Seismic Vibration Control of 3D Steel Frames with Irregular Plans Using Eccentrically Placed MR Dampers

Abstract
:1. Introduction
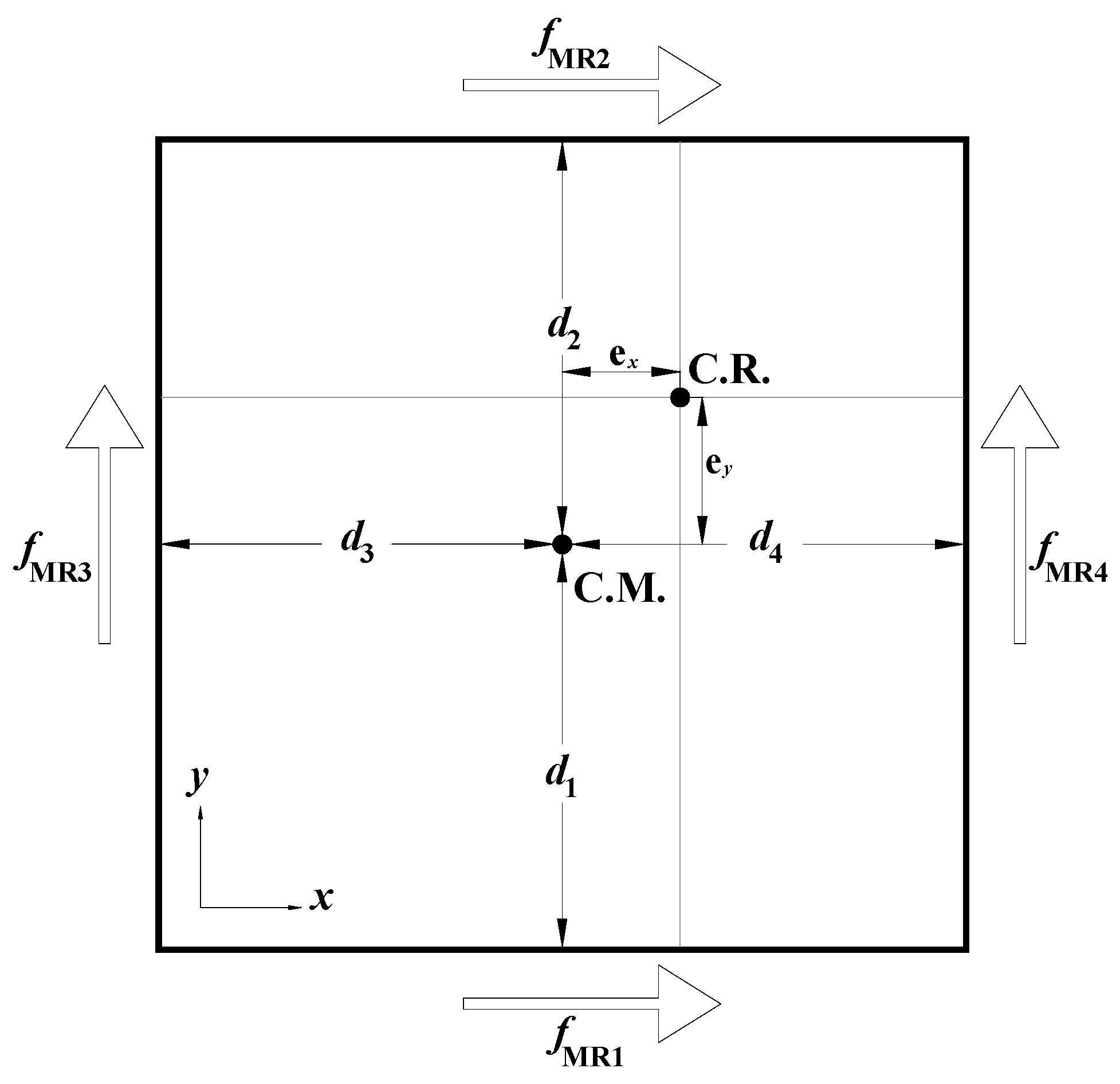
2. Governing Equations of Motion for the Controllable Building Using MR Dampers
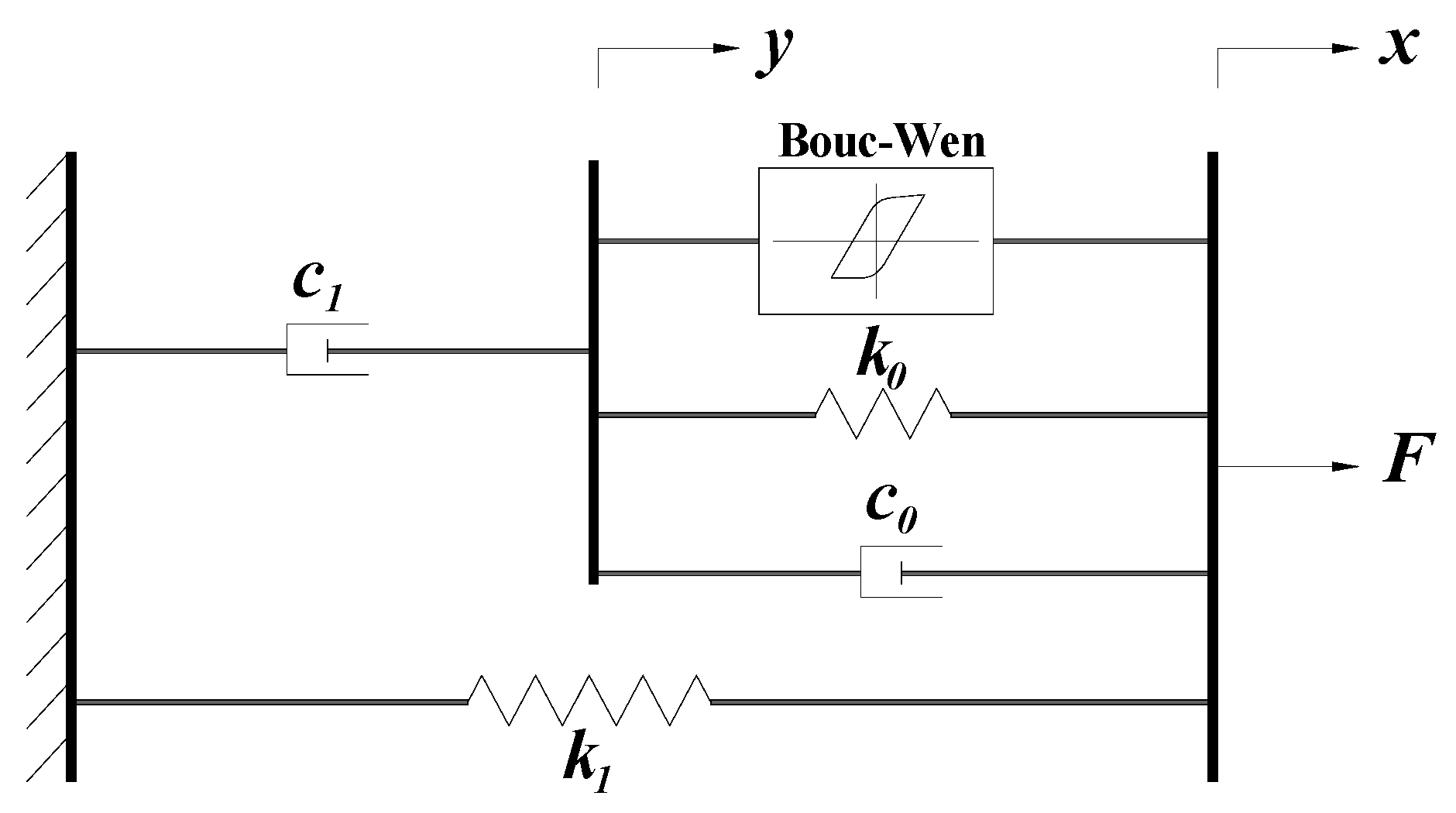
3. Magneto-Rheological (MR) Damper
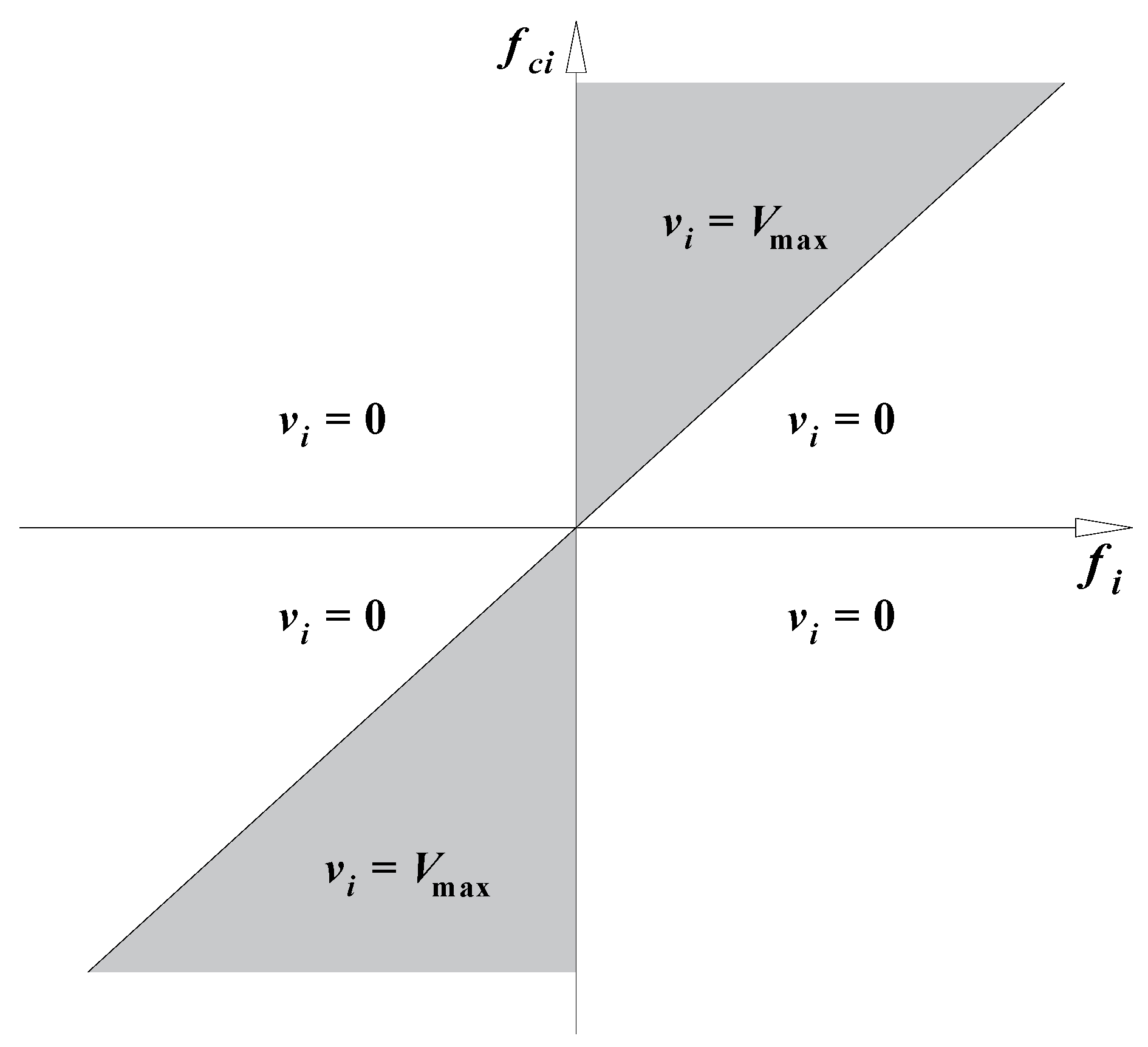
4. Active Control and Semi-Active Clipped Optimal Control Using LQR Algorithm
5. Passive Control Using MR Dampers
6. Numerical Studies
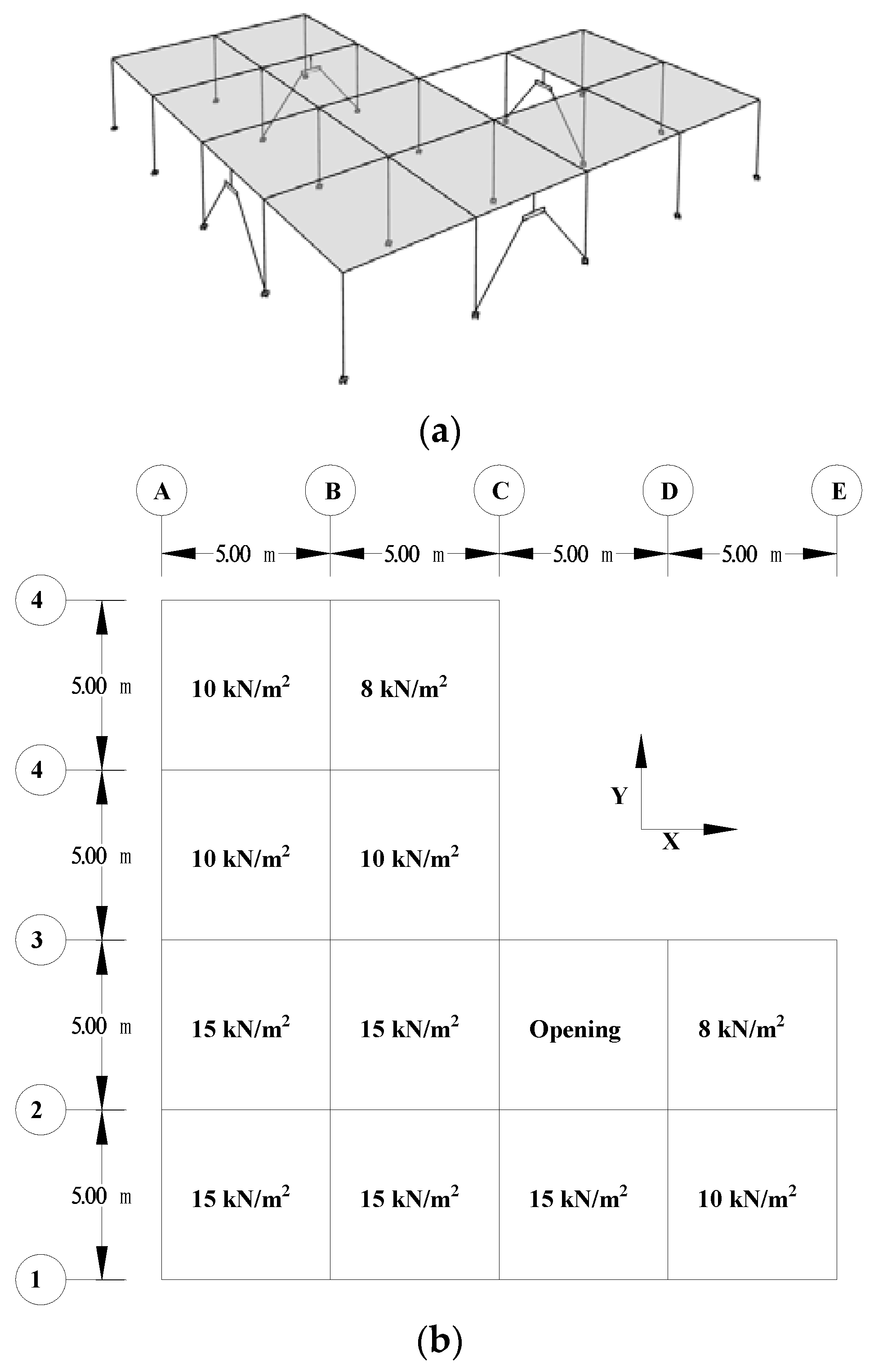
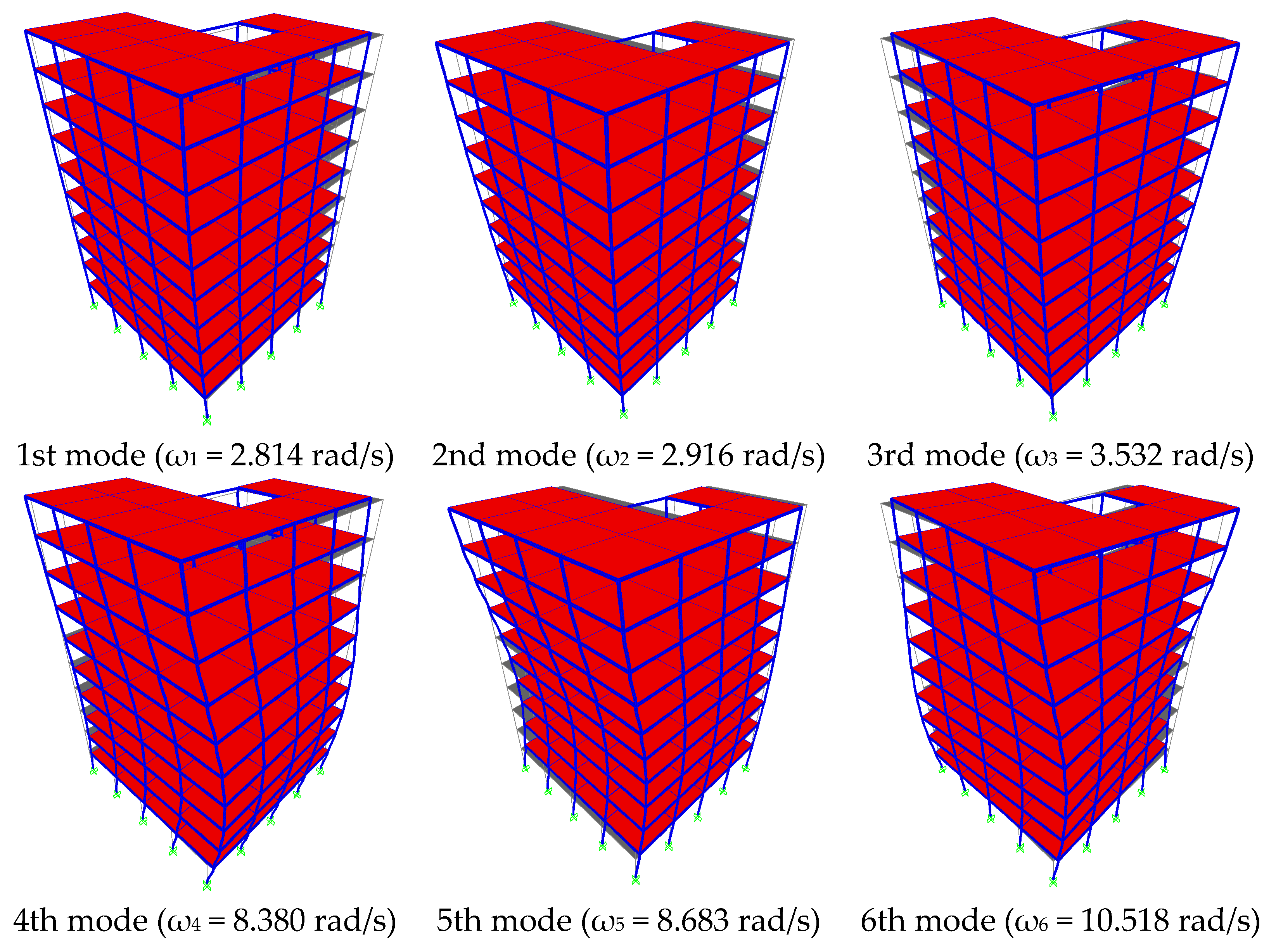
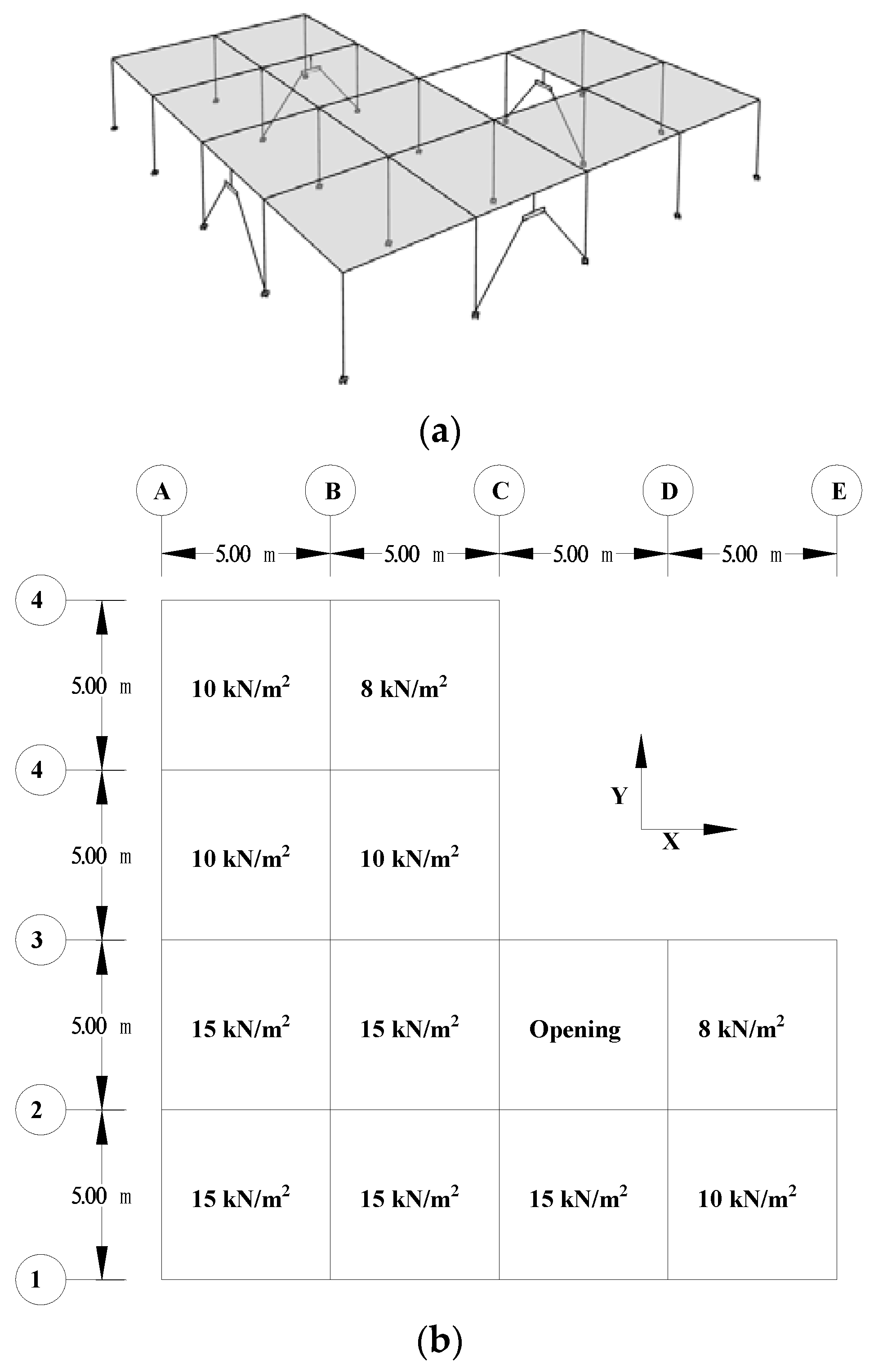
6.1. 10-Story Irregular Steel Moment Framed Building
- -
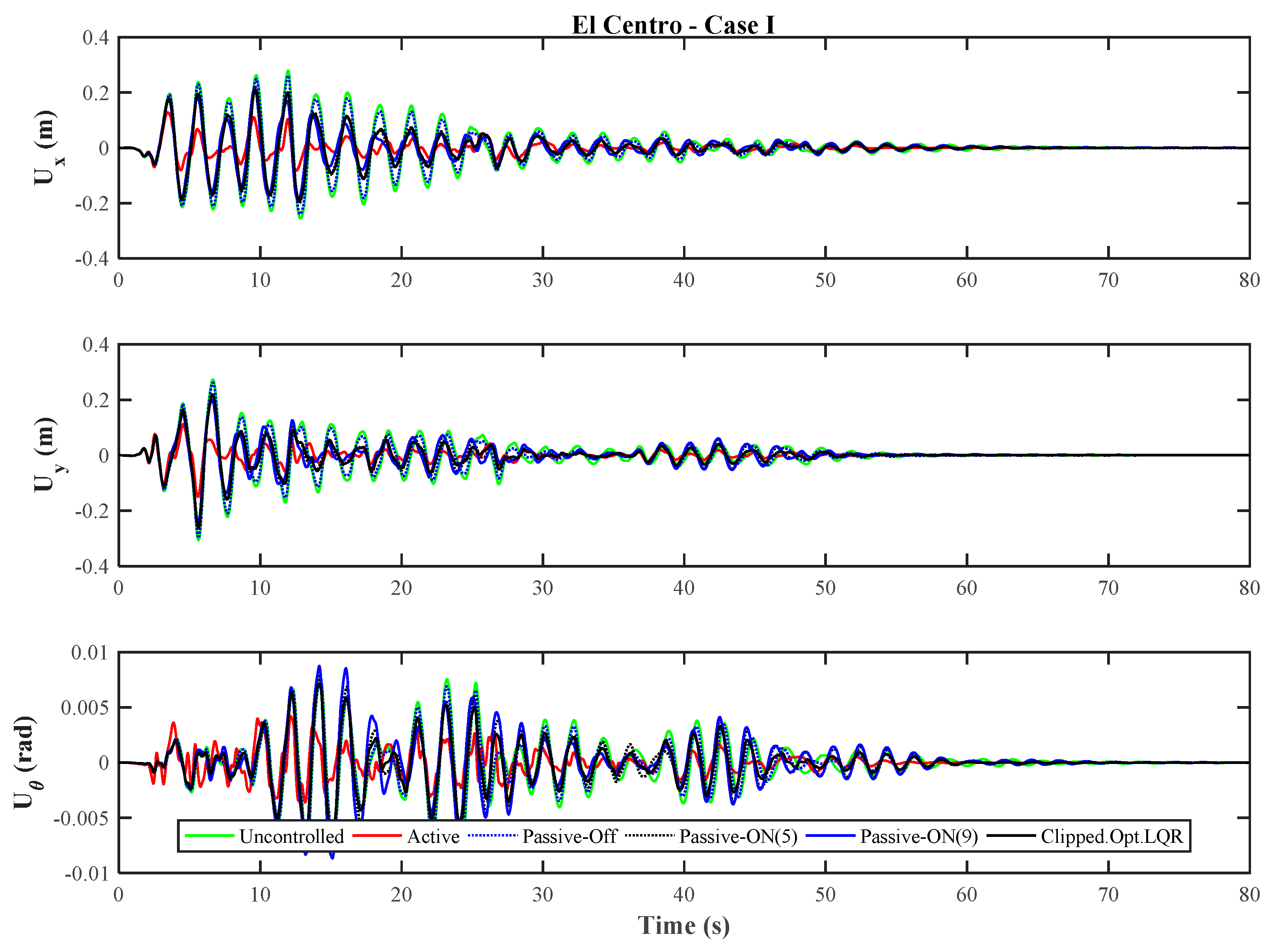
- Case I with dampers installed on the 1st floor;
- -
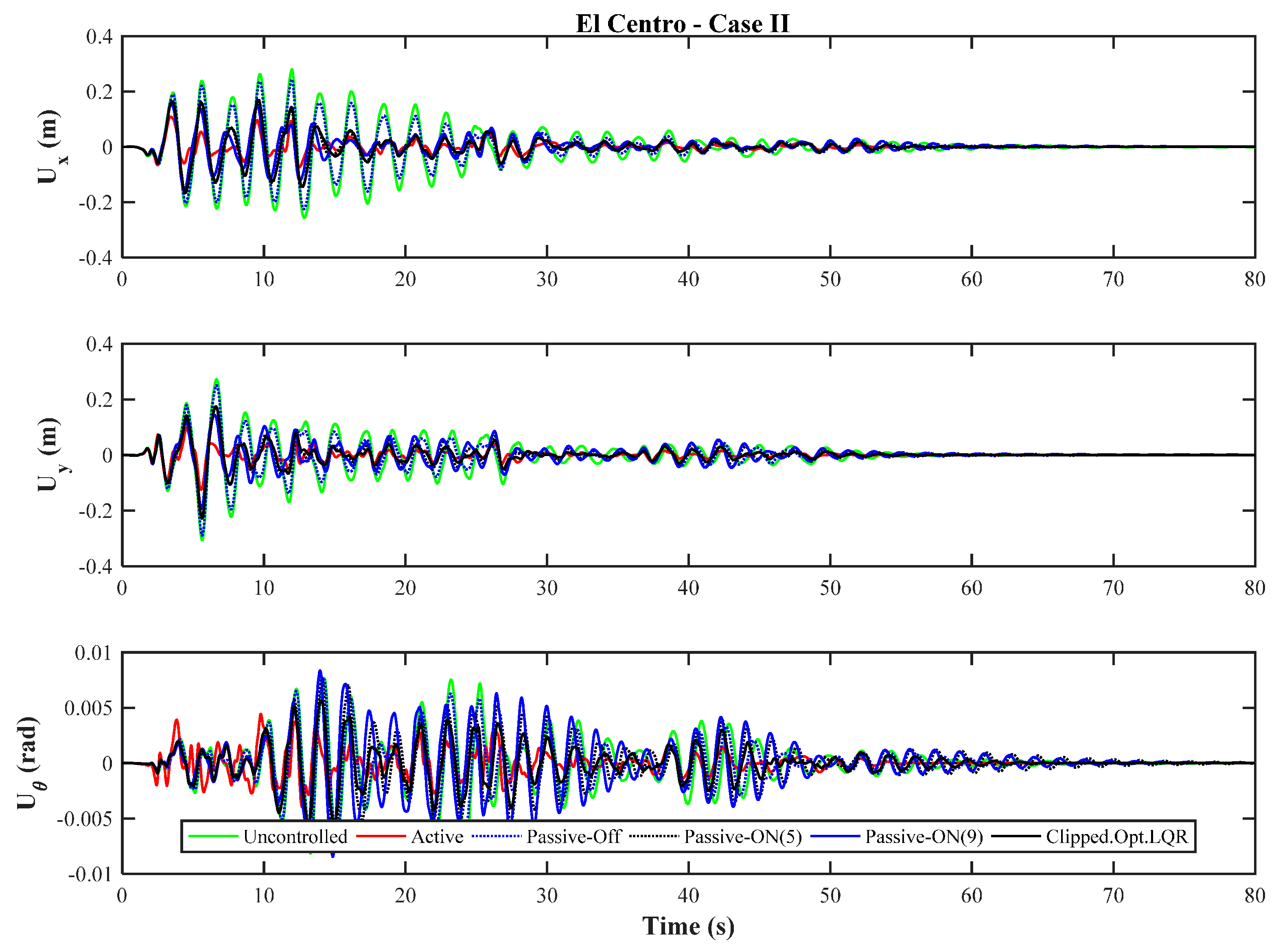
- Case II with dampers installed in 1st–2nd floors;
- -
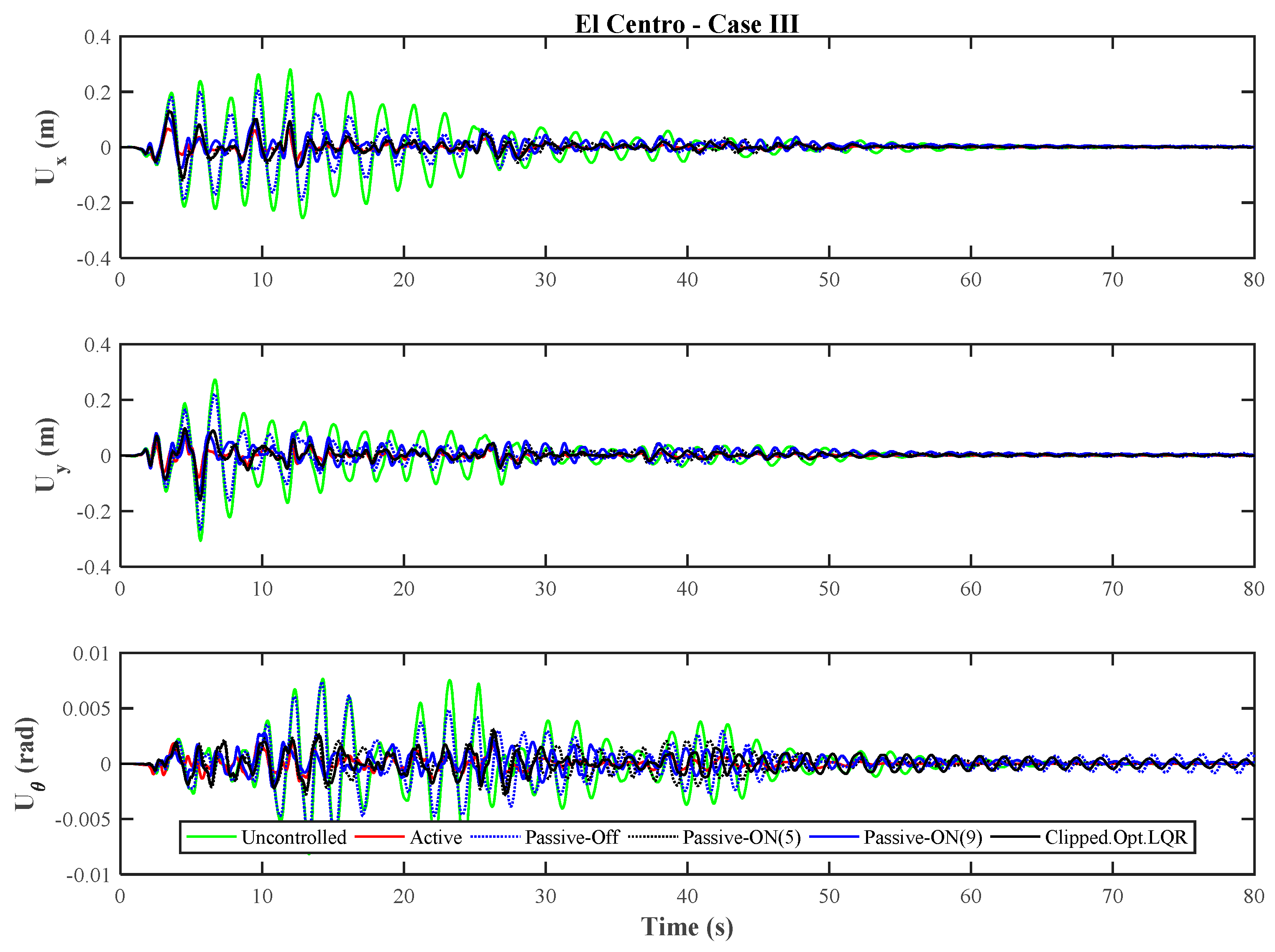
- Case III with dampers installed in 1st–5th floors;
- -
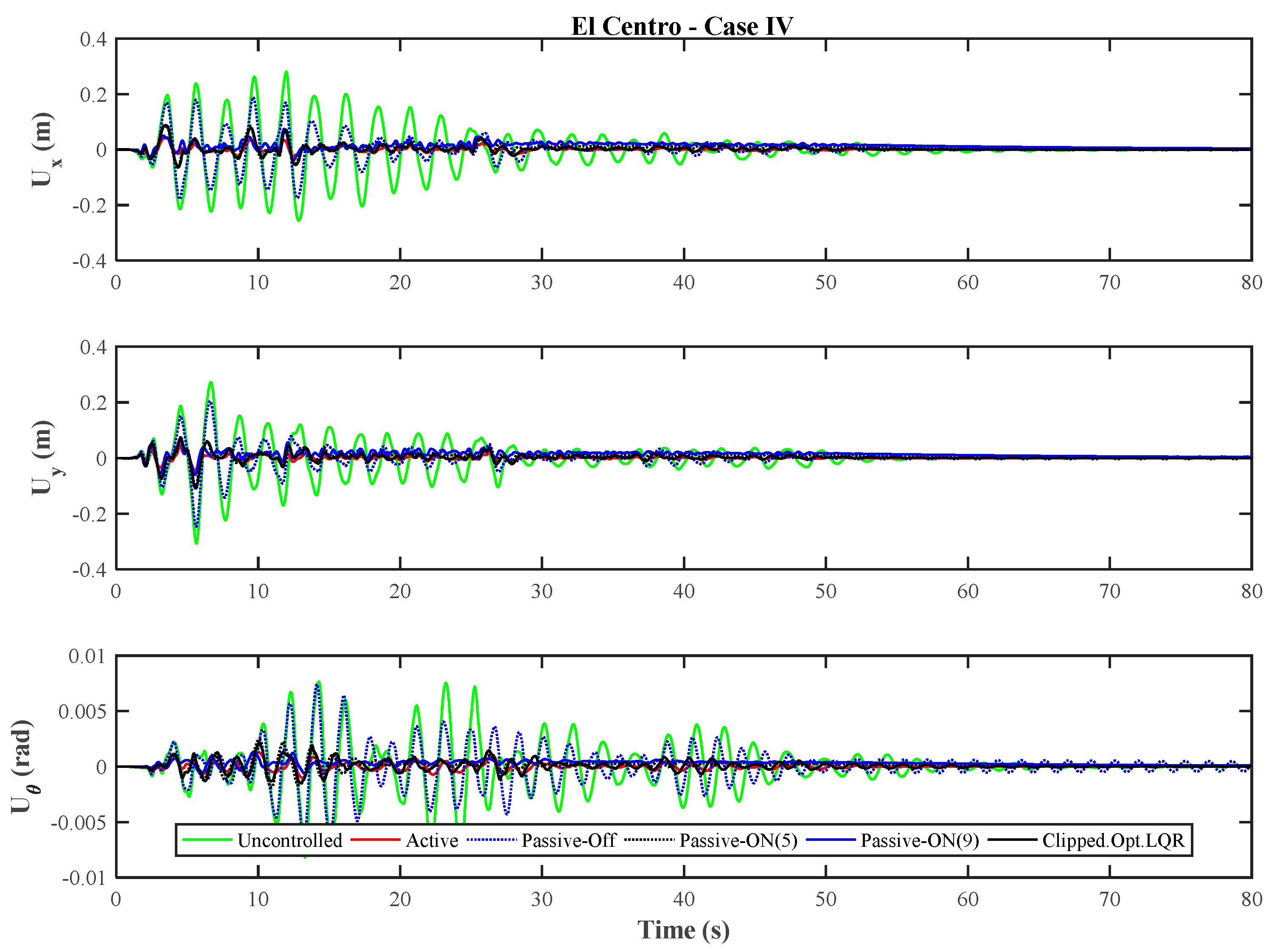
- Case IV with dampers installed in all stories.
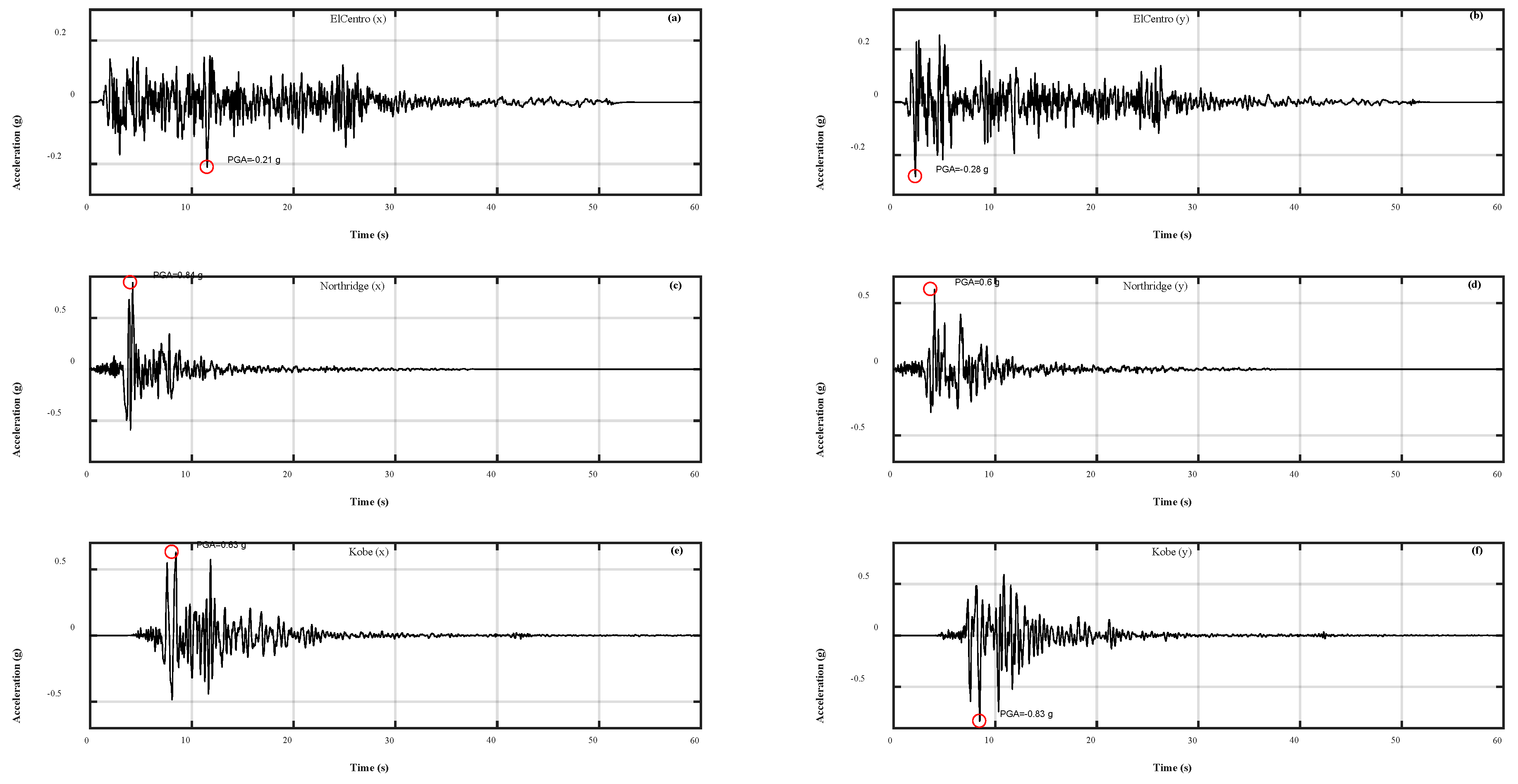
6.2. Earthquake Loads
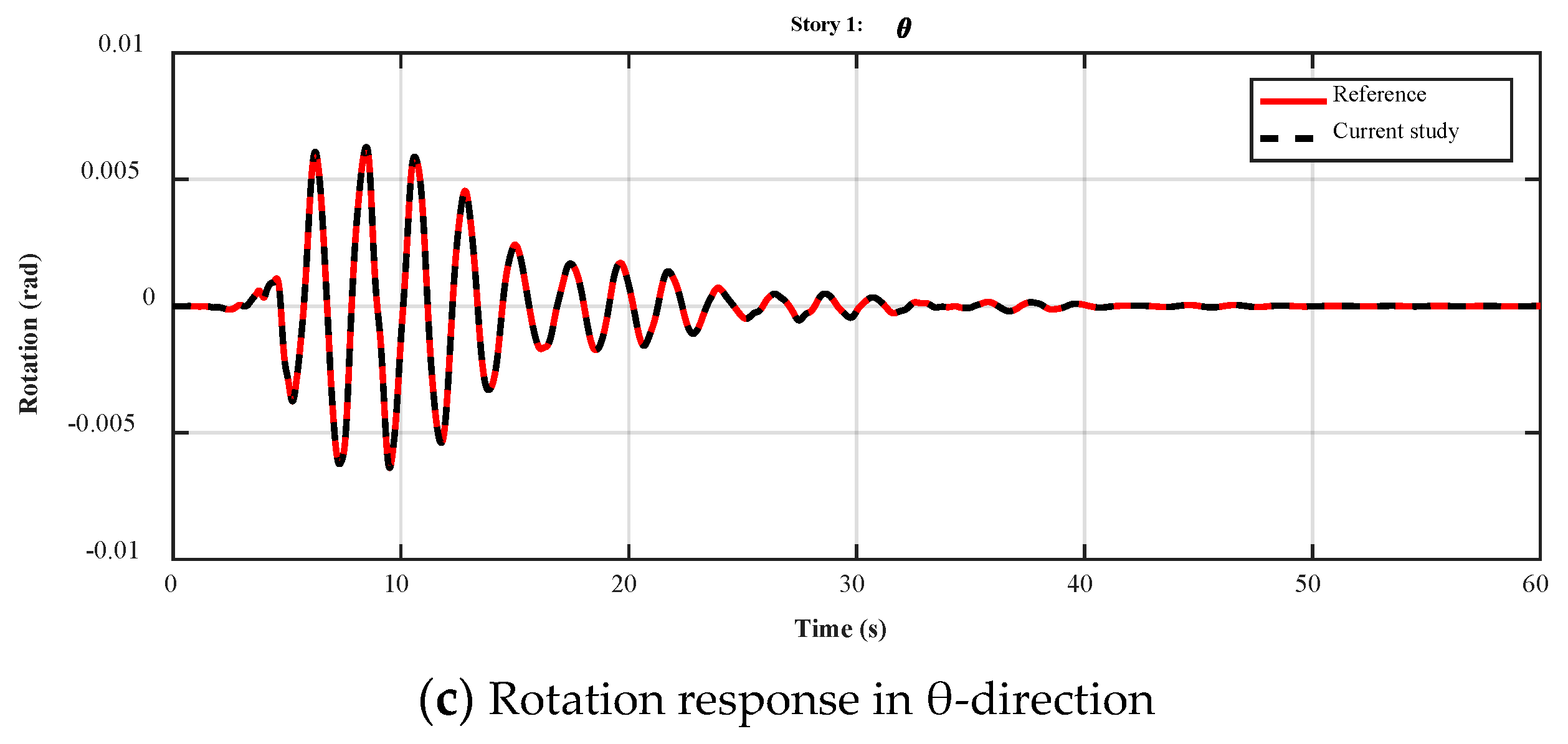
6.3. Calibration of the Numerical Simulation
7. Results and Discussion
7.1. Maximum Responses
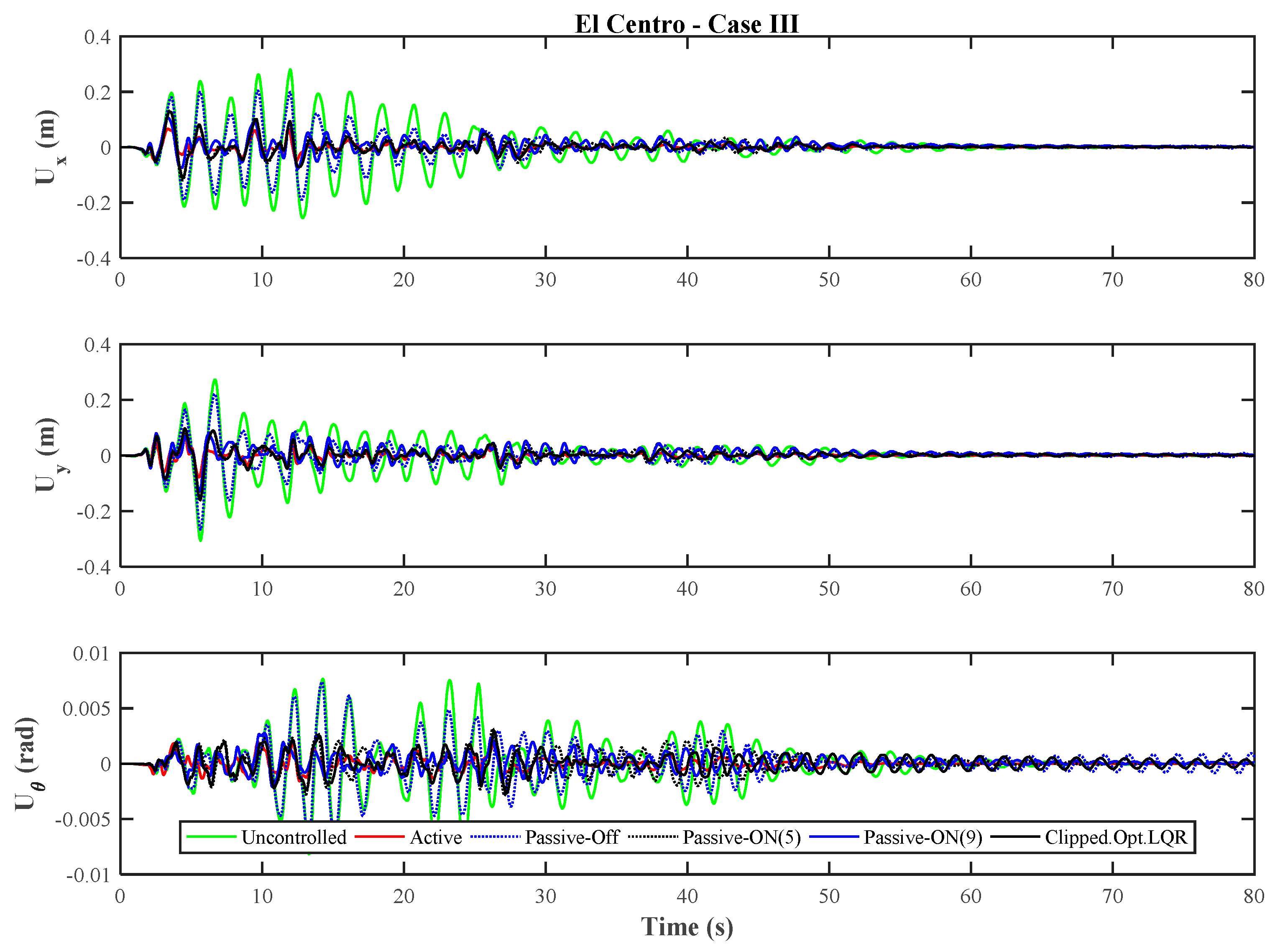
7.2. Time–History Responses
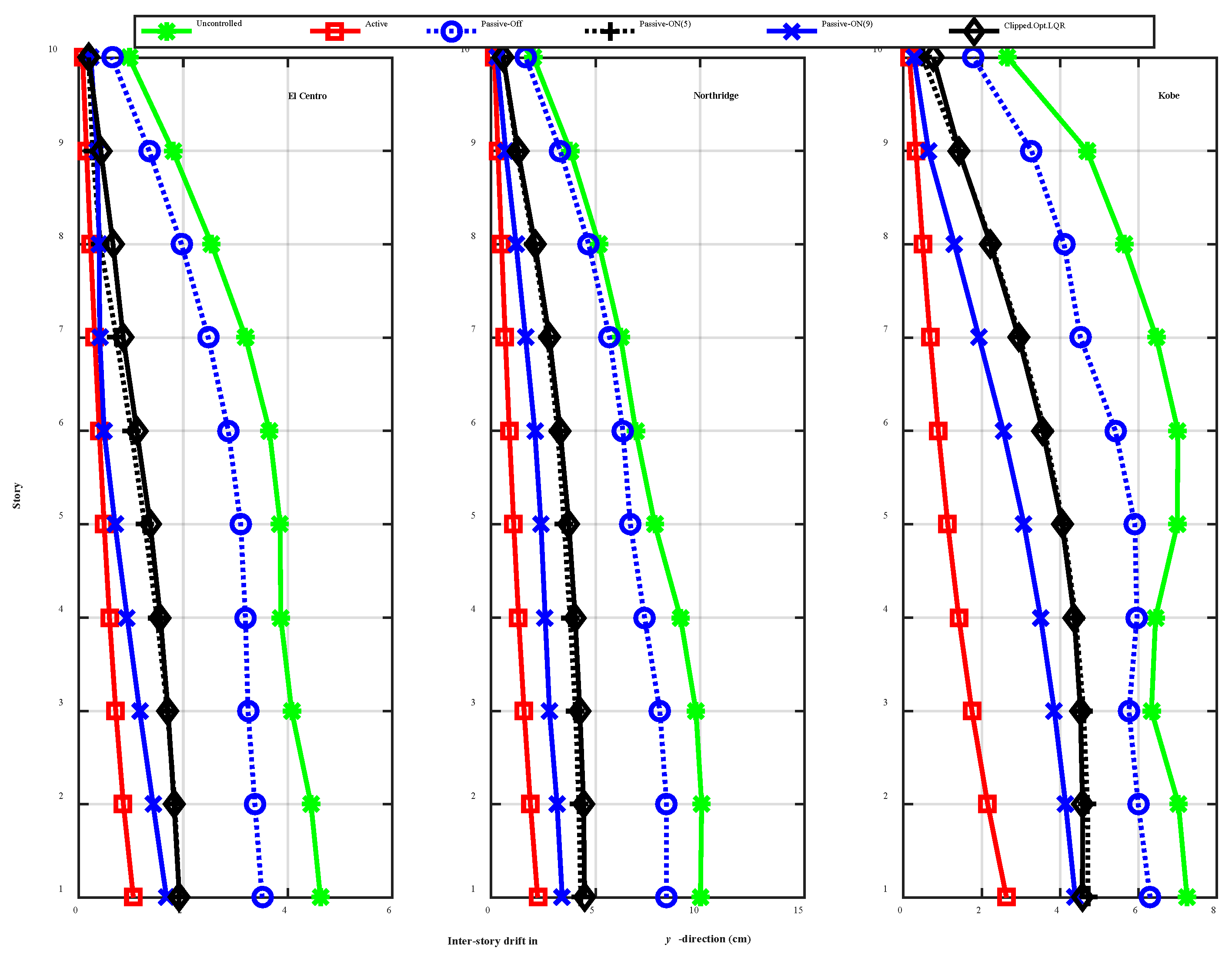
7.3. Maximum Inter-Story Drifts
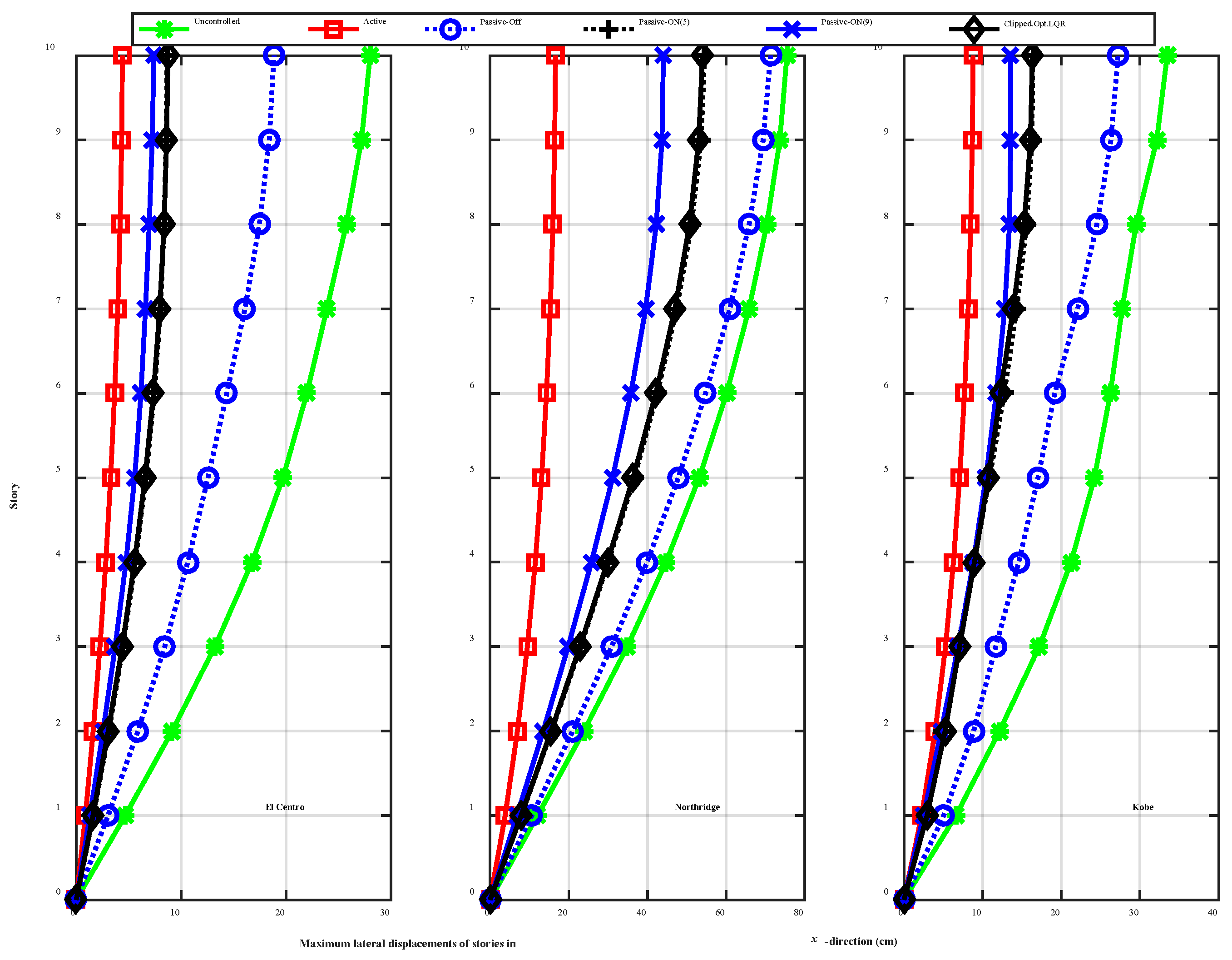
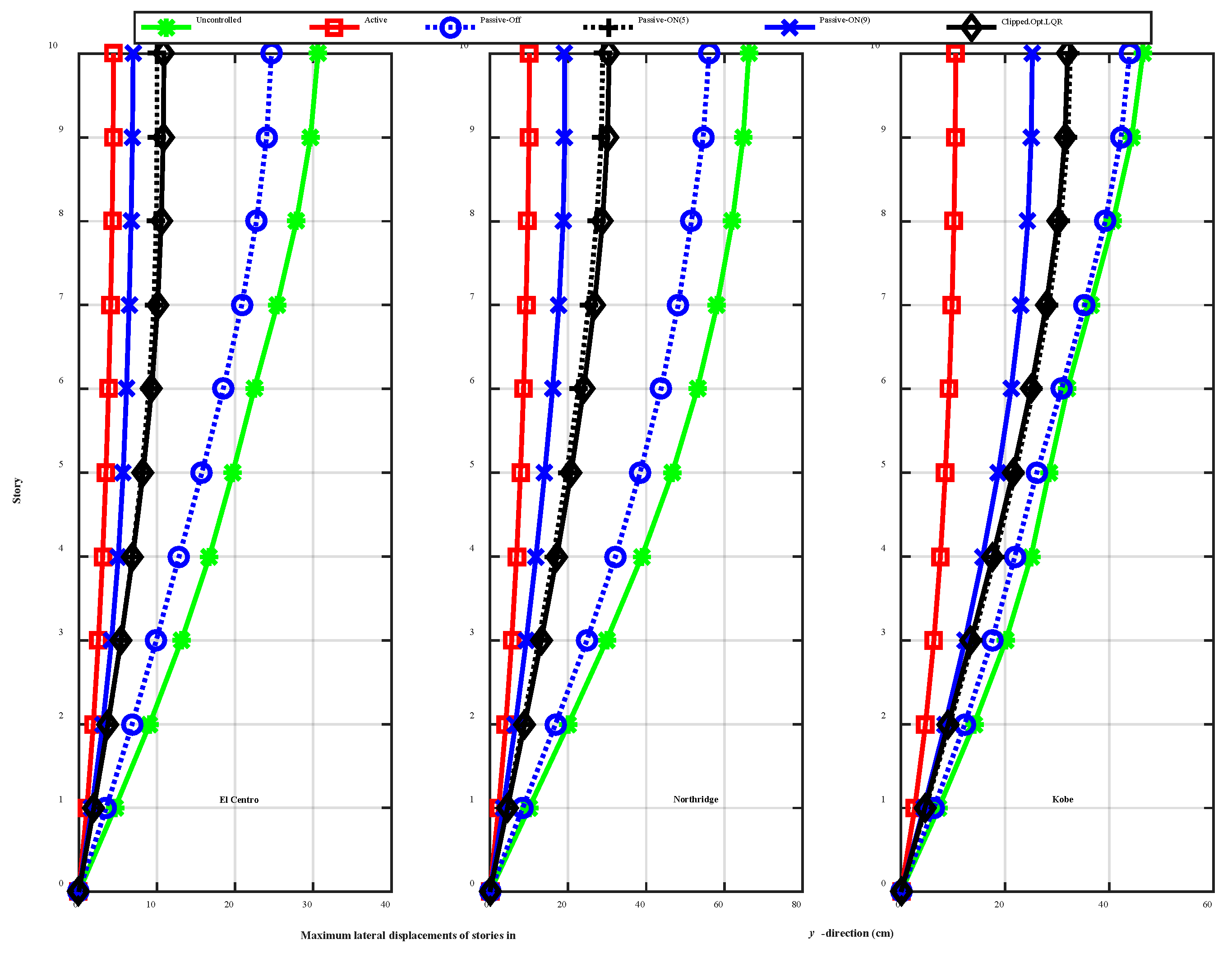
7.4. Maximum Lateral Displacements
8. Summary and Conclusions
Author Contributions
Conflicts of Interest
References
- Mosleh, A.; Rodrigues, H.; Varum, H.; Costa, A.; Arêde, A. Seismic behavior of RC building structures designed according to current codes. Structures 2016, 7, 1–13. [Google Scholar] [CrossRef]
- Mosleh, A.; Varum, H.; Jara, J.; Razzaghi, M.S. Development of fragility curves for RC bridges subjected to reverse and strike-slip seismic sources. Earthq. Struct. 2016, 11, 517–538. [Google Scholar] [CrossRef]
- Rashidi, M.; Takhtfiroozeh, H. Determination of Bond Capacity in Reinforced Concrete Beam and Its Influence on the Flexural Strength. Mech. Mater. Sci. Eng. 2016, 6. [Google Scholar] [CrossRef]
- Rashidi, M.; Heidari, M.; Azizyan, G. Numerical Analysis and Monitoring of an Embankment Dam During Construction and First Impounding (Case Study: Siah Sang Dam). Sci. Iran. J. 2017, in press. [Google Scholar]
- Amiri, G.G.; Azimi, M.; Darvishan, E. Retrofitting I-beam to double-I built-up column connections using through plates and T-stiffeners. Sci. Iran. Trans. A Civ. Eng. 2013, 20, 1695–1707. [Google Scholar]
- Gerist, S.; Maheri, M.R. Multi-stage approach for structural damage detection problem using basis pursuit and particle swarm optimization. J. Sound Vib. 2016, 384, 210–226. [Google Scholar] [CrossRef]
- Kaveh, A.; Bakhshpoori, T.; Ashoory, M. An Efficient Optimization Procedure Based on Cuckoo Search Algorithm for Practical Design of Steel Structures. IUST 2012, 2, 1–14. [Google Scholar]
- Kaveh, A.; Dadras, A. A guided tabu search for profile optimization of finite element models. Int. J. Optim. Civ. Eng. 2017, 7, 527–537. [Google Scholar]
- Kaveh, A.; Dadras, A. Structural damage identification using an enhanced thermal exchange optimization algorithm. Eng. Optim. 2017, 1–22. [Google Scholar] [CrossRef]
- Lin, J.L.; Tsai, K.C. Seismic analysis of two-way asymmetric building systems under bi-directional seismic ground motions. Earthq. Eng. Struct. Dyn. 2008, 37, 305–328. [Google Scholar] [CrossRef]
- Zhang, J.; Zeng, K.; Jiang, J. An optimal design of bi-directional TMD for three dimensional structure. In Computational Structural Engineering; Springer: Berlin, Germany, 2009; pp. 935–941. [Google Scholar]
- Kan, C.L.; Chopra, A.K. Elastic earthquake analysis of a class of torsionally coupled buildings. J. Struct. Div. 1977, 103, 821–838. [Google Scholar]
- Yanik, A.; Aldemir, U.; Bakioglu, M. A new active control performance index for vibration control of three-dimensional structures. Eng. Struct. 2014, 62, 53–64. [Google Scholar] [CrossRef]
- Nigdeli, S.M.; Boduroğlu, M.H. Active Tendon Control of Torsionally Irregular Structures under Near-Fault Ground Motion Excitation. Comput. Aided Civ. Infrastruct. Eng. 2013, 28, 718–736. [Google Scholar] [CrossRef]
- Cruz, E.F.; Cominetti, S. Three-Dimensional Buildings Subjected to Bi-Directional Earthquakes. Validity of Analysis Considering Uni-Directional Earthquakes. In Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 30 January–4 February 2000. [Google Scholar]
- Heo, J.S.; Lee, S.K.; Park, E.; Lee, S.H.; Min, K.W.; Kim, H.; Jo, J.; Cho, B.H. Performance test of a tuned liquid mass damper for reducing bidirectional responses of building structures. Struct. Des. Tall Spec. Build. 2009, 18, 789–805. [Google Scholar] [CrossRef]
- Tso, W.; Zhu, T. Design of torsionally unbalanced structural systems based on code provisions I: Ductility demand. Earthq. Eng. Struct. Dyn. 1992, 21, 609–627. [Google Scholar] [CrossRef]
- Zhu, T.; Tso, W. Design of torsionally unbalanced structural systems based on code provisions II: Strength distribution. Earthq. Eng. Struct. Dyn. 1992, 21, 629–644. [Google Scholar] [CrossRef]
- Correnza, J.; Hutchinson, G.; Chandler, A. Effect of transverse load-resisting elements on inelastic earthquake response of eccentric-plan buildings. Earthq. Eng. Struct. Dyn. 1994, 23, 75–89. [Google Scholar] [CrossRef]
- Mahtabi, M.; Shamsaei, N.; Mitchell, M. Fatigue of Nitinol: The state-of-the-art and ongoing challenges. J. Mech. Behav. Biomed. Mater. 2015, 50, 228–254. [Google Scholar] [CrossRef] [PubMed]
- Mahtabi, M.; Shamsaei, N. Multiaxial fatigue modeling for Nitinol shape memory alloys under in-phase loading. J. Mech. Behav. Biomed. Mater. 2016, 55, 236–249. [Google Scholar] [CrossRef] [PubMed]
- Mahtabi, M.J.; Shamsaei, N. A modified energy-based approach for fatigue life prediction of superelastic NiTi in presence of tensile mean strain and stress. Int. J. Mech. Sci. 2016, 117, 321–333. [Google Scholar] [CrossRef]
- Joghataie, A.; Dizaji, M.S.; Dizaji, F.S. Neural Network Software For Dam-Reservoir Foundation Interaction. In Proceedings of the International Conference on Mechanical, Automotive and Materials Engineering, Dubai, United Arab Emirates, 7–8 January 2012. [Google Scholar]
- Farrokh, M.; Dizaji, M.S.; Joghataie, A. Modeling hysteretic deteriorating behavior using generalized Prandtl neural network. J. Eng. Mech. 2015, 141, 04015024. [Google Scholar] [CrossRef]
- Dizaji, M.S.; Alipour, M.; Harris, D.K. Leveraging Vision for Structural Identification: A Digital Image Correlation Based Approach. In International Digital Imaging Correlation Society, Conference Proceedings of the Society for Experimental Mechanics Series; Philadelphia, PA, USA, 8–11 November 2016; Springer International Publishing: Basel, Switzerland, 2017. [Google Scholar]
- Farrokh, M.; Dizaji, M.S. Adaptive simulation of hysteresis using neuro-Madelung model. J. Intell. Mater. Syst. Struct. 2016, 27, 1713–1724. [Google Scholar] [CrossRef]
- Joghataie, A.; Dizaji, M.S. Neuroplasticity in dynamic neural networks comprised of neurons attached to adaptive base plate. Neural Netw. 2016, 75, 77–83. [Google Scholar] [CrossRef] [PubMed]
- Shook, D.A.; Roschke, P.N.; Ozbulut, O.E. Superelastic semi-active damping of a base-isolated structure. Struct. Control Health Monit. 2008, 15, 746–768. [Google Scholar] [CrossRef]
- Ozbulut, O.; Daghash, S.; Sherif, M. Shape Memory Alloy Cables for Structural Applications. J. Mater. Civ. Eng. 2015, 28, 04015176. [Google Scholar] [CrossRef]
- Spencer, B., Jr.; Nagarajaiah, S. State of the art of structural control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Soong, T.; Spencer, B. Supplemental energy dissipation: State-of-the-art and state-of-the-practice. Eng. Struct. 2002, 24, 243–259. [Google Scholar] [CrossRef]
- Angeles, J.M.; Alvarez-Icaza, L. 3D identification of buildings seismically excited. IFAC Proc. Vol. 2005, 38, 327–332. [Google Scholar] [CrossRef]
- Gattulli, V.; Lepidi, M.; Potenza, F. Seismic protection of frame structures via semi-active control: Modeling and implementation issues. Earthq. Eng. Eng. Vib. 2009, 8, 627–645. [Google Scholar] [CrossRef]
- Lin, J.L.; Tsai, K.C.; Yu, Y.J. Bi-directional coupled tuned mass dampers for the seismic response control of two-way asymmetric-plan buildings. Earthq. Eng. Struct. Dyn. 2011, 40, 675–690. [Google Scholar] [CrossRef]
- Zhao, B.; Gao, H. Torsional vibration control of high-rise building with large local space by using tuned mass damper. Adv. Mater. Res. 2012, 446–449, 3066–3071. [Google Scholar] [CrossRef]
- Farghaly, A.A.; Ahmed, M.S. Optimum design of TMD system for tall buildings. ISRN Civ. Eng. 2012, 2012. [Google Scholar] [CrossRef]
- Amini, F.; Hazaveh, N.K.; Rad, A.A. Wavelet PSO-Based LQR Algorithm for Optimal Structural Control Using Active Tuned Mass Dampers. Comput. Aided Civ. Infrastruct. Eng. 2013, 28, 542–557. [Google Scholar] [CrossRef]
- Basu, B.; Nagarajaiah, S. A wavelet-based time-varying adaptive LQR algorithm for structural control. Eng. Struct. 2008, 30, 2470–2477. [Google Scholar] [CrossRef]
- Lu, L.-Y.; Chu, S.-Y.; Yeh, S.-W.; Peng, C.-H. Modeling and experimental verification of a variable-stiffness isolation system using a leverage mechanism. J. Vib. Control 2011, 17, 1869–1885. [Google Scholar] [CrossRef]
- Uz, M.E.; Hadi, M.N.S. Optimal design of semi active control for adjacent buildings connected by MR damper based on integrated fuzzy logic and multi-objective genetic algorithm. Eng. Struct. 2014, 69, 135–148. [Google Scholar] [CrossRef]
- Abdeddaim, M.; Ounis, A.; Djedoui, N.; Shrimali, M.K. Reduction of Pounding Between Buildings Using Fuzzy Controller. Asian J. Civ. Eng. 2016, 7, 985–1005. [Google Scholar]
- Abdeddaim, M.; Ounis, A.; Djedoui, N.; Shrimali, M.K. Pounding hazard mitigation between adjacent planar buildings using coupling strategy. J. Civ. Struct. Health Monit. 2016, 6, 603–617. [Google Scholar] [CrossRef]
- Guclu, R. Sliding mode and PID control of a structural system against earthquake. Math. Comput. Model. 2006, 44, 210–217. [Google Scholar] [CrossRef]
- Li, Z.; Wang, S. Robust optimal H∞ control for irregular buildings with AMD via LMI approach. Nonlinear Anal. Model. Control 2014, 19, 256–271. [Google Scholar]
- Yoshida, O.; Dyke, S.J.; Giacosa, L.M.; Truman, K.Z. Experimental verification of torsional response control of asymmetric buildings using MR dampers. Earthq. Eng. Struct. Dyn. 2003, 32, 2085–2105. [Google Scholar] [CrossRef]
- Kim, H.; Adeli, H. Hybrid control of irregular steel highrise building structures under seismic excitations. Int. J. Numer. Methods Eng. 2005, 63, 1757–1774. [Google Scholar] [CrossRef]
- Chandiramani, N.K.; Motra, G.B. Lateral-torsional response control of MR damper connected buildings. In Proceedings of the ASME 2013 International Mechanical Engineering Congress and Exposition, San Diego, CA, USA, 15–21 November 2013. [Google Scholar]
- Hong-nan, L.; Lin-sheng, H. Optimal design of liquid dampers for torsionally coupled vibration of structures. In Proceedings of the Fifth World Congress on Intelligent Control and Automation, Hangzhou, China, 15–19 June 2004; pp. 4534–4538. [Google Scholar]
- Cheng, F.Y.; Jiang, H.; Lou, K. Smart Structures: Innovative Systems for Seismic Response Control; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Azimi, M.; Rasoulnia, A.; Lin, Z.; Pan, H. Improved semi-active control algorithm for hydraulic damper-based braced buildings. Struct. Control Health Monit. 2016. [Google Scholar] [CrossRef]
- Spencer, B., Jr.; Dyke, S.; Sain, M.; Carlson, J. Phenomenological model for magnetorheological dampers. J. Eng. Mech. 1997, 123, 230–238. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering; Prentice Hall: Englewood Cliffs, NJ, USA, 2012. [Google Scholar]
- Bouc, R. Forced vibrations of mechanical systems with hysteresis. In Proceedings of the 4th Conference on Non-Linear Oscillation, Prague, Czechoslovakia, 5–9 September 1967. [Google Scholar]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. Phenomenological model of a magnetorheological damper. J. Eng. Mech. ASCE 1997, 123, 230–238. [Google Scholar]
- Zapateiro, M.; Karimi, H.R.; Luo, N.; Phillips, B.M.; Spencer, B.F. Semiactive Backstepping Control for Vibration Reduction in a Structure with Magnetorheological Damper Subject to Seismic Motions. J. Intell. Mater. Syst. Struct. 2009, 20, 2037–2053. [Google Scholar] [CrossRef]
- Karamodin, A.; Kazemi, H. Semi-active control of structures using neuro-predictive algorithm for MR dampers. Struct. Control Health Monit. 2010, 17, 237–253. [Google Scholar] [CrossRef]
- Kurata, N. Actual seismic response control building with semi-active damper system. In Proceedings of the Structures 2001: A Structural Engineering Odyssey, Washington, DC, USA, 21–23 May 2001; pp. 1–8. [Google Scholar]
- Kaveh, A.; Bakhshpoori, T.; Azimi, M. Seismic optimal design of 3D steel frames using cuckoo search algorithm. Struct. Des. Tall Spec. Build. 2015, 24, 210–227. [Google Scholar] [CrossRef]
- Kaveh, A.; Bakhshpoori, T. Optimum design of steel frames using Cuckoo Search algorithm with Lévy flights. Struct. Des. Tall Spec. Build. 2013, 22, 1023–1036. [Google Scholar] [CrossRef]
- Kaveh, A.; Ghafari, M.; Gholipour, Y. Optimal seismic design of 3D steel moment frames: Different ductility types. Struct. Multidiscip. Optim. 2017, 1–16. [Google Scholar] [CrossRef]
- Nazarimofrad, E.; Zahrai, S.M. Seismic control of irregular multistory buildings using active tendons considering soil–structure interaction effect. Soil Dyn. Earthq. Eng. 2016, 89, 100–115. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| c0a | 50.30 (kN s/m) | αa | 8.70 (kN/m) |
| c0b | 48.70 (kN s/m V) | αb | 6.40 (kN/m V) |
| c1a | 8106.2 (kN s/m) | γ | 496 m−2 |
| c1b | 7807.9 (kN s/m V) | β | 496 m−2 |
| k0 | 0.0054 (kN/m) | A | 810.50 |
| k1 | 0.0087 (kN/m) | n | 2 |
| x0 | 0.18 (m) | η | 190 s−1 |
| Earthquake * | Station & Direction | Magnitude (Mw) | PGA (g) | PGV (cm/s) |
|---|---|---|---|---|
| 1940 El Centro | El Centro Array # 9 270° | 7.2 | 0.21 | 30.2 |
| El Centro Array # 9 180° | 7.2 | 0.28 | 31.0 | |
| 1994 Northridge | Sylmar–Olive View Med FF 360° | 6.7 | 0.84 | 129.6 |
| Sylmar–Olive View Med FF 090° | 6.7 | 0.61 | 77.53 | |
| 1995 Kobe | H1170546.KOB 090° | 7.2 | 0.63 | 76.6 |
| H1170546.KOB 000° | 7.2 | 0.83 | 91.13 |
| Earthquake | Response | Uncontrolled | Active | Passive-off | Passive-on (5 volt) | Passive-on (9 volt) | Clipped-Optimal |
|---|---|---|---|---|---|---|---|
| El Centro | (m) | 0.28 | 0.13 | 0.26 | 0.22 | 0.22 | 0.21 |
| (m) | 0.31 | 0.15 | 0.30 | 0.26 | 0.24 | 0.26 | |
| (rad) | 0.008 | 0.004 | 0.008 | 0.008 | 0.009 | 0.008 | |
| (m/s2) | 5.34 | 4.46 | 5.18 | 4.58 | 4.26 | 4.43 | |
| (m/s2) | 5.11 | 5.14 | 5.06 | 4.73 | 4.54 | 4.69 | |
| Northridge | (m) | 0.75 | 0.47 | 0.74 | 0.72 | 0.70 | 0.72 |
| (m) | 0.66 | 0.30 | 0.64 | 0.57 | 0.53 | 0.57 | |
| (rad) | 0.043 | 0.023 | 0.042 | 0.038 | 0.036 | 0.040 | |
| (m/s2) | 13.40 | 13.38 | 13.15 | 12.31 | 11.86 | 12.19 | |
| (m/s2) | 8.52 | 9.94 | 8.18 | 7.84 | 8.13 | 7.95 | |
| Kobe | (m) | 0.33 | 0.27 | 0.32 | 0.29 | 0.27 | 0.29 |
| (m) | 0.46 | 0.28 | 0.46 | 0.45 | 0.46 | 0.44 | |
| (rad) | 0.008 | 0.010 | 0.008 | 0.008 | 0.008 | 0.008 | |
| (m/s2) | 11.24 | 12.70 | 10.96 | 11.10 | 11.45 | 11.13 | |
| (m/s2) | 13.63 | 13.68 | 13.54 | 13.96 | 14.54 | 13.62 |
| Earthquake | Response | Uncontrolled | Active | Passive-off | Passive-on (5 volt) | Passive-on (9 volt) | Clipped-Optimal |
|---|---|---|---|---|---|---|---|
| El Centro | (m) | 0.28 | 0.11 | 0.24 | 0.17 | 0.16 | 0.17 |
| (m) | 0.31 | 0.12 | 0.29 | 0.23 | 0.19 | 0.23 | |
| (rad) | 0.008 | 0.004 | 0.008 | 0.008 | 0.008 | 0.006 | |
| (m/s2) | 5.34 | 4.06 | 5.03 | 3.84 | 3.34 | 3.83 | |
| (m/s2) | 5.11 | 5.46 | 5.03 | 4.33 | 4.60 | 4.37 | |
| Northridge | (m) | 0.75 | 0.41 | 0.74 | 0.69 | 0.66 | 0.68 |
| (m) | 0.66 | 0.25 | 0.62 | 0.50 | 0.44 | 0.51 | |
| (rad) | 0.043 | 0.022 | 0.041 | 0.034 | 0.030 | 0.036 | |
| (m/s2) | 13.40 | 12.19 | 12.93 | 11.33 | 11.02 | 11.18 | |
| (m/s2) | 8.52 | 7.55 | 8.08 | 7.34 | 7.65 | 7.42 | |
| Kobe | (m) | 0.33 | 0.25 | 0.31 | 0.25 | 0.22 | 0.25 |
| (m) | 0.46 | 0.27 | 0.46 | 0.44 | 0.43 | 0.42 | |
| (rad) | 0.008 | 0.009 | 0.008 | 0.007 | 0.008 | 0.007 | |
| (m/s2) | 11.24 | 12.33 | 10.91 | 10.95 | 11.33 | 11.00 | |
| (m/s2) | 13.63 | 14.58 | 13.56 | 13.37 | 13.53 | 13.37 |
| Earthquake | Response | Uncontrolled | Active | Passive-off | Passive-on (5 volt) | Passive-on (9 volt) | Clipped-Optimal |
|---|---|---|---|---|---|---|---|
| El Centro | (m) | 0.28 | 0.07 | 0.20 | 0.13 | 0.11 | 0.13 |
| (m) | 0.31 | 0.08 | 0.27 | 0.15 | 0.13 | 0.16 | |
| (rad) | 0.008 | 0.002 | 0.007 | 0.003 | 0.003 | 0.003 | |
| (m/s2) | 5.34 | 3.91 | 4.57 | 3.41 | 3.44 | 3.41 | |
| (m/s2) | 5.11 | 4.18 | 4.91 | 4.83 | 5.11 | 4.48 | |
| Northridge | (m) | 0.75 | 0.28 | 0.72 | 0.61 | 0.55 | 0.60 |
| (m) | 0.66 | 0.16 | 0.58 | 0.37 | 0.27 | 0.39 | |
| (rad) | 0.043 | 0.011 | 0.039 | 0.027 | 0.023 | 0.027 | |
| (m/s2) | 13.40 | 12.33 | 12.46 | 9.90 | 10.33 | 9.94 | |
| (m/s2) | 8.52 | 8.78 | 7.40 | 7.38 | 8.23 | 7.23 | |
| Kobe | (m) | 0.33 | 0.19 | 0.30 | 0.22 | 0.21 | 0.22 |
| (m) | 0.46 | 0.21 | 0.45 | 0.39 | 0.36 | 0.38 | |
| (rad) | 0.008 | 0.004 | 0.008 | 0.006 | 0.004 | 0.006 | |
| (m/s2) | 11.24 | 10.66 | 10.95 | 11.01 | 11.32 | 10.72 | |
| (m/s2) | 13.63 | 12.84 | 13.14 | 12.21 | 13.08 | 12.08 |
| Earthquake | Response | Uncontrolled | Active | Passive-off | Passive-on (5 volt) | Passive-on (9 volt) | Clipped-Optimal |
|---|---|---|---|---|---|---|---|
| El Centro | (m) | 0.28 | 0.04 | 0.19 | 0.09 | 0.07 | 0.09 |
| (m) | 0.31 | 0.04 | 0.25 | 0.10 | 0.07 | 0.11 | |
| (rad) | 0.008 | 0.001 | 0.007 | 0.002 | 0.001 | 0.002 | |
| (m/s2) | 5.34 | 2.11 | 3.66 | 2.87 | 2.75 | 3.45 | |
| (m/s2) | 5.11 | 3.30 | 4.62 | 3.44 | 3.89 | 3.39 | |
| Northridge | (m) | 0.75 | 0.17 | 0.71 | 0.55 | 0.44 | 0.54 |
| (m) | 0.66 | 0.10 | 0.56 | 0.29 | 0.19 | 0.31 | |
| (rad) | 0.043 | 0.007 | 0.038 | 0.025 | 0.019 | 0.024 | |
| (m/s2) | 13.40 | 7.85 | 11.12 | 9.71 | 10.21 | 9.72 | |
| (m/s2) | 8.52 | 5.21 | 6.79 | 7.44 | 6.58 | 6.94 | |
| Kobe | (m) | 0.33 | 0.09 | 0.27 | 0.16 | 0.14 | 0.16 |
| (m) | 0.46 | 0.11 | 0.44 | 0.33 | 0.25 | 0.32 | |
| (rad) | 0.008 | 0.002 | 0.008 | 0.005 | 0.005 | 0.005 | |
| (m/s2) | 11.24 | 5.51 | 9.97 | 8.38 | 8.18 | 7.74 | |
| (m/s2) | 13.63 | 6.14 | 12.70 | 11.08 | 11.30 | 10.95 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Liu, L.; Rahimi, S. Seismic Vibration Control of 3D Steel Frames with Irregular Plans Using Eccentrically Placed MR Dampers. Sustainability 2017, 9, 1255. https://doi.org/10.3390/su9071255
Hu Y, Liu L, Rahimi S. Seismic Vibration Control of 3D Steel Frames with Irregular Plans Using Eccentrically Placed MR Dampers. Sustainability. 2017; 9(7):1255. https://doi.org/10.3390/su9071255
Chicago/Turabian StyleHu, Yuwen, Lingfei Liu, and Saeed Rahimi. 2017. "Seismic Vibration Control of 3D Steel Frames with Irregular Plans Using Eccentrically Placed MR Dampers" Sustainability 9, no. 7: 1255. https://doi.org/10.3390/su9071255
APA StyleHu, Y., Liu, L., & Rahimi, S. (2017). Seismic Vibration Control of 3D Steel Frames with Irregular Plans Using Eccentrically Placed MR Dampers. Sustainability, 9(7), 1255. https://doi.org/10.3390/su9071255