Improving the Accuracy of Open Source Digital Elevation Models with Multi-Scale Fusion and a Slope Position-Based Linear Regression Method



Abstract
1. Introduction
2. Study Area and Datasets
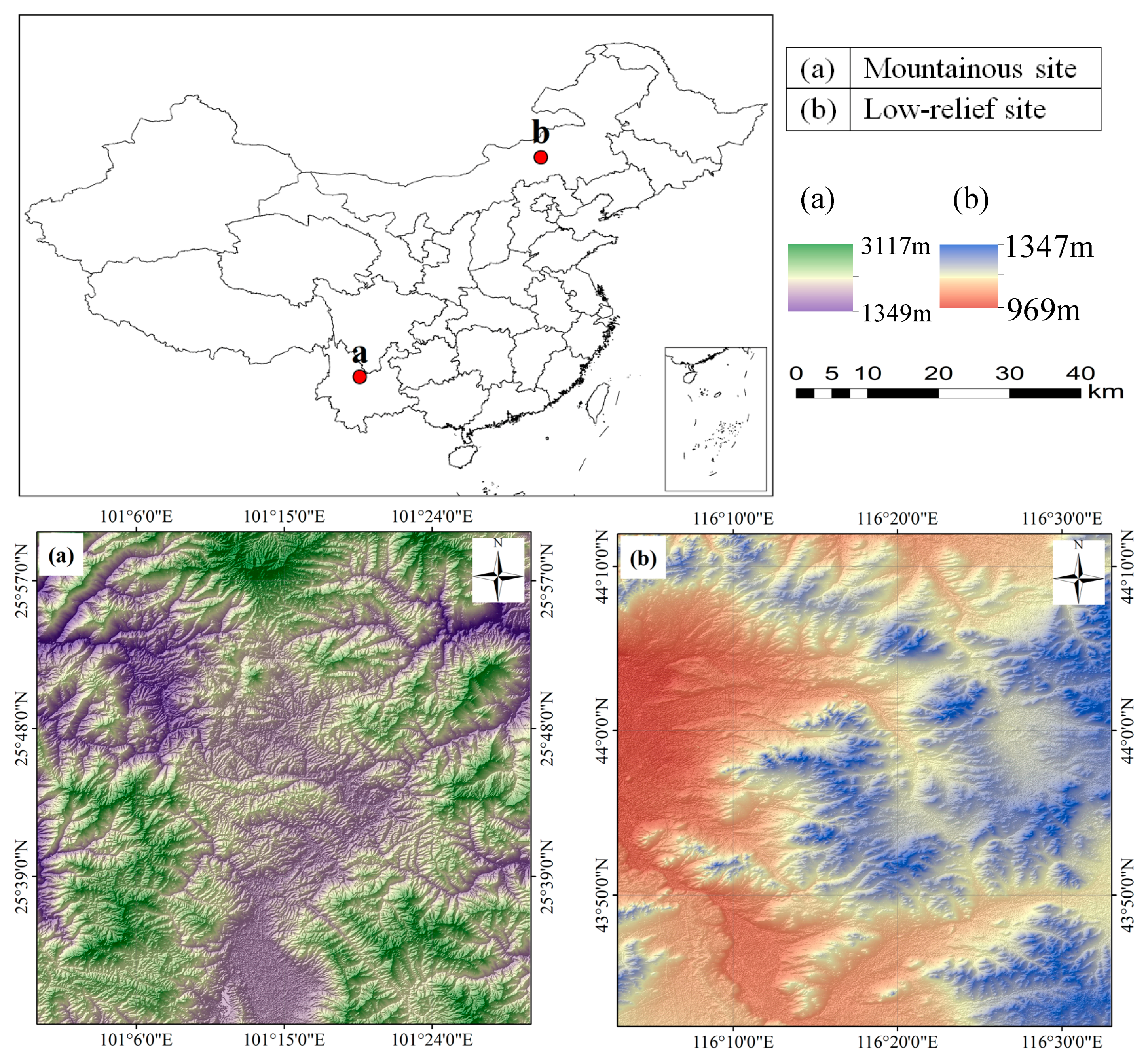
2.1. Study Area
2.2. Datsets
2.2.1. SRTM-1 DEM
2.2.2. AW3D30
2.2.3. ICESat GLAH14
2.3. Data Pre-Processing
2.3.1. DEM Processing
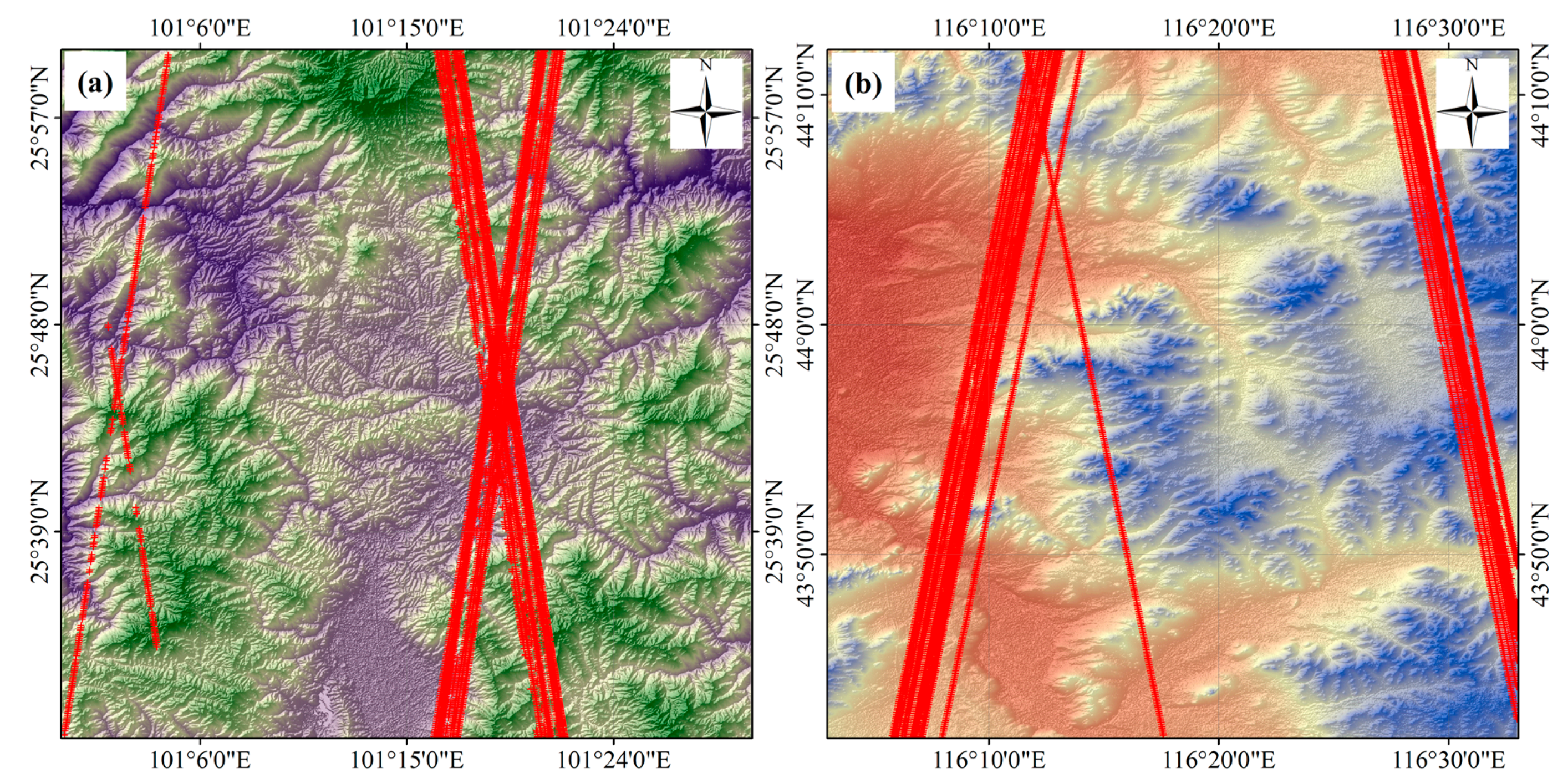
2.3.2. GLAH14 Processing
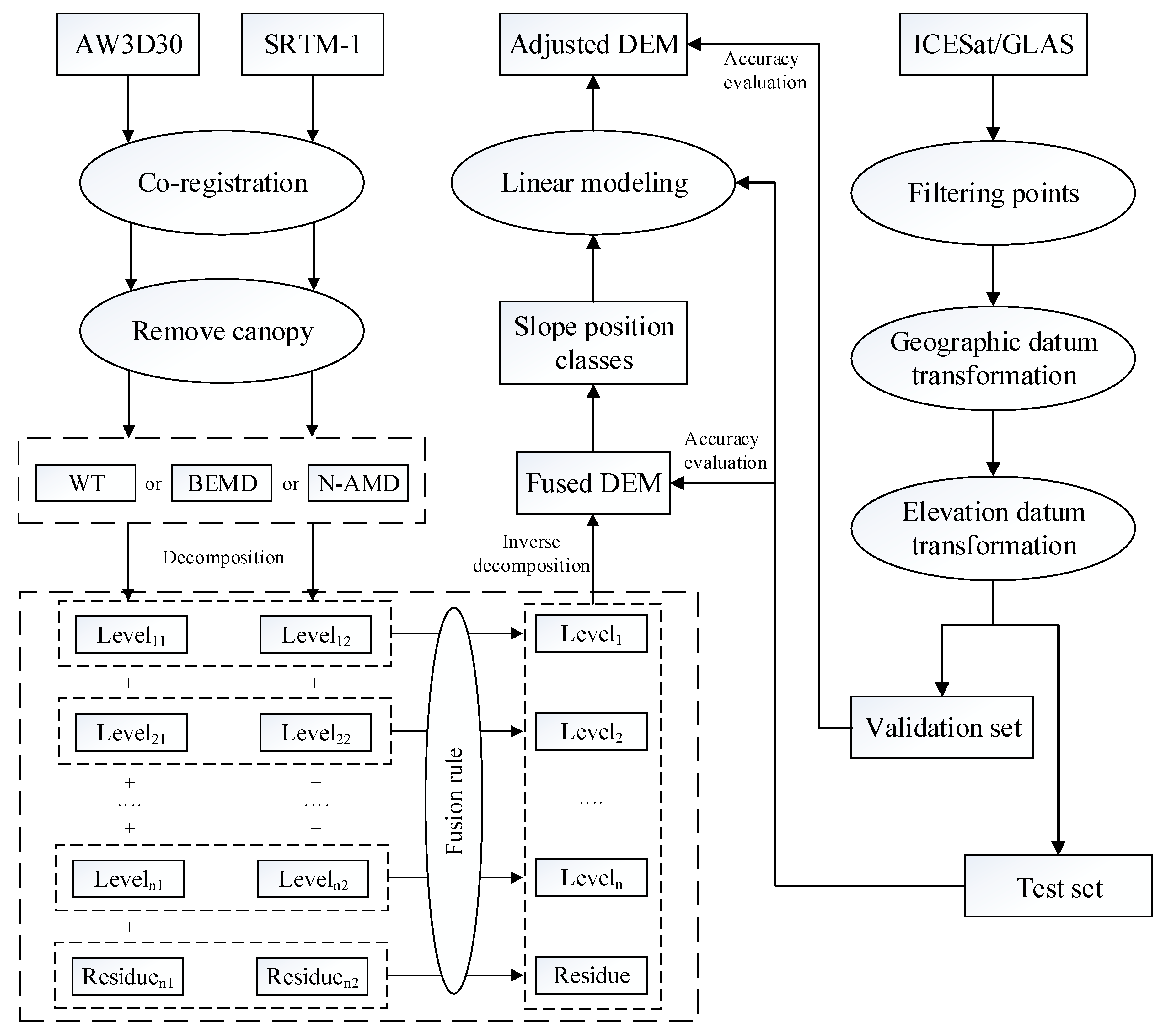
3. Methods
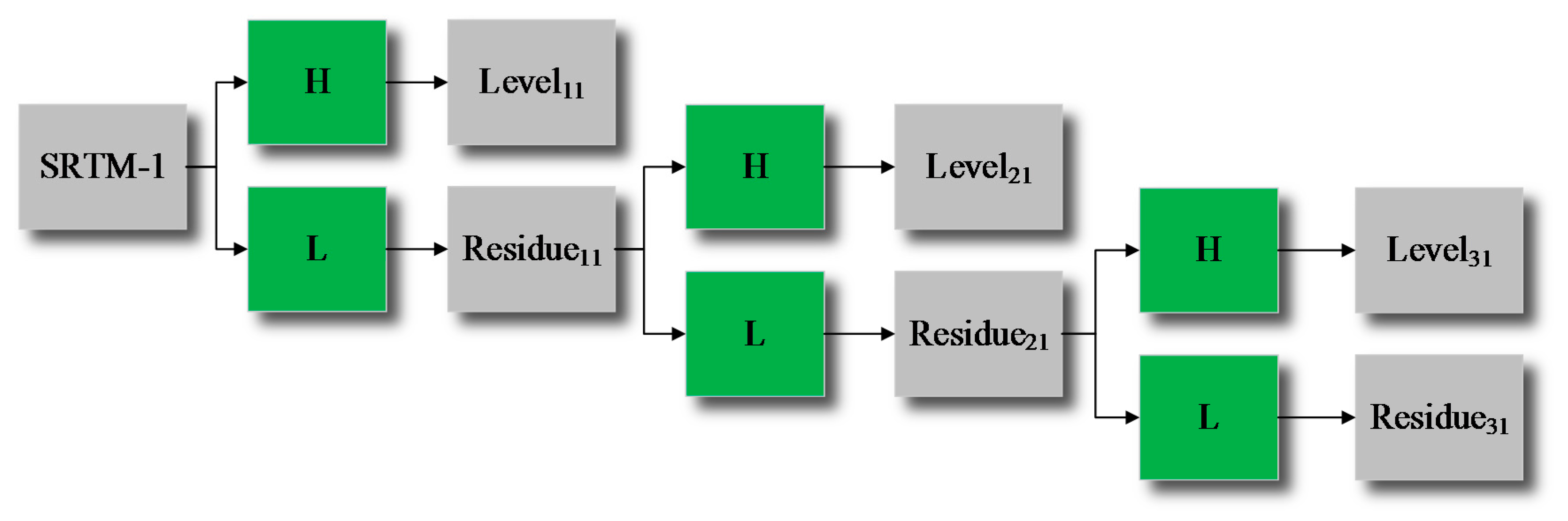
3.1. Multi-Scale Analysis Methods
3.1.1. Wavelet Transform (WT)
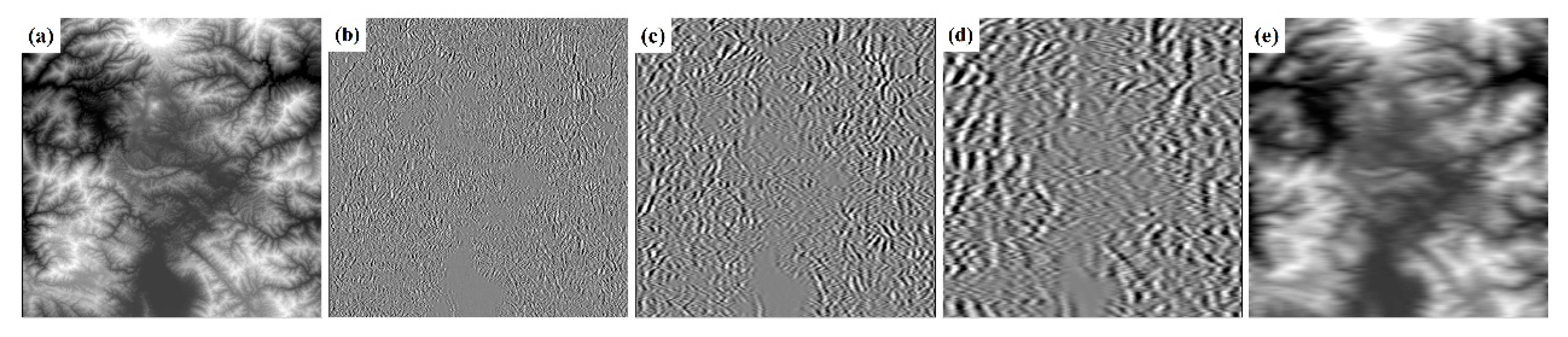
3.1.2. Bidimensional Empirical Mode Decomposition (BEMD)
- Step 1:
- Identify extreme points (both maxima and minima) of image I.
- Step 2:
- Generate upper and lower envelopes by interpolating the maximum and minimum points respectively.
- Step 3:
- Calculate the mean plane m of the two envelopes.
- Step 4:
- Extract the details using d = I – m.
- Step 5:
- Repeat the above steps until d becomes an IMF.
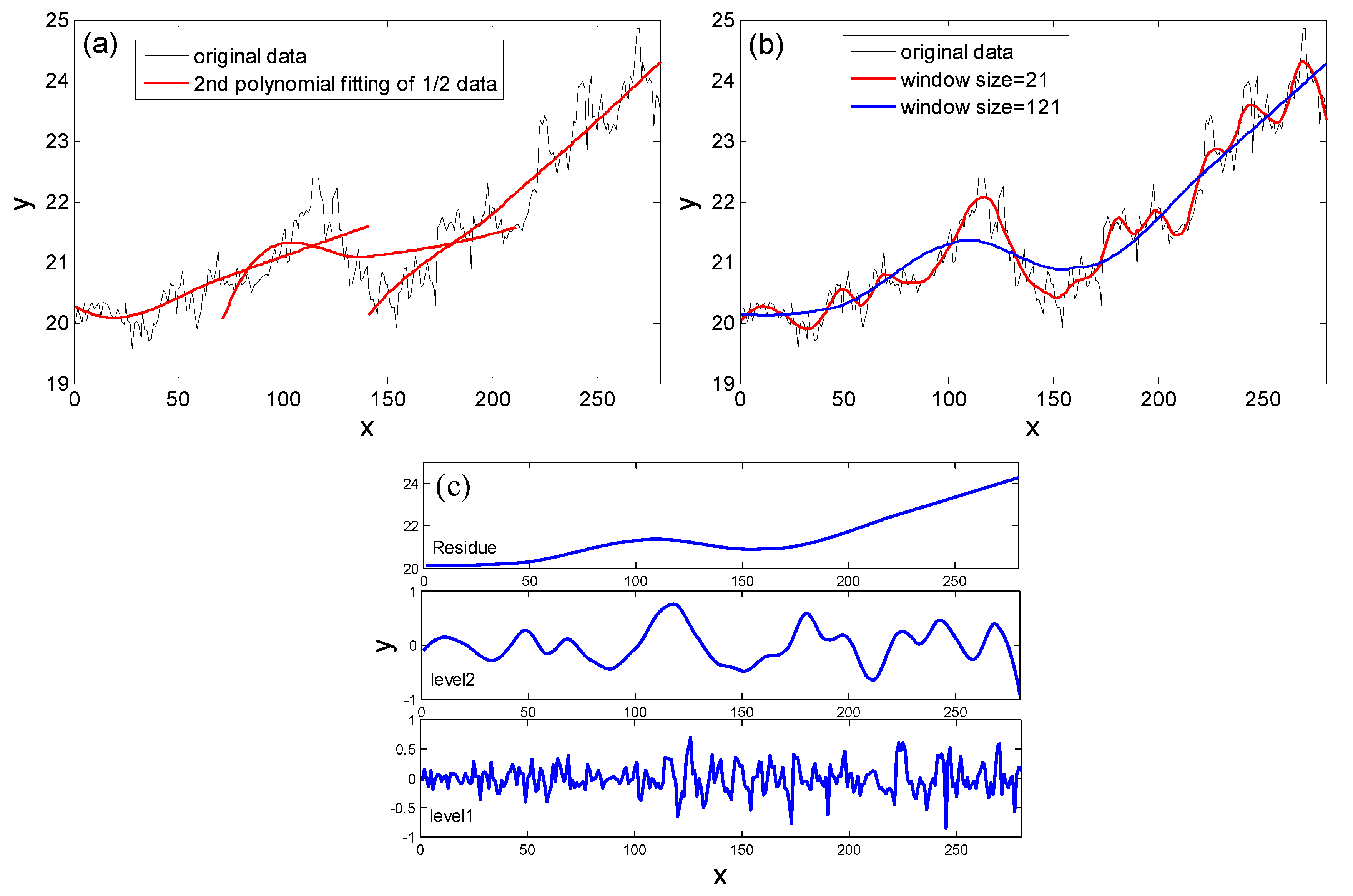
3.1.3. Nonlinear Adaptive Multi-Scale Decomposition (N-AMD)
3.2. Fusion Rule
3.3. Slope Position Classifications
4. Results and Analysis
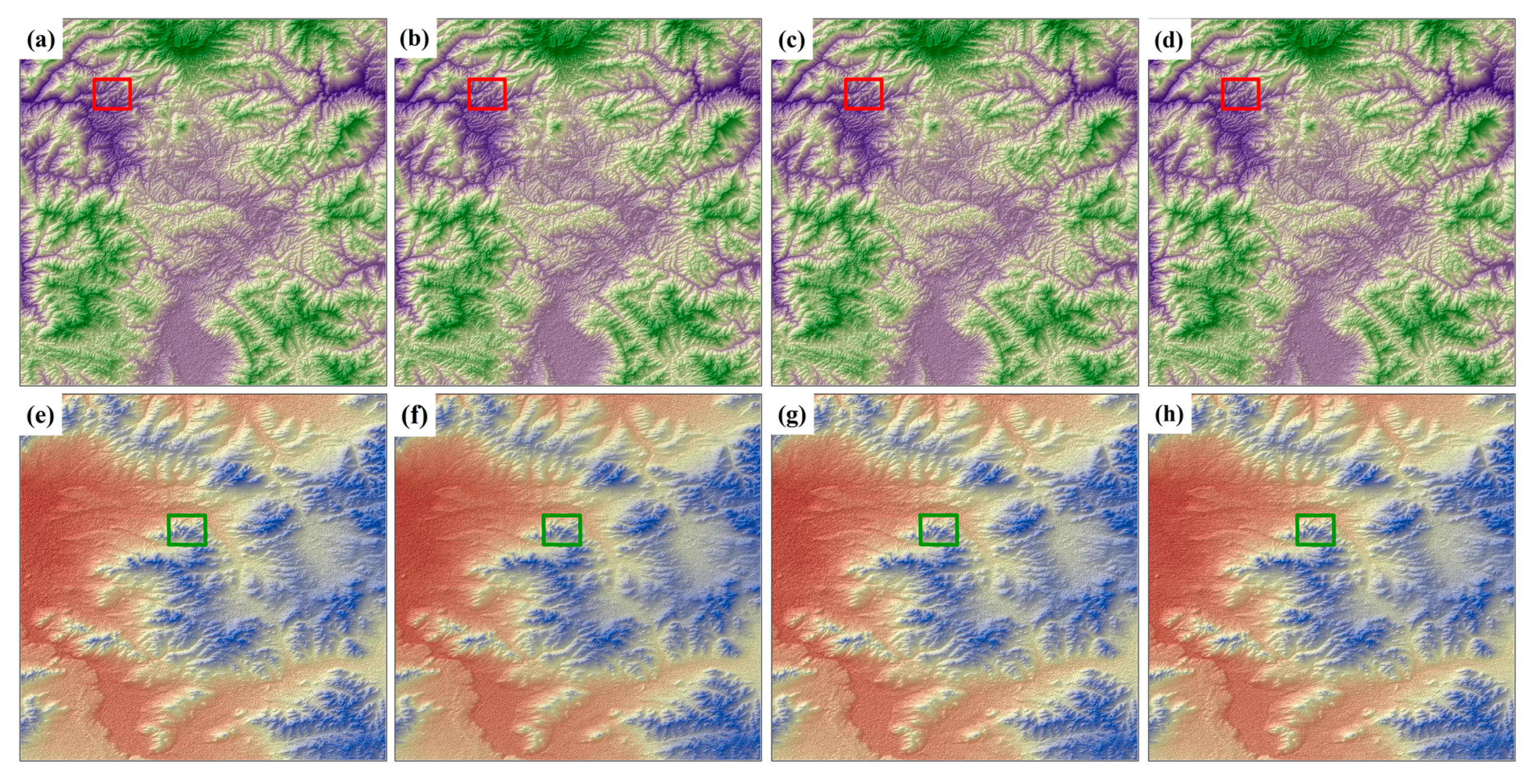
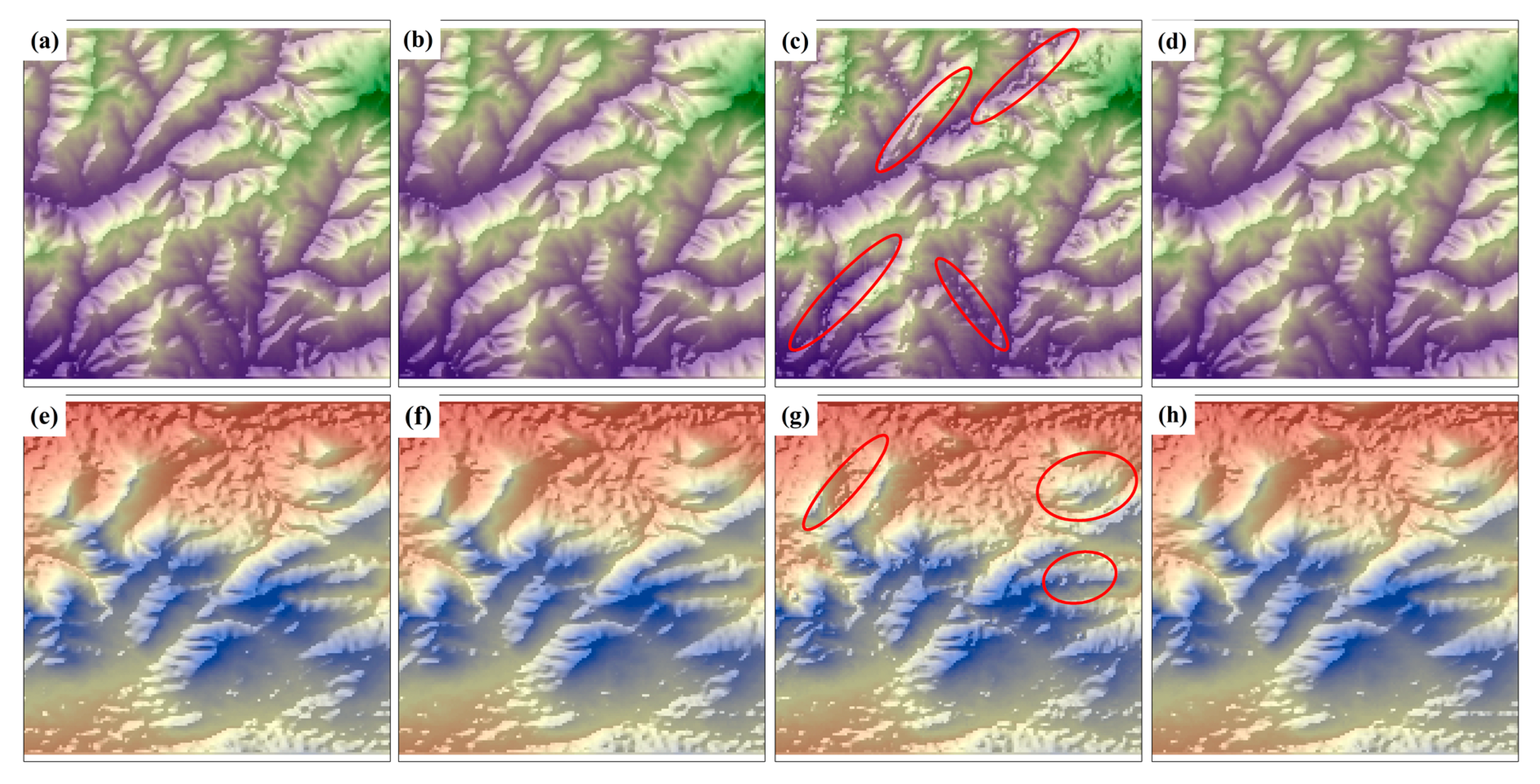
4.1. Fused DEM
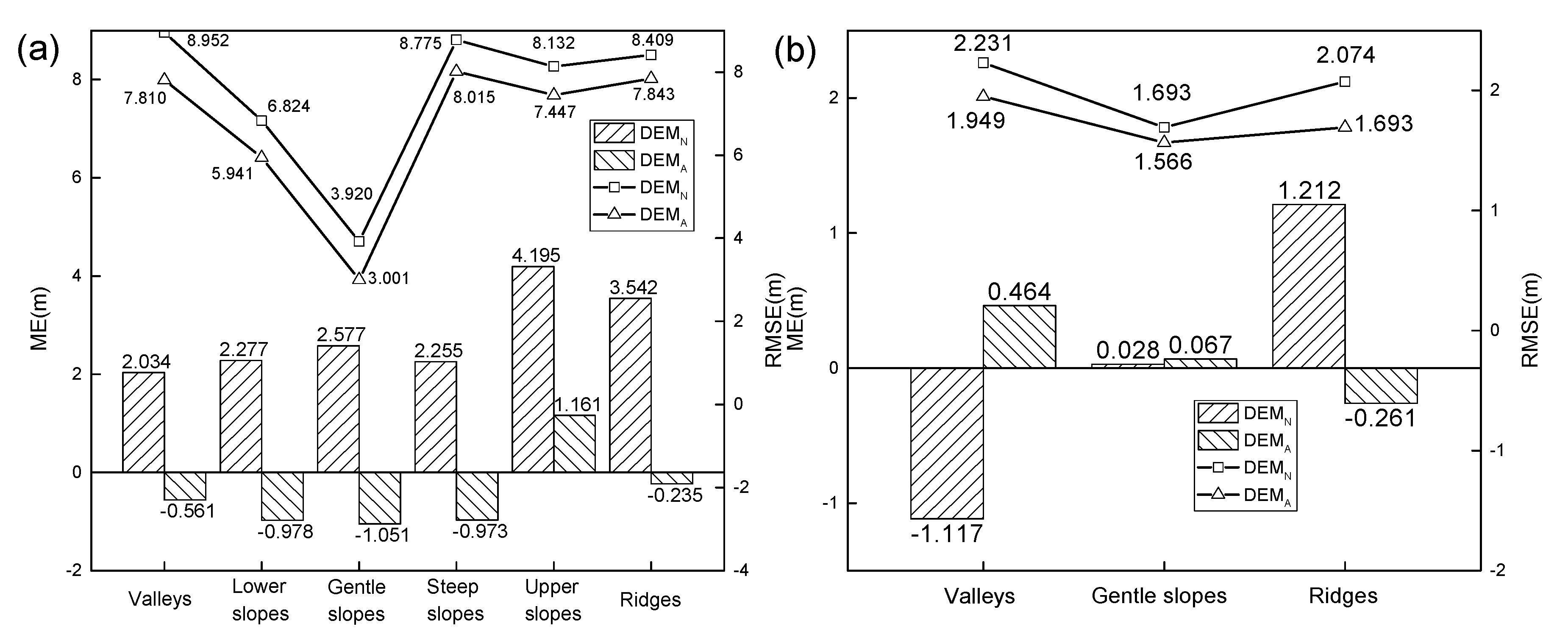
4.2. Fused DEM Errors for Different Slope Position Classifications
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, K.; Smith, L.C.; Chu, V.W.; Gleason, C.J.; Li, M. A Caution on the Use of Surface Digital Elevation Models to Simulate Supraglacial Hydrology of the Greenland Ice Sheet. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 8, 5212–5224. [Google Scholar] [CrossRef]
- Wechsler, S.P. Uncertainties associated with digital elevation models for hydrologic applications: A review. Hydrol. Earth Syst. Sci. 2007, 11, 1481–1500. [Google Scholar] [CrossRef]
- Yan, Y.; Tang, J.; Pilesjö, P. A combined algorithm for automated drainage network extraction from digital elevation models. Hydrol. Process. 2018, 32, 1322–1333. [Google Scholar] [CrossRef]
- Shukla, G.; Garg, R.D.; Srivastava, H.S.; Garg, P.K. Performance analysis of different predictive models for crop classification across an aridic to ustic area of Indian states. Geocarto Int. 2016, 33, 1–48. [Google Scholar] [CrossRef]
- Fu, P.; Rich, P. A geometric solar radiation model with applications in agriculture and forestry. Comput. Electron. Agric. 2002, 37, 25–35. [Google Scholar] [CrossRef]
- Chen, L.; Yang, X.; Chen, L.; Potter, R.; Li, Y. A state-impact-state methodology for assessing environmental impact in land use planning. Environ. Impact Assess. Rev. 2014, 46, 1–12. [Google Scholar] [CrossRef]
- Næsset, E.; Ørka, H.O.; Solberg, S.; Bollandsås, O.M.; Hansen, E.H.; Mauya, E.; Zahabu, E.; Malimbwi, R.; Chamuya, N.; Olsson, H. Mapping and estimating forest area and aboveground biomass in miombo woodlands in Tanzania using data from airborne laser scanning, TanDEM-X, RapidEye, and global forest maps: A comparison of estimated precision. Remote Sens. Environ. 2016, 175, 282–300. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, S.; Sun, P.; Wang, T.; Wang, G.; Wang, L.; Zhang, X. Using DEM to predict Abies faxoniana and Quercus aquifolioides distributions in the upstream catchment basin of the Min River in southwest China. Ecol. Indic. 2016, 69, 91–99. [Google Scholar] [CrossRef]
- Carrara, A.; Bitelli, G.; Carla, R. Comparison of techniques for generating digital terrain models from contour lines. Int. J. Geogr. Inf. Syst. 1997, 11, 451–473. [Google Scholar] [CrossRef]
- Siart, C.; Bubenzer, O.; Eitel, B. Combining digital elevation data (SRTM/ASTER), high resolution satellite imagery (Quickbird) and GIS for geomorphological mapping: A multi-component case study on Mediterranean karst in Central Crete. Geomorphology 2009, 112, 106–121. [Google Scholar] [CrossRef]
- Kervyn, M.; Ernst, G.G.J.; Goossens, R.; Jacobs, P. Mapping volcano topography with remote sensing: ASTER vs. SRTM. Int. J. Remote Sens. 2008, 29, 6515–6538. [Google Scholar] [CrossRef]
- Malthus, T.J. Bio-Optical Modeling and Remote Sensing of Aquatic Macrophytes. In Bio-optical Modeling and Remote Sensing of Inland Waters; Mishra, D.R., Ogashawara, I., Gitelson, A., Eds.; Elsevier: Amsterdam, the Netherlands, 2017; pp. 263–308. [Google Scholar]
- Florinsky, I.V.; Skrypitsyna, T.N.; Luschikova, O.S. Comparative accuracy of the AW3D30 DSM, ASTER GDEM, and SRTM1 DEM: A case study on the Zaoksky testing ground, central European Russia. Remote Sens. Lett. 2018, 9, 706–714. [Google Scholar] [CrossRef]
- Ehlers, M.; Welch, R. Stereocorrelation of Landsat TM images. Photogramm. Eng. Remote Sens. 1987, 53, 1231–1237. [Google Scholar]
- Evans, D.L.; Apel, J.; Arvidson, R.; Bindschadler, R.; Carsey, F.; Dozier, J.; Jezek, K.; Kasischke, E.; Li, F.; Melack, J. Spaceborne Synthetic Aperture Radar: Current Status and Future Directions. A Report to the Committee on Earth Sciences; Space Studies Board, National Research Council: Washington, DC, USA, 1995; Volume 27, pp. 149–150. [Google Scholar]
- Pham, H.T.; Marshall, L.; Johnson, F.; Sharma, A. A method for combining SRTM DEM and ASTER GDEM2 to improve topography estimation in regions without reference data. Remote Sens. Environ. 2018, 210, 229–241. [Google Scholar] [CrossRef]
- Jarihani, A.A.; Callow, J.N.; McVicar, T.R.; Van Niel, T.G.; Larsen, J.R. Satellite-derived Digital Elevation Model (DEM) selection, preparation and correction for hydrodynamic modelling in large, low-gradient and data-sparse catchments. J. Hydrol. 2015, 524, 489–506. [Google Scholar] [CrossRef]
- Rawat, K.S.; Mishra, A.K.; Sehgal, V.K.; Ahmed, N.; Tripathi, V.K. Comparative evaluation of horizontal accuracy of elevations of selected ground control points from ASTER and SRTM DEM with respect to CARTOSAT-1 DEM: A case study of Shahjahanpur district, Uttar Pradesh, India. Geocarto Int. 2013, 28, 439–452. [Google Scholar] [CrossRef]
- Reinoso, J.F. An algorithm for automatically computing the horizontal shift between homologous contours from DTMs. ISPRS J. Photogramm. Remote Sens. 2011, 66, 272–286. [Google Scholar] [CrossRef]
- Reinoso, J.F.; León, C.; Mataix, J. Estimating horizontal displacement between DEMs by means of particle image velocimetry techniques. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Nuth, C.; Kääb, A. Co-registration and bias corrections of satellite elevation data sets for quantifying glacier thickness change. Cryosphere 2011, 5, 271–290. [Google Scholar] [CrossRef]
- O’Loughlin, F.E.; Paiva, R.C.D.; Durand, M.; Alsdorf, D.E.; Bates, P.D. A multi-sensor approach towards a global vegetation corrected SRTM DEM product. Remote Sens. Environ. 2016, 182, 49–59. [Google Scholar] [CrossRef]
- Baugh, C.A.; Bates, P.D.; Schumann, G.; Trigg, M.A. SRTM vegetation removal and hydrodynamic modeling accuracy. Water Resour. Res. 2013, 49, 5276–5289. [Google Scholar] [CrossRef]
- Reuter, H.I.; Nelson, A.; Jarvis, A. An evaluation of void-filling interpolation methods for SRTM data. Int. J. Geogr. Inf. Sci. 2007, 21, 983–1008. [Google Scholar] [CrossRef]
- Paredes-Hernández, C.U.; Tate, N.J.; Tansey, K.J.; Fisher, P.F.; Salinas-Castillo, W.E. Increasing the accuracy of digital elevation models by means of geostatistical conflation. In Proceedings of the 9th International Symposium on Spatial Accuracy Assessment in Natural Resources and Environmental Sciences, Leicester, UK, 20–23 July 2010. [Google Scholar]
- Felgueiras, C.A.; Ortiz, J.O.; Camargo, E.C.G. Application of geostatistical conflation techniques to improve the accuracy of digital elevation models. Proc. Braz. Symp. GeoInform. 2014, 149–155. [Google Scholar] [CrossRef]
- Kääb, A. Combination of SRTM3 and repeat ASTER data for deriving alpine glacier flow velocities in the Bhutan Himalaya. Remote Sens. Environ. 2005, 94, 463–474. [Google Scholar] [CrossRef]
- Fabris, M.; Baldi, P.; Anzidei, M.; Pesci, A.; Bortoluzzi, G.; Aliani, S. High resolution topographic model of Panarea Island by fusion of photogrammetric, lidar and bathymetric digital terrain models. Photogramm. Rec. 2010, 25, 382–401. [Google Scholar] [CrossRef]
- Podobnikar, T. Production of integrated digital terrain model from multiple datasets of different quality. Int. J. Geogr. Inf. Sci. 2005, 19, 69–89. [Google Scholar] [CrossRef]
- Schultz, H.; Riseman, E.M.; Stolle, F.R.; Woo, D.M. Error Detection and DEM Fusion Using Self-Consistency. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Honikel, M. Improvement of INSAR DEM accuracy using data and sensor fusion. In 1998 IEEE International Geoscience and Remote Sensing. Symposium Proceedings; IEEE: New York, NY, USA, 1998; Volume 5, pp. 2348–2350. [Google Scholar]
- Schindler, K.; Papasaika-Hanusch, H.; Schutz, S.; Baltsavias, E. Improving wide-area DEMs through data fusion-chances and limits. Proc. Photogramm. Week 2011, 11, 159–170. [Google Scholar]
- Karkee, M.; Steward, B.L.; Aziz, S.A. Improving quality of public domain digital elevation models through data fusion. Biosyst. Eng. 2008, 101, 293–305. [Google Scholar] [CrossRef]
- Tadono, T.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. Precise Global DEM Generation by ALOS PRISM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, ii-4, 71–76. [Google Scholar] [CrossRef]
- JAXA ALOS Global Digital Surface Model “ALOS World 3D-30m (AW3D30)”. Available online: http://www.eorc.jaxa.jp/ALOS/en/aw3d30/ (accessed on 20 April 2018).
- Santillan, J.R.; Makinanosantillan, M. Vertical Accuracy Assessment of 30-M Resolution Alos, Aster, and Srtm Global Dems Over Northeastern Mindanao, Philippines. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 149–156. [Google Scholar] [CrossRef]
- Gao, J. Resolution and accuracy of terrain representation by grid DEMs at a micro-scale. Int. J. Geogr. Inf. Syst. 1997, 11, 199–212. [Google Scholar] [CrossRef]
- Honikel, M. Fusion of optical and radar digital elevation models in the spatial frequency domain. In Proceedings of the Second Int. Workshop on Retreieval of Bio- and Geophysical Parameters from SAR Data for Land Application, Noordwijwk, The Newerlands, October 1998; pp. 537–543. [Google Scholar]
- Hu, J.; Gao, J.; Wang, X. Multifractal analysis of sunspot time series: The effects of the 11-year cycle and Fourier truncation. J. Stat. Mech. Theory Exp. 2009, P02066, 57–94. [Google Scholar] [CrossRef]
- Tung, W.W.; Gao, J.; Hu, J.; Yang, L. Detecting chaos in heavy-noise environments. Phys. Rev. E 2011, 83, 46210. [Google Scholar] [CrossRef] [PubMed]
- Gao, J.; Sultan, H.; Hu, J.; Tung, W.W. Denoising Nonlinear Time Series by Adaptive Filtering and Wavelet Shrinkage: A Comparison. IEEE Signal Process. Lett. 2009, 17, 237–240. [Google Scholar]
- Yang, X.; Long, L.I.; Chen, L.; Chen, L.; Shen, Z. Improving ASTER GDEM accuracy using land use-based linear regression methods: A case study of Lianyungang, East China. Int. J. Geo-Inf. 2018, 7, 145. [Google Scholar] [CrossRef]
- Zyl, J.J. Van The Shuttle Radar Topography Mission (SRTM): A breakthrough in remote sensing of topography. Acta Astronaut. 2001, 48, 559–565. [Google Scholar]
- Gamache, M.; Guild, A.M. Free and Low Cost Datasets for International Mountain Cartography. In Proceedings of the 4th ICA Mountain Cartography Workshop, Catalonia, Spain, 30 September–2 October 2004. [Google Scholar]
- Takaku, J.; Tadono, T.; Tsutsui, K.; Ichikawa, M. Validation of “AW3D” Global Dsm Generated from Alos Prism. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. 2016, III-4, 25–31. [Google Scholar] [CrossRef]
- Satgé, F.; Bonnet, M.P.; Timouk, F.; Calmant, S.; Pillco, R.; Molina, J.; Lavado-Casimiro, W.; Arsen, A.; Crétaux, J.F.; Garnier, J. Accuracy assessment of SRTM v4 and ASTER GDEM v2 over the Altiplano watershed using ICESat/GLAS data. Int. J. Remote Sens. 2015, 36, 465–488. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.; Riris, H.; Sirota, J.M.; Mcgarry, J.F.; Palm, S.; Yi, D.; Liiva, P. Geoscience Laser Altimeter System (GLAS) on the ICESat Mission: On-orbit measurement performance. Geophys. Res. Lett. 2003, 32. [Google Scholar] [CrossRef]
- Shuman, C.A.; Zwally, H.J.; Schutz, B.E.; Brenner, A.C.; Dimarzio, J.P.; Suchdeo, V.P.; Fricker, H.A. ICESat Antarctic elevation data: Preliminary precision and accuracy assessment. Geophys. Res. Lett. 2015, 33, 359–377. [Google Scholar] [CrossRef]
- Fricker, H.A.; Borsa, A.; Minster, B.; Carabajal, C.; Quinn, K.; Bills, B. Assessment of ICESat performance at the salar de Uyuni, Bolivia. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Huber, M.; Wessel, B.; Kosmann, D.; Felbier, A.; Schwieger, V.; Habermeyer, M.; Wendleder, A.; Roth, A. Ensuring Globally the TanDEM-X Height Accuracy: Analysis of the Reference Data Sets ICESat, SRTM and KGPS-Tracks. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS ’09), Cape Town, South Africa, 12–17 June 2009; pp. 769–772. [Google Scholar]
- Arefi, H.; Reinartz, P. Accuracy Enhancement of ASTER Global Digital Elevation Models Using ICESat Data. Remote Sens. 2011, 3, 1323–1343. [Google Scholar] [CrossRef]
- Van Niel, T.G.; Mcvicar, T.R.; Li, L.T.; Gallant, J.C.; Yang, Q.K. The impact of misregistration on SRTM and DEM image differences. Remote Sens. Environ. 2008, 112, 2430–2442. [Google Scholar] [CrossRef]
- Gallant, J.C.; Read, A.M.; Dowling, T.I. Removal of Tree Offsets from Srtm and Other Digital Surface Models. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B4, 275–280. [Google Scholar] [CrossRef]
- Yue, L.; Shen, H.; Zhang, L.; Zheng, X.; Zhang, F.; Yuan, Q. High-quality seamless DEM generation blending SRTM-1, ASTER GDEM v2 and ICESat/GLAS observations. Isprs J. Photogramm. Remote Sens. 2017, 123, 20–34. [Google Scholar] [CrossRef]
- Baghdadi, N.; Lemarquand, N.; Abdallah, H.; Bailly, J.S. The Relevance of GLAS/ICESat Elevation Data for the Monitoring of River Networks. Remote Sens. 2011, 3, 708–720. [Google Scholar] [CrossRef]
- Aghajani, A.; Kazemzadeh, R.; Ebrahimi, A. A novel hybrid approach for predicting wind farm power production based on wavelet transform, hybrid neural networks and imperialist competitive algorithm. Energy Convers. Manag. 2016, 121, 232–240. [Google Scholar] [CrossRef]
- Belayneh, A.; Adamowski, J.; Khalil, B.; Quilty, J. Coupling machine learning methods with wavelet transforms and the bootstrap and boosting ensemble approaches for drought prediction. Atmos. Res. 2016, 172–173, 37–47. [Google Scholar] [CrossRef]
- Yu, M.; Guo, H.; Zou, C. Application of wavelet analysis to GPS deformation monitoring. In Proceedings of the Position, Location, and Navigation Symposium, Coronado, CA, USA, 24–27 April 2006; pp. 670–676. [Google Scholar]
- Mallat, S. A Wavelet Tour of Signal Processing; Academic Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Daubechies, I.; Heil, C. Ten Lectures on Wavelets. Comput. Phys. 1998, 6, 1671. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Chi, C.T.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-Stationary Time Series Analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Nunes, J.C.; Bouaoune, Y.; Delechelle, E.; Niang, O.; Bunel, P. Image analysis by bidimensional empirical mode decomposition. Image Vis. Comput. 2003, 21, 1019–1026. [Google Scholar] [CrossRef]
- Equis, S.; Jacquot, P. The empirical mode decomposition: A must-have tool in speckle interferometry? Opt. Express 2009, 17, 611–623. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Wang, L.; Sun, Z.; Jiang, Y.; Zhai, G. Fusion of color microscopic images based on bidimensional empirical mode decomposition. Opt. Express 2010, 18, 21757–21769. [Google Scholar] [CrossRef] [PubMed]
- Burt, P.J.; Kolczynski, R.J. Enhanced image capture through fusion. In Proceedings of the 1993 (4th) International Conference on Computer Vision, Berlin, Germany, 11–14 May 1993; pp. 173–182. [Google Scholar]
- Weiss, A. Topographic Position and Landforms Analysis. In Proceedings of the ESRI User Conference, San Diego, CA, USA, 9–13 July 2001. [Google Scholar]
- Wilson, J.P.; Gallant, J.C. Terrain Analysis: Principles and Applications; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- Strebeck, J.; Kroenung, G.; Grohman, G. Filling SRTM Voids: The Delta Surface Fill Method. Photogramm. Eng. Remote Sens. 2006, 72, 213–216. [Google Scholar]
- Gong, J.Z.; Liu, Y.S.; Xia, B.C.; Chen, J.F. Effect of Wavelet Basis and Decomposition Levels on Performance of Fusion Images from Remotely Sensed Data. Geogr. Geo-Inf. Sci. 2010, 26, 6–186. [Google Scholar]
- Hoja, D.; D’Angelo, P. Analysis of DEM combination methods using high resolution optical stereo imagery and interferometric SAR data. In Proceedings of the ISPRS HighResolution Earth Imaging for Geospatial Information, Hannover, Germany, 2–5 June 2009, ISSN 1682-1777. [Google Scholar]
- Forkuor, G.; Maathuis, B. Comparison of SRTM and ASTER Derived Digital Elevation Models over Two Regions in Ghana–Implications for Hydrological and Environmental Modeling. In Studies on Environmental and Applied Geomorphology; InTech: Rijeka, Croatia, 2012; pp. 219–240. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SRTM-1 | AW3D30 | ICESat Product | |
|---|---|---|---|
| Geographic datum | WGS84 | GRS80 | Topex/Poseion |
| Elevation datum | EGM96 | EGM96 | Topex/Poseion |
| Resolution | 1′′ (30 m) | 1′′ (30 m) | 70 m |
| Horizontal accuracy | 20 m | 5 m | 6 m |
| Vertical accuracy | 16 m | 5 m | 0.15 m |
| Slope Position | SDE Thresholds | Slope Position | SDE Thresholds |
|---|---|---|---|
| Mountainous Area(A) | Low-Relief Area(B) | ||
| Valleys | TPI ≤−1.0 SDE | Valleys | TPI > +1.0 SDE |
| Lower slopes | −1.0 SDE < TPI ≤ −0.5 SDE | Gentle slopes | −1.0 SDE < TPI ≤ +1.0 SDE |
| Gentle slopes | −0.5 SDE < TPI ≤ +0.5SDE, Slope ≤ ST | Hills | +1.0 SDE < TPI |
| Steep slopes | −0.5 SDE < TPI ≤ +0.5SDE, Slope > ST | ||
| Upper slopes | +0.5SDE < TPI ≤ +1.0 SDE | ||
| Ridges | TPI > +1.0 SDE |
| DEMs | Site A | Site B | ||
|---|---|---|---|---|
| ME (m) | RMSE (m) | ME (m) | RMSE (m) | |
| AW3D30 | 4.5 | 9.535 | −1.296 | 2.252 |
| SRTM-1 | 2.125 | 10.928 | 1.068 | 2.619 |
| Bior3.7 wavelet | 3.235 | 9.08 | −0.224 | 2.07 |
| Haar wavelet | 3.326 | 8.916 | −0.134 | 1.999 |
| BEMD | 3.235 | 10.949 | −0.152 | 2.191 |
| N-AMD | 3.173 | 7.696 | −0.114 | 1.902 |
| Error | Site A | Site B | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Valleys | Lower Slopes | Gentle Slopes | Steep Slopes | Upper Slopes | Ridges | Valleys | Gentle Slopes | Hills | |
| ME(m) | 2.207 | 3.345 | 3.534 | 3.093 | 2.944 | 3.749 | −1.634 | −0.053 | 1.364 |
| RMSE(m) | 9.141 | 6.117 | 3.735 | 8.331 | 7.497 | 9.183 | 2.718 | 1.357 | 2.697 |
| Sites | GLAH14 | DEMN | DEMA | DEMw | |||
|---|---|---|---|---|---|---|---|
| ME (m) | RMSE (m) | ME (m) | RMSE (m) | ME (m) | RMSE (m) | ||
| A | 1712 | 2.789 | 7.947 | −0.241 | 6.672 | 2.544 | 7.682 |
| B | 2136 | 0.016 | 1.956 | 0.038 | 1.69 | 0.072 | 1.921 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Lei, S.; Bian, Z.; Lu, J.; Zhang, S.; Fang, J. Improving the Accuracy of Open Source Digital Elevation Models with Multi-Scale Fusion and a Slope Position-Based Linear Regression Method. Remote Sens. 2018, 10, 1861. https://doi.org/10.3390/rs10121861
Tian Y, Lei S, Bian Z, Lu J, Zhang S, Fang J. Improving the Accuracy of Open Source Digital Elevation Models with Multi-Scale Fusion and a Slope Position-Based Linear Regression Method. Remote Sensing. 2018; 10(12):1861. https://doi.org/10.3390/rs10121861
Chicago/Turabian StyleTian, Yu, Shaogang Lei, Zhengfu Bian, Jie Lu, Shubi Zhang, and Jie Fang. 2018. "Improving the Accuracy of Open Source Digital Elevation Models with Multi-Scale Fusion and a Slope Position-Based Linear Regression Method" Remote Sensing 10, no. 12: 1861. https://doi.org/10.3390/rs10121861
APA StyleTian, Y., Lei, S., Bian, Z., Lu, J., Zhang, S., & Fang, J. (2018). Improving the Accuracy of Open Source Digital Elevation Models with Multi-Scale Fusion and a Slope Position-Based Linear Regression Method. Remote Sensing, 10(12), 1861. https://doi.org/10.3390/rs10121861