Ground Moving Target Imaging and Analysis for Near-Space Hypersonic Vehicle-Borne Synthetic Aperture Radar System with Squint Angle


Abstract
1. Introduction
2. Modelling and Characterisation
2.1. Signal Model
2.2. Characteristic Description
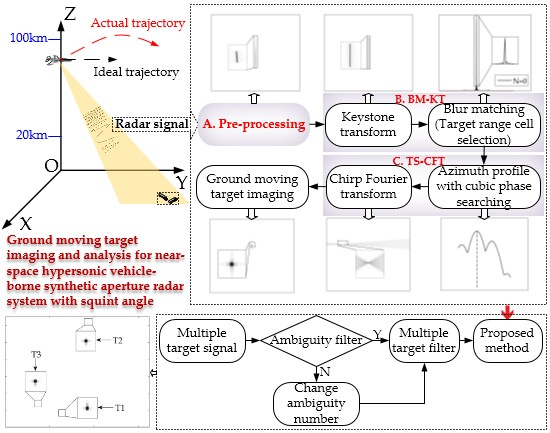
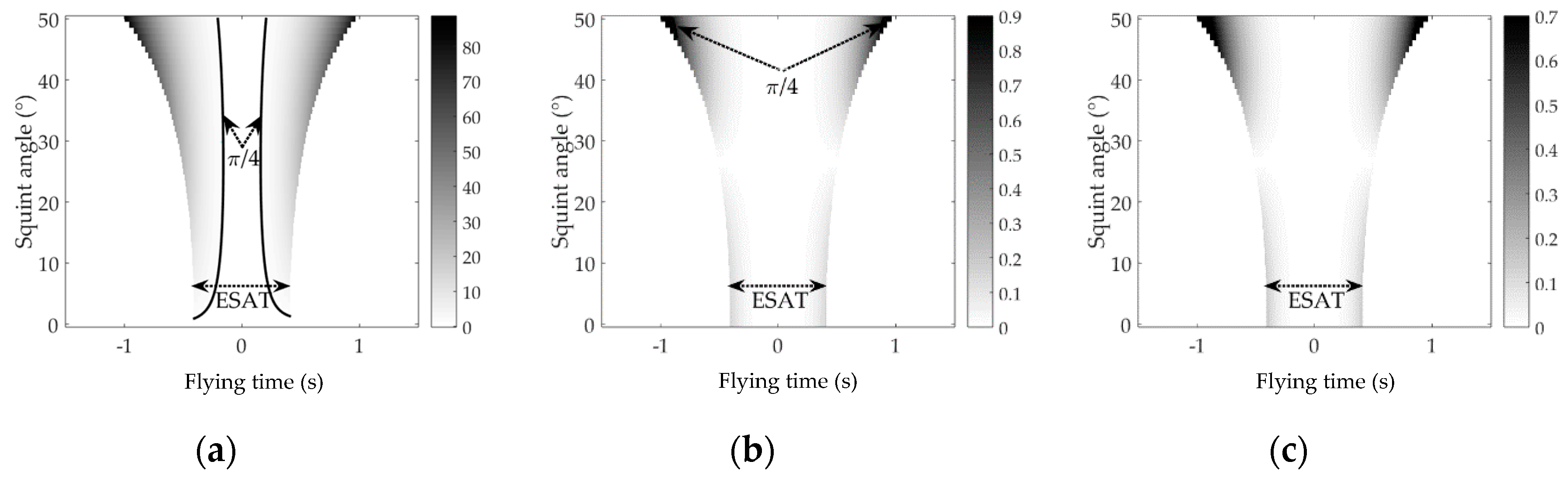
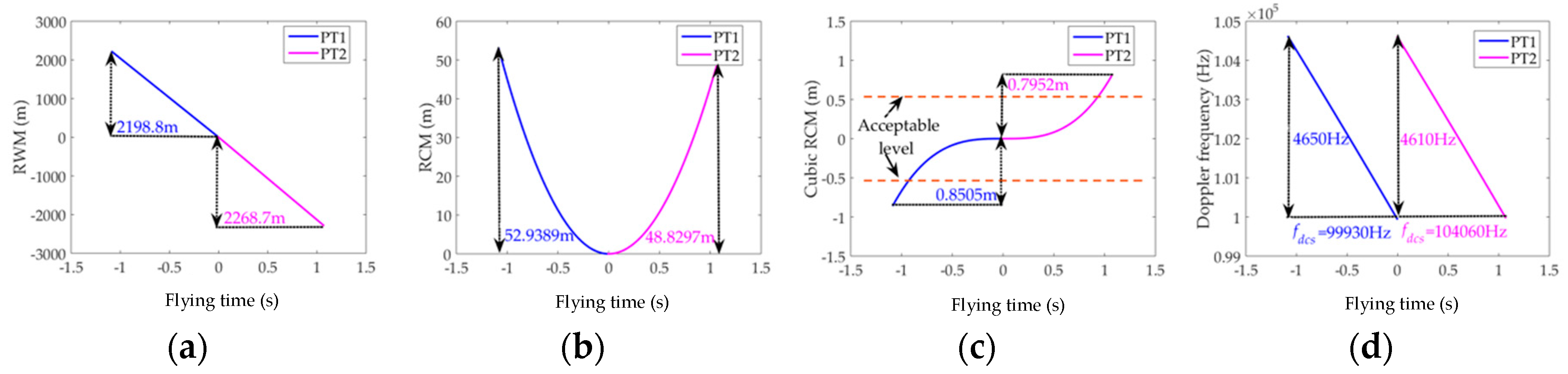
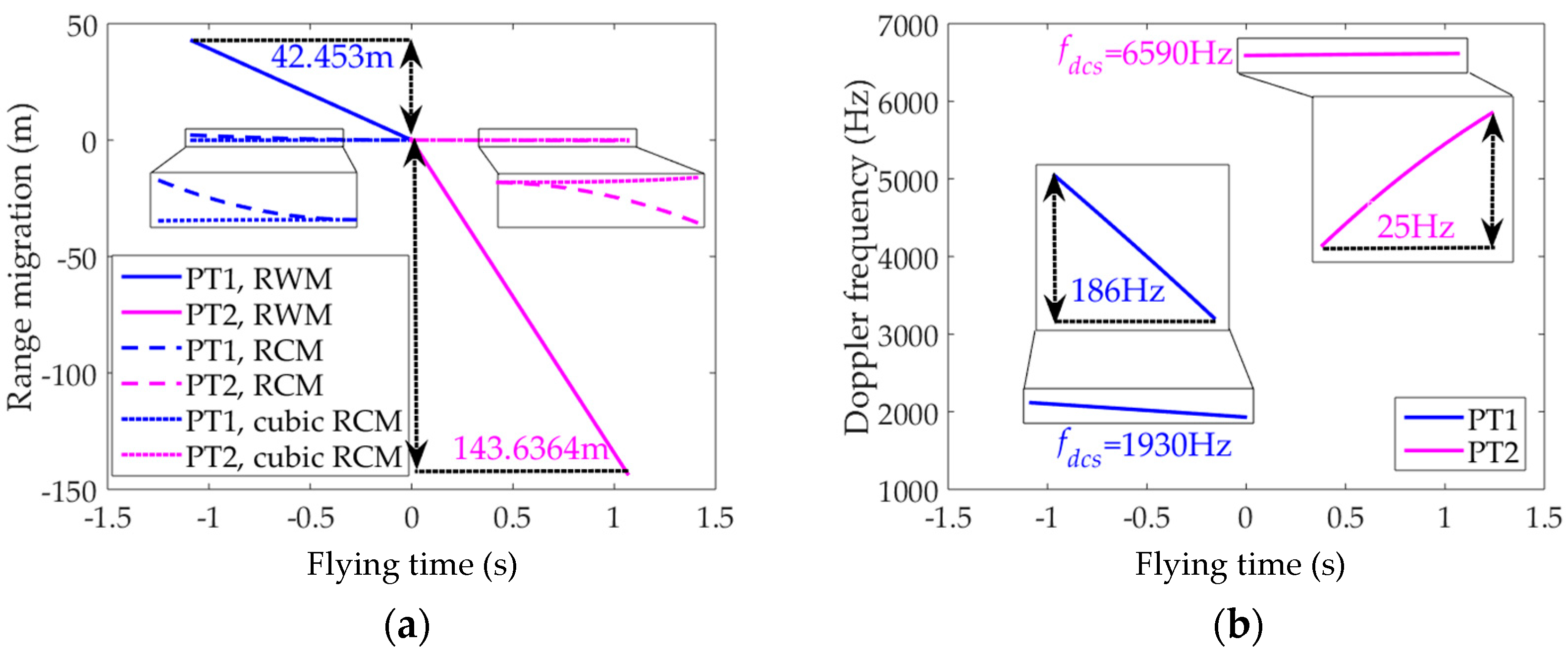
2.2.1. Range Migration
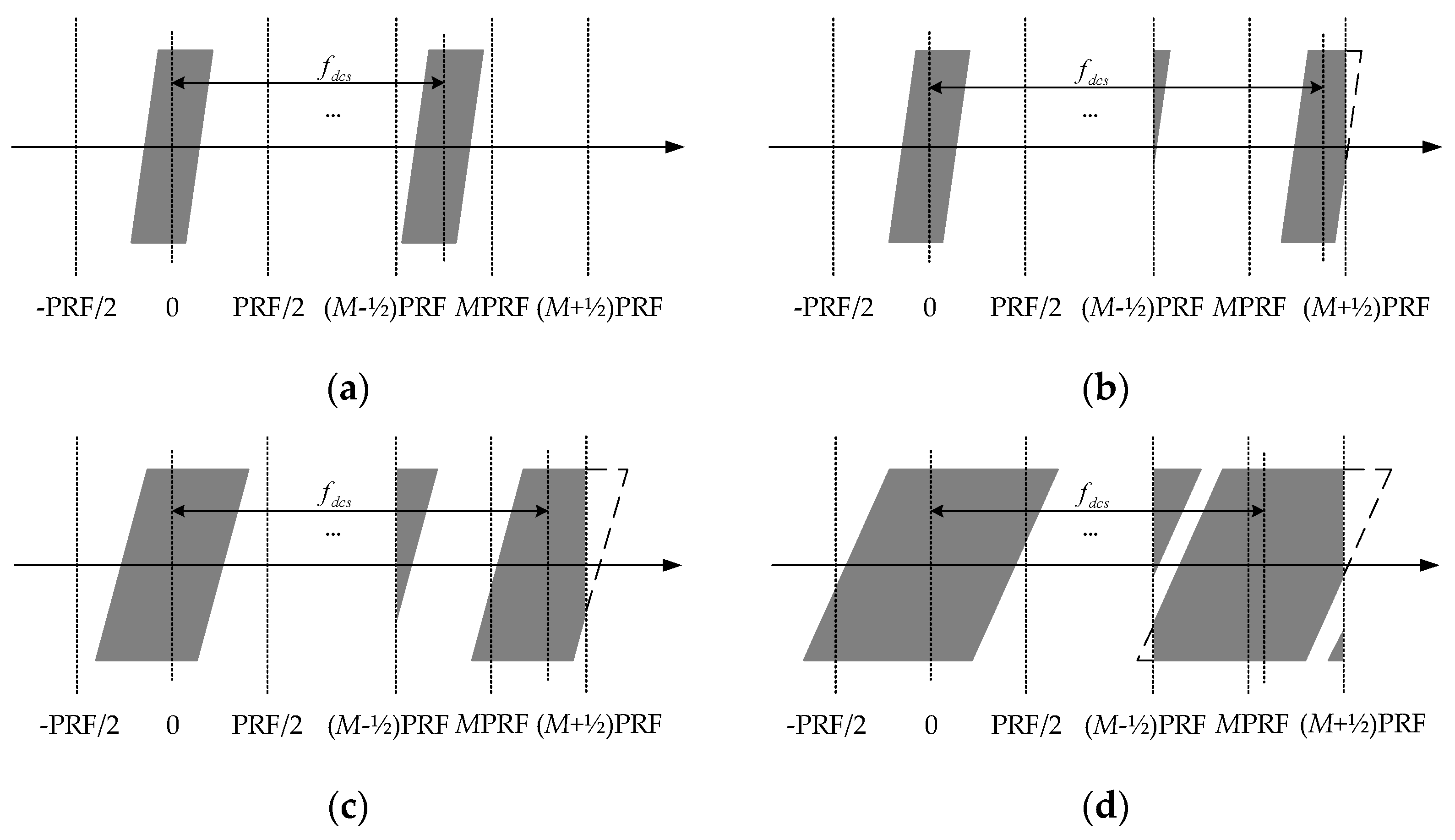
2.2.2. Azimuth Spectrum Distribution
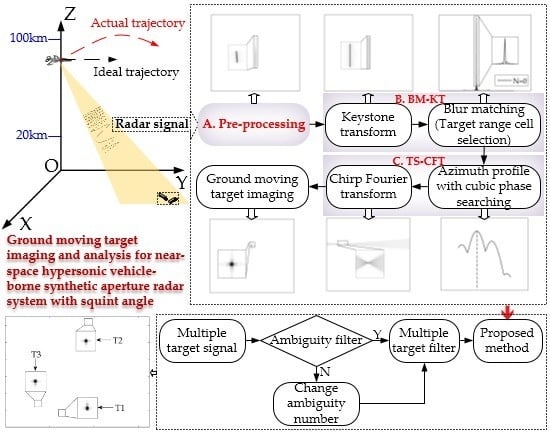
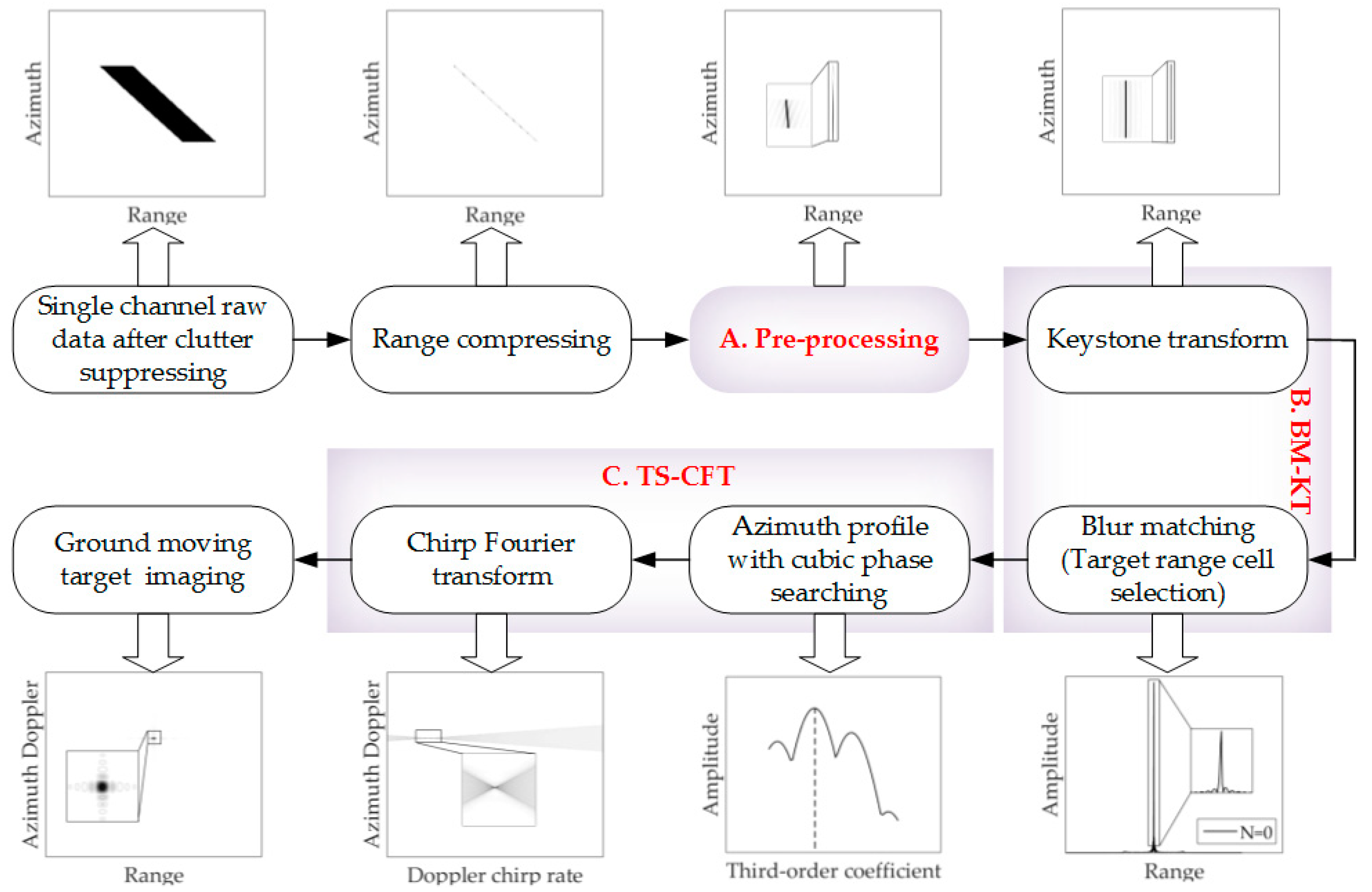
3. Proposed Algorithm Description
3.1. Pre-Processing
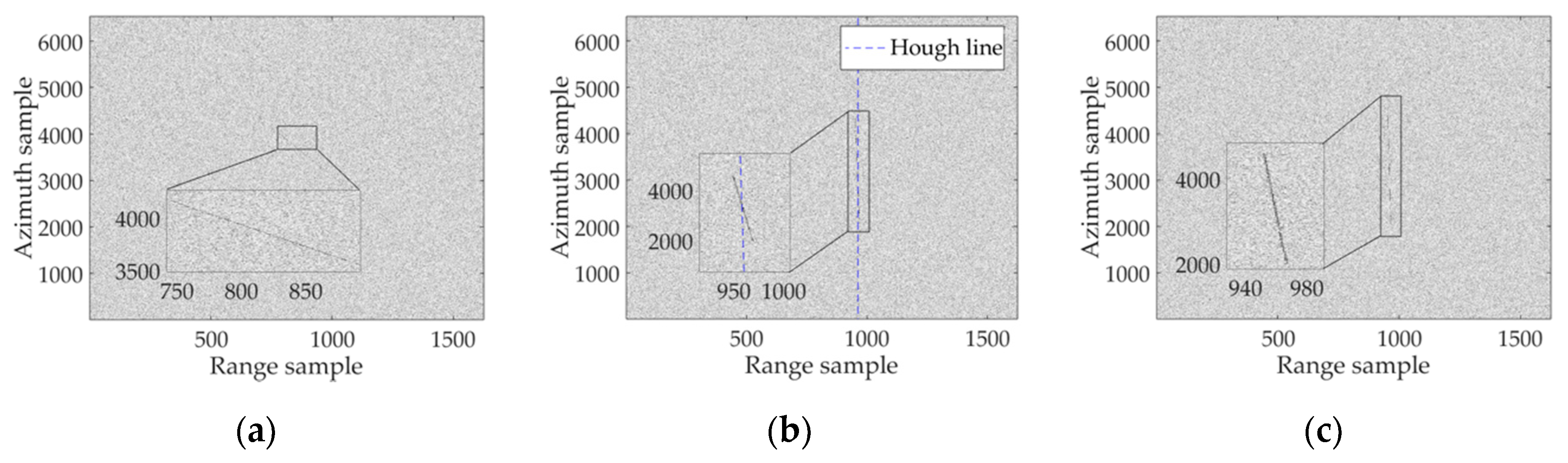
3.2. Residual RWM Correcting: BM-KT
3.3. Azimuth Focusing: TS-CFT
3.3.1. Scope
3.3.2. Step-Size
4. Implementation Considerations
4.1. Curvilinear Trajectory
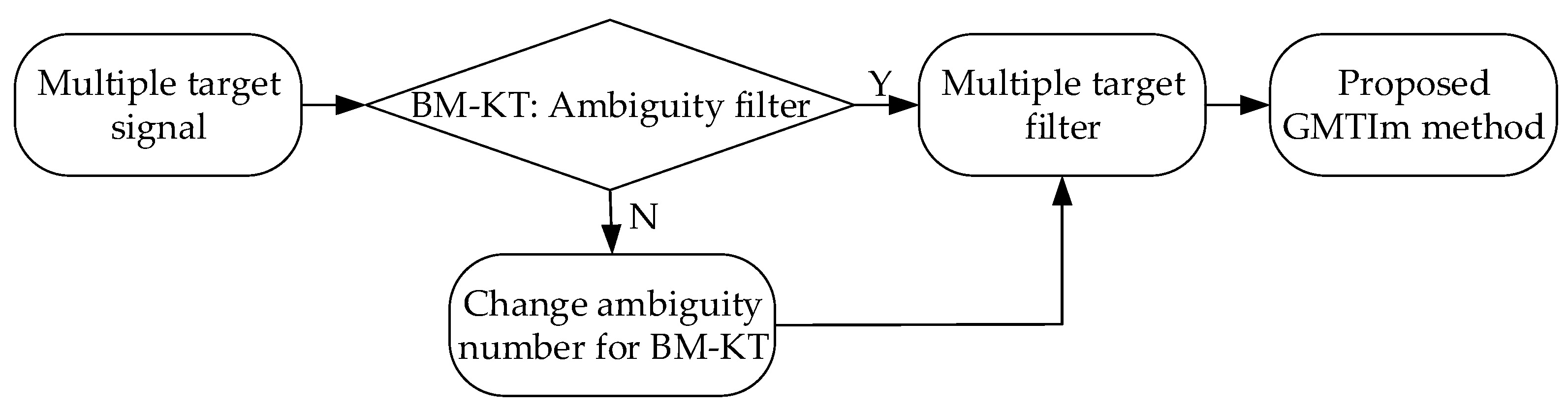
4.2. Multiple GMTIm
5. Experiment Results
5.1. Performance Comparison with Existing Methods
5.1.1. Focusing Performance
5.1.2. Computational Complexity
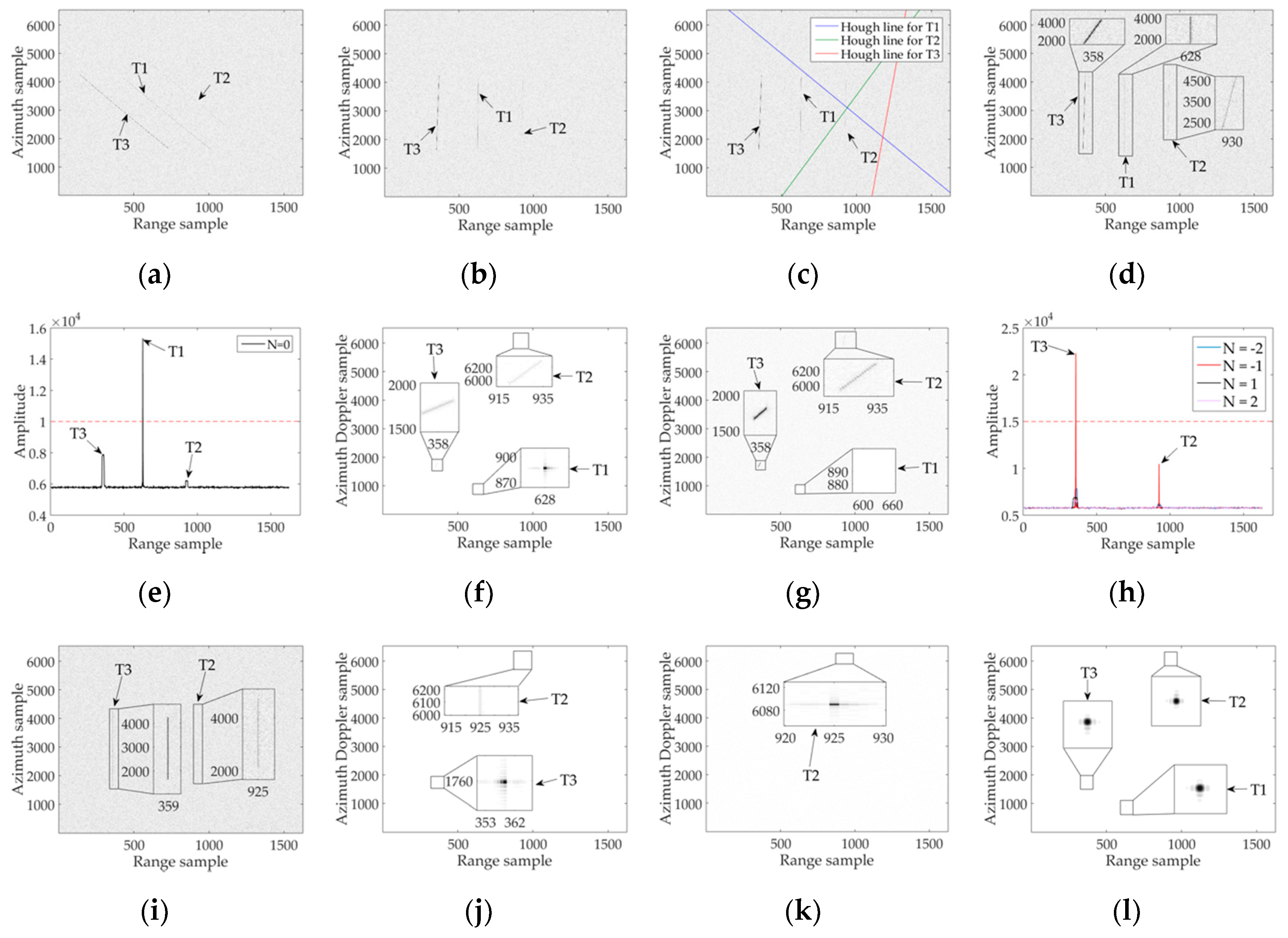
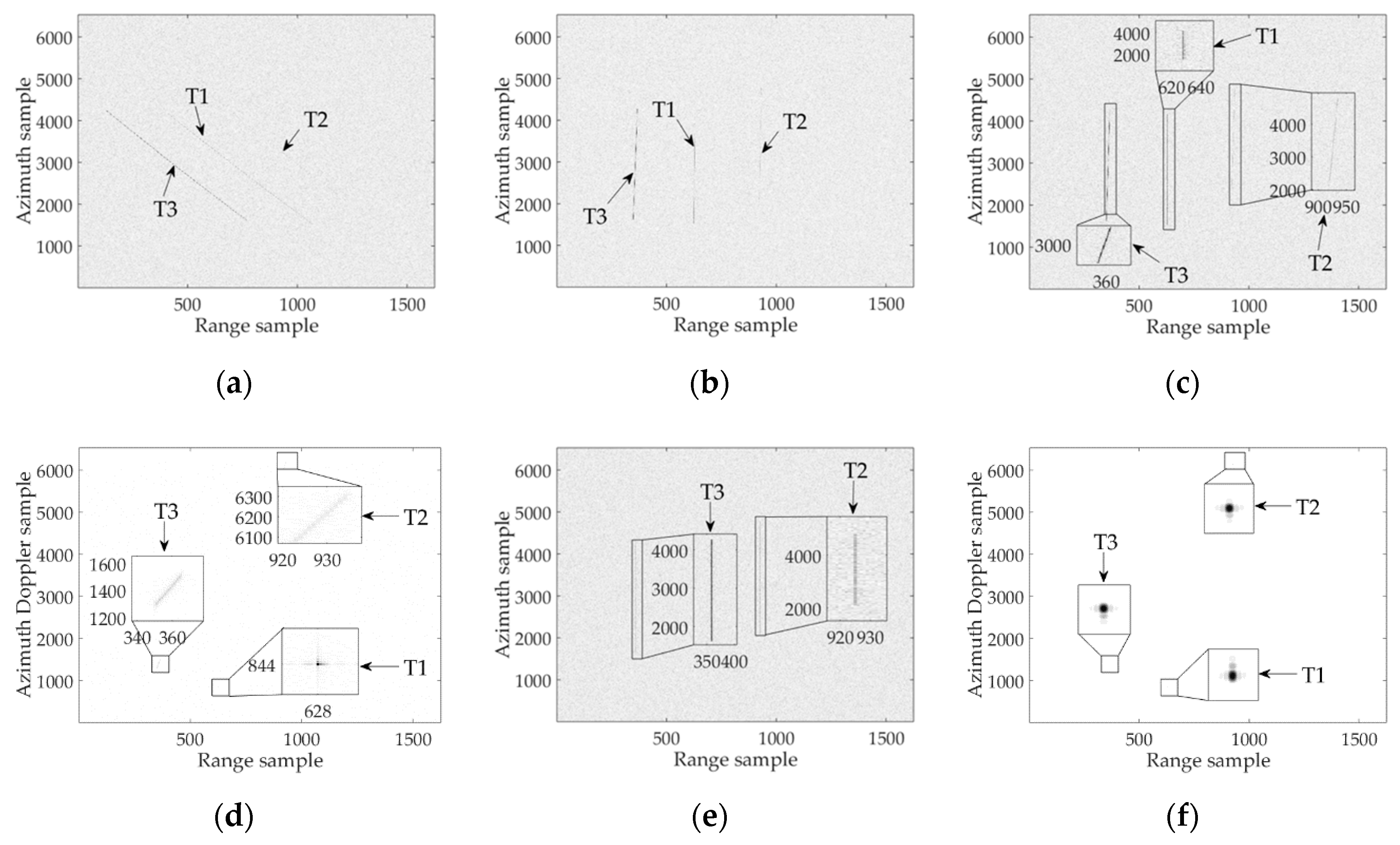
5.2. Multiple Target Imaging under a Linear Trajectory Case
5.3. Multiple Target Imaging under a Curvilinear Trajectory Case
6. Discussion
6.1. Clutter Effect
6.2. Wavelength Effect
6.3. Resolution Effect
6.4. Removal of Doppler Spectrum Ambiguity
6.5. Efficiency Improvement
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value (Linear) | Value (Curvilinear) | Physical Explanation | |
|---|---|---|---|
| Initial slant range | |||
| Relative radial velocity | |||
| Relative radial acceleration | |||
| Relative radial jerk | |||
| Relative fourth-order radial acceleration |
Appendix B

Appendix C
References
- Wang, W.Q. Near-space vehicles: Supply a gap between satellites and airplanes. IEEE Aerosp. Electron. Syst. Mag. 2011, 25, 4–9. [Google Scholar] [CrossRef]
- Wang, W.Q. Near-Space Remote Sensing: Potential and Challenges; Springer: New York, NY, USA, 2011. [Google Scholar]
- Wang, Y.; Cao, Y.; Peng, Z.; Su, H. Clutter suppression and moving target imaging approach for multichannel hypersonic vehicle borne radar. Digit. Signal Process. 2017, 68, 81–92. [Google Scholar] [CrossRef]
- Wang, Y.; Cao, Y.; Peng, Z.; Su, H. Clutter suppression and GMTI for hypersonic vehicle borne SAR system with MIMO antenna. IET Signal Process. 2017, 11, 909–915. [Google Scholar] [CrossRef]
- Jao, J.K. Theory of synthetic aperture radar imaging of a moving target. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1984–1992. [Google Scholar]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.G.; Ma, J.; Zheng, J. Ground maneuvering target imaging and high-order motion parameter estimation based on second-order keystone and generalized Hough-HAF transform. IEEE Trans. Geosci. Remote Sens. 2017, 55, 320–335. [Google Scholar] [CrossRef]
- Perry, R.P.; Dipietro, R.C.; Fante, R.L. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Kirkland, D. Imaging moving targets using the second-order keystone transform. IET Radar Sonar Navig. 2011, 5, 902–910. [Google Scholar] [CrossRef]
- Zhu, S.; Liao, G.; Qu, Y.; Zhou, Z.; Liu, X. Ground moving targets imaging algorithm for synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 462–477. [Google Scholar] [CrossRef]
- Zhu, S.; Liao, G.; Yang, D.; Tao, H. A new method for radar high-speed maneuvering weak target 726 detection and imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1175–1179. [Google Scholar]
- Xu, J.; Yu, J.; Peng, Y.; Xia, X.G. Radon–Fourier transform for radar target detection, I: Generalized Doppler filter bank. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1186–1202. [Google Scholar] [CrossRef]
- Xu, J.; Xia, X.G.; Peng, S.; Yu, J.; Peng, Y.; Qian, L. Radar maneuvering target motion estimation based on generalized Radon–Fourier transform. IEEE Trans. Signal Process. 2012, 60, 6190–6201. [Google Scholar]
- Zeng, H.; Chen, J.; Wang, P.; Yang, W.; Liu, W. 2-D coherent integration processing and detecting of 736 aircrafts using GNSS-based passive radar. Remote Sens. 2018, 10, 1164. [Google Scholar] [CrossRef]
- Chen, V.C.; Ling, H. Joint time–frequency analysis for radar signal and image processing. IEEE Trans. Signal Process. Mag. 1999, 16, 81–93. [Google Scholar] [CrossRef]
- Tang, S.; Zhang, L.; Guo, P.; Liu, G.; Zhang, Y.; Li, Q.; Gu, Y.; Lin, C. Processing of monostatic SAR with general configurations. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6529–6546. [Google Scholar] [CrossRef]
- Xiong, B.; Xu, J.; Peng, S.; Yang, J. Ground moving targets signal modeling for multi-channel squint-looking SAR. In Proceedings of the International Radar Conference, Xi’an, China, 14–16 April 2013; pp. 1–7. [Google Scholar]
- Jing, K.; Xu, J.; Huang, Z.; Yao, D.; Long, T. GMTI for squint looking XTI-SAR with rotatable forward-looking array. Sensors 2016, 16, 873. [Google Scholar] [CrossRef] [PubMed]
- Garren, D.A. Signature morphology effects of squint angle for arbitrarily moving surface targets in spotlight synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6241–6251. [Google Scholar] [CrossRef]
- Garber, W.; Pierson, W.; Meginnis, R.; Majumder, U.; Minardi, M.; Sobota, D. Performance evaluation of SAR/GMTI algorithms. Proc. SPIE. 2016, 9843, 1–14. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithm and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Yang, J.; Liu, C.; Wang, Y. Imaging and parameter estimation of fast-moving targets with signle-antenna SAR. IEEE Geosci. Remote Sens. Lett. 2014, 11, 529–533. [Google Scholar] [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.G.; Ma, J.; Ma, J. Long-time coherent integration for weak maneuvering target detection and high-order motion parameter estimation based on keystone transform. IEEE Trans. Signal Process. 2016, 64, 4013–4026. [Google Scholar] [CrossRef]
- Sun, G.; Xing, M.; Xia, X.G.; Wu, Y.; Bao, Z. Robust ground moving-target imaging using deramp-keystone processing. IEEE Trans. Geosci. Remote Sens. 2013, 51, 966–982. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y. An airborne SAR moving target imaging and motion parameters estimation algorithm with azimuth-dechirping and the second-order keystone transform applied. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 3967–3976. [Google Scholar] [CrossRef]
- Yang, J.; Liu, C.; Wang, Y. Detection and imaging of ground moving targets with real SAR data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 920–932. [Google Scholar] [CrossRef]
- Yang, J.; Huang, X.; Jin, T.; Thompson, J.; Zhou, Z. New approach for SAR imaging of ground moving targets based on a Keystone transform. IEEE Geosci. Remote Sens. Lett. 2011, 8, 829–833. [Google Scholar]
- Tang, S.; Zhang, L.; So, H.C. Focusing high-resolution highly-squinted airborne SAR data with maneuvers. Remote Sens. 2018, 10, 862. [Google Scholar] [CrossRef]
- Lin, C.; Tang, S.; Zhang, L.; Guo, P. Focusing high-resolution airborne SAR with topography variations using an extended BPA based on a time/frequency rotation principle. Remote Sens. 2018, 10, 1275. [Google Scholar] [CrossRef]
- Robinson, P.N. Depth of field for SAR with aircraft acceleration. IEEE Trans. Aerosp. Electron. Syst. 1984, 20, 603–616. [Google Scholar] [CrossRef]
- Wang, W.Q. Near-space vehicle-borne SAR with reflector antenna for high-resolution and wide-swath remote sensing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 338–348. [Google Scholar] [CrossRef]
- Davis, M.E. Quest for a simultaneous SAR/GMTI waveform. In Proceedings of the IEEE Radar Conference, Monterey, CA, USA, 11–14 September 2013; pp. 134–139. [Google Scholar]
- Liu, X.; Zhou, P.; Zhang, X.; Sun, W.; Dai, Y. The parameter design results of near space airship SAR system. In Proceedings of the IEEE International Geoscience and Remoting Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 1102–1105. [Google Scholar]
- Shu, Y.; Liao, G.; Yang, Z. Design considerations of PRF for optimizing GMTI performance in azimuth multichannel SAR systems with HRWS imaging capability. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2048–2063. [Google Scholar]
- Xia, X.G. Discrete Chirp-Fourier transform and its application to chirp rate estimation. IEEE Trans. Signal Process. 2000, 48, 3122–3133. [Google Scholar]
- Baumgartner, S.V.; Krieger, G. Fast GMTI algorithm for traffic monitoring based on a priori knowledge. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4626–4641. [Google Scholar] [CrossRef]
- Guerci, J.R.; Baranoski, E.J. Knowledge-aided adaptive radar at DARPA: An overview. IEEE Signal Process. Mag. 2006, 1, 41–50. [Google Scholar] [CrossRef]
- Carter, P.H., II; Pines, D.J.; Rudd, L.V. Approximate performance of periodichy-personic cruise trajectories for global reach. IBM J. Res. Dev. 2000, 44, 703–714. [Google Scholar] [CrossRef]
- Tang, S.; Zhang, L.; Guo, P.; Liu, G.; Sun, G. Acceleration model analyses and imaging algorithm for highly squinted airborne spotlight-mode SAR with maneuvers. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2015, 8, 1120–1131. [Google Scholar] [CrossRef]
- Tang, S.; Lin, C.; Zhou, Y.; So, H.C.; Zhang, L.; Liu, Z. Processing of long integration time spaceborne SAR data with curved orbit. IEEE Trans. Geosci. Remote Sens. 2018, 56, 888–904. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Z.; Zhang, L.; Xiao, J. Micro-Doppler curves extraction and parameters estimation for cone-shaped target with occlusion effect. IEEE Sens. J. 2018, 18, 2892–2902. [Google Scholar] [CrossRef]
- Ward, J. Space Time Adaptive Processing for Airborne Radar; Technical Report; MIT Lincoln Laboratory: Lexington, MA, USA, 1994; p. 1015. [Google Scholar]
- Maori, D.C.; Sikaneta, I. A generalization of DPCA processing for multichannel SAR/GMTI radars. IEEE Trans. Geosci. Remote Sens. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Wang, R.; Wang, X.; Cheng, S.; Meng, Y.; Zhang, G.; Zhou, Y. Plasma passive jamming for SAR based on the resonant absorption effect. IEEE Trans. Plasma Sci. 2018, 46, 928–933. [Google Scholar] [CrossRef]
- Li, N. Research on Availability and Algorithm of Hypersonic Missile-Borne Bistatic SAR. Ph.D. Thesis, Graduate School of National University of Defense Technology, Changsha, China, 2011. [Google Scholar]
- Kennel, C.F. The propagation of electromagnetic waves in plasmas. Proc. IEEE 1965, 53, 2168. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on SAR. IEEE Geosci. Remote Sens. Mag. 2013, 5, 6–43. [Google Scholar] [CrossRef]
- Reigber, A.; Scheiber, R.; Jäger, M.; Prats-Iraola, P.; Hajnsek, I.; Jagdhuber, T.; Papathanassiou, K.; Nannini, M.; Aguilera, E.; Baumgartner, S.; et al. Very-high-resolution airborne synthetic aperture radar imaging: Signal processing and applications. Proc. IEEE 2013, 101, 759–783. [Google Scholar] [CrossRef]
- Lanari, R. A new method for the compensation of the SAR range cell migration based on the chirp z-transform. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 1296–1299. [Google Scholar] [CrossRef]
- Natroshvili, K.; Loffeld, O.; Maya, A.; Ortiz, M.; Knedlik, S. Focusing of general bistatic SAR configuration data with 2-D inverse scaled FFT. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2718–2727. [Google Scholar] [CrossRef]
- Ikram, M.Z.; Meraim, K.A.; Hua, Y. Fast quadratic phase tranform for estimating the parameters of multicomponent chirp signals. Digit. Signal Process. 1997, 7, 127–135. [Google Scholar] [CrossRef]
- Su, J.; Xing, M.; Wang, G.; Bao, Z. High-speed multi-target detection with narrowband radar. IET Radar Sonar Navig. 2010, 4, 595–603. [Google Scholar] [CrossRef]

















| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Carrier frequency | 14.7 GHz | PRF | 2400 Hz |
| Pulse duration | 3 μs | Radar position | (0, 0, 30) km |
| Transmit bandwidth | 70 MHz | (linear) | (0, 2000, 0) m/s |
| Squint angle | 30° | (curvilinear) | (200, 2000, 200) m/s |
| Elevation angle | 60° | (curvilinear) | (−50, −50, −50) m/s2 |
| Method | KT | Azimuth Focusing |
|---|---|---|
| Proposed | ||
| KT based descending stage method [3] | / | / |
| KT based long time coherent integration method [22] | ||
| robust Deramp-Keystone method [23] | / |
| Target | Initial Position | Velocity | SNR |
|---|---|---|---|
| T1 | (51,802, 34,221, 0) m | (4, −3, 0) m/s | −10 dB |
| T2 | (52,092, 34,851, 0) m | (12, 16, 0) m/s | −15 dB |
| T3 | (51,282, 34,041, 0) m | (18, 22, 0) m/s | −5 dB |
| Target | DCS before Pre-Processing | DCS after Pre-Processing | Bandwidth before Pre-Processing | Bandwidth after Pre-Processing |
|---|---|---|---|---|
| T1 | 97,125.6 Hz | −874.4 Hz | 4627.5 Hz | 67.4 Hz |
| T2 | 96,638.5 Hz | −1361.5 Hz | 4593.6 Hz | 69.6 Hz |
| T3 | 95,047.1 Hz | −2952.9 Hz | 4586.3 Hz | 11.6 Hz |
| Target | DCS before Pre-Processing | DCS after Pre-Processing | Bandwidth before Pre-Processing | Bandwidth after Pre-Processing |
|---|---|---|---|---|
| T1 | 103,322 Hz | −891 Hz | 8984 Hz | 43 Hz |
| T2 | 102,869 Hz | −1344 Hz | 9006 Hz | 61 Hz |
| T3 | 101,138 Hz | −3075 Hz | 8896 Hz | 38 Hz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Zhou, Y.; Zhang, L.; Lin, C.; Huang, Y.; Tang, S. Ground Moving Target Imaging and Analysis for Near-Space Hypersonic Vehicle-Borne Synthetic Aperture Radar System with Squint Angle. Remote Sens. 2018, 10, 1966. https://doi.org/10.3390/rs10121966
Chen Z, Zhou Y, Zhang L, Lin C, Huang Y, Tang S. Ground Moving Target Imaging and Analysis for Near-Space Hypersonic Vehicle-Borne Synthetic Aperture Radar System with Squint Angle. Remote Sensing. 2018; 10(12):1966. https://doi.org/10.3390/rs10121966
Chicago/Turabian StyleChen, Zhanye, Yu Zhou, Linrang Zhang, Chunhui Lin, Yan Huang, and Shiyang Tang. 2018. "Ground Moving Target Imaging and Analysis for Near-Space Hypersonic Vehicle-Borne Synthetic Aperture Radar System with Squint Angle" Remote Sensing 10, no. 12: 1966. https://doi.org/10.3390/rs10121966
APA StyleChen, Z., Zhou, Y., Zhang, L., Lin, C., Huang, Y., & Tang, S. (2018). Ground Moving Target Imaging and Analysis for Near-Space Hypersonic Vehicle-Borne Synthetic Aperture Radar System with Squint Angle. Remote Sensing, 10(12), 1966. https://doi.org/10.3390/rs10121966