Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing


 , ,
, ,
Abstract
1. Introduction
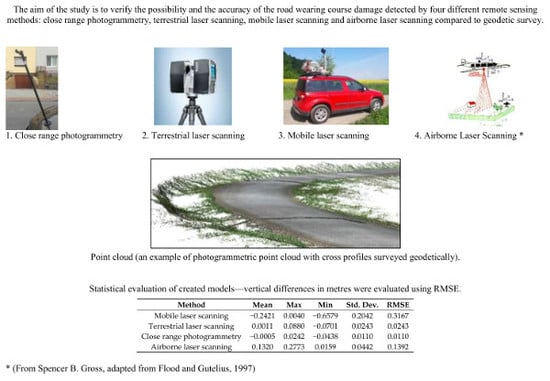
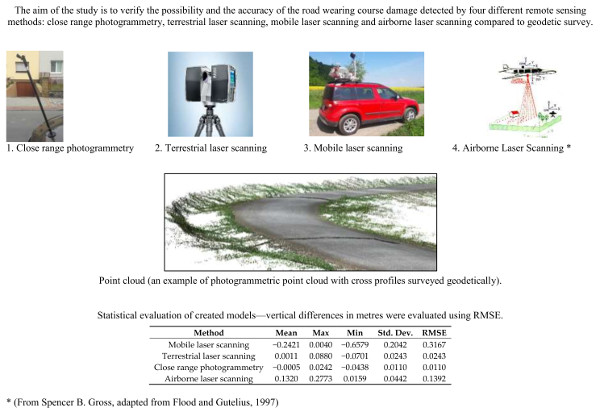
2. Materials and Methods
2.1. Geodetic Survey
2.2. Methods
2.2.1. Close Range Photogrammetry
2.2.2. Terrestrial Laser Scanning
2.2.3. Mobile Laser Scanning
- Import data into software OPALS and thin each point cloud by choosing the smallest Z-value in every 0.15 m2 cell. Then, six data sets were joined into one for further processing.
- Morphologic filtering (second smallest Z-value in 1 × 1 m cell) and preliminary DTM interpolation (robust moving planes (RMP) and Delaunay triangulation (DT) with a grid size 1m2 both). The DT_dtm was used to fill gaps in RMP_dtm. Then, attribute “normalized Z” was created and added to the point cloud by subtracting the preliminary DTM from the Z-values.
- The third step is the same as the second but with other parameters. Thinning and interpolation were applied for each 0.25 m2 cell. Also, during morphological filtering, we used an asymmetric height threshold from −0.5 to 0.2 m to ensure that all points below the fitted plane will be considered. After interpolating grids, the attribute “normalized Z” was renewed.
- Robust filtering and DTM interpolation. The main parameters of robust filtering are the following: search radius 1 m; plane interpolation; normalized Z below 0.2 m. After we obtained terrain points, we used robust moving plane interpolation to create a DTM with a grid size of 0.05 m for our comparison.
2.2.4. Airborne Laser Scanning
2.3. Accuracy Assessment and Density of Point Clouds According to Different Methods
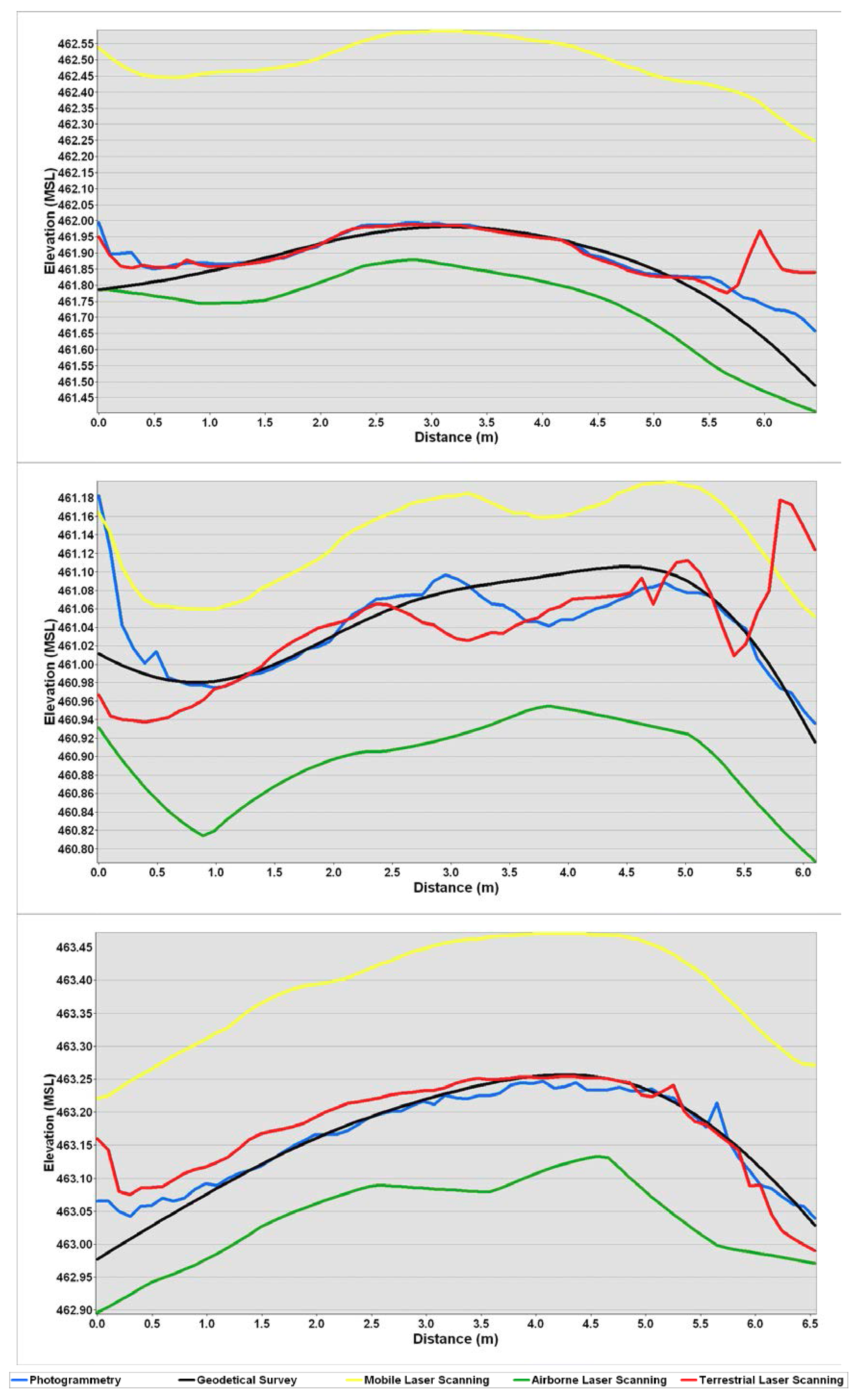
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bogus, S.M.; Song, J.; Waggerman, R.; Lenke, L.R. Rank correlation method for evaluating manual pavement distress data variability. J. Infrastruct. Syst. 2010, 16, 66–72. [Google Scholar] [CrossRef]
- Abdie, E.; Sisakht, S.R.; Goushbor, L.; Soufi, H. Accuracy assessment of GPS and surveying technique in forest road mapping. Ann. For. Res. 2012, 55, 309–317. [Google Scholar]
- Rodriguez-Perez, J.R.; Alvarez, M.F.; Sanz-Ablanedo, E. Assessment of low-cost receiver accuracy and precision in forest environments. J. Surv. Eng. 2007, 133, 159–167. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection bogusof Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Li, Q.; Yao, M.; Yao, X.; Xu, B. A real-time 3D scanning system for pavement distortion inspection. Meas. Sci. Technol. 2009, 21. [Google Scholar] [CrossRef]
- Wang, K.C.P.; Gong, W.; Tracy, T.; Nguyen, V. Automated Survey of Pavement Distress Based on 2D and 3D Laser Images; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2011. [Google Scholar]
- Tsai, Y.J.; Li, F.; Wu, Y. A new rutting measurement method using emerging 3D line-laser-imaging system. Int. J. Pavement Res. Technol. 2013, 6, 667–672. [Google Scholar] [CrossRef]
- Azizi, Z.; Najafi, A.; Sadeghian, S. Forest Road Detection Using LiDAR Data. J. For. 2014, 25, 975–980. [Google Scholar] [CrossRef]
- Rowlands, A.; Sarris, A. Detection of exposed and subsurface archaeological remains using multi-sensor remote sensing. J. Archaeol. Sci. 2007, 34, 795–803. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Yu, X.; Kaartinen, H.; Kukko, A.; Holopainen, M. Forest Inventory Using Small-Footprint Airborne LiDAR. In Topographic Laser Ranging and Scanning, Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar] [CrossRef]
- Brenner, C. Building Reconstruction from Images and Laser Scanning. Int. J. Appl. Earth Obs. Geoinf. 2005, 6, 187–198. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental Comparison of Filter Algorithms for Bare-Earth Extraction from Airborne Laser Scanning Point Clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Litkey, P.; Yu, X.; Haggrén, H.; Rönnholm, P.; Pyysalo, U.; Pitkänen, J.; Maltamo, M. Algorithms and Methods of Airborne Laser Scanning for Forest Measurements; International Society for Photogrammetry and Remote Sensing (ISPRS): Freiburg, Germany, 2004; Volume XXXVI–8/W2, pp. 82–89. [Google Scholar]
- White, R.; Dietterick, B.C.; Mastin, T.; Strihman, R. Forest road mapped using LiDAR in steep forested terrain. Remote Sens. 2010, 2, 1120–1141. [Google Scholar] [CrossRef]
- Saito, M.; Goshima, M.; Aruga, K.; Matsue, K.; Shuin, Y.; Tasaka, T. Study of Automatic Forest Road Design Model Considering Shallow landslides with LiDAR Data of Funyu Experimental Forest. Croat. J. For. Eng. 2013, 34, 1–15. [Google Scholar]
- Aruga, K.; Sessions, J.; Miyata, E.S. Forest road design with soil sediment using a high-resolution DEM. J. For. Res. 2005, 10, 471–479. [Google Scholar] [CrossRef]
- Contreras, M.; Aracena, P.; Chung, W. Improving Accuracy in Earthwork Volume Estimation for Proposed Forest Roads Using a High-Resolution Digital Elevation Model. Croat. J. For. Eng. 2012, 33, 125–142. [Google Scholar]
- Aricak, B. Using remote sensing data to predict road fill areas affected by fill erosion with planned forest road construction. A case study in Kastamonu Regional Forest Directorate (Turkey). Environ. Monit. Assess. 2015, 187, 4663. [Google Scholar] [CrossRef] [PubMed]
- Dehvari, A.; Heck, J.H. Effect of LiDAR derived DEM resolution on terrain attributes, stream characterization and watershed delineation. Int. J. Agric. Crop Sci. 2013, 6, 946–967. [Google Scholar]
- Gallay, M.; Kaňuk, J.; Hochmuth, Z.; Meneely, J.D.; Hofierka, J.; Sedlák, V. Large-scale and high-resolution 3-D cave mapping by terrestrial laser scanning: A case study of the domica cave, Slovakia. Int. J. Speleol. 2015, 44, 277–291. [Google Scholar] [CrossRef]
- Wang, G.; Joyce, J.; Phillips, D.; Shrestha, R.; Carter, W. Delineating and defining the boundaries of an active landslide in the rainforest of Puerto Rico using a combination of airborne and terrestrial LIDAR data. Landslides 2013, 10, 503–513. [Google Scholar] [CrossRef]
- Barbarella, M.; Fiani, M. Monitoring of large landslides by terrestrial laser scanning techniques: Field data collection and processing. Eur. J. Remote Sens. 2013, 46, 126–151. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Marselis, S.M.; Yebra, M.; Jovanovic, T.; van Dijk, A.I.J.M. Deriving comprehensive forest structure information from mobile laser scanning observations using automated point cloud classification. Environ. Model. Softw. 2016, 82, 142–151. [Google Scholar] [CrossRef]
- Moskal, L.M.; Zheng, G. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest. Remote Sens. 2011, 4, 1–20. [Google Scholar] [CrossRef]
- Tang, P.; Huber, D.; Akinci, B.; Lipman, R.; Lytle, A. Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Autom. Constr. 2010, 19, 829–843. [Google Scholar] [CrossRef]
- Shukor, S.A.A.; Wong, R.; Rushforth, E.; Basah, S.N.; Zakaria, A. 3D terrestrial laser scanner for managing existing building. J. Teknol. 2015, 76, 133–139. [Google Scholar] [CrossRef]
- Fais, S.; Cuccuru, F.; Ligas, P.; Casula, G.; Bianchi, M.G. Integrated ultrasonic, laser scanning and petrographical characterisation of carbonate building materials on an architectural structure of a historic building. Bull. Eng. Geol. Environ. 2017, 76, 71–84. [Google Scholar] [CrossRef]
- Hullo, J.F.; Thibault, G.; Boucheny, C. Advances in multi-sensor scanning and visualization of complex plants: The utmost case of a reactor building. ISPRS Arch. 2015, XL-5W4, 163–169. [Google Scholar] [CrossRef]
- Day, S.S.; Gran, K.B.; Belmont, P.; Wawrzyniec, T. Measuring bluff erosion part 1: Terrestrial laser scanning methods for change detection. Earth Surf. Process. Landf. 2013, 38, 1055–1067. [Google Scholar] [CrossRef]
- Ergincan, F.; Cabuk, A.; Avdan, U.; Tun, M. Advanced technologies for archaeological documentation: Patara case. Sci. Res. Essays 2010, 5, 2615–2629. [Google Scholar]
- Torres, J.A.; Hernandez-Lopez, D.; Gonzalez-Aguilera, D.; Moreno Hidalgo, M.A. A hybrid measurement approach for archaeological site modelling and monitoring: The case study of Mas D’Is, Penàguila. J. Archaeol. Sci. 2014, 50, 475–483. [Google Scholar] [CrossRef]
- Yastikli, N. Documentation of cultural heritage using digital photogrammetry and laser scanning. J. Cult. Heritage 2007, 8, 423–427. [Google Scholar] [CrossRef]
- Castagnetti, C.; Bertacchini, E.; Capra, A.; Dubbini, M. Terrestrial laser scanning for preserving cultural heritage: Analysis of geometric anomalies for ancient structures. In Proceedings of the FIG Working Week, Rome, Italy, 6–10 May 2012. [Google Scholar]
- Choi, M.; Kim, M.; Kim, G.; Kim, S.; Park, S.; Lee, S. 3D scanning technique for obtaining road surface and its applications. Int. J. Precis. Eng. Manuf. 2016, 18, 367–373. [Google Scholar] [CrossRef]
- Bitelli, G.; Simone, A.; Girardi, F.; Lantieri, C. Laser scanning on road pavements: A new approach for characterizing surface texture. Sensors 2012, 12, 9110–9128. [Google Scholar] [CrossRef] [PubMed]
- Přikryl, M.; Kutil, L. Consequences of a complex using of 3D approach in the implementation of the road reconstruction—Usage of TLS stop&go and usage of paving control system for milling machines. In Proceedings of the 6th International Conference on Engineering Surveying (INGEO 2014), Prague, Czech Republic, 3–4 April 2014. [Google Scholar]
- Barbarella, M.; De Blasiis, M.R.; Fiani, M.; Santoni, M. A LiDAR application for the study of taxiway surface evenness and slope. In ISPRS Annals Photogrammetry, Remote Sensing and Spatial Information Sciences, Proceedings of the ISPRS Technical Commision V Symposium, Riva del Garda, Italy, 23–25 June 2014; ISPRS: Göttingen, Germanny, 2014; Volume II-5. [Google Scholar] [CrossRef]
- Chin, A.; Olsen, M.J. Evaluation of technologies for road profile capture, analysis, and evaluation. J. Surv. Eng. 2015, 141. [Google Scholar] [CrossRef]
- Akgul, M.; Yurtseven, H.; Akburak, S.; Demir, M.; Cigizoglu, H.K.; Öztürk, T.; Eksi, M.; Akay, A.O. Short term monitoring of forest road pavement degradation using terrestrial laser scanning. Measurement 2017, 103, 283–293. [Google Scholar] [CrossRef]
- Wang, H. Development of Laser System to Measure Pavement Rutting. Master’s Thesis, University of South Florida, Tampa, FL, USA, 2005. Available online: http://digital.lib.usf.edu/SFS0025691/00001 (accessed on 7 November 2017).
- Demir, M.; Hasdemir, M. Functional planning criterion of forest road network systém according to recent forestry development and suggestion in Turkey. Am. J. Environ. Sci. 2005, 1, 22–28. [Google Scholar] [CrossRef][Green Version]
- Mrics, S.W.; Clegg, P.; Jones, R. Combining terrestrial laser scanning, RTK GPS and 3D visualisation: Application of optical 3D measurement in geological exploration. In Proceedings of the 7th Conference on Optical 3D Measurement Techniques, Vienna, Austria, 3–5 October 2005. [Google Scholar]
- Jaakkola, A.; Hyyppä, J.; Hyyppä, H.; Kukko, A. Retrieval algorithms for road surface modelling using laser-based mobile mapping. Sensors 2008, 8, 5238–5249. [Google Scholar] [CrossRef] [PubMed]
- Bitenc, M.; Lindenbergh, R.; Khoshelham, K.; Van Waarden, A.P. Evaluation of a LiDAR land-based mobile mapping system for monitoring sandy coasts. Remote Sens. 2011, 3, 1472–1491. [Google Scholar] [CrossRef]
- Wang, J.; Gonzalez-Jorge, H.; Lindenbergh, R.; Arias-Sanchez, P.; Menenti, M. Geometric road runoff estimation from laser mobile mapping data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 385–391. [Google Scholar] [CrossRef]
- Guan, H.; Li, J.; Cao, S.; Yu, Y. Use of mobile LiDAR in road information inventory: A review. Int. J. Image Data Fusion 2016, 7, 219–242. [Google Scholar] [CrossRef]
- Kumar, P.; Angelats, E. An automated road roughness detection from mobile laser scanning data. ISPRS Arch. 2017, 42, 91–96. [Google Scholar] [CrossRef]
- Böder, V.; Kersten, T.P.; Thies, T.; Sauer, A. Mobile laser scanning on board hydrographic survey vessels—Applications and accuracy investigations. In Proceedings of the FIG Working Week 2011, Marrakech, Morocco, 18–22 May 2011. Bridging the Gap between Cultures. [Google Scholar]
- Mitchell, T.; Suarez, G.; Chazaly, B. Evaluation of coastal vulnerability with mobile laser scanning from a vessel. In Proceedings of the IEEE Oceanic Engineering Society (OCEANS 2013), San Diego, CA, USA; 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Szulwic, J.; Burdziakowski, P.; Janowski, A.; Kholodkov, A.; Matysik, K.; Matysik, M.; Przyborski, M.; Tysiąc, P.; Wojtowicz, A. Maritime Laser Scanning as the Source for Spatial Data. Pol. Marit. Res. 2015, 22, 9–14. [Google Scholar] [CrossRef]
- Yan, L.; Li, Z.; Liu, H.; Tan, J.; Zhao, S.; Chen, C. Detection and classification of pole-like road objects from mobile LiDAR data in motorway environment. Opt. Laser Technol. 2017, 97, 272–283. [Google Scholar] [CrossRef]
- Szulwic, J.; Tysiąc, P. Searching for road deformations using mobile laser scanning. MATEC Web Conf. 2017, 122. [Google Scholar] [CrossRef]
- Vallet, B.; Papelard, J.P. Road orthophoto/DTM generation from mobile laser csanning. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W5, 377–384. [Google Scholar] [CrossRef]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform approach to mobile laser scanning. ISPRS Arch 2012, XXXIX-B2, 483–488. [Google Scholar] [CrossRef]
- Pu, S.; Rutzinger, M.; Vosselman, G.; Elberink, S.O. Recognizing basic structures from mobile laser scanning data for road inventory studies. ISPRS J. Photogramm. Remote Sens. 2011, 66, 28–39. [Google Scholar] [CrossRef]
- Nurunnabi, A.; West, G.; Belton, D. Robust locally weighted regression for ground surface extraction in mobile laser scanning 3D data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 1, 217–222. [Google Scholar] [CrossRef]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Briese, C.; Pfeifer, N.; Dorninger, P. Applications of the robust interpolation for DTM determination. ISPRS Arch. 2002, 34, 55–61. [Google Scholar]
- Tyagur, N.; Hollaus, M. Digital terrain models from mobile laser scanning data in Moravian karst. ISPRS Arch. 2016, XLI-B3, 387–394. [Google Scholar] [CrossRef]
- Mandlburger, G.; Otepka, J.; Karel, W.; Wagner, W.; Pfeifer, N. Orientation and processing of airborne laser scanning data (OPALS)—Concept and first results of a comprehensive ALS software. ISPRS Arch. 2009, XXXVIII, 55–60. [Google Scholar]
- Otepka, J.; Mandlburger, G.; Karel, W. The OPALS Data Manager—Efficient Data Management for Processing Large Airborne Laser Scanning Projects. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1–3, 153–159. [Google Scholar] [CrossRef]
- Pfeifer, N.; Mandlburger, G.; Otepka, J.; Karel, W. OPALS–A framework for Airborne Laser Scanning data analysis. Comput. Environ. Urban Syst. 2014, 45, 125–136. [Google Scholar] [CrossRef]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. Lond. Ser. B 1979, 203, 405–426. [Google Scholar] [CrossRef]
- Hrůza, P.; Mikita, T.; Janata, P. Monitoring of forest hauling roads wearing course damage using unmanned aerial systems. Acta Univ. Agric. Silvic. Mendelianae Brun. 2016, 64, 1537–1546. [Google Scholar] [CrossRef]
- Hrůza, P.; Mikita, T.; Janata, P.; Cibulka, M.; Patočka, Z. Accuracy of terrestrial imaging for the detection of forest road wearing course damage. Zpr. Lesnického Výzkumu 2017, 62, 75–81. [Google Scholar]
- Valença, J.; Puente, I.; Júlio, E.; González-Jorge, H.; Arias-Sánchez, P. Assessment of crack on concrete bridges using image processing supported by laser scanning survey. Constr. Build. Mater. 2017, 146, 668–678. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Lim, S.; Thatcher, C.A.; Brock, J.C.; Kimbrow, D.R.; Danielson, J.J.; Reynolds, B.J. Accuracy assessment of a mobile terrestrial lidar survey at Padre Island National Seashore. Int. J. Remote Sens. 2013, 34, 6355–6366. [Google Scholar] [CrossRef]
- Zhou, L.; Vosselman, G. Mapping curbstones in airbone and mobile laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 293–304. [Google Scholar] [CrossRef]
- Guan, H.; Li, J.; Yu, Y. 3D urban mapping using a Trimble MX8 mobile laser scanning system: A validation study. In Proceedings of the 8th International Symposium on Mobile Mapping Technology (MMT 2013), Tainan, Taiwan, 1–3 May 2013. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Point Cloud Density (pts/m2) |
|---|---|
| MLS | 26 |
| TLS | 17,882 |
| Photogrammetry | 18,276 |
| ALS | 1.13 |
| Method | Mean | Max | Min | Std. Dev. | RMSE |
|---|---|---|---|---|---|
| Mobile laser scanning | −0.2517 | 0.0049 | −0.8459 | 0.2014 | 0.4228 |
| Terrestrial laser scanning | −0.0396 | 0.1160 | −0.8930 | 0.1254 | 0.1315 |
| Photogrammetry | −0.0259 | 0.0400 | −0.4389 | 0.0605 | 0.0658 |
| Airborne laser scanning | 0.1130 | 0.3539 | −0.1469 | 0.0662 | 0.1309 |
| Method | Mean | Max | Min | Std. Dev. | RMSE |
|---|---|---|---|---|---|
| Mobile laser scanning | −0.2421 | 0.0040 | −0.6579 | 0.2042 | 0.3167 |
| Terrestrial laser scanning | 0.0011 | 0.0880 | −0.0701 | 0.0243 | 0.0243 |
| Photogrammetry | −0.0005 | 0.0242 | −0.0438 | 0.0110 | 0.0110 |
| Airborne laser scanning | 0.1320 | 0.2773 | 0.0159 | 0.0442 | 0.1392 |
| Method | Mean | Max | Min | Std. Dev. | RMSE |
|---|---|---|---|---|---|
| Mobile laser scanning | −0.0501 | 0.0049 | −0.1159 | 0.0273 | 0.0570 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hrůza, P.; Mikita, T.; Tyagur, N.; Krejza, Z.; Cibulka, M.; Procházková, A.; Patočka, Z. Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing. Remote Sens. 2018, 10, 492. https://doi.org/10.3390/rs10040492
Hrůza P, Mikita T, Tyagur N, Krejza Z, Cibulka M, Procházková A, Patočka Z. Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing. Remote Sensing. 2018; 10(4):492. https://doi.org/10.3390/rs10040492
Chicago/Turabian StyleHrůza, Petr, Tomáš Mikita, Nataliya Tyagur, Zdenek Krejza, Miloš Cibulka, Andrea Procházková, and Zdeněk Patočka. 2018. "Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing" Remote Sensing 10, no. 4: 492. https://doi.org/10.3390/rs10040492
APA StyleHrůza, P., Mikita, T., Tyagur, N., Krejza, Z., Cibulka, M., Procházková, A., & Patočka, Z. (2018). Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing. Remote Sensing, 10(4), 492. https://doi.org/10.3390/rs10040492