Generic and Automatic Markov Random Field-Based Registration for Multimodal Remote Sensing Image Using Grayscale and Gradient Information

Abstract
1. Introduction
- (1)
- We propose a generic and automatic registration framework for multiple multimodal remote sensing images which significantly improves registration accuracy.
- (2)
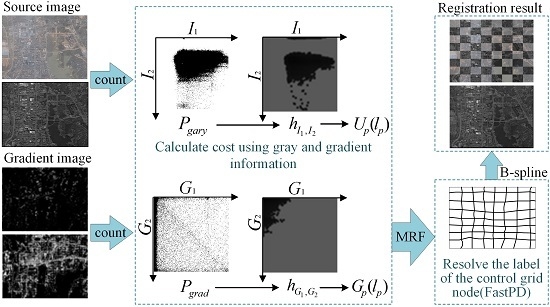
- Compared with other methods, the proposed approach considers both the grayscale and gradient statistical information of images, which is used for similarity measures of data-specific energy term, hence to possess stronger robustness for the registration of multiple heterogeneous remote sensing images and target scenes.
- (3)
- It can be noted that the contribution of the spatial weight function to the registration energy should be considered. We employed the Gaussian function method, which can overcome the discontinuity of the spatial weight function and hence to further improve registration accuracy.
2. Materials and Methods
2.1. Uniform Grid Division of Control Point and Cost Calculation
2.2. B-Spline Elastic Deformation Model
3. Experiments and Results
3.1. Descriptions of Experimental Data
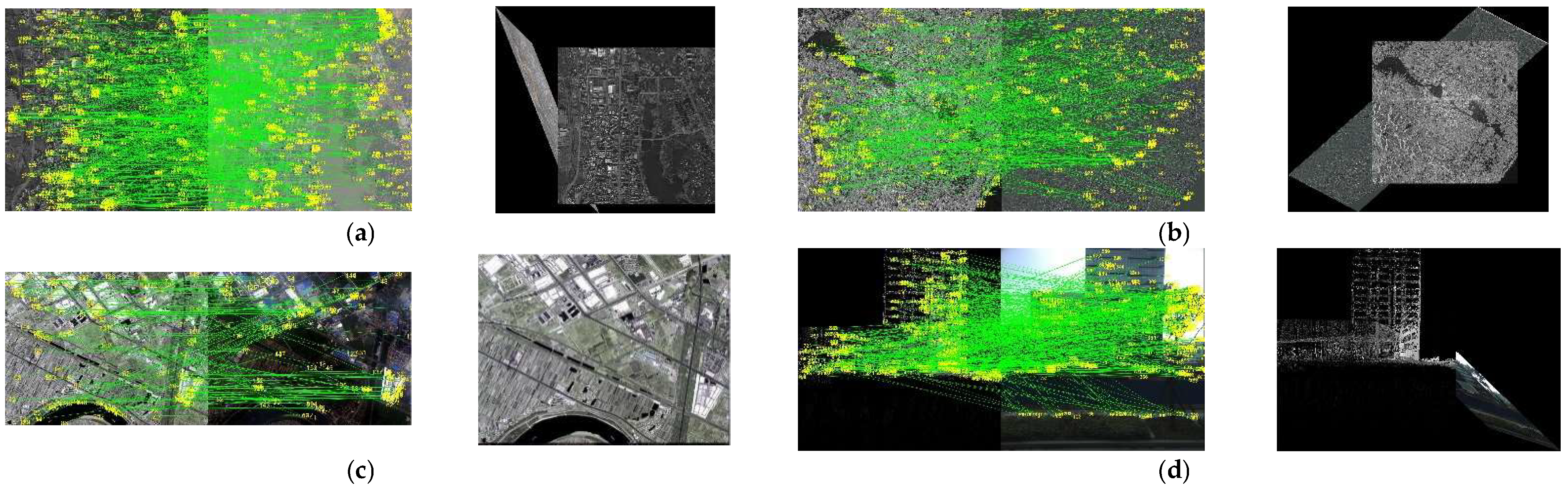
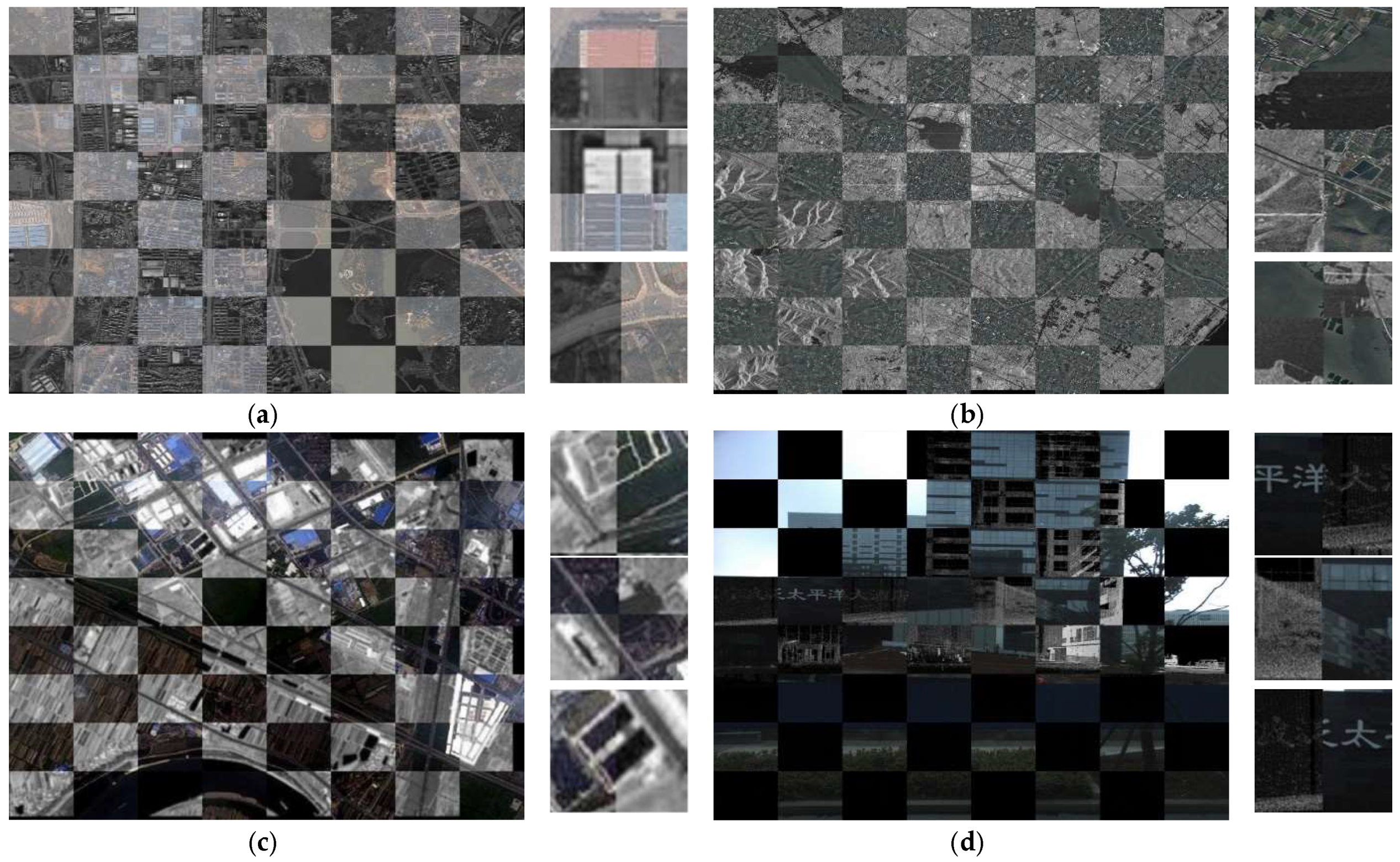
3.2. Multimodal Image Registration
3.2.1. Experimental Setup
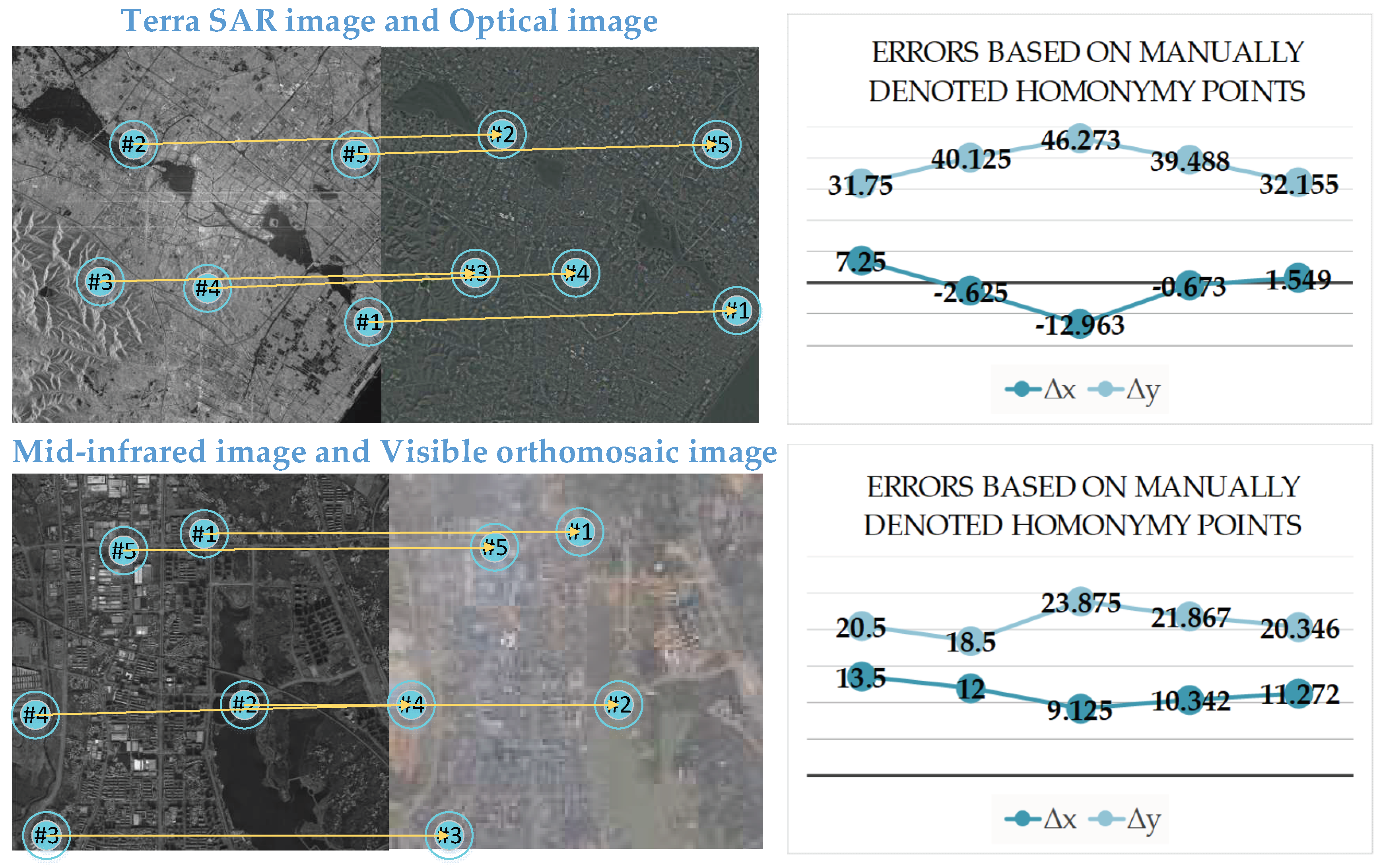
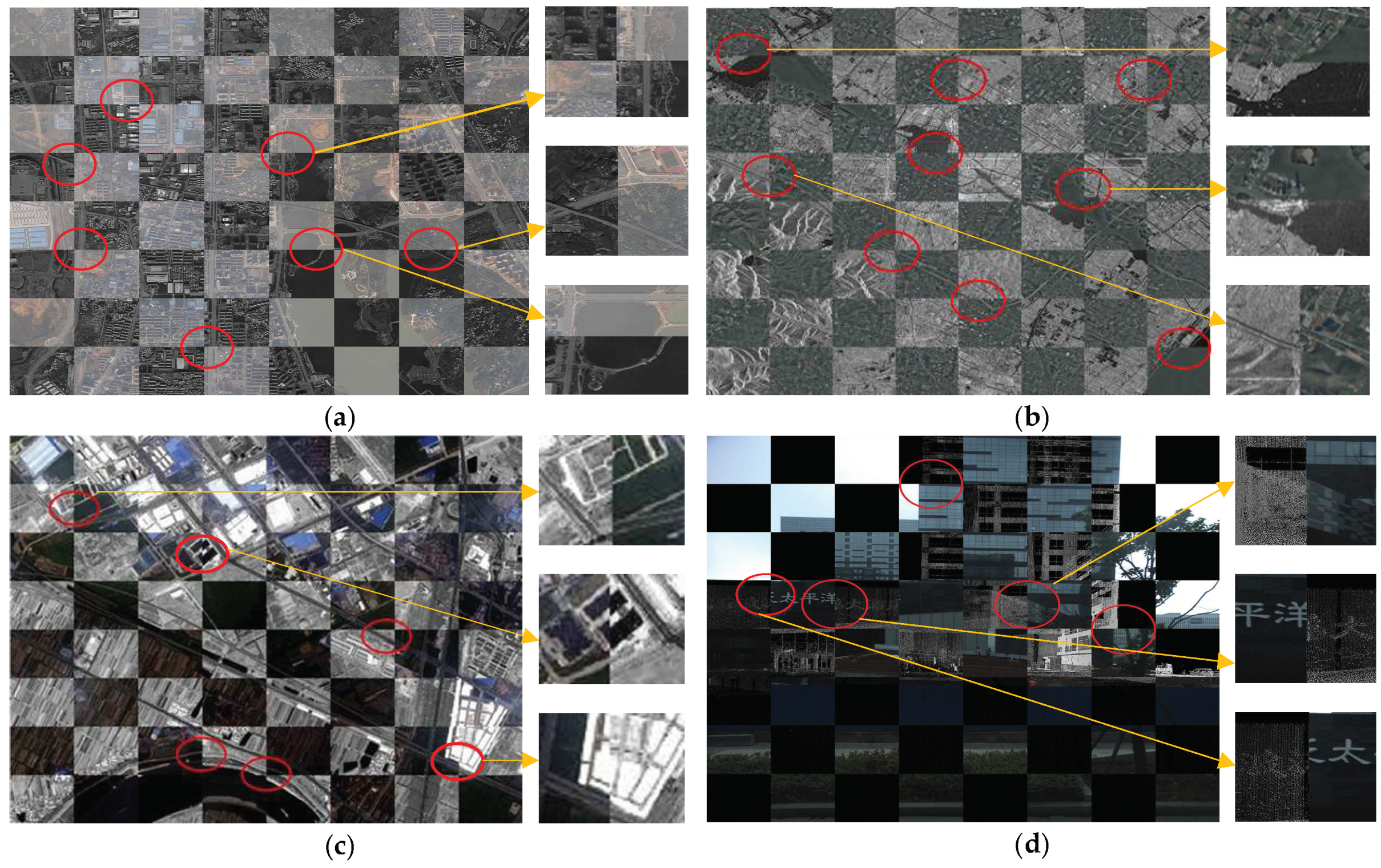
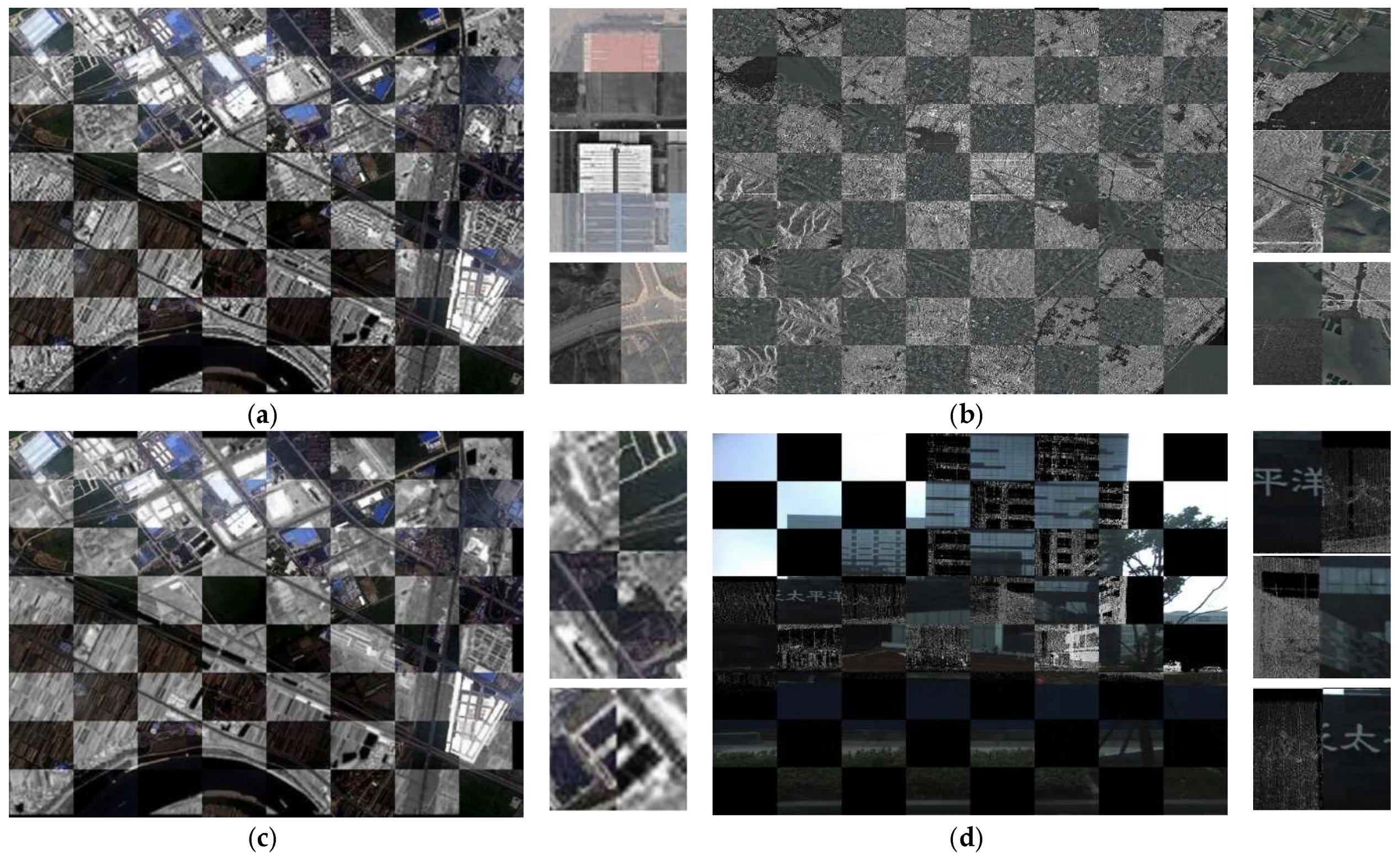
3.2.2. Experimental Results and Evaluation
3.3. Multimodal Image Registration of Large Deformation
4. Discussion
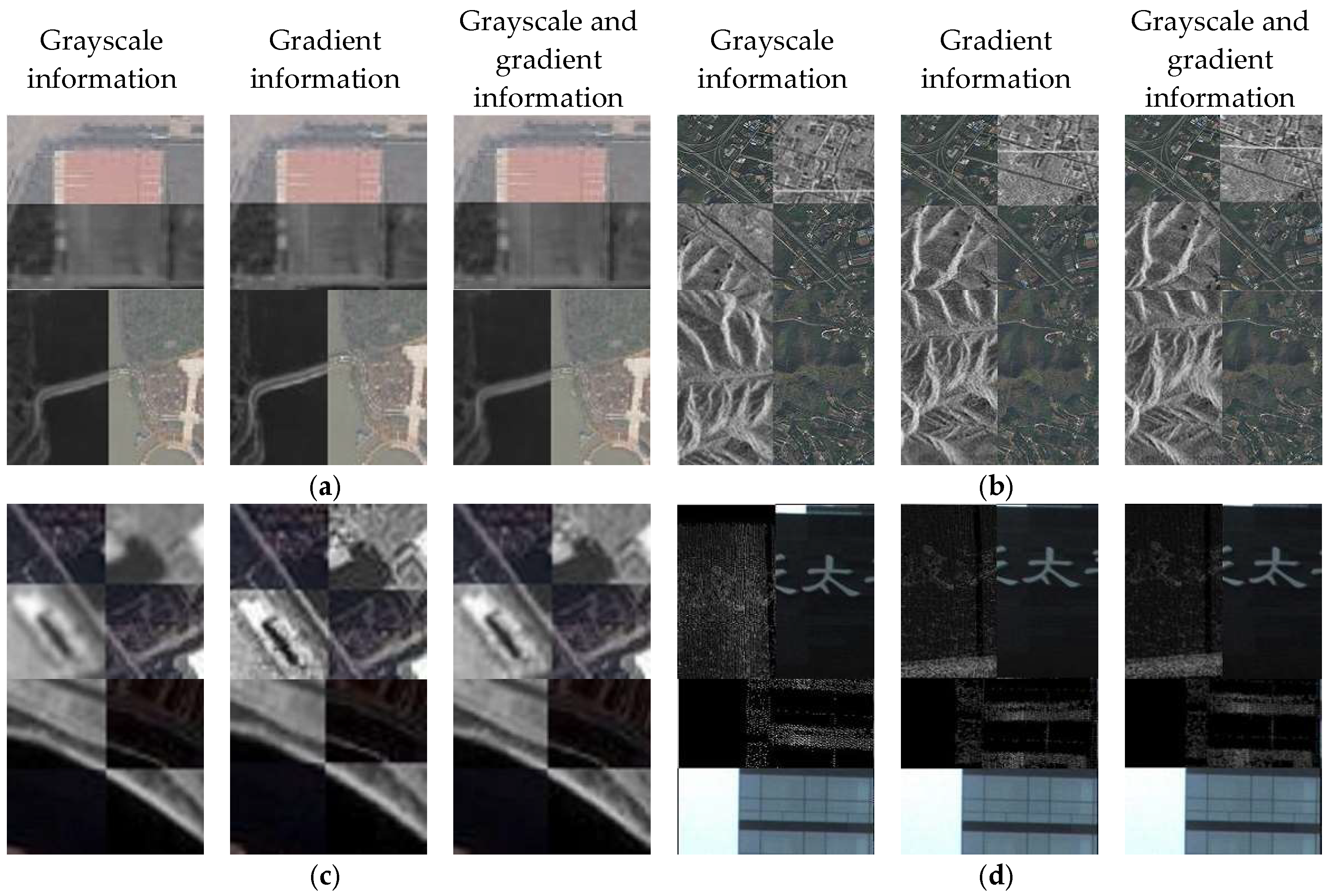
4.1. Accuracy Improvements from Gradient Information
4.2. Accuracy Improvements from the Spatial Weighting Function η
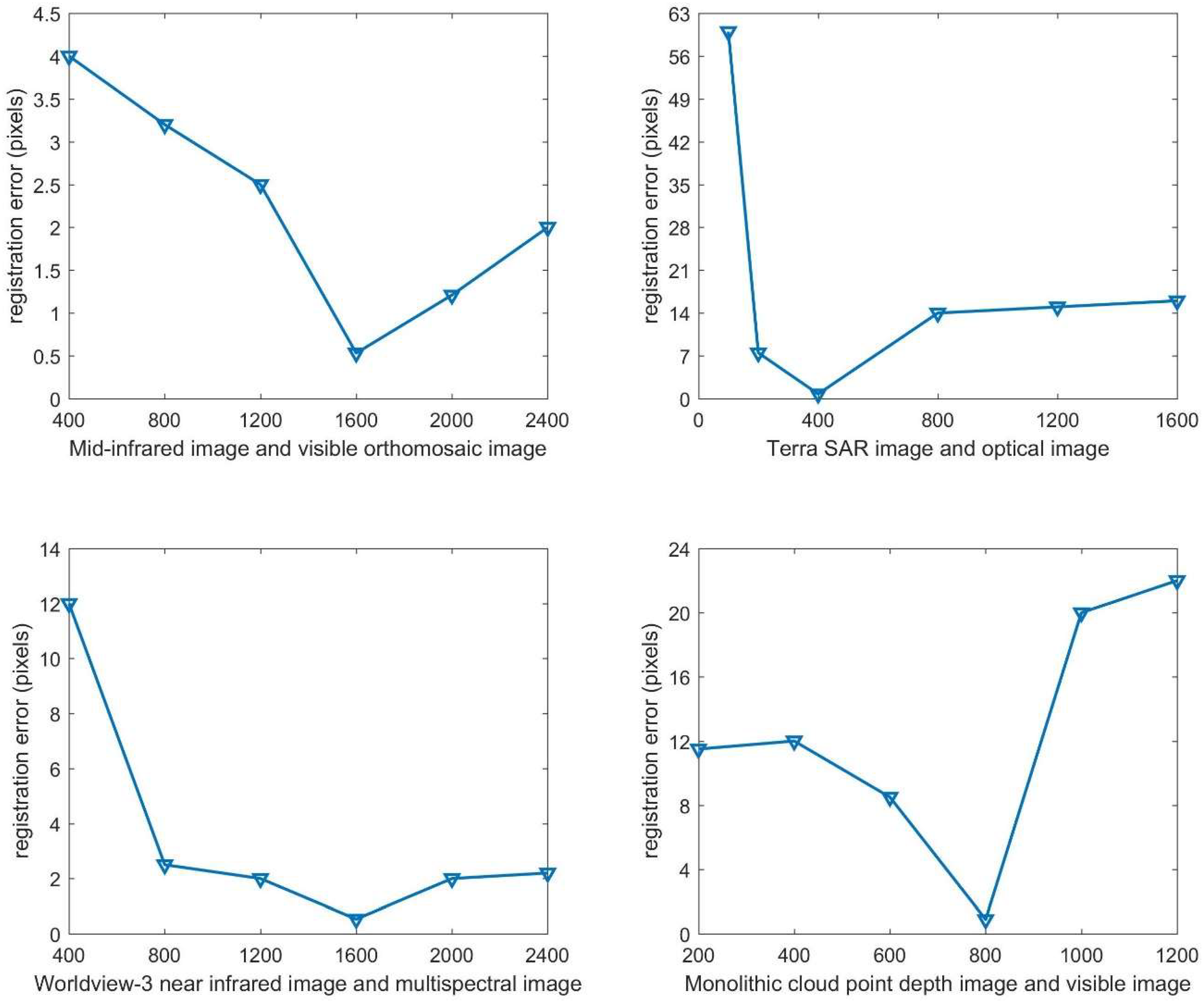
4.3. Influence of the Weight of the Regular Term λ
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Liu, J.; Gong, M.; Qin, K.; Zhang, P. A Deep Convolutional Coupling Network for Change Detection Based on Heterogeneous Optical and Radar Images. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 545–559. [Google Scholar] [CrossRef] [PubMed]
- Bongiorno, D.L.; Bryson, M.; Bridge, T.C.L.; Dansereau, D.G.; Williams, S.B. Coregistered Hyperspectral and Stereo Image Seafloor Mapping from an Autonomous Underwater Vehicle. J. Field Robot. 2017. [Google Scholar] [CrossRef]
- Sakamoto, Y.; Kuwahara, T.; Yoshida, K. HPT: A High Spatial Resolution Multispectral Sensor for Microsatellite Remote Sensing. Sensors 2018, 18, 619. [Google Scholar] [CrossRef]
- Guo-Qiang, N.I.; Liu, Q. Analysis and prospect of multi-source image registration techniques. Opto-Electron. Eng. 2004, 31, 1–6. [Google Scholar]
- Brown, L.G. A Survey of Image Registration Techniques. ACM Comput. Surv. 1999, 24, 325–376. [Google Scholar] [CrossRef]
- Fan, B.; Huo, C.; Pan, C.; Kong, Q. Registration of Optical and SAR Satellite Images by Exploring the Spatial Relationship of the Improved SIFT. IEEE Geosci. Remote Sens. Lett. 2013, 10, 657–661. [Google Scholar] [CrossRef]
- Li, H.; Manjunath, B.S.; Mitra, S.K. A contour-based approach to multisensor image registration. IEEE Trans. Image Process. 1995, 4, 320–334. [Google Scholar] [CrossRef] [PubMed]
- Li, H.H.; Zhou, Y.T. Automatic visual/IR image registration. Opt. Eng. 1996, 35, 391–400. [Google Scholar] [CrossRef]
- Zhang, Q. Automatic registration of aerophotos based on SUSAN operator. Sci. Surv. Map. 2006, 32, 60–63. [Google Scholar]
- Kelman, A.; Sofka, M.; Stewart, C.V. Keypoint Descriptors for Matching Across Multiple Image Modalities and Non-linear Intensity Variations. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Minneapolis, MN, USA, 17–22 June 2007; pp. 1–7. [Google Scholar]
- Kovesi, P. Image Features From Phase Congruency. J. Comput. Vis. Res. 1999, 1, 115–116. [Google Scholar]
- Wong, A.; Clausi, D.A. AISIR: Automated inter-sensor/inter-band satellite image registration using robust complex wavelet feature representations. Pattern Recogn. Lett. 2010, 31, 1160–1167. [Google Scholar] [CrossRef]
- Nan, L.; Sun, Q.; Geng, L.; Hui, L.I. An Extended SURF Descriptor and Its Application in Remote Sensing Images Registration. Acta Geod. Cartogr. Sin. 2013, 42, 383–388. [Google Scholar]
- Collignon, A. Automated multi-modality image registration based on information theory. In Information Processing in Medical Imaging; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1995; pp. 263–274. [Google Scholar]
- Maes, F.; Collignon, A.; Vandermeulen, D.; Marchal, G.; Suetens, P. Multimodality image registration by maximization of mutual information. IEEE Trans. Med. Imaging 1997, 16, 187–198. [Google Scholar] [CrossRef] [PubMed]
- Viola, P.; Iii, W.M.W. Alignment by maximization of mutual information. Int. J. Comput. Vis. 1997, 24, 137–154. [Google Scholar] [CrossRef]
- Studholme, C.; Hill, D.L.G.; Hawkes, D.J. An overlap invariant entropy measure of 3D medical image alignment. Pattern Recogn. 1999, 32, 71–86. [Google Scholar] [CrossRef]
- Rueckert, D. Non-rigid registration using higher-order mutual information. Proc. SPIE Int. Soc. Opt. Eng. 2000, 3979, 438–447. [Google Scholar]
- Russakoff, D.B.; Tomasi, C.; Rohlfing, T.; Maurer, C.R. Image Similarity Using Mutual Information of Regions. In Proceedings of the Computer Vision—ECCV 2004, European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; pp. 596–607. [Google Scholar]
- Tomaževič, D.; Likar, B.; Pernuš, F. Multi-feature mutual information image registration. Image Anal. Stereol. 2012, 31, 43–53. [Google Scholar]
- Wang, F.; Vemuri, B.C. Non-Rigid Multi-Modal Image Registration Using Cross-Cumulative Residual Entropy. Int. J. Comput. Vis. 2007, 74, 201–215. [Google Scholar] [CrossRef] [PubMed]
- Fan, X.; Rhody, H.; Saber, E. Automatic registration of multisensor airborne imagery. In Proceedings of the 34th Applied Imagery and Pattern Recognition Workshop (AIPR’05), Washington, DC, USA, 19 October–21 December 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 12, pp. 6–86. [Google Scholar]
- Li, Y.; Zhenling, M.A. An Operator of Gradient Consistency for Multimodal Image Registration. Wuhan Daxue Xuebao (Xinxi Kexue Ban)/Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 969–972. [Google Scholar]
- Heinrich, M.P.; Jenkinson, M.; Bhushan, M.; Matin, T.; Gleeson, F.V.; Brady, S.M.; Schnabel, J.A. MIND: Modality independent neighbourhood descriptor for multi-modal deformable registration. Med. Image Anal. 2012, 16, 1423–1435. [Google Scholar] [CrossRef] [PubMed]
- Ye, Y.; Shan, J.; Peng, J.; Xiong, J.; Li, W. Automated multispectral remote sensing image registration using local self-similarity. Acta Geod. Cartogr. Sin. 2014, 43, 268–275. [Google Scholar]
- Pluim, J.P.W.; Maintz, J.; Viergever, M.A. Image registration by maximization of combined mutual information and gradient information. IEEE Trans. Med. Imaging 2002, 19, 809–814. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Lu, C.C. Multi-modality Image Registration Using Mutual Information Based on Gradient Vector Flow. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; IEEE: Piscataway, NJ, USA, 2006; Volume 3, pp. 277–284. [Google Scholar]
- Yong, S.K.; Lee, J.H.; Ra, J.B. Multi-Sensor Image Registration Based on Intensity and Edge Orientation Information; Elsevier Science Inc.: New York, NY, USA, 2008; pp. 3356–3365. [Google Scholar]
- Lee, J.H.; Yong, S.K.; Lee, D.; Kang, D.G.; Ra, J.B. Robust CCD and IR Image Registration Using Gradient-Based Statistical Information. IEEE Signal Proc. Lett. 2010, 17, 347–350. [Google Scholar]
- Karantzalos, K.; Sotiras, A.; Paragios, N. Efficient and Automated Multimodal Satellite Data Registration through MRFs and Linear Programming. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 335–342. [Google Scholar]
- Platias, C.; Vakalopoulou, M.; Karantzalos, K. Automatic mrf-based registration of high resolution satellite video data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-1, 121–128. [Google Scholar] [CrossRef]
- Yan, D.Q.; Liu, C.F.; Liu, S.L.; Liu, D.S. A Fast Image Registration Algorithm for Diffeomorphic Image with Large Deformation. Acta Autom. Sin. 2015, 41, 1461–1470. [Google Scholar]
- Komodakis, N.; Tziritas, G. Approximate labeling via graph cuts based on linear programming. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1436–1453. [Google Scholar] [CrossRef] [PubMed]
- Komodakis, N.; Tziritas, G.; Paragios, N. Performance VS. Computational Efficiency for Optimizing Single and Dynamic MRFs: Setting the State of the Art with Primal-Dual Strategies; Elsevier Science Inc.: New York, NY, USA, 2008; pp. 14–29. [Google Scholar]
- Strekalovskiy, E.; Cremers, D. Real-Time Minimization of the Piecewise Smooth Mumford-Shah Functional; Springer: Berlin, Germany, 2014; pp. 127–141. [Google Scholar]
- Hirschm, H. Stereo Processing by Semiglobal Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Kolmogorov, V.; Zabih, R. Visual correspondence using energy minimization and mutual information. In Proceedings of the IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 1033–1040. [Google Scholar]
- Choi, Y.; Lee, S. Injectivity Conditions of 2D and 3D Uniform Cubic B-Spline Functions. Graph. Models 2000, 62, 411–427. [Google Scholar] [CrossRef]
- Li, X.; Zheng, L.; Hu, Z. SIFT based automatic registration of remotely-sensed imagery. J. Remote Sens. 2006, 10, 885–892. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Image Type | Image Size | Image Introduction | Maximum Parallax/Average Parallax |
|---|---|---|---|---|
| 1 | Mid-infrared image | 2048 * 2048 | Aerial image in Daye city of Hubei province | 13 pixels/17 pixels |
| Visible orthomosaic image | 2048 * 2048 | |||
| 2 | Terra SAR image | 2048 * 2048 | Changzhou City, Jiangsu Province, satellite survey area | 48 pixels/23 pixels |
| Optical image | 2048 * 2048 | |||
| 3 | Worldview-3 near infrared image | 1536 * 2048 | Wuhan City, Hubei Province, East and West Lake survey satellite imagery | 29 pixels/10 pixels |
| Worldview-3 multispectral image | 1536 * 2048 | |||
| 4 | Monolithic cloud point depth image | 2048 * 2048 | Wuhan City, vehicle-borne mobile image | 21 pixels/17 pixels |
| Monolithic visible image | 2048 * 2048 |
| Multimodal Dataset | Optimal Parameter Settings |
|---|---|
| Mid-infrared image and visible orthomosaic image | λ = 800, η = Gaussian function method. |
| Terra SAR image and optical image | λ = 400, η = Gaussian function method. |
| Worldview-3 near infrared image and multispectral image | λ = 1600, η = Gaussian function method. |
| Monolithic cloud point depth image and visible image | λ = 800, η = Gaussian function method. |
| Multimodal Dataset | Experimental Method | dx (pixels) | dy (pixels) | D (pixels) | dx_max (pixels) | dy_max (pixels) |
|---|---|---|---|---|---|---|
| Mid-infrared image and visible orthomosaic image | Manual selection + Polynomial Model | 2.658 | 3.345 | 4.272 | 3.875 | 4.961 |
| Grayscale and gradient information + MRF | 0.298 | 0.548 | 0.624 | 0.750 | 0.950 | |
| Terra SAR image and optical image | Manual selection + Polynomial Model | 5.771 | −8.961 | 10.658 | 6.520 | −9.414 |
| Grayscale and gradient information + MRF | 0.521 | 0.565 | 0.769 | 0.754 | 0.890 | |
| Worldview-3 near infrared image and multispectral image | Manual selection + Polynomial Model | 3.107 | 4.251 | 5.265 | 4.268 | 6.632 |
| Grayscale and gradient information + MRF | 0.344 | 0.406 | 0.532 | 0.537 | 0.562 | |
| Monolithic cloud point depth image and visible image | Manual selection + Polynomial Model | 4.401 | 3.185 | 5.433 | −5.133 | 9.701 |
| Grayscale and gradient information + MRF | 0.712 | 0.630 | 0.951 | 0.888 | 0.791 |
| Translation Direction | dx (pixels) | dy (pixels) | D (pixels) | dx_max (pixels) | dy_max (pixels) |
|---|---|---|---|---|---|
| x | 0.313 | 0.676 | 0.745 | 0.592 | 0.931 |
| y | 0.693 | 0.635 | 0.940 | 0.963 | 0.813 |
| diagonal | 0.148 | 0.517 | 0.538 | 0.258 | 0.956 |
| Multimodal Dataset | Experimental Method | dx (pixels) | dy (pixels) | D (pixels) | dx_max (pixels) | dy_max (pixels) |
|---|---|---|---|---|---|---|
| Mid-infrared image and visible orthomosaic image | Grayscale information | 0.435 | 0.797 | 0.908 | 1.374 | 1.822 |
| Gradient information | 0.857 | 0.731 | 1.127 | 1.438 | 2.551 | |
| Grayscale and gradient information | 0.298 | 0.548 | 0.624 | 0.750 | 0.950 | |
| Terra SAR image and optical image | Grayscale information | 8..496 | 9.022 | 12.393 | 12.974 | 11.246 |
| Gradient information | 1.015 | 1.336 | 1.678 | 3.160 | 1.731 | |
| Grayscale and gradient information | 0.521 | 0.565 | 0.769 | 0.754 | 0.890 | |
| Worldview-3 near infrared image and multispectral image | Grayscale information | 0.625 | 0.950 | 1.137 | 0.889 | 1.175 |
| Gradient information | 0.749 | 0.749 | 1.060 | 1.398 | 1.836 | |
| Grayscale and gradient information | 0.344 | 0.406 | 0.532 | 0.537 | 0.562 | |
| Monolithic cloud point depth image and visible image | Grayscale information | 1.944 | 5.223 | 5.573 | 5.263 | 7.049 |
| Gradient information | 2.638 | 2.563 | 3.677 | 4.125 | 5.875 | |
| Grayscale and gradient information | 0.712 | 0.630 | 0.951 | 0.888 | 0.791 |
| Multimodal Dataset | Spatial Weight Function | dx (pixels) | dy (pixels) | D (pixels) | dx_max (pixels) | dy_max (pixels) |
|---|---|---|---|---|---|---|
| Mid-infrared image and visible orthomosaic image | Distance inverse | 0.317 | 0.641 | 0.715 | 1.044 | 1.387 |
| Gaussian function | 0.298 | 0.548 | 0.624 | 0.750 | 0.950 | |
| Terra SAR image and optical image | Distance inverse | 0.721 | 0.763 | 1.050 | 1.396 | 1.720 |
| Gaussian function | 0.521 | 0.565 | 0.769 | 0.754 | 0.890 | |
| Worldview-3 near infrared image and multispectral image | Distance inverse | 0.432 | 0.520 | 0.676 | 1.456 | 0.928 |
| Gaussian function | 0.344 | 0.406 | 0.532 | 0.537 | 0.562 | |
| Monolithic cloud point depth image and visible image | Distance inverse | 0.906 | 1.036 | 1.348 | 1.188 | 1.618 |
| Gaussian function | 0.712 | 0.630 | 0.951 | 0.888 | 0.791 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, L.; Wang, Z.; Liu, Y.; Ye, Z. Generic and Automatic Markov Random Field-Based Registration for Multimodal Remote Sensing Image Using Grayscale and Gradient Information. Remote Sens. 2018, 10, 1228. https://doi.org/10.3390/rs10081228
Yan L, Wang Z, Liu Y, Ye Z. Generic and Automatic Markov Random Field-Based Registration for Multimodal Remote Sensing Image Using Grayscale and Gradient Information. Remote Sensing. 2018; 10(8):1228. https://doi.org/10.3390/rs10081228
Chicago/Turabian StyleYan, Li, Ziqi Wang, Yi Liu, and Zhiyun Ye. 2018. "Generic and Automatic Markov Random Field-Based Registration for Multimodal Remote Sensing Image Using Grayscale and Gradient Information" Remote Sensing 10, no. 8: 1228. https://doi.org/10.3390/rs10081228
APA StyleYan, L., Wang, Z., Liu, Y., & Ye, Z. (2018). Generic and Automatic Markov Random Field-Based Registration for Multimodal Remote Sensing Image Using Grayscale and Gradient Information. Remote Sensing, 10(8), 1228. https://doi.org/10.3390/rs10081228