Potential and Limitations of Open Satellite Data for Flood Mapping

 ,
,  ,
,  ,
,  , and
, and 
Abstract
1. Introduction
2. Description of the Study Areas
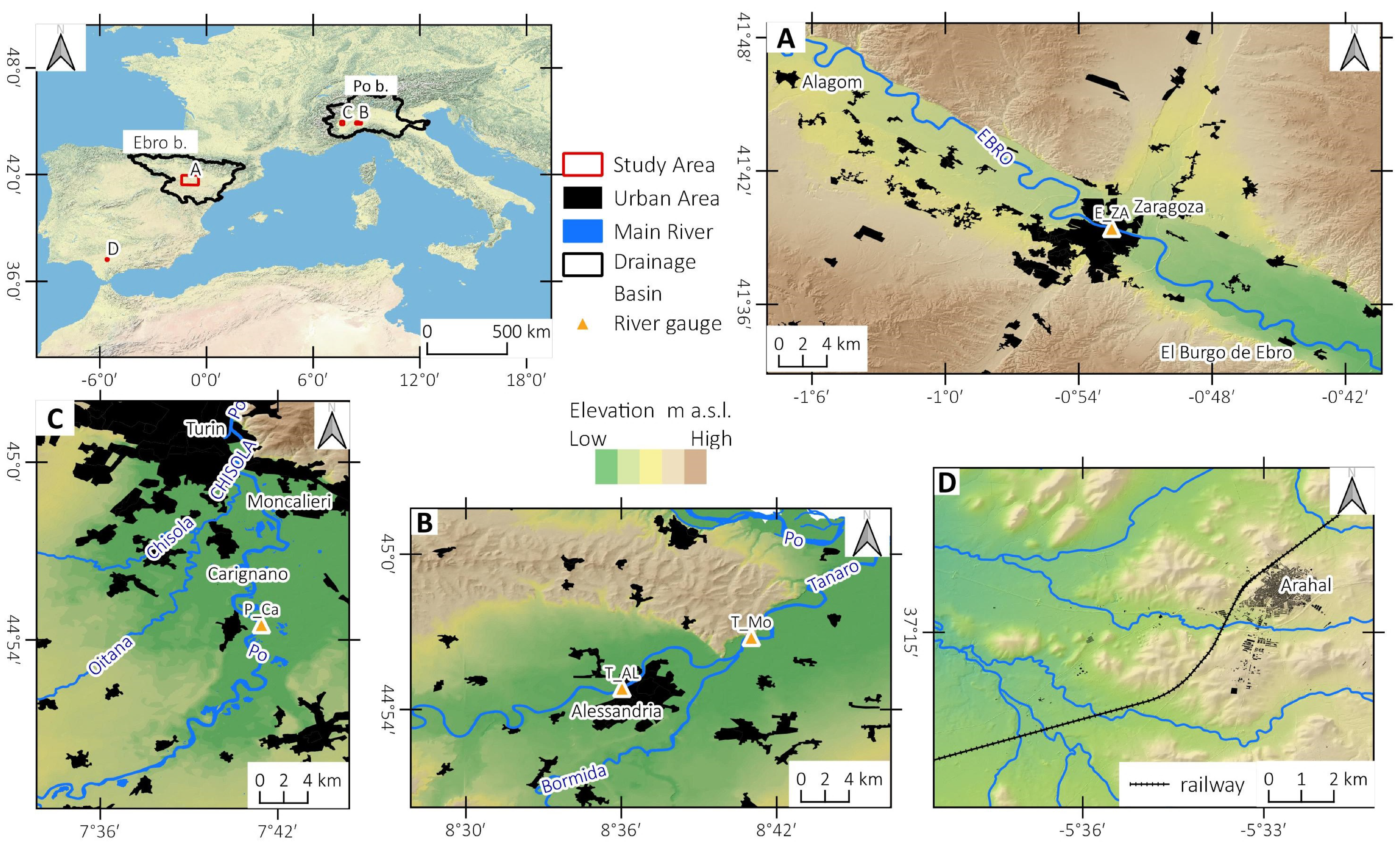
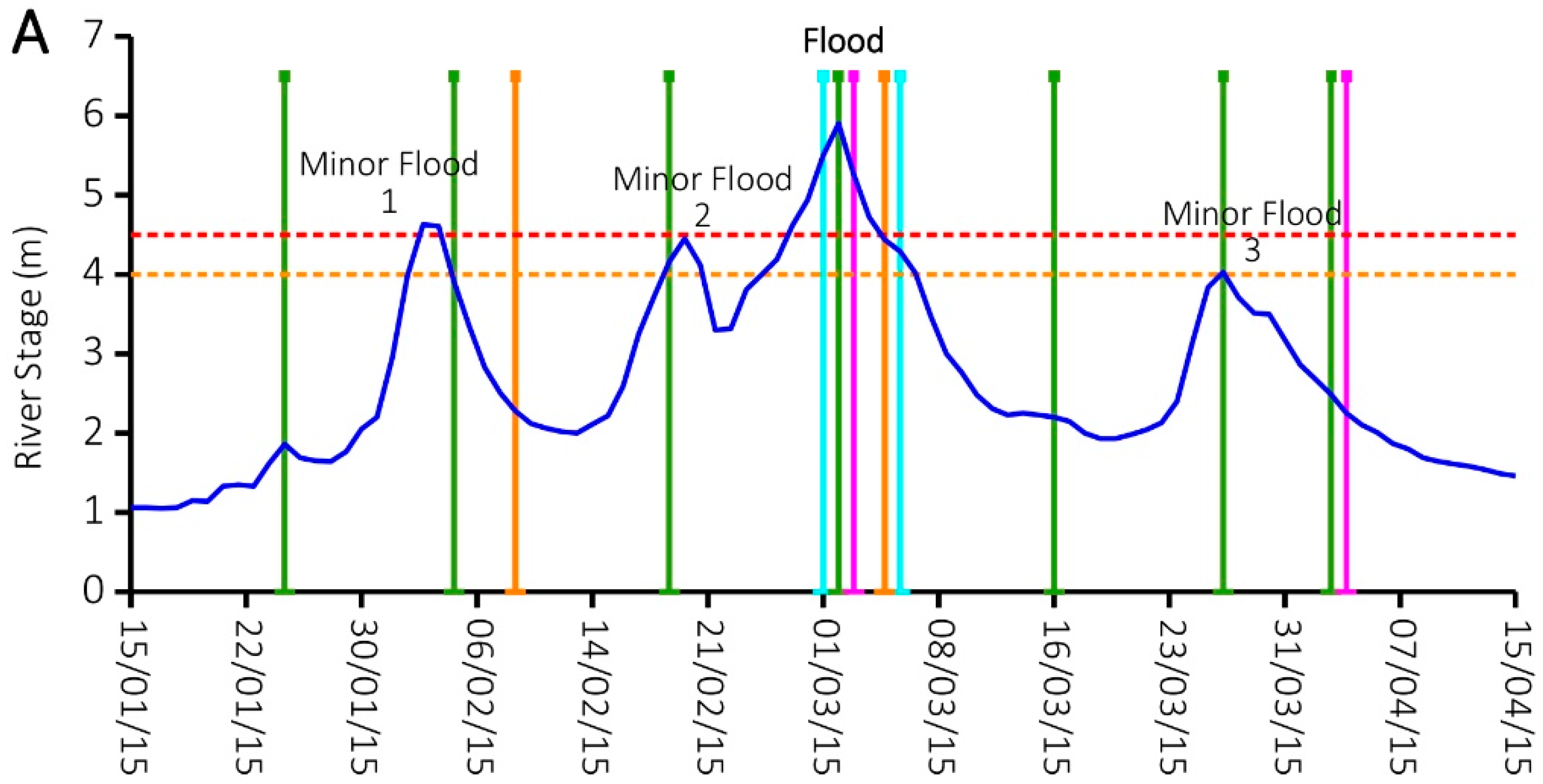
2.1. February–March 2015 Flood in Ebro Valley (Spain)
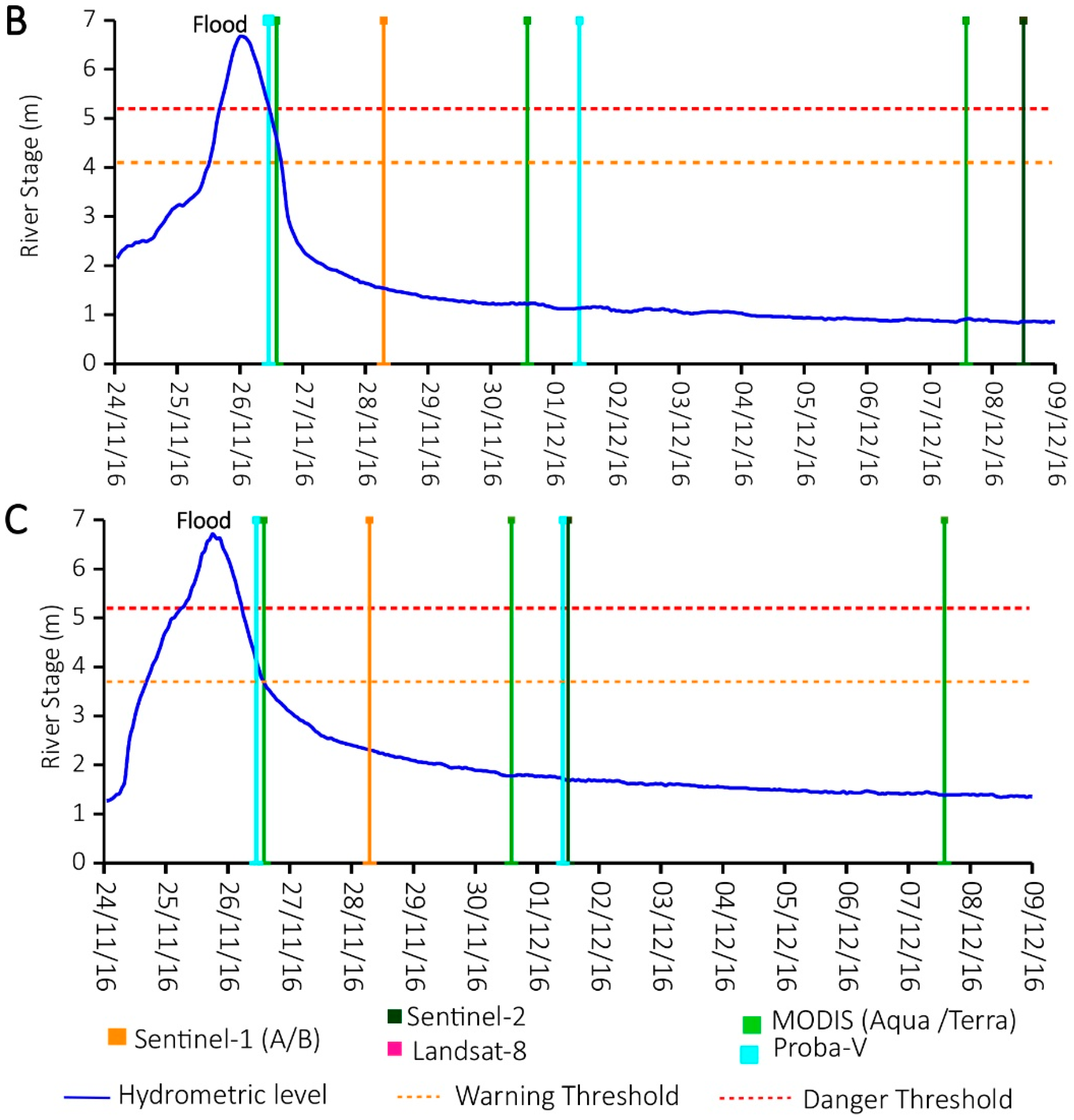
2.2. November 2016 Flood in Western Po River Basin (Italy)
2.3. November 2017 Small Flash Flood Near Sevilla (Spain)
3. Materials and Methods
3.1. SAR Data
3.2. Multispectral Data
3.2.1. Medium-Low Resolution Multispectral Data
3.2.2. Medium-High Resolution Multispectral Data
3.3. Data Processing, Analysis and Validation
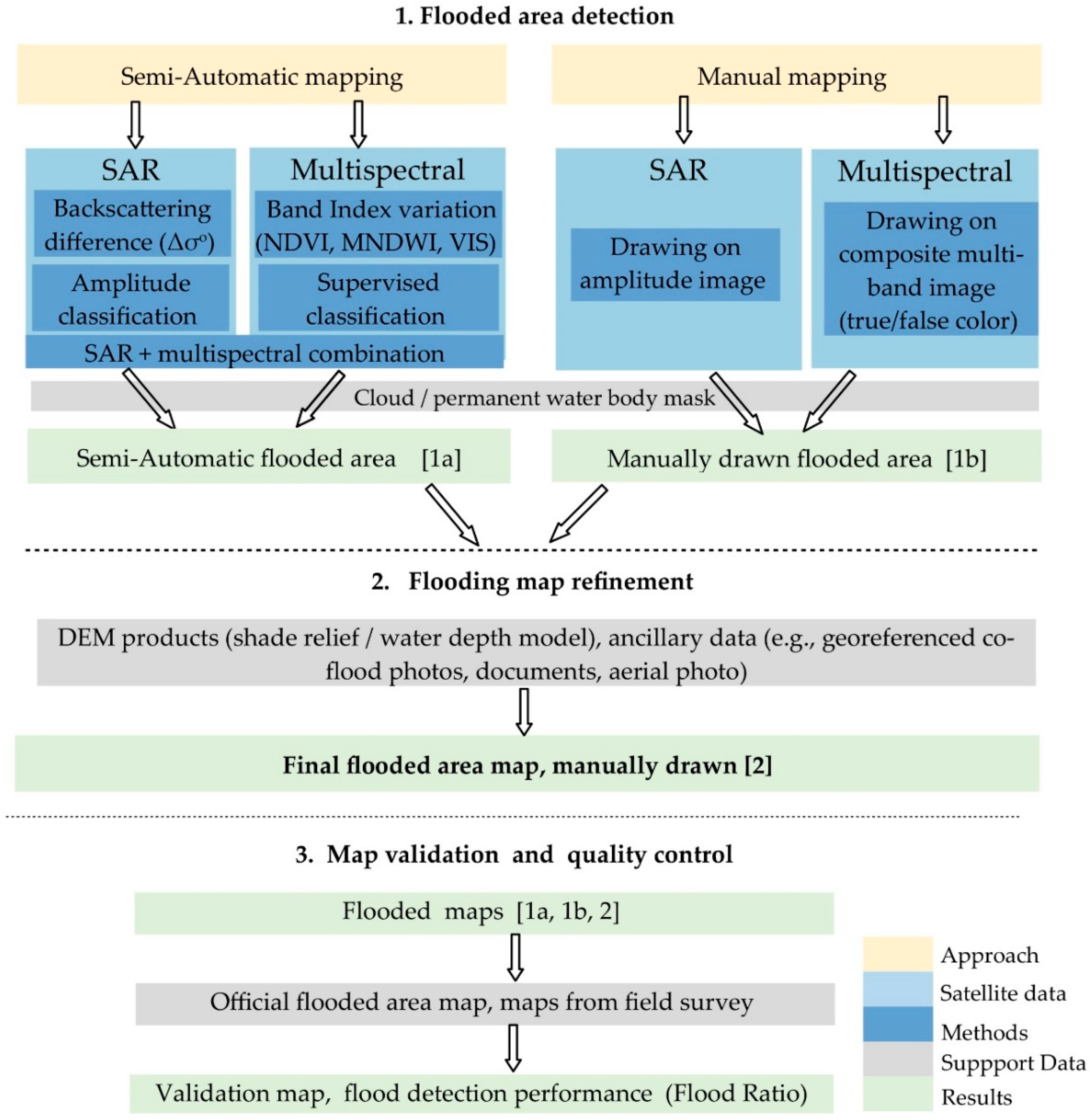
- The first step is the detection of the flooded area, which can be performed using a manual or a semi-automatic mapping approach:
- The manual mapping consists of the direct visual interpretation of the images (SAR amplitude or color combinations of multispectral bands). In this case, the flooded areas were drawn manually directly on the georeferenced satellite images in QGIS software.
- With the semi-automatic approach, we initially produced an automatic flooded area map in raster format. The map is extracted from SAR or multispectral satellite data using different methodologies such as band index, supervised classification or backscattering difference. In this step, we used an empirical threshold to detect flooded areas; for this reason, it is not a fully automatic approach.
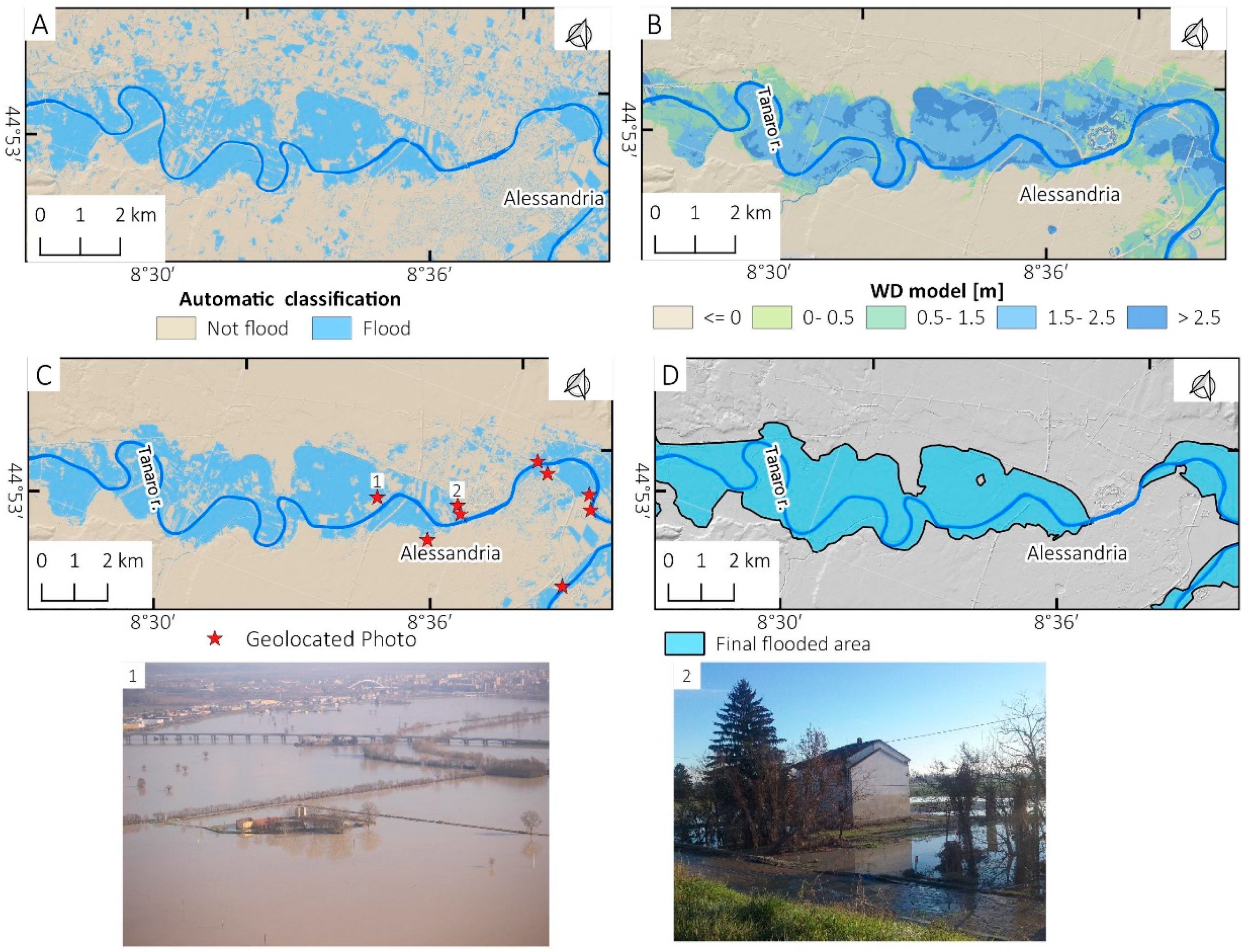
- A possible improvement of manual and automatic detection could be made using a cloud mask and permanent water body (from ancillary data or pre-flood images). The second step is map improvement and refinement. In this step, we also consider additional information such as (a) water depth model derived from DEM, (b) hillshade and aerial photos to detect the geomorphological features, and (c) ancillary data such as georeferenced photos or documents found on the web to have ground information about the flooded area extent. These data allow the creation of an improved final version of flooded area maps, manually drawn, both for the semi-automatic and manual approaches.
- The third step is the flood map validation. This step is performed only when official flood maps or field survey maps are available. We used these maps to evaluate the quality of the flooded area maps and in particular the performance of semi-automatic mapping (flood ratio and not flood ratio).
3.3.1. Manual Mapping
3.3.2. Semi-Automatic Mapping Based on SAR Data Processing
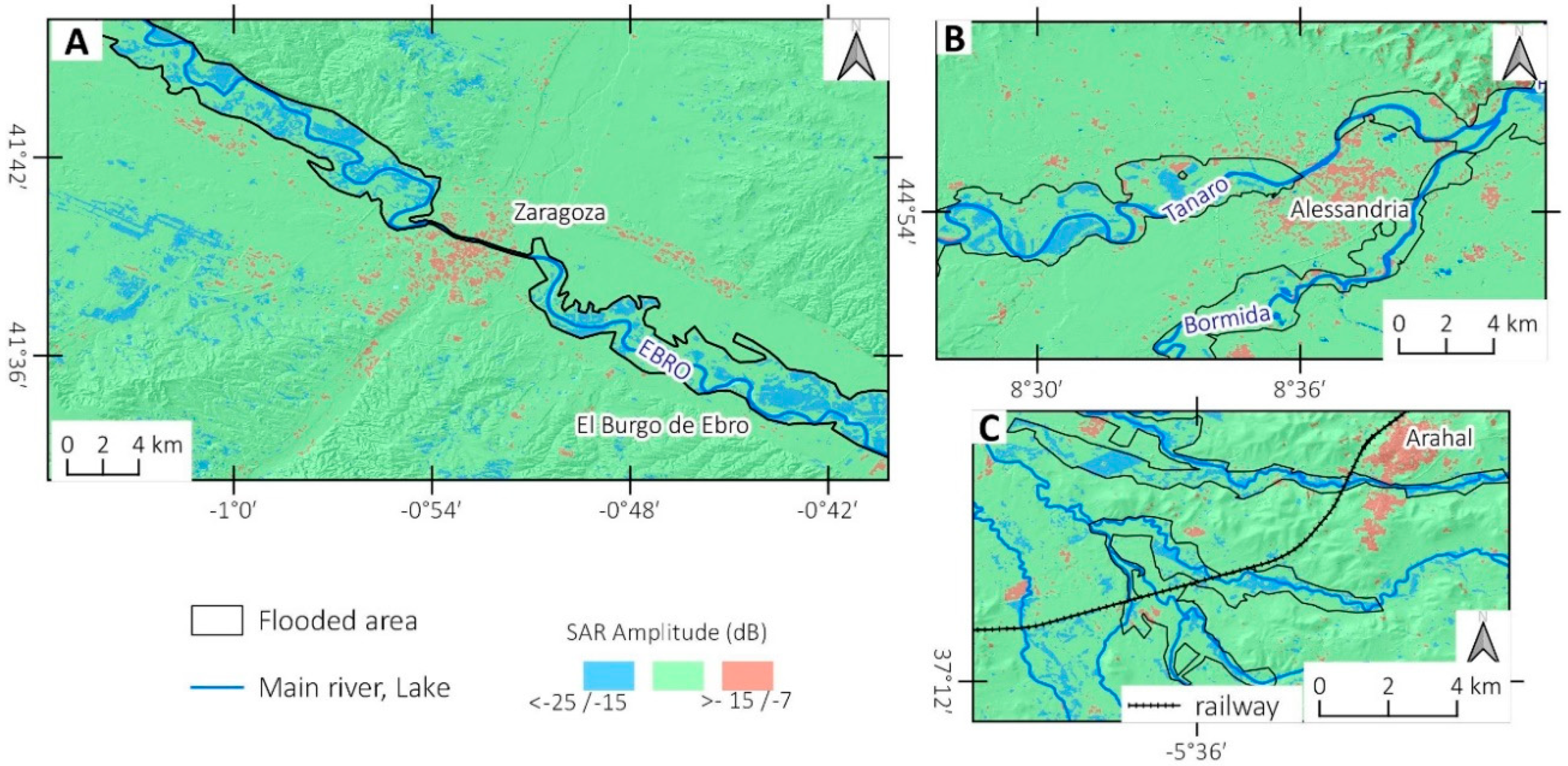
- SAR Amplitude classification (SAR_AC). The calibrated SAR (amplitude) image was classified to identify the water-covered area according to the criterion that soil covered by a quiet water table shows low amplitude and can be easily extracted from the image. We applied the classification to Sentinel-1 SLC for the Zaragoza, Po basin and Arahal areas. We also implemented a simple filter, available in the processing raster tool of QGIS software, to smooth local noise effects. Using empirical thresholds based on a visual approach, we classified the SAR data into three classes: (a) Low values of sigma naught (σ°) (< −25/−20 dB), i.e., water-covered areas (lakes or flooded areas), flat surface or shadow; (b) middle values (−20/−10 dB), i.e., cultivated land or natural vegetation; and (c) high values (> −12 dB), i.e., dense urban or forested areas or area with bare rocks. We used optical images to validate the accuracy of classification qualitatively. During the refinement step, the operator can separate the flooded area from another type of low-dB area with the help of ancillary data (e.g., permanent water body mask or optical images).
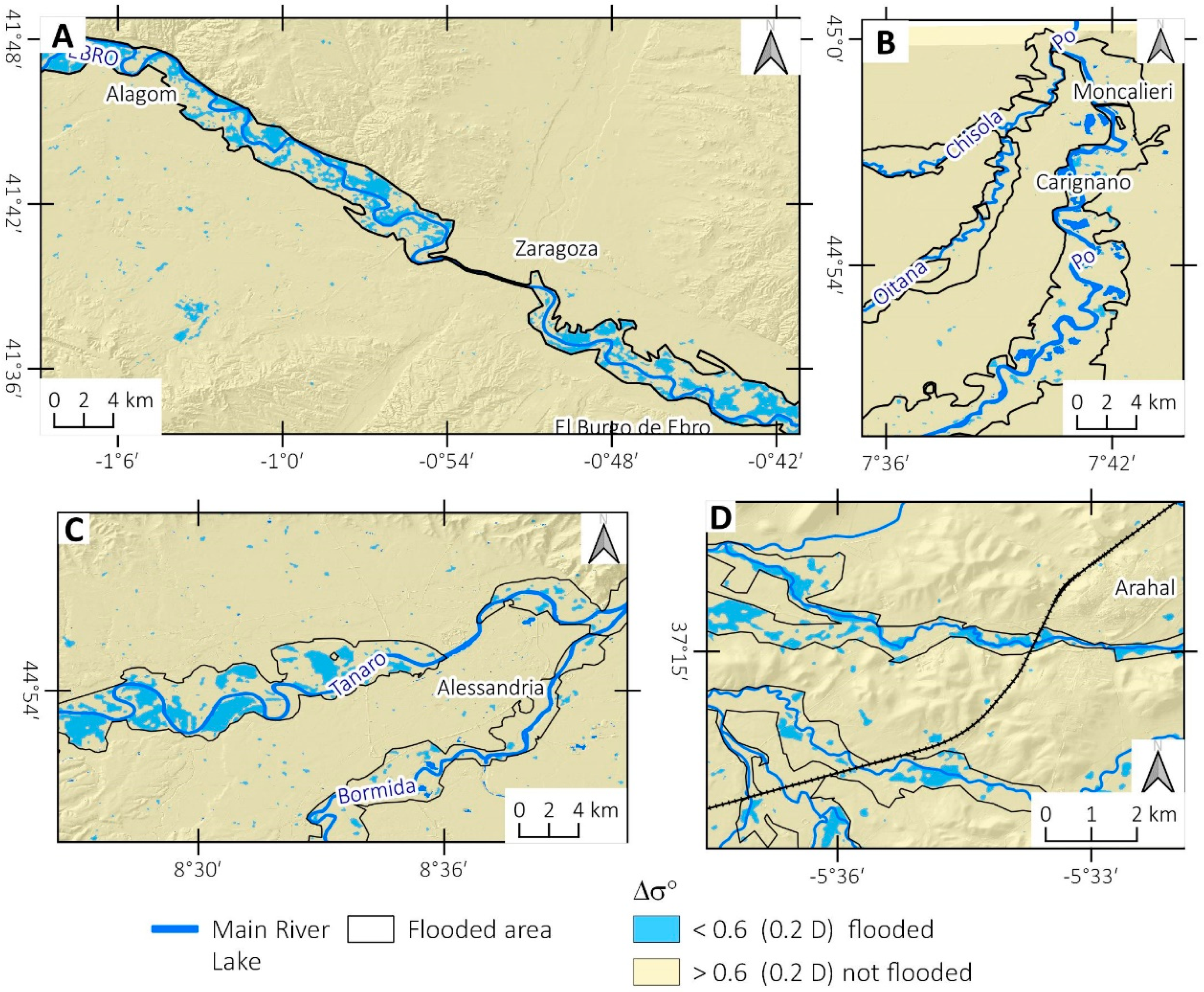
- Backscattering variation (Δσo). Two SAR images (one post-/co-flood and one pre-flood) were used for change detection analyses. SAR data, acquired in the SLC format, were radiometrically calibrated [66] to obtain the relevant σo maps, i.e., the surface backscattering maps. Calibrated SAR data were averaged through a multi-look operation, with one look in the azimuth direction and four looks in the range one, accurately co-registered [73] and, finally, geocoded [74]. Surface changes due to flooding were detected by calculating the log ratio between the post- and the pre-flood images. Thus, the Δσo map showing the temporal variation of surface backscattering from the pre- to the post-flooding phase was produced. For the classification of such a map, we applied an empirical threshold of the Δσo value that allows identifying as many flooded areas as possible and minimizes false detection errors.
3.3.3. Semi-Automatic Mapping Based on Multispectral Image Processing
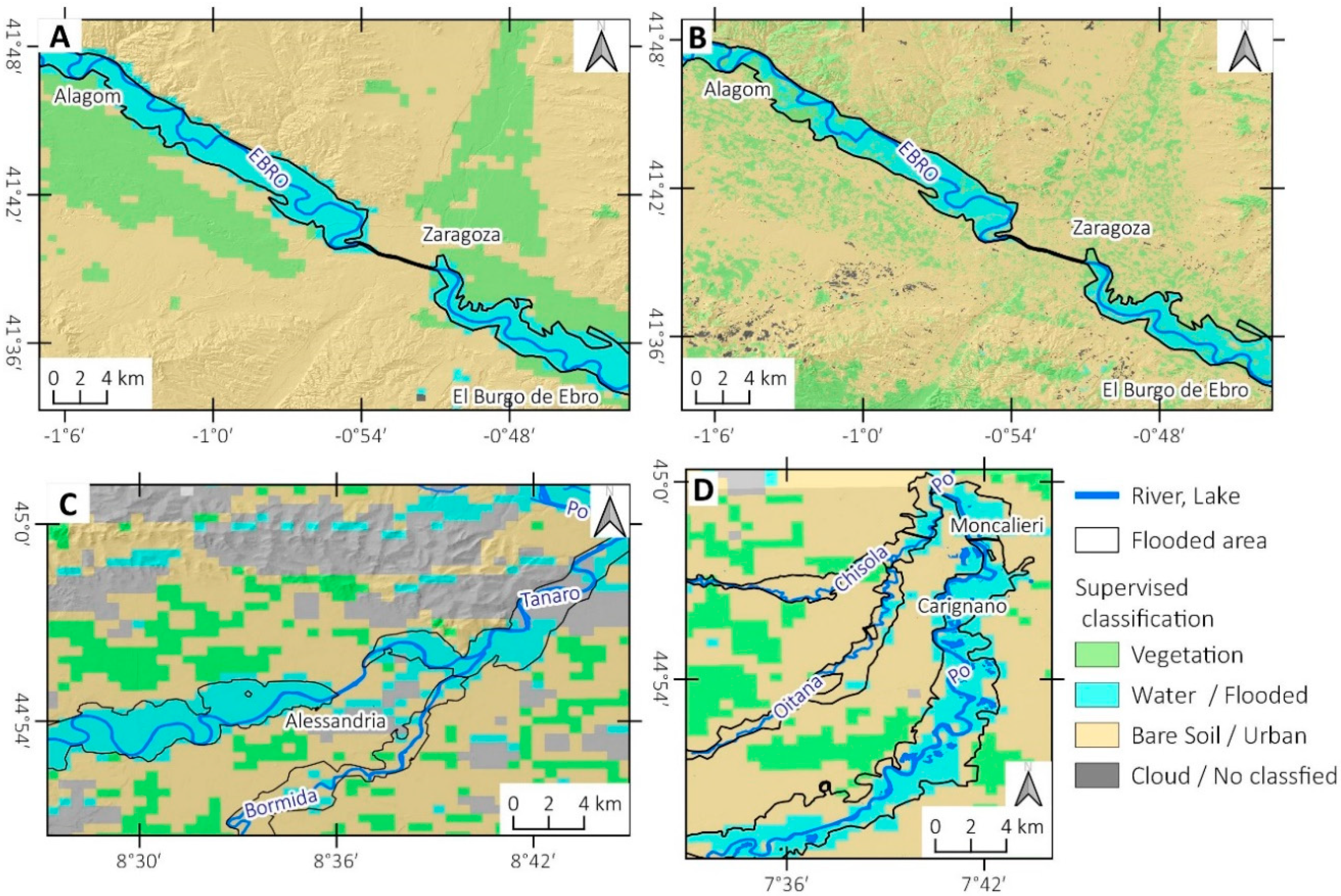
- Supervised classification (SC). We applied this technique to classify MODIS and Landsat-8 co-flood data. We initially detected the most representative land-cover types (i.e., water-covered area, vegetation, cloud, snow, and urban area/bare soil) in training areas selected over a composite band image on QGIS to create a spectral signature with the available bands. Then, we performed a supervised classification of the images using the SAGA-GIS. Specifically, we tested different classification methods and selected the maximum likelihood and spectral angle methods as the most appropriate for our study. Finally, using a raster query in QGIS, we extracted the “area covered by water or wetland” category. In this case, the use of a permanent water body mask also allowed us to separate the flooded area from the permanent rivers and lakes.
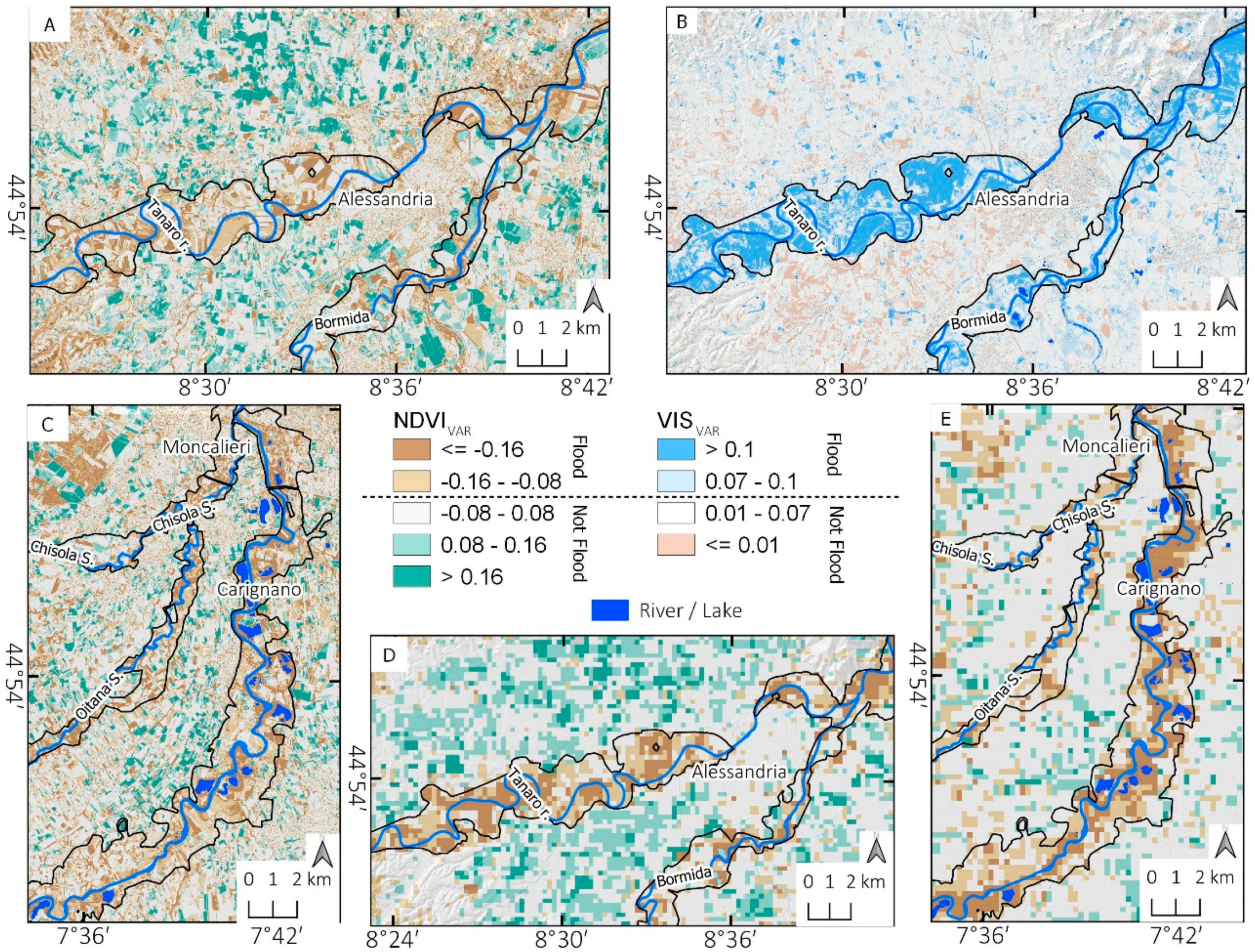
- Normalized Difference Vegetation Index variation (NDVIvar). We calculated the NDVI variation between the pre- and post-flood conditions (Equation (1)). The aim is to identify areas characterized by a decrease in NDVI values due to vegetation activity decreasing (area covered by sediments or damaged vegetation) or the presence of water covering the area [75,76]. We computed NDVI using the NIR and the red band of Sentinel-2 (10 m of spatial resolution), Landsat 8 (30 m of S.R.), Proba-V (100 m of S.R.) and MODIS data (250 m of S.R.):Modified Normalized Difference Water Index variation (MNDWIvar) and Normalized Difference Moisture Index variation (NDMIvar). These indexes allow the detection of water bodies or wetlands and were widely used to map flooded areas [77]. In the literature, different combinations for calculating MNDWI are presented and discussed [78,79,80].
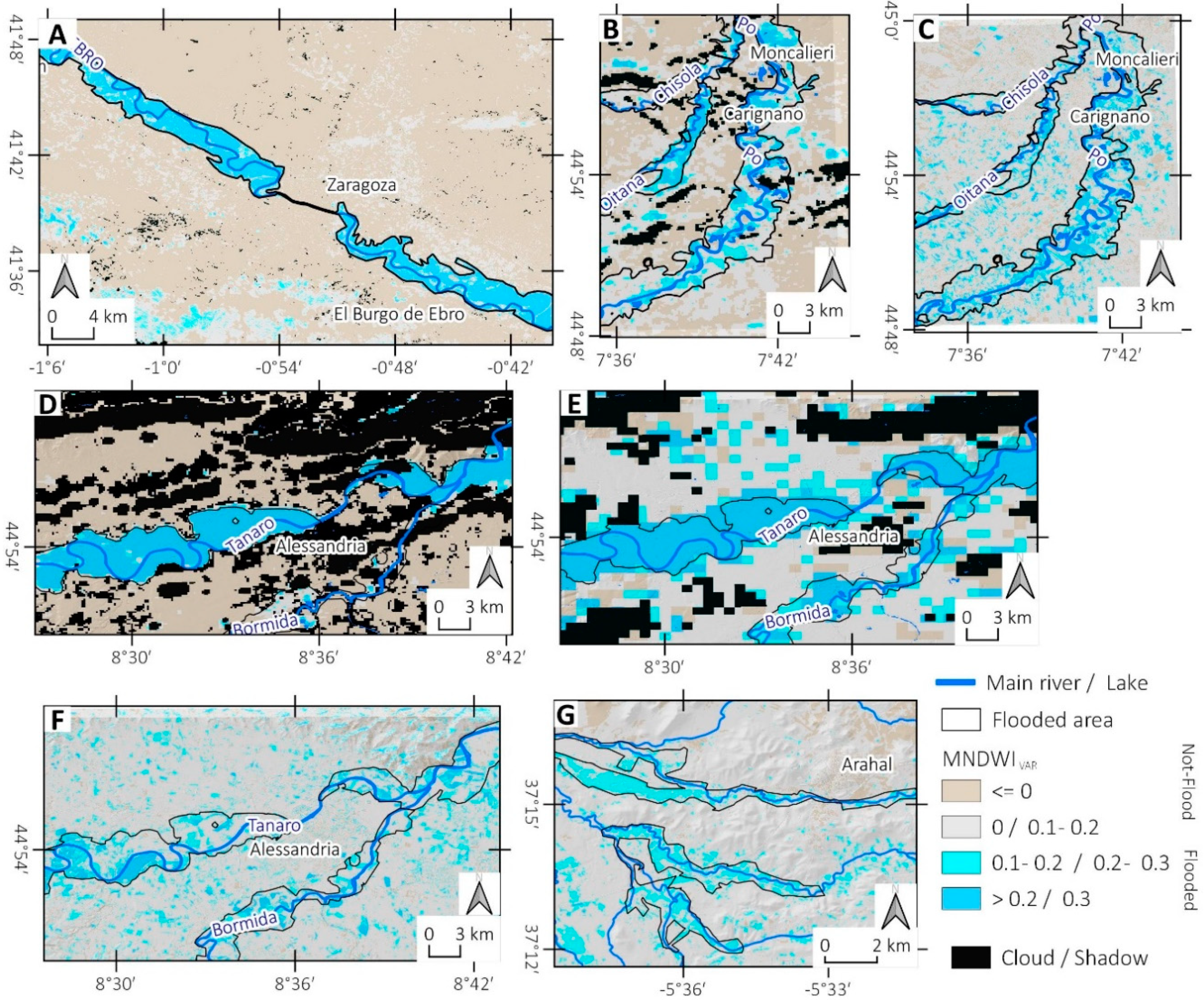
- In our study, we used the Red Edge band—Short Wavelength Infrared bands (Equation (2a)) for Sentinel-2 data (20 m of S.R.), and the Red and SWIR bands for Landsat-8 (30 m of S.R.), MODIS (500 m of S. R.) and Proba-V data. In a pre-flood situation, these bands better supported noticing changes in soil moisture/water covered areas. The NDMI [81] is calculated by exploiting the NIR and SWIR bands and was used for the Arahal area (Equation (3)).whereor
- Variation of averaged visible bands (VISvar). This index allows the detection of the reflectance variation induced by the presence of silt deposits on crop fields. The index is based on the averaging of the RGB bands (Equation (4)). We derived this index from the Sentinel-2 data (S.R. 10 m) acquired over the Tanaro and Po areas, allowing noting of the sediment deposits and mapping the flooded areas indirectly.
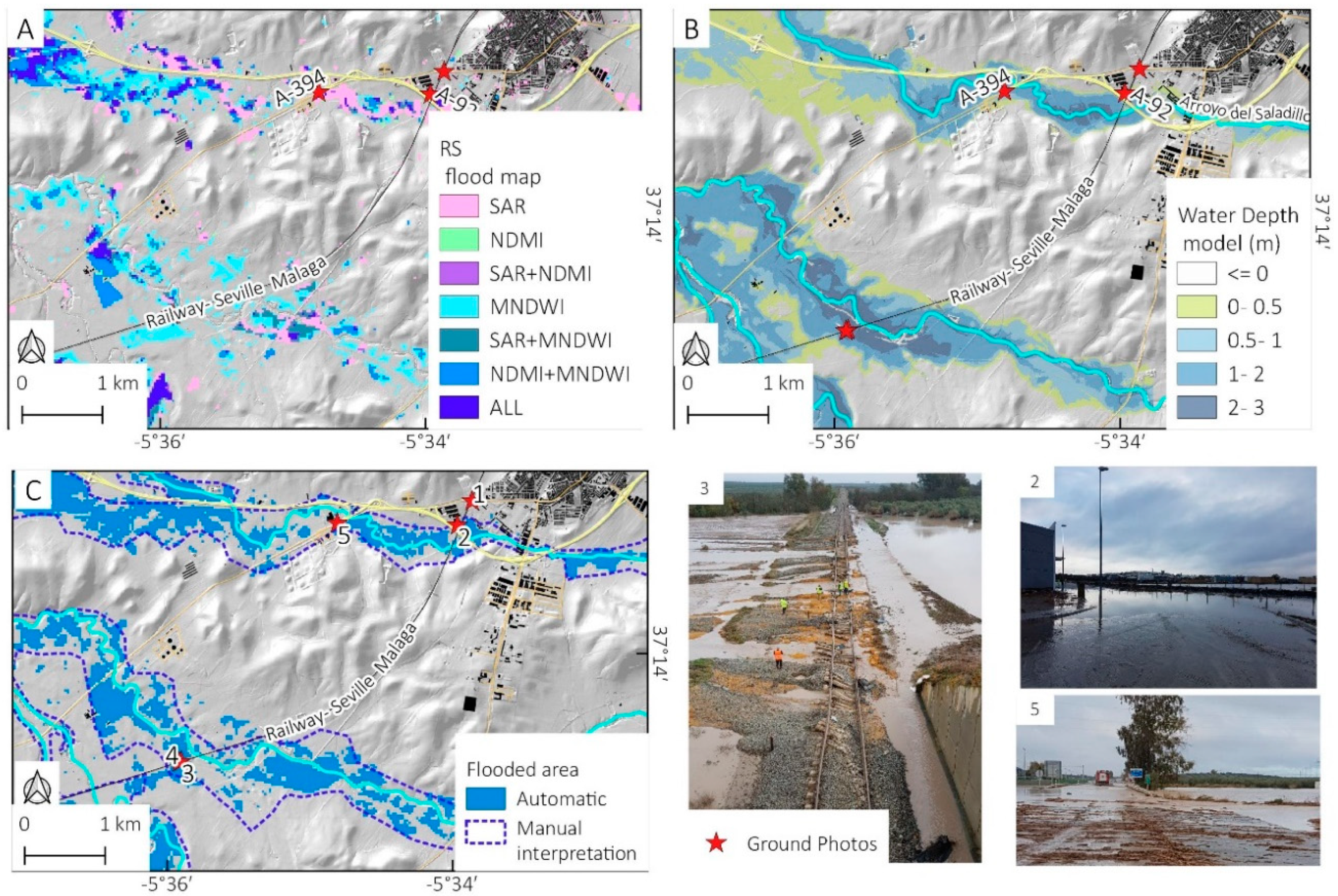
- SAR-Optical combination: The extraction of the flooded area for the Arahal case study was also obtained by integrating the processed SAR (Sentinel-1) and multispectral (Sentinel-2 and Landsat-8) data. Specifically, we created a Boolean raster map based on the relationship AND/OR between SAR- and optical-based flood maps.
3.4. Improvement and Refinement of Flood Maps
3.4.1. DEM Support: Water Depth Model and Shaded Relief
3.4.2. Ancillary Ground Truth Data
3.5. Flood Map Validation and Quality Statistics
- (a)
- Both the produced flooded area maps and the official reference maps were converted into a Boolean raster format (1—flooded or 0—not flooded)
- (b)
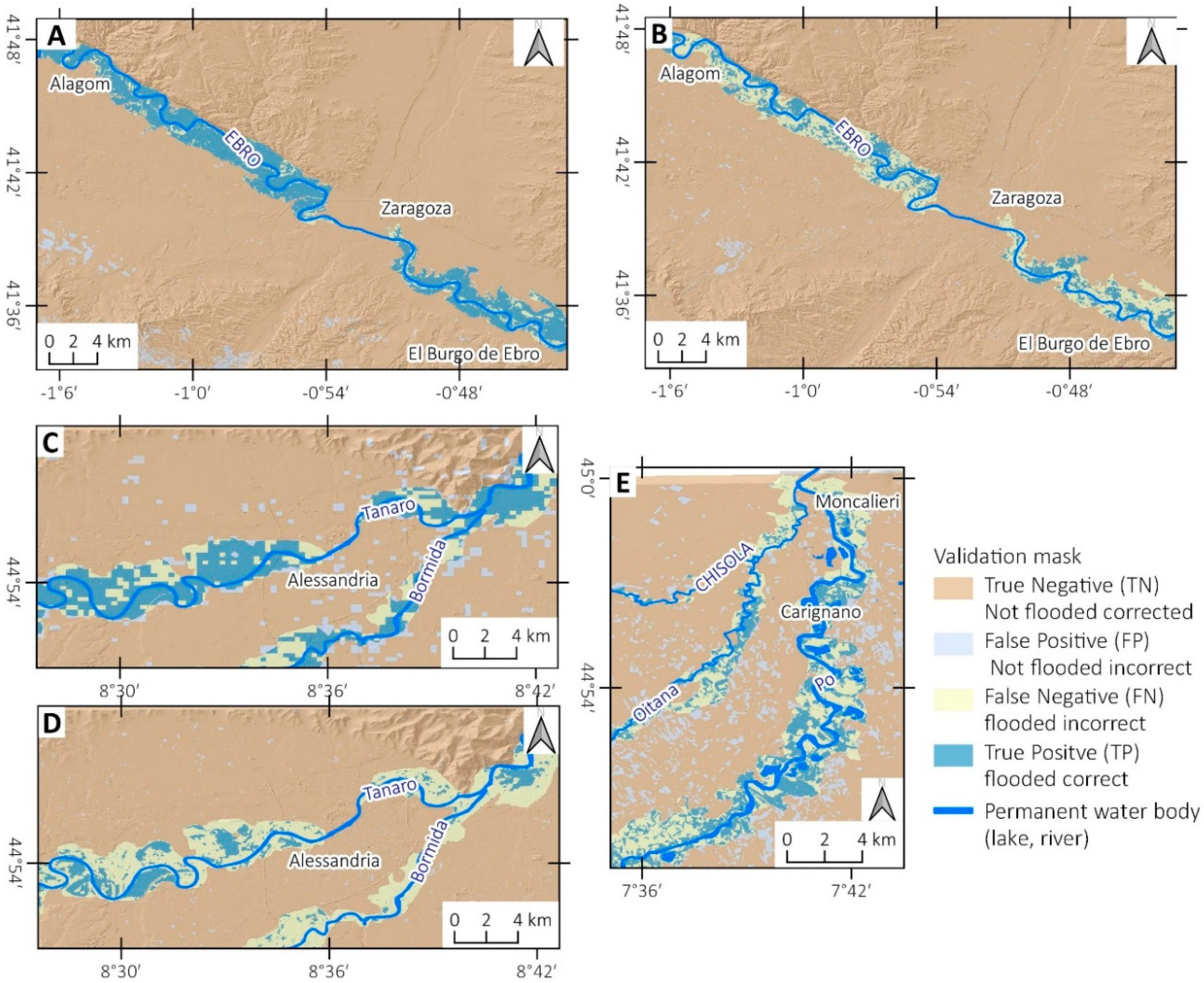
- The two rasters were crossed, and a raster map with four possible values was generated: True positive (TP), true negative (TN), false negative (FN), false positive (FP). TP corresponds to areas correctly classified as flooded, TN are the areas correctly classified as not flooded, FN indicates the undetected flooded areas, and FP are the not-flooded areas erroneously classified as inundated. To make a more-uniform comparison between different types of semi-automatic flood detection approaches, it is possible to use a permanent water mask to exclude river and lake areas from FR statistics.
- (c)
- We evaluated the efficacy of used datasets and methods by computing the flood-mapping ratio (Equation (5)) and the not-flood ratio (Equation (6)) represented as a percentage format.FR (%) = TP/(TP + FN)NFR (%) = TN/(TN + FP)
4. Results
4.1. Manual Mapping of the Flooded Area
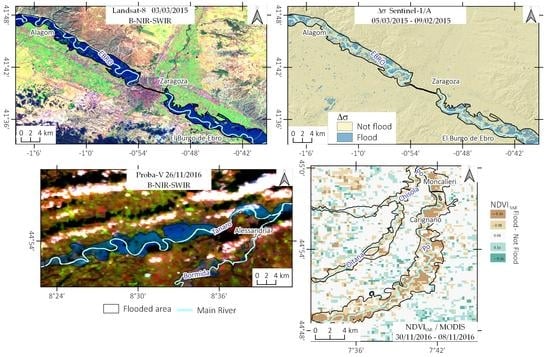
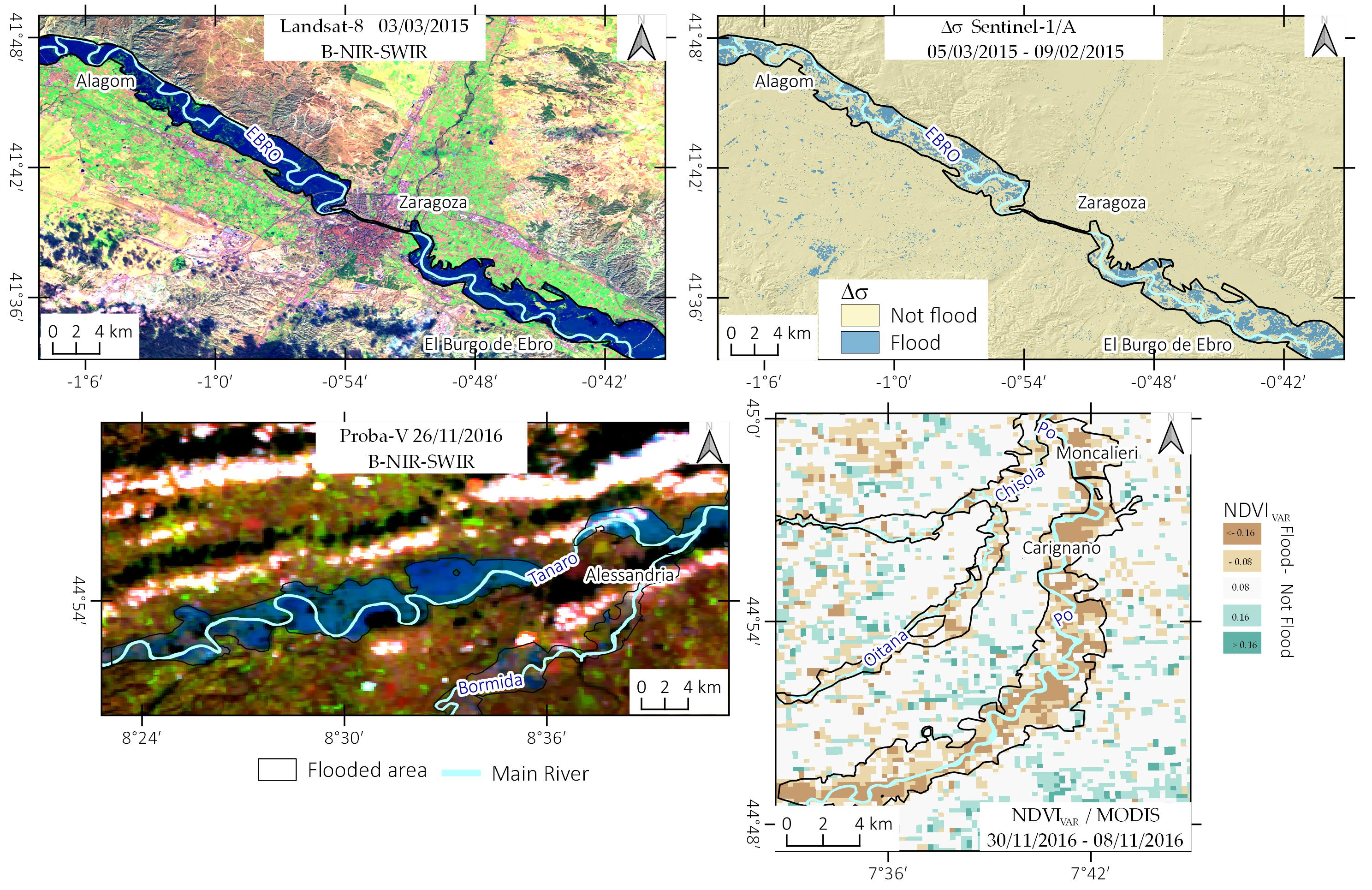
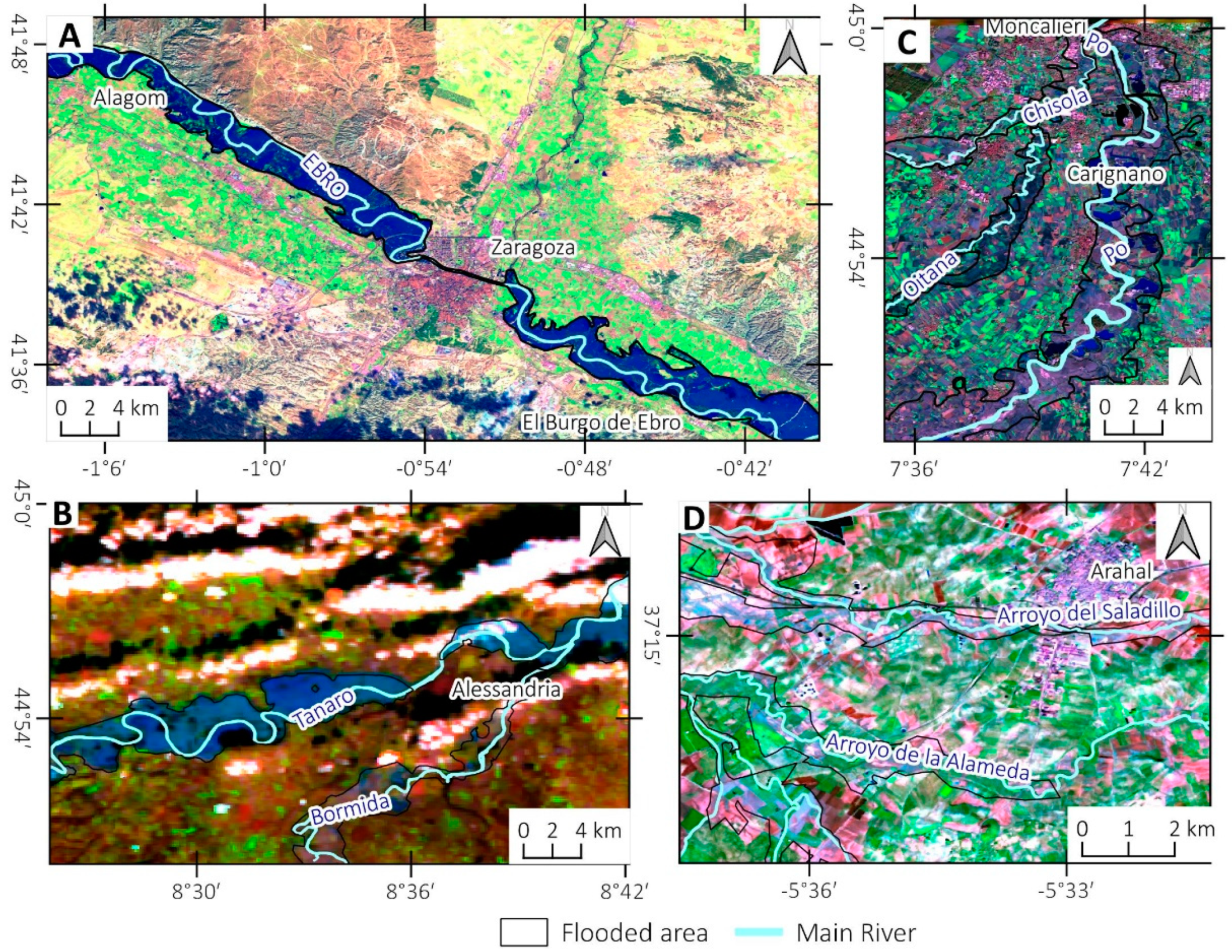
- In the Ebro valley near Zaragoza (Figure 4A), we used a Landsat-8 co-flood image acquired on 2 March 2018; in this case, the false-color image allowed mapping the entire flooded area.
- In the Po River basin, around Alessandria town (Figure 4C), we used the Proba-V image acquired in the morning of 26 November 2016. In this case, it was possible to map most of the area flooded by Tanaro River, but the area flooded by Bormida River was not clearly detectable.
- In the Po River basin, at the South of Turin city (Figure 4B), the Sentinel-2 post-flood image shows only weak traces, and the semi-automatic classifications better identified the inundated area.
- In the Arahal area (Figure 4D), the Sentinel-2 post-flood image shows flood traces that are very difficult to detect, and the manual mapping fails. Here, we needed to use the automatic extraction of the flooded area for more reliable results.
4.2. Semi-Automatic Mapping of the Flooded Area
4.2.1. SAR Data Analysis
- SAR_AC. In the case of the Ebro River flood, the classification of the Sentinel-1 image acquired on 5 March 2015, i.e., two-three days after the flood peak (when most of the areas remain inundated according to MODIS data), allowed good detection of the flooded areas (Figure 5A). It is also possible to observe false positives, i.e., areas wrongly classified as flooded, most likely related to topographic artefacts or flat surfaces (e.g., airport ramp). Figure 5B shows the SAR_AC based on the Sentinel-1 image acquired on 28 November 2016 over the areas inundated by the Tanaro and Bormida Rivers near Alessandria. The flooded areas were detectable more easily for the Tanaro River, where the soil remained submerged two days after the flood peak, than for the Bormida River. The analysis performed over the area flooded by the Po River did not show significant results. In the Arahal area, the flooded area was partially detected with images acquired in the early morning of 29 November 2017, a few hours before the flood peak (Figure 5C).
- Δσo backscattering variation-based analysis. Compared with the SAR_AR-based analysis, such an approach allows achieving more-accurate results by exploiting calibrated Sentinel-1 data and image log ratios between the post- and pre-flood images (i.e., Δσo = log σo post-log σo pre). In addition, the comparison with pre-flood data allowed discriminating flooded areas from permanent water bodies. For most of the cases, we used VH polarization and Δσo > 0.6 as a threshold. In the case of Zaragoza (Figure 6A), we used the post-flood image of 5 March 2015 (acquired three days after the discharge peak), and the pre-flood image of 9 February 2015. The flooded area was partially detected with the semi-automatic methodology. However, this result allowed mapping of the entire inundated area with a visual interpretation. The results are also in agreement with MODIS data acquired on the same date. The comparison with a water-depth model showed that the areas remaining classified as flooded on the Sentinel-1 image approximately correspond to regions in which the water depth during the flood peak was higher than 1.5 m. In the case of Alessandria and Turin, we used the post-flood image of 28 November 2016 and the pre-flood image of 22 November 2016. Results show residual inundated areas. In particular, as already mentioned, the flooding pattern remains visible in the case of Tanaro River but not for the southern region of Turin, in which the remaining flooded areas are too small to be detected with Sentinel-1 data. In the case of Arahal (Figure 6D), we used VV polarization, which showed better performance concerning VH. We compared pre-flood (23 November 2017) with near co-flood images of 29 November 2017. In this case, we found that the threshold of 0.3 was the best value to detect flooded areas. The Sentinel-1 image was acquired in the early morning of 29 November 2017, some hours before the flood peak; most likely, the inundated areas are underestimated.
4.2.2. Multispectral Data Analysis
4.3. Flood, Mapping Refinement Using Water Depth DEM and Ancillary Data
4.4. Flood Map Validation and Statistics
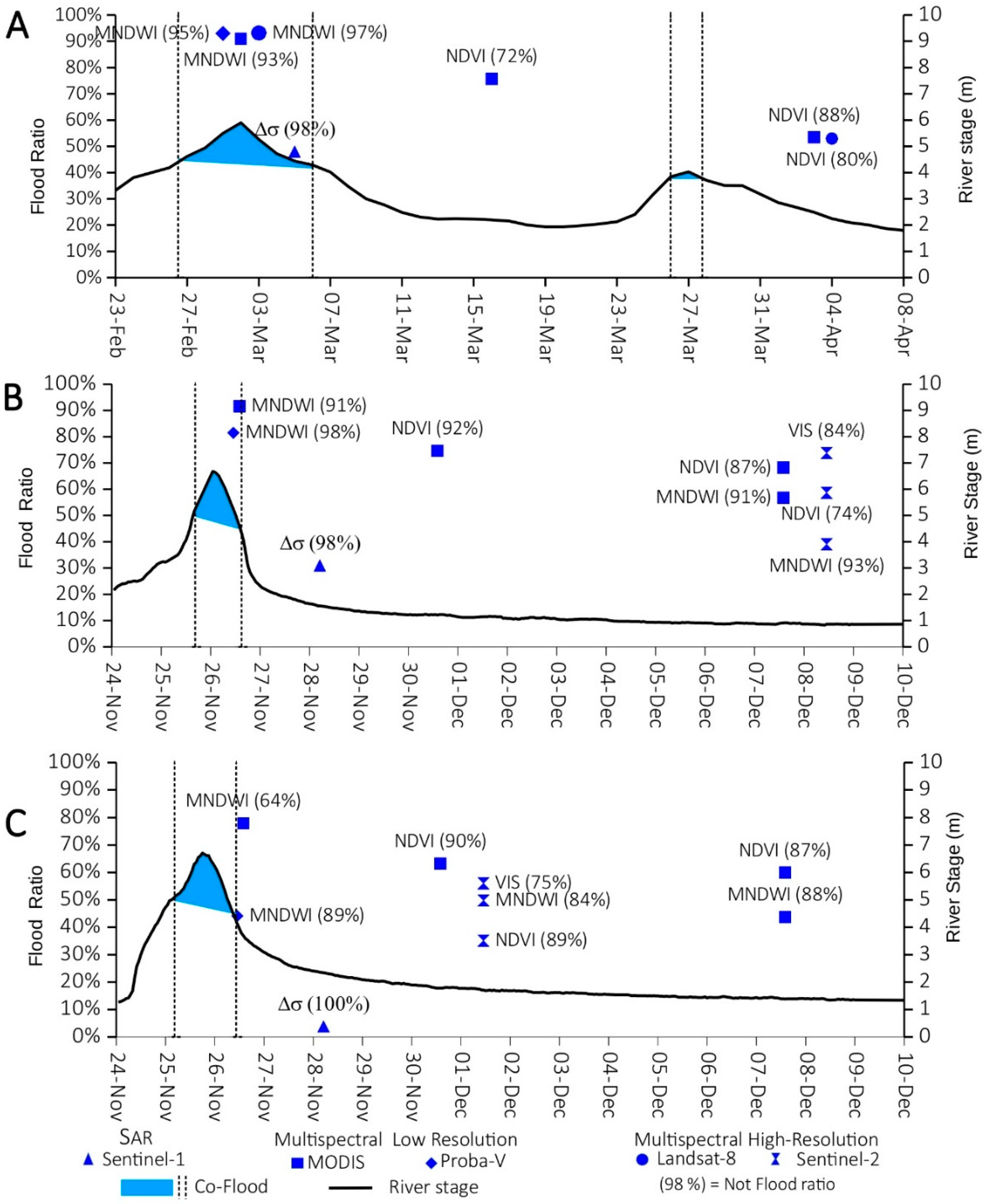
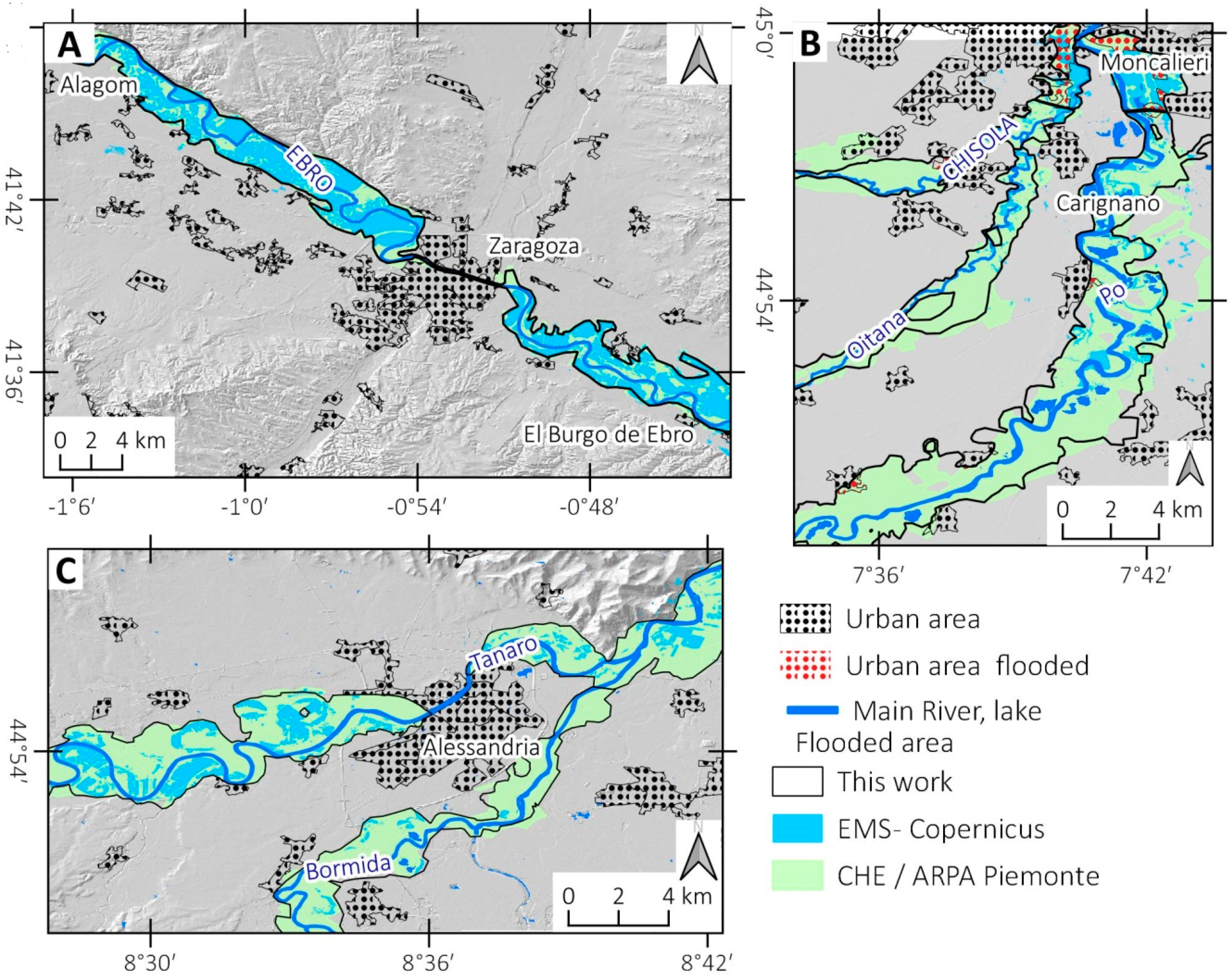
- The area flooded by the Ebro River near Zaragoza in 2015 (Figure 13A). In this case, co-flood data at low resolution (MODIS-Terra/Aqua and Proba-V) and medium-high resolution (Landsat-8) allowed mapping the entire flooded area (FR > 95%) with few false positive values. In this case, spatial resolution has little influence on the accuracy of flooded area detection. The Δσo map made with Sentinel-1 data acquired two days after the maximum flood shows that approximately 50% of the area is detectable with an NFR (≈98%). With the map based on Sentinel-1 data, it was nonetheless possible to detect a clear pattern that identifies entire flooded areas.
- The area flooded by Tanaro near Alessandria in 2016 (Figure 13B). Here, there are high values of FR for near co-flood data of MNDWI based on MODIS-Aqua (FR ≈ 90%) and Proba-V (FR ≈ 82%). For a post-flood image, the relationship “time of flood peak vs. time of satellite pass” is more important than spatial resolution; 250 m NDVI based on MODIS data of 30 November 2016 show a better result (FR ≈ 80%) than do 10 m NDVI based on Sentinel-2 of 8 December 2016 (FR ≈ 60%). SAR data based on 28 November imagery from Sentinel-1 show low values of FR (≈20%), making detecting the entire flooded area more complicated. Another critical factor influencing flood detection with post-flood data is the local conditions. In particular, the presence of a thin layer of silt deposits on crop fields helped the identification of the inundated area. Two weeks after the flood, the VISvar based on Sentinel-2 data showed an FR of 70% and NFR ≈ 84%
- The area flooded by the Po at the south of Turin, compared with Carignano gauge (Figure 13C). Here, the flood detection presented results similar to those of the Alessandria area. In particular, Sentinel-2 data acquired on 1 December 2016 show better results for MNDWIvar (≈50% FR) with respect to NDVIvar. (≈35% FR). It was not possible to the map the flooded area with Δσo of Sentinel-1 because three days after the flood peak, only 4% of the inundated area was detected. For this area, the accuracy in flood detection is also unrelated to spatial resolution; the best performance comes from MNDWI based on the MODIS image of 26 November 2016 (FR ≈ 80%).
4.5. Comparing Flood-Mapping Approaches: Automatic Emergency, Traditional and Combined Approach
5. Discussion
- The time factor is the most critical parameter. If a co-flood image is available, the detection and the refinement of the inundated area are more straightforward and require a short time. To know the time of maximum inundation, data from river gauge stations (e.g., for the Ebro, Po, and Tanaro case studies) can be considered. If river gauge station data are not available (e.g., Arahal case study), it is often possible to estimate the time of inundation from ancillary data found on the web such as news, photos, or videos. Medium-low resolution multispectral satellites (MODIS, Proba-V, Sentinel-3), with their daily revisit time, are more likely to acquire co-flood images for many flood events. However, it is less probable to have co-flood SAR images acquired by Sentinel-1, which in 2018 are the only SAR satellites providing free images. The time elapsed from the flood peak also influences the band ratios to use; MNDWIvar shows better performance in the short term, whereas NDVIvar and VISvar have better performances over the long term because MNDWI is more sensitive to open water; changes in NDVI and VIS are primarily related to vegetation damage or silt deposits in flooded areas. Concerning the pre-flood images used as a benchmark, the one acquired as close as possible to the flood event should be selected to have similar conditions of land use and sun illumination.
- The use of a single acquisition date with respect to image differences with pre-flood must be considered in the semi-automatic mapping: In the first case, permanent water bodies outside flooded areas are wrongly classified as flooded. In the second case, the water bodies inside the flooded area are not classified as flooded. This issue can be solved using a mask of the permanent water body.
- The sky-condition is another relevant parameter that limits the availability of co-flood images. Indeed, only SAR satellites can acquire images under cloudy conditions. In our cases, the area flooded around Zaragoza was cloud free during the 2015 flooding because the flood peak arrived several days after the meteorological event, whereas cloudy conditions did limit the availability of images for the 2016 Po basin flood.
- The spatial features of the flooded area represent a constraint on satellite spatial resolution. Small, inundated areas (e.g., Arahal case study) cannot be mapped by low-resolution satellites. In addition, an area flooded by a small stream has a very short co-flood time interval.
- The extent of the affected area. For the main river, it might require more than one image to map the whole river section affected by the flood. In addition, the time of maximum flood changes along the stream and is not the same for tributaries. For instance, the flood waves of the Po and Ebro Rivers transited over several days from upstream to downstream.
- Land use and morphology of the flooded area. These factors are important in choosing the satellite image. Inundations occurring on cultivated crops in floodplains can be easily detected by most satellites. In addition, several days after the flood, with multi-spectral data, it is possible to recognize flooded areas easily, particularly if sediments cover crop fields. In urban or densely forested regions, detection of the flooded areas is more complicated. In the arid region, the effect on NDVI can be opposite, with an increase of vegetation index in the flooded area [67]. In many cases, high-resolution data and field surveys remain necessary for a reliable mapping.
- With the semi-automatic approach, we used empirical thresholds to detect flooded areas. The semi-automatic approach allows selecting the best threshold that defines a geomorphological based pattern of the flooded area. Conversely, the semi-automatic approach requires specific operator experience in flood dynamics.
- Results also show that the direct visual mapping of flooding areas can be performed only when the flooded area is visible in co-flood images. Otherwise, it is better to use semi-automatic detection followed by the refinement step.
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Klein, T.; Nilsson, M.; Persson, A.; Håkansson, B. From Open Data to Open Analyses—New Opportunities for Environmental Applications? Environments 2017, 4, 32. [Google Scholar] [CrossRef]
- Turner, W.; Rondinini, C.; Pettorelli, N.; Mora, B.; Leidner, A.K.; Szantoi, Z.; Buchanan, G.; Dech, S.; Dwyer, J.; Herold, M. Free and open-access satellite data are key to biodiversity conservation. Biol. Conserv. 2015, 182, 173–176. [Google Scholar] [CrossRef]
- Li, S.; Dragicevic, S.; Castro, F.A.; Sester, M.; Winter, S.; Coltekin, A.; Pettit, C.; Jiang, B.; Haworth, J.; Stein, A. Geospatial big data handling theory and methods: A review and research challenges. ISPRS J. Photogramm. Remote Sens. 2016, 115, 119–133. [Google Scholar] [CrossRef]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Berger, M.; Moreno, J.; Johannessen, J.A.; Levelt, P.F.; Hanssen, R.F. ESA’s sentinel missions in support of Earth system science. Remote Sens. Environ. 2012, 120, 84–90. [Google Scholar] [CrossRef]
- Hansen, M.C.; Loveland, T.R. A review of large area monitoring of land cover change using Landsat data. Remote Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]
- Justice, C.O.; Vermote, E.; Townshend, J.R.; Defries, R.; Roy, D.P.; Hall, D.K.; Salomonson, V.V.; Privette, J.L.; Riggs, G.; Strahler, A. The Moderate Resolution Imaging Spectroradiometer (MODIS): Land remote sensing for global change research. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1228–1249. [Google Scholar] [CrossRef]
- EOSDIS Worldview. Available online: https://worldview.earthdata.nasa.gov/ (accessed on 6 March 2018).
- Cignetti, M.; Manconi, A.; Manunta, M.; Giordan, D.; De Luca, C.; Allasia, P.; Ardizzone, F. Taking advantage of the ESA G-pod service to study ground deformation processes in high mountain areas: A valle d’aosta case study, northern Italy. Remote Sens. 2016, 8, 852. [Google Scholar] [CrossRef]
- Galve, J.P.; Pérez-Peña, J.V.; Azañón, J.M.; Closson, D.; Caló, F.; Reyes-Carmona, C.; Jabaloy, A.; Ruano, P.; Mateos, R.M.; Notti, D. Evaluation of the SBAS InSAR Service of the European Space Agency’s Geohazard Exploitation Platform (GEP). Remote Sens. 2017, 9, 1291. [Google Scholar] [CrossRef]
- Congedo, L. Semi-automatic classification plugin documentation. Release 2016, 4, 29. [Google Scholar]
- Ward, P.J.; Jongman, B.; Weiland, F.S.; Bouwman, A.; van Beek, R.; Bierkens, M.F.; Ligtvoet, W.; Winsemius, H.C. Assessing flood risk at the global scale: Model setup, results, and sensitivity. Environ. Res. Lett. 2013, 8, 044019. [Google Scholar] [CrossRef]
- Moel, H.D.; Alphen, J.V.; Aerts, J. Flood maps in Europe–methods, availability and use. Nat. Hazards Earth Syst. Sci. 2009, 9, 289–301. [Google Scholar] [CrossRef]
- Amadio, M.; Mysiak, J.; Carrera, L.; Koks, E. Improving flood damage assessment models in Italy. Nat. Hazards 2016, 82, 2075–2088. [Google Scholar] [CrossRef]
- Ran, J.; Nedovic-Budic, Z. Integrating spatial planning and flood risk management: A new conceptual framework for the spatially integrated policy infrastructure. Comput. Environ. Urban Syst. 2016, 57, 68–79. [Google Scholar] [CrossRef]
- Fayne, J.; Bolten, J.; Lakshmi, V.; Ahamed, A. Optical and Physical Methods for Mapping Flooding with Satellite Imagery. In Remote Sensing of Hydrological Extremes; Springer: Berlin/Heidelberg, Germany, 2017; pp. 83–103. [Google Scholar]
- Musa, Z.N.; Popescu, I.; Mynett, A. A review of applications of satellite SAR, optical, altimetry and DEM data for surface water modelling, mapping and parameter estimation. Hydrol. Earth Syst. Sci. 2015, 19, 3755–3769. [Google Scholar] [CrossRef]
- Schumann, G.; Bates, P.D.; Apel, H.; Aronica, G.T. Global Flood Hazard Mapping, Modeling, and Forecasting: Challenges and Perspectives. Glob. Flood Hazard Appl. Model. Mapp. Forecast. 2018, 239–244. Available online: https://agupubs.onlinelibrary.wiley.com/doi/10.1002/9781119217886.ch14 (accessed on 20 October 2018).
- Chen, Y.; Huang, C.; Ticehurst, C.; Merrin, L.; Thew, P. An evaluation of MODIS daily and 8-day composite products for floodplain and wetland inundation mapping. Wetlands 2013, 33, 823–835. [Google Scholar] [CrossRef]
- Nigro, J.; Slayback, D.; Policelli, F.; Brakenridge, G.R. NASA/DFO MODIS Near Real-Time (NRT) Global Flood Mapping Product Evaluation of Flood and Permanent Water Detection. Eval. Greenbelt MD 2014. Available online: https://floodmap.modaps.eosdis.nasa.gov/documents/NASAGlobalNRTEvaluationSummary_v4.pdf (accessed on 20 October 2018).
- Wang, Y.; Colby, J.D.; Mulcahy, K.A. An efficient method for mapping flood extent in a coastal floodplain using Landsat TM and DEM data. Int. J. Remote Sens. 2002, 23, 3681–3696. [Google Scholar] [CrossRef]
- Rahman, M.S.; Di, L. The state of the art of spaceborne remote sensing in flood management. Nat. Hazards 2017, 85, 1223–1248. [Google Scholar] [CrossRef]
- Ticehurst, C.; Guerschman, J.P.; Chen, Y. The strengths and limitations in using the daily MODIS open water likelihood algorithm for identifying flood events. Remote Sens. 2014, 6, 11791–11809. [Google Scholar] [CrossRef]
- Chignell, S.M.; Anderson, R.S.; Evangelista, P.H.; Laituri, M.J.; Merritt, D.M. Multi-temporal independent component analysis and Landsat 8 for delineating maximum extent of the 2013 Colorado front range flood. Remote Sens. 2015, 7, 9822–9843. [Google Scholar] [CrossRef]
- Boni, G.; Ferraris, L.; Pulvirenti, L.; Squicciarino, G.; Pierdicca, N.; Candela, L.; Pisani, A.R.; Zoffoli, S.; Onori, R.; Proietti, C. A prototype system for flood monitoring based on flood forecast combined with COSMO-SkyMed and Sentinel-1 data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2794–2805. [Google Scholar] [CrossRef]
- Schumann, G.J.-P.; Moller, D.K. Microwave remote sensing of flood inundation. Phys. Chem. Earth Parts ABC 2015, 83, 84–95. [Google Scholar] [CrossRef]
- Refice, A.; Capolongo, D.; Pasquariello, G.; D’Addabbo, A.; Bovenga, F.; Nutricato, R.; Lovergine, F.P.; Pietranera, L. SAR and InSAR for flood monitoring: Examples with COSMO-SkyMed data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2711–2722. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Guerriero, L.; Ferrazzoli, P. Flood monitoring using multi-temporal COSMO-SkyMed data: Image segmentation and signature interpretation. Remote Sens. Environ. 2011, 115, 990–1002. [Google Scholar] [CrossRef]
- Clement, M.A.; Kilsby, C.G.; Moore, P. Multi-temporal synthetic aperture radar flood mapping using change detection. J. Flood Risk Manag. 2017. [Google Scholar] [CrossRef]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Cian, F.; Marconcini, M.; Ceccato, P. Normalized Difference Flood Index for rapid flood mapping: Taking advantage of EO big data. Remote Sens. Environ. 2018, 209, 712–730. [Google Scholar] [CrossRef]
- D’Addabbo, A.; Refice, A.; Pasquariello, G.; Lovergine, F. SAR/optical data fusion for flood detection. In Proceedings of the IEEE International on Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 7631–7634. [Google Scholar]
- Demirkesen, A.C.; Evrendilek, F.; Berberoglu, S.; Kilic, S. Coastal flood risk analysis using Landsat-7 ETM+ imagery and SRTM DEM: A case study of Izmir, Turkey. Environ. Monit. Assess. 2007, 131, 293–300. [Google Scholar] [CrossRef] [PubMed]
- Gianinetto, M.; Villa, P.; Lechi, G. Postflood damage evaluation using Landsat TM and ETM+ data integrated with DEM. IEEE Trans. Geosci. Remote Sens. 2006, 44, 236–243. [Google Scholar] [CrossRef]
- Pierdicca, N.; Chini, M.; Pulvirenti, L.; Macina, F. Integrating physical and topographic information into a fuzzy scheme to map flooded area by SAR. Sensors 2008, 8, 4151–4164. [Google Scholar] [CrossRef] [PubMed]
- Brivio, P.A.; Colombo, R.; Maggi, M.; Tomasoni, R. Integration of remote sensing data and GIS for accurate mapping of flooded areas. Int. J. Remote Sens. 2002, 23, 429–441. [Google Scholar] [CrossRef]
- Chen, J.L.; Wilson, C.R.; Tapley, B.D. The 2009 exceptional Amazon flood and interannual terrestrial water storage change observed by GRACE. Water Resour. Res. 2010, 46. [Google Scholar] [CrossRef]
- Massari, C.; Camici, S.; Ciabatta, L.; Brocca, L. Exploiting Satellite-Based Surface Soil Moisture for Flood Forecasting in the Mediterranean Area: State Update Versus Rainfall Correction. Remote Sens. 2018, 10, 292. [Google Scholar] [CrossRef]
- Malinowski, R.; Groom, G.B.; Heckrath, G.; Schwanghart, W. Do Remote Sensing Mapping Practices Adequately Address Localized Flooding? A Critical Overview. Springer Sci. Rev. 2017, 5, 1–17. [Google Scholar] [CrossRef]
- Copernicus Emergency Management Service. Available online: http://emergency.copernicus.eu/mapping/list-of-components/EMSR120 (accessed on 7 March 2018).
- Ajmar, A.; Boccardo, P.; Broglia, M.; Kucera, J.; Wania, A. Response to flood events: The role of satellite-based emergency mapping and the experience of the Copernicus emergency management service. Flood Damage Surv. Assess. New Insights Res. Pract. 2017, 213–228. [Google Scholar] [CrossRef]
- Kugler, Z.; De Groeve, T. The global flood detection system. In JRC Scientific and Technical Reports; JRC: Ispra, Italy, 2007; pp. 1–45. Available online: http://publications.jrc.ec.europa.eu/repository/handle/JRC44149 (accessed on 20 October 2018).
- Global Floods Detection System. Available online: http://www.gdacs.org/flooddetection/overview.aspx (accessed on 7 March 2018).
- Policelli, F.; Slayback, D.; Brakenridge, B.; Nigro, J.; Hubbard, A.; Zaitchik, B.; Carroll, M.; Jung, H. The NASA global flood mapping system. In Remote Sensing of Hydrological Extremes; Springer: Berlin/Heidelberg, Germany, 2017; pp. 47–63. [Google Scholar]
- Revilla-Romero, B.; Hirpa, F.A.; Pozo, J.T.; Salamon, P.; Brakenridge, R.; Pappenberger, F.; De Groeve, T. On the use of global flood forecasts and satellite-derived inundation maps for flood monitoring in data-sparse regions. Remote Sens. 2015, 7, 15702–15728. [Google Scholar] [CrossRef]
- Bales, J.D.; Wagner, C.R. Sources of uncertainty in flood inundation maps. J. Flood Risk Manag. 2009, 2, 139–147. [Google Scholar] [CrossRef]
- Balasch, J.C.; Pino, D.; Ruiz-Bellet, J.L.; Tuset, J.; Barriendos, M.; Castelltort, X.; Peña, J.C. The extreme floods in the Ebro River basin since 1600 CE. Sci. Total Environ. 2019, 646, 645–660. [Google Scholar] [CrossRef] [PubMed]
- Confederación Hidrográfica del Ebro (CHE). Informe Sobre las Avenidas del Primer Trimestre de 2015 en la Cuenca del Ebro; CHE: Zaragoza, Spain, 2015; Available online: ftp://ftp.chebro.es/memorias/Memoria2015.pdf (accessed on 20 October 2018).
- Anchuela, Ó.P.; Revuelto, C.; Sainz, A.C.; Cordero, J.R.; Pocoví, A. Las crecidas del Ebro de febrero/marzo de 2015.¿ Qué hemos aprendido y qué falta por aprender? Geogaceta 2016, 60, 119–122. [Google Scholar]
- Floods in Northern Spain as Ebro River Breaks its Banks–FloodList. Available online: http://floodlist.com/europe/floods-northern-spain-ebro-river (accessed on 7 March 2018).
- Foudi, S.; Osés-Eraso, N.; Tamayo, I. Integrated spatial flood risk assessment: The case of Zaragoza. Land Use Policy 2015, 42, 278–292. [Google Scholar] [CrossRef]
- Copernicus Emergency Management Service (© 2015 European Union), EMSR120-Floods in Spain. Available online: http://emergency.copernicus.eu/mapping/list-of-components/EMSR120 (accessed on 6 March 2018).
- Ebro River Authorithy (CHE) Geoportal. Available online: http://iber.chebro.es/geoportal/ (accessed on 7 March 2018).
- Luino, F. The flood and landslide event of 4–6 November 1994 in Piedmont Region (Northwestern Italy): Causes and related effects in Tanaro Valley. Phys. Chem. Earth Part Solid Earth Geod. 1999, 24, 123–129. [Google Scholar] [CrossRef]
- Pinto, J.G.; Ulbrich, S.; Parodi, A.; Rudari, R.; Boni, G.; Ulbrich, U. Identification and ranking of extraordinary rainfall events over Northwest Italy: The role of Atlantic moisture. J. Geophys. Res. Atmosp. 2013, 118, 2085–2097. [Google Scholar] [CrossRef]
- ARPA Piemonte. Evento Alluvionale 21–26 Novembre 2016. 2016. Available online: https://www.arpa.piemonte.it/pubblicazioni-2/relazioni-tecniche/analisi-eventi/eventi-2016/rapporto-preliminare-novembre-2016-def.pdf (accessed on 20 October 2018).
- Giordan, D.; Notti, D.; Villa, A.; Zucca, F.; Calò, F.; Pepe, A.; Dutto, F.; Pari, P.; Baldo, M.; Allasia, P. Low cost, multiscale and multi-sensor application for flooded area mapping. Nat. Hazards Earth Syst. Sci. 2018, 18, 1493–1516. [Google Scholar] [CrossRef]
- Copernicus Emergency Management Service (© 2016 European Union), EMSR192-Floods in Northern Italy. Available online: http://emergency.copernicus.eu/mapping/list-of-components/EMSR192 (accessed on 6 March 2018).
- Spain–Heavy Rain Floods Parts of Andalusia–FloodList. Available online: http://floodlist.com/europe/spain-floods-andalusia-november-2017 (accessed on 7 March 2018).
- Po River Agency (AIPO) Po River Stage at Carignano Gauge. Available online: http://46.37.22.75:8085/public/index.php?load=sto&station=2198 (accessed on 7 March 2018).
- Po River Agency (AIPO) Tanaro River Stage at Alessandria Gauge. Available online: http://46.37.22.75:8085/public/index.php?load=ist&station=2882 (accessed on 7 March 2018).
- Sentinel Scientific Data Hub. Available online: https://scihub.copernicus.eu/ (accessed on 7 March 2018).
- De Zan, F.; Guarnieri, A.M. TOPSAR: Terrain observation by progressive scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Single Look Complex-Sentinel-1 SAR Technical Guide-Sentinel Online. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-1-sar/products-algorithms/level-1-algorithms/single-look-complex (accessed on 27 June 2018).
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Franceschetti, G.; Lanari, R. Synthetic Aperture Radar Processing; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Mohammadi, A.; Costelloe, J.F.; Ryu, D. Application of time series of remotely sensed normalized difference water, vegetation and moisture indices in characterizing flood dynamics of large-scale arid zone floodplains. Remote Sens. Environ. 2017, 190, 70–82. [Google Scholar] [CrossRef]
- Vermote, E.; Wolfe, R. MOD09GA MODIS/Terra Surface Reflectance Daily L2G Global 1 km and 500 m SIN Grid V006. NASA EOSDIS Land Process. DAAC 2015. [Google Scholar] [CrossRef]
- LAADS DAAC. Available online: https://ladsweb.modaps.eosdis.nasa.gov/ (accessed on 7 March 2018).
- Francois, M.; Santandrea, S.; Mellab, K.; Vrancken, D.; Versluys, J. The PROBA-V mission: The space segment. Int. J. Remote Sens. 2014, 35, 2548–2564. [Google Scholar] [CrossRef]
- VITO EO Data Viewer. Available online: https://proba-v-mep.esa.int/applications/geo-viewer/app/# (accessed on 31 May 2018).
- U.S. Geological Survey (USGS) EarthExplorer. Available online: https://earthexplorer.usgs.gov/ (accessed on 7 March 2018).
- Michel, R.; Avouac, J.-P.; Taboury, J. Measuring ground displacements from SAR amplitude images: Application to the Landers earthquake. Geophys. Res. Lett. 1999, 26, 875–878. [Google Scholar] [CrossRef]
- Gabriel, A.K.; Goldstein, R.M. Crossed orbit interferometry: Theory and experimental results from SIR-B. Int. J. Remote Sens. 1988, 9, 857–872. [Google Scholar] [CrossRef]
- Ahamed, A.; Bolten, J.; Doyle, C.; Fayne, J. Near Real-Time Flood Monitoring and Impact Assessment Systems. In Remote Sensing of Hydrological Extremes; Springer: Berlin/Heidelberg, Germany, 2017; pp. 105–118. [Google Scholar]
- Jain, S.K.; Singh, R.D.; Jain, M.K.; Lohani, A.K. Delineation of Flood-Prone Areas Using Remote Sensing Techniques. Water Resour. Manag. 2005, 19, 333–347. [Google Scholar] [CrossRef]
- Islam, A.S.; Bala, S.K.; Haque, M.A. Flood inundation map of Bangladesh using MODIS time-series images. J. Flood Risk Manag. 2010, 3, 210–222. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Zhang, D.; Zhou, G. Estimation of soil moisture from optical and thermal remote sensing: A review. Sensors 2016, 16, 1308. [Google Scholar] [CrossRef] [PubMed]
- Gao, B.-C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Wilson, E.H.; Sader, S.A. Detection of forest harvest type using multiple dates of Landsat TM imagery. Remote Sens. Environ. 2002, 80, 385–396. [Google Scholar] [CrossRef]
- Geoportale Regione Piemonte. Available online: http://www.geoportale.piemonte.it/cms/ (accessed on 7 March 2018).
- Centro Nacional de Información Geográfica. Centro de Descargas del CNIG (IGN). Available online: http://centrodedescargas.cnig.es (accessed on 7 March 2018).
- Bates, P.D.; De Roo, A.P.J. A simple raster-based model for flood inundation simulation. J. Hydrol. 2000, 236, 54–77. [Google Scholar] [CrossRef]
- Fohringer, J.; Dransch, D.; Kreibich, H.; Schröter, K. Social media as an information source for rapid flood inundation mapping. Nat. Hazards Earth Syst. Sci. 2015, 15, 2725–2738. [Google Scholar] [CrossRef]
- Cervone, G.; Sava, E.; Huang, Q.; Schnebele, E.; Harrison, J.; Waters, N. Using Twitter for tasking remote-sensing data collection and damage assessment: 2013 Boulder flood case study. Int. J. Remote Sens. 2016, 37, 100–124. [Google Scholar] [CrossRef]
- ARPA Piemonte November 2016 Flood Webgis Viewer. Available online: https://webgis.arpa.piemonte.it/Geoviewer2D/index.html?webmap=e60084dec90847f2bc9e04c7b32e5216 (accessed on 7 March 2018).
- Pierdicca, N.; Pulvirenti, L.; Chini, M. Flood Mapping in Vegetated and Urban Areas and Other Challenges: Models and Methods. In Flood Monitoring through Remote Sensing; Springer: Berlin/Heidelberg, Germany, 2018; pp. 135–179. [Google Scholar]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. SAR-based detection of flooded vegetation–a review of characteristics and approaches. Int. J. Remote Sens. 2018, 39, 2255–2293. [Google Scholar] [CrossRef]
- Henderson, F.M.; Lewis, A.J. Radar detection of wetland ecosystems: A review. Int. J. Remote Sens. 2008, 29, 5809–5835. [Google Scholar] [CrossRef]
- Arahalinformacion2 Photo of November 2017 Flood. Available online: https://www.flickr.com/photos/124868317@N04/sets/72157690286379575/with/38696948762/ (accessed on 7 March 2018).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Band Used | Spatial Resolution (m) | Revisit Time (Day) | Data Availability |
|---|---|---|---|---|
| MODIS-Terra/Aqua | R; G; B; NIR; SWIR(2) | 250 ÷ 500 | 1 | [69] |
| Proba-V | R; B; NIR; SWIR | 100 ÷ 300 | 5 ÷ 1 | [71] |
| Landsat-8 | R; G; B; NIR; SWIR(2) | 30 | 16 | [72] |
| Sentinel-2 (a/b) | R; G; B; NIR; RE(2); SWIR(2) | 10 ÷ 20 | 5 ÷ 10 | [62] |
| Sentinel-1 (a/b) | C | 5 × 20 (SLC) | 6 ÷ 12 | [62] |
| Band Name | Wavelength Interval |
|---|---|
| Blue (B) | ~450–500 nm |
| Green (G) | ~500–620 nm |
| Red (R) | ~620–700 nm |
| Red Edge (RE) | ~700–750 nm |
| Near Infrared (NIR) | ~750–1400 nm |
| Shortwave Infrared (SWIR) | ~1400–3000 nm |
| SAR-Band (C) | ~5 cm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Notti, D.; Giordan, D.; Caló, F.; Pepe, A.; Zucca, F.; Galve, J.P. Potential and Limitations of Open Satellite Data for Flood Mapping. Remote Sens. 2018, 10, 1673. https://doi.org/10.3390/rs10111673
Notti D, Giordan D, Caló F, Pepe A, Zucca F, Galve JP. Potential and Limitations of Open Satellite Data for Flood Mapping. Remote Sensing. 2018; 10(11):1673. https://doi.org/10.3390/rs10111673
Chicago/Turabian StyleNotti, Davide, Daniele Giordan, Fabiana Caló, Antonio Pepe, Francesco Zucca, and Jorge Pedro Galve. 2018. "Potential and Limitations of Open Satellite Data for Flood Mapping" Remote Sensing 10, no. 11: 1673. https://doi.org/10.3390/rs10111673
APA StyleNotti, D., Giordan, D., Caló, F., Pepe, A., Zucca, F., & Galve, J. P. (2018). Potential and Limitations of Open Satellite Data for Flood Mapping. Remote Sensing, 10(11), 1673. https://doi.org/10.3390/rs10111673