1. Introduction
Due to its high resolution imaging and all weather capabilities, synthetic aperture radar (SAR) has become an important technique in remote sensing area. Ground moving target detection with SAR sensor is one of the challenging tasks in applications such as battle field surveillance and city traffic monitoring [
1,
2].
Thus far, detecting moving targets with SAR sensor mainly by performing clutter cancellation which is achieved with multichannel techniques such as Displaced Phase Center Array (DPCA) [
3], Along-Track Interferometry (ATI) [
4] and Space-Time Adaptive Processing (STAP) [
5,
6]. Such techniques have now been implemented on multiple airborne/spaceborne multichannel SAR systems such as PAMIR [
2], and RADARSAT-2 [
7]. The performance of detection can be improved by increasing the number of channels. However, with the number of channels increased, such system usually has high cost and high system complexity. Single channel methods play another important role in moving target detection application. Single channel moving target detection methods utilize the delocalization (Doppler shift) and defocusing characteristics of the moving target signature in SAR image. Methods utilizing Doppler shift cannot detect targets whose spectrum within the clutter spectrum [
8]. Method utilizing defocusing characteristic usually have heavy computational burden due to the iteration process [
9,
10]. The above disadvantages limit the application of single channel system. However, with recent research development in Circular SAR, the single channel system can fulfill the requirement of moving target detection task.
Circular SAR is a new SAR acquisition mode first introduced in 1996 [
11]. The SAR sensor performs circular flight while the main beam points to the scene of interest during the observation. This new imaging mode is validated with airborne experiments by several institutes [
12,
13,
14,
15]. The circular track causes difficulties in SAR signal processing. Thus, current CSAR studies are focusing on stationary scene/target application such as high resolution imaging [
16], DEM estimation [
17], concealed targets detection [
18], etc. Comparing with CSAR stationary scene studies, the studies on CSAR moving target issue are just beginning.
In early research, researchers use long time observation characteristic of circular SAR to obtain the echo of moving target in the illuminated scene [
19,
20,
21]. Many researchers have realized potential of using image sequence to detect moving targets in single channel SAR such as [
20,
22,
23]. In 2015, Poisson et al. [
24] proposed a single channel algorithm to reconstruct the real trajectory and estimate the velocity which focuses on using circular SAR properties . The algorithm uses target apparent position along circular flight to calculate the real position and velocity. However, the moving target detection method is not discussed. Thus, this paper focuses on proposing a moving target detection algorithm for single channel circular SAR.
Circular SAR is sensitive to slow moving targets due to long time observation. Because of circular track, radar can get the information of target’s radial velocity from multiple azimuth viewing angles which is good for velocity estimation. A moving target tends to be delocalized because of range speed and defocused because of azimuth speed and range acceleration [
8]. On the one hand, the target’s signature shifts to the different position on SAR subaperture image due to the radar’s circular track. On the other hand, static scene has several angular sectors where its scattered fields are varying slowly [
25]. Therefore, the background image can be filtered due to pixel value of static scene change severely when the target’s signature moves onto and leaves it. Then, targets can be detected by comparing the original subaperture images and background image. Moreover, the log-ratio operator is integrated into the proposed algorithm to achieve good clutter suppression result. The proposed algorithm includes the following steps. First, the Back Project (BP) algorithm is used to generate overlap subaperture logarithm images. Then, radiometric adjustment is applied to remove the antenna illumination effect. Next, the median filter is applied to the image sequence to get the background image. Finally, after subtracting the background to enhance the signal-to-clutter-ratio, the moving targets can be detected with CFAR algorithm.
The rest of the paper is organized as follows. In
Section 2, we analyze the moving target signal model because of the complex radar target relative motion. The moving target apparent position calculation equations are also introduced and demonstrated with point target simulation. Using these equations, we locate the moving target in SAR image. Then, a brief comparison of the target’s apparent trace under linear and circular flight for proposed detection algorithm is presented. In
Section 3, we give a detailed description of logarithm background subtraction algorithm. In
Section 4, we use one channel data of three channel airborne GOTCHA-GMTI dataset [
26] to validate proposed logarithm background subtraction algorithm.
Section 5 is the conclusion.
2. Moving Target Signal Model
In this section, the moving target signal model is presented. Apparent position calculation equations for arbitrary motion are described based on equal range equal Doppler principle. Then, the point target simulation and a brief comparison of target’s apparent trace morphology under circular and linear flight case are presented.
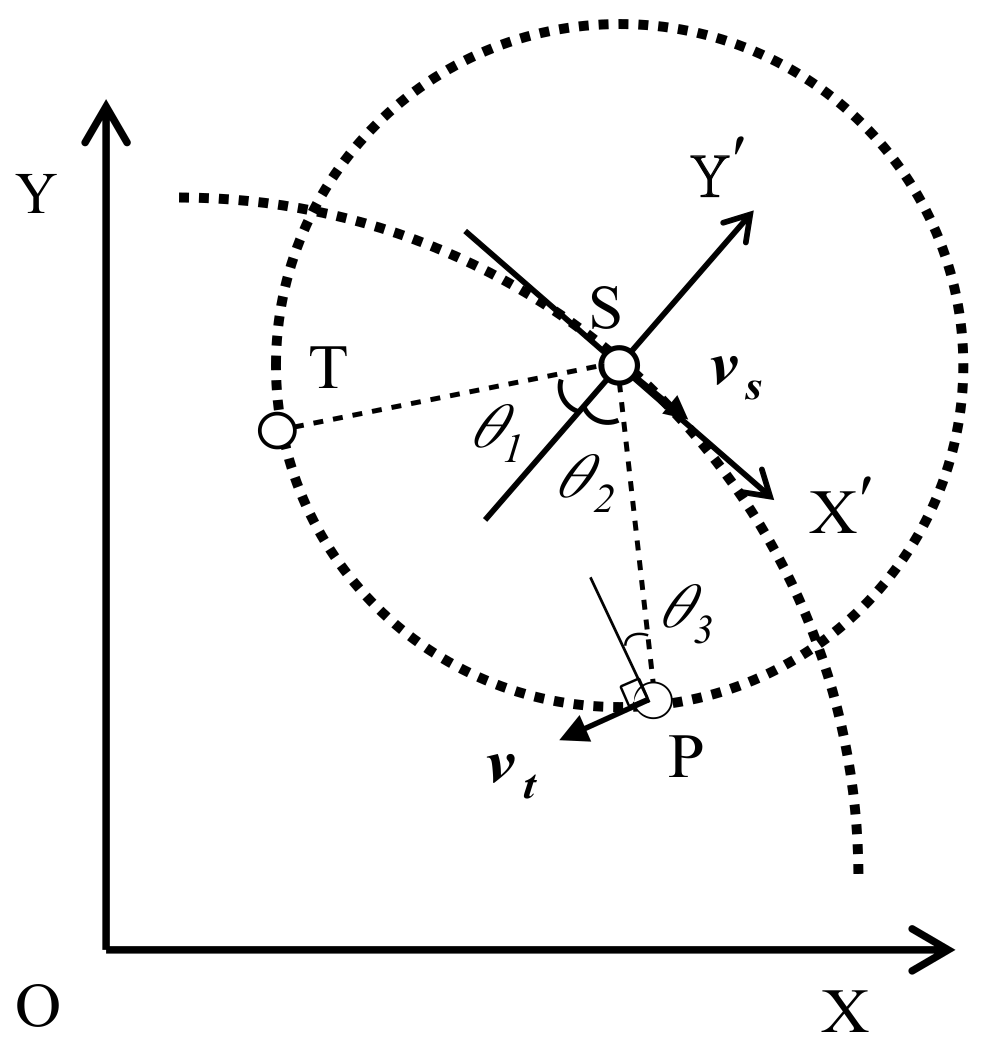
For mathematical convenience, here we assume the moving target is an isotropic point target during the observation. The top view of the coordinate system is shown in
Figure 1.
is the ground coordinate system. The radar performs a circular flight path at height
with constant speed
. During the illumination, the main beam points to the scene center
O. Here, we assume target’s motion is confined in ground plane and is illuminated by radar main beam. At time
, Radar position is denoted by
S, target real position is denoted by
P.
is target’s instantaneous speed.
represents the radar coordinate system. After SAR processing, target appears at position
T in SAR image because of target motion.
To calculate target’s apparent position in SAR image, we can use equal range equal Doppler equations. Because the two-way transmission time is fixed, distance of target to the radar and distance of target’s apparent position to radar are equal. Thus, the equal range relation is given by
Due to the number of unknowns, we need an extra equation to get the target image position. This can be fulfilled with equal Doppler equation. Doppler term of moving target has two parts: (1) radar motion induced part; and (2) target motion induced part. Thus, the Doppler frequency of moving target
is
When forming the SAR image, target will appear at
T. The corresponding Doppler frequency
is given by
Combining Equations (
2) and (
3), we can get the equal Doppler equation.
For consideration of generality, we rewrite Equation (
4) into vector form below.
From mathematical point of view, Equation (
5) sets a line across
T and
S. Thus, there are two solutions. The false solution can be excluded by constrain of beam pointing direction. Finally, the system to calculate the target’s apparent position is obtained:
Using the vector form, the moving target apparent trace in imaging plane can be computed even when the radar trajectory deviates from standard circular flight. In the above deduction, target motion induced Doppler ambiguity problem is not taken into consideration.
From Equation (
6), under side-looking imaging condition, there are two special cases. If target velocity coincides with line-of-sight (LOS), which means target only has range speed at that moment. Then, the target’s apparent position has maximum shift in azimuth. If target velocity is perpendicular to LOS (only azimuth speed), then the target apparent trace shall appear at its true location.
In system Equation (
6), the instantaneous target apparent position only relates to the target’s velocity and radar position and velocity at that time. Thus, Equation (
6) are not confined by radar observation geometry or target motion form. From this point of view, the defocusing effect has another interpretation. Target apparent position has a slight difference due to target Doppler changes at each azimuth sample time within azimuth integration, thus causing the defocusing.
To further demonstrate the effectiveness of Equation (
6), the simulation experiment is shown.
Table 1 is the SAR parameters for simulation. Radar flight is half circle and flying direction is clockwise from
. The radar works in side-looking mode is assumed.
The target motion uses the simplest form in simulation, i.e., moving with constant speed. Traditional analysis about moving targets are mainly focused on two cases: target has range speed and target has azimuth speed. In circular SAR mode, the azimuth viewing angle changes along time, and target can be seen in 360 degrees. However, when considering the half circle case, a similar analysis can be performed. Two targets with different moving direction are simulated, respectively. One moves along
X-axis from positive to negative. The other one has similar configuration, but along
Y-axis. Moving targets motion parameters are shown in
Table 2.
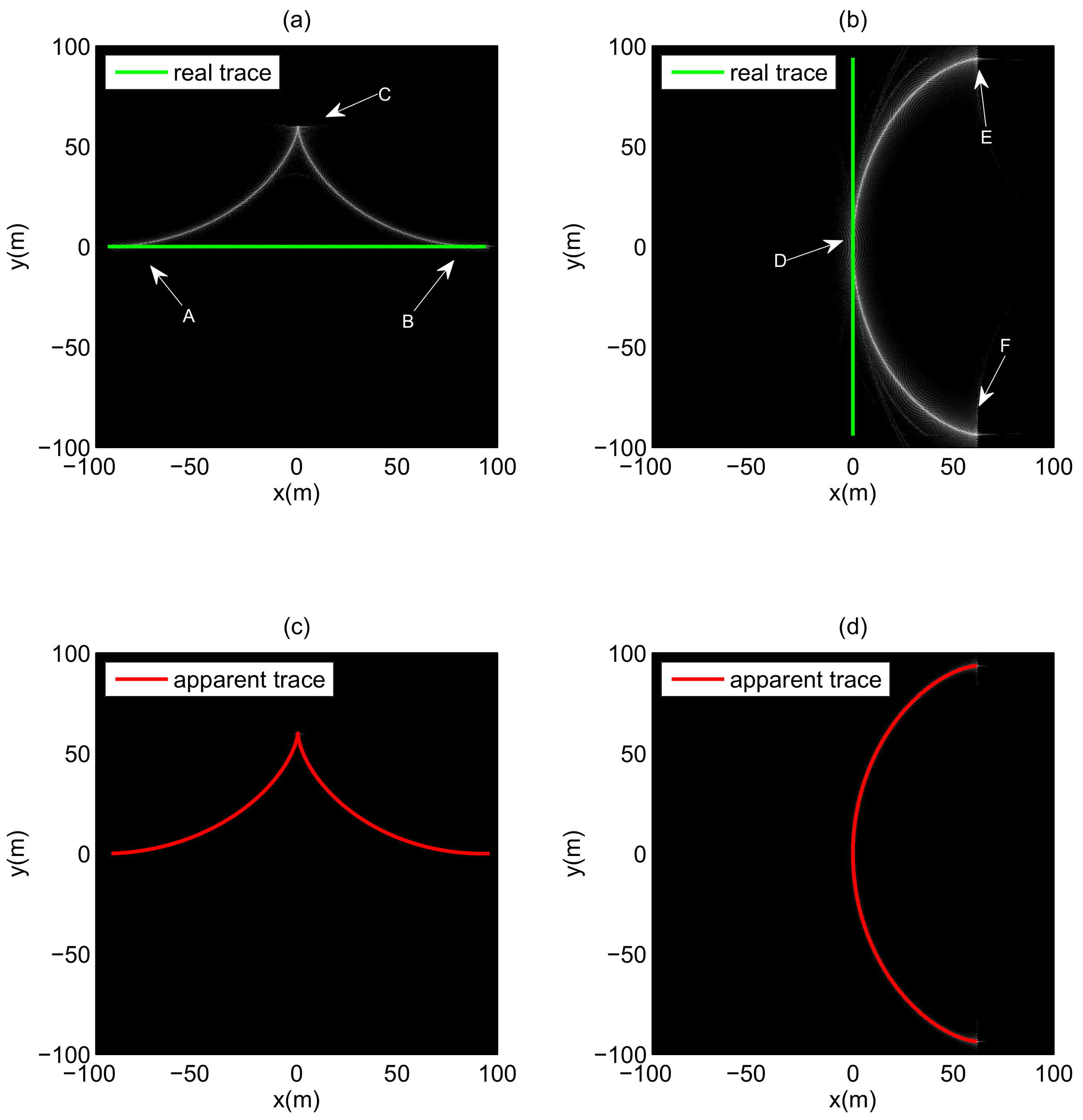
The simulation result is shown in
Figure 2. Left and right columns are Target 1 and Target 2 experiment results, respectively. First row is their SAR images. All azimuth data are coherently integrated. It is clear that the target apparent trace pattern is more complex than in linear SAR mode whose observation geometry is a straight line. It is not the elliptic or hyperbolic shape mentioned in [
27,
28].
The green line denotes target real trace. In
Figure 2a, the target smear signature coincides with target real trace at A and B. This is because the target velocity is perpendicular to LOS at that moment, as analysis presented in
Section 2. The maximum shift position is C. Target velocity coincides with LOS at that moment.
Figure 2b has the same special cases as D, E, and F. Second Row is the SAR image superimposed with apparent trace calculated by system Equation (
6). It is obvious that the calculated apparent trace matches the smear signature in SAR image. The effectiveness of system Equation (
6) is therefore validated.
As mentioned in
Section 2, Equation (
6) is not confined by circular flight. We use Equation (
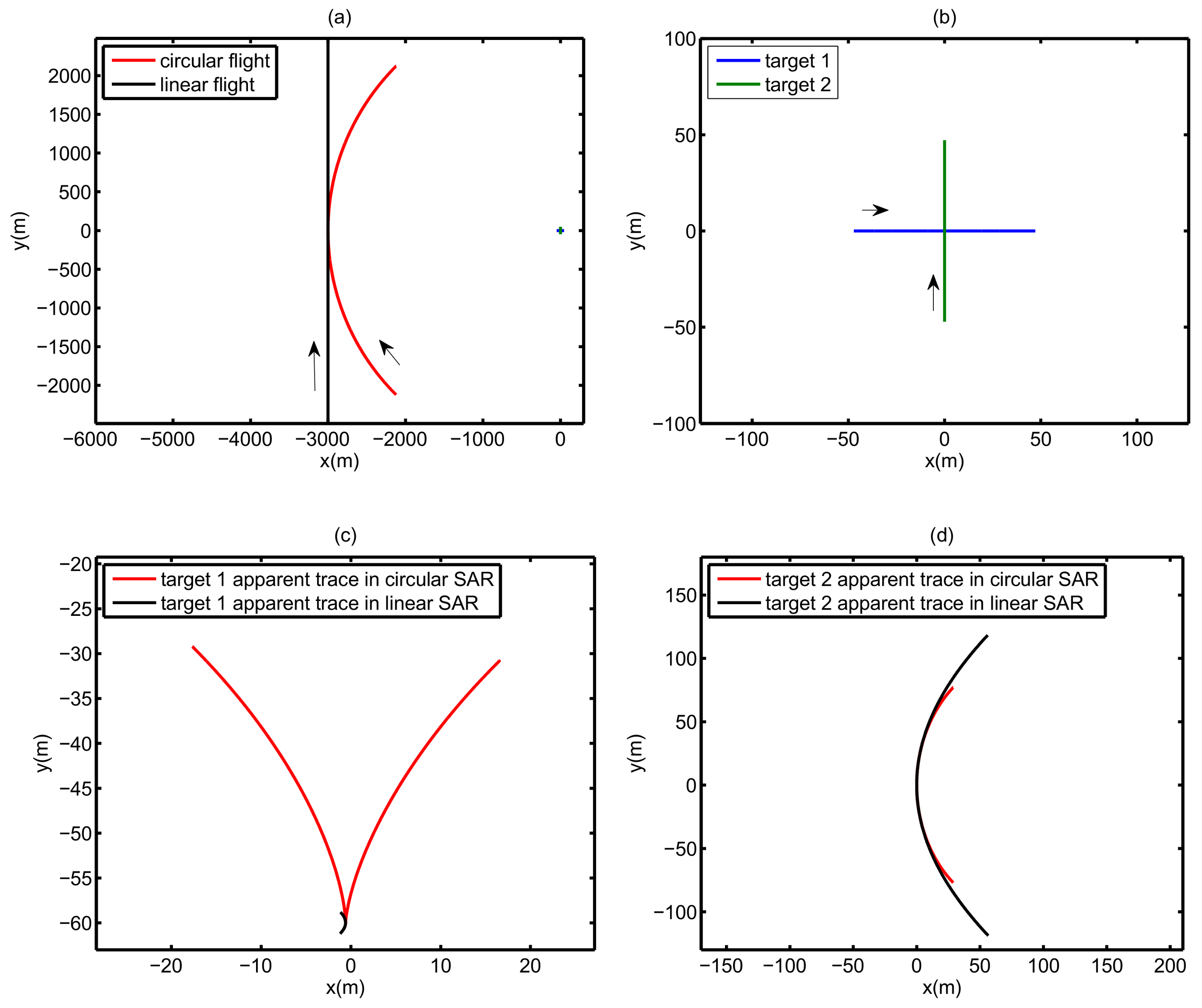
6) to make a comparison between the circular and linear radar flight to further demonstrate the characteristic of target apparent trace under circular flight.
Figure 3 is the comparison of moving target apparent trace in circular SAR and in linear SAR. Red line denotes the circular SAR results, and linear SAR results are denoted with black line.
Figure 3a is the top view of target radar geometry. The radar speed is 200 m/s, and both azimuth integration angles are
. For convenience, the radar and the targets are moving at height 0 m. Two types of moving targets are simulated in circular SAR mode and linear SAR mode, respectively, as shown in
Figure 3a in the right small area and enlarged in the picture in
Figure 3b. Target 1 moves along
X-axis (only has range speed), while Target 2 moves along
Y-axis (only has azimuth speed). Their speed is 4 m/s.
Figure 3c is apparent trace of Target 1 in circular SAR and linear SAR, and their lengths along
X-axis are 34.24 m and 0.62 m, and along
Y-axis are 30.79 m and 2.39 m, respectively. The apparent trace of Target 1 in circular SAR spans more areas than in linear SAR. The apparent trace in linear SAR only occupies several resolution cells even under
synthetic aperture which makes it hard to differentiate from the stationary target (in SAR image domain). In
Figure 3d, in circular SAR, the lengths of apparent trace along
X-axis and
Y-axis are 28.8 m and 153.9 m, respectively. In linear SAR, the lengths are 56.5 m and 237.1 m, respectively. The apparent trace of Target 2 spans over 100 m at azimuth direction in both cases.
Most detecting moving targets in image domain algorithms take advantage of target image motion in subaperture images, which means it requires long apparent trace. Thus, theoretically, in linear SAR, only target with azimuth speed has high chance to be detected and difficult for those only with range speed. Hence, for wide aperture case, the circular flight is better than linear flight in moving target detection using subaperture image sequence.
3. Logarithm Background Subtraction
In this part, we give details about the logarithm background subtraction.
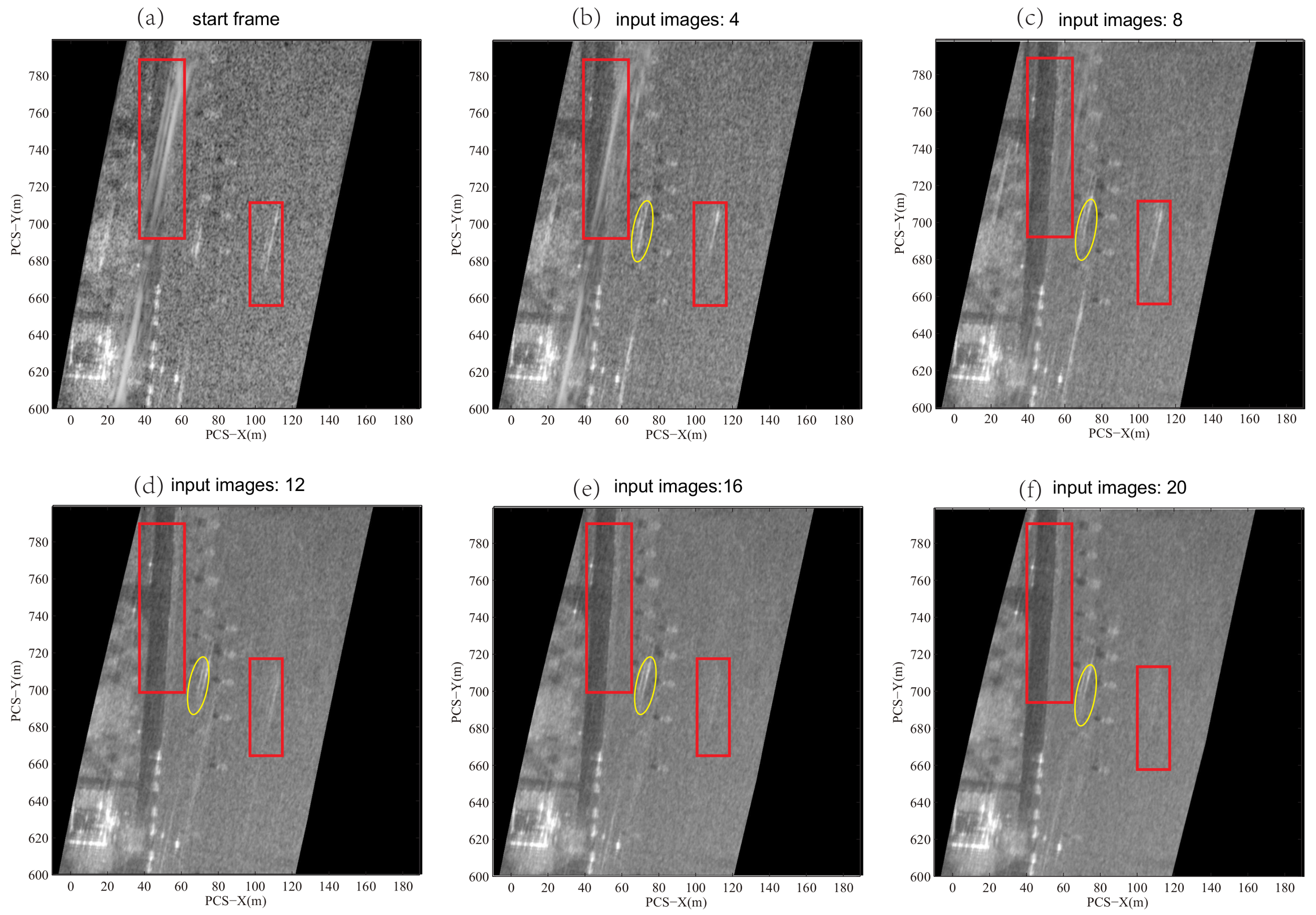
A subaperture image can be seen as combination of background image (contain clutter) and foreground image (contain moving target). For clutter, its scattered field is varying slowly in limit angular sector. For moving target, its image position is changing along azimuth viewing angle because of circular flight. Hence, the target has complex apparent trace form than linear SAR mode whose radar observation geometry is a straight line. From subaperture point of view, target signature is moving in consecutive subaperture images. Thus, value of certain pixel would have sudden change when target signature is moving onto and leaving it. According to analysis, the median filter is selected to generating background image (clutter). The SCR is improved after subtraction processing. The log-ratio operator is integrated into the process. The operator can be defined as the logarithm of the ratio of two images. This is equal to the subtraction of two logarithm images. Finally, the moving target can be detected by applying CFAR detector.
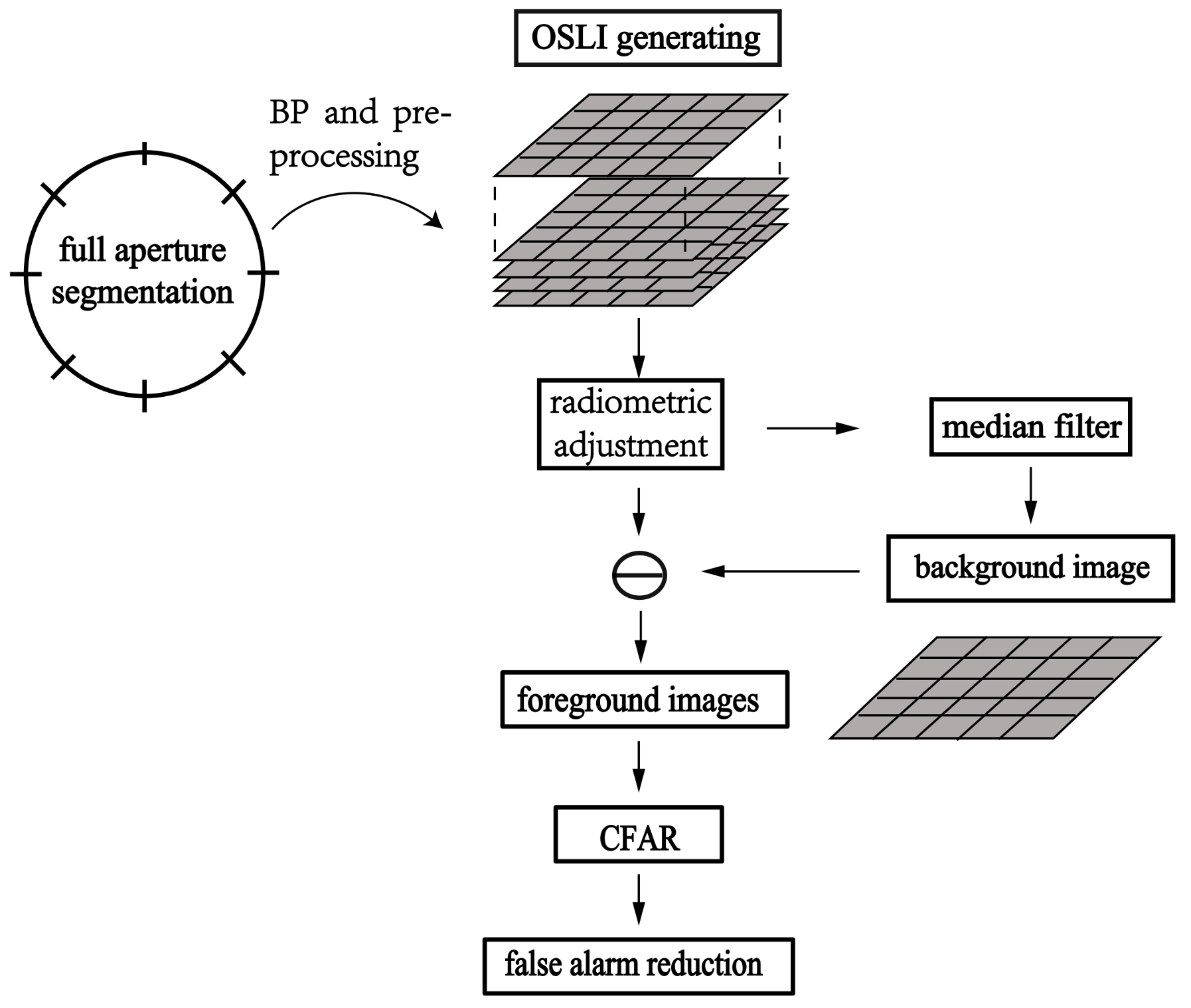
The processing chain is shown in
Figure 4. The processing chain of the algorithm has following parts: (1) segment the full aperture into
N arcs with equal length; (2) for each arc, using the same image grid to generate
M overlap subaperture images (in dB unit) , perform preprocessing to form the Overlap Subaperture Logarithm Image (OSLI) sequence; (3) perform radiometric adjustment process on each OSLI sequence; (4) apply median filter along the azimuth time dimension to the OSLI sequence to get corresponding background image; (5) generate foreground images by using OSLI subtracts the background image; and (6) target detected on foreground images with the CFAR algorithm.
In the following, the details are presented.
3.1. Preprocessing and OSLI Generating
The segmentation issue is related to the anisotropic backscatter behavior and target motion. If azimuth angle of each arc is too wide, then scattered field of static scene might change too much. Therefore, the background image cannot be well modeled. On the other hand, if the angle is too narrow, then the target defocusing signature may not exceed certain pixels in image sequence. Thus, there might be residual target signature remain in filtered background image. This will deteriorate the detection performance. Thus far, this aperture partition parameter is set by experimental test, while the optimal partition criterion is still being researched.
After, the full aperture is divided into
N arcs using the echo of
ith arc to generating
M overlap subaperture intensity images
. The reason for forming overlap images is that they can provides more azimuth sampling data for each pixel. The overlap images are good for target tracking due to the target image motion continuity is preserved. The algorithm to form the SAR image is the time domain back projection algorithm (BP). BP is a typical SAR imaging algorithm which can handle the circular radar observation geometry. There are several kinds of fast algorithms to reduce computational burden [
16,
29] in practical application. The most important component is that the images can be formed with the same image grid, thus avoiding applying an extra image coregister step. Other imaging algorithms can also be applied, such as polar format algorithm [
30]. However, the image coregister step should be applied and the error due to the mismatch should be taken into consideration.
The next step is suppressing the speckle noise. For
jth intensity image
, a
averaging cell to despeckle noise is used. Finally, the OSLI sequence is obtained by transforming the images into dB units and indexing with azimuth time. The overall expression in this subsection is given by Equation (
7)
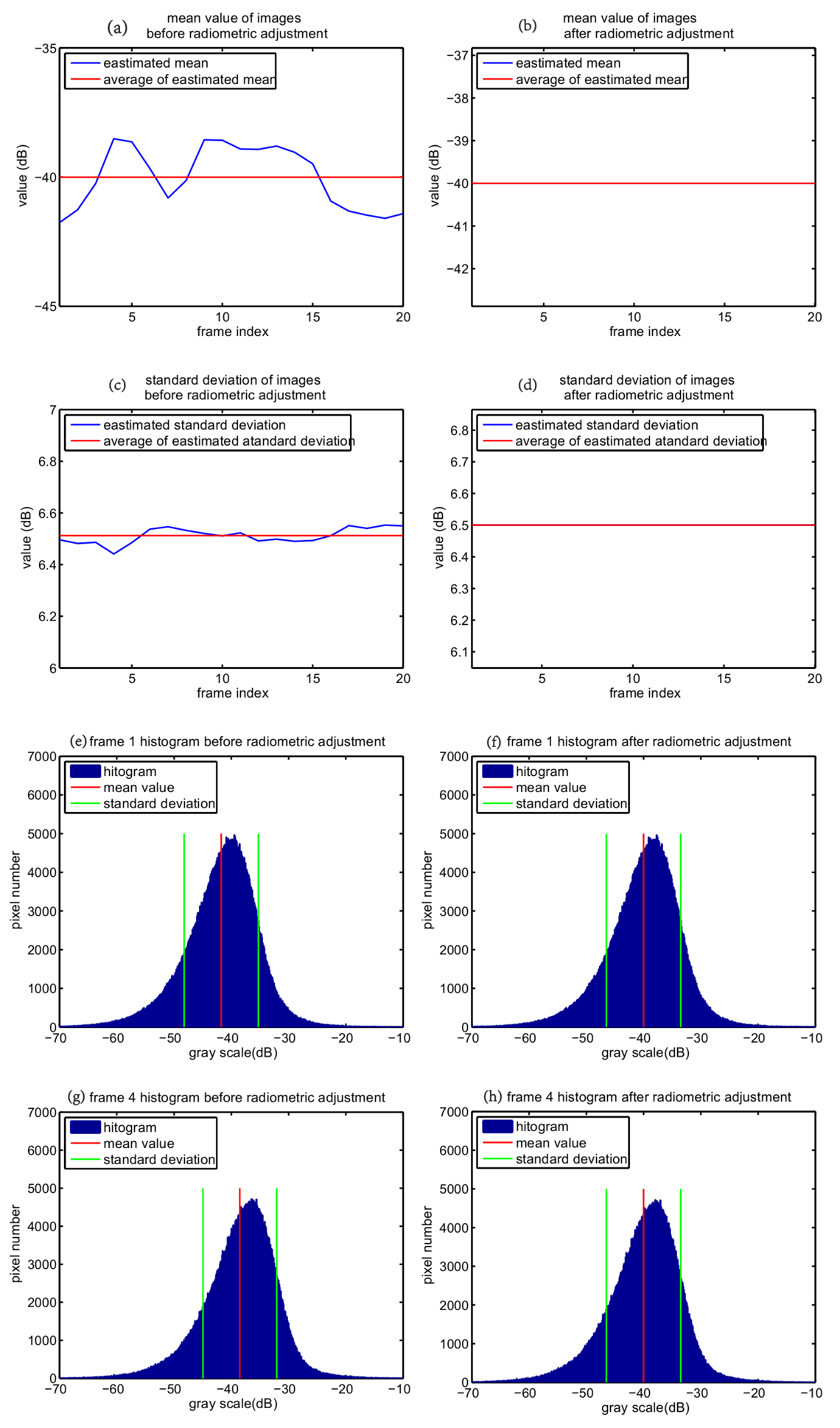
3.2. Radiometric Adjustment
One of the basic assumptions of this algorithm is that the pixel value of the static clutter is only changing along azimuth viewing angle. In practice, however, it is influenced by antenna pattern anisotropy [
25]. If the illumination variation between images cannot be well compensated, there will be false alarms. The circular path makes this problem more difficult. Thus, a simple method called Intensity Normalization is adopted.
This method can adjust the pixel values in each image have the same mean value and standard deviation [
31]. In our algorithm, we first collect the mean value and standard deviation from each image in
ith OSLI as in Equation (
8).
and
are mean value and standard deviation of
jth image. Then, calculate the average of collected data as the new mean value and standard deviation.
Apply intensity normalization method to each image with
and
, as shown in Equation (
10).
The is the new images which can be seen as without illumination variation and as input data for background generating.
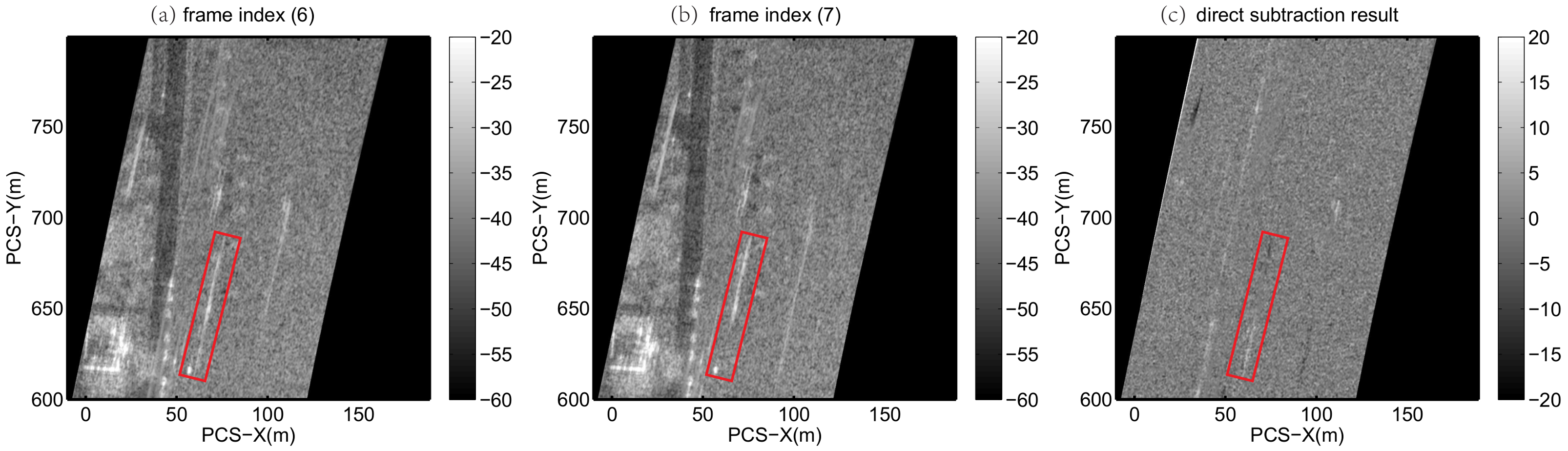
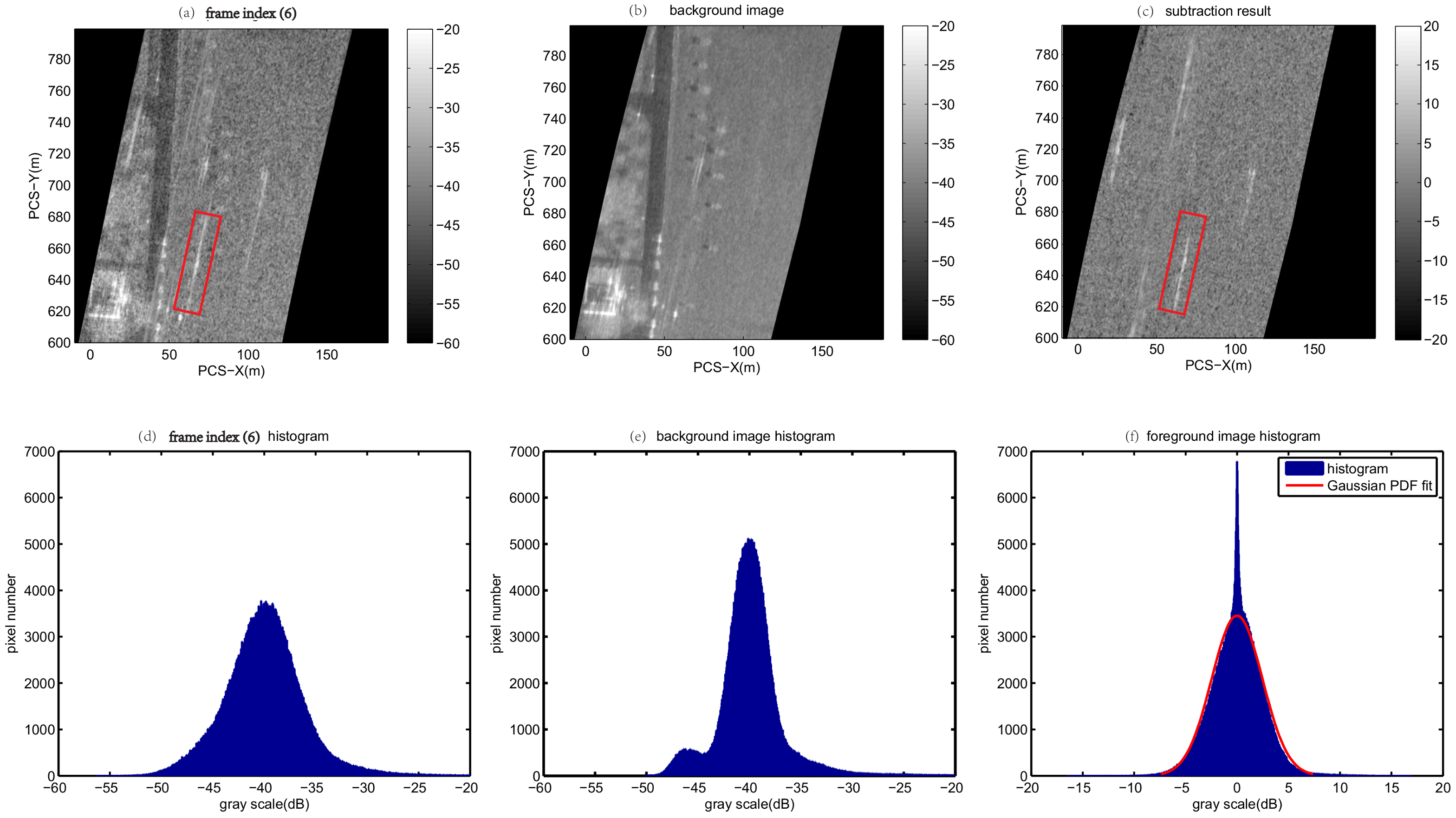
3.3. Background Generating and Subtraction
Filtering out the background image is a key step in this algorithm. As the analysis presented in above section, the target signature will cause pixel with sudden change (high value) when it moves onto the pixel. The median filter is selected to model the background images because it can exclude the high value in a series of numbers. Taking a pixel in OSLI as an example, the median filter sorts the input values of certain pixel from all input subaperture images and then pick the middle element from the sorted data as the pixel value in the background image. The background image
corresponding to
ith radiometric adjusted
is obtained by
The output background image is expressed in dB unit. For mathematical convenience, we use to denote it. is the ith OSLI sequence which has performed the intensity normalization.
Next, the foreground image sequence is obtained by using the input images to subtract the background image, which is given by Equation (
12):
denotes the jth output image in the foreground image sequence.
In Equation (
12), the right two terms are in logarithm form. Thus, it can also be interpreted as image-ratio in logarithm form, i.e the famous log-ratio operator [
32,
33]. Due to the image-ratio process, the canceled clutter part lies near the zero in the foreground image histogram. The moving target part will fall into the foreground image histogram tail. The Gaussian distribution has been used on the image processed by log-ratio operator, as demonstrated in [
32]. The Gaussian distribution fits the histogram of foreground image, as shown in the real data experiment.
3.4. CFAR Detection
In this section, two parameter CFAR detector [
34] to detect the moving targets in the foreground images. As mentioned above, the Gaussian distribution is assumed. The Gaussian distribution characterizing the foreground image statistic is given by
and
are mean and standard deviation of
jth foreground image, respectively. Rewrite Equation (
13) with
. Equation (
13) becomes standard normal distribution
. Because we assume the background image only has static scene, the region where target’s signature presence will have higher pixel value. Thus, target signature is in positive part of foreground image histogram. Then, the false alarm rate is
is the threshold for the test cell in CFAR. Given the false alarm value, the
can be obtained. Hence, the decision rule of target detection for test cell
X is
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}