Staring Spotlight TerraSAR-X SAR Interferometry for Identification and Monitoring of Small-Scale Landslide Deformation

Abstract
1. Introduction
2. Data and Test Sites
2.1. Hope Slide
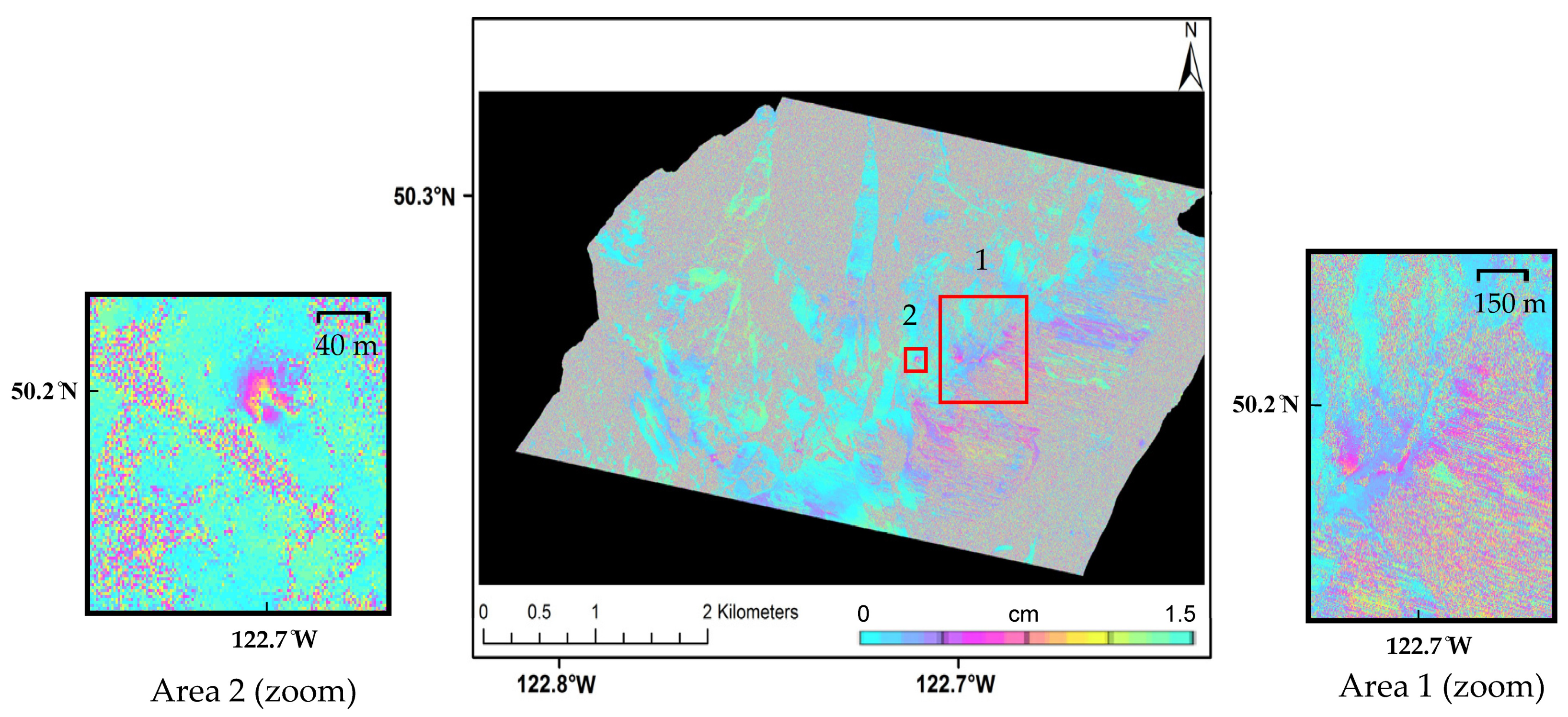
2.2. Mount Currie
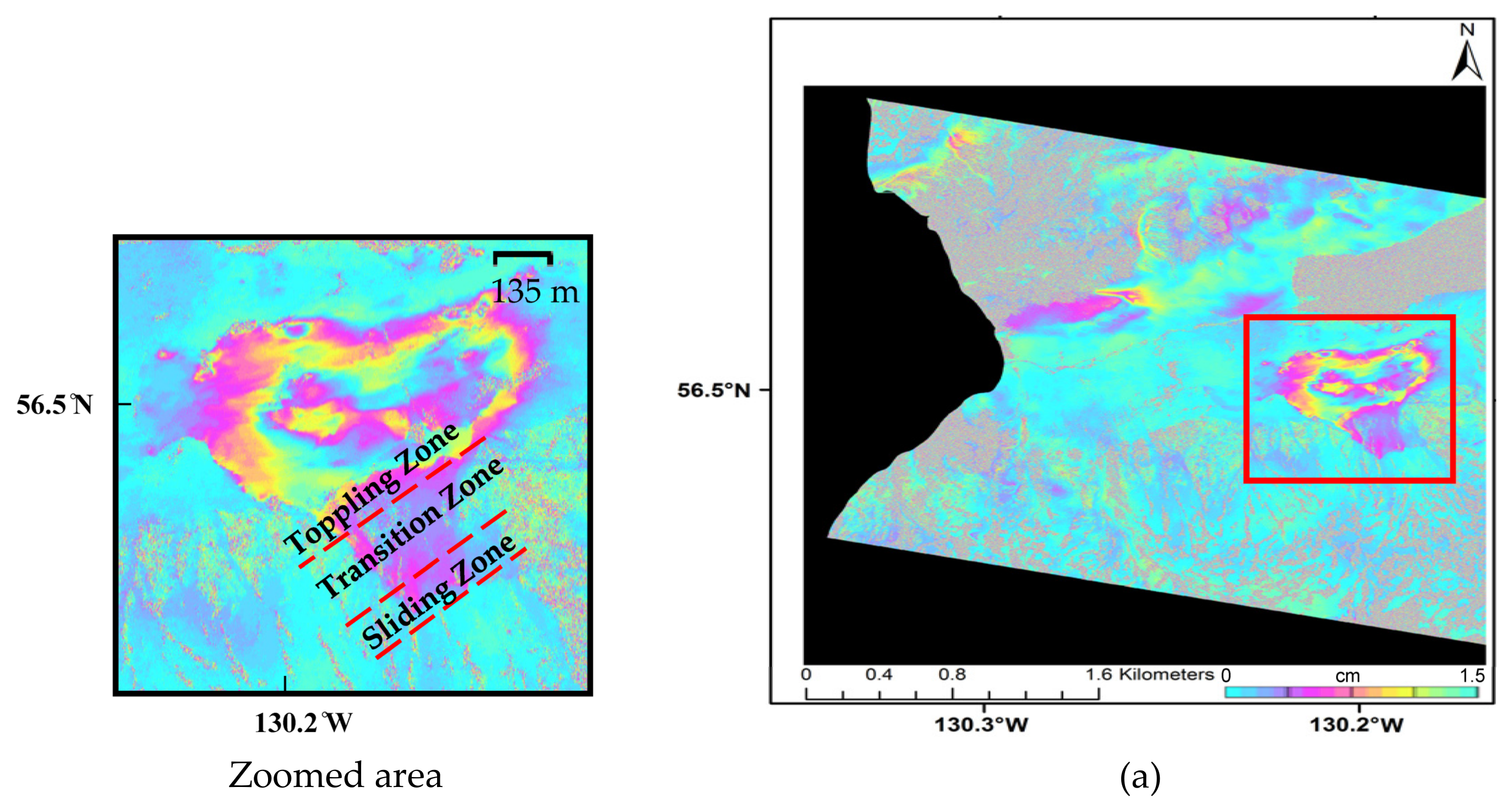
2.3. Boundary Range Slide
3. Methods
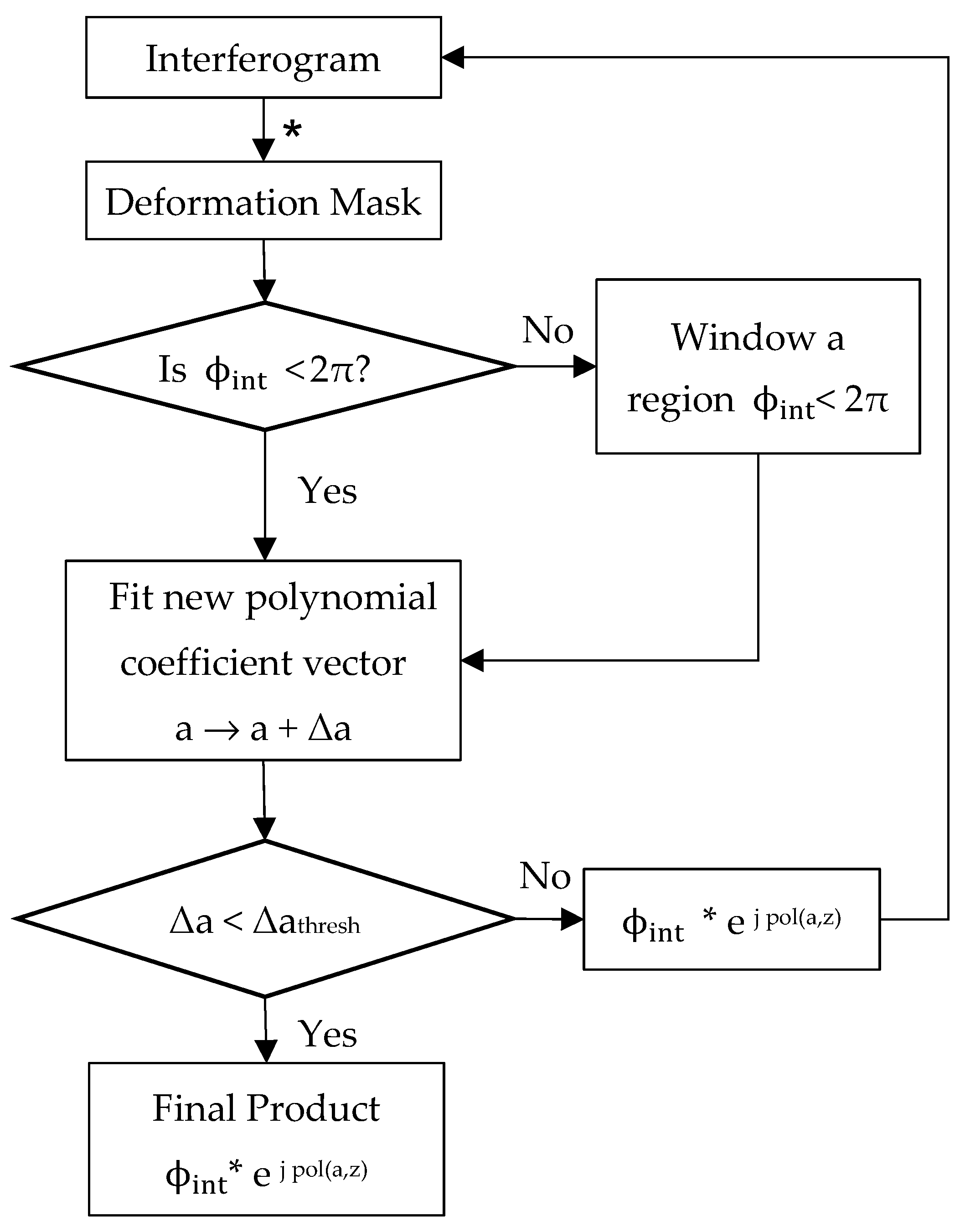
3.1. Atmospheric Phase Correction
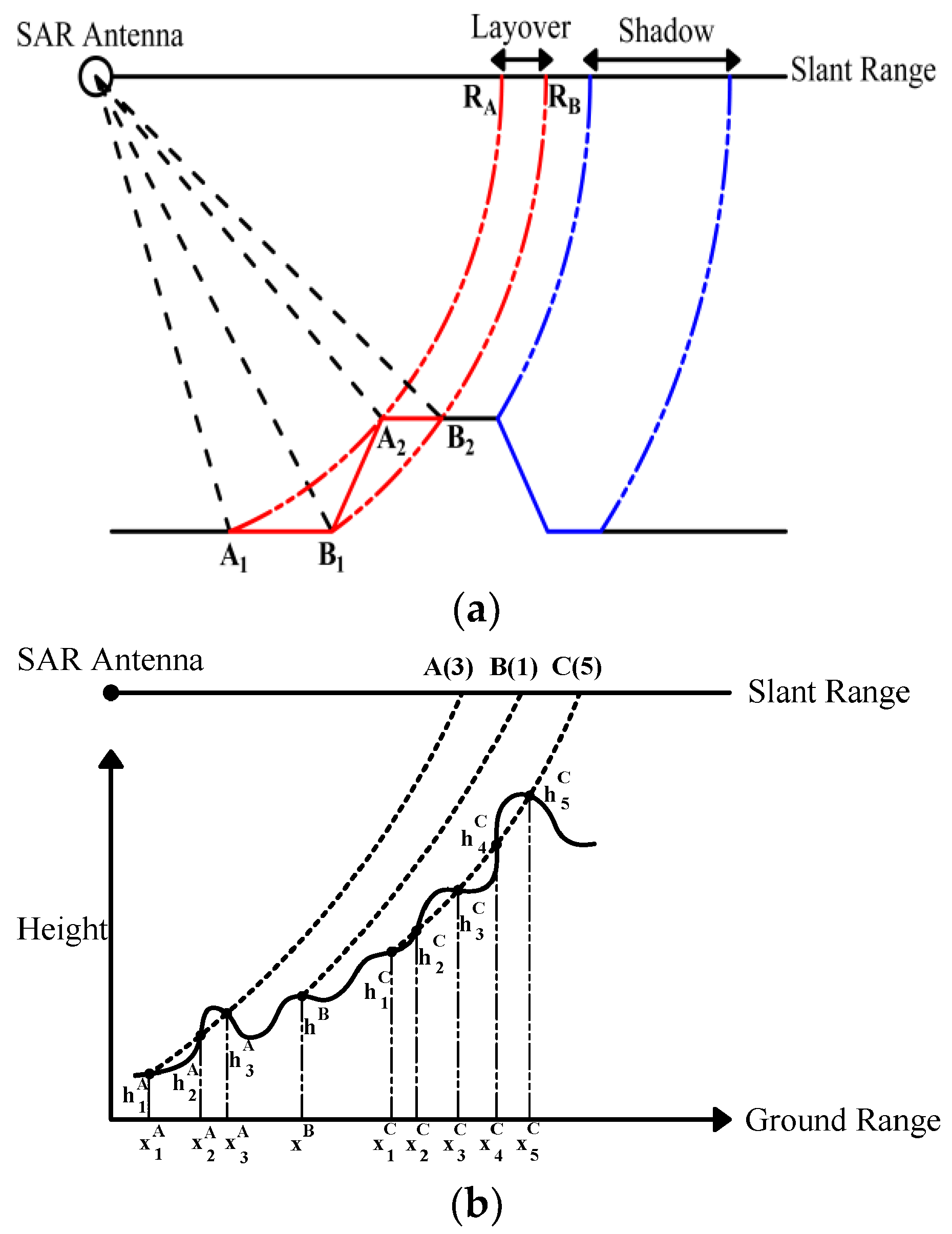
3.2. Layover Topographic Correction Method
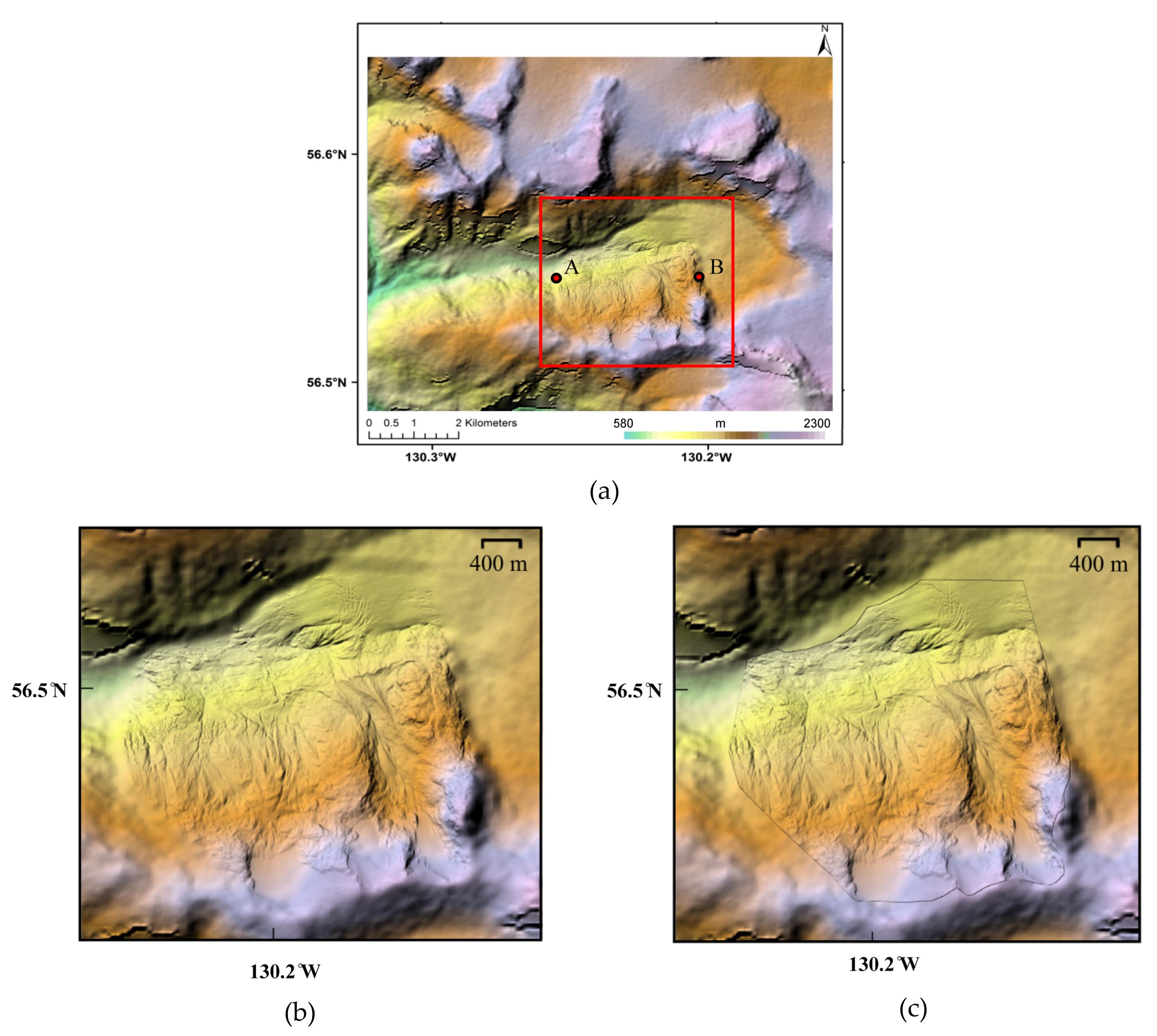
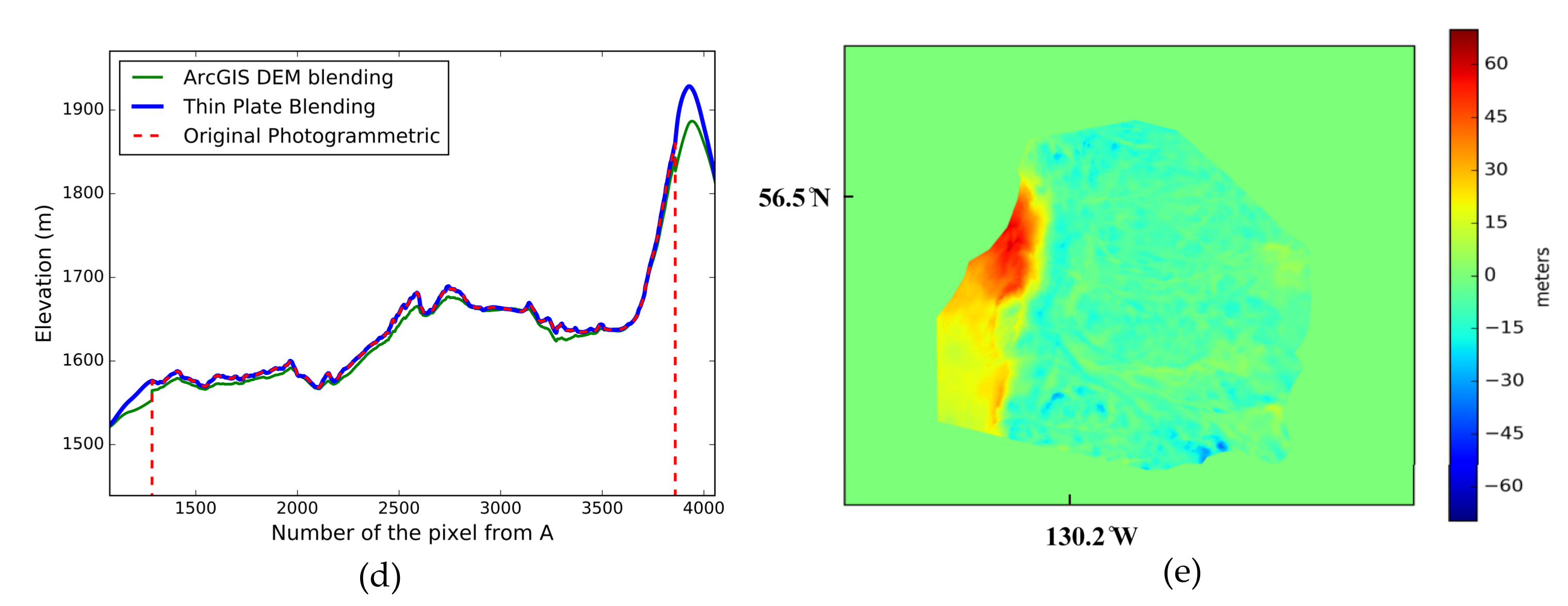
3.3. Digital Surface Model Blending Method
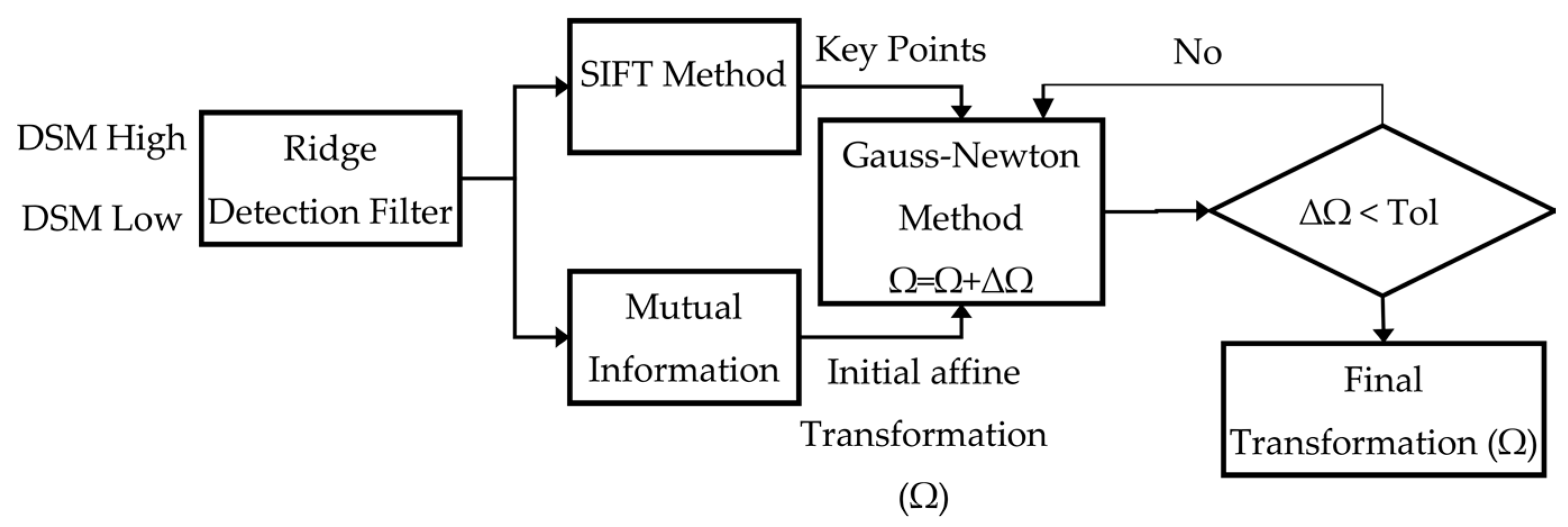
- Step one is to co-register the high- and low-resolution DSM in the overlapping area to find and fix any potential datum issues, elevation offsets, horizontal shifts, or rotations, etc. To do so, for each DSM, we derived feature points along the ridgelines by calculating and thresholding the ratio between the large and the small eigenvalue of the Hessian matrix. Mutual information method [34,35] is used to calculate the initial translation and rotation components of the affine transformation between the two DSMs. To refine, first correspondence between the two sets of feature points is established using the scale-invariant feature transform (SIFT [36]). Based on this feature pair list, the Gauss–Newton method [37] is used to refine the affine transformation parameters iteratively.
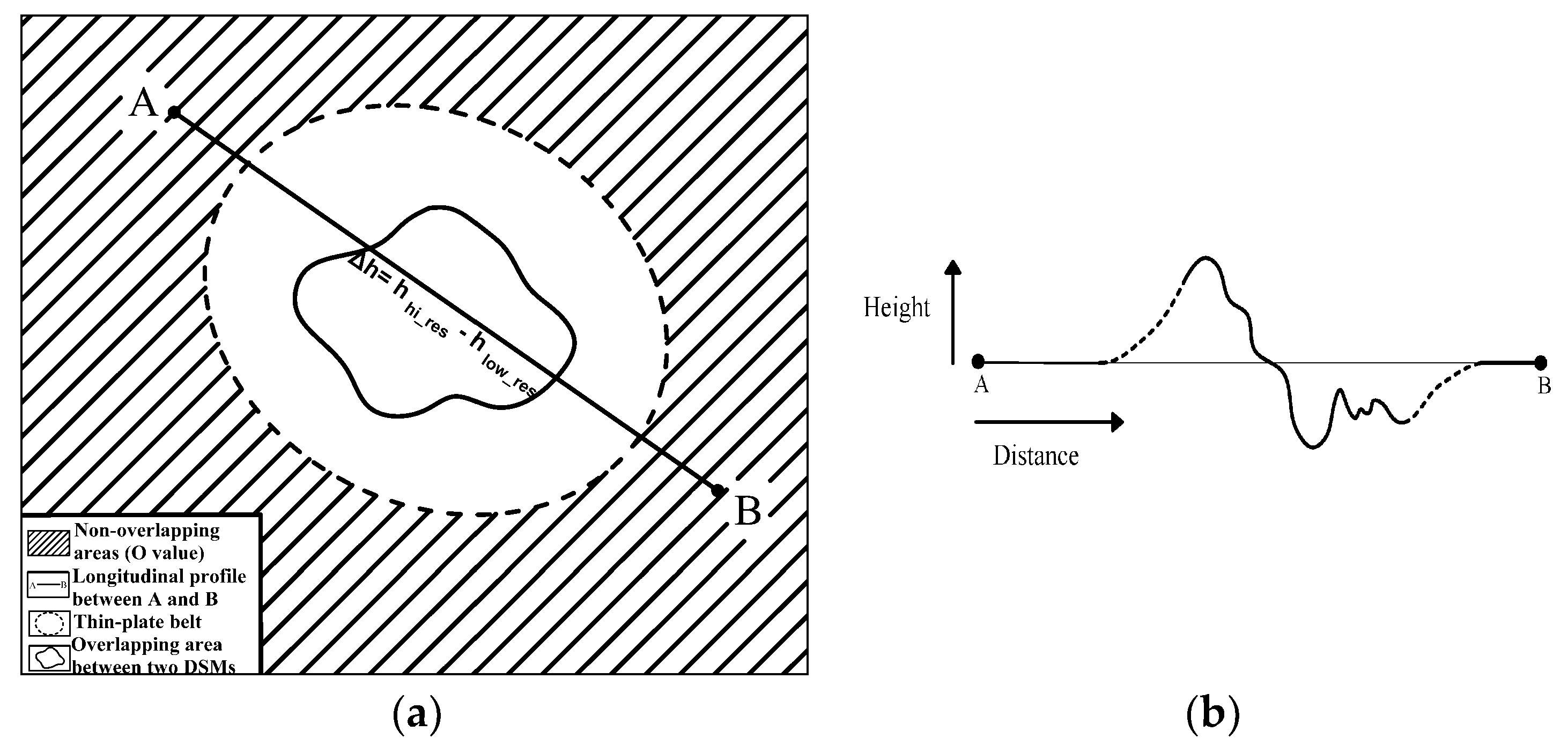
- Step two defines a belt-shaped region of width between 100 to 150 postings of the coarse DSM (Figure 6) surrounding the high-resolution DSM(s). A thin plate spline is then fitted across this belt, with clamped boundary conditions of ∆h = hhighres − hlowres at the inner edge (=boundary of the high-resolution DSM) and 0 at the outer edge of the belt. The result of this fit is a correction surface that is subtracted from the coarse DSM. The so-corrected coarse DSM can then be seamlessly merged with the high-resolution DSM by simply inserting the latter into the former.
4. Results and Discussion
4.1. Hope Slide
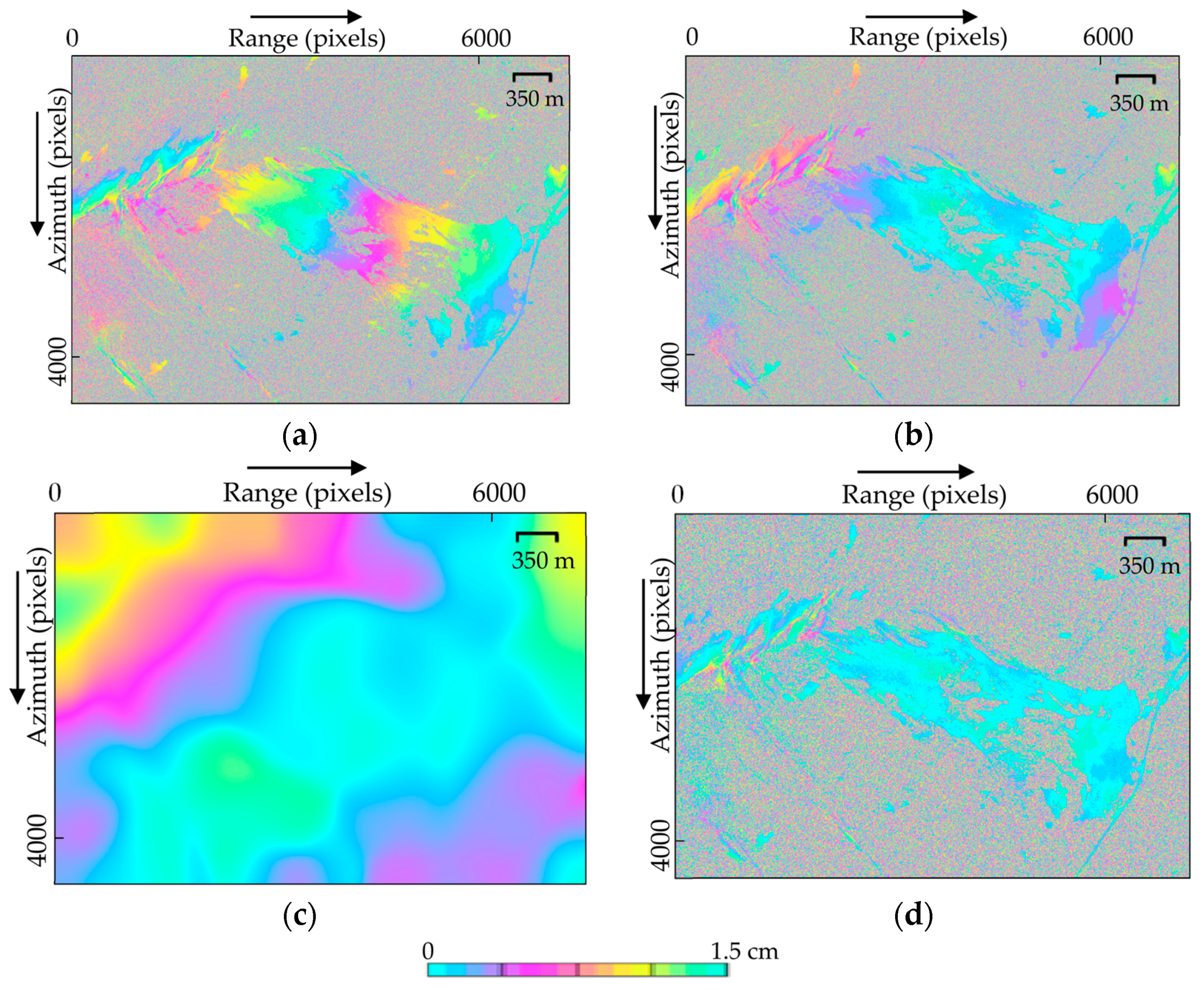
4.1.1. Atmospheric Phase Correction
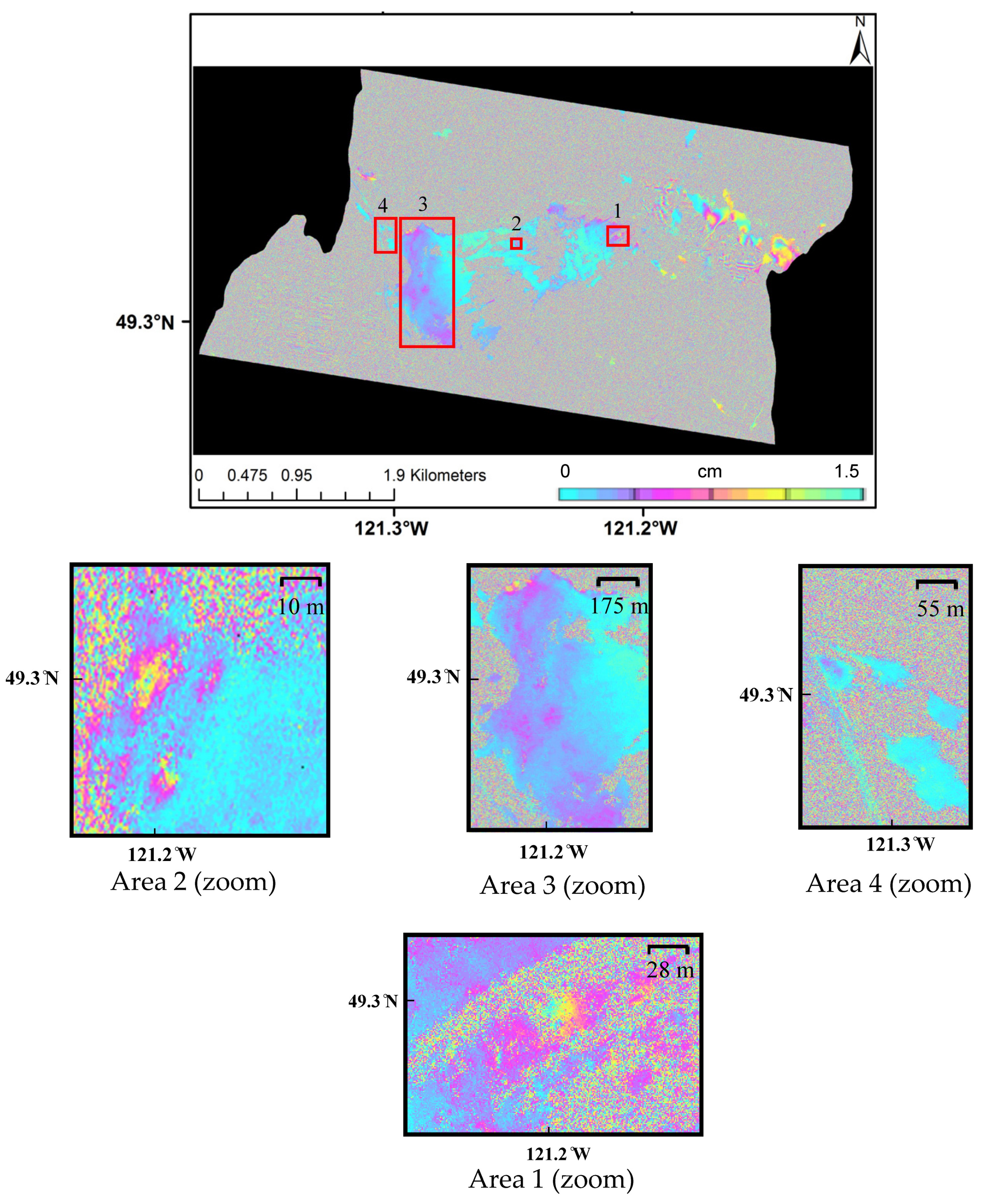
4.1.2. Surface Deformation Map
4.2. Mount Currie
4.2.1. Layover Topographic Correction
4.2.2. Surface Deformation Map
4.3. Boundary Range Slide
4.3.1. Digital Surface Model Blending
4.3.2. Surface Deformation Map
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jakob, M.; Lambert, S. Climate change effects on landslides along the southwest coast of British Columbia. Geomorphology 2009, 107, 275–284. [Google Scholar] [CrossRef]
- Soldati, M.; Corsini, A.; Pasuto, A. Landslides and climate change in the Italian Dolomites since the late glacial. Catena 2004, 55, 141–161. [Google Scholar] [CrossRef]
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar; John Wiley & Sons: New York, NY, USA, 1991; Volume 396. [Google Scholar]
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 14, R1. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. Tandem-x: A satellite formation for high-resolution sar interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef]
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar; Artech House: Norwood, MA, USA, 2007. [Google Scholar]
- Mittermayer, J.; Wollstadt, S.; Prats-Iraola, P.; Scheiber, R. The TerraSAR-X staring spotlight mode concept. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3695–3706. [Google Scholar] [CrossRef]
- Donati, D.; Stead, D.; Brideau, M.; Ghirotti, M. A remote sensing approach for the derivation of numerical modelling input data: Insights from the Hope Slide, Canada. In ISRM AfriRock—Rock Mechanics for Africa; Internation Society for Rock Mechanics and and Rocke Engineering: Cape Town, South Africa, 2017. [Google Scholar]
- Mathews, W.; McTaggart, K. Hope rockslides, British Columbia, Canada. In Developments in Geotechnical Engineering; Elsevier: New York, NY, USA, 1978; Volume 14, pp. 259–275. [Google Scholar]
- Von Sacken, R.S. New Data and Re-Evaluation of the 1965 Hope Slide, British Columbia. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 1991. [Google Scholar]
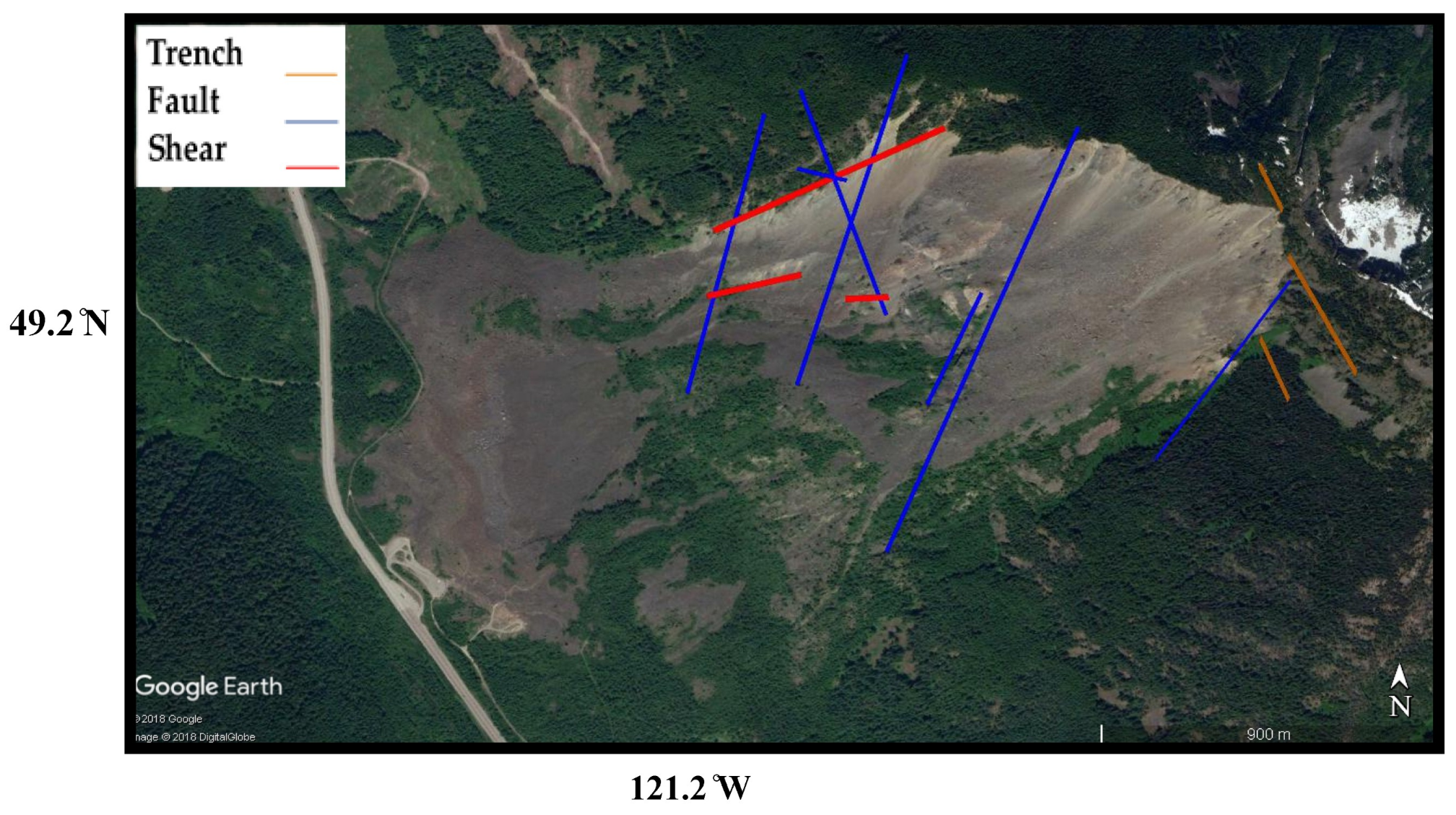
- Brideau, M.-A.; Stead, D.; Kinakin, D.; Fecova, K. Influence of tectonic structures on the Hope Slide, British Columbia, Canada. Eng. Geol. 2005, 80, 242–259. [Google Scholar] [CrossRef]
- Ding, X.-L.; Li, Z.-W.; Zhu, J.-J.; Feng, G.-C.; Long, J.-P. Atmospheric effects on InSAR measurements and their mitigation. Sensors 2008, 8, 5426–5448. [Google Scholar] [CrossRef] [PubMed]
- Bovis, M.J.; Evans, S.G. Rock slope movements along the Mount Currie “fault scarp,” southern coast mountains, British Columbia. Can. J. Earth Sci. 1995, 32, 2015–2020. [Google Scholar] [CrossRef]
- BGC Enginnering Inc. Mount Currie Landslide Risk Assessment; BGC Enginnering Inc.: Vancouver, BC, Canada, 2018. [Google Scholar]
- Clayton, M.; Stead, D.; Kinakin, D. The Mitchell Creek landslide, BC, Canada: Investigation using remote sensing and numerical modeling. In Proceedings of the 47th US Rock Mechanics/Geomechanics Symposium, San Fransisco, CA, USA, 23–26 June 2013. [Google Scholar]
- Clayton, M.A. Characterization and analysis of the Mitchell Creek Landslide: A Large-Scale Rock Slope Instability in Northwestern British Columbia. Ph.D. Thesis, Science: Department of Earth Sciences, Cambridge, UK, 2014. [Google Scholar]
- Clayton, A.; Stead, D.; Kinakin, D.; Wolter, A. Engineering geomorphological interpretation of the Mitchell Creek landslide, British Columbia, Canada. Landslides 2017, 14, 1655–1675. [Google Scholar] [CrossRef]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. Gamma SAR and interferometric processing software. In Proceedings of the ERS-Envisat Symposium, Gothenburg, Sweden, 16–20 October 2000; p. 1620. [Google Scholar]
- Rabus, B.T.; Ghuman, P.S. A simple robust two-scale phase component inversion scheme for persistent scatterer interferometry (dual-scale psi). Can. J. Remote Sens. 2009, 35, 399–410. [Google Scholar] [CrossRef]
- Bekaert, D.; Hooper, A.; Wright, T. A spatially variable power law tropospheric correction technique for insar data. J. Geophys. Res. Solid Earth 2015, 120, 1345–1356. [Google Scholar] [CrossRef]
- Bekaert, D.; Walters, R.; Wright, T.; Hooper, A.; Parker, D. Statistical comparison of InSAR tropospheric correction techniques. Remote Sens. Environ. 2015, 170, 40–47. [Google Scholar] [CrossRef]
- Kwok, R.; Curlander, J.C.; Pang, S.S. Rectification of terrain induced distortions in radar Imagery. Photogramm. Eng. Remote Sens. 1987, 53, 507–513. [Google Scholar]
- Jakowatz, C.V.; Thompson, P. A new look at spotlight mode synthetic aperture radar as tomography: Imaging 3-d targets. IEEE Trans. Image Process. 1995, 4, 699–703. [Google Scholar] [CrossRef] [PubMed]
- Munson, D.C.; O’Brien, J.D.; Jenkins, W.K. A tomographic formulation of spotlight-mode synthetic aperture radar. Proc. IEEE 1983, 71, 917–925. [Google Scholar] [CrossRef]
- Ausherman, D.A.; Kozma, A.; Walker, J.L.; Jones, H.M.; Poggio, E.C. Developments in radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1984, 4, 363–400. [Google Scholar] [CrossRef]
- Mersereau, R.M.; Oppenheim, A.V. Digital reconstruction of multidimensional signals from their projections. Proc. IEEE 1974, 62, 1319–1338. [Google Scholar] [CrossRef]
- Walker, J.L. Range-doppler imaging of rotating objects. IEEE Trans. Aerosp. Electron. Syst. 1980, AES-16, 23–52. [Google Scholar] [CrossRef]
- Bamler, R. Principles of synthetic aperture radar. Surv. Geophys. 2000, 21, 147–157. [Google Scholar] [CrossRef]
- Rabus, B.; Eppler, J.; Sharma, J.; Busler, J. Tunnel monitoring with an advanced insar technique. In Proceedings of the Radar Sensor Technology XVI, International Society for Optics and Photonics, Baltimore, MD, USA, 23–27 April 2012; p. 83611F. [Google Scholar]
- Eppler, J.; Rabus, B. Monitoring urban infrastructure with an adaptive multilooking insar technique. In Proceedings of the Fringe 2011, Frascati, Italy, 19–23 September 2012; p. 68. [Google Scholar]
- Fattahi, H.; Amelung, F. DEM error correction in InSAR time series. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4249–4259. [Google Scholar] [CrossRef]
- Petrasova, A.; Mitasova, H.; Petras, V.; Jeziorska, J. Fusion of high-resolution DEMs for water flow modeling. Open Geospat. Data Softw. Stand. 2017, 2, 6. [Google Scholar] [CrossRef]
- Ormsby, T. Getting to Know Arcgis Desktop: Basics of Arcview, Arceditor, and Arcinfo; ESRI, Inc.: Hong Kong, China, 2004. [Google Scholar]
- Viola, P.; Wells, W.M., III. Alignment by maximization of mutual information. Int. J. Comput. Vis. 1997, 24, 137–154. [Google Scholar] [CrossRef]
- Chen, H.-M.; Arora, M.K.; Varshney, P.K. Mutual information-based image registration for remote sensing data. Int. J. Remote Sens. 2003, 24, 3701–3706. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, T. Gauss-Newton method for DEM co-registration. In Proceedings of theInternational Conference on Intelligent Earth Observing and Applications 2015, Guilin, China, 23–24 October 2015; International Society for Optics and Photonics: Bellingham, WA, USA, 2015; p. 98080M. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Site | Location | Description | Type of Risk | InSAR Observed Phenomena |
|---|---|---|---|---|
| 1. Hope Slide | 121.26°W 49.30°N | Slide scar (1965 landslide) | Unstable steep scar, major highway nearby | Strong deformation gradient near the headscarp. Evidence of rockfalls near sheer zone. Subtle movement in the accumulation zone. Deforming patch near the highway. |
| 2. Mount Currie | 122.78°W 50.25°N | Steep mountain ridge | Rockfall events, precursors to catastrophic landslide | Deformation near main tension cracks. |
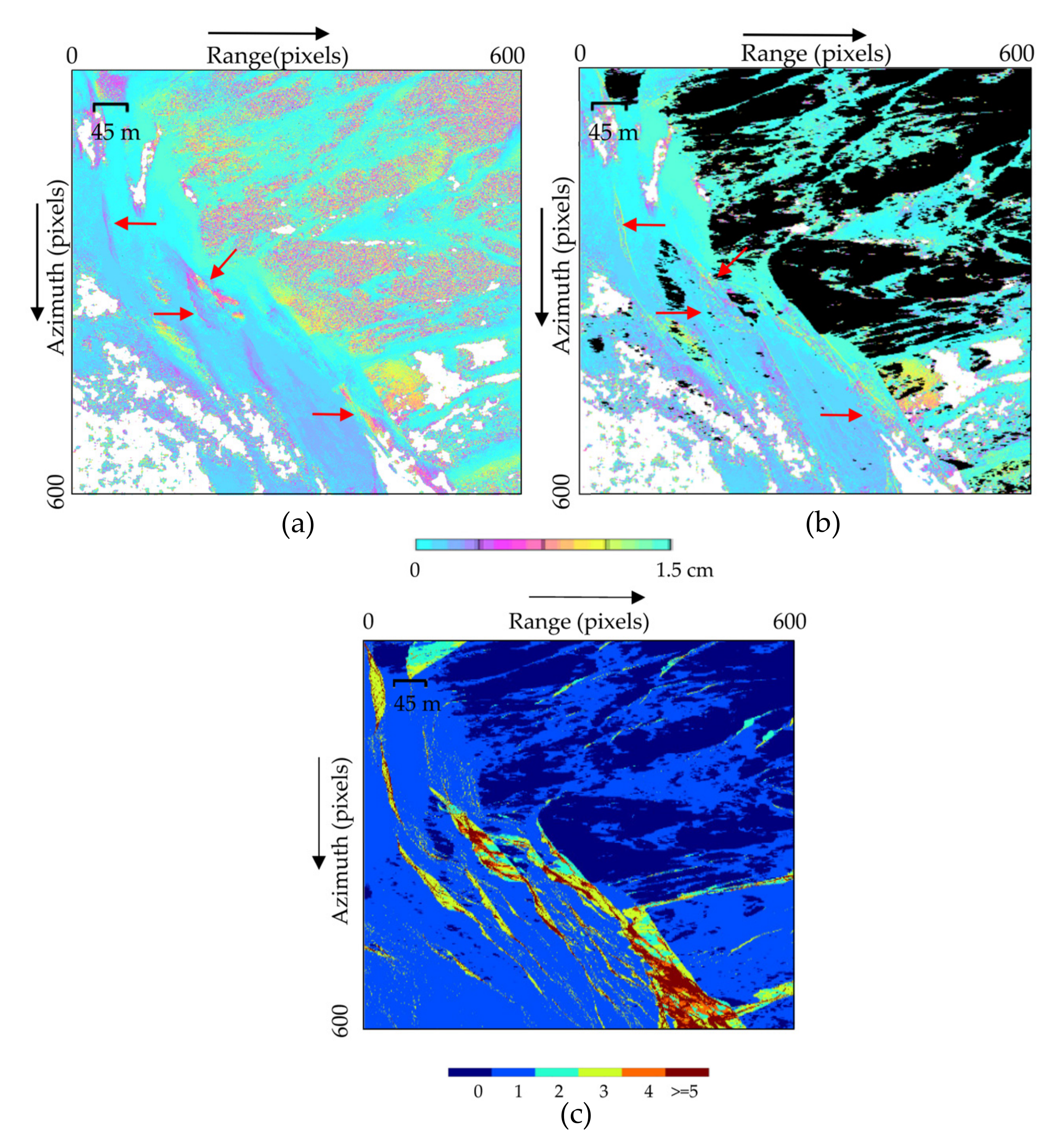
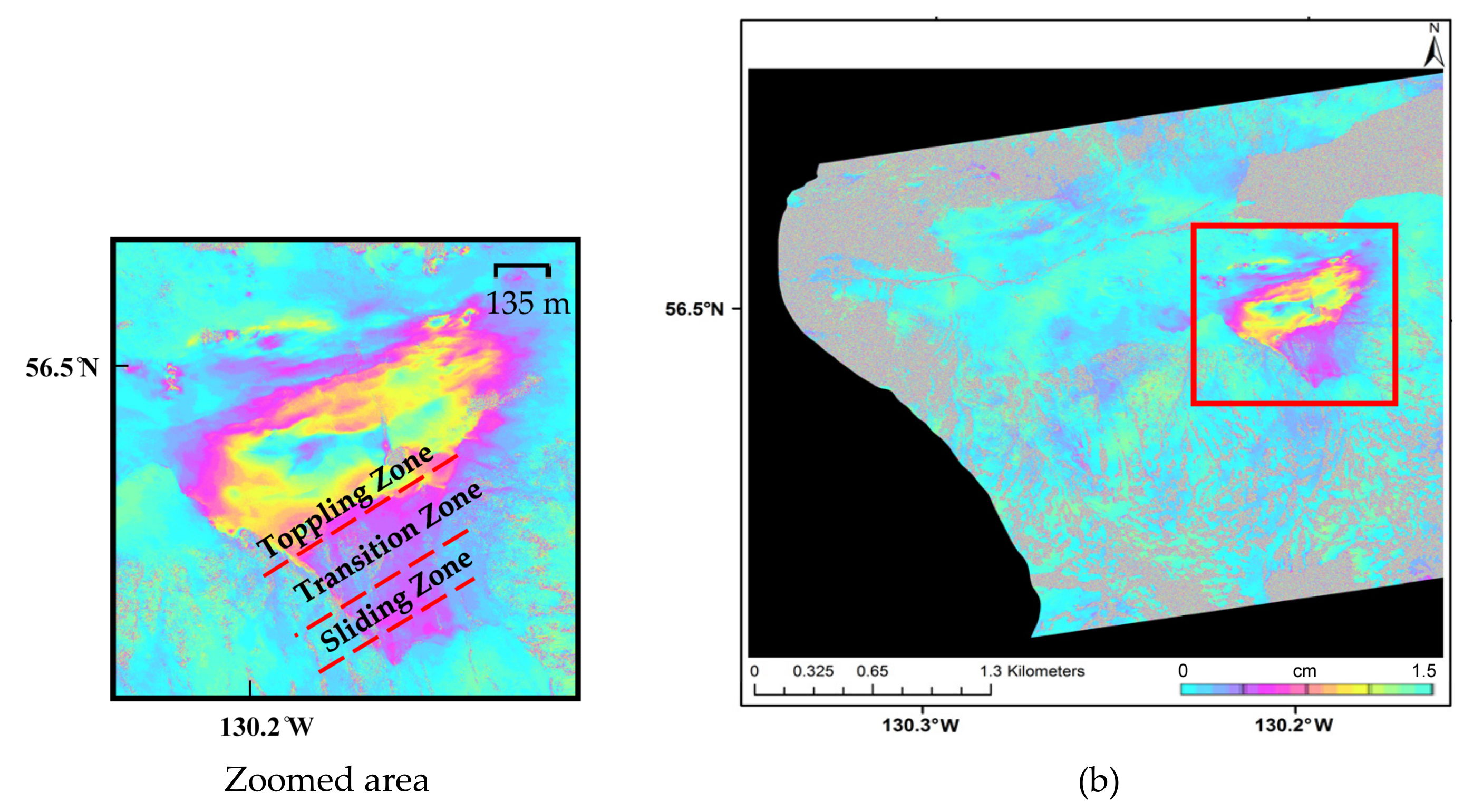
| 3. Boundary Range Slide | 132°W 57.5°N | Compound rockslide | Slope instability, large scale movements recorded | Large scale movement at the bottom of the landslide (toppling zone). Sliding and transition zones are also detectable. |
| Test Site | Time | No. Scenes | Orbit | Incidence (deg) | Polarization | Methods Demo |
|---|---|---|---|---|---|---|
| Hope Slide | August 2015–September 2017 | 8 | Desc. | 36 | HH | Enhanced atmospheric correction |
| Mount Currie | June 2017–September 2017 | 6/6 | Asc./Desc. | 22/34 | HH | Coherent layover topographic correction |
| Boundary Range Slide | June 2017–September 2017 | 8/8 | Asc./Desc. | 41/38 | HH | Enhanced DSM blending |
| Section Demo | Pair | Orbit | Incidence (deg) | Polarization | Perp. Baseline (m) | Weather |
|---|---|---|---|---|---|---|
| Atmospheric phase correction | 21 June 2015 | Desc. | 36 | HH | 45 | Cloudy, 10 °C |
| 4 August 2015 | Foggy, 14 °C | |||||
| Surface deformation map | 15 August 2015 | Desc. | 36 | HH | 160 | Clear, 13 °C |
| 23 September 2017 | Partly Cloudy, 16 °C |
| Section Demo | Pair | Orbit | Incidence (deg) | Polarization | Perp. Baseline (m) | Weather |
|---|---|---|---|---|---|---|
| Layover topographic correction | 24 July 2017 | Desc. | 34 | HH | 21 | Clear, 28 °C |
| 4 August 2017 | Clear, 26 °C | |||||
| Surface deformation map | 2 July 2017 | Desc. | 34 | HH | 5 | Clear, 27 °C |
| 6 September 2017 | Windy, 18 °C |
| Section Demo | Pair | Orbit | Incidence (deg) | Polarization | Perp. Baseline (m) | Weather |
|---|---|---|---|---|---|---|
| Surface deformation map | 30 June 2017 | Desc. | 38 | HH | 33 | Cloudy, 15 °C |
| 4 September 2017 | Mainly Clear, 21 °C | |||||
| Surface deformation map | 29 June 2017 | Asc. | 41 | HH | 27 | Cloudy, 17 °C |
| 3 September 2017 | Clear, 18 °C |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hosseini, F.; Pichierri, M.; Eppler, J.; Rabus, B. Staring Spotlight TerraSAR-X SAR Interferometry for Identification and Monitoring of Small-Scale Landslide Deformation. Remote Sens. 2018, 10, 844. https://doi.org/10.3390/rs10060844
Hosseini F, Pichierri M, Eppler J, Rabus B. Staring Spotlight TerraSAR-X SAR Interferometry for Identification and Monitoring of Small-Scale Landslide Deformation. Remote Sensing. 2018; 10(6):844. https://doi.org/10.3390/rs10060844
Chicago/Turabian StyleHosseini, Farnoush, Manuele Pichierri, Jayson Eppler, and Bernhard Rabus. 2018. "Staring Spotlight TerraSAR-X SAR Interferometry for Identification and Monitoring of Small-Scale Landslide Deformation" Remote Sensing 10, no. 6: 844. https://doi.org/10.3390/rs10060844
APA StyleHosseini, F., Pichierri, M., Eppler, J., & Rabus, B. (2018). Staring Spotlight TerraSAR-X SAR Interferometry for Identification and Monitoring of Small-Scale Landslide Deformation. Remote Sensing, 10(6), 844. https://doi.org/10.3390/rs10060844