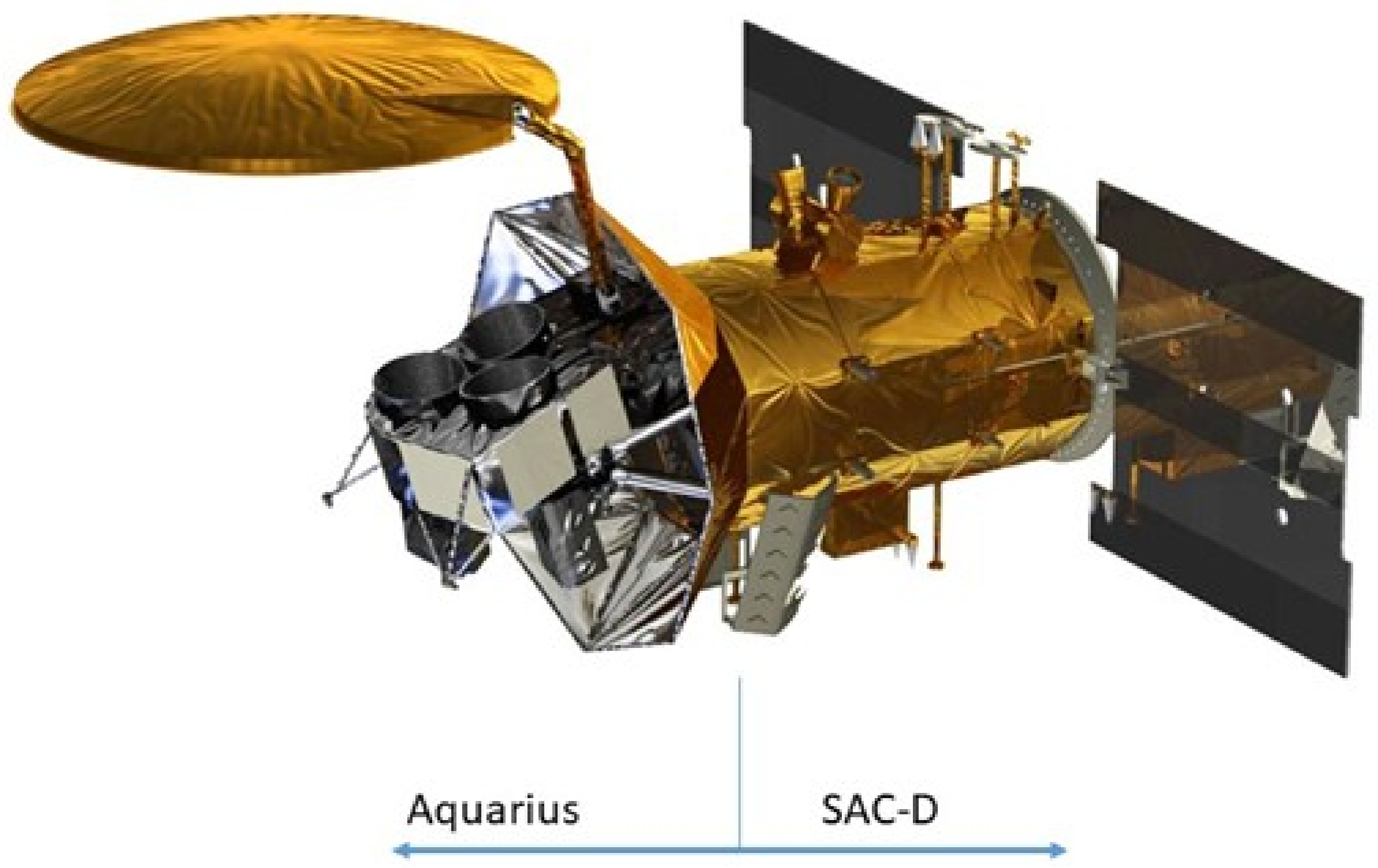
Status of Aquarius and Salinity Continuity

 ,
,  , , ,
, , ,
Abstract
:1. Introduction
2. Background
3. Results: Aquarius Version 5.0
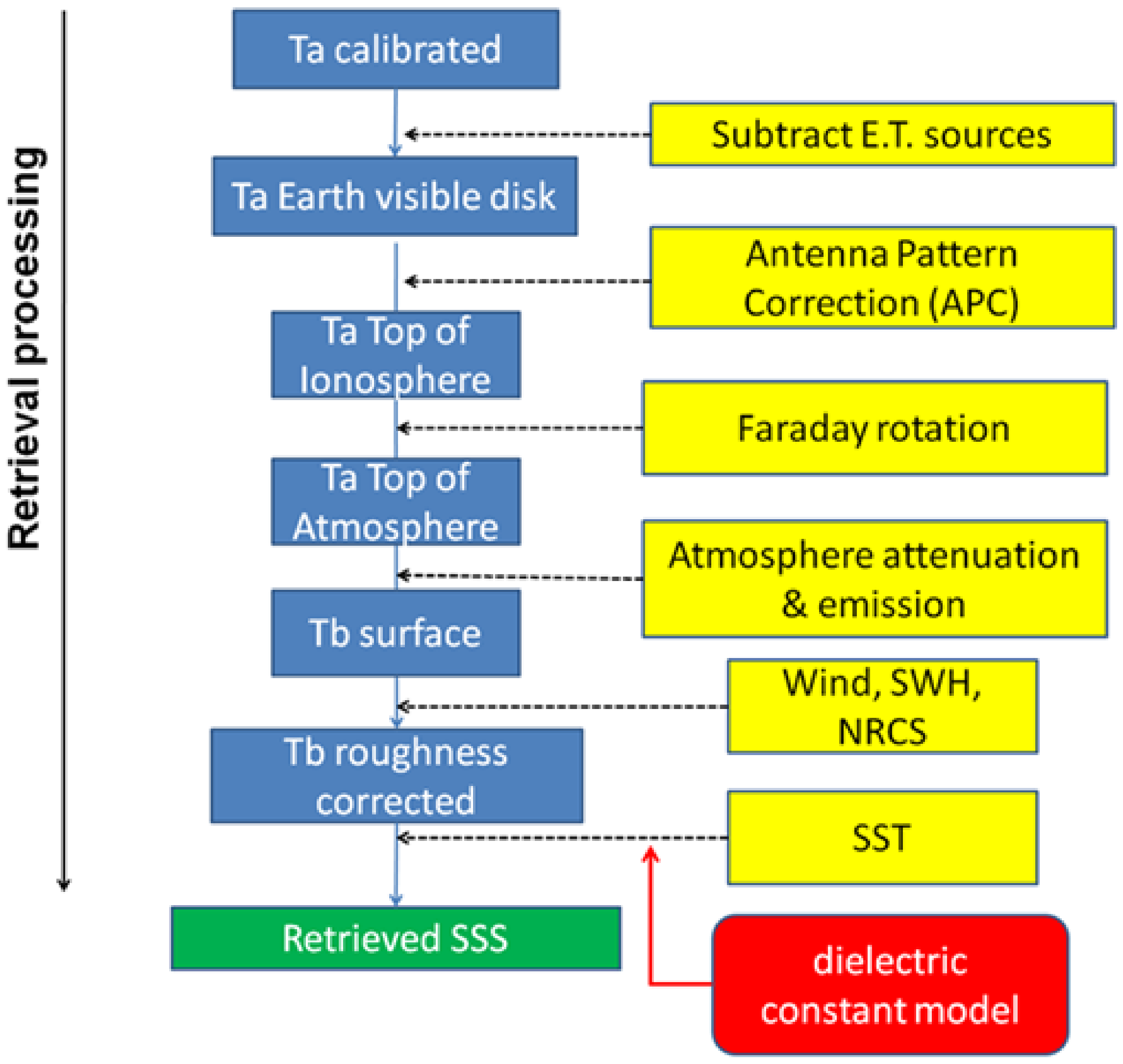
3.1. Changes in the Retrieval Algorithm
- The ancillary sea surface temperature (SST) field was changed from the National Oceanographic and Atmospheric Administration (NOAA) Optimally Interpolated (OI) SST to the SST field from the Canadian Meteorological Center (CMC);
- The reference sea surface salinity (SSS) field used in the sensor calibration and in the derivation of expected antenna temperature, TA_expected, in the forward algorithm was changed from SSS obtained from the Hybrid Coordinate Ocean Model (HYCOM) to the analyzed monthly Scripps Argo SSS;
- The model for the celestial radiation reflected from the surface into the radiometer antenna was changed to values derived from fore and aft observations of the SMAP radiometer. The advantage of this approach is that it includes the effects of surface roughness;
- The empirical symmetrization correction that corrects asc/dsc differences [1] was re-derived to reflect the improvements that resulted from the improved model for the reflected celestial radiation (above).
- The surface roughness correction was updated (i.e., compared to that described in Meissner, Wentz and Riciardulli [19]):
- ၀
- The SST dependence was adjusted.
- ၀
- The dependence on significant wave height (SWH) was omitted.
- ၀
- In addition, the correction table for dependence on wind speed and radar backscatter was updated, and as a consequence, the initial guess for the SSS field used to derive the final wind speed (i.e., “HHH” wind speed) was also updated.
- Observations at vertical and horizontal polarization are given equal weight in the retrieval of salinity (i.e., in the maximum likelihood estimate used in the last step in the retrieval);
- The L2 files include instantaneous rain rates based on the NOAA rain product, CMORPH (Climate Prediction Center Morphing). They are used to filter data for rain in the calibration and also for validating the Aquarius salinity versus in situ measurements.
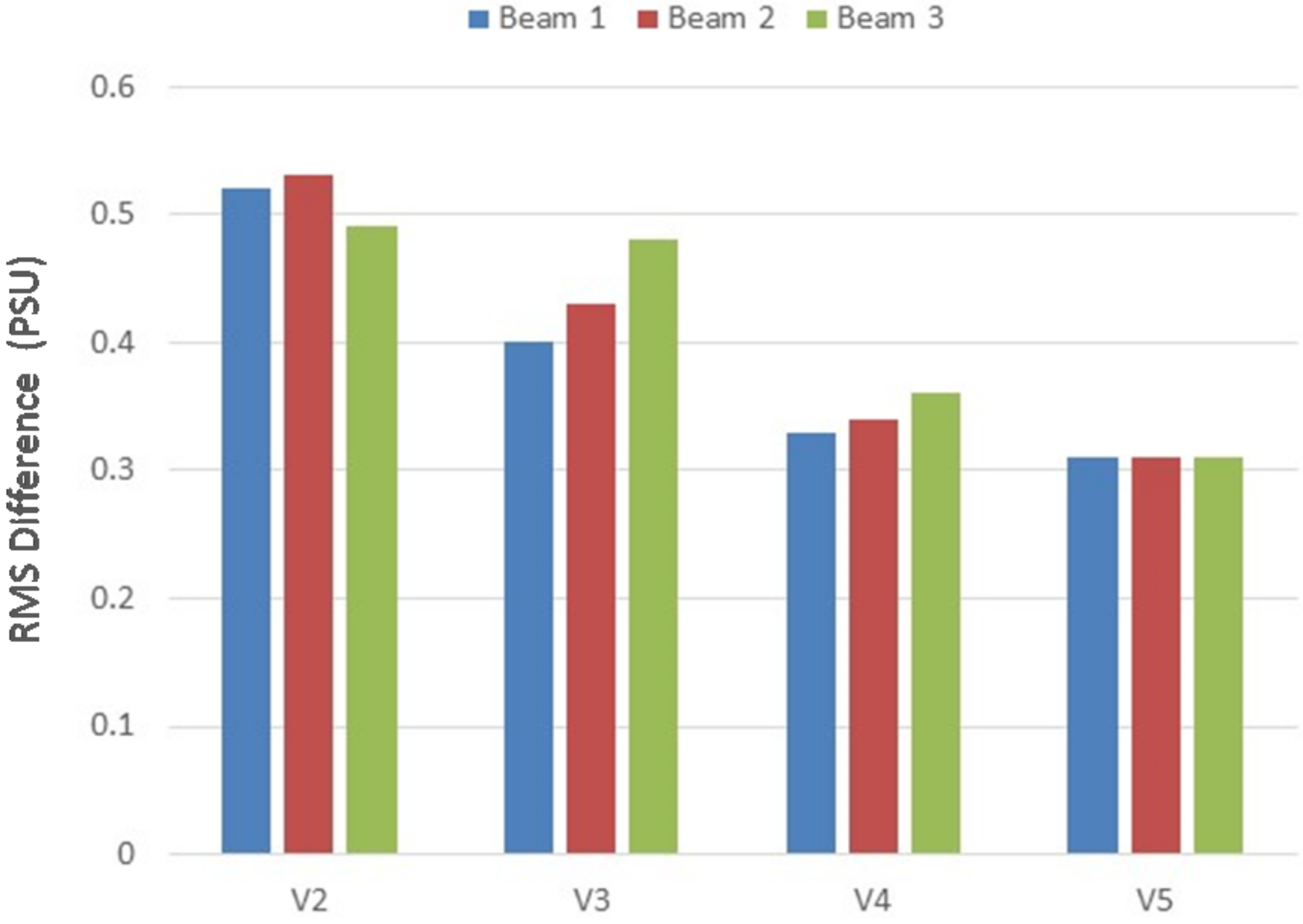
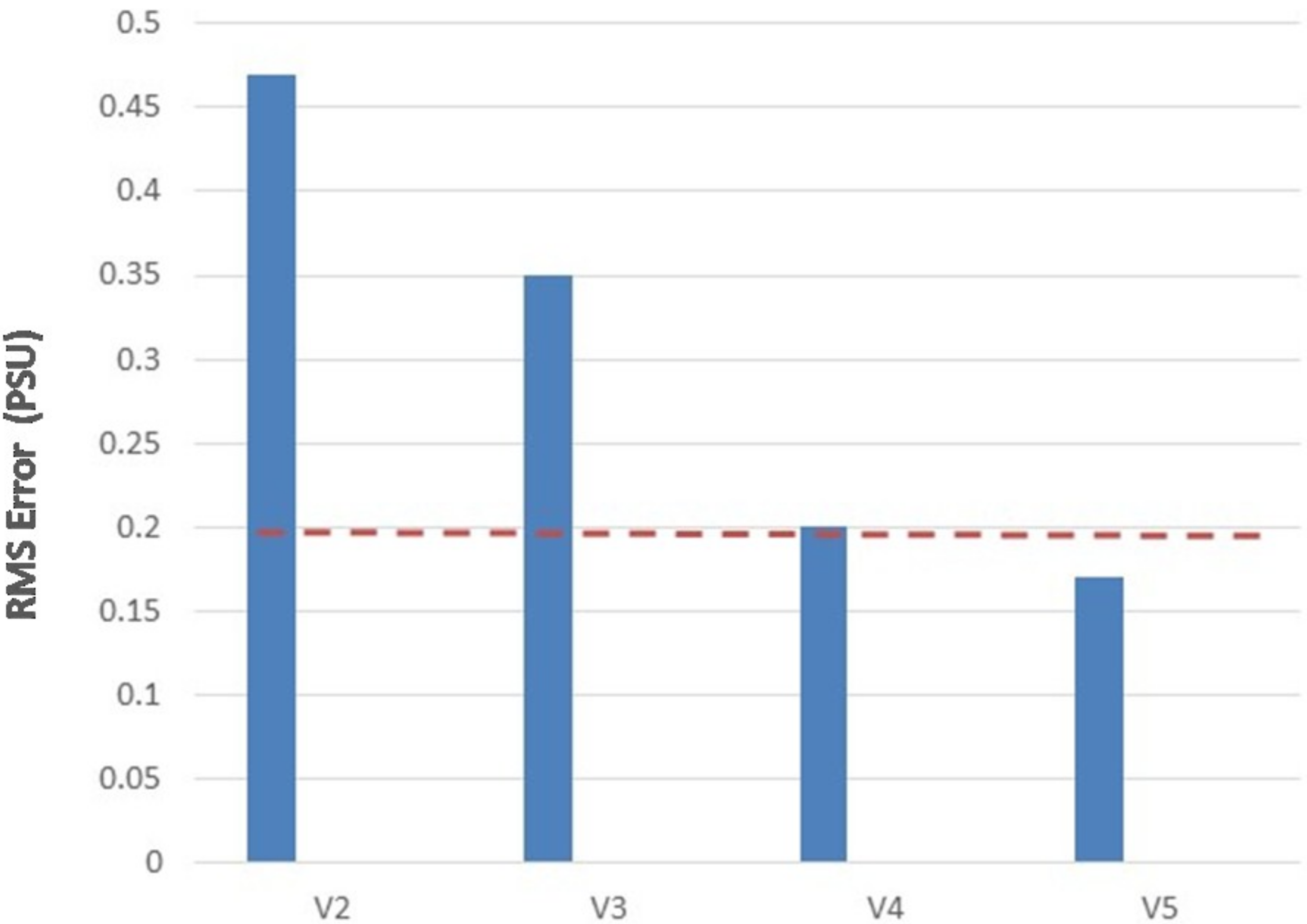
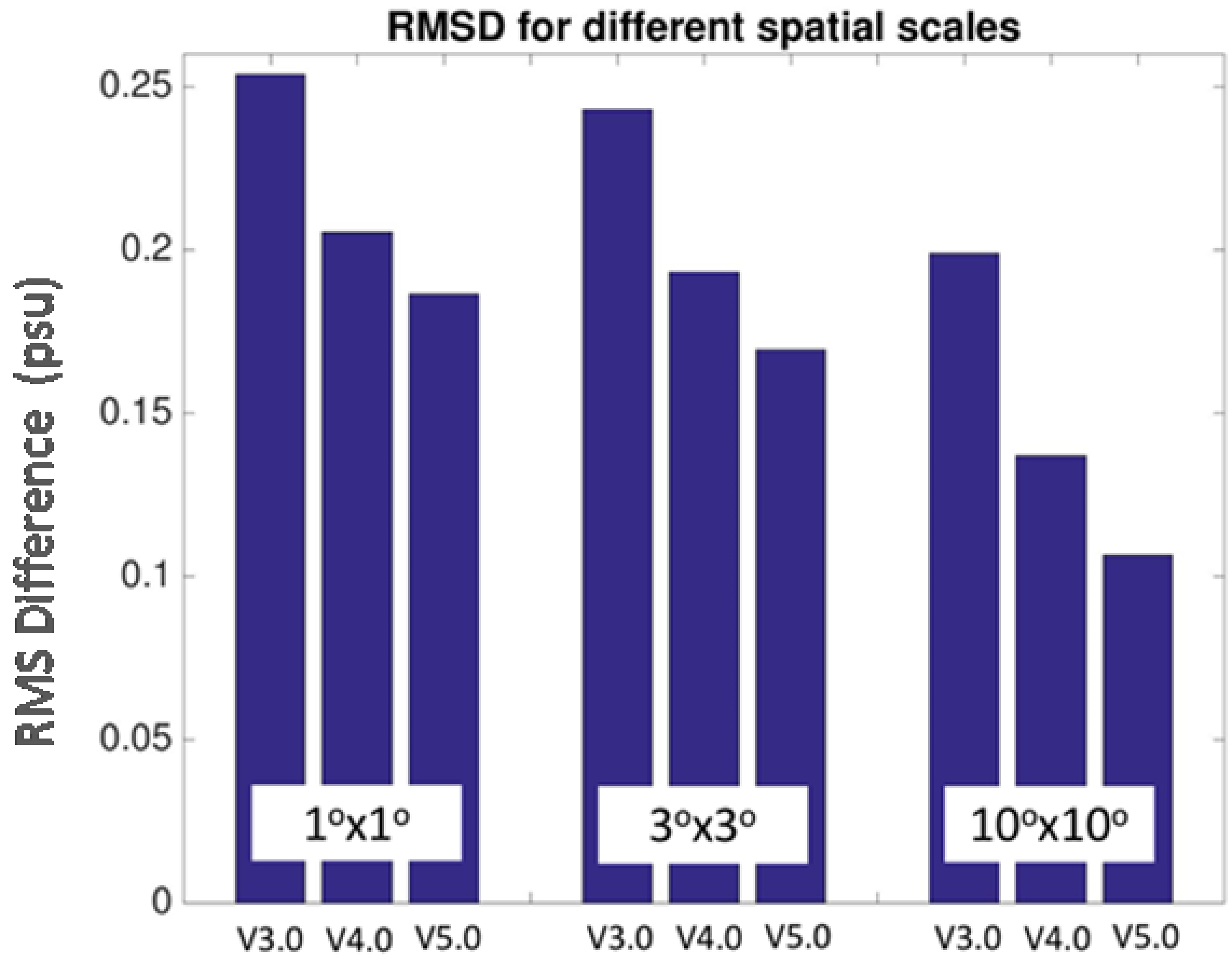
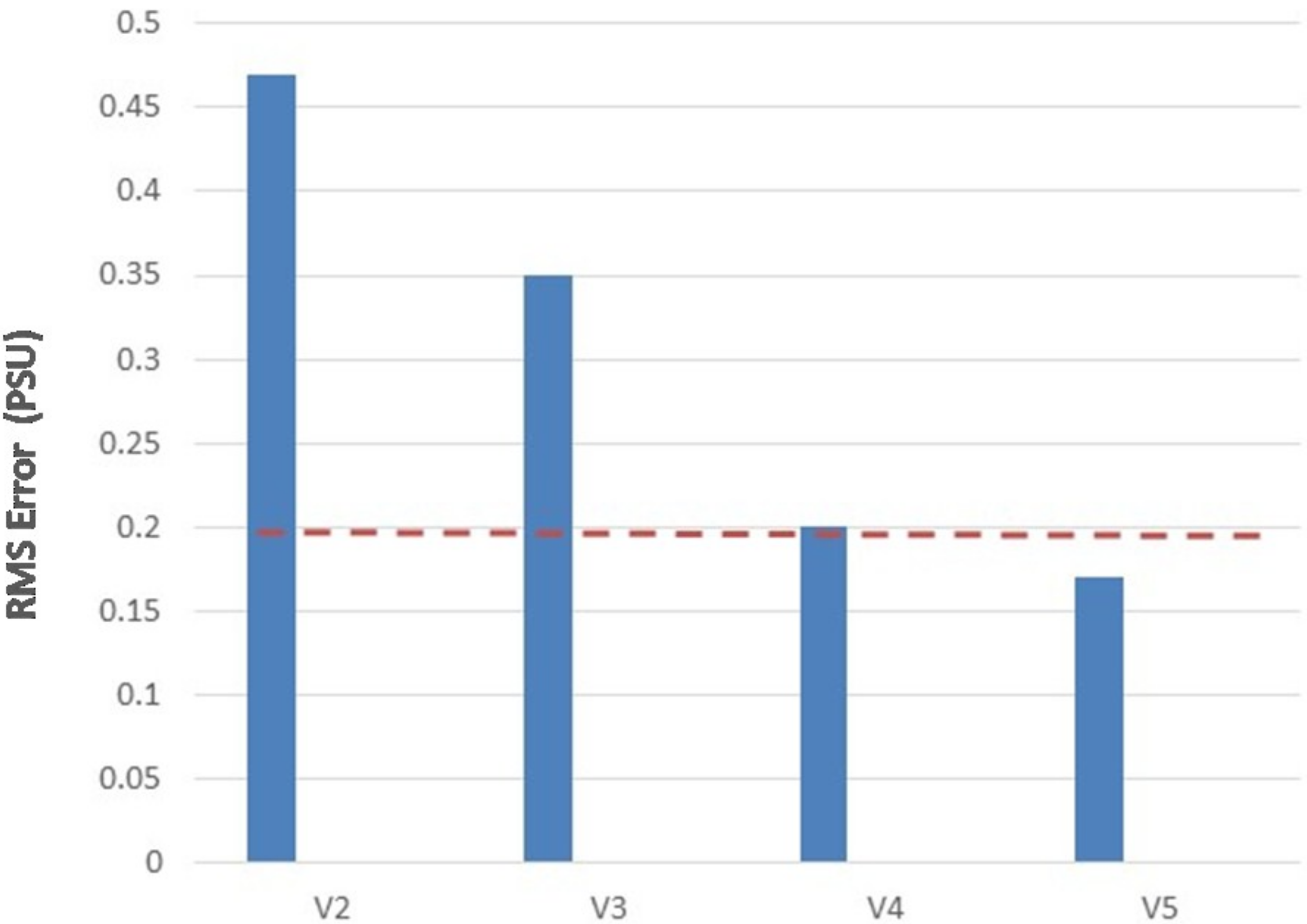
3.2. Evaluation of the Version 5.0 Salinity
3.3. Work Remaining to Improve the Salinity Product
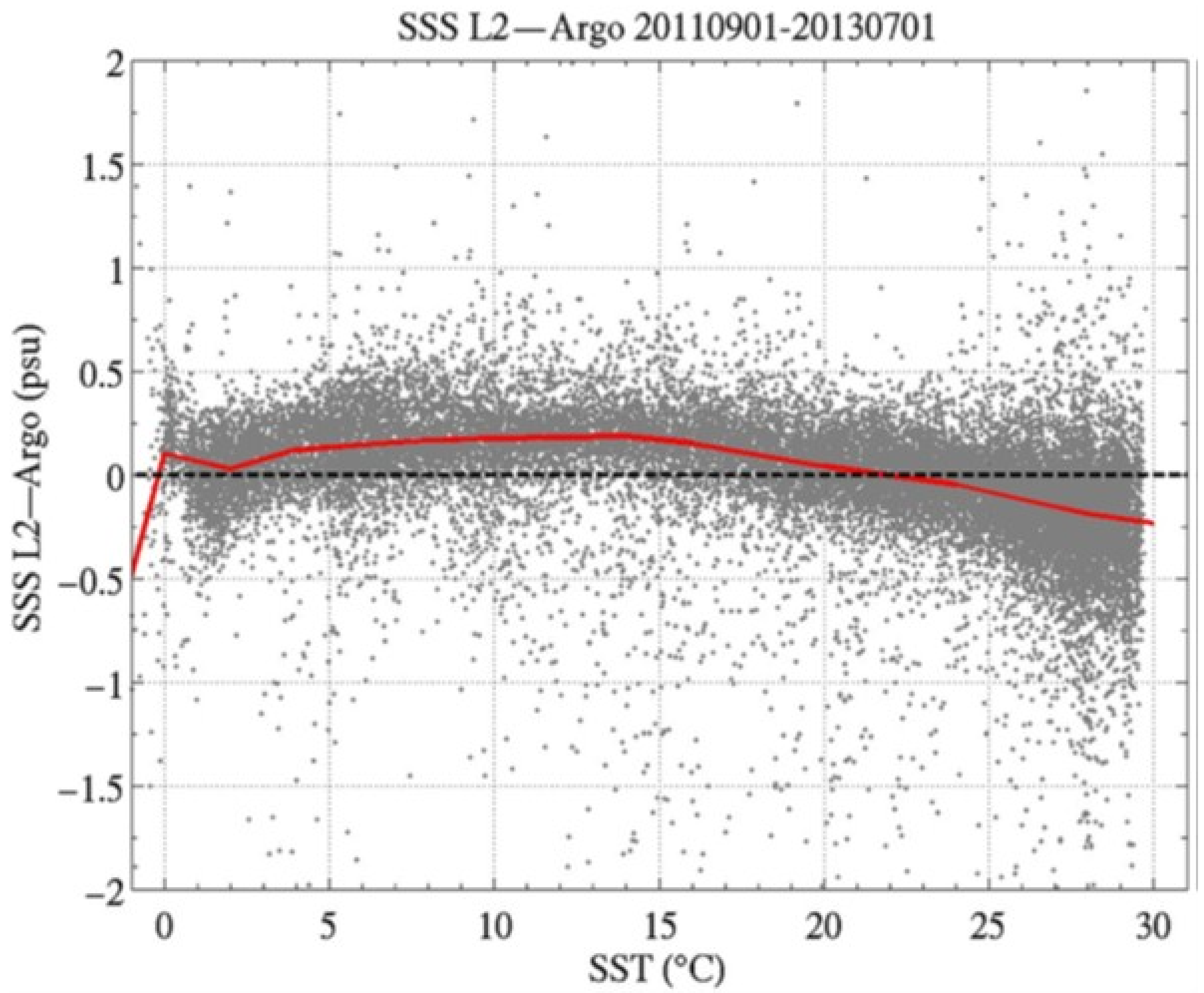
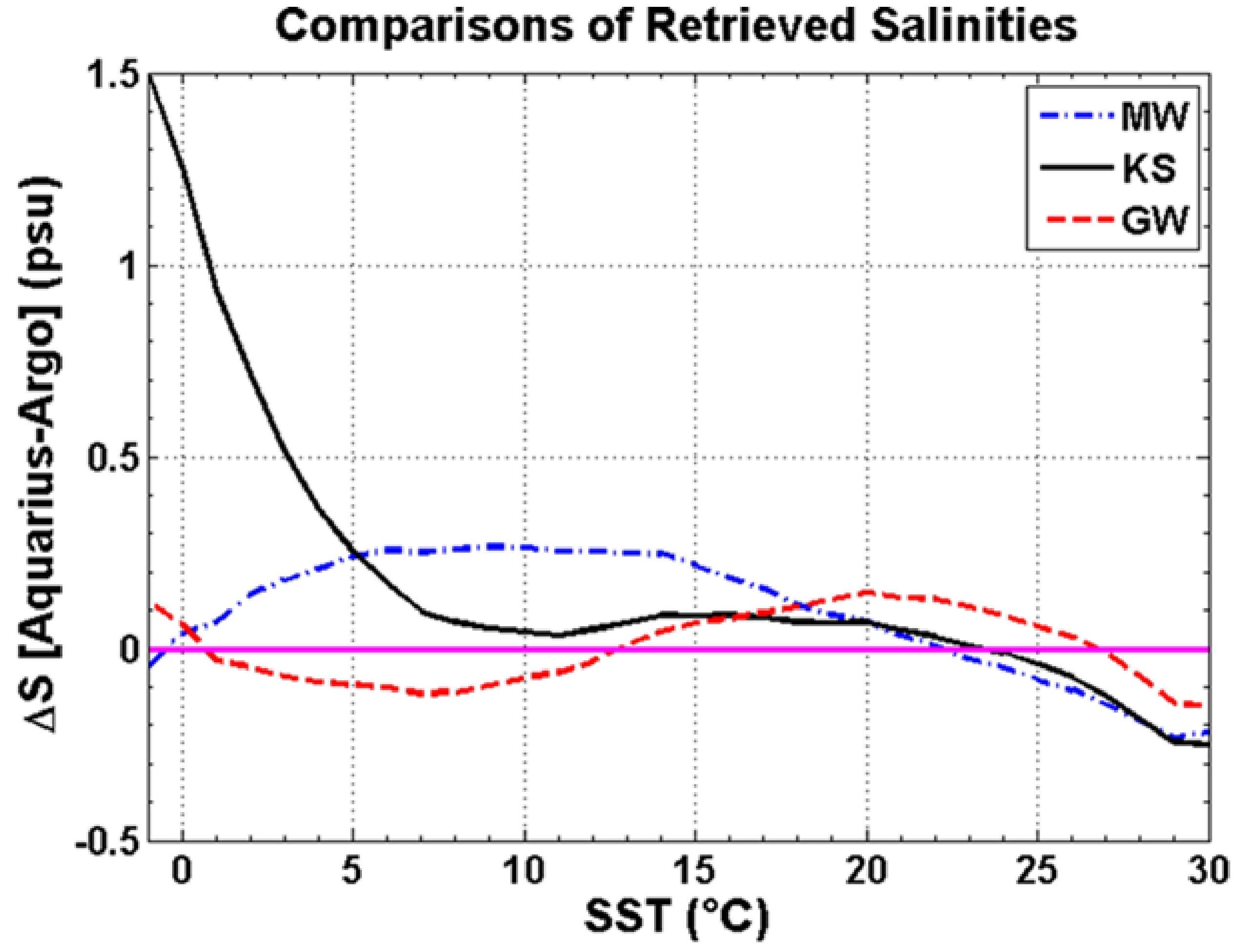
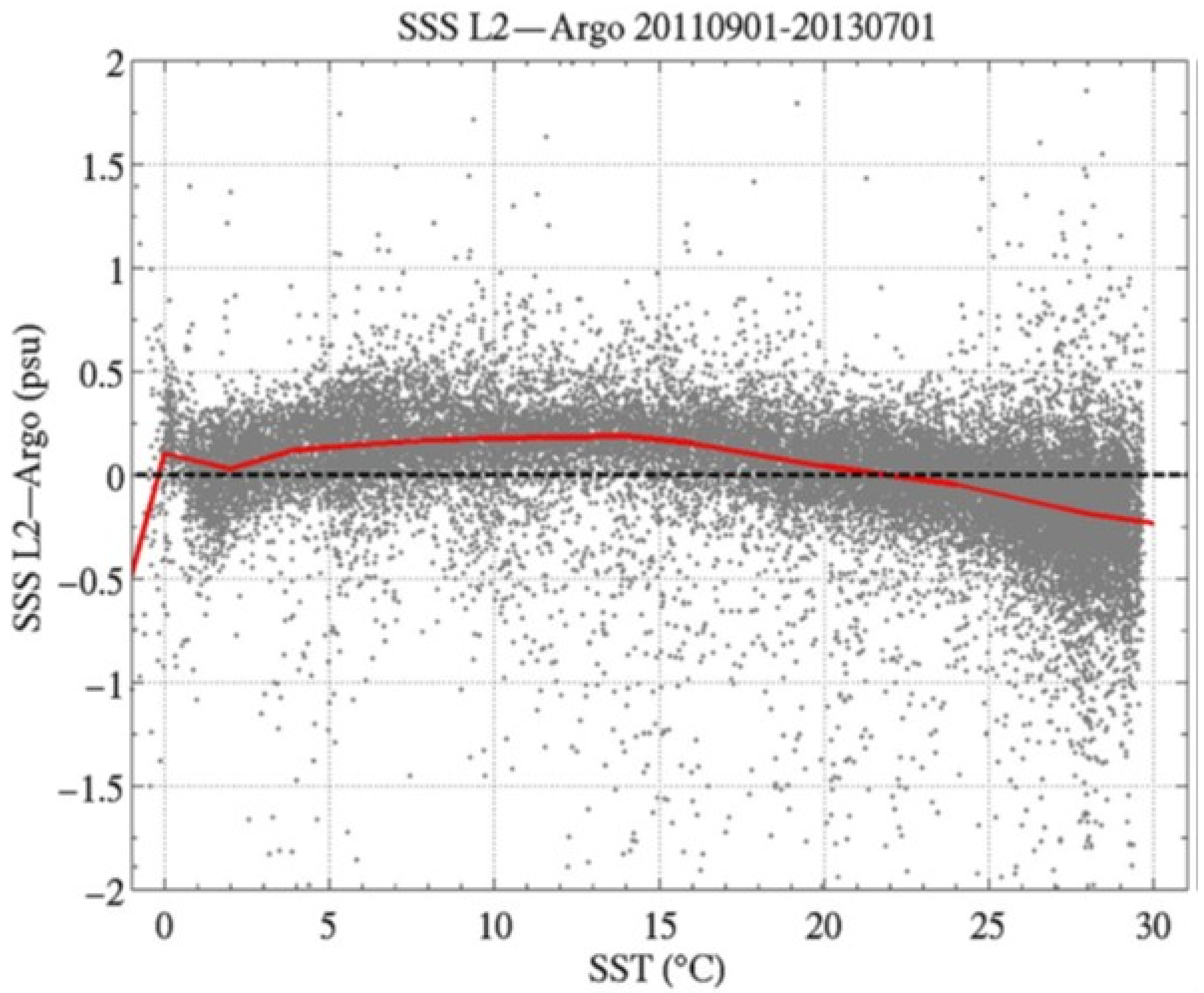
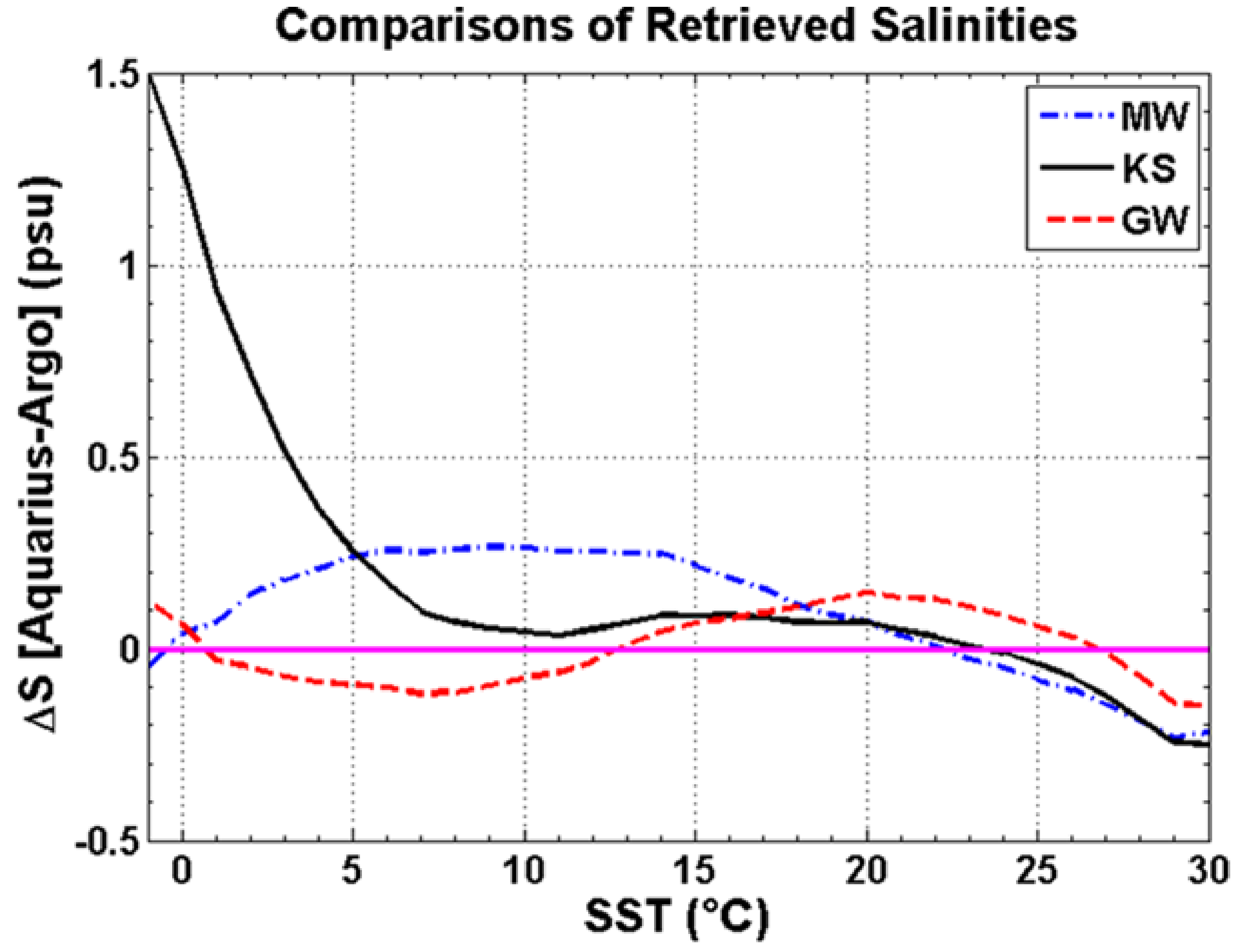
- Determining the physical reason for an SST-dependent bias (which is empirically removed in Version 5; See Section 4.3 below);
- Identifying and correcting a remaining small annual cycle (not due to changes in salinity);
- Merging Aquarius, SMOS, and SMAP salinity maps into a single product;
- Improving the theory for the effect of surface roughness on emission and the correction for the reflection of signals such as the galactic background;
- Improving the level of missed detection in the RFI algorithm;
- Improving the performance in cold water;
- Addressing regional biases (e.g., North Pacific and southern Indian Ocean);
- Improving calibration over the full range of expected targets (i.e., cold sky, ocean, and land).
4. Discussion: Remaining Issues
4.1. Background
4.1.1. Calibration
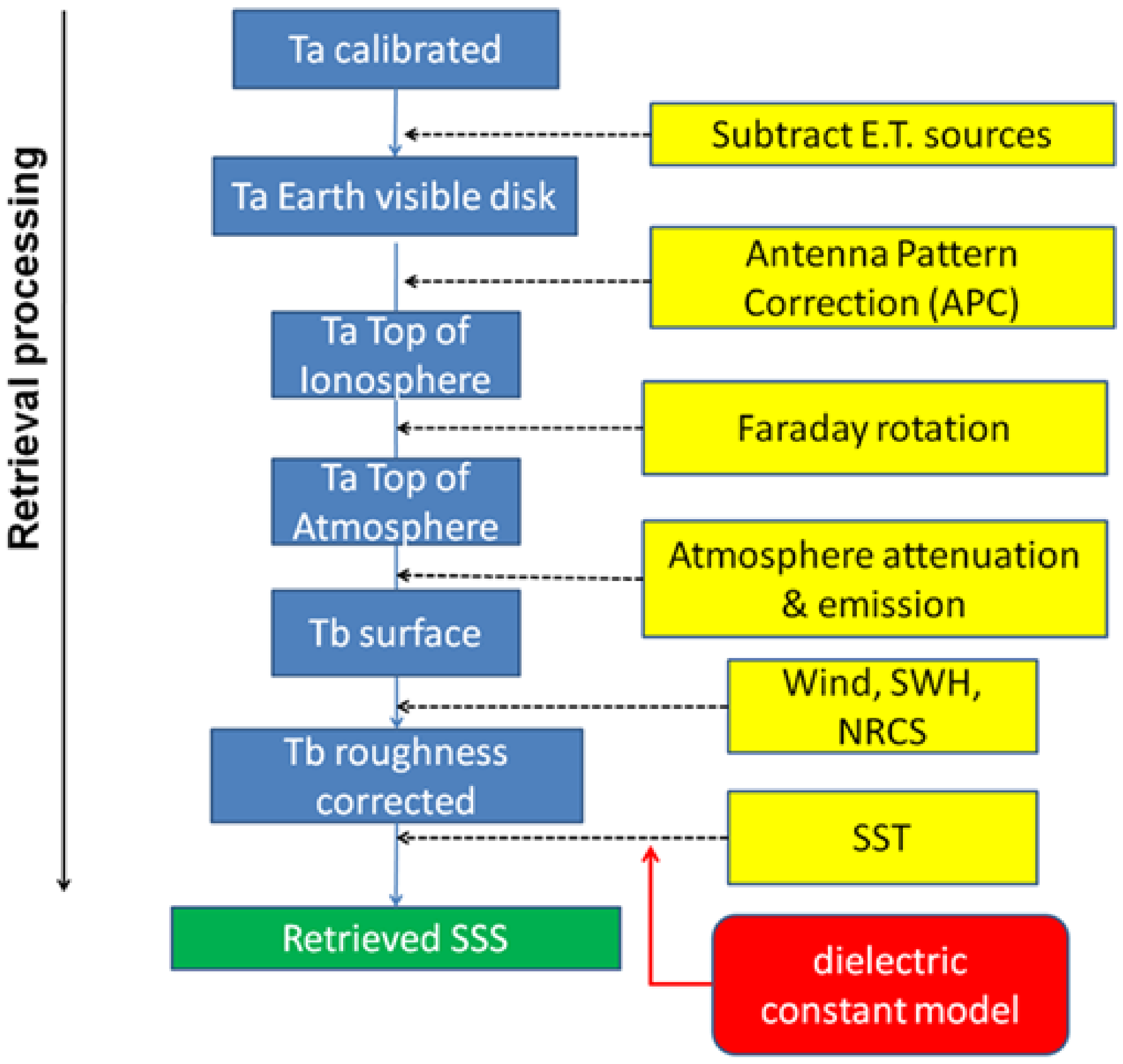
4.1.2. Retrieval of Salinity
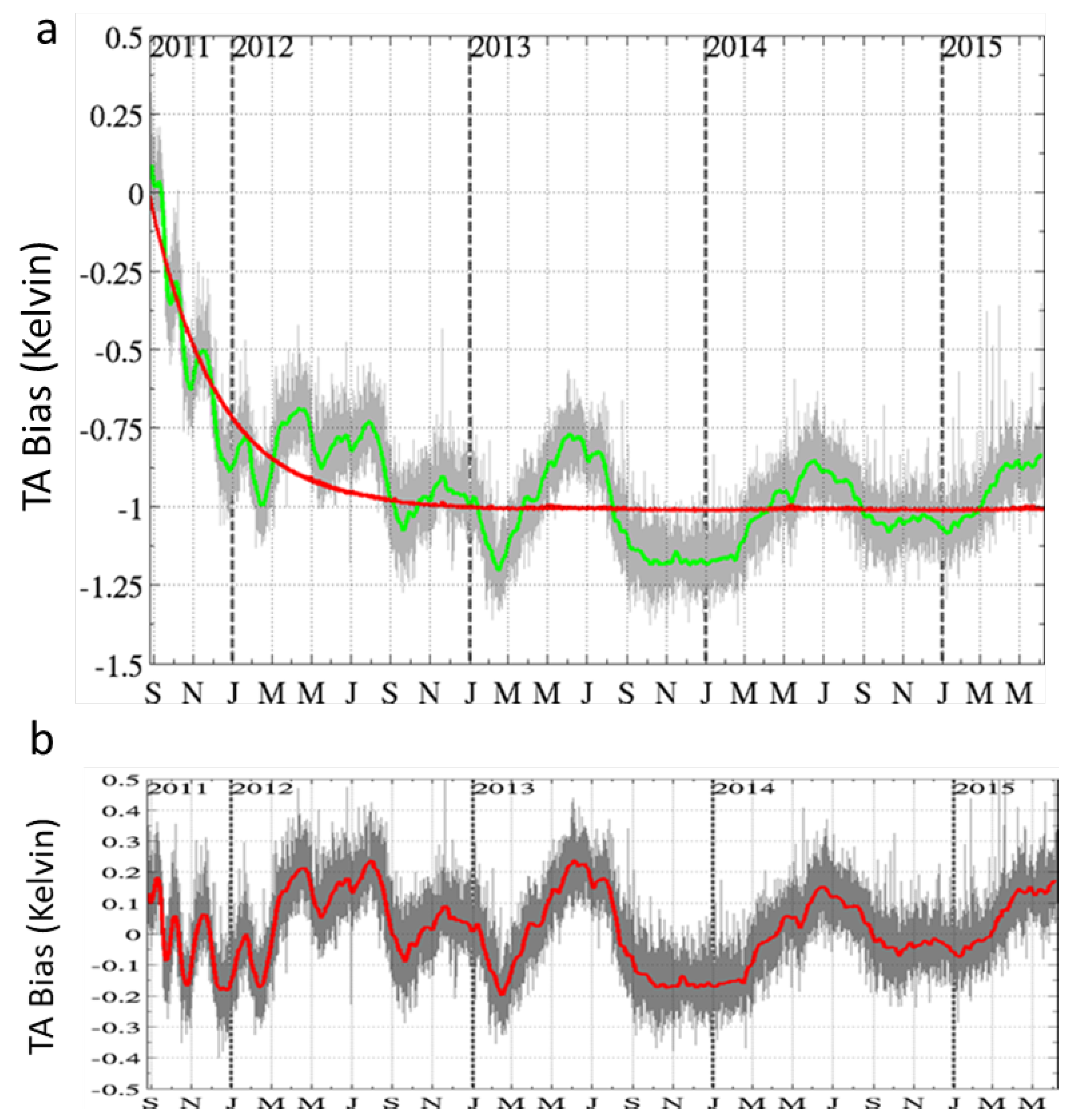
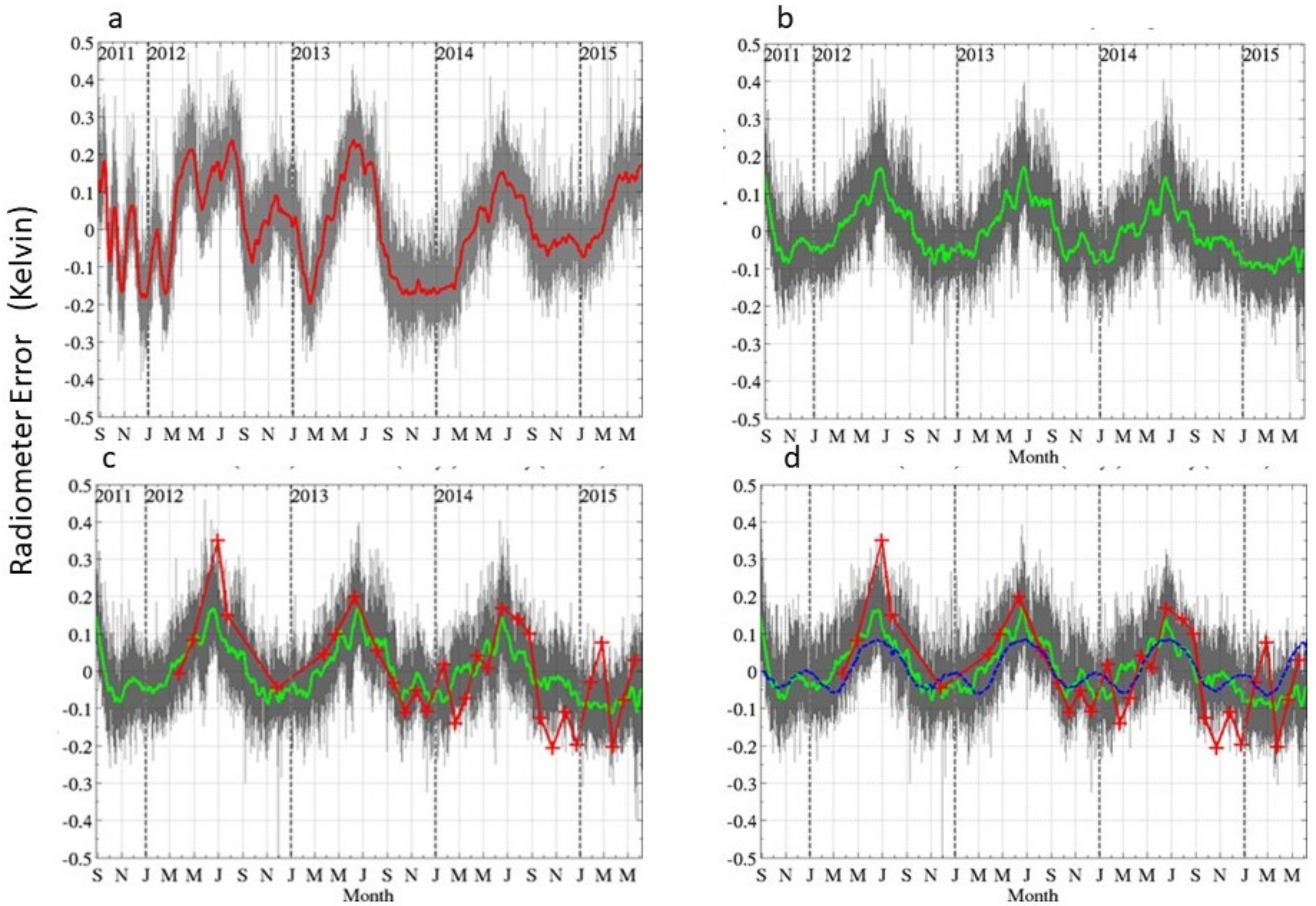
4.2. Example Issue: Drift and Wiggles
4.3. Example Issue: SST Dependence
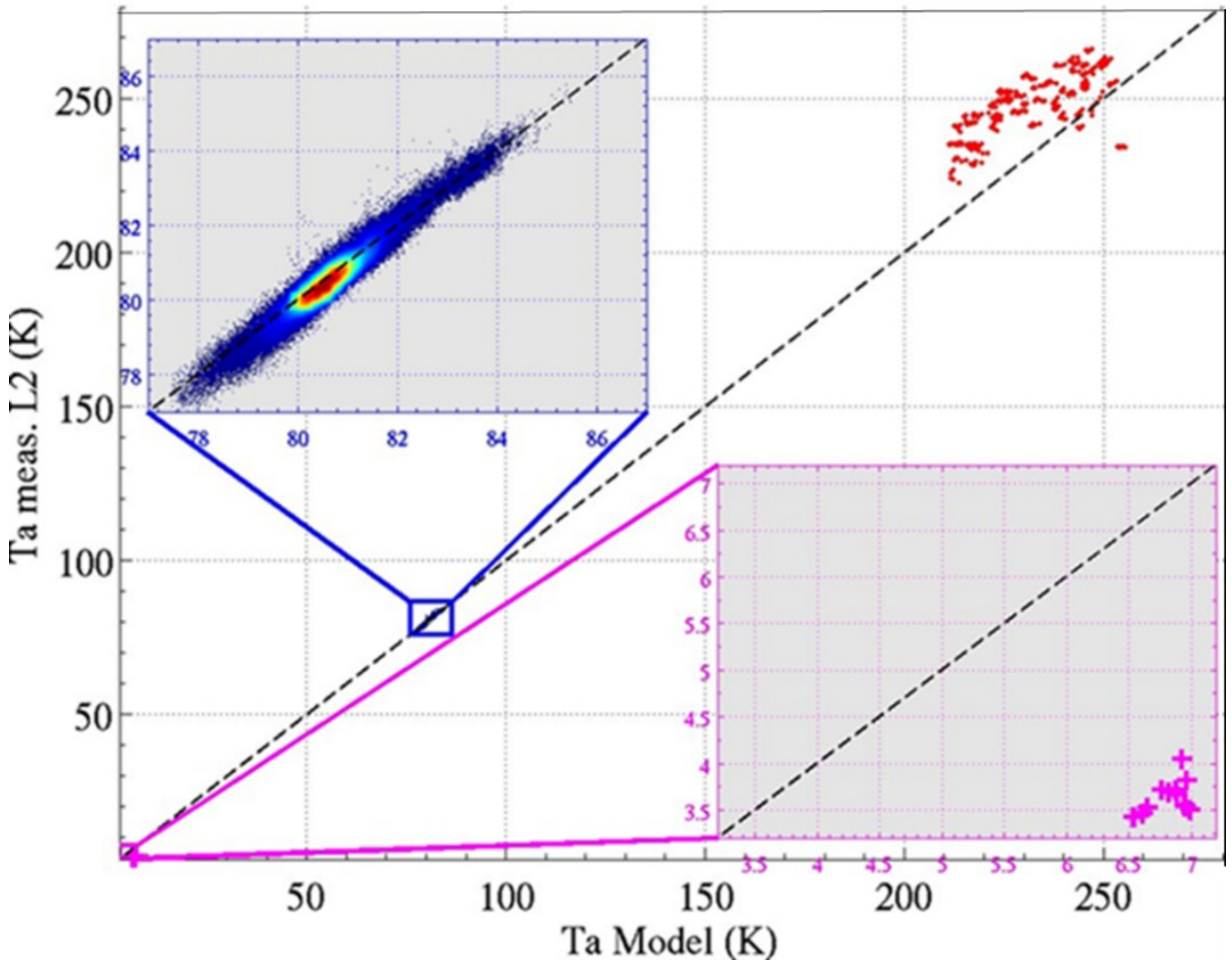
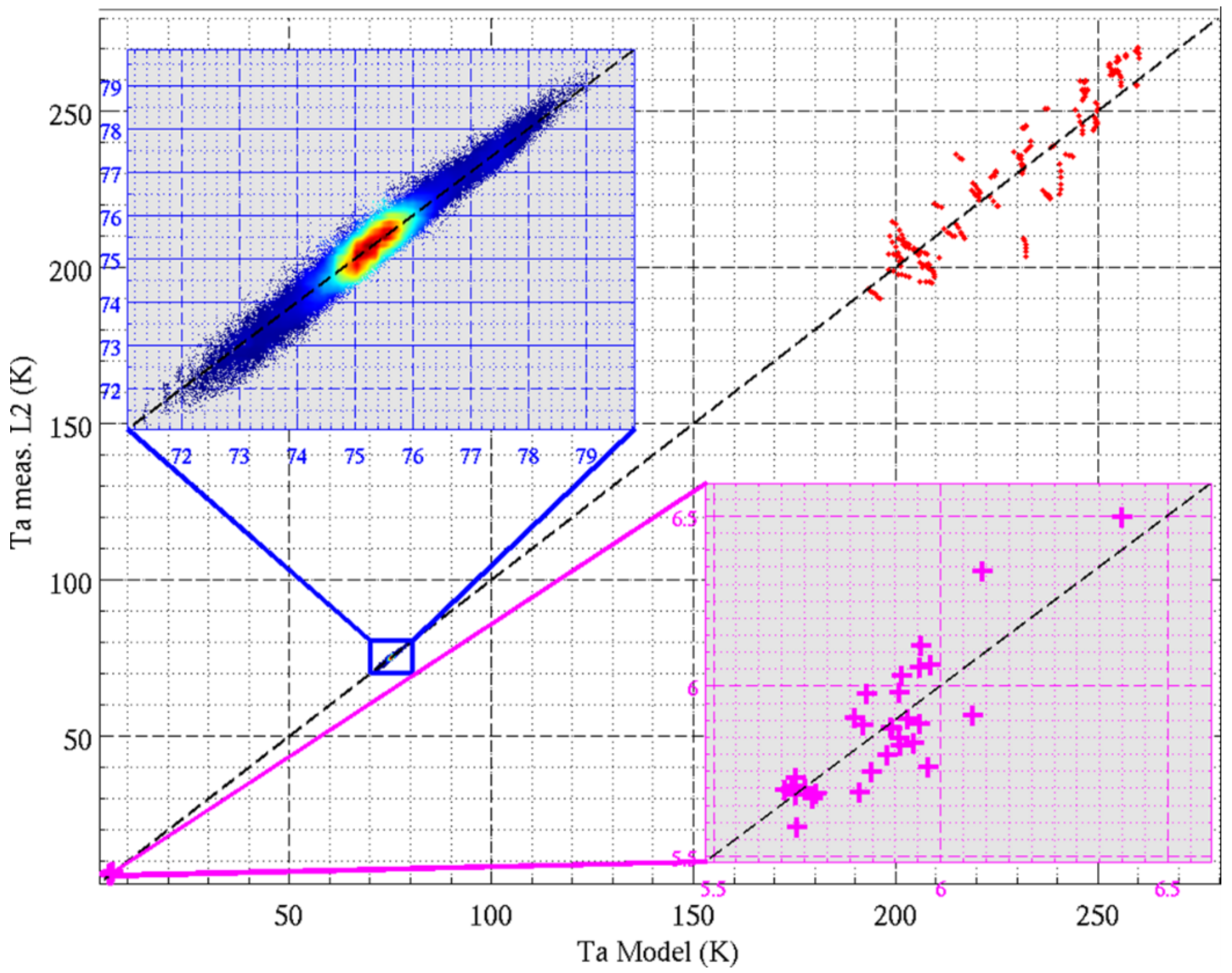
4.4. Example Issue: Whole Range Calibration
4.4.1. Introduction
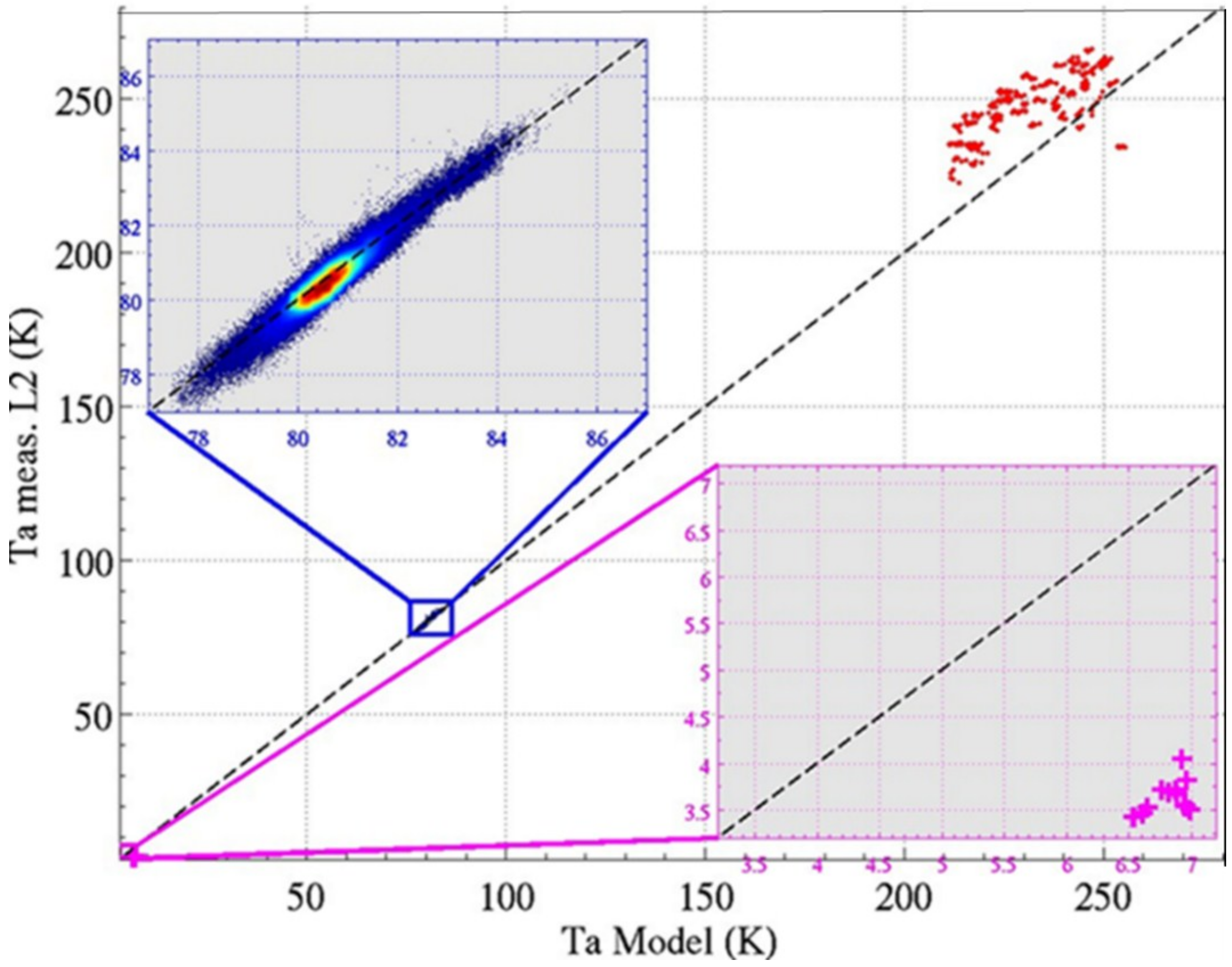
4.4.2. Whole Range Calibration V5.WR
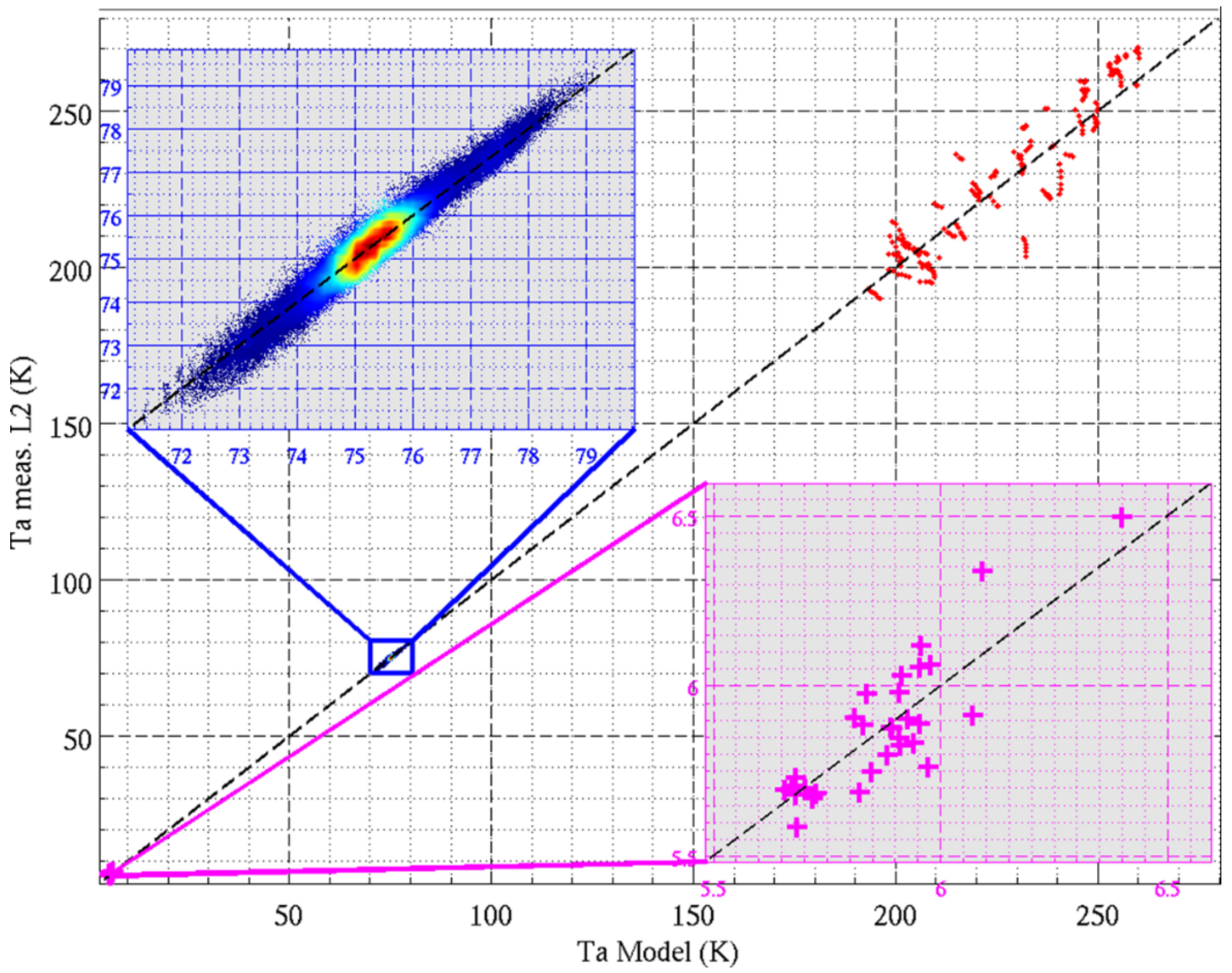
- At the cold end, using the difference between the mean of the TA measured by Aquarius for the 30 cold sky calibrations and the mean of the corresponding TA_expected for the cold sky look computed from radiative transport theory;
- Over the ocean, using the mean of the TA measured by Aquarius globally for the year 2012 (filtered for RFI, and with a water fraction of ≥99.9% ) and the mean of the corresponding TA_expected.
5. Conclusions: Future of SSS Remote Sensing
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Meissner, T.; Wentz, F.; Le Vine, D.M. Aquarius Salinity Retrieval Algorithm: End of Mission Algorithm Theoretical Basis Document (ATBD). RSS Tech. Rep. 2017, 120117. [Google Scholar]
- Meissner, T.; Wentz, F.J.; Le Vine, D.M. The Salinity Retrieval Algorithm for the NASA Aquarius Version 5 and SMAP Version 3 Releases. Remote Sens. 2018, 10, 1121. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Lagerloef, G.S.E.; Colomb, F.R.; Yueh, S.H.; Pellerano, F.A. Aquarius: An instrument to monitor sea surface salinity from space. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2040–2050. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Dinnat, E.P.; Meissner, T.; Yueh, S.H.; Wentz, F.J.; Torrusio, S.E.; Lagerloef, G. Status of Aquarius/SAC-D and Aquarius Salinity Retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5401–5415. [Google Scholar] [CrossRef]
- Yueh, S.H.; West, R.; Wilson, W.J.; Li, F.K.; Njoku, E.G.; Rahmat-Samii, Y. Error sources and feasibility for microwave remote sensing of ocean surface salinity. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1049–1060. [Google Scholar] [CrossRef]
- Yueh, S.H. Estimates of Faraday rotation with passive microwave polarimetry for microwave remote sensing of Earth surfaces. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2434–2438. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Abraham, S.; Utku, C.; Dinnat, E.P. Aquarius third stokes parameter measurements: Initial results. IEEE Geosci. Remote Sens. Lett. 2013, 10, 520–524. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Abraham, S. The effect of the ionosphere on remote sensing of sea surface salinity from space: Absorption and emission at L band. IEEE Trans. Geosci. Remote Sens. 2002, 40, 771–782. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Lagerloef, G.S.E.; Ruf, C.; Wentz, F.; Yueh, S.; Piepmeier, J.; Lindstrom, E.; Dinnat, E. Aquarius: The instrument and initial results. In Proceedings of the 12th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment (MicroRad), Rome, Italy, 5–9 March 2012. [Google Scholar]
- Wilson, W.J.; Tanner, A.; Pellerano, F.; Horgan, K. Ultrastable radiometers for future sea surface salinity missions. JPL Rep. 2005, D-31794. [Google Scholar]
- Pellerano, F.A.; Piepmeier, J.; Triesky, M.; Horgan, K.; Forgione, J.; Caldwell, J.; Wilson, W.J.; Yueh, S.; Spencer, M.; McWatters, D.; et al. The {A}quarius Ocean Salinity Mission High Stability {L-band} Radiometer. In Proceedings of the IEEE International Conference on Geoscience and Remote Sensing Symposium, Denver, CO, USA, 31 July–4 August 2006; pp. 1681–1684. [Google Scholar]
- Le Vine, D.M. ESTAR experience with RFI at L-band and implications for future passive microwave remote sensing from space. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; pp. 847–849. [Google Scholar]
- Skou, N.; Misra, S.; Balling, J.E.; Kristensen, S.S.; Sobjaerg, S.S. L-band RFI as experienced during airborne campaigns in preparation for SMOS. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1398–1407. [Google Scholar] [CrossRef] [Green Version]
- Piepmeier, J.R.; Pellerano, F.A.; Freedman, A. Aquarius L-Band Microwave Radiometer: 3 Years of Radiometric Performance and Systematic Effects. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2006, 8, 5416–5423. [Google Scholar] [CrossRef]
- de Matthaeis, P.; Peng, J.; Piepmeier, J.; Le Vine, D. Overview of Aquarius Radiometer Post-Launch Measturement Counts to Antenna Temperature Processing for Product Version 5. AQ-014-PS-0029, 2018. [Google Scholar]
- Aquarius Project, “ATBD History. Available online: https://podaac.jpl.nasa.gov/aquarius, December 31, 2017 (accessed on 1 October 2018).
- Meissner, T.; Wentz, F.J.; Scott, J.; Vazquez-Cuervo, J. Sensitivity of Ocean Surface Salinity Measurements From Spaceborne L-Band Radiometers to Ancillary Sea Surface Temperature. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7105–7111. [Google Scholar] [CrossRef]
- Liebe, H.J.; Rosenkranz, P.W.; Hufford, G.A. Atmospheric {60-GHz} oxygen spectrum: New laboratory measurements and line parameters. J. Quant. Spectrosc. Radiat. Transf. 1992, 48, 629–643. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.J.; Ricciardulli, L. The emission and scattering of L-band microwave radiation from rough ocean surfaces and wind speed measurements from the Aquarius sensor. J. Geophys. Res. C Ocean. 2014, 119, 6499–6522. [Google Scholar] [CrossRef] [Green Version]
- Boutin, J.; Chao, Y.; Asher, W.E.; Delcroix, T.; Drucker, R.; Drushka, K.; Kolodziejczyk, N.; Lee, T.; Reul, N.; Reverdin, G.; et al. Satellite and In Situ Salinity: Understanding Near-Surface Stratification and Subfootprint Variability. Bull. Amer. Meteor. Soc. 2016, 97, 1391–1407. [Google Scholar] [CrossRef] [Green Version]
- Roemmich, D.; Johnson, G.; Riser, S.; Davis, R.; Gilson, J.; Owens, W.B.; Garzoli, S.; Schmid, C.; Ignaszewski, M. The Argo Program: Observing the Global Oceans with Profiling Floats. Oceanography 2009, 22, 34–43. [Google Scholar] [CrossRef] [Green Version]
- Kao, H.-Y.; Lagerloef, G.; Lee, T.; Melnichenko, O.; Hacker, P. Aquarius Salinity Validation Analysis. AQ-014-PS-0016. 28 February 2018. [Google Scholar]
- Chassignet, E.P.; Hurlburt, H.E.; Smedstad, O.M.; Halliwell, G.R.; Hogan, P.J.; Wallcraft, A.J.; Baraille, R.; Bleck, R. The HYCOM (HYbrid Coordinate Ocean Model) data assimilative system. J. Mar. Syst. 2007, 65, 60–83. [Google Scholar] [CrossRef] [Green Version]
- Lee, T. Consistency of Aquarius sea surface salinity with Argo products on various spatial and temporal scales. Geophys. Res. Lett. 2016, 43, 3857–3864. [Google Scholar] [CrossRef]
- Klein, L.A.; Swift, C.T. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE J. Ocean. Eng. 1977, AP-25, 104–111. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.J. The Emissivity of the Ocean Surface Between 6 and 90 GHz Over a Large Range of Wind Speeds and Earth Incidence Angles. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3004–3026. [Google Scholar] [CrossRef]
- Zhou, Y.; Lang, R.H.; Dinnat, E.P.; Le Vine, D.M. L-Band Model Function of the Dielectric Constant of Seawater. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6964–6974. [Google Scholar] [CrossRef]
- Wilson, W.J.; Yueh, S.H.; Dinardo, S.J.; Li, F.K. High-Stability L-Band Radiometer Measurements of Saltwater. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1829–1835. [Google Scholar] [CrossRef]
- Dinnat, E.P.; Le Vine, D.M.; Piepmeier, J.R.; Brown, S.T.; Hong, L. Aquarius L-band Radiometers Calibration Using Cold Sky Observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5433–5449. [Google Scholar] [CrossRef]
- Scripps Institution of Oceanography. Global gridded NetCDF Argo only dataset produced by optimal interpolation. Available online: http://apdrc.soest.ucsd.edu/Gridded_fields.html (accessed on 1 October 2018).
- Piepmeier, J.R.; Hong, L.; Pellerano, F.A. Aquarius L-Band Microwave Radiometer: 3 Years of Radiometric Performance and Systematic Effects. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5416–5423. [Google Scholar] [CrossRef]
- Misra, S. Enabling the Next Generation of Salinity, Sea Surface Temperature and Wind Meaurements from Space: Instrument Challenges. In Proceedings of the Global Ocean Salinity and Water Cycle Workshop, Woods Hole, MA, USA, 22–26 May 2017. [Google Scholar]
- Dinnat, E.P.; Le Vine, D.M. Impact of sun glint on salinity remote sensing: An example with the aquarius radiometer. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3137–3150. [Google Scholar] [CrossRef]
- Dinnat, E.P.; Boutin, J.; Yin, X.; Le Vine, D.; Waldteufel, P.; Vergely, J.-L. Comparison of SMOS and Aquarius sea surface salinity and analysis of possible causes for the differences. In Proceedings of the 2014 XXXIth URSI General Assembly and Scientific Symposium (URSI GASS), Beijing, China, 16–23 August 2014. [Google Scholar]
- Meissner, T.; Wentz, F.J. The complex dielectric constant of pure and sea water from microwave satellite observations. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1836–1849. [Google Scholar] [CrossRef] [Green Version]
- Lang, R.; Zhou, Y.; Dinnat, E.; Le Vine, D. The Dielectric Constant Model Function and Implications for Remote Sensing of Salinity. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3572–3574. [Google Scholar]
- Lang, R.; Zhou, Y.; Utku, C.; Le Vine, D. Accurate measurements of the dielectric constant of seawater at L band. Radio Sci. 2016, 51, 2–24. [Google Scholar] [CrossRef] [Green Version]
- Le Vine, D.M.; Lagerloef, G.S.E.; Torrusio, S.E. Aquarius and remote sensing of sea surface salinity from space. Proc. IEEE 2010, 98, 688–703. [Google Scholar] [CrossRef]
- Dinnat, E.P.; Le Vine, D.M.; Bindlish, R.; Piepmeier, J.R.; Brown, S.T. Aquarius whole range calibration: Celestial Sky, ocean, and land targets. In Proceedings of the 13th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment (MicroRad), Pasadena, CA, USA, 24–27 March 2014; pp. 192–196. [Google Scholar]
- Le Vine, D.M.; Dinnat, E.P. Whole Range Calibration: Version 5.WR. AQ-014-PS-0030; 28 February 2018. Available online: https://podaac.jpl.nasa.gov/aquarius (accessed on 1 October 2018).
- Dinnat, E.P.; Le Vine, D.M.; Hong, L. Aquaruius Final Release Product and Full Range Calibration of L-Band Radiometer. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS2018), Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Dinnat, E.; Le Vine, D.; Soldo, Y.; de Matthaeis, P. Theoretical algorithm for the retrieval of sea surface salinity from SMAP observations at L-band. In Proceedings of the 15th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment, Cambridge, MA, USA, 27–30 March 2018. [Google Scholar]
- Meissner, T.; Wentz, F.; Ricciardulli, L.; Mears, C.; Manaster, A. Ocean Surface Salinity and Wind Speed from the SMAP L-Band Radiometer. In Microwave Radiometry and Remote Sensing of the Earth’s Surface and Atmosphere; VSP: Rancho Cordova, CA, USA, 2018. [Google Scholar]
- Meissner, T.; Wentz, F. Remote Sensing Systems SMAP Ocean Surface Salinities Level 2C, Version 2.0 Validated Release; Remote Sensing Systems: Santa Rosa, CA, USA, 2016. [Google Scholar]
- Sabia, R. SMOS Pilot-Mission Exploitation Platform (PI-MEP): A Hub for Validation and Expolitation of ESA SMOS Sea Surface Salinity Data. In Proceedings of the Ocean Sciences Meeting, Portland, OR, USA, 11–16 February 2018. [Google Scholar]
- Dong, X.; Shi, J.; Zhang, S.; Liu, H.; Wang, Z.; Zhu, D.; Zuo, L.; Chen, C.; Chen, W. Prelminary design of water cycle observation mission (WCOM). In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3434–3437. [Google Scholar]
- Shi, J.; Dong, X.; Zhao, T.; Du, Y.; Liu, H.; Wang, Z.; Zhu, D.; Ji, D.; Xiong, C.; Jiang, L. The Water Cycle Observation Mission (WCOM): Overview. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3430–3433. [Google Scholar]
- Xu, X.; Yun, R.; Dong, X.; Zhu, D.; Yin, X.; Liu, H. Data Pre-Processing of MICAP (Microwave Imager Combined Active and Passive) Scatterometer. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4776–4779. [Google Scholar]
- Dinnat, E.; de Amici, G.; Le Vine, D.; Piepmeier, J. Next generation spaceborne instrument for monitoring ocean salinity with application to the coastal zone and cryosphere. In Proceedings of the 15th Specialist Meeting on Microwave Radiometry and Remote Sensing of the Environment, Cambridge, MA, USA, 27–30 March 2018. [Google Scholar]
- Brown, S. A Next Generation Spaceborne Ocean State Observatory: Surface Salinity, Temperature and Ocean Winds from Equator to Pole. In Proceedings of the Globasl Ocean Salinity and the Water Cycle Workshop, Woods Hole, MA, USA, 22–26 May 2017. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| V-Pol | H-Pol | |||
|---|---|---|---|---|
| Beam 1 | 1.003350568406014 | −3.592857280825468 | 1.007405352181248 | −6.595668007611077 |
| Beam 2 | 1.008337848581688 | −9.655610862597533 | 1.003498234086013 | −2.948722716952730 |
| Beam 3 | 1.017695610594212 | −2.233911609523380 | 1.001311195384693 | −1.075651639210478 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le Vine, D.M.; Dinnat, E.P.; Meissner, T.; Wentz, F.J.; Kao, H.-Y.; Lagerloef, G.; Lee, T. Status of Aquarius and Salinity Continuity. Remote Sens. 2018, 10, 1585. https://doi.org/10.3390/rs10101585
Le Vine DM, Dinnat EP, Meissner T, Wentz FJ, Kao H-Y, Lagerloef G, Lee T. Status of Aquarius and Salinity Continuity. Remote Sensing. 2018; 10(10):1585. https://doi.org/10.3390/rs10101585
Chicago/Turabian StyleLe Vine, David M., Emmanuel P. Dinnat, Thomas Meissner, Frank J. Wentz, Hsun-Ying Kao, Gary Lagerloef, and Tong Lee. 2018. "Status of Aquarius and Salinity Continuity" Remote Sensing 10, no. 10: 1585. https://doi.org/10.3390/rs10101585
APA StyleLe Vine, D. M., Dinnat, E. P., Meissner, T., Wentz, F. J., Kao, H.-Y., Lagerloef, G., & Lee, T. (2018). Status of Aquarius and Salinity Continuity. Remote Sensing, 10(10), 1585. https://doi.org/10.3390/rs10101585