Continuous Change Detection of Forest/Grassland and Cropland in the Loess Plateau of China Using All Available Landsat Data

 ,
, 
 , ,
, ,
Abstract

1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Dense Landsat Time-Series Imagery
2.2.1. Data Collection
2.2.2. Data Pre-Processing
2.3. Training and Validation Data
2.3.1. Sample Selection
2.3.2. Auxiliary Data for Validation
2.4. Continuous Change Detection Algorithm for Forest/Grassland and Cropland
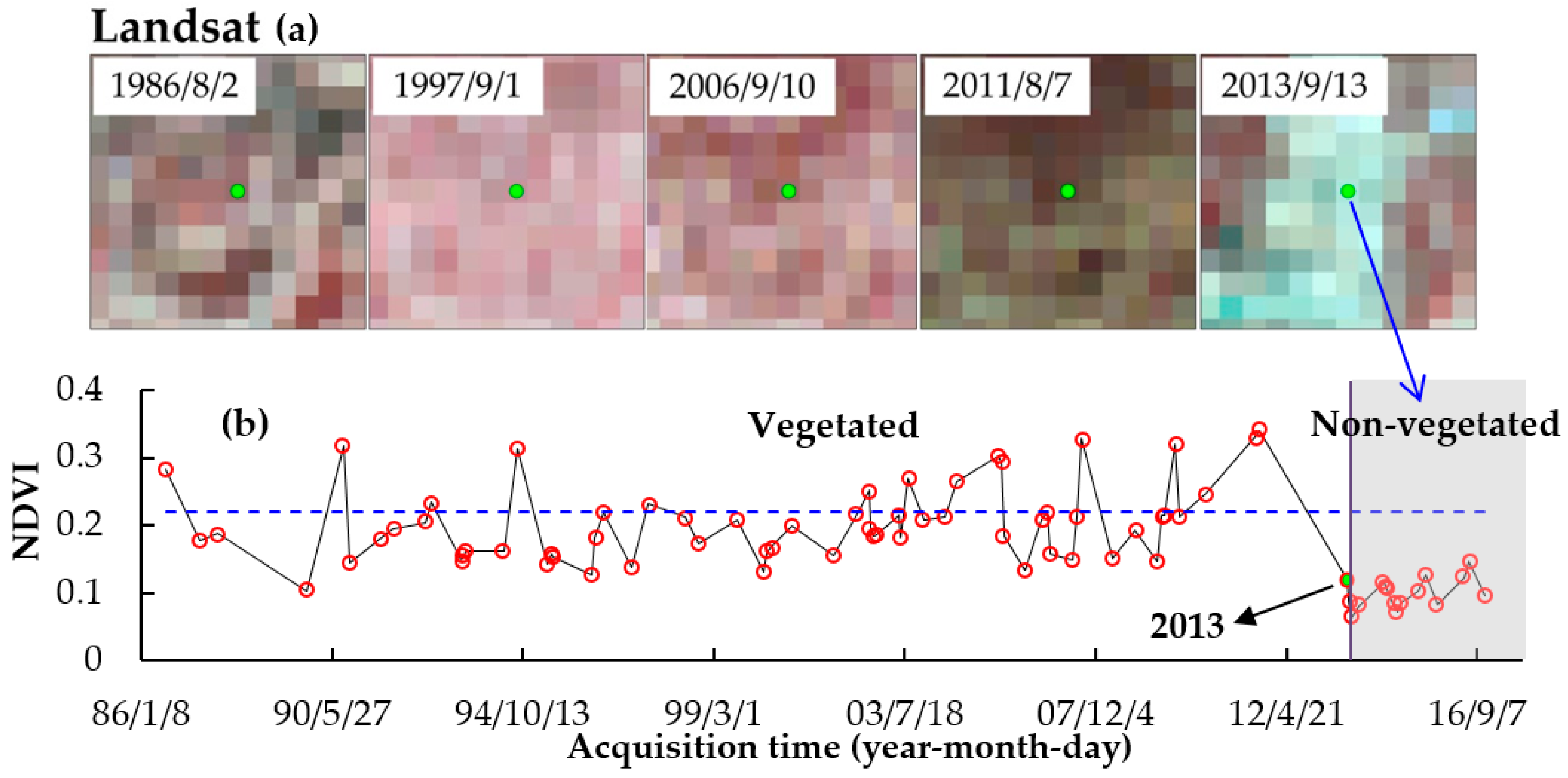
2.4.1. Determination of the Period of Vegetation Coverage
- (a)
- From the beginning of 1986, if it was vegetation in the ith year, and there were at least two years with vegetation cover from ith year to (i + 4)th year, the ith year was defined as the beginning year (T1) of vegetation coverage period.
- (b)
- From the beginning of 2016, if it was vegetation in the ith year, and there were at least two years with vegetation cover from (i − 4)th year to ith year, the ith year was defined as the ending year (T2) of vegetation coverage period.
2.4.2. Detection of the Potential Change Year of Vegetation Types
- (a)
- An intra-annual time series was first reconstructed according to the acquisition time (month/day) of the original NDVI time-series, followed by linear interpolation to construct a continuous intra-annual time-series with a 1-day temporal resolution.
- (b)
- Savitzky-Golay (S-G) filtering was used to smooth the time series to highlight the phenological characteristics of different vegetation types. Because the window size (m) and degree of smoothness (d) are two key parameters for S-G filtering [43], the range of m was set to 38–45 and d was set to 2–3 based on repeated experiments in this study, and optimal fitting parameters (m, d) were determined according to a minimum fitting root mean square error (RMSE) calculated using Equation (2) with all combinations of m and d. The RMSE is given as:where Oi and Si are the observed and fitted values of the time series, respectively, and n is the number of observed values.
- (a)
- The ith observed NDVI value in the 1997–T2 time series was compared with the simulated NDVI corresponding to the month and date of the observed NDVI in the intra-annual time series. The NDVI in this epoch was considered an anomaly flag if the difference between the observed and fitted values was more than three times the RMSE. Conversely, the intra-annual composite was updated dynamically with newly acquired NDVI observations using the method described in section (1).
- (b)
- Vegetation type change occurred for a given pixel if the change direction of the first anomaly flag was consistent with the other anomaly flags within three years, and there were at least three anomalies for different years within a six-year period. The year in which the first anomaly occurred was the potential year (T3) of vegetation type change.
- (c)
- The iterative detection process was terminated if the rules for (a) and (b) were satisfied. Conversely, the (i + 1)th NDVI in the time series was analyzed continuously based on the previous rules. It was believed that vegetation type change had not occurred during the study period if no anomaly flag was revealed in the detection process.
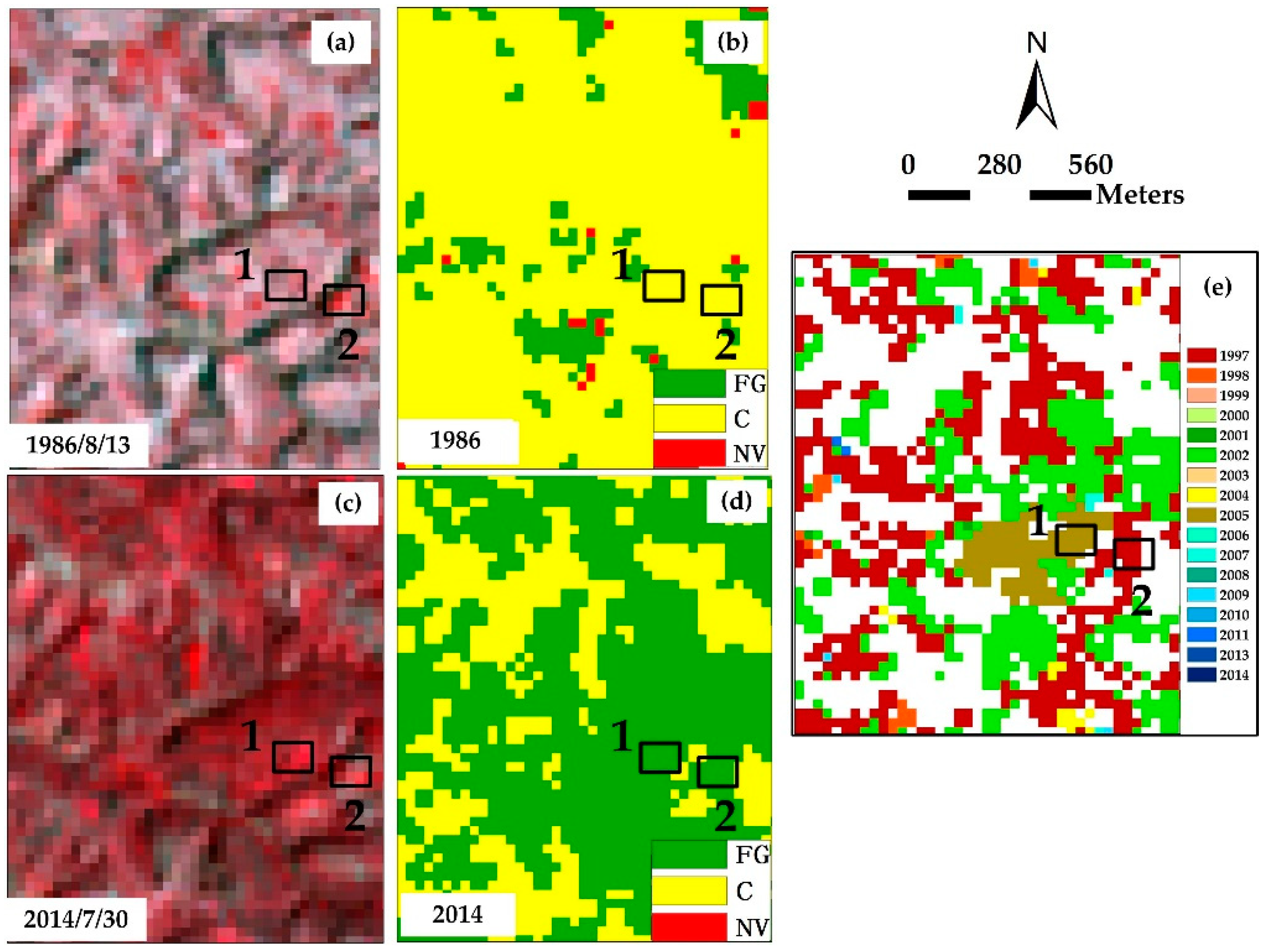
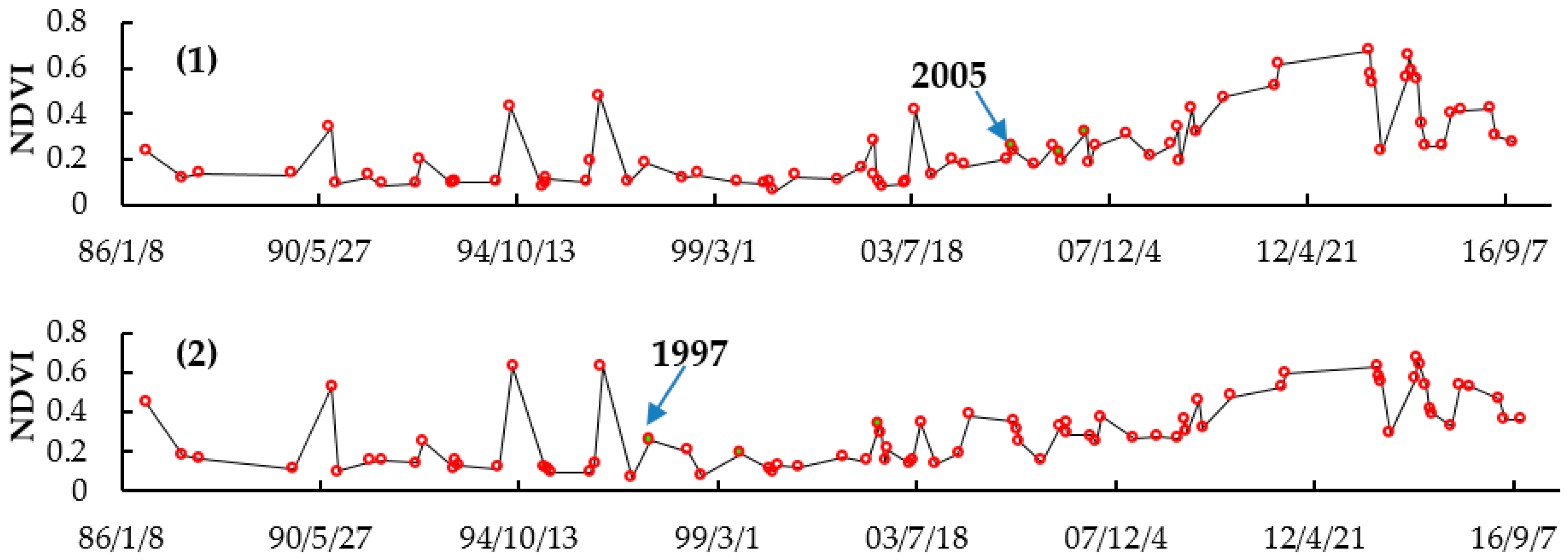
2.4.3. Determination of Change Year and Change Direction for Forest/Grassland and Cropland
2.5. Accuracy Assessment of Contiuous Change Detection Algorithm
3. Results
3.1. Continuous Land Cover Detection Result from 1986 to 2016
3.2. Accuracy Validation of Continuous Change Detection Results
3.2.1. Direct Validation
3.2.2. Indirect Validation
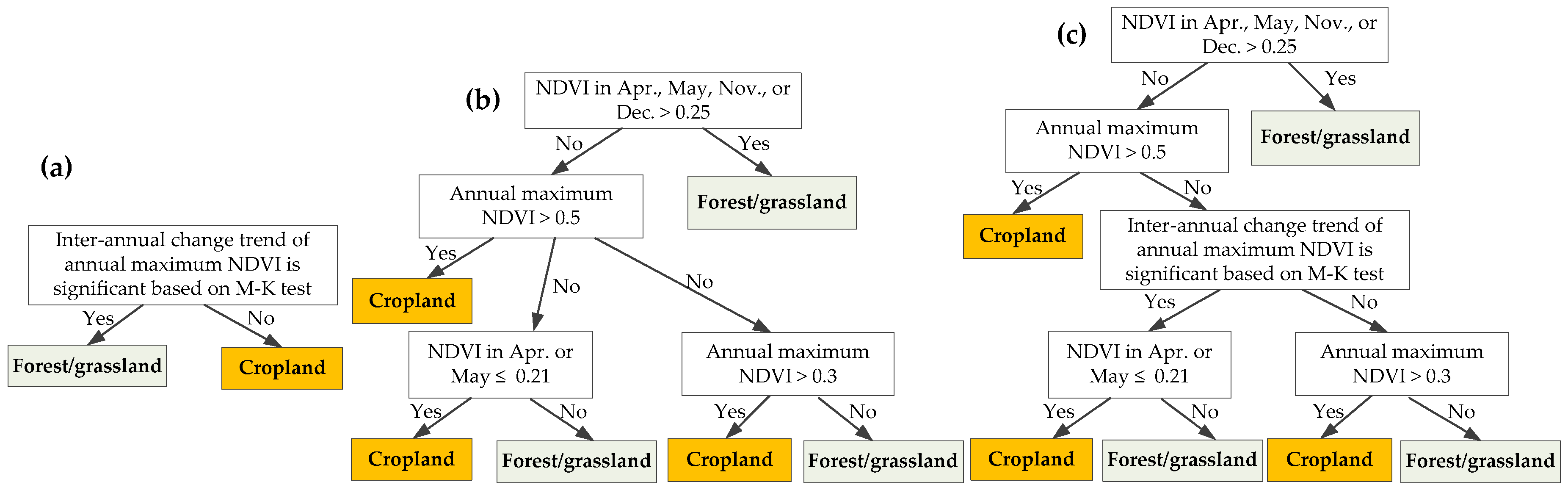
3.3. The Effect of Full Temporal Information on Spatial Detection Accuracy
- (a)
- Decision tree using significance of change trend of annual maximum NDVI from multiple years;
- (b)
- Decision tree using multi-month NDVI from single year;
- (c)
- Decision tree using a combination of decision tree (a) and (b); and
- (d)
- Decision tree using a combination of decision tree (a) and multi-month NDVI from multiple years.
3.4. The Effect of Removing False Detection on Temporal Detection Accuracy
4. Discussion
4.1. Application of Intra-Annual NDVI Time Series Composite Method
4.2. Underlying Mechanism of Determining Classification Metrics and Thresholds
4.3. Source of Detection Error
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, J.G.; Diamond, J. China’s environment in a globalizing world. Nature 2005, 435, 1179–1186. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Peng, C.H.; Li, W.Z.; Tian, L.X.; Zhu, Q.A.; Chen, H.; Fang, X.Q.; Zhang, G.L.; Liu, G.B.; Mu, X.M.; et al. Multiple afforestation programs accelerate the greenness in the ‘Three North’ region of China from 1982 to 2013. Ecol. Indic. 2016, 61, 404–412. [Google Scholar] [CrossRef]
- Wu, Z.T.; Wu, J.J.; Liu, J.H.; He, B.; Lei, T.J.; Wang, Q.F. Increasing terrestrial vegetation activity of ecological restoration program in the Beijing–Tianjin Sand Source Region of China. Ecol. Eng. 2013, 52, 37–50. [Google Scholar] [CrossRef]
- Yin, R.S.; Yin, G.P. China’s primary programs of terrestrial ecosystem restoration: Initiation, implementation, and challenges. Environ. Manag. 2010, 45, 429–441. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Chen, Y.; Cai, W.W.; Dong, W.J.; Xiao, J.F.; Chen, J.Q.; Zhang, H.C.; Xia, J.Z.; Yuan, W.P. The contribution of China’s Grain to Green Program to carbon sequestration. Landsc. Ecol. 2014, 29, 1675–1688. [Google Scholar] [CrossRef]
- Zheng, F.L. Effect of vegetation changes on soil erosion on the Loess Plateau. Pedosphere 2006, 16, 420–427. [Google Scholar] [CrossRef]
- Zhao, A.Z.; Zhang, A.B.; Lu, C.Y.; Wang, D.L.; Wang, H.F.; Liu, H.X. Spatiotemporal variation of vegetation coverage before and after implementation of Grain for Green Program in Loess Plateau, China. Ecol. Eng. 2017, 104, 13–22. [Google Scholar] [CrossRef]
- Luo, Y.; Yang, S.T.; Liu, X.Y.; Liu, C.M.; Song, W.L.; Dong, G.T.; Zhao, H.G.; Lou, H.Z. Land use change in the reach from Hekouzhen to Tongguan of the Yellow River during 1998–2010. Acta Geogr. Sin. 2014, 69, 42–53. (In Chinese) [Google Scholar]
- Wang, S.; Fu, B.J.; Piao, S.L.; Lü, Y.H.; Ciais, P.; Feng, X.M.; Wang, Y.F. Reduced sediment transport in the Yellow River due to anthropogenic changes. Nat. Geosci. 2017, 9, 38–41. [Google Scholar] [CrossRef]
- Liu, X.Y.; Yang, S.T.; Jin, S.Y.; Luo, Y.; Zhou, X. The method to evaluate the sediment reduction from forest and grass land cover large area in the Loss hilly area. J. Hydraul. Eng. 2014, 45, 135–141. (In Chinese) [Google Scholar]
- Liu, X.Y.; Liu, C.M.; Yang, S.T.; Jin, S.Y.; Gao, Y.J.; Gao, Y.F. Influences of shrubs-herbs-arbor vegetation coverage on the runoff based on the remote sensing data in Loess Plateau. Acta Geogr. Sin. 2014, 69, 1595–1603. (In Chinese) [Google Scholar]
- Wang, S.; Fu, B.J.; Liang, W.; Liu, Y.; Wang, Y.F. Driving forces of changes in the water and sediment relationship in the Yellow River. Sci. Total Environ. 2017, 576, 453–461. [Google Scholar] [CrossRef] [PubMed]
- Dissmeyer, G.E.; Foster, G.R. Estimating the cover-management factor (C) in the Universal Soil Loss Equation for forest conditions. J. Soil Water Conserv. 1981, 36, 235–240. [Google Scholar]
- Zhang, H.D.; Zhang, R.H.; Qi, F.; Liu, X.; Niu, Y.; Fan, Z.F.; Zhang, Q.H.; Li, J.Z.; Yuan, L.; Song, Y.Y.; et al. The CSLE model based soil erosion prediction: Comparisons of sampling density and extrapolation method at the county level. Catena 2018, 165, 465–472. [Google Scholar] [CrossRef]
- Karydas, C.G.; Panagos, P. Modelling monthly soil losses and sediment yields in Cyprus. Int. J. Digit. Earth 2016, 9, 766–787. [Google Scholar] [CrossRef]
- Odongo, V.O.; Onyando, J.O.; Mutua, B.M.; Vanoel, P.R.; Becht, R. Sensitivity analysis and calibration of the Modified Universal Soil Loss Equation (MUSLE) for the upper Malewa Catchment, Kenya. Int. J. Sediment Res. 2013, 28, 368–383. [Google Scholar] [CrossRef]
- Phiri, D.; Morgenroth, J. Developments in Landsat Land Cover Classification Methods: A Review. Remote Sens. 2017, 9, 967. [Google Scholar] [CrossRef]
- Liu, L.Y. Opportunities of Mapping Forest Carbon Stock and its Annual Increment Using Landsat Time-Series Data. Geoinform. Geostat. Overv. 2016, 4, 1000151. [Google Scholar] [CrossRef]
- Townshend, J.R.; Masek, J.G.; Huang, C.Q.; Vermote, E.F.; Gao, F.; Channan, S.; Sexton, J.O.; Feng, M.; Narasimhan, R.; Kim, D.; et al. Global characterization and monitoring of forest cover using Landsat data: Opportunities and challenges. Int. J. Digit. Earth 2012, 5, 373–397. [Google Scholar] [CrossRef]
- Toure, S.I.; Stow, D.A.; Shih, H.C.; Weeks, J.; Lopez-Carr, D. Land cover and land use change analysis using multi-spatial resolution data and object-based image analysis. Remote Sens. Environ. 2018, 210, 259–268. [Google Scholar] [CrossRef]
- Wohlfart, C.; Liu, G.H.; Huang, C.; Kuenzer, C. A River Basin over the Course of Time: Multi-Temporal Analyses of Land Surface Dynamics in the Yellow River Basin (China) Based on Medium Resolution Remote Sensing Data. Remote Sens. 2016, 8, 186. [Google Scholar] [CrossRef]
- Huang, C.Q.; Goward, S.N.; Masek, J.G.; Thomas, N.; Zhu, Z.L.; Vogelmann, J.E. An automated approach for reconstructing recent forest disturbance history using dense Landsat time series stacks. Remote Sens. Environ. 2010, 114, 183–198. [Google Scholar] [CrossRef]
- Li, M.S.; Huang, C.Q.; Zhu, Z.L.; Wen, W.S.; Xu, D.; Liu, A.X. Use of remote sensing coupled with a vegetation change tracker model to assess rates of forest change and fragmentation in Mississippi, USA. Int. J. Remote Sens. 2009, 30, 6559–6574. [Google Scholar] [CrossRef]
- Liu, L.; Tang, H.; Caccetta, P.; Lehmann, E.A.; Hu, Y.; Wu, X. Mapping afforestation and deforestation from 1974 to 2012 using Landsat time-series stacks in Yulin District, a key region of the Three-North Shelter region, China. Environ. Monit. Assess. 2013, 185, 9949–9965. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Lu, D.S.; Victoria, D.; Dutra, L.V. Mapping Fractional Cropland Distribution in Mato Grosso, Brazil Using Time Series MODIS Enhanced Vegetation Index and Landsat Thematic Mapper Data. Remote Sens. 2016, 8, 22. [Google Scholar] [CrossRef]
- Neigh, C.S.; Bolton, D.K.; Diabate, M.; Williams, J.J.; Carvalhais, N. An Automated Approach to Map the History of Forest Disturbance from Insect Mortality and Harvest with Landsat Time-Series Data. Remote Sens. 2014, 6, 2782–2808. [Google Scholar] [CrossRef]
- Liu, S.S.; Wei, X.L.; Li, D.Q.; Lu, D.S. Examining Forest Disturbance and Recovery in the Subtropical Forest Region of Zhejiang Province Using Landsat Time-Series Data. Remote Sens. 2017, 9, 479. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Cohen, W.B.; Schroeder, T.A. Trajectory-based change detection for automated characterization of forest disturbance dynamics. Remote Sens. Environ. 2007, 110, 370–386. [Google Scholar] [CrossRef]
- Healey, S.P.; Cohen, W.B.; Yang, Z.Q.; Krankina, O.N. Comparison of Tasseled Cap-based Landsat data structures for use in forest disturbance detection. Remote Sens. Environ. 2005, 97, 301–310. [Google Scholar] [CrossRef]
- Beurs, K.M.D.; Owsley, B.C.; Julian, J.P. Disturbance analyses of forests and grasslands with MODIS and Landsat in New Zealand. Int. J. Appl. Earth Obs. 2016, 45, 42–54. [Google Scholar] [CrossRef]
- Hamunyela, E.; Reiche, J.; Verbesselt, J.; Herold, M. Using Space-Time Features to Improve Detection of Forest Disturbances from Landsat Time Series. Remote Sens. 2017, 9, 515. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.H.; Woodcock, C.E. Improvement and Expansion of the Fmask Algorithm: Cloud, Cloud Shadow, and Snow Detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, L.Y.; Liu, L.L.; Peng, D.L.; Jiao, Q.J.; Zhao, H. A Landsat-5 Atmospheric Correction Based on MODIS Atmosphere Products and 6S Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1609–1615. [Google Scholar] [CrossRef]
- Berk, A.; Bernstein, L.S.; Anderson, G.P.; Acharya, P.K.; Robertson, D.C. MODTRAN cloud and multiple scattering upgrades with application to AVIRIS. Remote Sens. Environ. 1998, 65, 367–375. [Google Scholar] [CrossRef]
- Teillet, P.M.; Guindon, B.; Goodenough, D.G. On the slope-aspect correction of multispectral scanner data. Can. J. Remote Sens. 1982, 8, 84–106. [Google Scholar] [CrossRef]
- He, Y.Q.; Lee, E.; Warner, T.A. A time series of annual land use and land cover maps of China from 1982 to 2013 generated using AVHRR GIMMS NDVI3g data. Remote Sens. Environ. 2017, 199, 201–217. [Google Scholar] [CrossRef]
- Xiao, Z.Q.; Liang, S.L.; Sun, R.; Wang, J.D.; Jiang, B. Estimating the fraction of absorbed photosynthetically active radiation from the MODIS data based GLASS leaf area index product. Remote Sens. Environ. 2015, 171, 105–117. [Google Scholar] [CrossRef]
- Zhang, W.Q.; Chen, J.; Liao, A.P.; Han, G.; Chen, X.H.; Chen, L.J.; Peng, S. Geospatial knowledge-based verification and improvement of GlobeLand30. Sci. China Earth Sci. 2016, 59, 1–11. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Cheng, W.C.; Chang, J.C.; Chang, C.P.; Su, Y.; Tu, T.M. A Fixed-Threshold Approach to Generate High-Resolution Vegetation Maps for IKONOS Imagery. Sensors 2008, 8, 4308–4317. [Google Scholar] [CrossRef] [PubMed]
- Han, N.; Wu, J.; Tahmassebia, A.R.S.; Xu, H.W.; Wang, K. NDVI-Based Lacunarity Texture for Improving Identification of Torreya Using Object-Oriented Method. Agric. Sci. China 2011, 10, 1431–1444. [Google Scholar] [CrossRef]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Liu, Y.L.; Wang, Q.; Bi, J.Z.; Zhang, M.M.; Xing, Q.G.; Shi, P. The analysis of NDVI trends in the coastal zone based on Mann-Kendall test: A case in the Jiaodong Peninsula. Acta Geogr. Sin. 2010, 32, 79–87. (In Chinese) [Google Scholar]
- Lewis, H.G.; Brown, M. A generalized confusion matrix for assessing area estimates from remotely sensed data. Int. J. Remote Sens. 2001, 22, 3223–3235. [Google Scholar] [CrossRef]
- Baraldi, A.; Puzzolo, V.; Blonda, P.; Bruzzone, L.; Tarantino, C. Automatic Spectral Rule-Based Preliminary Mapping of Calibrated Landsat TM and ETM+ Images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2563–2586. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Types | Number of Pixels | Prior Knowledge for Sample Selection | |||
|---|---|---|---|---|---|
| Training | Validation | Total | Change Time | ||
| FG | 596 | 398 | 994 | Trees, shrub, grass, sparse vegetation | |
| C | 1440 | 960 | 2400 | Sloped cropland, terraced field, gully, and irrigable land near the riparian area | |
| NV | 348 | 232 | 580 | Bare land, building land, water | |
| C-FG | 1917 | 1278 | 3195 | 109 | Returning cropland to forests and grassland, abandoned land |
| C-NV | 342 | 228 | 570 | 53 | Infrastructure construction |
| FG-C | 222 | 148 | 370 | 32 | Land near riparian areas where saplings are replaced by crops |
| FG-NV | 302 | 201 | 503 | 96 | Infrastructure construction |
| NV-C | 92 | 61 | 153 | 84 | Gully or check-dam-induced land |
| NV-FG | 620 | 413 | 1033 | 115 | Afforestation and grazing prohibition |
| Total | 5879 | 3919 | 9798 | 489 | |
| Unchanged | Changed | UA (%) | UA (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Class | FG | C | NV | C-FG | C-NV | FG-C | FG-NV | NV-C | NV-FC | |||
| Unchanged | FG | 329 | 36 | 0 | 31 | 0 | 10 | 5 | 0 | 8 | 78.5 | 92.1 |
| C | 30 | 854 | 0 | 43 | 0 | 27 | 2 | 0 | 0 | 89.3 | ||
| NV | 2 | 0 | 232 | 0 | 0 | 0 | 0 | 0 | 0 | 99.1 | ||
| Changed | C-FG | 27 | 64 | 0 | 1158 | 0 | 16 | 0 | 0 | 0 | 91.5 | 95.3 |
| C-NV | 1 | 0 | 0 | 0 | 201 | 0 | 29 | 0 | 0 | 87.0 | ||
| FG-C | 8 | 5 | 0 | 46 | 0 | 95 | 0 | 7 | 0 | 59.0 | ||
| FG-NV | 0 | 0 | 0 | 0 | 27 | 0 | 165 | 0 | 0 | 85.9 | ||
| NV-C | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 52 | 4 | 91.2 | ||
| NV- FG | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 401 | 99.3 | ||
| PA (%) | 82.7 | 89.0 | 100.0 | 90.6 | 88.2 | 64.2 | 82.1 | 85.2 | 97.1 | |||
| PA (%) | 93.2 | 94.5 | ||||||||||
| 9 classes for changed and stable land cover classes: Overall accuracy = 88.9% ± 1.0%, Kappa = 0.86 | ||||||||||||
| 2 classes for changed and unchanged classes: Overall accuracy = 94.0% ± 0.0%, Kappa = 0.88 | ||||||||||||
| Same Year | ≤1 Year | ≤2 Year | ≤3 Year | |
|---|---|---|---|---|
| Number of pixels | 43 | 165 | 179 | 67 |
| Proportion (%) | 9.4 | 36.3 | 39.5 | 14.8 |
| Year | Area Proportion (%) of Each Land Cover Type in the Study Area | |||||
|---|---|---|---|---|---|---|
| Classification in This Study | GlobeLand30 | |||||
| C | FG | NV | C | FG | NV | |
| 2000 | 37.1 | 47.2 | 15.7 | 42.4 | 53.9 | 3.7 |
| 2010 | 26.1 | 71.8 | 2.1 | 42.1 | 54.1 | 3.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Yao, W.; Tang, Q.; Liu, L.; Xiao, P.; Kong, X.; Zhang, P.; Shi, F.; Wang, Y. Continuous Change Detection of Forest/Grassland and Cropland in the Loess Plateau of China Using All Available Landsat Data. Remote Sens. 2018, 10, 1775. https://doi.org/10.3390/rs10111775
Wang Z, Yao W, Tang Q, Liu L, Xiao P, Kong X, Zhang P, Shi F, Wang Y. Continuous Change Detection of Forest/Grassland and Cropland in the Loess Plateau of China Using All Available Landsat Data. Remote Sensing. 2018; 10(11):1775. https://doi.org/10.3390/rs10111775
Chicago/Turabian StyleWang, Zhihui, Wenyi Yao, Qiuhong Tang, Liangyun Liu, Peiqing Xiao, Xiangbing Kong, Pan Zhang, Fangxin Shi, and Yuanjian Wang. 2018. "Continuous Change Detection of Forest/Grassland and Cropland in the Loess Plateau of China Using All Available Landsat Data" Remote Sensing 10, no. 11: 1775. https://doi.org/10.3390/rs10111775
APA StyleWang, Z., Yao, W., Tang, Q., Liu, L., Xiao, P., Kong, X., Zhang, P., Shi, F., & Wang, Y. (2018). Continuous Change Detection of Forest/Grassland and Cropland in the Loess Plateau of China Using All Available Landsat Data. Remote Sensing, 10(11), 1775. https://doi.org/10.3390/rs10111775