Automated Cobble Mapping of a Mixed Sand-Cobble Beach Using a Mobile LiDAR System

Abstract
1. Introduction
2. Background
3. Materials and Methods
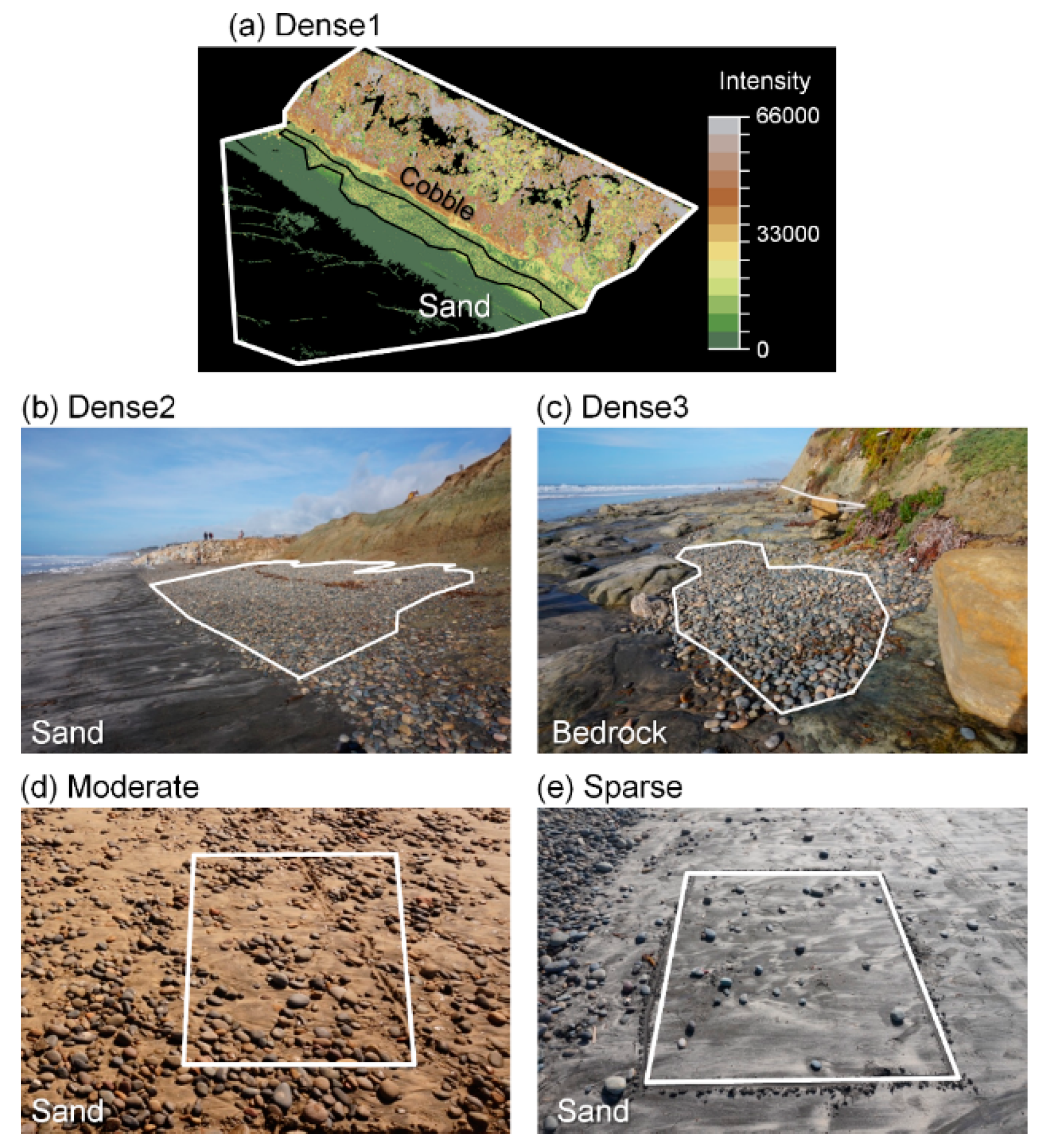
3.1. Study Area
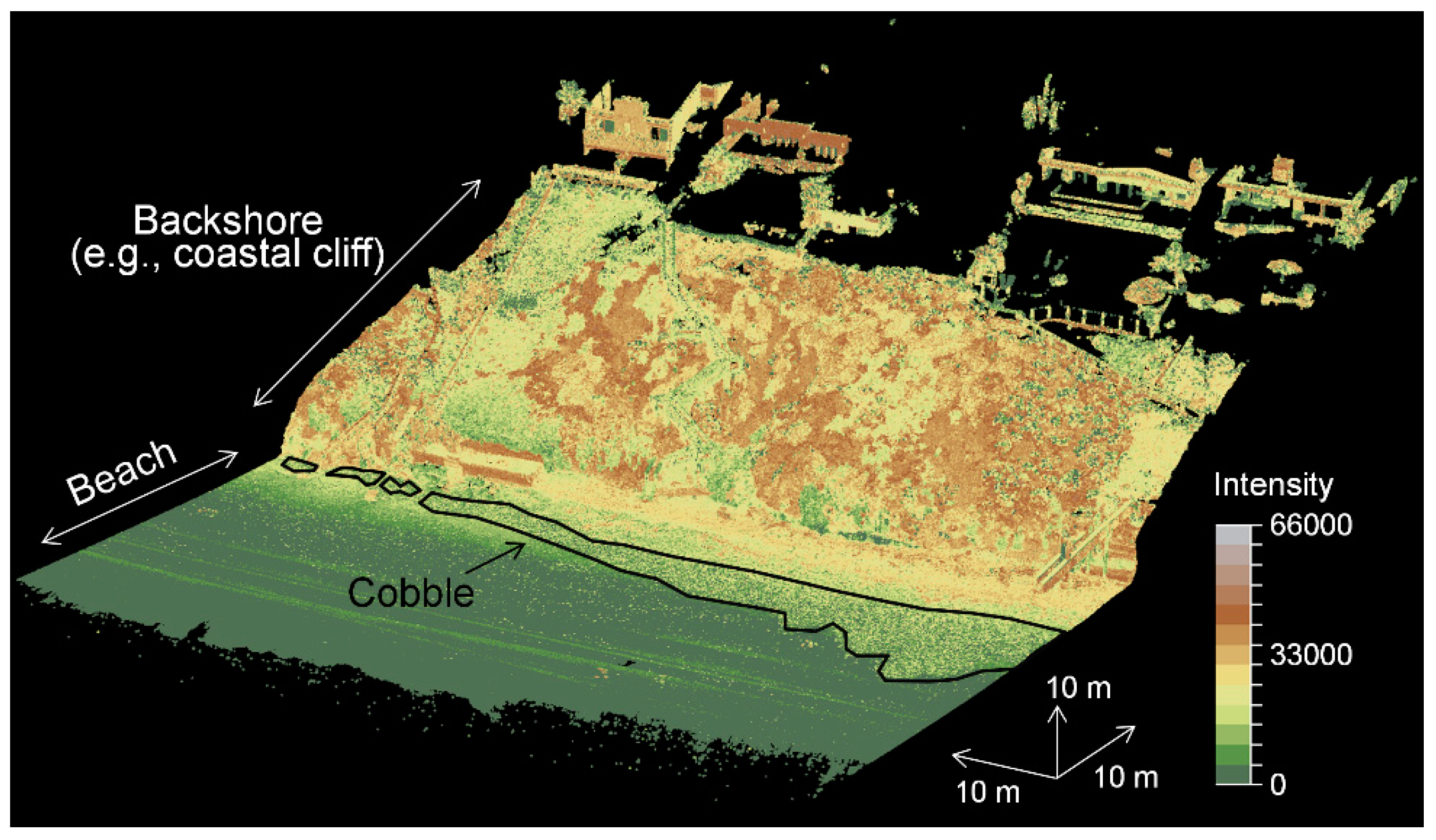
3.2. LiDAR Data Collection and Processing
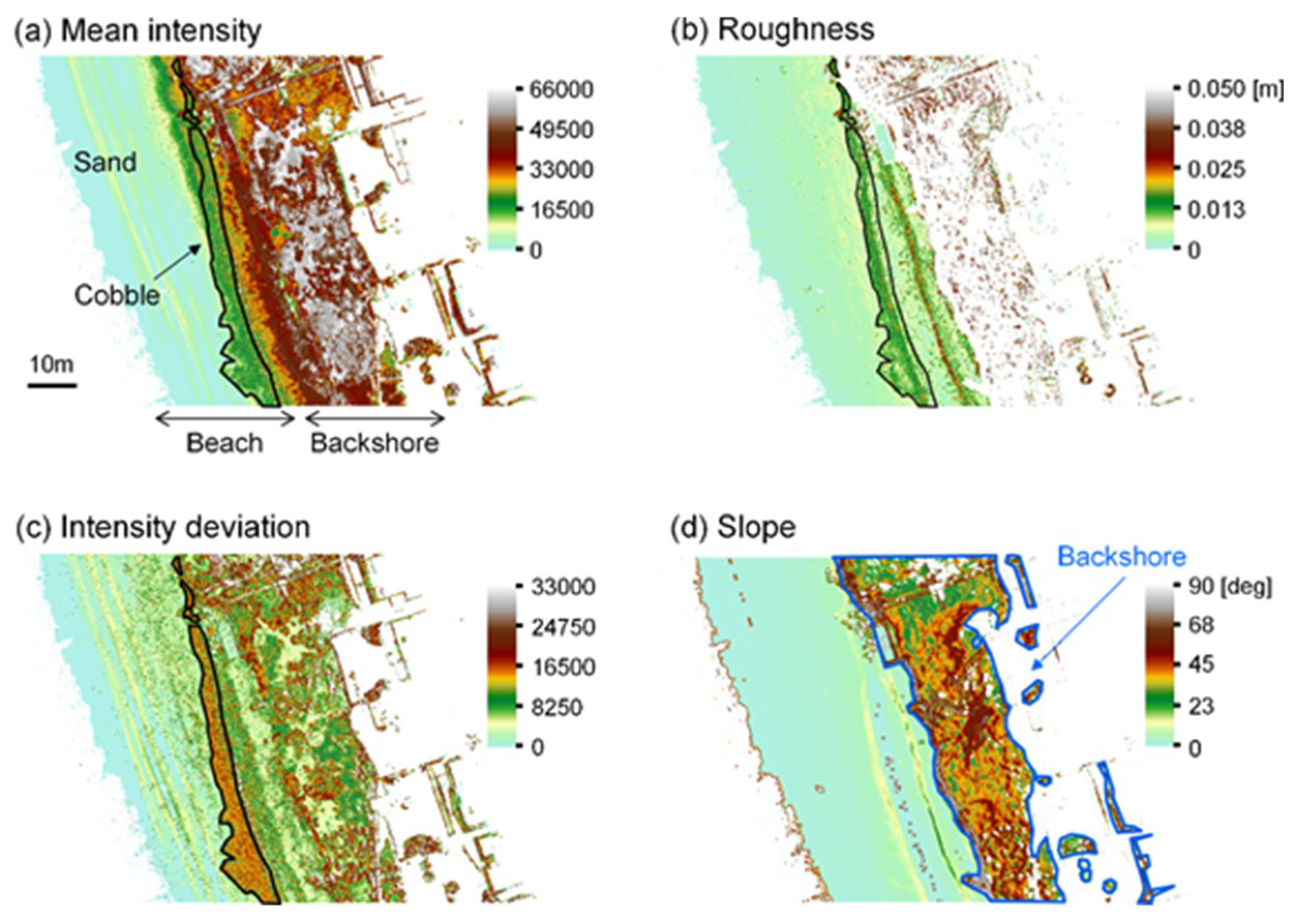
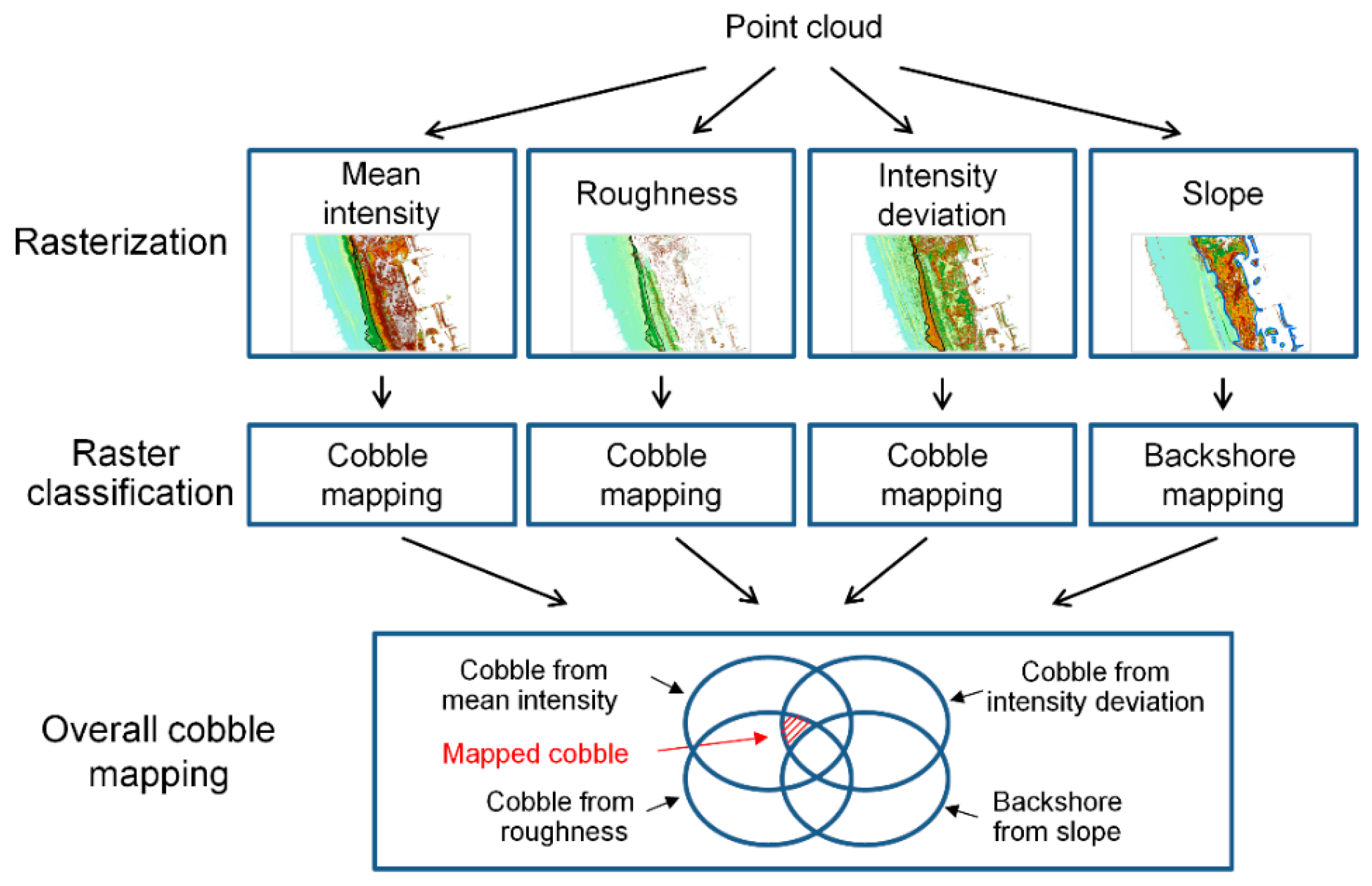
3.3. Raster Based Cobble Detection
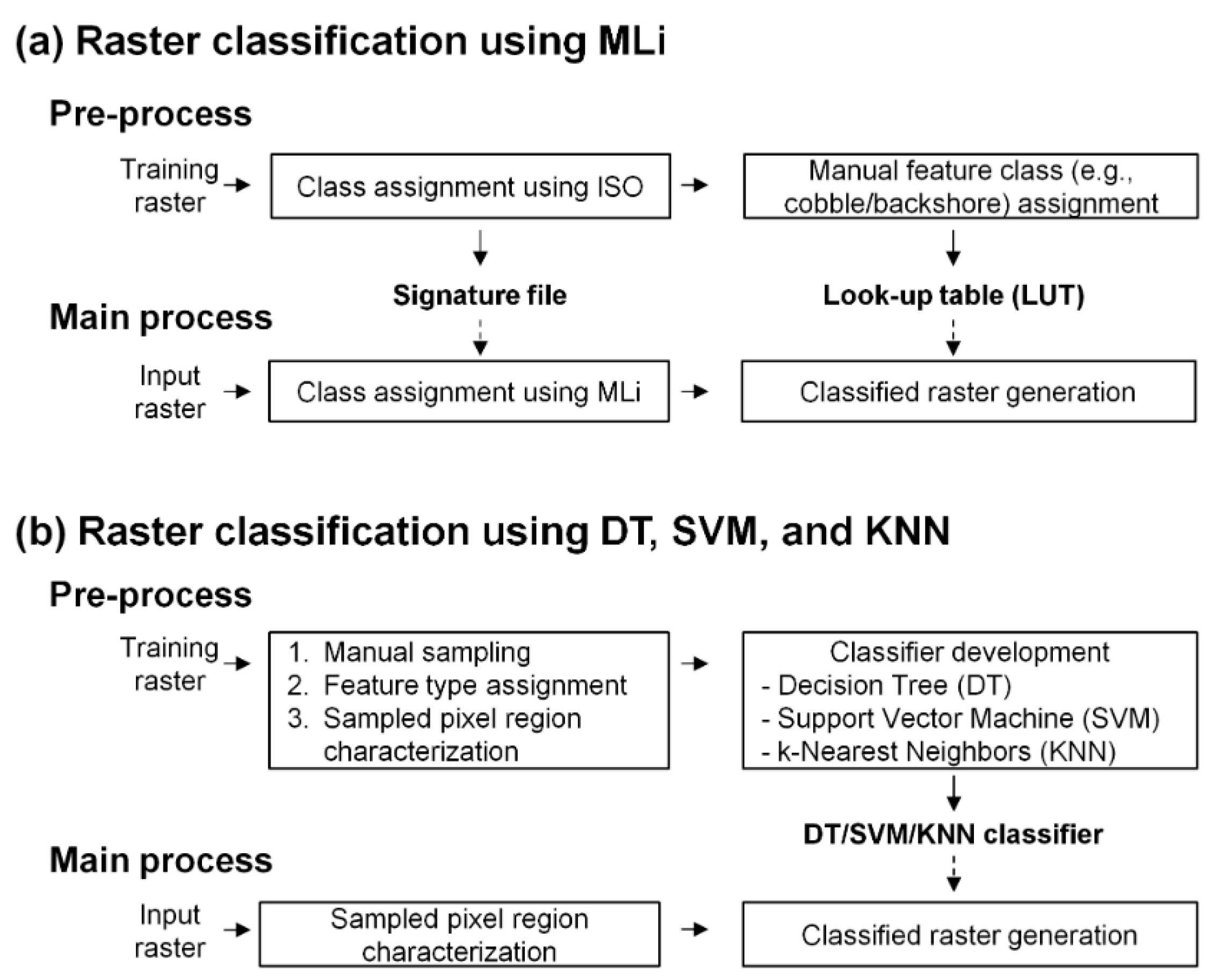
3.4. Raster Classification
3.5. Control Site Manual Mapping
4. Results
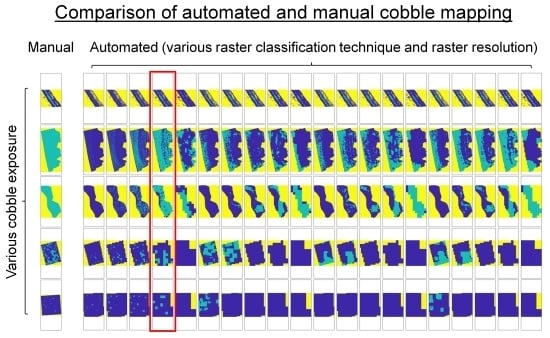
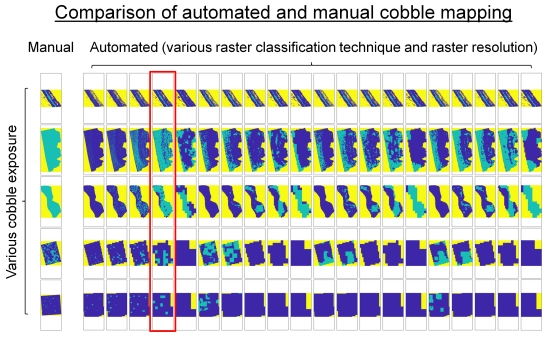
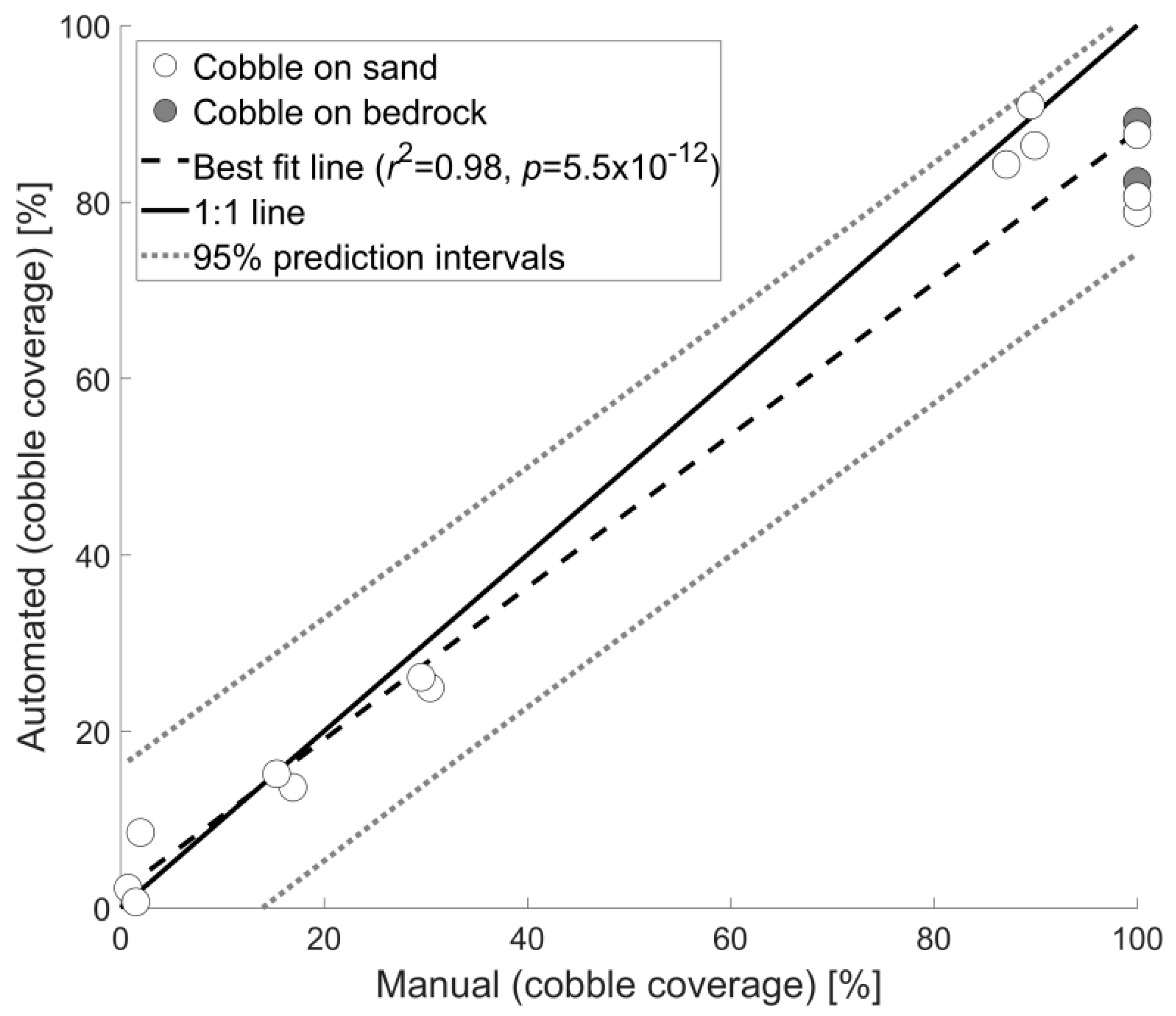
4.1. Comparison of Automated and Manual Mapping
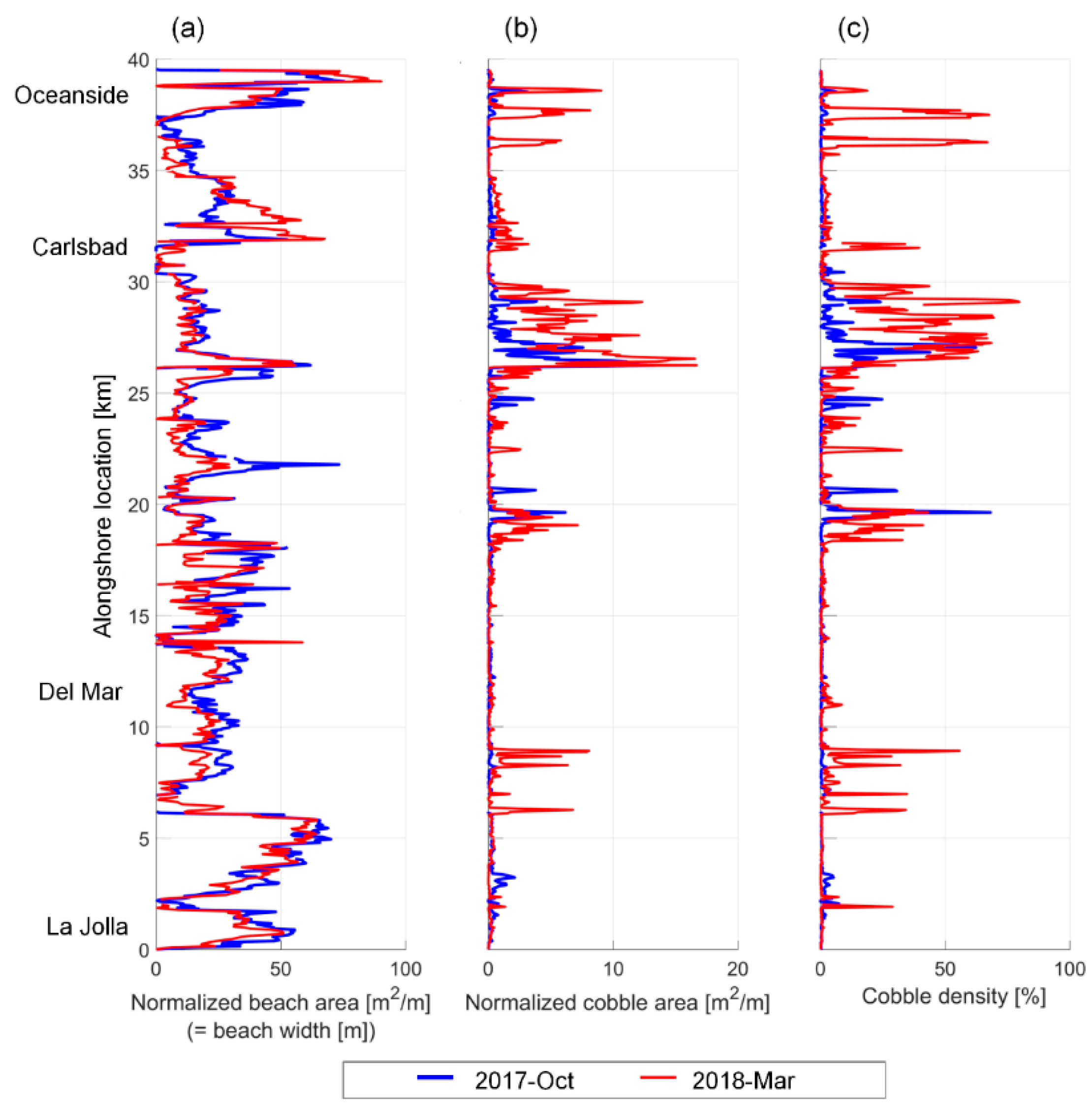
4.2. Regional Application
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wentworth, C.K. A scale of grade and class terms for clastic sediments. J. Geol. 1992, 30, 377–392. [Google Scholar] [CrossRef]
- Holland, K.T.; Elmore, P.A. A review of heterogeneous sediments in coastal environments. Earth Sci. Rev. 2008, 89, 116–134. [Google Scholar] [CrossRef]
- Carter, R.W.G.; Orford, J.D. The Morphodynamics of Coarse Clastic Beaches and Barriers: A Short-and Long-term Perspective. J. Coast. Res. 1993, 15, 158–179. [Google Scholar]
- Jackson, D.W.T.; Cooper, J.A.G.; del Rio, L. Geological control of beach morphodynamic state. Mar. Geol. 2005, 216, 297–314. [Google Scholar] [CrossRef]
- Bascom, W.C. The relationship between sand size and beach-face slope. Trans. Am. Geophys. Union 1951, 32, 866–874. [Google Scholar] [CrossRef]
- Jennings, R.; Shulmeister, J. A field based classification scheme for gravel beaches. Mar. Geol. 2002, 186, 211–228. [Google Scholar] [CrossRef]
- Kuhn, G.G.; Shepard, F.P. Sea Cliffs, Beaches, and Coastal Valleys of San Diego County: Some Amazing Histories and Some Horrifying Implications; University of California Press: Berkeley, CA, USA, 1984. [Google Scholar]
- Everts, C.H.; Eldon, C.D.; Moore, J. Performace of Cobble Berms in Southern California. Shore Beach 2002, 70, 5–14. [Google Scholar]
- Schupp, R.D. A Study of the Cobble Beach Cusps along Santa Monica Bay, California. Master’s Thesis, University of Southern California, Los Angeles, CA, USA, August 1953. [Google Scholar]
- Shepard, F.P. Gravel Cusps on the California Coast Related to Tides. Science 1935, 82, 251–253. [Google Scholar] [CrossRef] [PubMed]
- Yates, M.L.; Guza, R.T.; O’Reilly, W.C.; Seymour, R.J. Overview of seasonal sand level changes on southern California beaches. Shore Beach 2009, 77, 39–46. [Google Scholar]
- Doria, A.; Guza, R.T.; O’Reilly, W.C.; Yates, M.L. Observations and modeling of San Diego beaches during El Niño. Cont. Shelf Res. 2016, 124, 153–164. [Google Scholar] [CrossRef]
- Carter, R.W.G.; Orford, J.D. Corse classitic barrier beaches: A discussion of the distinctive dynamic and morpho sedimentary characteristics. Mar. Geol. 1984, 60, 377–389. [Google Scholar] [CrossRef]
- Forbes, D.L.; Orford, J.D.; Carter, R.W.G.; Shaw, J.; Jennings, S.C. Morphodynamic evolution, self-organisation, and instability of coarse-clastic barriers on paraglacial coasts. Mar. Geol. 1995, 126, 63–85. [Google Scholar] [CrossRef]
- Orford, J.D.; Forbes, D.L.; Jennings, S.C. Organisational controls, typologies and time scales of paraglacial gravel-dominated coastal systems. Geomorphology 2002, 48, 51–85. [Google Scholar] [CrossRef]
- Bradbury, A.P.; Powell, K.A. The Short Term Profile Response of Shingle Spits to Storm Wave Action. In Proceedings of the 23rd Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992. [Google Scholar]
- Allan, J.C.; Komar, P.D. Environmentally Compatible Cobble Berm and Artificial Dune for Shore Protection. Shore Beach 2004, 72, 9–18. [Google Scholar]
- Kochnower, D.; Reddy, S.M.W.; Flick, R.E. Factors influencing local decisions to use habitats to protect coastal communities from hazards. Ocean Coast. Manag. 2015, 116, 277–290. [Google Scholar] [CrossRef]
- Allan, J.C.; Hart, R. Profile dynamics and particle tracer mobility of a cobble berm constructed on the oregon coast. In Proceedings of the 6th International Symposium on Coastal Engineering and Science of Coastal Sediment Processes, New Orleans, LA, USA, 13–17 May 2007. [Google Scholar]
- Forbes, D.L.; Taylor, R.B.; Orford, J.D.; Carter, R.W.G.; Shaw, J. Gravel-barrier migration and overstepping. Mar. Geol. 1991, 97, 305–313. [Google Scholar] [CrossRef]
- Allan, J.C.; Hart, R.; Tranquili, J.V. The use of Passive Integrated Transponder (PIT) tags to trace cobble transport in a mixed sand-and-gravel beach on the high-energy Oregon coast, USA. Mar. Geol. 2006, 232, 63–86. [Google Scholar] [CrossRef]
- Curtiss, G.M.; Osborne, P.D.; Horner-Devine, A.R. Seasonal patterns of coarse sediment transport on a mixed sand and gravel beach due to vessel wakes, wind waves, and tidal currents. Mar. Geol. 2009, 259, 73–85. [Google Scholar] [CrossRef]
- Dickson, M.E.; Kench, P.S.; Kantor, M.S. Longshore transport of cobbles on a mixed sand and gravel beach, southern Hawke Bay, New Zealand. Mar. Geol. 2011, 287, 31–42. [Google Scholar] [CrossRef]
- Stark, N.; Hay, A.E. Pebble and cobble transport on a steep, mega-tidal, mixed sand and gravel beach. Mar. Geol. 2016, 382, 210–223. [Google Scholar] [CrossRef]
- Kench, P.S.; Beetham, E.; Bosserelle, C.; Kruger, J.; Pohler, S.M.L.; Coco, G.; Ryan, E.J. Nearshore hydrodynamics, beachface cobble transport and morphodynamics on a Pacific atoll motu. Mar. Geol. 2017, 389, 17–31. [Google Scholar] [CrossRef]
- Adams, P.N.; Ruggiero, P.; Schoch, G.C.; Gelfenbaum, G. Intertidal sand body migration along a megatidal coast, Kachemak Bay, Alaska. J. Geophys. Res. Earth Surf. 2007, 112, F02007. [Google Scholar] [CrossRef]
- Ruggiero, P.; Adams, P.N.; Warrick, J.A. Mixed Sediment Beach Processes: Kachemak Bay, ALASKA. In Proceedings of the 6th International Symposium on Coastal Engineering and Science of Coastal Sediment Processes, New Orleans, LA, USA, 13–17 May 2007. [Google Scholar]
- Pérez-Alberti, A.; Trenhaile, A.S. An initial evaluation of drone-based monitoring of boulder beaches in Galicia, north-western Spain. Earth Surf. Process. Landforms 2015, 40, 105–111. [Google Scholar] [CrossRef]
- Rubin, D.M. A Simple Autocorrelation Algorithm for Determining Grain Size from Digital Images of Sediment. J. Sediment. Res. 2004, 74, 160–165. [Google Scholar] [CrossRef]
- Barnard, P.L.; Rubin, D.M.; Harney, J.; Mustain, N. Field test comparison of an autocorrelation technique for determining grain size using a digital ‘beachball’ camera versus traditional methods. Sediment. Geol. 2007, 201, 180–195. [Google Scholar] [CrossRef]
- Buscombe, D.; Masselink, G. Grain-size information from the statistical properties of digital images of sediment. Sedimentology 2009, 56, 421–438. [Google Scholar] [CrossRef]
- Warrick, J.A.; Rubin, D.M.; Ruggiero, P.; Harney, J.N.; Draut, A.E.; Buscombe, D. Cobble cam: Grain-size measurements of sand to boulder from digital photographs and autocorrelation analyses. Earth Surf. Process. Landforms 2009, 34, 1811–1821. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Lane, S.N.; Bergeron, N.E. Catchment-scale mapping of surface grain size in gravel bed rivers using airborne digital imagery. Water Resour. Res. 2004, 40, W07202. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Bergeron, N.; Lane, S.N. Automated grain size measurements from airborne remote sensing for long profile measurements of fluvial grain sizes. Water Resour. Res. 2005, 41, W11426. [Google Scholar] [CrossRef]
- Deronde, B.; Houthuys, R.; Debruyn, W.; Fransaer, D.; Van Lancker, V.; Henriet, J.-P. Use of Airborne Hyperspectral Data and Laserscan Data to Study Beach Morphodynamics along the Belgian Coast. J. Coast. Res. 2006, 22, 1108–1117. [Google Scholar] [CrossRef]
- Deronde, B.; Houthuys, R.; Henriet, J.-P.; Van Lancker, V. Monitoring of the sediment dynamics along a sandy shoreline by means of airborne hyperspectral remote sensing and LiDAR: A case study in Belgium. Earth Surf. Process. Landforms 2008, 33, 280–294. [Google Scholar] [CrossRef]
- Beasy, C.; Hopkinson, C.; Webster, T. Classification of nearshore materials on the Bay of Fundy coast using LiDAR intensity data. In Proceedings of the 26th Canadian Symposium on Remote Sensing, Walfville, NS, Canada, 14–16 June 2005. [Google Scholar]
- Cottin, A.G.; Forbes, D.L.; Long, B.F. Shallow seabed mapping and classification using waveform analysis and bathymetry from SHOALS lidar data. Can. J. Remote Sens. 2009, 35, 422–434. [Google Scholar] [CrossRef]
- Fairley, R.D.; Thomas, I.; Phillips, T.; Reeve, D. Terrestrial Laser Scanner Techniques for Enhancement in Understanding of Coastal Environments. In Seafloor Mapping along Continental Shelves: Research and Techniques for Visualizing Benthic Environments (Coastal Research Library); Finkl, C.W., Makowski, C., Eds.; Springer International Publishing: Zürich, Switzerland, 2016; pp. 273–289. ISBN 978-3-319-25121-9. [Google Scholar]
- Woodget, A.S.; Austrums, R. Subaerial grain size measurement using topographic data derived from a UAV-SfM approach. Earth Surf. Process. Landforms 2017, 42, 1434–1443. [Google Scholar] [CrossRef]
- Brock, J.C.; Purkis, S.J. The Emerging Role of Lidar Remote Sensing in Coastal Research and Resource Management. J. Coast. Res. 2009, 25, 1–5. [Google Scholar] [CrossRef]
- Young, A.P. Decadal-scale coastal cliff retreat in southern and central California. Geomorphology 2018, 300, 164–175. [Google Scholar] [CrossRef]
- Matsumoto, H.; Dickson, M.E.; Masselink, G. Systematic analysis of rocky shore platform morphology at large spatial scale using LiDAR-derived digital elevation models. Geomorphology 2017, 286, 45–57. [Google Scholar] [CrossRef]
- Webster, T.L.; Forbes, D.L.; Dickie, S.; Shreenan, R. Using topographic lidar to map flood risk from storm-surge events for Charlottetown, Prince Edward Island, Canada. Can. J. Remote Sens. 2004, 30, 64–76. [Google Scholar] [CrossRef]
- Inman, D.L.; Zampol, J.A.; White, T.E.; Hanes, D.M.; Waldorf, B.W.; Kastens, K.A. Feild measurements of sand motion in the surf zone. In Proceedings of the 17th International Symposium on Coastal Engineering, Sydney, Australia, 23–28 March 1980. [Google Scholar]
- Kennedy, M.P. Geology of the San Diego metropolitan area, western area. Geotherm. Resour. Counc. Trans. 1975, 27, 765–770. [Google Scholar]
- Young, A.P.; Raymond, J.H.; Sorenson, J.; Johnstone, E.A.; Driscll, N.W.; Flick, R.E.; Guza, R.T. Coarse sediment yields from seacliff erosion in the Oceanside Littoral Cell. J. Coast. Res. 2010, 26, 580–585. [Google Scholar] [CrossRef]
- Abbott, P. The Rise and Fall of San Diego: 150 Million Years of History Recorded in Sedimentary Rocks; Sunblet Publications, Inc.: San Diego, CA, USA, 1999; ISBN 9780932653314. [Google Scholar]
- Young, A.P.; Flick, R.E.; Gallien, T.W.; Giddings, S.N.; Guza, R.T.; Hayvey, M.; Lenain, L.; Ludka, B.C.; Melville, W.L.; O’Reilly, W.C. Southern California Coastal Response to the 2015-16 El Niño. J. Geophys. Res. Earth Surf. 2018. under review. [Google Scholar]
- Nolan, J.; Eckels, R.; Olsen, M.J.; Yen, K.S.; Lasky, T.A.; Ravani, B. Analysis of the Multipass Approach for Collection and Processing of Mobile Laser Scan Data. J. Surv. Eng. 2017, 143, 04017004. [Google Scholar] [CrossRef]
- Cunningham, K.; Olsen, M.J.; Wartman, J.; Dunham, L. A Platform for Proactive, Risk-Based Slope Asset Management, Phase II; Pactrans Report 2013-M-UAF-0042; Pacific Northwest Transportation Consortium: Seattle, WA, USA, 2015. [Google Scholar]
- Usery, E.L.; Finn, M.P.; Scheidt, D.J.; Ruhl, S.; Beard, T.; Bearden, M. Geospatial data resampling and resolution effects on watershed modeling: A case study using the agricultural non-point source pollution model. J. Geogr. Syst. 2004, 6, 289–306. [Google Scholar] [CrossRef]
- Ball, G.H.; Hall, D.J. ISODATA, A Novel Method of Data Analysis and Pattern Classification; Standford Research Institutie: Melon Park, CA, USA, 1965; Volume 699. [Google Scholar]
- Vázquez-Tarrío, D.; Borgniet, L.; Liébault, F.; Recking, A. Using UAS optical imagery and SfM photogrammetry to characterize the surface grain size of gravel bars in a braided river (Vénéon River, French Alps). Geomorphology 2017, 285, 94–105. [Google Scholar] [CrossRef]
- Anthony, E.J. Sediment-wave parametric characterization of beaches. J. Coast. Res. 1998, 14, 347–352. [Google Scholar]
- Scott, T.; Masselink, G.; Russell, P. Morphodynamic characteristics and classification of beaches in England and Wales. Mar. Geol. 2011, 286, 1–20. [Google Scholar] [CrossRef]
- Mason, T.; Coates, T.T. Sediment Transport Processes on Mixed Beaches: A Review for Shoreline Management. J. Coast. Res. 2001, 17, 645–657. [Google Scholar]
- Quick, M.C. Onshore-offshore sediment transport on beaches. Coast. Eng. 1991, 15, 313–332. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Tool | Remotely Sensed Data | Data Property | Data Resolution | Mapping Technique | Sediment Type (Size) | References |
|---|---|---|---|---|---|---|
| Multiple video cameras | Digital imagery | - | - | Manual mapping | Sands to coarse sediments (1~3 m) | [26,27] |
| UAV | Digital imagery | - | 7.5 mm | Manual mapping | Coarse sediments (>75 mm) | [28] |
| Single camera | Digital imagery | (Grayscaled) image intensity | 2.5–7.9 × 10−2 mm | Autocorrelation | Sands to coarse sediments (<~20 mm) | [30,31] |
| Airborne | Hyperspectral imagery | Return signal spectrum | 2 m | Raster classification | Fine to coarse sands containing shells and gravels | [35,36] |
| Airborne | LiDAR point cloud | LiDAR intensity, topographic roughness and luminance | 2 m | Raster classification | Cobbles (to bedrock) | [37] |
| Airborne | LiDAR point cloud | LiDAR intensity, topographic roughness, kurtosis and skewness | 2–4 m | Raster classification | (Under water) fine sands, cobble/boulder (>256 mm) and bedrock | [38] |
| Terrestrial (static) | LiDAR point cloud | LiDAR RGB color, topographic roughness | 0.1 m | Artificial neural network grouping (RGB color) | Sands to gravels (49 1 mm) | [39] |
| UAV | Digital imagery, and SfM point cloud | Image texture, and topographic roughness | 1–5 cm | Correlation analysis of grain size and negative entropy/roughness | Cobbles to boulders | [40] 2 |
| Item | Setting |
|---|---|
| Laser pulse frequency | 550,000 Hz |
| Ranging precision | 5 mm |
| Multi-target detection | Applied |
| Online waveform processing | Applied |
| Scan mode | Line scan |
| Scanner height from the ground | 2.5–2.6 m |
| Grazing scan angle range on beach surface | 1.5–40° |
| Classifier | Parameter | Settings |
|---|---|---|
| DT | Maximum number of splits | 4 |
| Split criterion | Gini’s diversity index | |
| SVM | Kernel function | Gaussian |
| Kernel scale | 0.56 | |
| Box constraint level | 1 | |
| Multiclass method | One-vs-One | |
| KNN | Number of Neighbors | 10 |
| Distance metric | Euclidean |
| Survey | Minimum | Maximum | Mean |
|---|---|---|---|
| October 2017 | 0.0% | 68% | 2.2 ± 0.3% |
| March 2018 | 0.0% | 80% | 7.9 ± 1.0% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsumoto, H.; Young, A.P. Automated Cobble Mapping of a Mixed Sand-Cobble Beach Using a Mobile LiDAR System. Remote Sens. 2018, 10, 1253. https://doi.org/10.3390/rs10081253
Matsumoto H, Young AP. Automated Cobble Mapping of a Mixed Sand-Cobble Beach Using a Mobile LiDAR System. Remote Sensing. 2018; 10(8):1253. https://doi.org/10.3390/rs10081253
Chicago/Turabian StyleMatsumoto, Hironori, and Adam P. Young. 2018. "Automated Cobble Mapping of a Mixed Sand-Cobble Beach Using a Mobile LiDAR System" Remote Sensing 10, no. 8: 1253. https://doi.org/10.3390/rs10081253
APA StyleMatsumoto, H., & Young, A. P. (2018). Automated Cobble Mapping of a Mixed Sand-Cobble Beach Using a Mobile LiDAR System. Remote Sensing, 10(8), 1253. https://doi.org/10.3390/rs10081253