Railway Track Condition Assessment at Network Level by Frequency Domain Analysis of GPR Data





Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- diagnosis during inspection survey and detection of events and possible track defects;
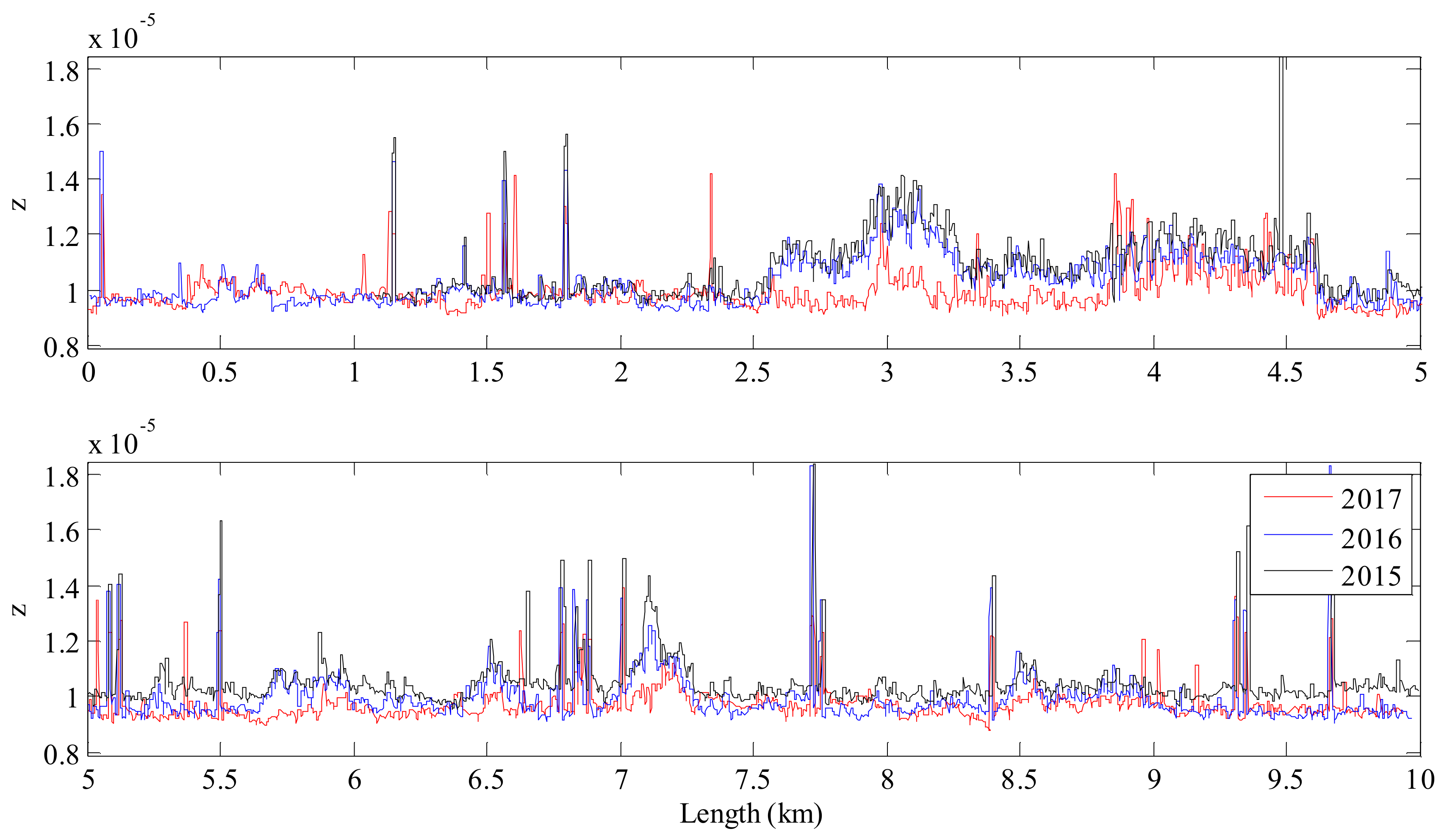
- systematic events identification, in consecutive surveys, performed yearly in the same season;
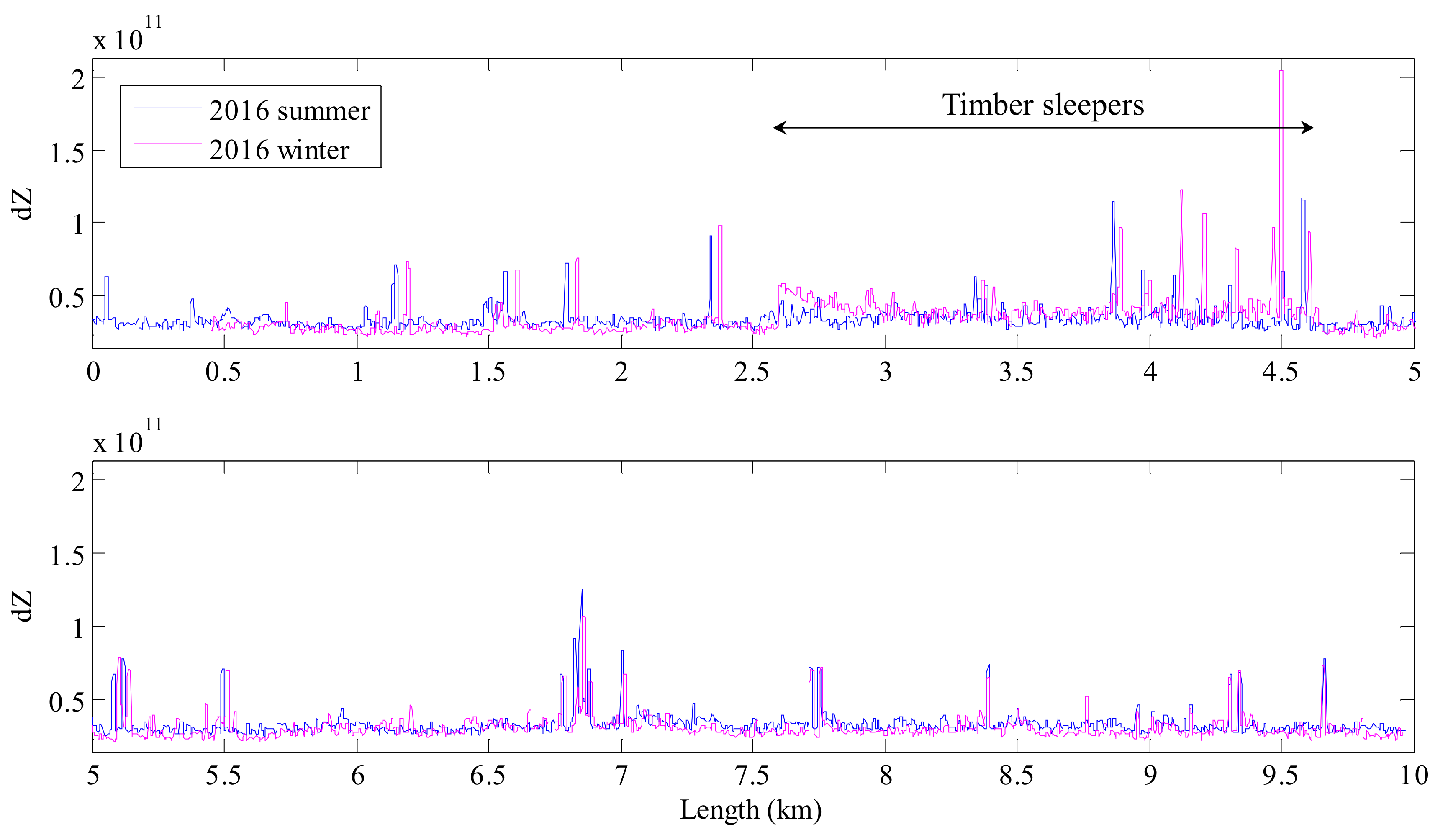
- identification of track changes by comparing surveys performed in distinct climate condition along the year (e.g., summer vs. winter).
2. Ground Penetrating Radar for Track Assessment
2.1. Overview on the Use of GPR for Railway Monitoring
2.2. GPR Signal Processing in the Spectral Domain
3. A New Method for the Processing of GPR Data Recorded Over Railway Lines
3.1. GPR Equipment
3.2. Methodology Set-Up
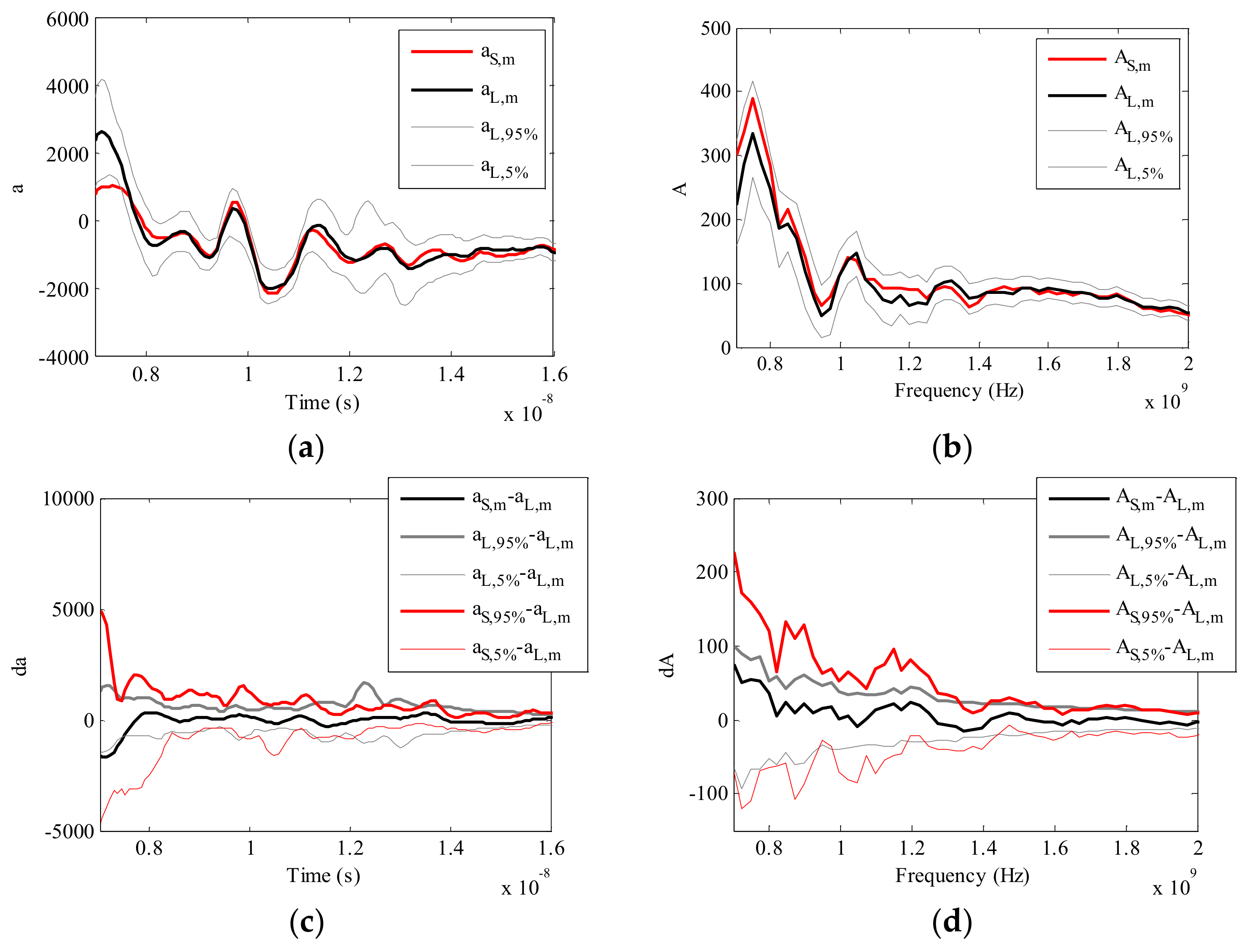
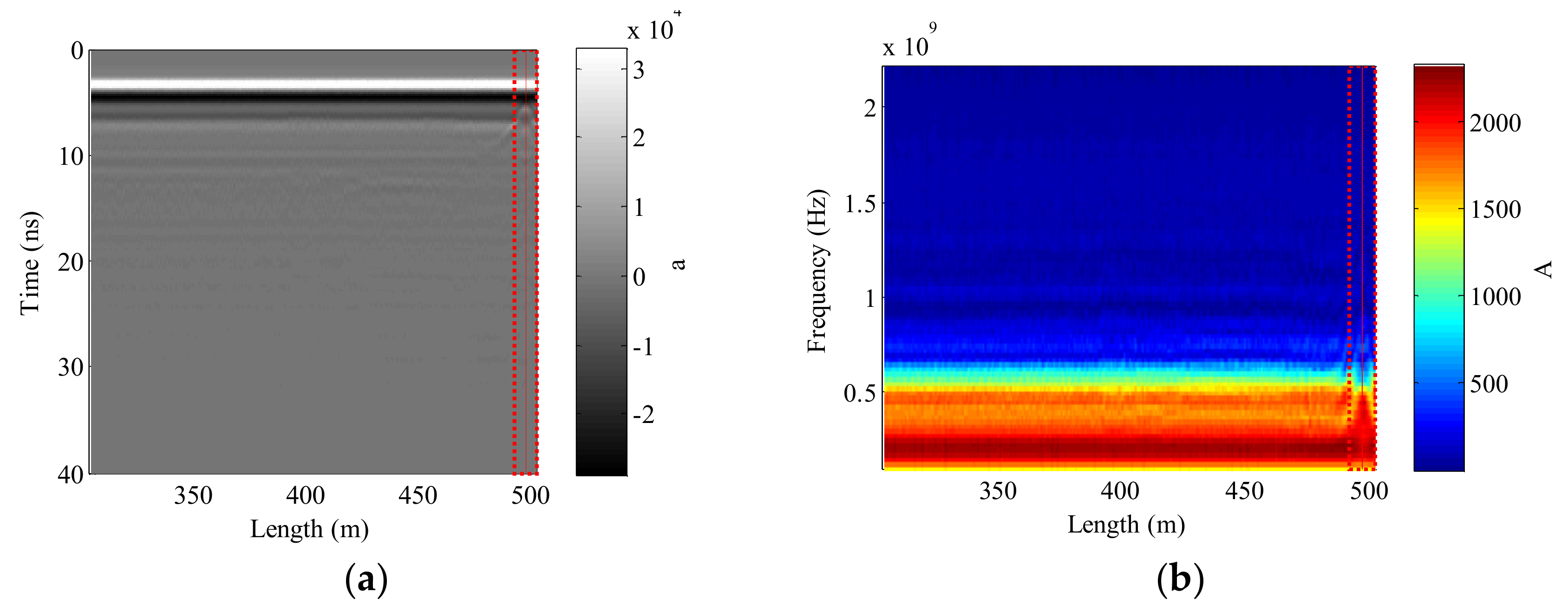
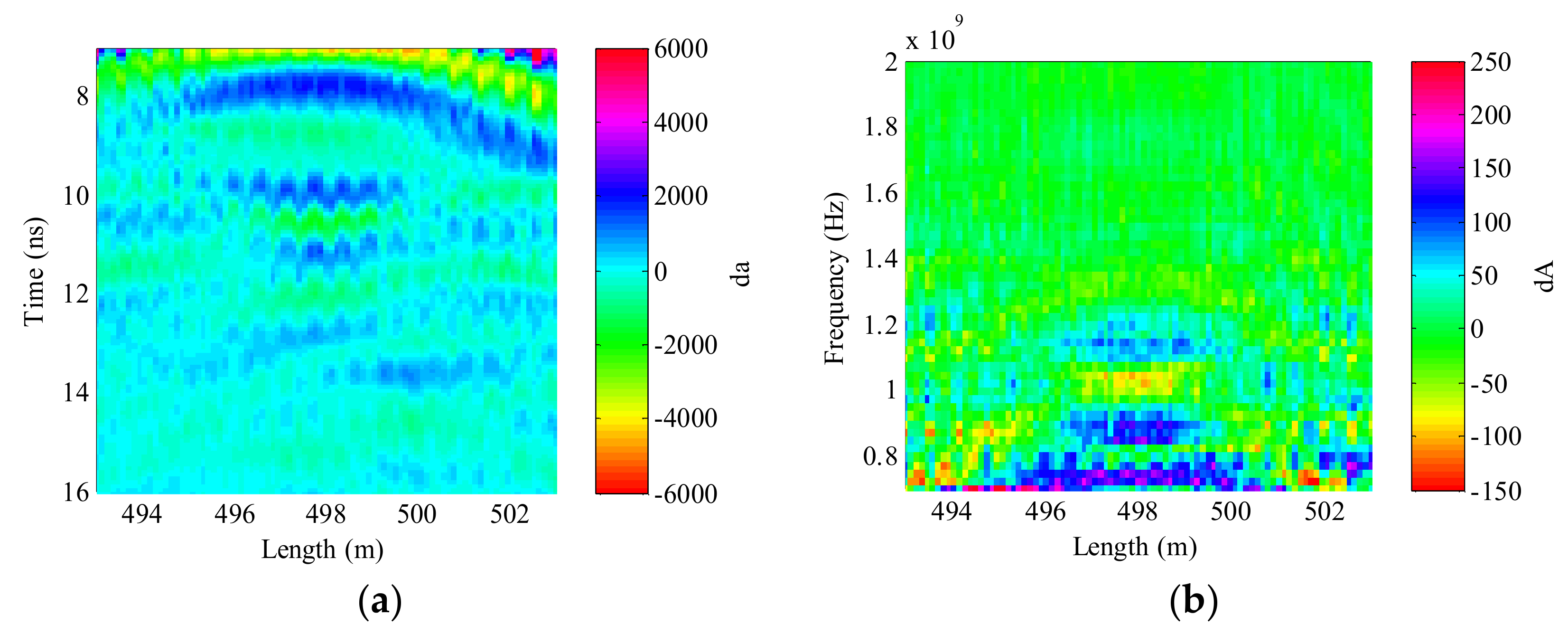
3.2.1. Range Selection of GPR Signal in Time and Frequency Domains
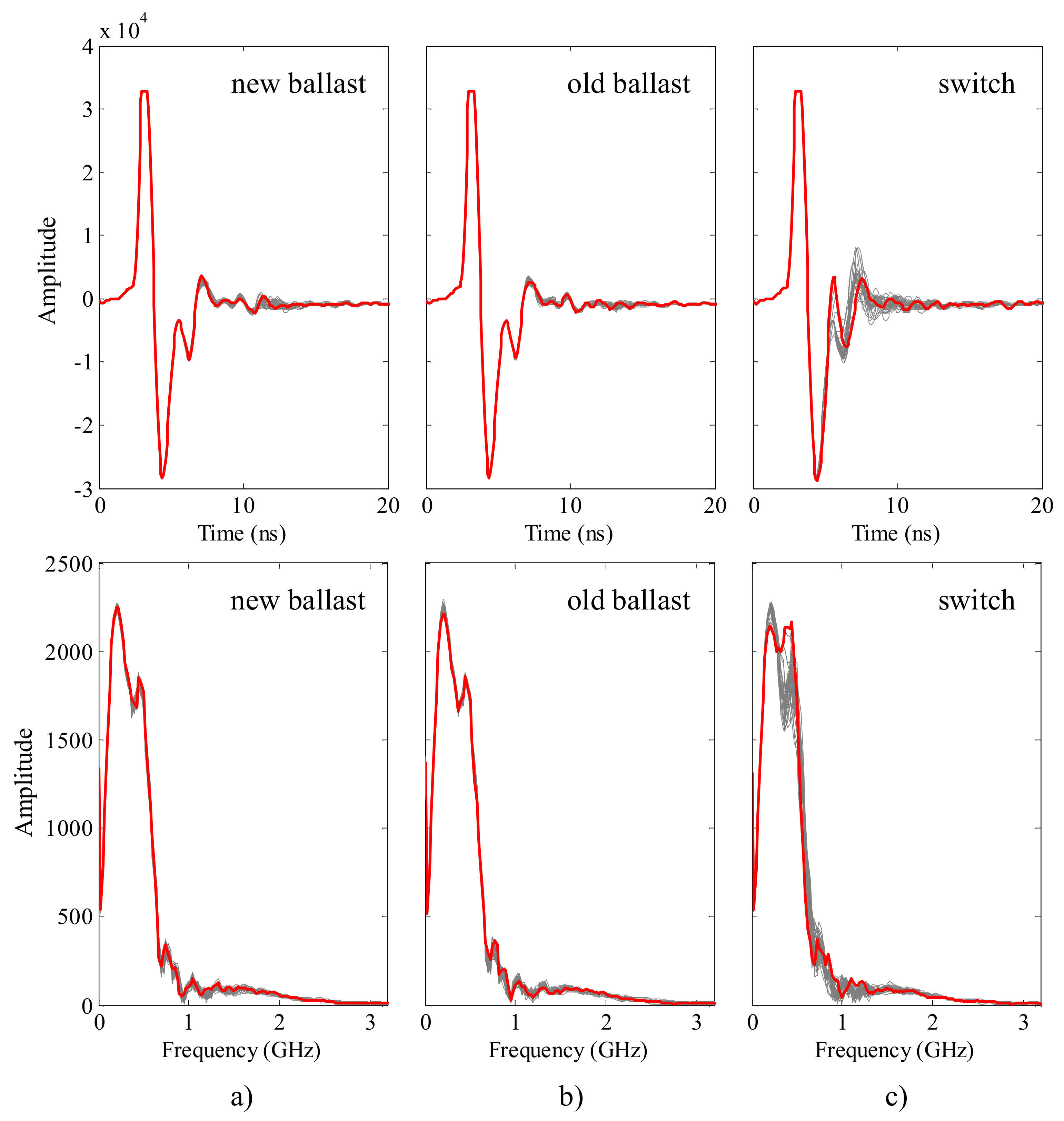
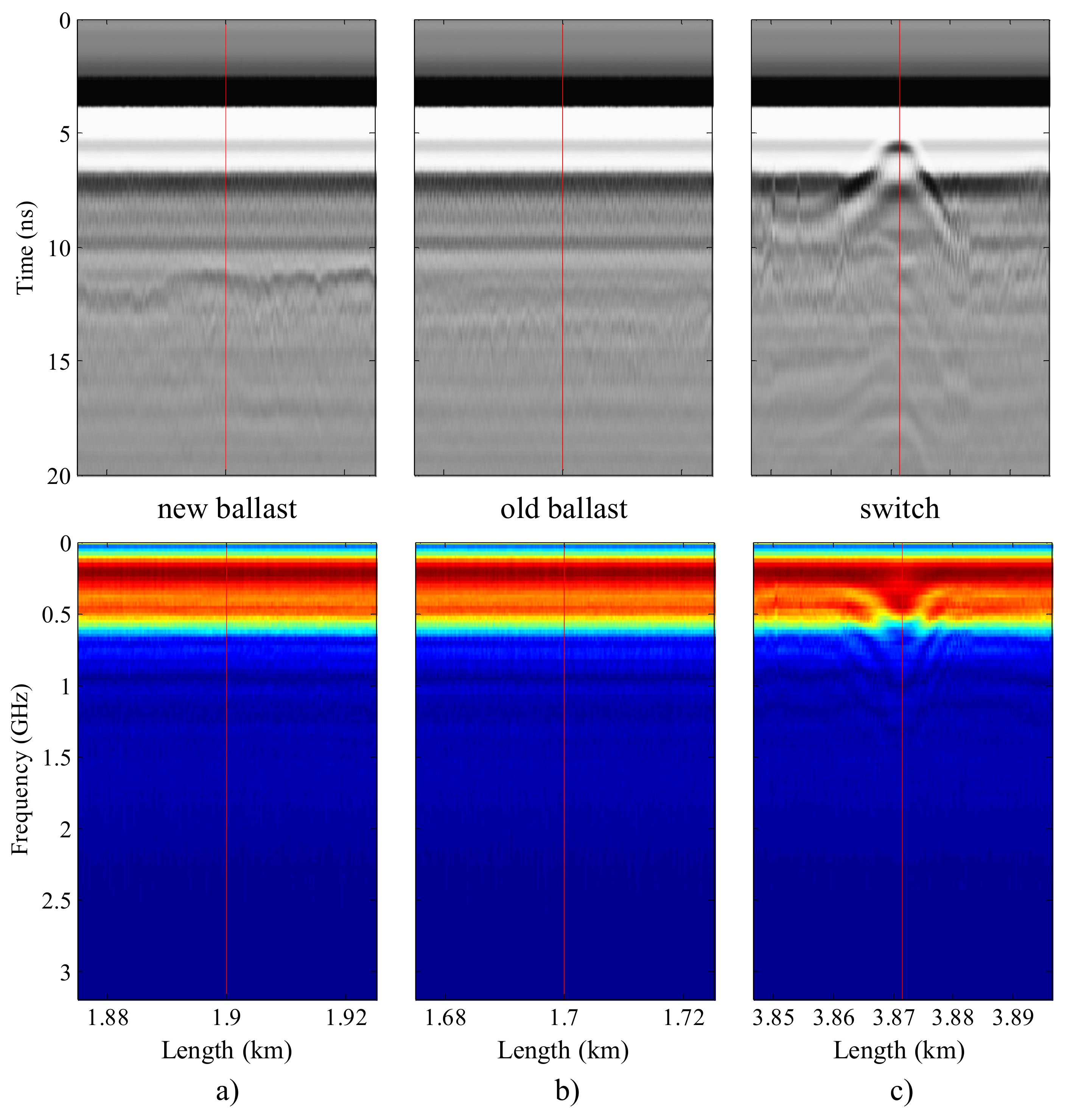
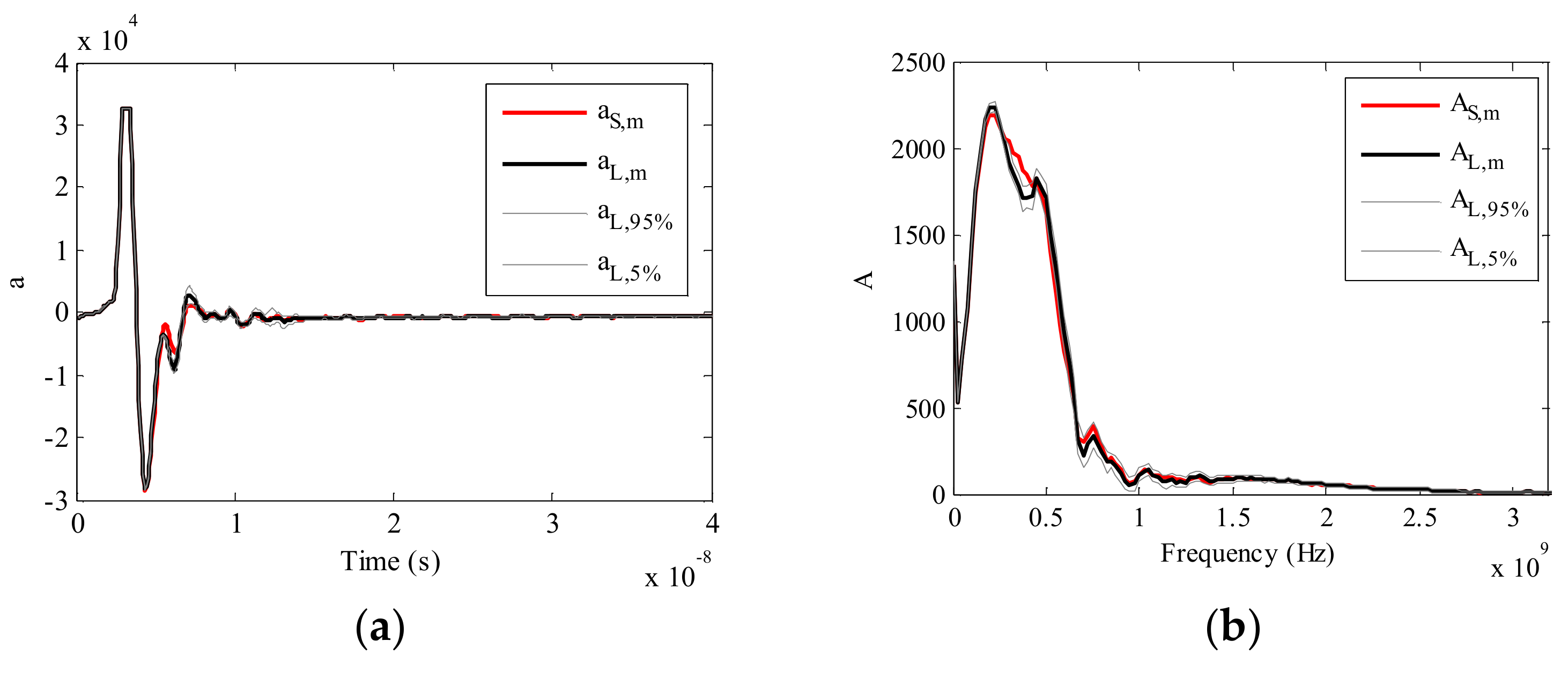
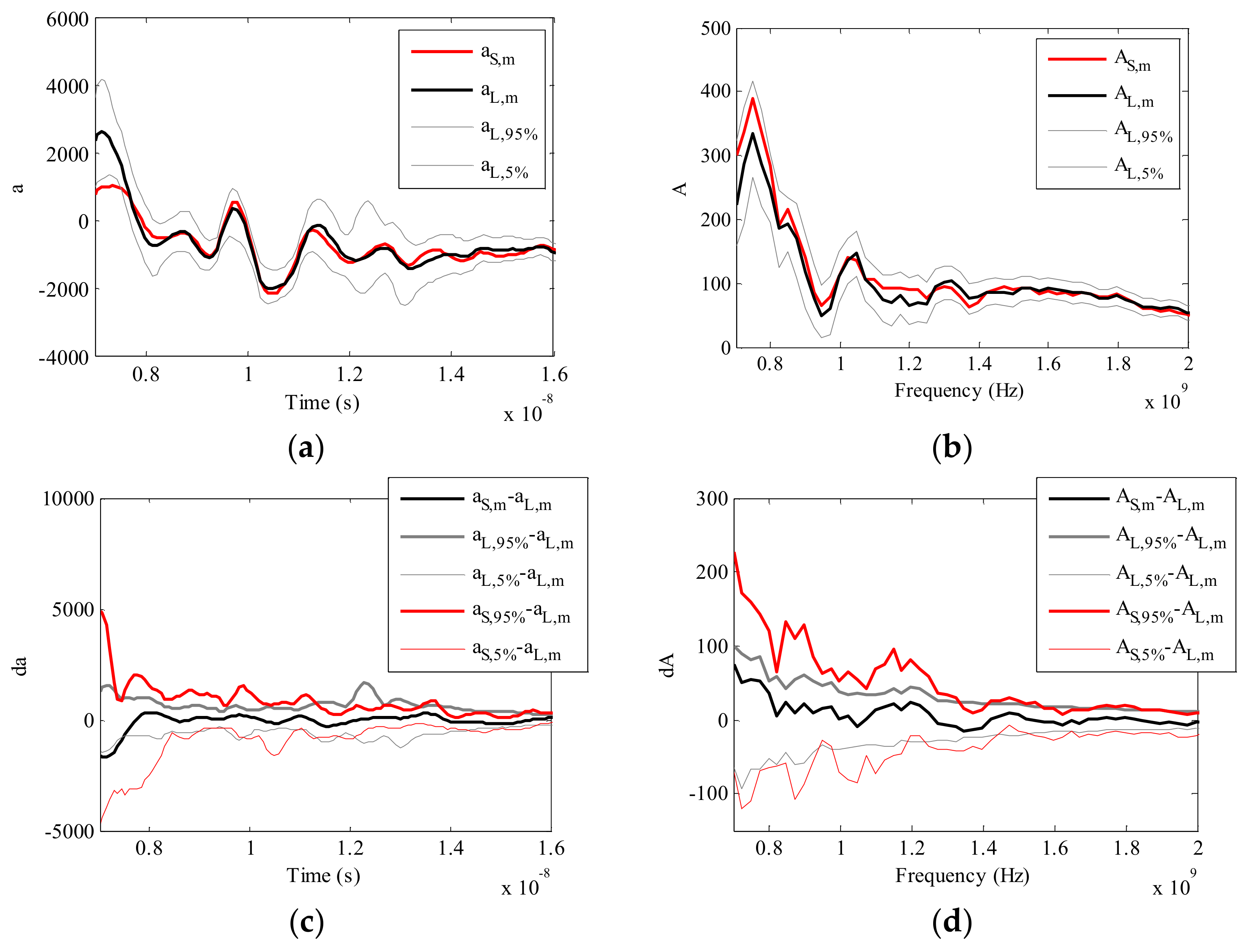
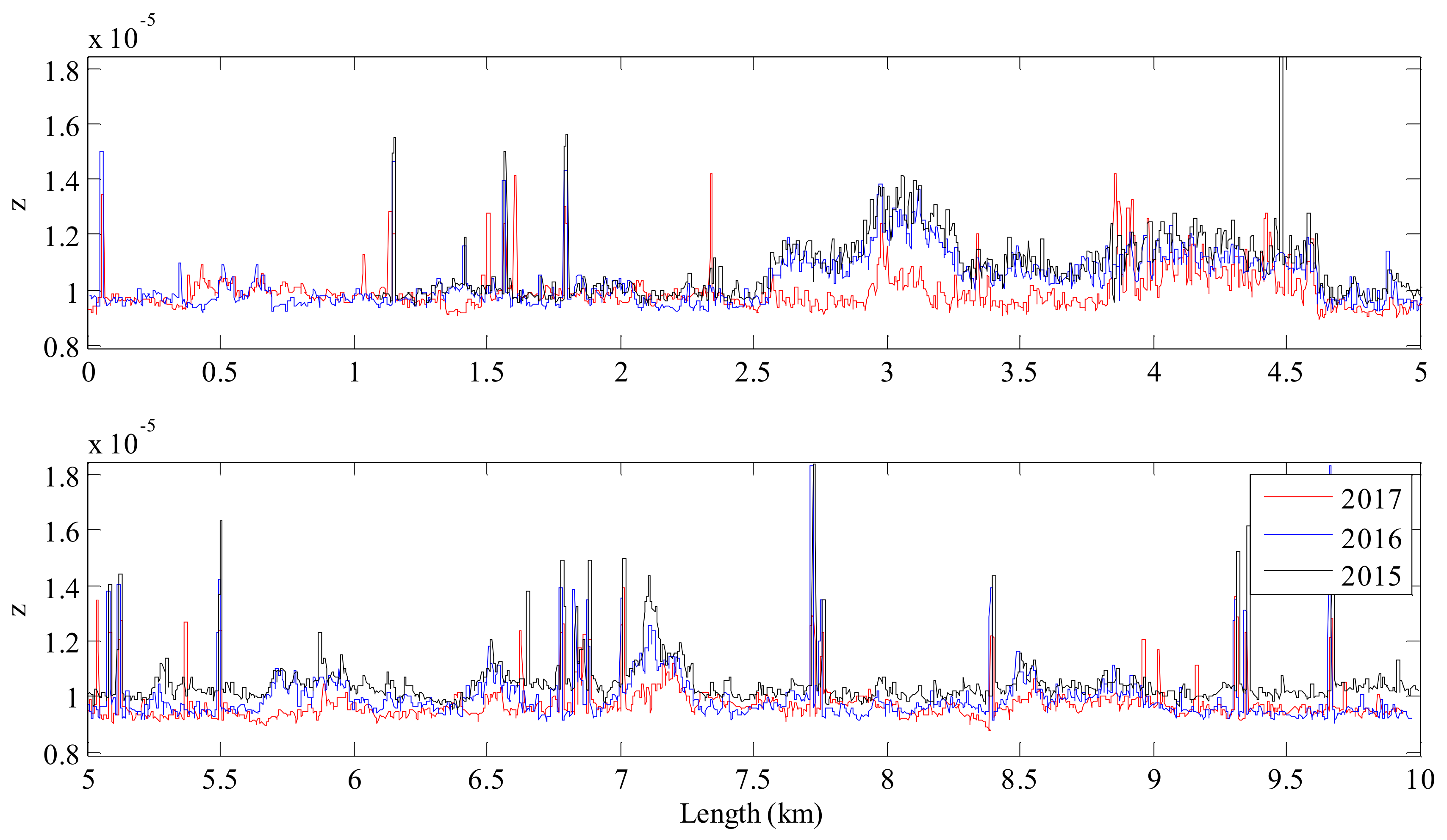
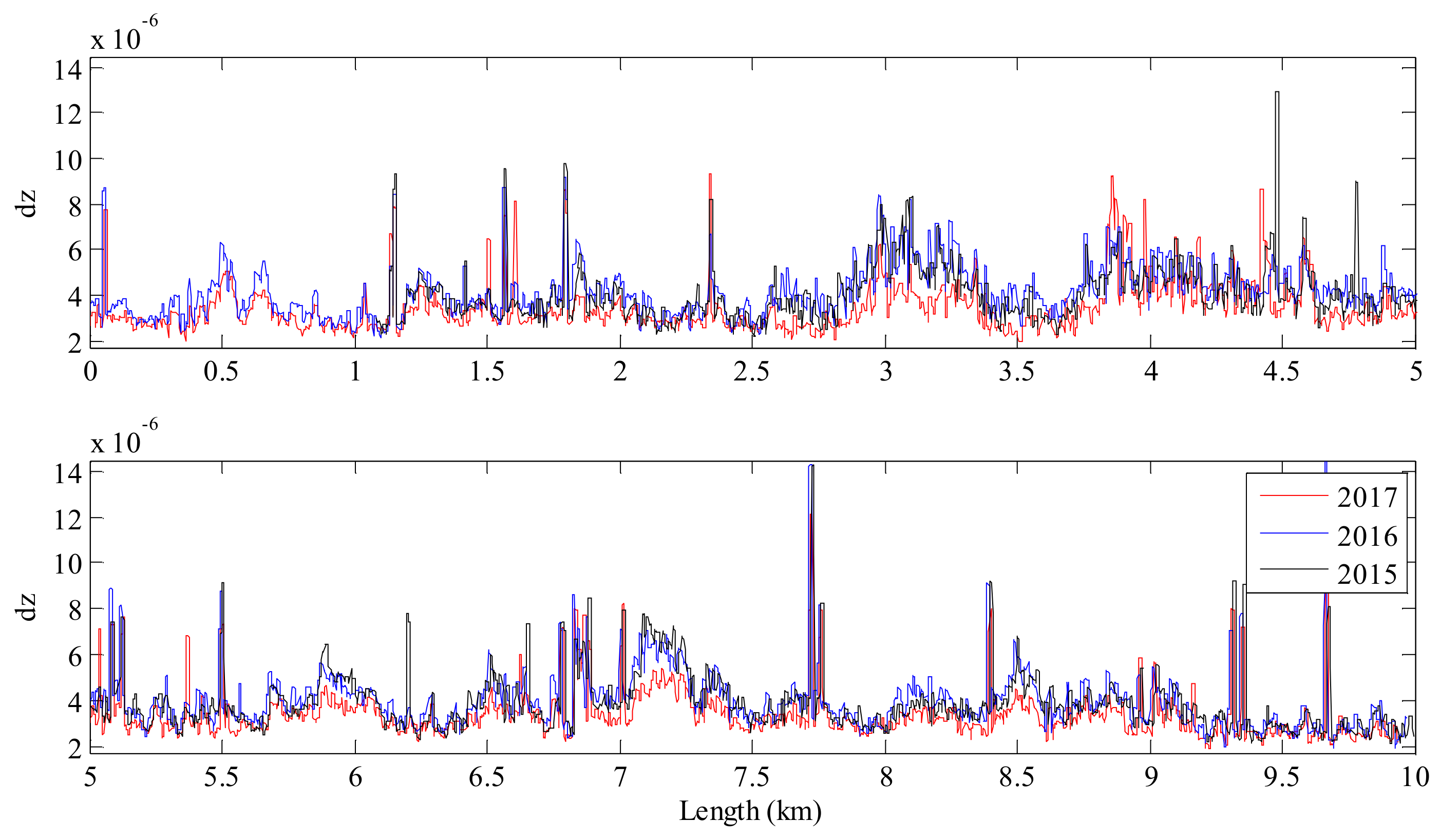
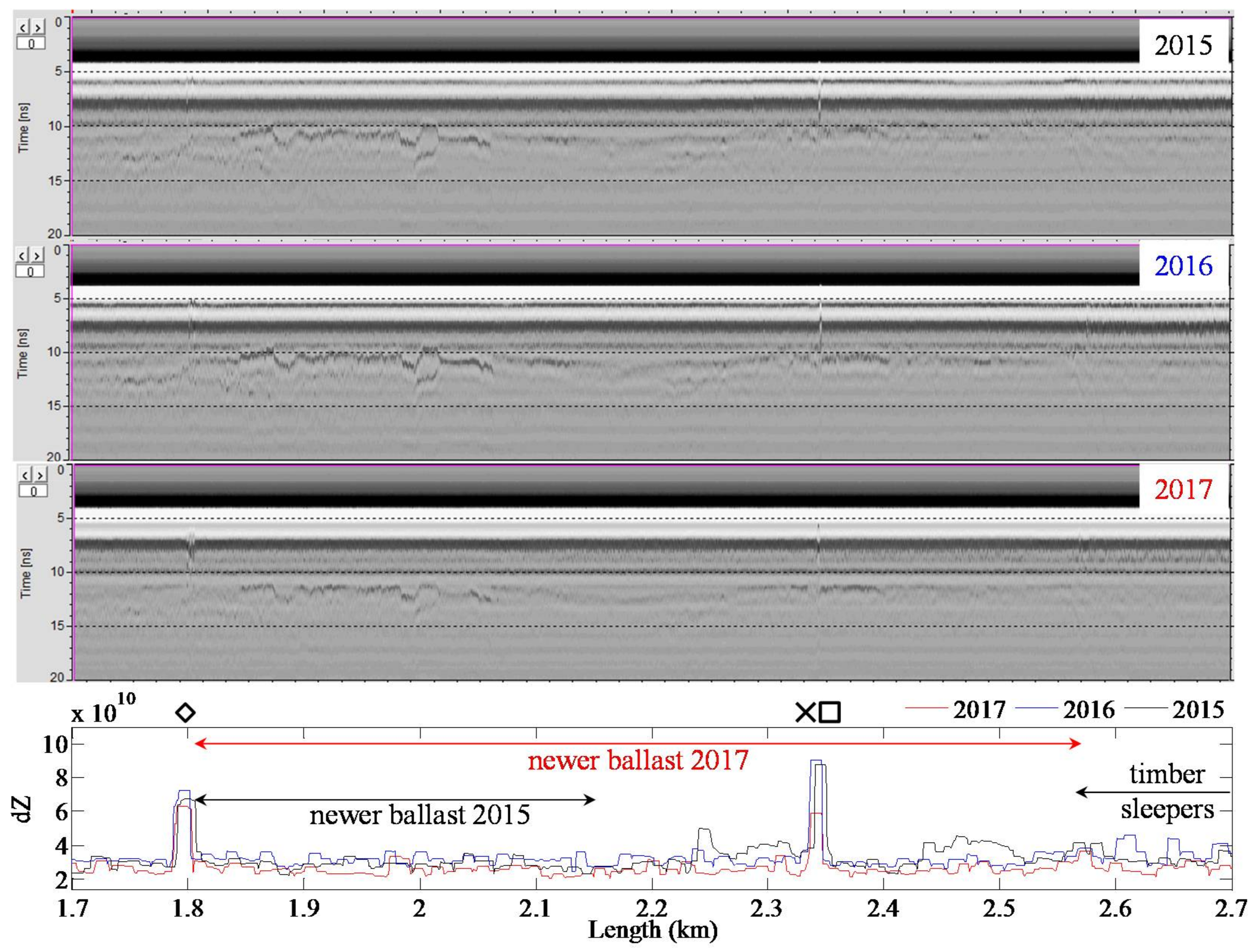
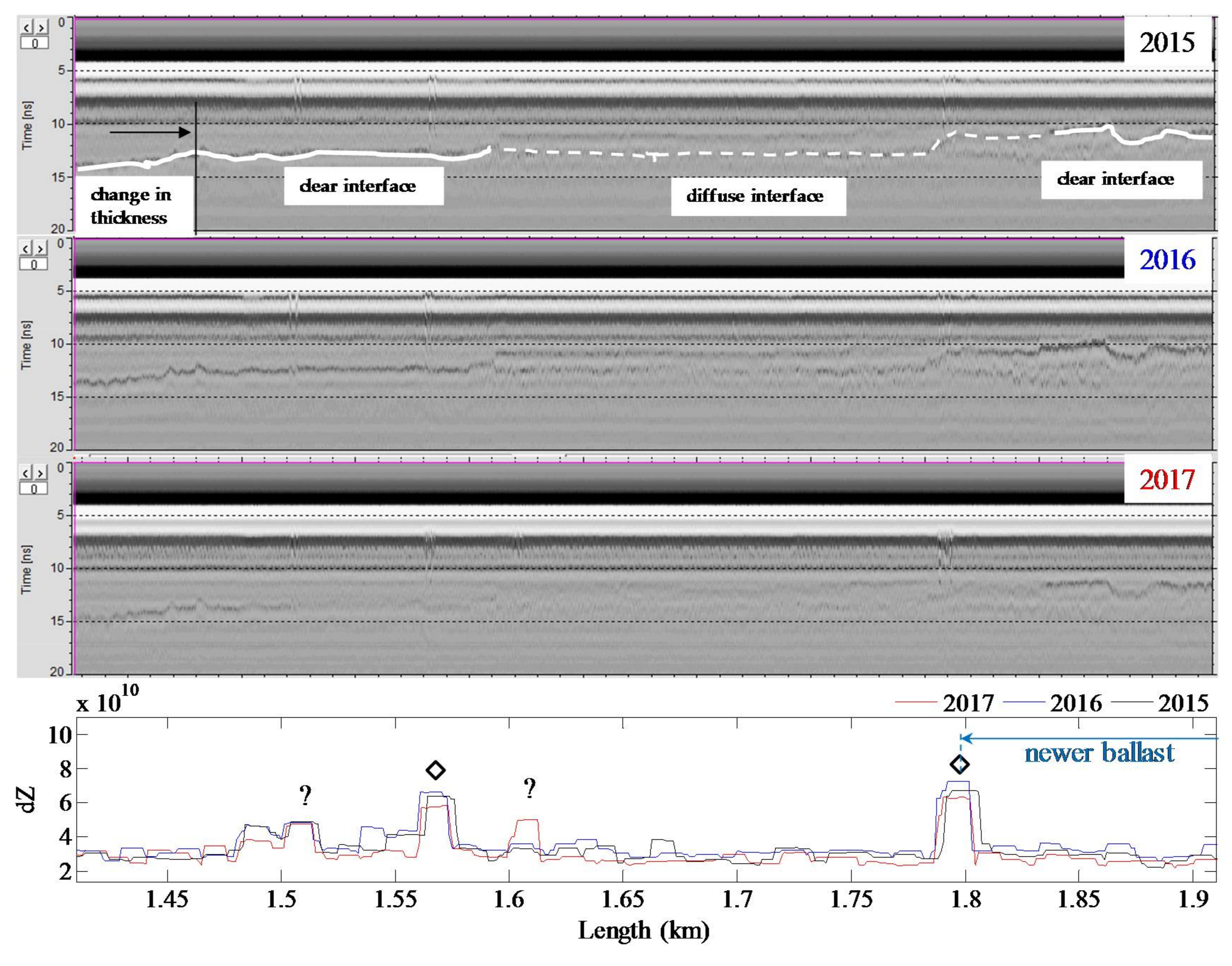
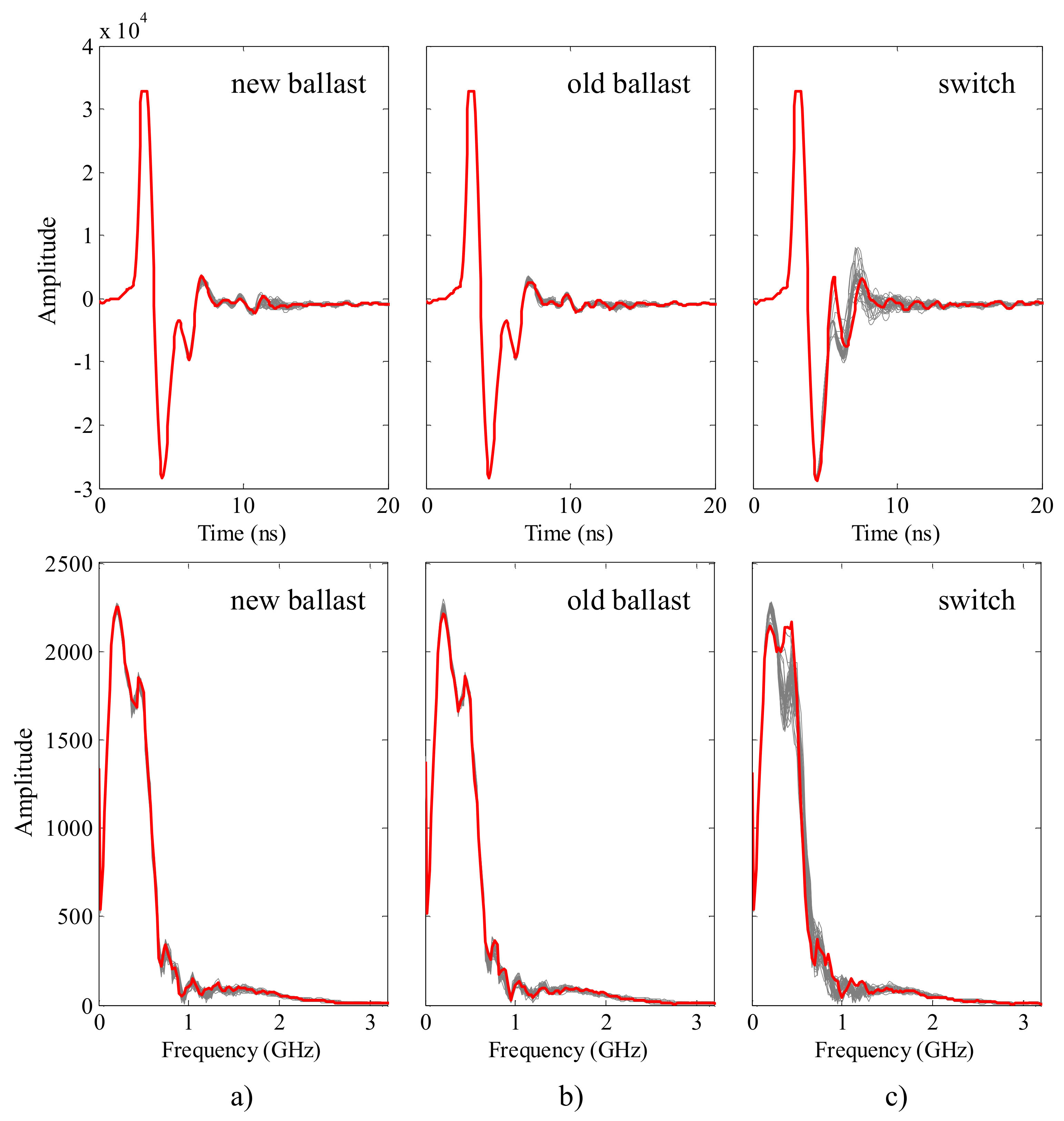
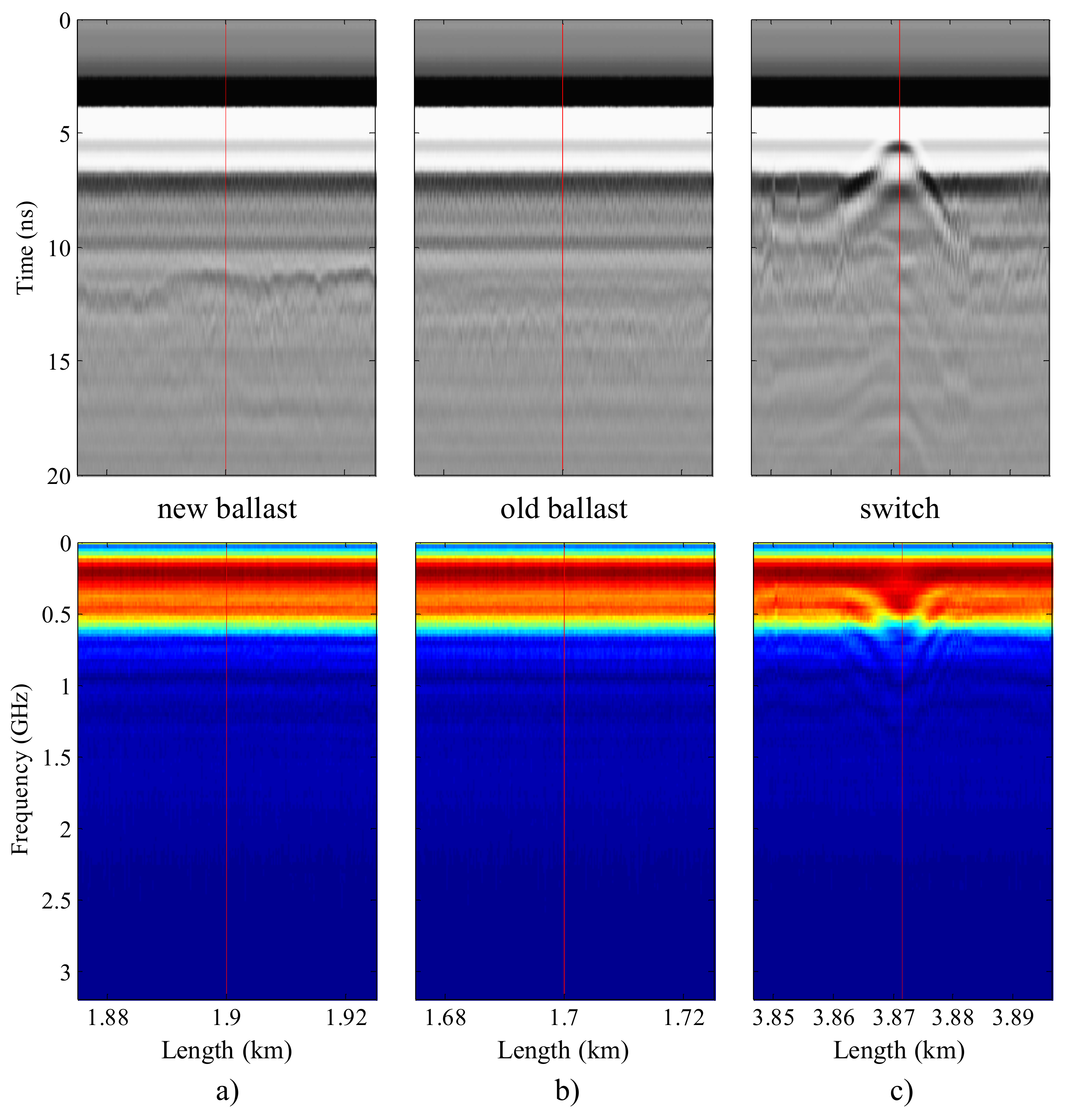
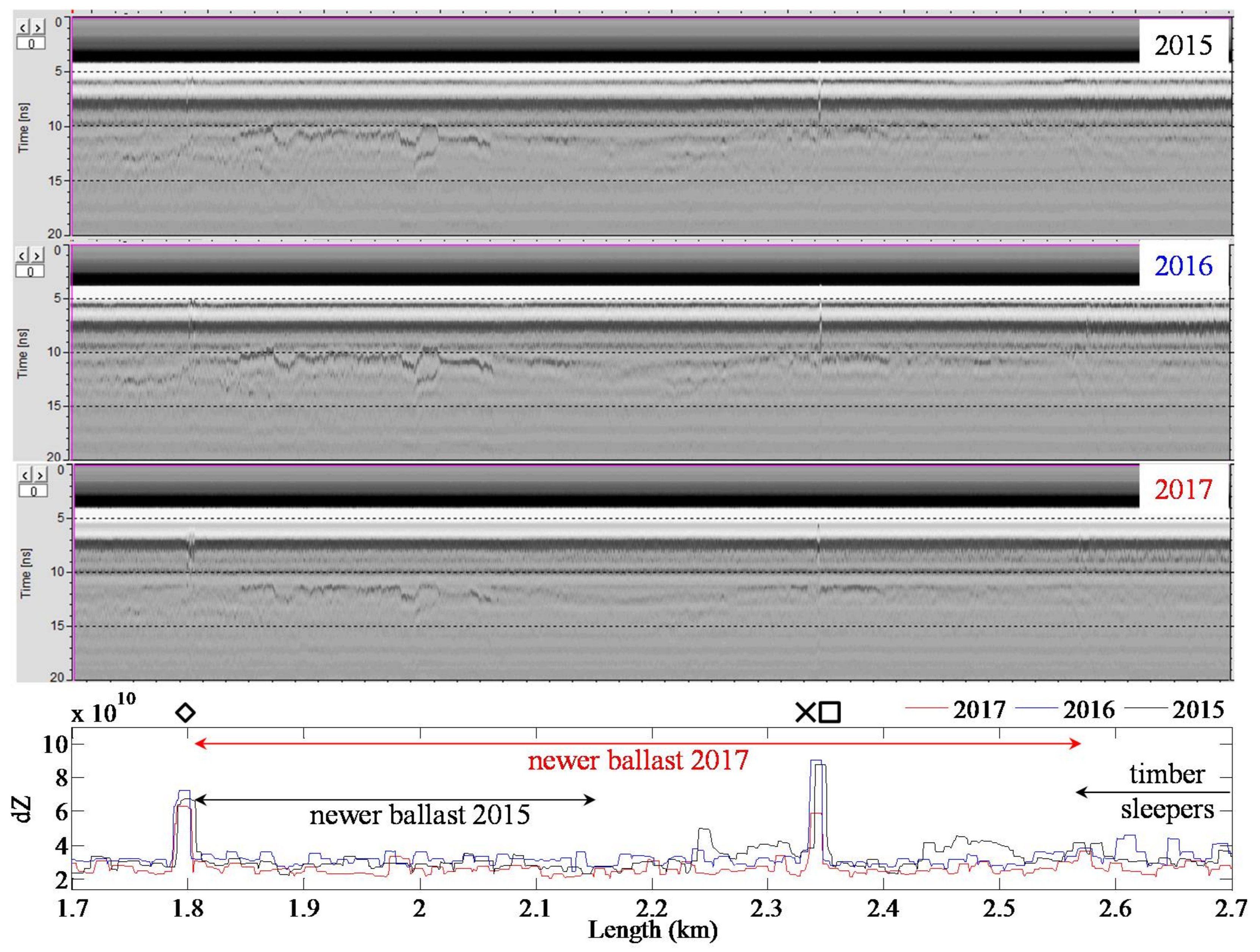
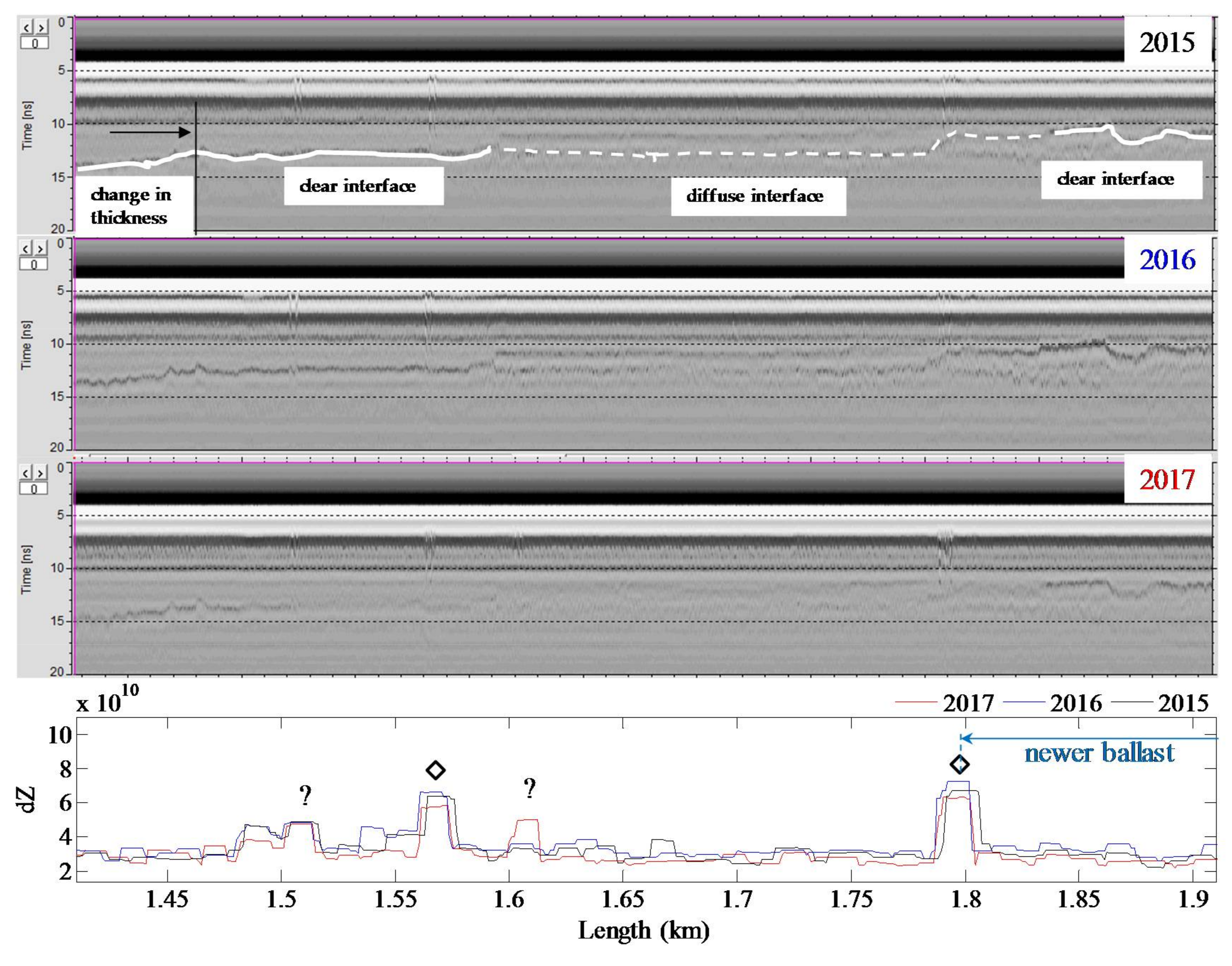
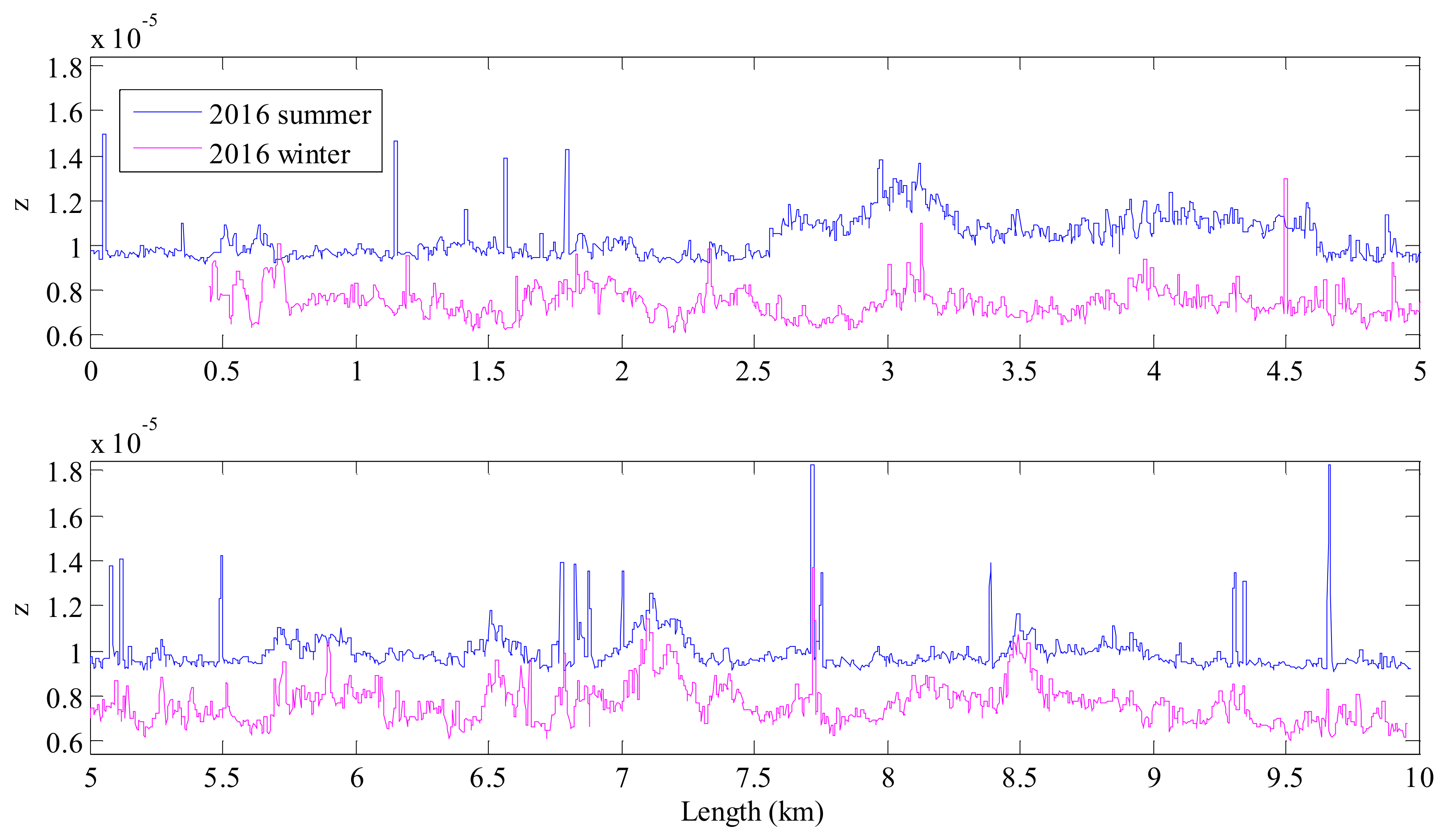
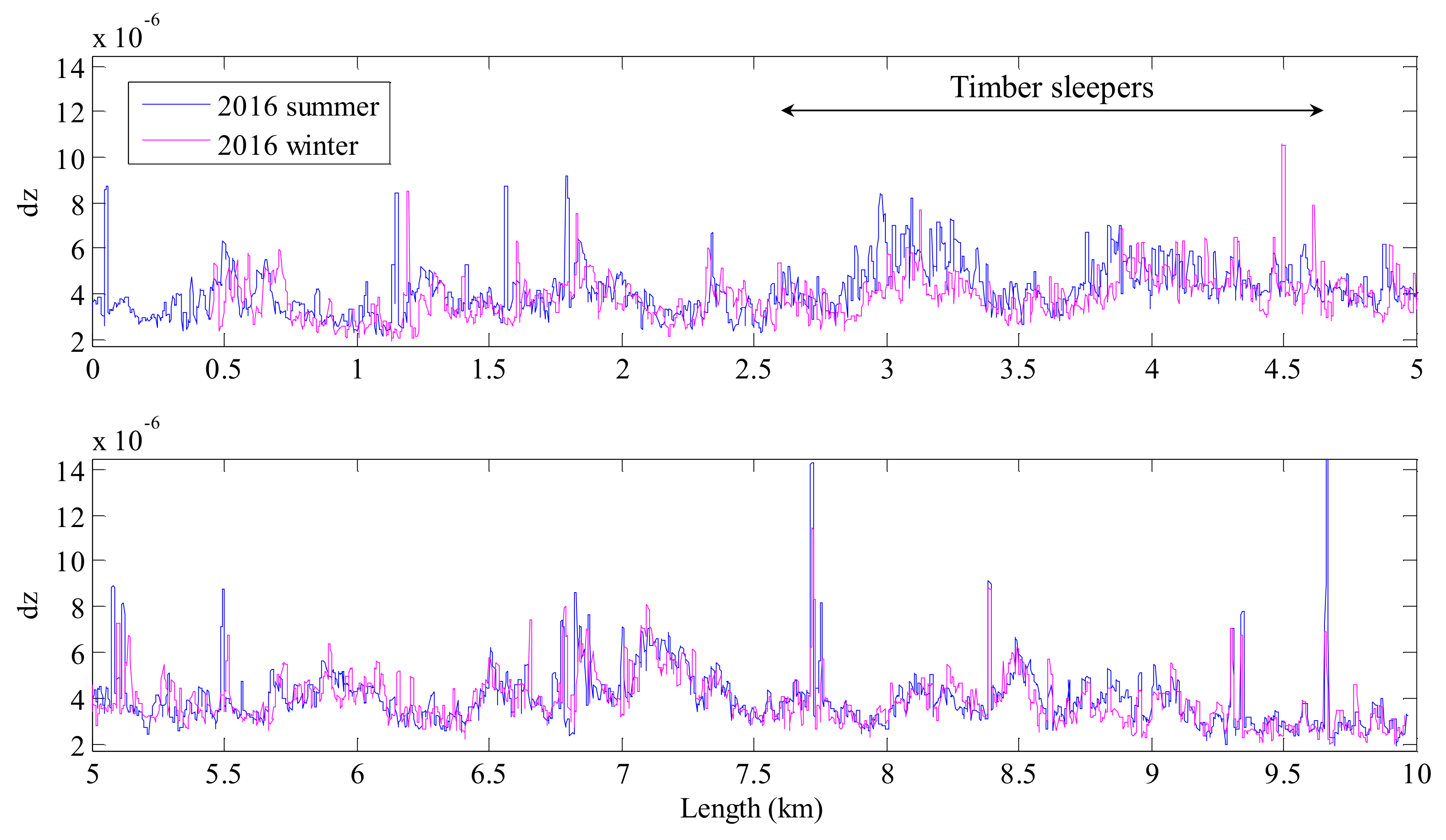
- In the time domain, several in situ GPR measurements performed on existing lines, with different characteristics (sleeper’s type and material, ballast fouling level, age of the track, with and without sub-ballast layer) were analysed [2]. Based on this analysis, a time window between 7 ns and 16 ns was selected for this study (see, for example Figure 1 and Figure 2), which was considered representative of the conditions of the ballast and subgrade.
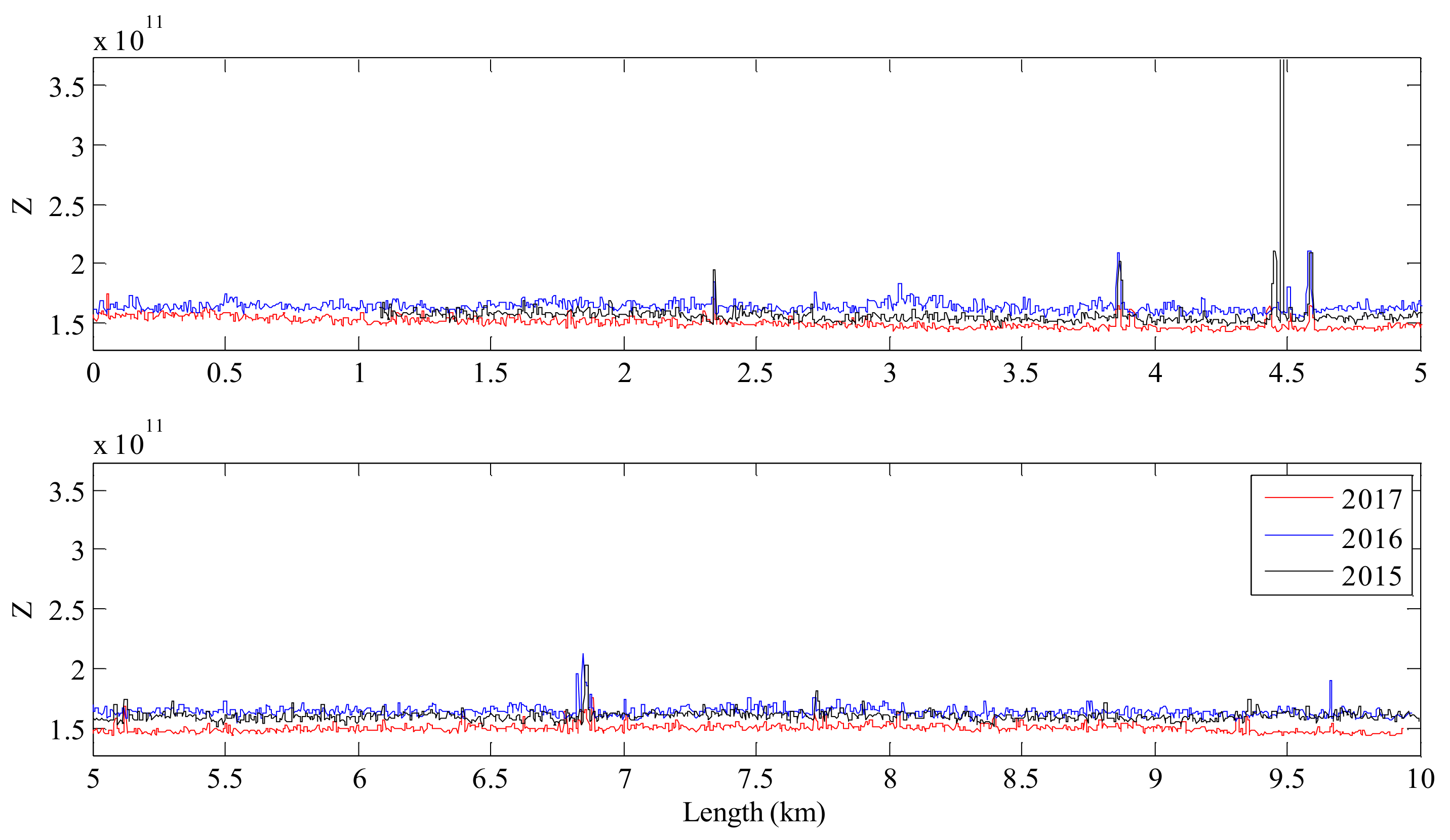
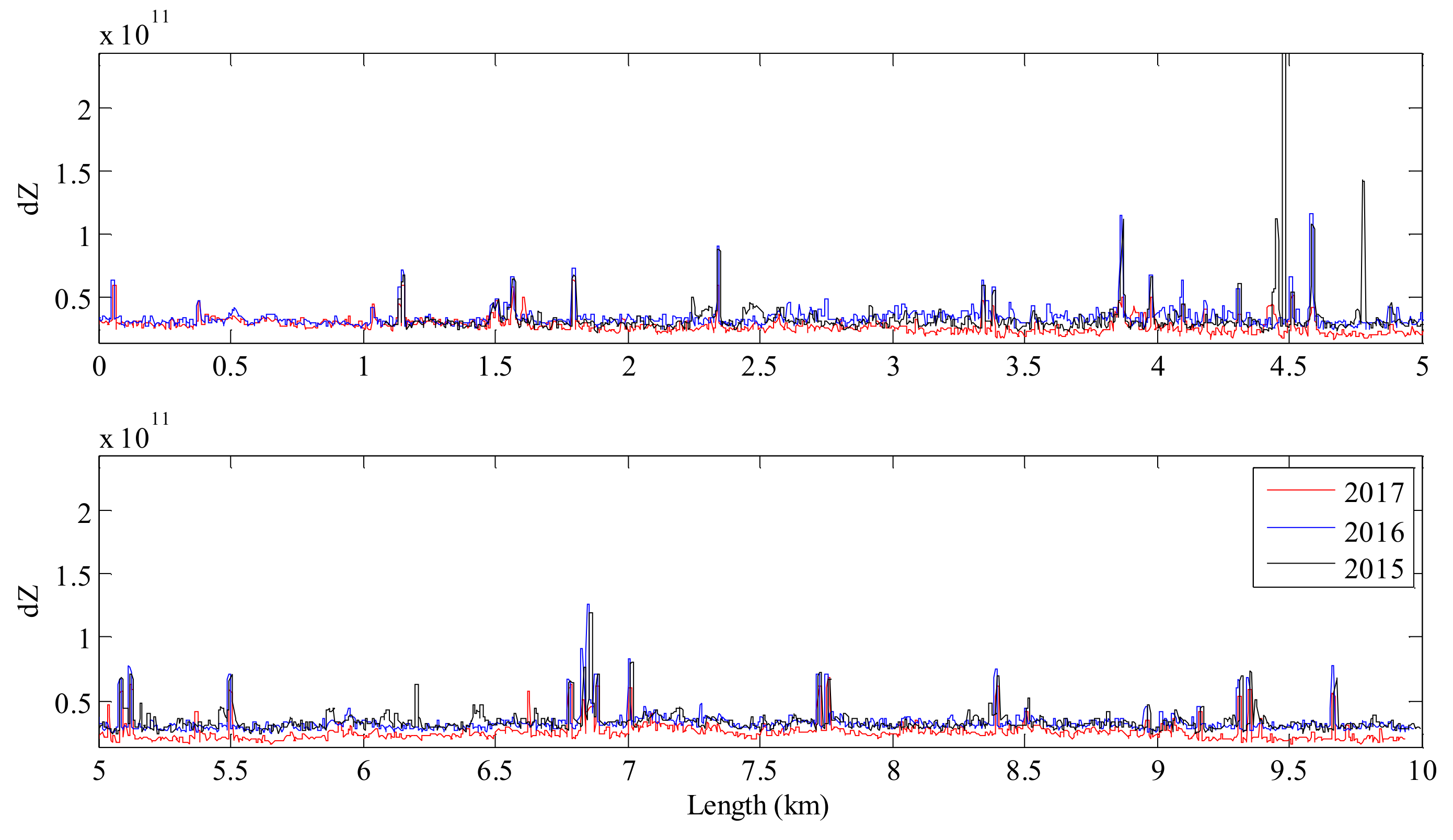
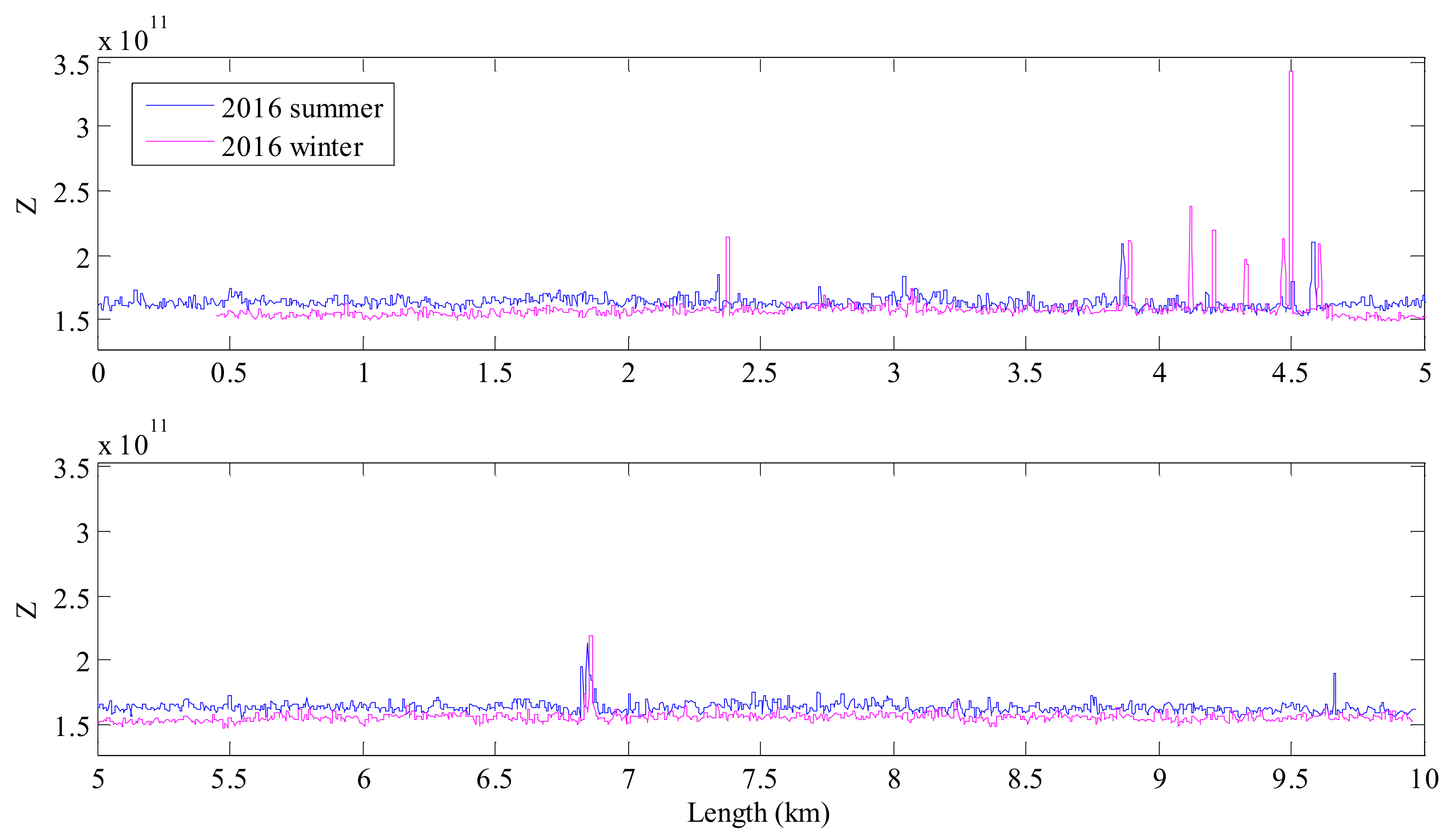
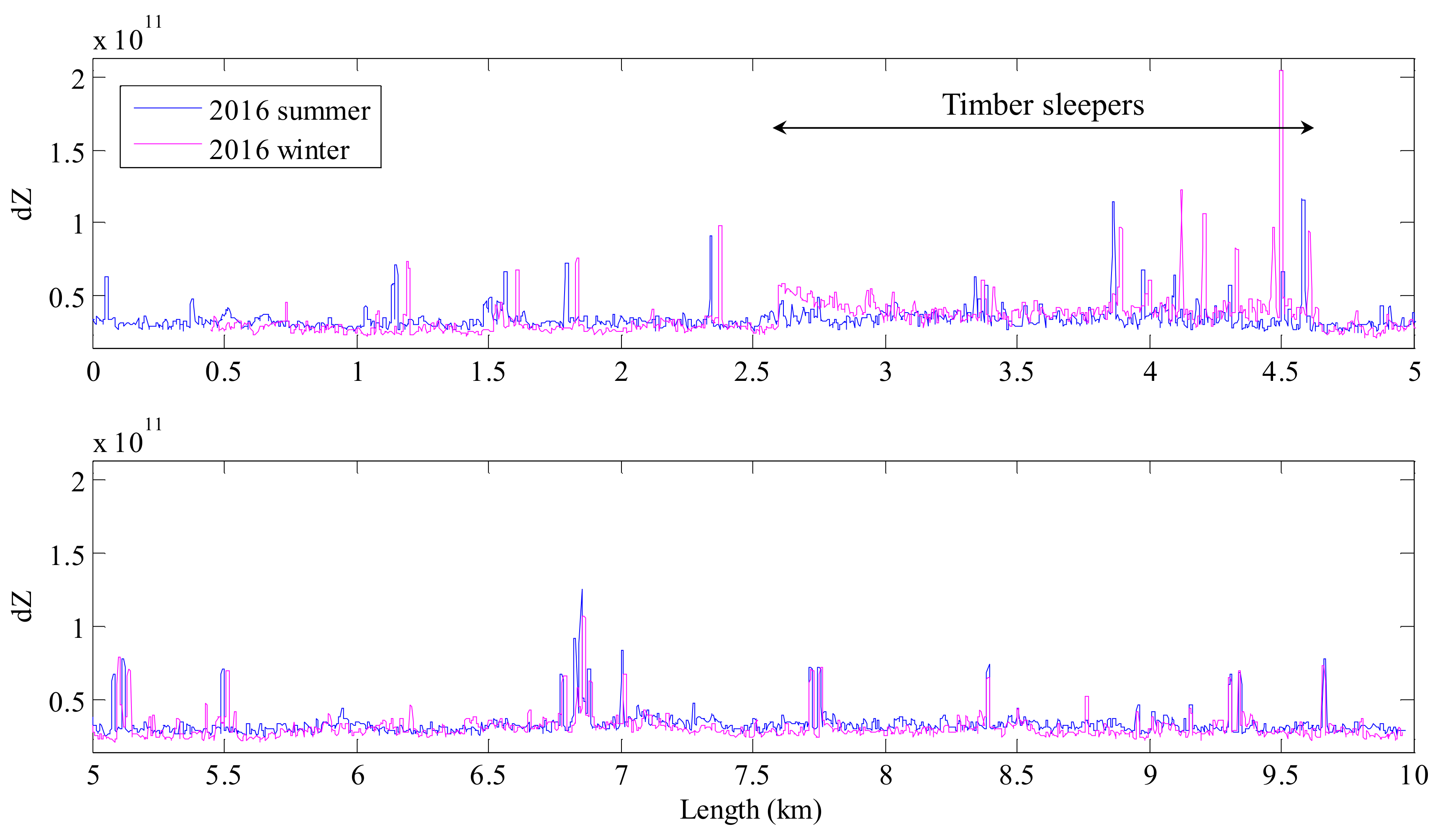
- In the frequency domain, numerous in situ GPR data were analysed in order to detect areas of the electromagnetic spectrum affected by changes occurring along the track. A range between 0.7 GHz and 2.0 GHz was selected (see for example Figure 1 and Figure 2). The changes induced by elements of the superstructure such as switches, sleepers and level crossings, are generally registered at lower frequencies (below 0.7 GHz), they were excluded because the main purpose was to detect ballast and substructure pathologies. The selection of the frequency range is in accordance with the information in the literature [15,63].
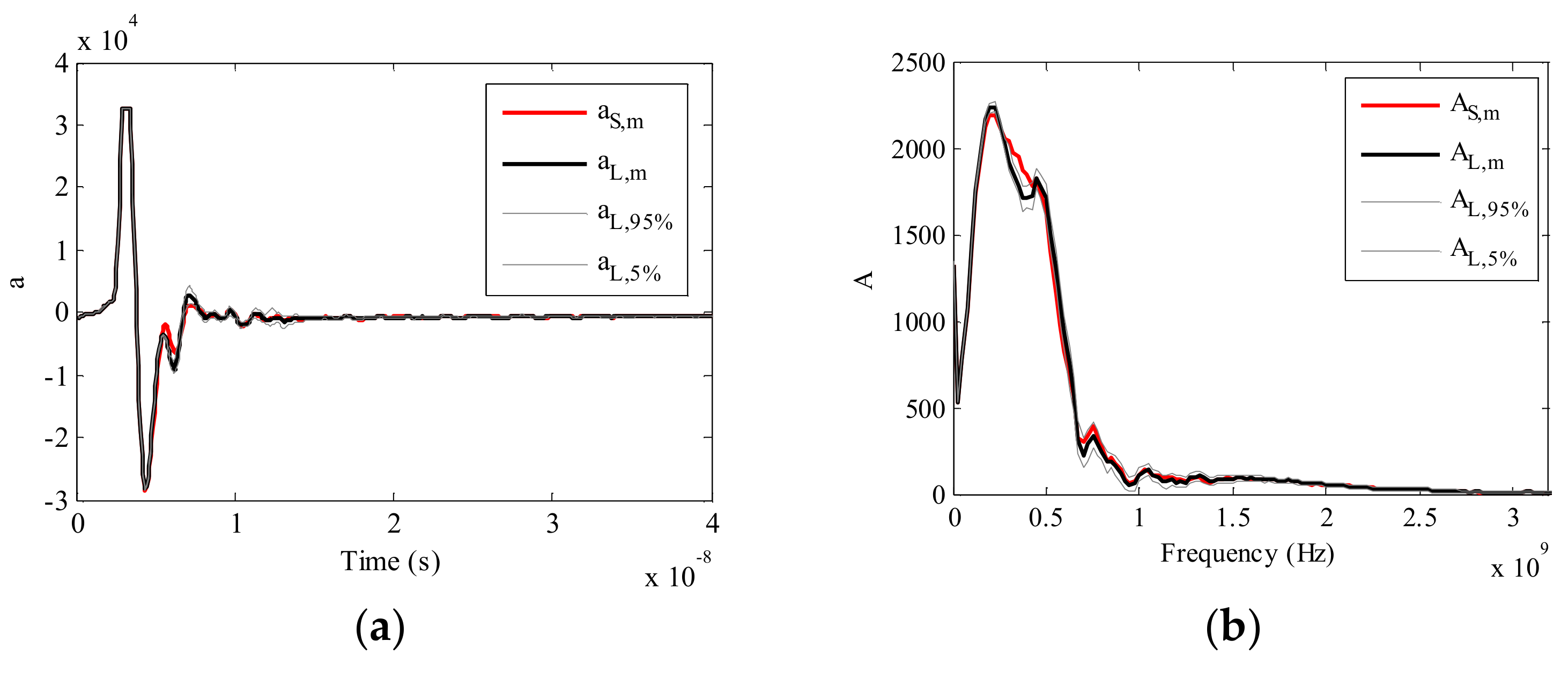
3.2.2. Sliding Window for Track Changes Detection
- Several dimensions for the long and short windows were tested and also the positioning of the small window within the large one was varied;
3.2.3. GPR Expedite Parameters Definition
- in time domain, and ;
- in frequency domain, and ;
3.3. Example of Signal Processing for Methodology Implementation
4. Application of the New Method to a Case Study and Discussion of Results
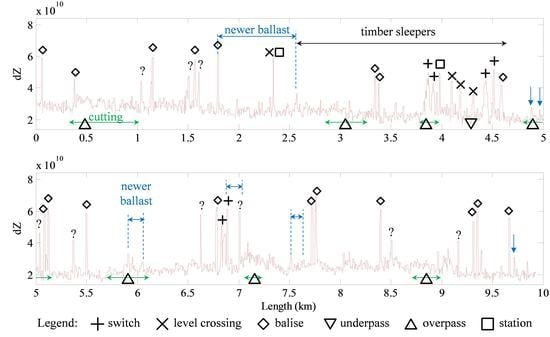
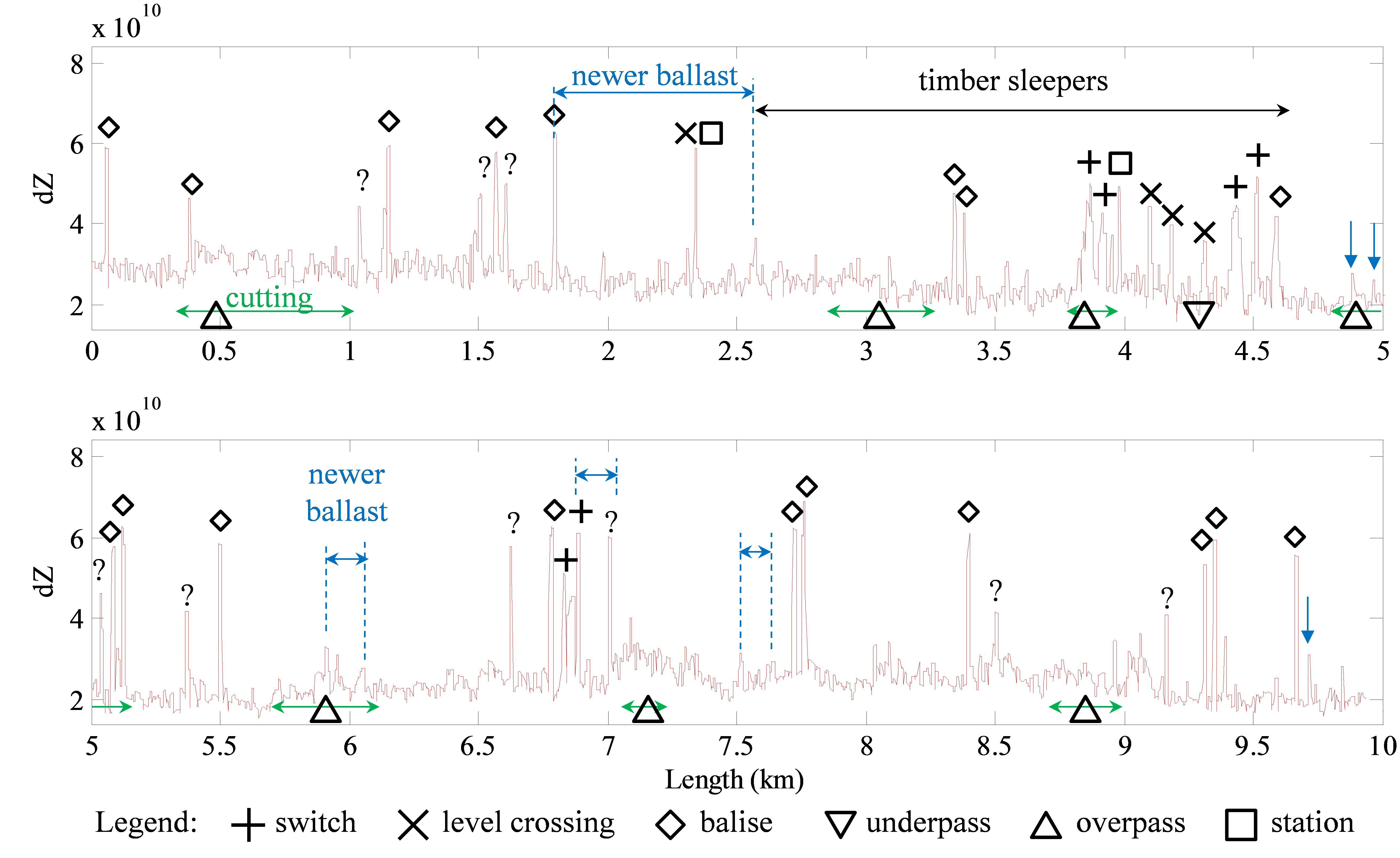
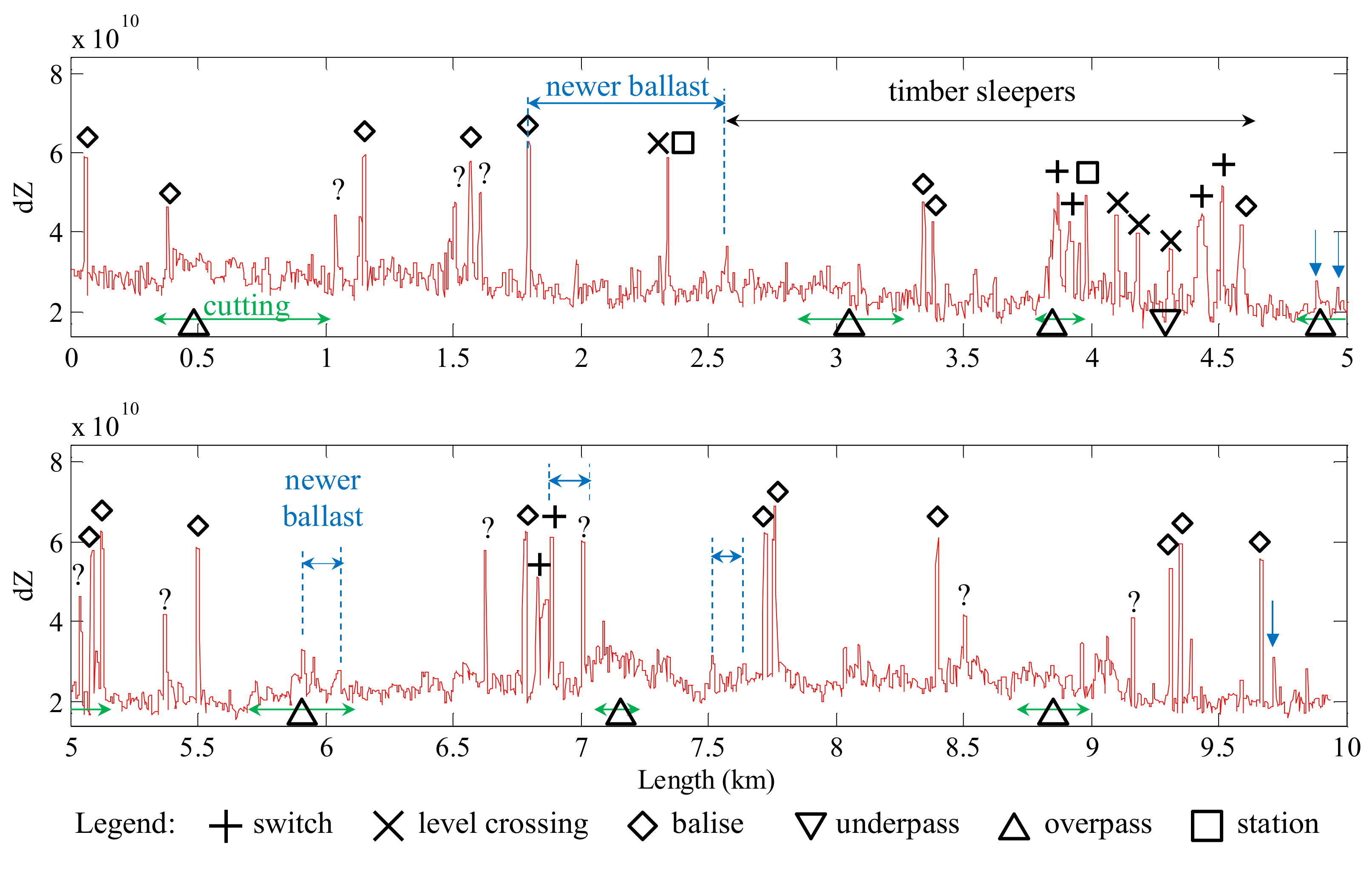
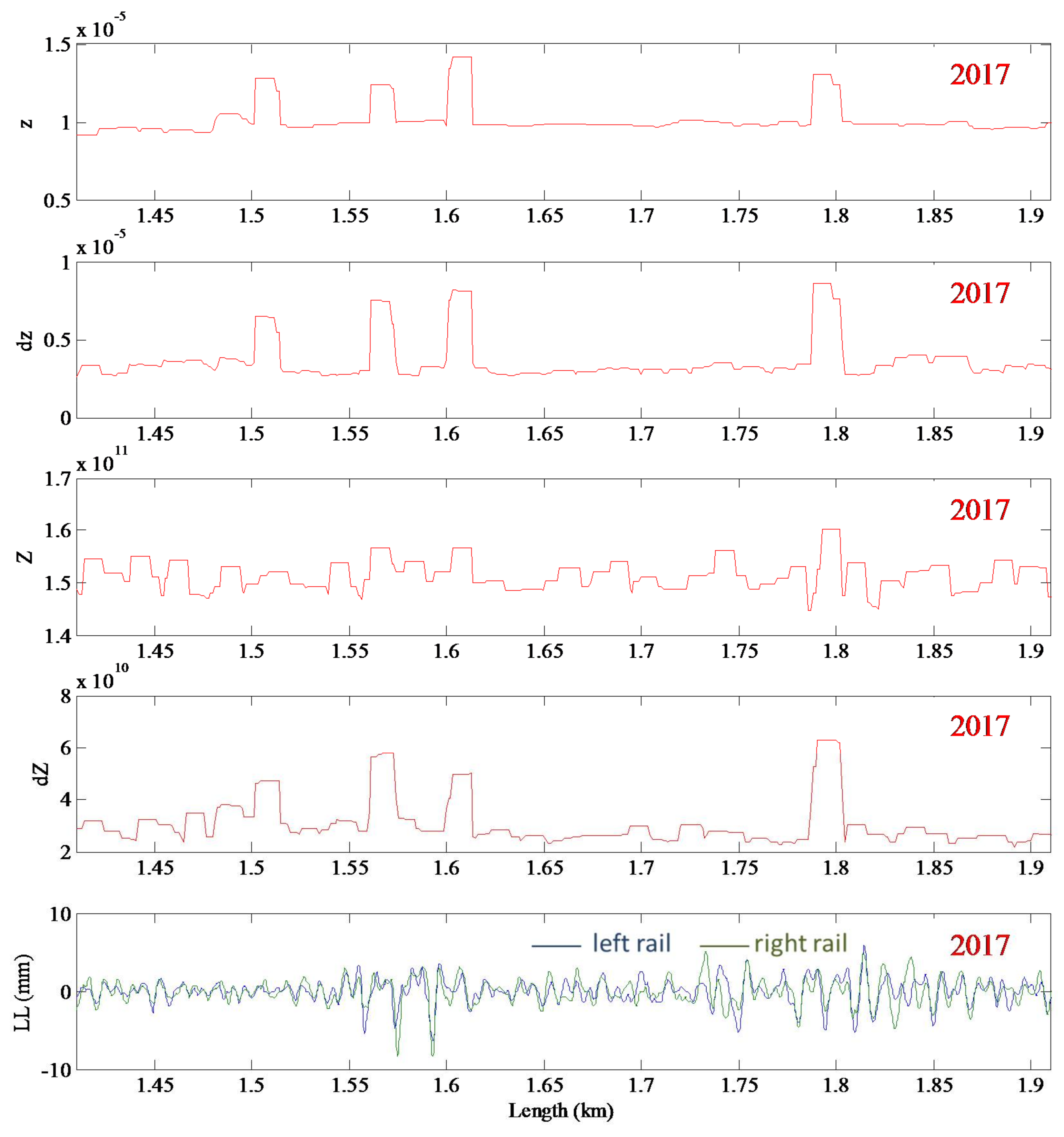
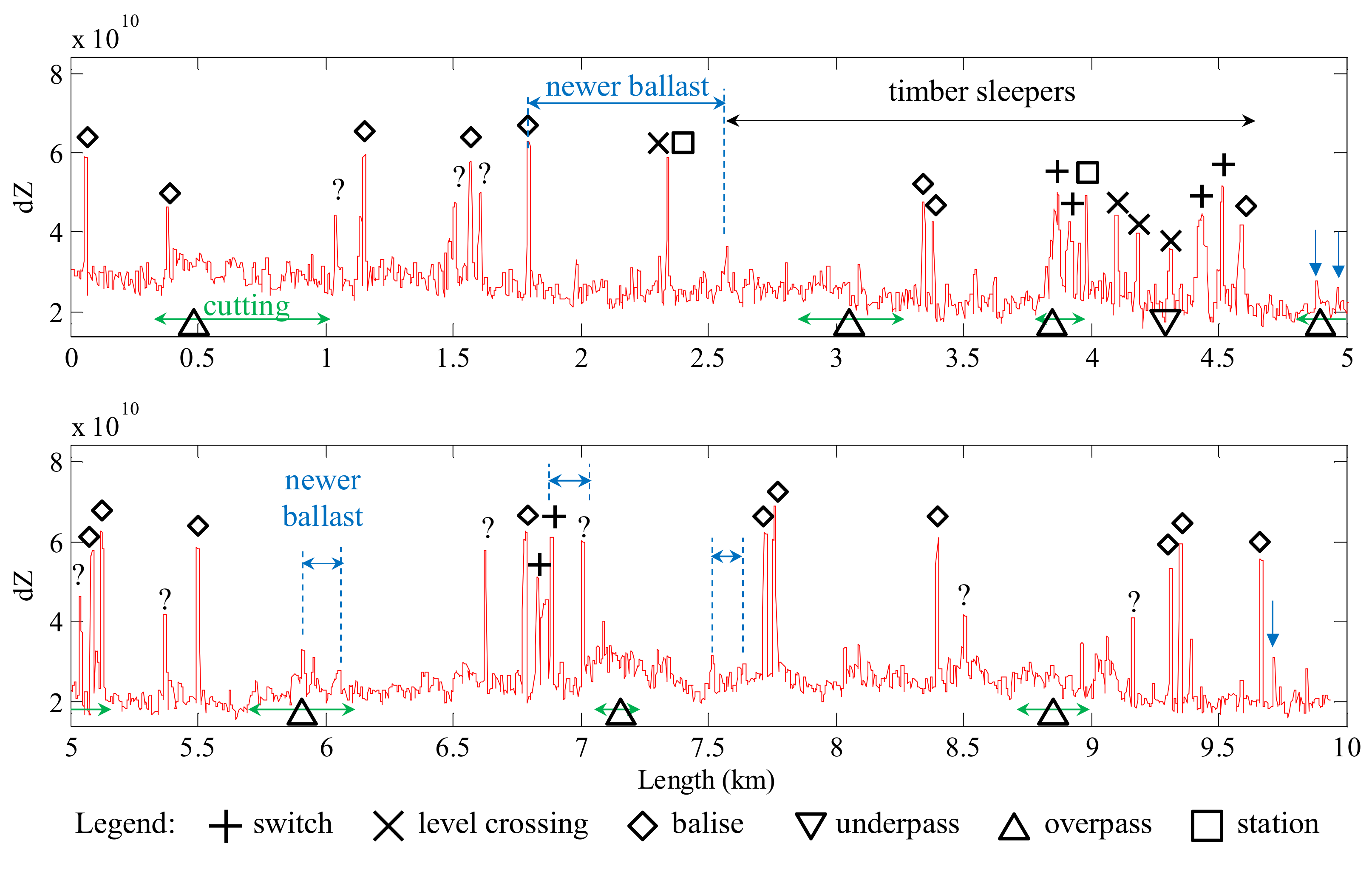
4.1. Event Identification
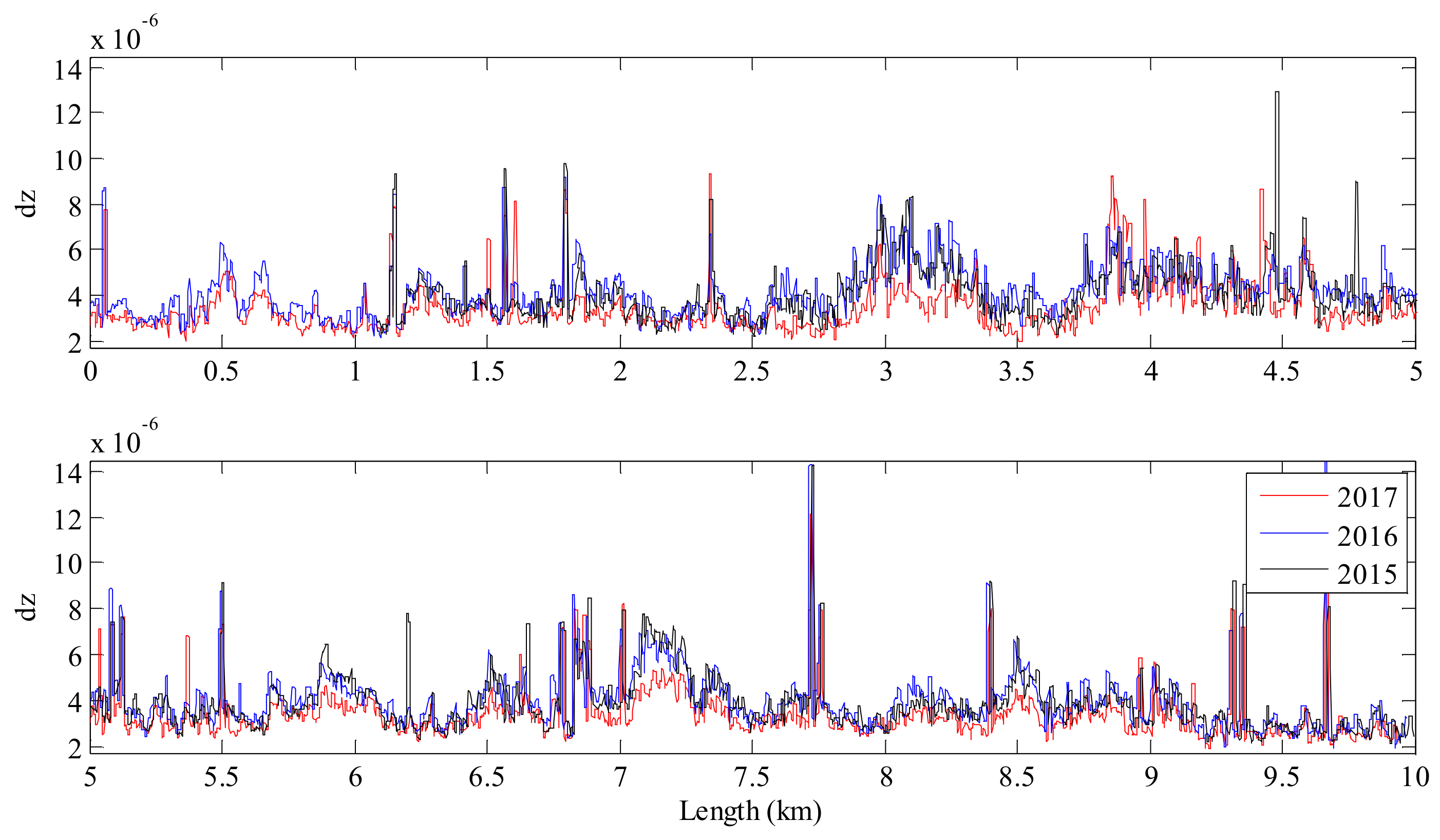
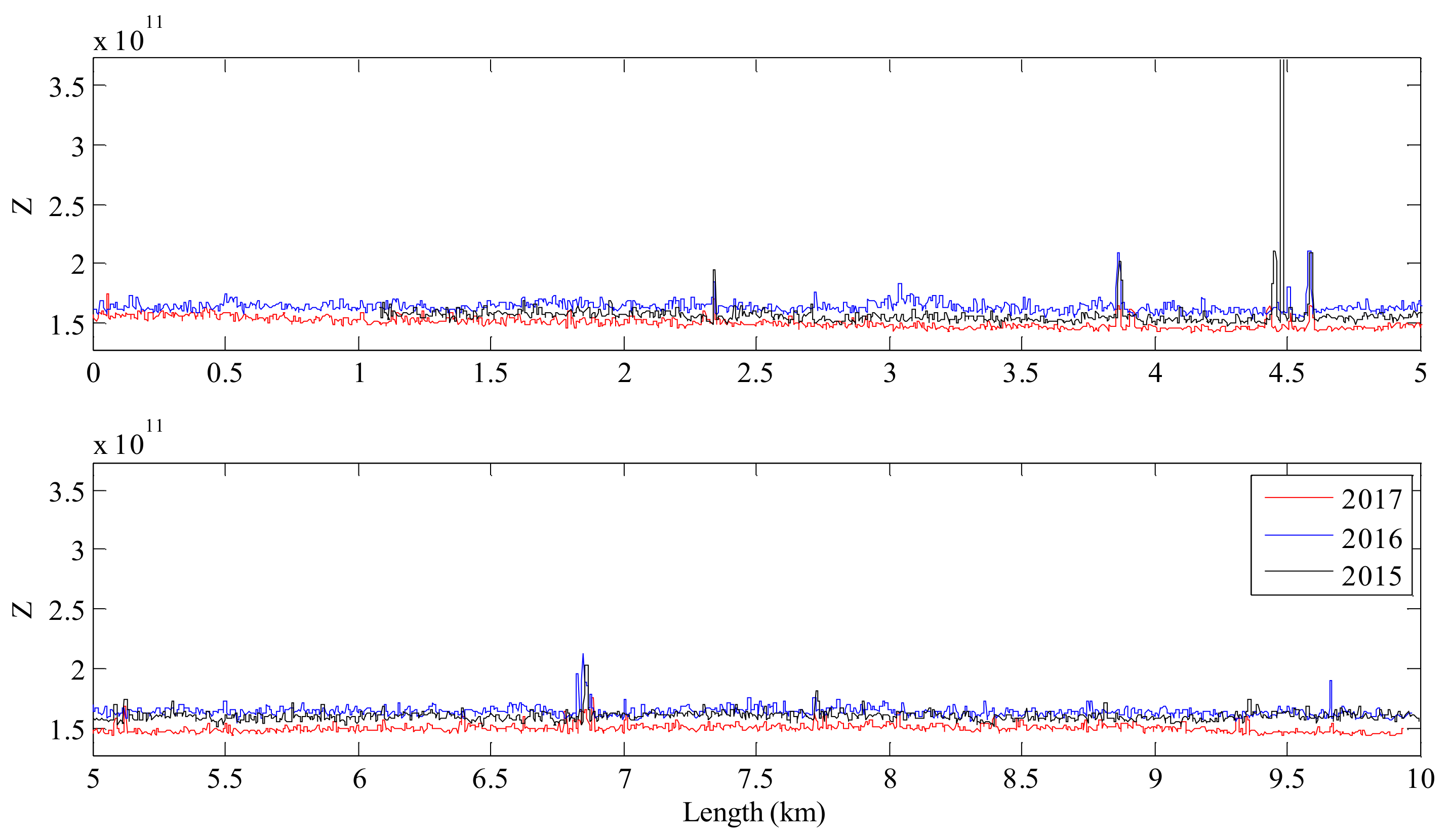
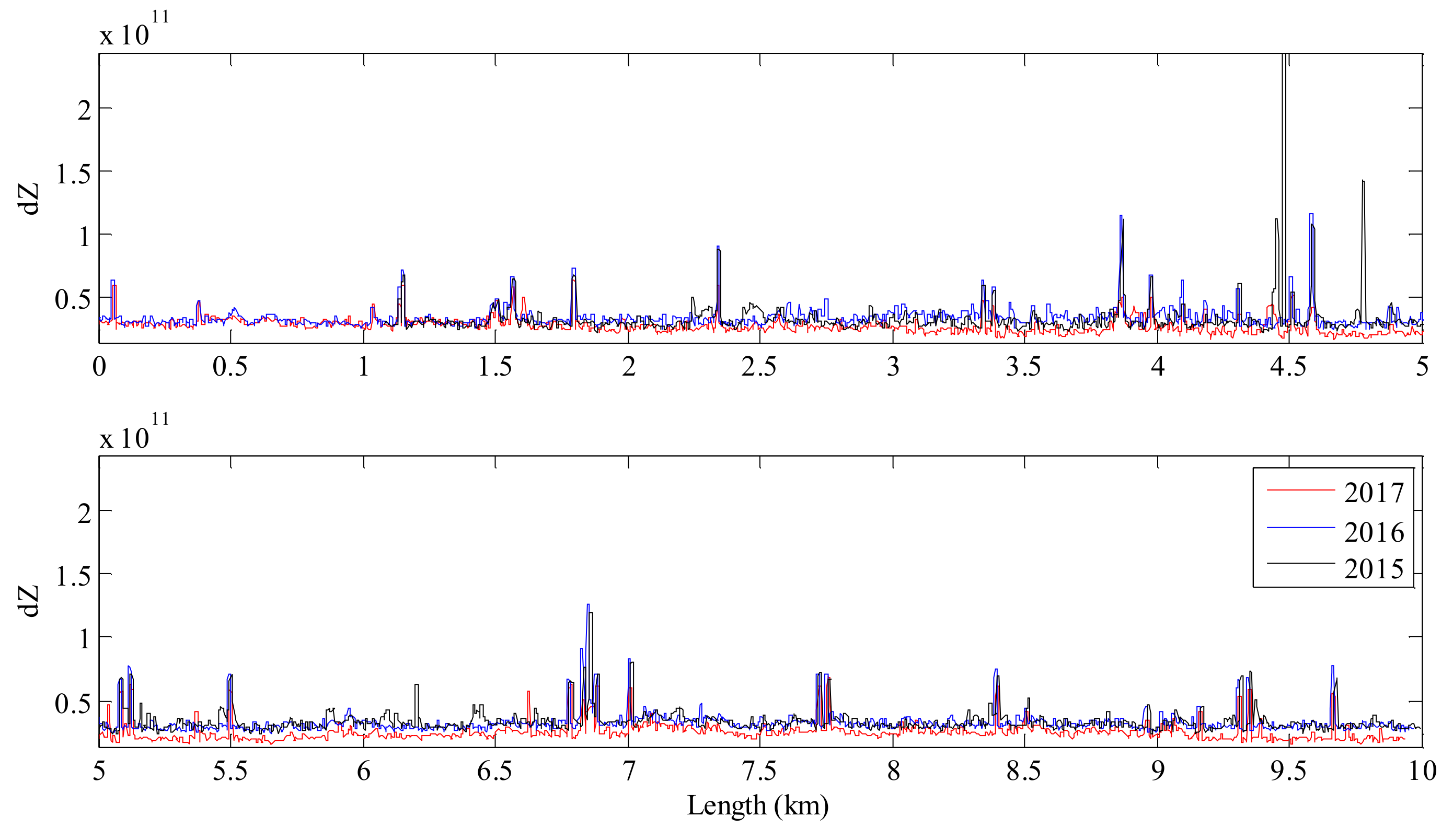
4.2. Sistematic Comparison between Consecutive Campaigns
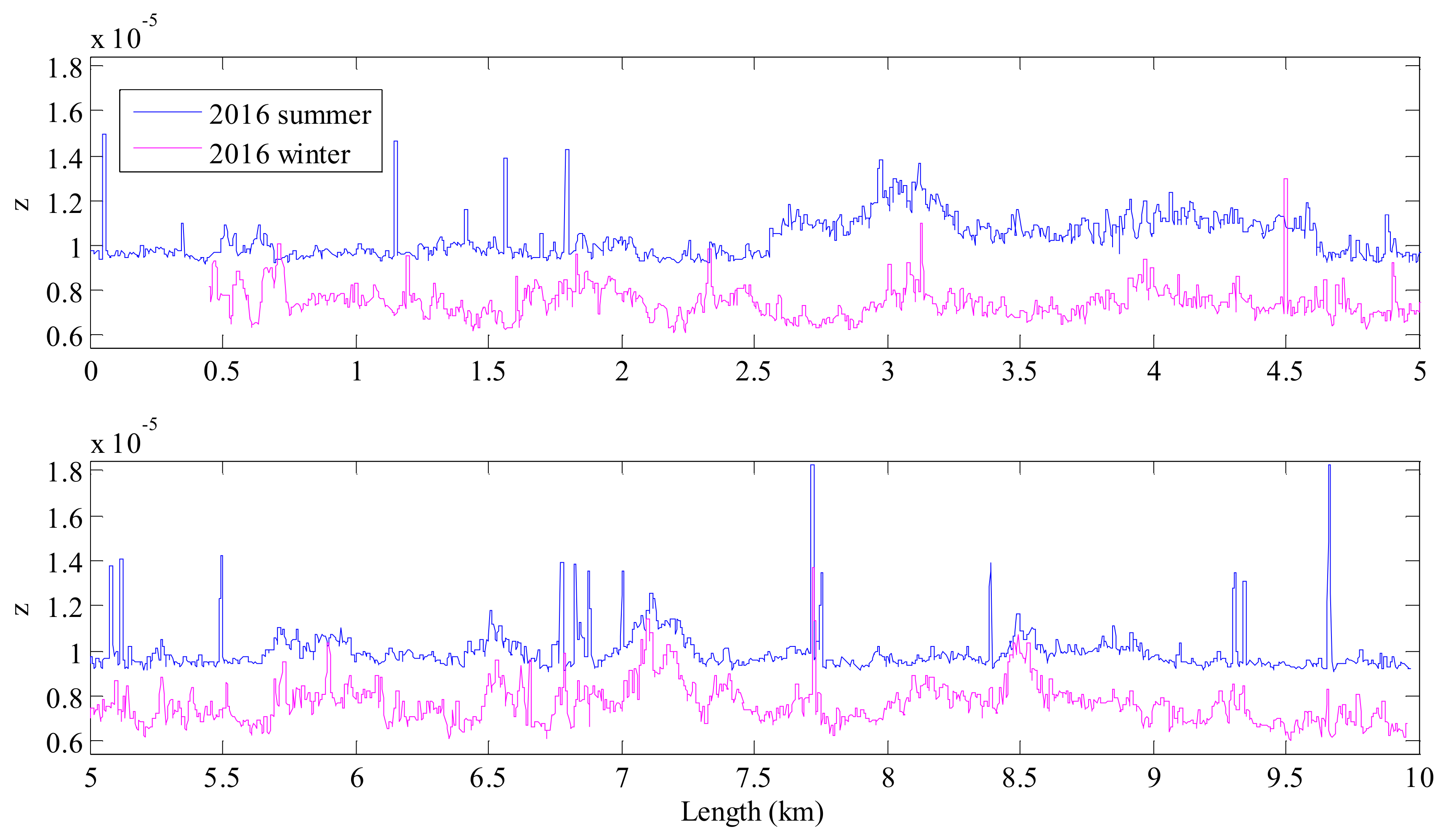
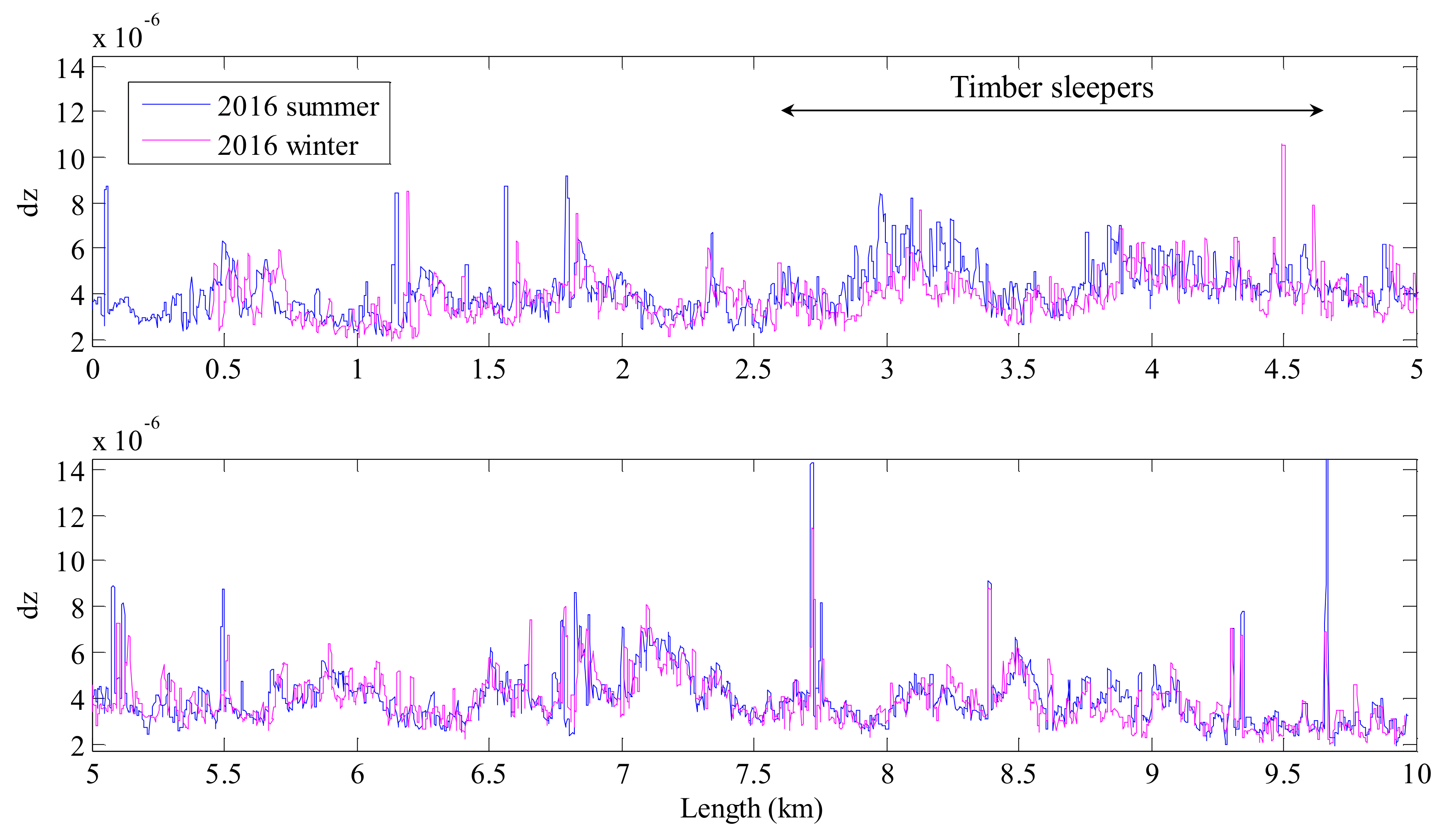
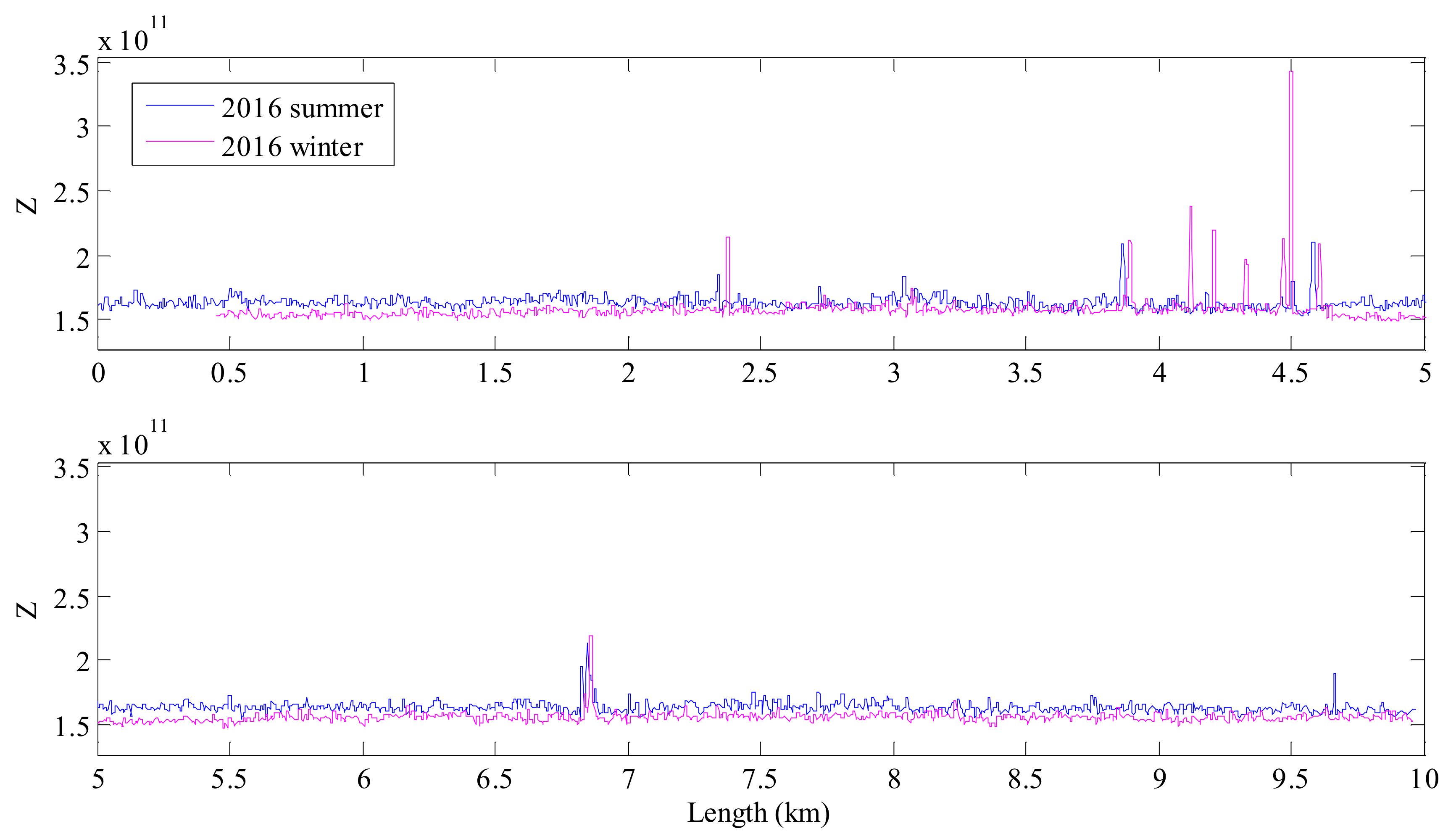
4.3. Analysis of Seasonal Influence on the GPR Data
4.4. Final Remarks
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Esveld, C. Modern Railway Track; MRT-Productions: Zaltbommel, The Netherlands, 2001. [Google Scholar]
- De Chiara, F. Improving of Railway Track Diagnosis Using Ground Penetrating Radar. Ph.D. Thesis, University of Rome “Sapienza”, Rome, Italy, 2014. [Google Scholar]
- Berggren, E. Railway Track Stiffness: Dynamic Measurements and Evaluation for Efficient Maintenance. Ph.D. Thesis, KTH, Stockholm University, Stockholm, Sweden, 2009. [Google Scholar]
- Hyslip, J.P.; Chrismer, S.; LaValley, M.; Wnek, J. Track Quality from the Ground Up. In Proceedings of the AREMA Conference, Chicago, IL, USA, 16–19 September 2012. [Google Scholar]
- Fontul, S.; Fortunato, E.; De Chiara, F. Non-Destructive Tests for Railway Infrastructure Stiffness Evaluation. In Proceedings of the 13th International Conference on Civil, Structural and Environmental Engineering Computing; Tsompanakis, T.Y., Ed.; Civil-Comp Press: Stirlingshire, UK, 2011. [Google Scholar]
- Manacorda, G.; Morandi, D.; Sarri, A.; Staccone, G. Customized GPR system for railroad track verification. In Proceedings of the 9th International Conference on Ground Penetrating Radar, Santa Bárbara, CA, USA, 29 April–2 May 2002. [Google Scholar]
- Clark, M.; Gordon, M.; Forde, M.C. Issues over high-speed non-invasive monitoring of railway trackbed. NDT & E Int. 2004, 37, 131–139. [Google Scholar] [CrossRef]
- Plati, C.; Loizos, A. Using ground-penetrating radar for assessing the structural needs of asphalt pavements. Nondestruct. Test. Eval. 2012, 27, 273–284. [Google Scholar] [CrossRef]
- Gallagher, G.P.; Leiper, Q.; Williamson, R.; Clark, M.R.; Forde, M.C. The application of time domain ground penetrating radar to evaluate railway track ballast. NDT & E Int. 1999, 32, 463–468. [Google Scholar] [CrossRef]
- Gobel, C.; Hellmann, R.; Petzold, H. Georadar-model and in-situ investigations for inspection of railway tracks. In Proceedings of the 5th International Conference on Ground Penetrating Radar, Kitchener, ON, Canada, 12–16 June 1994. [Google Scholar]
- Loizos, A.; Silvast, M.; Dimitrellou, S. Railway trackbed assessment using the GPR technique. Adv. Charact. Pavement Soil Eng. Mater. 2007, 1, 1817–1826. [Google Scholar]
- Vorster, D.J.; Gräbe, P.J. The use of ground-penetrating radar to develop a track substructure characterisation model. J. S. Afr. Inst. Civ. Eng. 2013, 55, 69–78. [Google Scholar]
- Nurmikolu, A. Key aspects on the behaviour of the ballast and substructure of a modern railway track: Research-based practical observations in Finland. J. Zhejiang Univ. Sci. A 2012, 13, 825–835, ISSN 1673-565X (Print); ISSN 1862-1775 (Online). [Google Scholar] [CrossRef]
- Hyslip, J.P.; Smith, S.S.; Olhoeft, G.R.; Selig, E.T. Assessment of railway track substructure condition using ground penetrating radar. In Proceedings of the 2003 Annual Conference of AREMA, Chicago, IL, USA, 5–8 Octorber 2003. [Google Scholar]
- Silvast, M.; Levomaki, M.; Nurmikolu, A.; Noukka, J. NDT techniques in railway structure analysis. In Proceedings of the 7th World Congress on Railway Research, Montreal, QC, Canada, 4–8 June 2006. [Google Scholar]
- Shao, W.; Bouzerdoum, A.; Phung, S.L.; Su, L.; Indraratna, B.; Rujikiatkamjorn, C. Automatic classification of ground-penetrating-radar signals for railway-ballast assessment. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3961–3972. [Google Scholar] [CrossRef]
- Shangguan, P.; Al-Qadi, I.L.; Leng, Z. Development of Wavelet Technique to Interpret Ground-Penetrating Radar Data for Quantifying Railroad Ballast Conditions. Transp. Res. Rec. J. Transp. Res. Board 2012, 2289, 95–102. [Google Scholar] [CrossRef]
- Hermann, M.; Pentek, T.; Otto, B. Design Principles for Industrie 4.0 Scenarios. In Proceedings of the 49th Hawaii International Conference on System Sciences (HICSS), Koloa, HI, USA, 5–8 January 2016. [Google Scholar] [CrossRef]
- Santos, C.; Mehrsai, A.; Barros, A.C.; Araújo, M.; Ares, E. Towards Industry 4.0: An overview of European strategic roadmaps. Procedia Manuf. 2017, 13, 972–979. [Google Scholar] [CrossRef]
- Riveiro, B.; Solla, M. (Eds.) Non-Destructive Techniques for the Evaluation of Structures and Infrastructure; CRC Press: London, UK, 2016; ISBN 9781138028104. [Google Scholar]
- Sandoval, S.; Mínguez, R.; Nestares, E.; Carbó, A. Multidisciplinary Study of a Ballast Collapse in a High-Speed Railway Track in Spain. In Proceedings of the 6th International Conference on Applied Geophysics for Environmental and Territorial System Engineering AGE, Iglesias, Italy, 28–30 April 2011. [Google Scholar]
- Barta, J. A methodology for geophysical investigation of track defects. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2010, 224, 237–244. [Google Scholar] [CrossRef]
- Fortunato, E.; Bille, J.; Marcelino, J. Application of spectral analysis of surface waves (SASW) in the characterisation of railway platforms. In Advanced Characterisation of Pavement and Soil Engineering Materials; Loizos, A., Scarpas, T., Al-Qadi, I.L., Eds.; Taylor & Francis Group: London, UK, 2007. [Google Scholar]
- Szwilski, A.B.; Begley, R. Developing an Integrated Track Stability Assessment and Monitoring System Using Non-Invasive Technologies; Transportation Research Board: Washington, DC, USA, January 2003. [Google Scholar]
- Fortunato, E.; Fontul, S.; Paixão, A.; Asseiceiro, F. Case study on the rehabilitation of old railway lines: Experimental field works. In Proceedings of the 9th International Conference on the Bearing Capacity of Roads, Railways and Airfields, Trondheim, Norway, 25–27 June 2013. [Google Scholar]
- Fontul, S.; Fortunato, E.; Paixão, A.; De Chiara, F. Non-destructive tests for evaluation of railway platform. Railways 2012. In Proceedings of the First International Conference on Railways Technology: Research, Development and Maintenance, Las Palmas de Gran Canaria, Spain, 18–20 April 2012. [Google Scholar]
- Saarenketo, T. Electrical Properties of Road Materials and Subgrade Soils and the Use of Ground Penetrating Radar in Traffic Infrastructure Surveys; Oulu University Press: Oulu, Finland, 2006. [Google Scholar]
- Clark, M.R.; Gillespie, R.; Kemp, T.; McCann, D.M.; Forde, M.C. Electromagnetic properties of railway ballast. NDT & E Int. 2001, 34, 305–311. [Google Scholar] [CrossRef]
- Hugenschmidt, J. Railway track inspection using GPR. J. Appl. Geophys. 2000, 43, 147–155. [Google Scholar] [CrossRef]
- Jack, R.; Jackson, P. Imaging attributes of railway track formation and ballast using ground probing radar. NDT & E Int. 1999, 32, 457–462. [Google Scholar] [CrossRef]
- De Bold, R.; O’Connor, G.; Morrisey, J.P.; Forde, M.C. Benchmarking large scale GPR experiments on railway Ballast. Constr. Build. Mater. 2015, 92, 31–42. [Google Scholar] [CrossRef]
- Anbazhagan, P.; Su, L.; Indraratna, B.; Rujikiatkamjorn, C. Model track studies on fouled ballast using ground penetrating radar and multichannel analysis of surface wave. J. Appl. Geophys. 2011, 74, 175–184. [Google Scholar] [CrossRef]
- Fortunato, E.; Pinelo, A.; Matos Fernandes, M. Characterization of the fouled ballast layer in the substructure of a 19th century railway track under renewal. Soils Found. 2010, 50, 55–62. [Google Scholar] [CrossRef]
- Leng, Z.; Al-Qadi, I.L. Railroad Ballast Evaluation Using Ground-Penetrating Radar: Laboratory Investigation and Field Validation. Transp. Res. Rec. J. Transp. Res. Board 2010, 2159, 110–117. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Ciampoli, B.L.; Calvi, A.; Brancadoro, M.G.; Alani, A.M. Railway ballast condition assessment using ground-penetrating radar—An experimental, numerical simulation and modelling development. Constr. Build. Mater. 2017, 140, 508–520. [Google Scholar] [CrossRef]
- Sussmann, T.R.; Maser, K.R.; Kutrubes, D.; Heyns, F.; Selig, E.T. Development of Ground Penetrating Radar for railway infrastructure condition detection. In Proceedings of the Symposium on the Application of Geophysics to Engineering and Environmental Problems, Denver, CO, USA, 4–7 March 2001. RBA-4. [Google Scholar]
- Solla, M.; Fontul, S. Non-destructive tests for railway evaluation: Detection of fouling and joint interpretation of GPR data and track geometric parameters. Ground Penetr. Radar 2018, 1, 75–103. [Google Scholar] [CrossRef]
- De Chiara, F.; Fontul, S.; Fortunato, E. GPR Laboratory Tests for Railways Materials Dielectric Properties Assessment. Remote Sens. 2014, 6, 9712–9728. [Google Scholar] [CrossRef]
- Benedetto, F.; Tosti, F.; Alani, A.M. An Entropy-Based Analysis of GPR Data for the Assessment of Railway Ballast Conditions. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3900–3908. [Google Scholar] [CrossRef]
- Forde, M.C.; De Bold, R.; O’Connor, G.; Morrissey, J. New Analysis of Ground Penetrating Radar Testing of a Mixed Railway Trackbed. In Proceedings of the Transportation Research Board 89th Annual Meeting, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Roberts, R.; Rudy, J.; Al Qadi, I.L.; Tutumluer, E.; Boyle, J. Railroad Ballast Fouling Detection Using Ground Penetrating Radar—A New Approach Based on Scattering from Voids. In Proceedings of the 9th European Conference on NDT, Berlin, Germany, 25–29 September 2006. ECNDT 2006-Th. 4.5. [Google Scholar]
- Ciampoli, L.B.; Tosti, F.; Brancadoro, M.G.; D’Amico, F.; Alani, A.M.; Benedetto, A. A spectral analysis of ground-penetrating radar data for the assessment of the railway ballast geometric properties. NDT & E Int. 2017, 90, 39–47. [Google Scholar] [CrossRef]
- Shihab, S.; Zahran, O.; Al-Nuaimy, W. Time-frequency characteristics of ground penetrating radar reflections from railway ballast and plant. In Proceedings of the 7th IEEE on High Frequency Postgraduate Student Colloquium, London, UK, 8–9 September 2002. [Google Scholar]
- Fontul, S.; Fortunato, E.; De Chiara, F.; Burrinha, R.; Balderais, M. Railways Track Characterization Using Ground Penetrating Radar. Procedia Eng. 2016, 143, 1193–1200. [Google Scholar] [CrossRef]
- Marecos, V.; Solla, M.; Fontul, S.; Antunes, V. Assessing the pavement subgrade by combining different non-destructive methods. Constr. Build. Mater. 2017, 135, 76–85. [Google Scholar] [CrossRef]
- Xiao, J.; Liu, L. Multi-frequency GPR signal fusion using forward and inverse S-transform for detecting railway subgrade defects. In Proceedings of the International Workshop on Advanced Ground Penetrating Radar, Florence, Italy, 7–10 July 2015. [Google Scholar]
- Simi, A.; Manacorda, G.; Miniati, M.; Bracciali, S.; Buonaccorsi, A. Underground asset mapping with dual-frequency dual-polarized GPR massive array. In Proceedings of the 13th International Conference on Ground Penetrating Radar, Lecce, Italy, 19–22 June 2010. [Google Scholar]
- Santos-Assunçao, S.; Pedret Rodés, J.; Pérez-Gracia, V. Ground Penetrating Radar Railways Inspection. In Proceedings of the 75th EAGE Conference & Exhibition Incorporating SPE EUROPEC 2013, London, UK, 10–13 June 2013. [Google Scholar]
- Musgrave, P. Track bed total route evaluation for track renewals and asset management: A Network Rail perspective. Constr. Build. Mater. 2015, 92, 2–8. [Google Scholar] [CrossRef]
- Kovacevic, M.S.; Gavin, K.; Stipanovic Oslakovic, I.; Bacic, M. A new methodology for assessment of railway infrastructure condition. Transp. Res. Procedia 2016, 14, 1930–1939. [Google Scholar] [CrossRef]
- Lai, W.L.; Kind, T.; Wiggenhauser, H. Frequency-dependentdispersion of high-frequency ground penetrating radar wave in concrete. NDT & E Int. 2011, 44, 267–273. [Google Scholar] [CrossRef]
- Lai, W.L.; Poon, C.S. GPR data analysis in time-frequency domain. In Proceedings of the 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 362–366. [Google Scholar] [CrossRef]
- Lai, W.L.; Kind, T.; Wiggenhauser, H. Using ground penetrating radar and time-frequency analysis to characterize construction materials. NDT & E Int. 2011, 44, 111–120. [Google Scholar] [CrossRef]
- Giovanneschi, F.; González-Huici, M.A.; Uschkerat, U. A parametric analysis of time and frequency domain GPR scattering signatures from buried landmine-like targets. In Proceedings of the SPIE 8709, Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XVIII, Baltimore, MD, USA, 7 June 2013. [Google Scholar] [CrossRef]
- Ho, K.C.; Carin, L.; Gader, P.D.; Wilson, J.N. An Investigation of Using the Spectral Characteristics from Ground Penetrating Radar for Landmine/Clutter Discrimination. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1177–1191. [Google Scholar] [CrossRef]
- Meschino, S.; Pajewski, L. SPOT-GPR: A freeware tool for target detection and localization in GPR data developed within the COST Action TU1208. J. Telecommun. Inf. Technol. 2017, 3, 43–54. [Google Scholar] [CrossRef]
- Meschino, S.; Pajewski, L. A practical guide on using SPOT-GPR, a freeware tool implementing a SAP-DoA technique. Ground Penetr. Radar 2018, 1, 104–122. [Google Scholar] [CrossRef]
- Persico, R.; Leucci, G. Interference Mitigation Achieved with a Reconfigurable Stepped Frequency GPR System. Remote Sens. 2016, 8, 926–937. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Hao, T.; Chang, Y.; Zhao, Y.H. Time-frequency analysis of enhanced GPR detection of RF tagged buried plastic pipes. NDT & E Int. 2017, 92, 88–96. [Google Scholar] [CrossRef]
- Foillard, R. EP 1 574 878 B1. Device for Determining the Presence of a Cavity under a Roadway or a Railway, by R. and the Geoscan Company. 2005. Available online: https://patents.google.com/patent/EP1574878B1/en (accessed on 31 March 2018).
- Al-Qadi, I.L.; Xie, W.; Jones, D.L.; Roberts, R. Development of a time–frequency approach to quantify railroad ballast fouling condition using ultra-wide band ground-penetrating radar data. Int. J. Pavement Eng. 2010, 10, 260–279. [Google Scholar] [CrossRef]
- IDS Georadar. SRS SafeRailSystem. The Fastest Rail Borne System for Railway Ballast Inspection. Available online: http://www.idsgeoradar.com (accessed on 31 March 2018).
- Pedret Rodés, J. Diseño de un indicador de apoyo a la gestión de Firmes basado en ground penetrating radar. Análisis de la forma del espectro de onda de GPR como indicador de estado de firmes asfálticos. Ph.D. Thesis, Universidade Politècnica de Catalunya, Barcelona, Spain, 2017. [Google Scholar]
- Paixão, A.; Fortunato, E.; Calçada, R. A contribution for integrated analysis of railway track performance at transition zones and discontinuities. Constr. Build. Mater. 2016, 111, 699–709. [Google Scholar] [CrossRef]
- Paixão, A. Transition Zones in Railway Tracks: An Experimental and Numerical Study on the Structural Behaviour. Ph.D. Thesis, University of Porto, Porto, Portugal, 2014. [Google Scholar]
- EN 13848-5:2008 Track Geometry Quality—Geometric Quality Levels. 2008. European Standard. Available online: https://www.en-standard.eu/csn-en-13848-5-railway-applications-track-track-geometry-quality-part-5-geometric-quality-levels-plain-line-switches-and-crossings/ (accessed on 1 November 2017).
- REFER. Tolerâncias dos parâmetros geométricos da via. IT.VIA.018. 2009. Internal Technical Standard. Available online: https://aplicacoes.refer.pt/normas/enormativosWEB/Pesquisa.aspx (accessed on 1 November 2017). (In Portuguese).

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fontul, S.; Paixão, A.; Solla, M.; Pajewski, L. Railway Track Condition Assessment at Network Level by Frequency Domain Analysis of GPR Data. Remote Sens. 2018, 10, 559. https://doi.org/10.3390/rs10040559
Fontul S, Paixão A, Solla M, Pajewski L. Railway Track Condition Assessment at Network Level by Frequency Domain Analysis of GPR Data. Remote Sensing. 2018; 10(4):559. https://doi.org/10.3390/rs10040559
Chicago/Turabian StyleFontul, Simona, André Paixão, Mercedes Solla, and Lara Pajewski. 2018. "Railway Track Condition Assessment at Network Level by Frequency Domain Analysis of GPR Data" Remote Sensing 10, no. 4: 559. https://doi.org/10.3390/rs10040559
APA StyleFontul, S., Paixão, A., Solla, M., & Pajewski, L. (2018). Railway Track Condition Assessment at Network Level by Frequency Domain Analysis of GPR Data. Remote Sensing, 10(4), 559. https://doi.org/10.3390/rs10040559