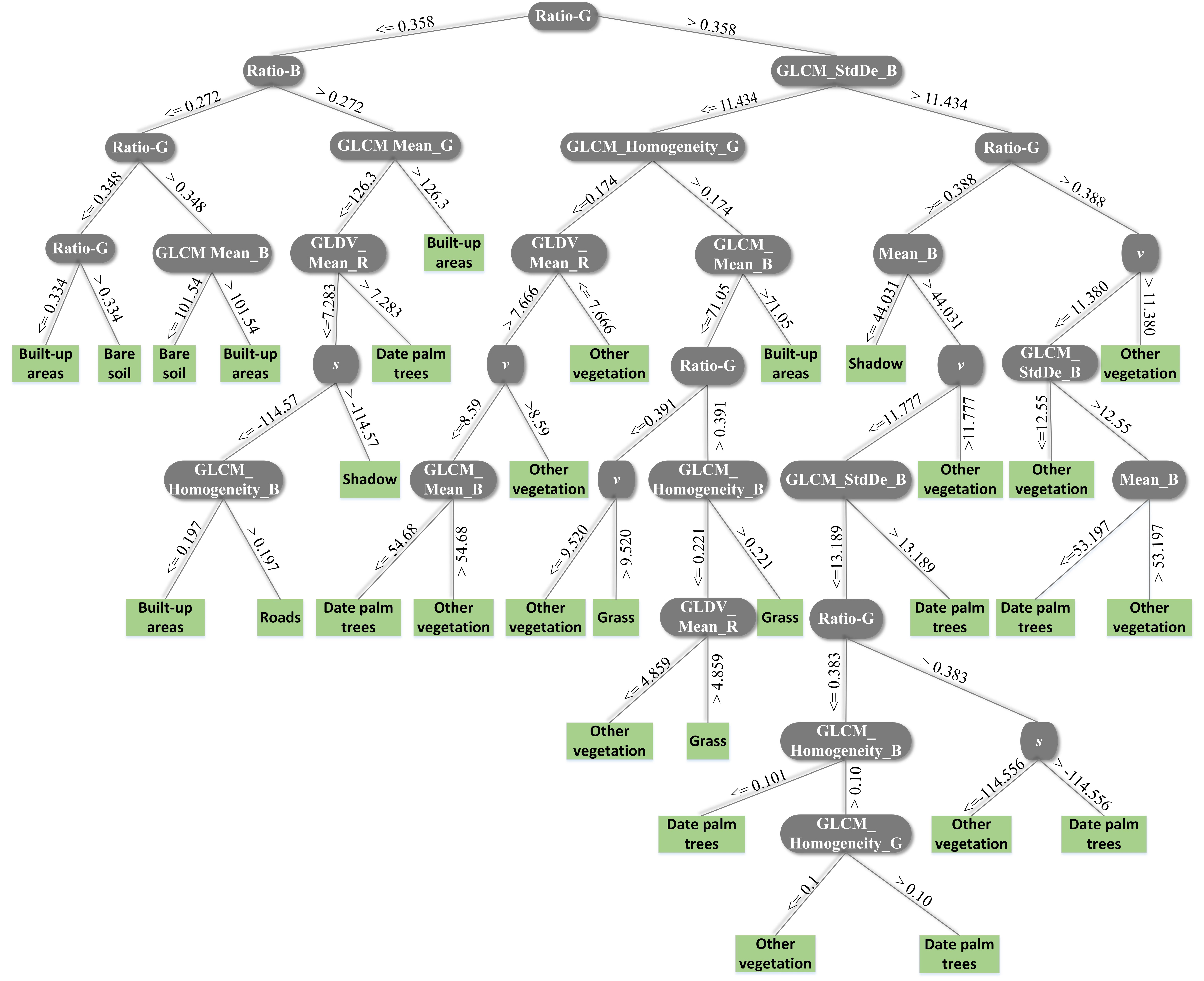
37] compared rule-based classification to several unsupervised algorithms, including RF, SVM, Bayes, and k-nearest neighbor, to map asbestos cement roofs obtained from WorldView-2 images. They concluded that rule-based classification provided the highest classification accuracy and allowed the transferability of the proposed method. However, every classification technique in the GEOBIA environment might provide different classification results because GEOBIA is affected by image segmentation, feature selection, and the adopted classification algorithm. In the present study, rule-based classification was applied based on the DT classifier. The DT was built through a set of training samples collected from date palm trees of different ages, heights, and health status, and by using the rest of the various LULC classes. As shown in
Figure 4, image objects were categorized as vegetation and non-vegetation based on the Ratio-G index. In addition, the color invariant index was a very effective index that contributed to the differentiation between the date palm and various vegetation species. Each date palm tree is segmented into different image objects because the leaves of a tree are not spatially connected, and some shadow might exist between them. Thus, small objects on a date palm tree might share similar spectral and textural attributes with some vegetation species in the RGB image. However, date palm trees have unique textural and color invariant characteristics that distinguish them from other trees. For example, GLCM_homogeneity-B, GLCM_homogeneity-G were observed to be the most distinct textural features for date palm trees, while Ratio-G, -V, and -S were the most effective color invariants that contributed to the detection and the refinement of the date palm trees Class. Therefore, the combinations of various color invariants and textural features were used to detect and map date palm trees from VHSR aerial images.
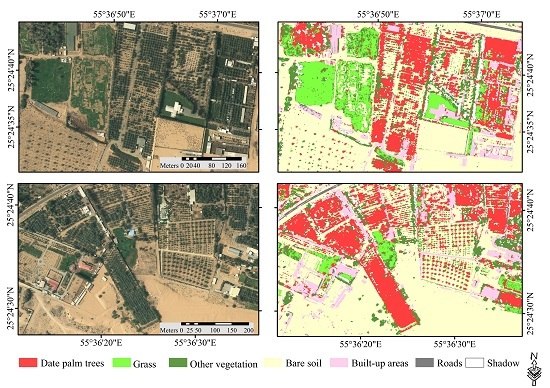
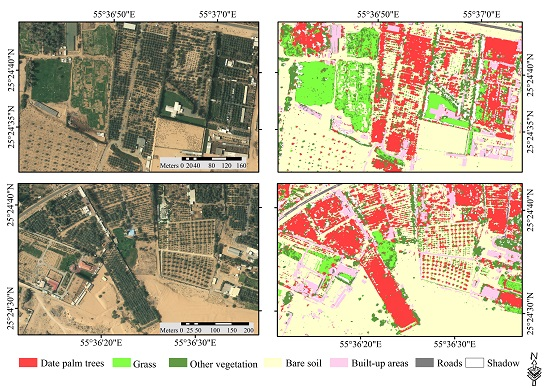
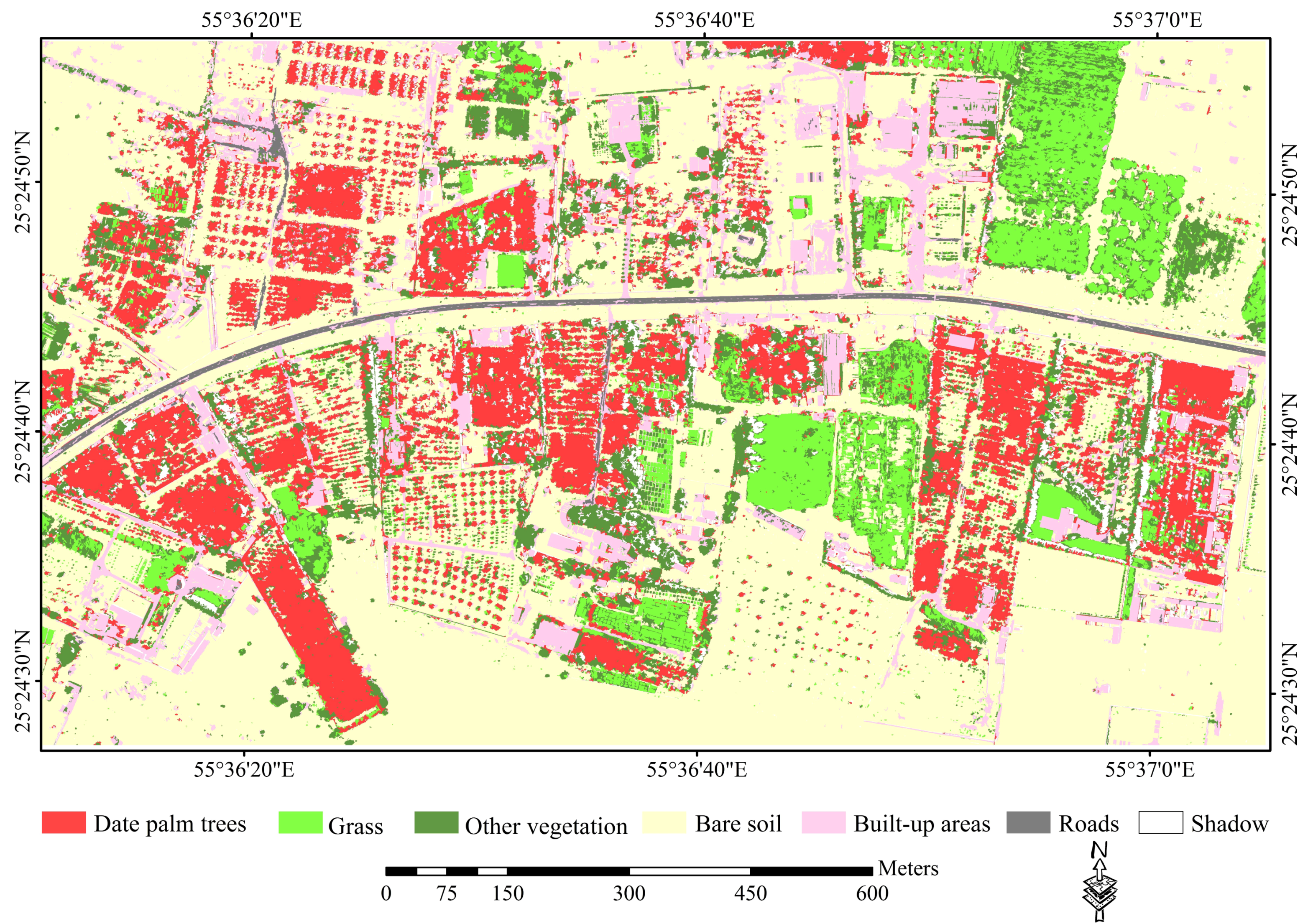
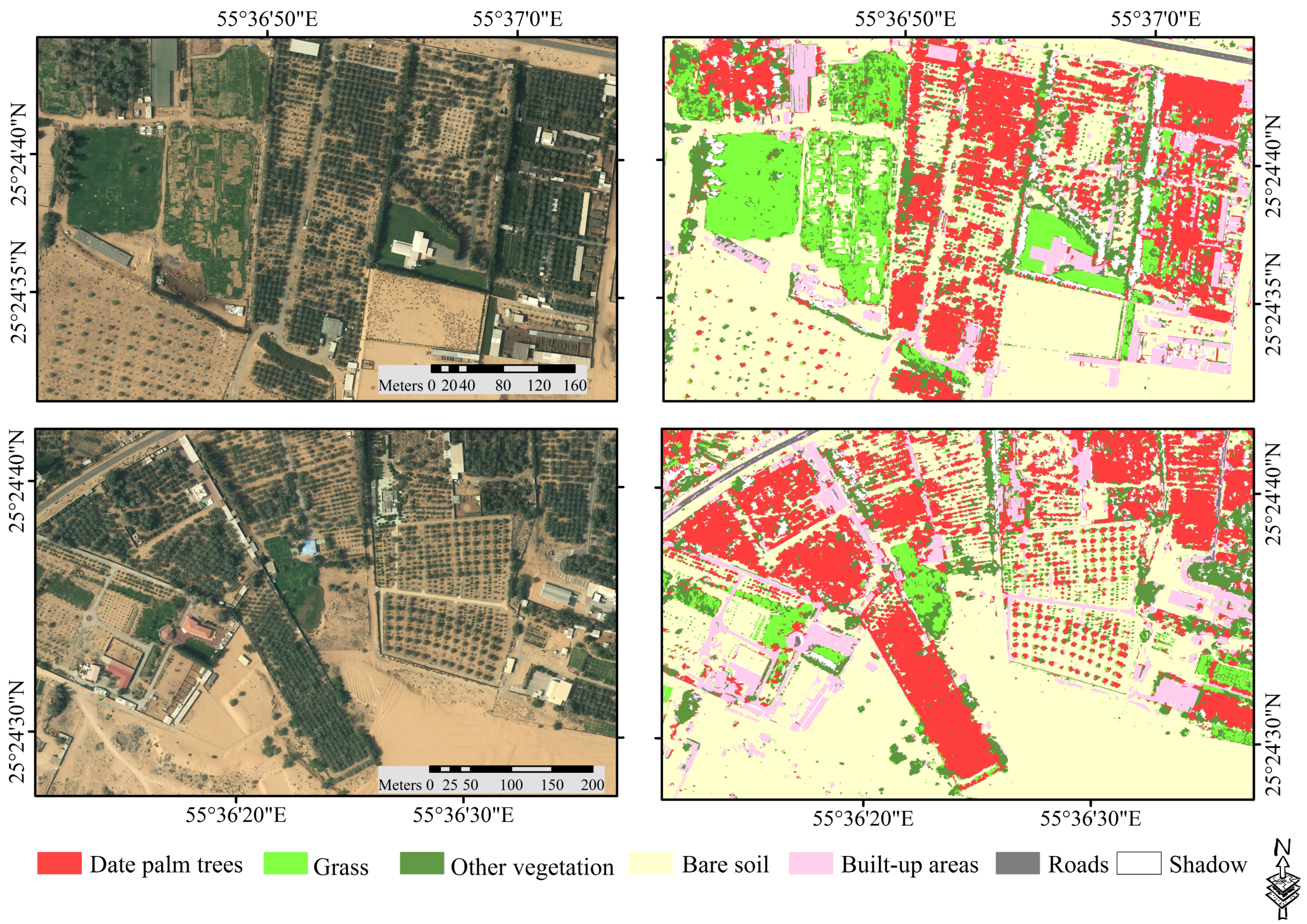
The rule-based classification based on DT, SVM, RF, and k-NN algorithms were conducted to classify the first study area (
Figure 5 and
Figure 7). Rule-based classification based on DT outperformed the supervised GEOBIA classifiers. The proposed GEOBIA classification approach through the integration of F1-score, Taguchi design, ACO, and rule-based classification was very promising and yielded an OA of 91.9%, a KC of 0.9, and a date palm accuracy-specific measure of 0.91. Minor misclassifications of objects containing date palm trees were encountered with several image objects of the other vegetation class, and built-up areas mixed with vegetation and shadow, as shown in
Figure 9. This misclassification might be attributed to different reasons. For example, image segmentation might be a factor, given the imperfect image segmentation, the lack of spectral information of the RGB image, the dryness of some parts of the date palm trees, and the presence of shadow.
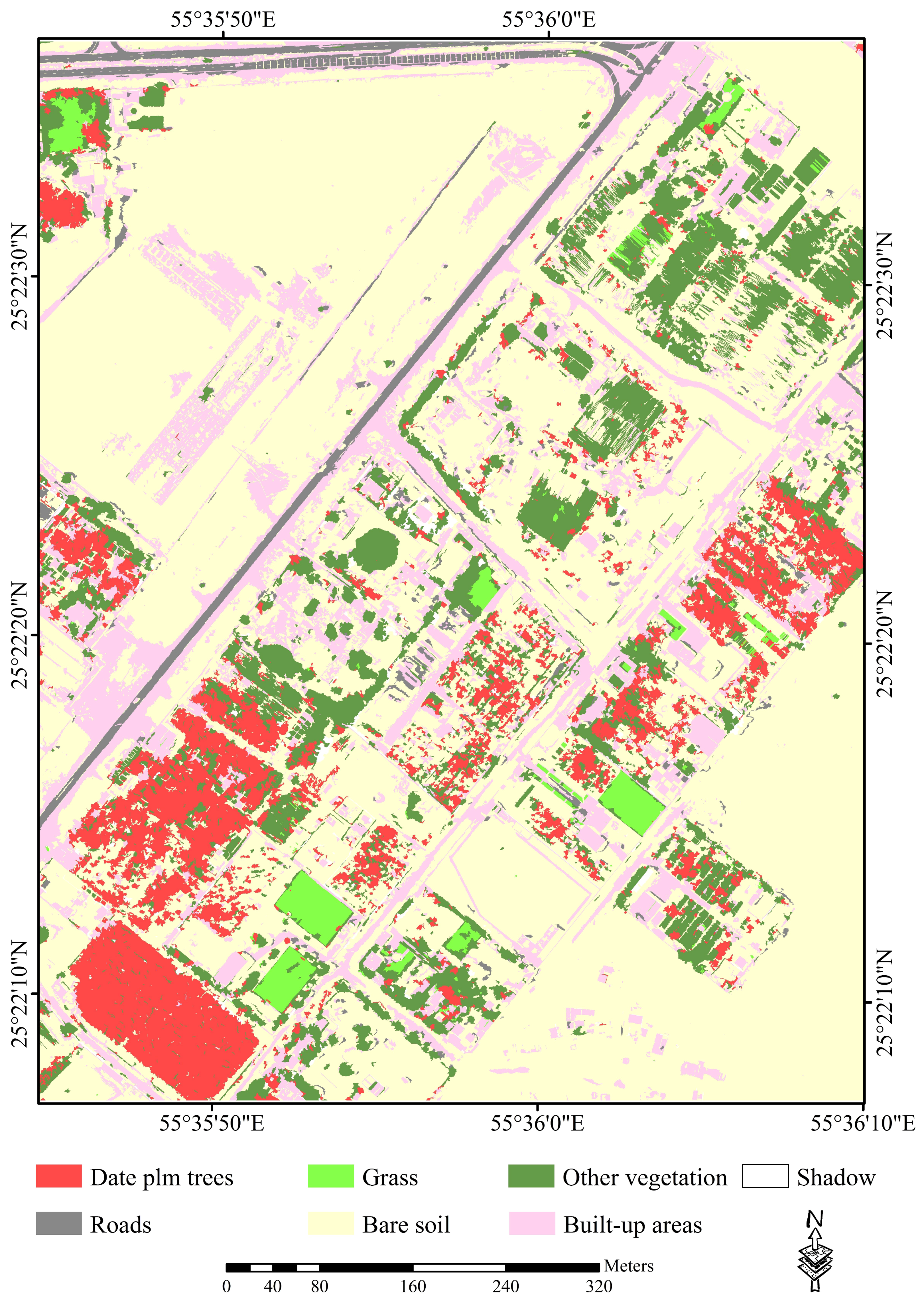
The transferability of the proposed method was investigated by applying it to another study area. Although the second study area was different from the first study area in terms of heterogeneity and contrast of the RGB color, realistic classification results were achieved, with OA, KC, and F1-score values for classifying date palm trees of 87.0%, 0.85, and 0.89, respectively. The minor misclassification can be improved by adding contextual features for refining the final results. The misclassified date palm objects that are within a small distance from the date palm classification can be reassigned to their right classifications, based on the “relation-to-neighbor-objects” attribute. Moreover, some morphological and reshaping features might be added to increase the accuracy of the classification result. Having sufficient spectral information improves the differentiation among healthy and unhealthy date palm trees with subtle differences, and this aspect can be very challenging if an RGB image is used. The integration of RGB images and digital surface models can be another solution to performing high-quality mapping of date palms.
5. Conclusions
Date palm trees play vital societal, commercial, and environmental roles in the UAE. Accurate and up-to-date information on date palm trees contribute to their monitoring, yield estimation, and environmental impacts. This study aimed to detect and map date palm trees from very-high-resolution aerial imagery. This study integrated GEOBIA, the F1-score, the Taguchi statistical technique, and ACO, to map and improve the detection and mapping of date palm trees.
Image segmentation quality had a great impact on classification results, where the F1-score and Taguchi optimization were used to obtain the optimum combinations of MRS parameters. The advantage of this method is that it can be applied to optimize the parameters of MRS, based on a small data set generalized to a segment’s larger images. The first study area was segmented using the optimum MRS parameters, and 31 features were computed for all image objects. ACO was employed, due to its efficiency to obtain the most relevant features among the 31 tested features; based on its data, various color invariants and textural parameters (12 features) were chosen. The result is that ACO achieved the highest accuracy when compared to several other feature-selection techniques that include PCA, CFS, SVM, information gain, gain ratio, and chi-square.
Finally, a rule-based classification technique based on DT was adopted. The proposed method was built from a selected study area. The adopted classification method in the proposed method was compared with three supervised GEOBIA classifiers: RF, SVM, and k-NN. A rule-based classifier based on DT outperformed the supervised GEOBIA classifiers.
Another study area was used to investigate the effectiveness of the proposed method in mapping date palm trees. The proposed method yielded promising results and represents an efficient tool for mapping date palm trees from very-high-resolution RGB images. The proposed method also provides a robust classification scheme for extracting date palm trees from fine spatial resolution, and can be used to map other objects of interest while maintaining a high degree of classification accuracy.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}