Adapt or Perish: A Review of Planning Approaches for Adaptation under Deep Uncertainty


__Kwakkel.png)
Abstract
:
1. Introduction
“It is not the strongest of the species that survive, nor the most intelligent, but the ones most responsive to change.”Charles Darwin
- not all uncertainties about the future can be eliminated;
- ignoring uncertainty could mean that we limit our ability to take corrective action in the future and end up in situations that could have been avoided; and
- ignoring uncertainty can result in missed chances and opportunities, and lead to unsustainable plans.
- resistance: plan for the worst possible case or future situation
- resilience: whatever happens in the future, make sure that the system can recover quickly
- static robustness: aim at reducing vulnerability in the largest possible range of conditions
- dynamic robustness (or flexibility): plan to change over time, in case conditions change
- Planned adaptation, which is the result of deliberate decisions, based on an awareness that conditions might change or have changed and that action is required to return to, maintain, or achieve a desired state.
- Autonomous adaptation, which is adaptation that is not a planned external response to a situation, but is an internal system reaction due to changes within the system. (This is sometimes referred to as resilience.)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Adaptation based on: | Type of adaptation | |||
|---|---|---|---|---|
| Intent | Autonomous | Planned | ||
| In relation to climatic stimulus | e.g., unmanaged natural systems | e.g., public agencies | ||
| Timing of actions | Reactive | Concurrent | Anticipatory | |
| From observed modification | During | Prior modification | ||
| Temporal scope | Short term | Long term | ||
| Adjustment, instantaneous, autonomous | Adaptation, cumulative, policy | |||
| Spatial scope | Localized | Widespread | ||
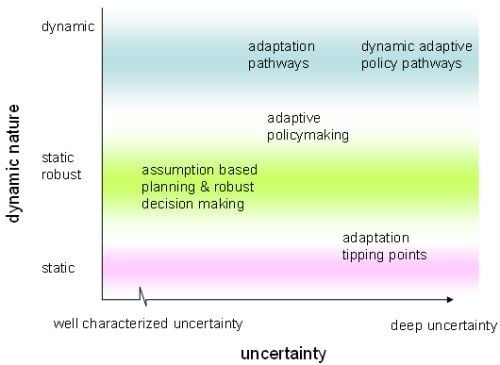
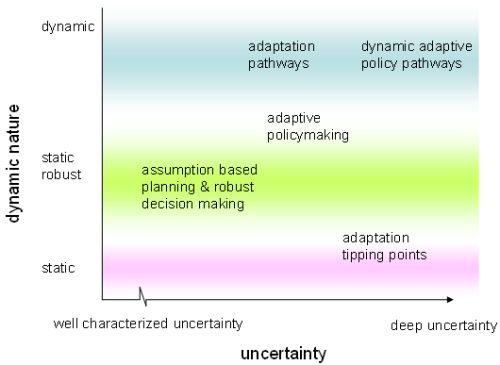
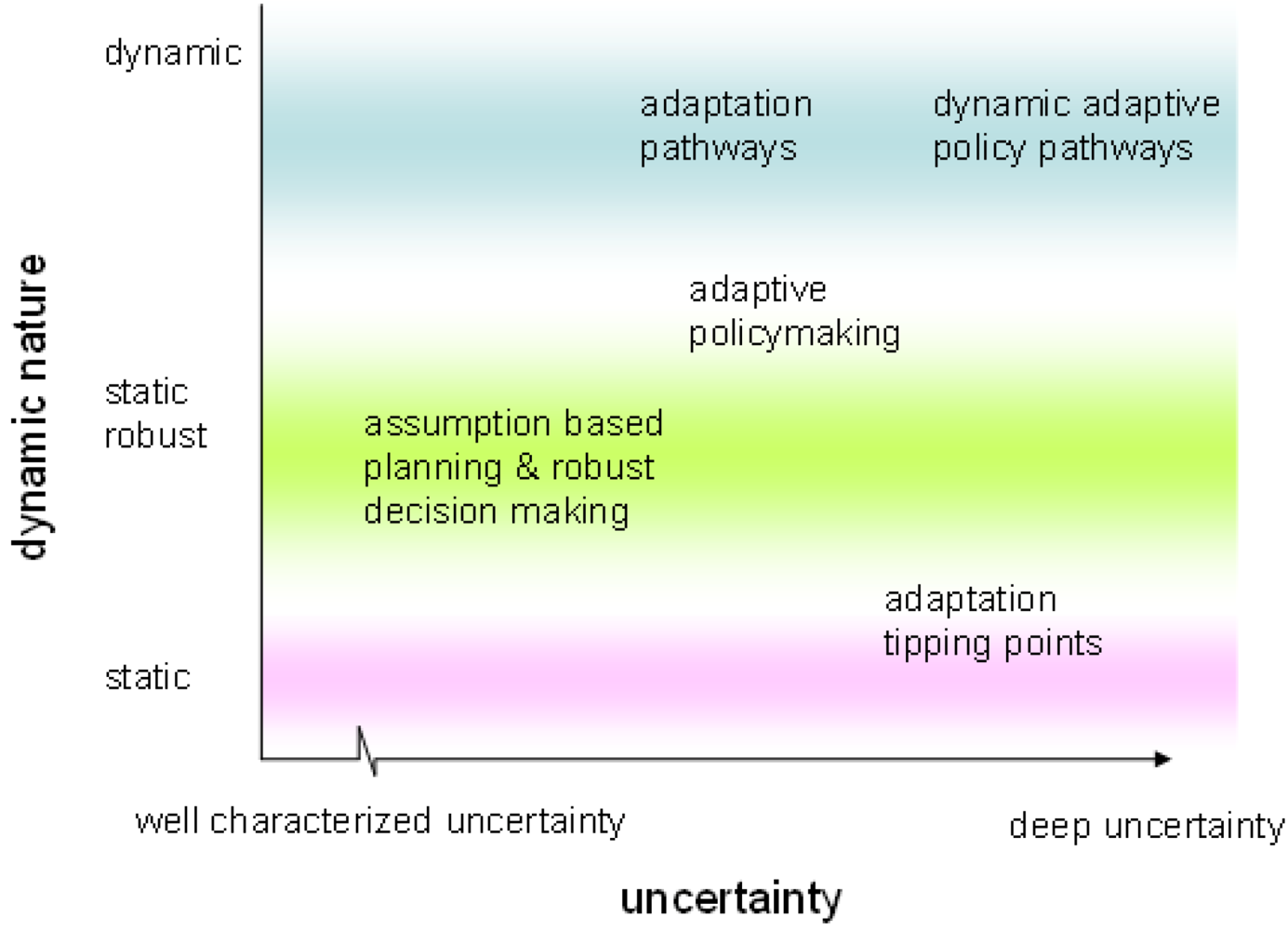
2. Approaches for Designing Sustainable Plans
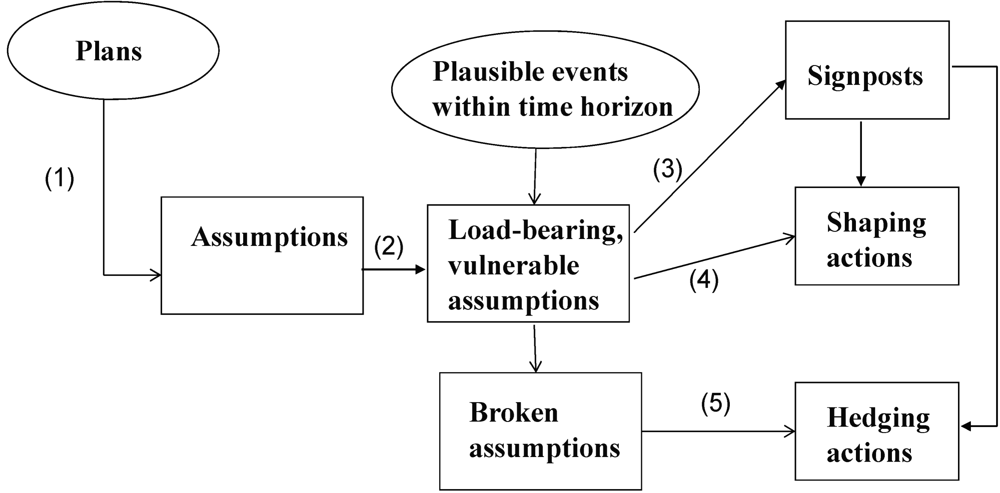
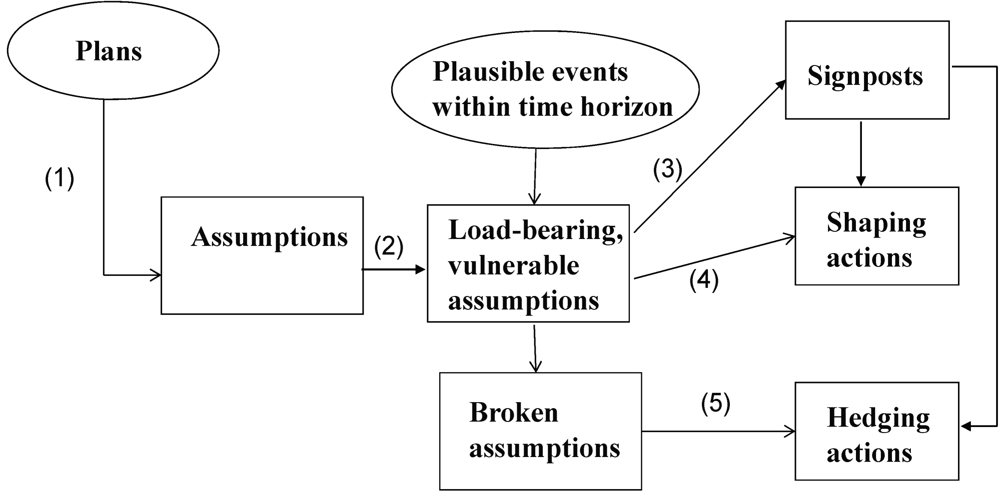
2.1. Assumption-Based Planning
2.2. Robust Decision Making
- (1).
- Scoping—determine the scope of the analysis by identifying exogenous uncertainties, policy options, key relationships, and performance metrics; construct a simulation model that relates actions to consequences.
- (2).
- Simulation—identify a candidate policy to evaluate and run it against an ensemble of scenarios;
- (3).
- Scenario discovery—identify vulnerabilities of the candidate policy (i.e., which combinations of exogenous uncertainties, and in which ranges, cause the policy to fail to meet the goals);
- (4).
- Adaptation—identify hedging actions (modifying existing policies or defining new ones) to address these vulnerabilities. Repeat steps 2 and 3 for additional candidate policies;
- (5).
- Display—Plot expected outcomes of all policies over probabilities of vulnerable scenarios, and choose the most robust plan for implementation.
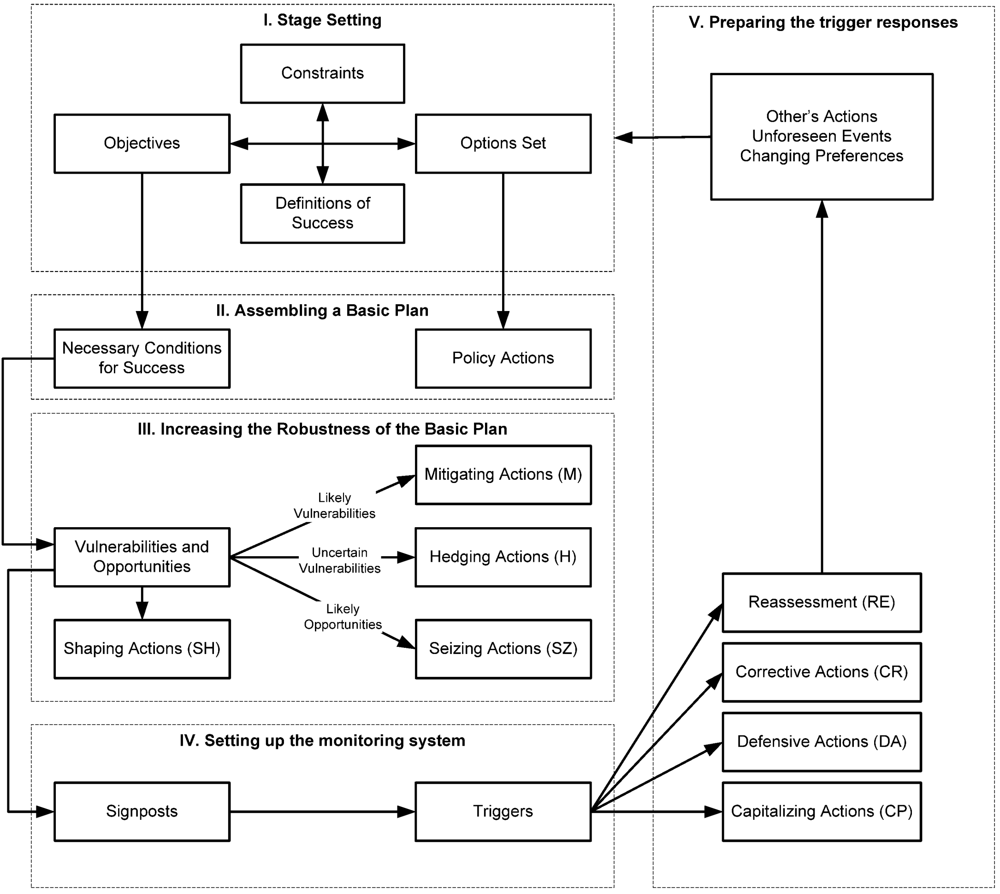
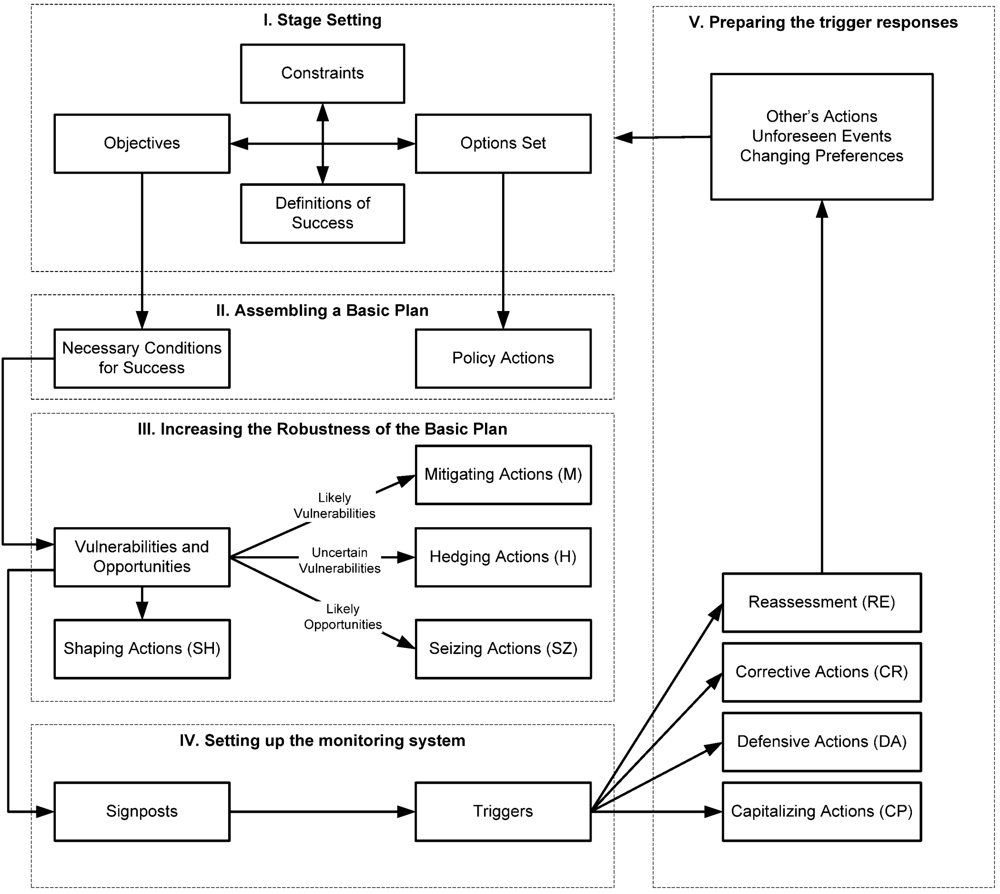
2.3. Adaptive Policymaking
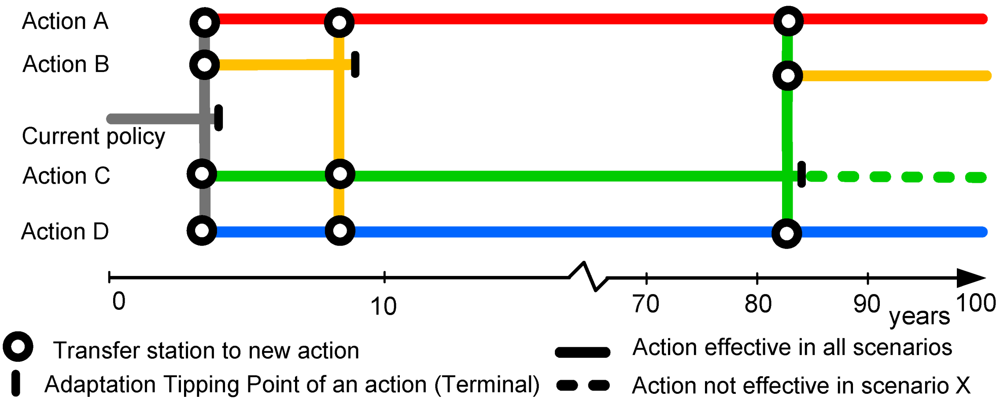
2.4. Adaptation Tipping Points and Adaptation Pathways
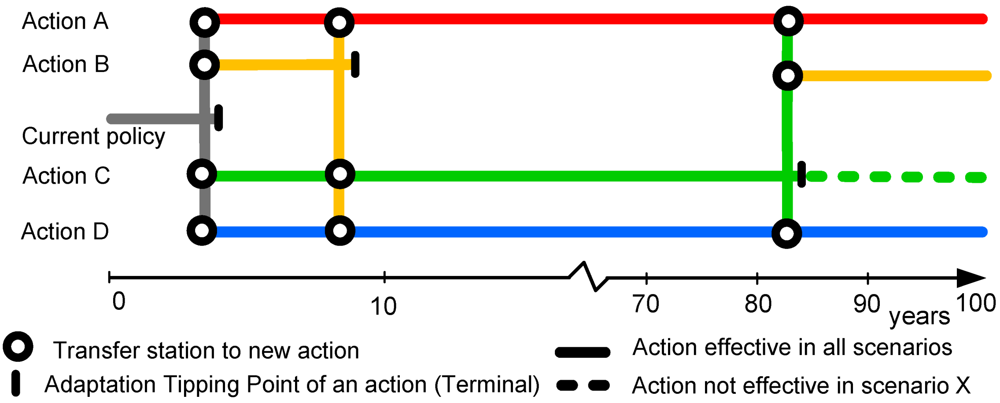
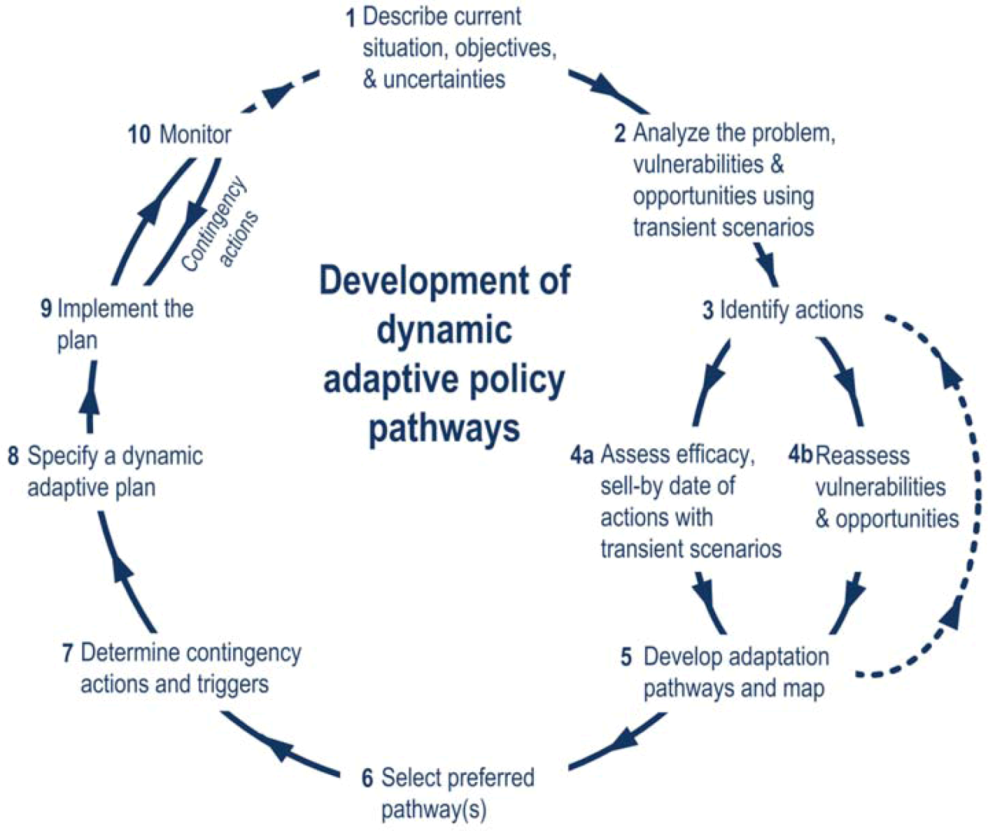
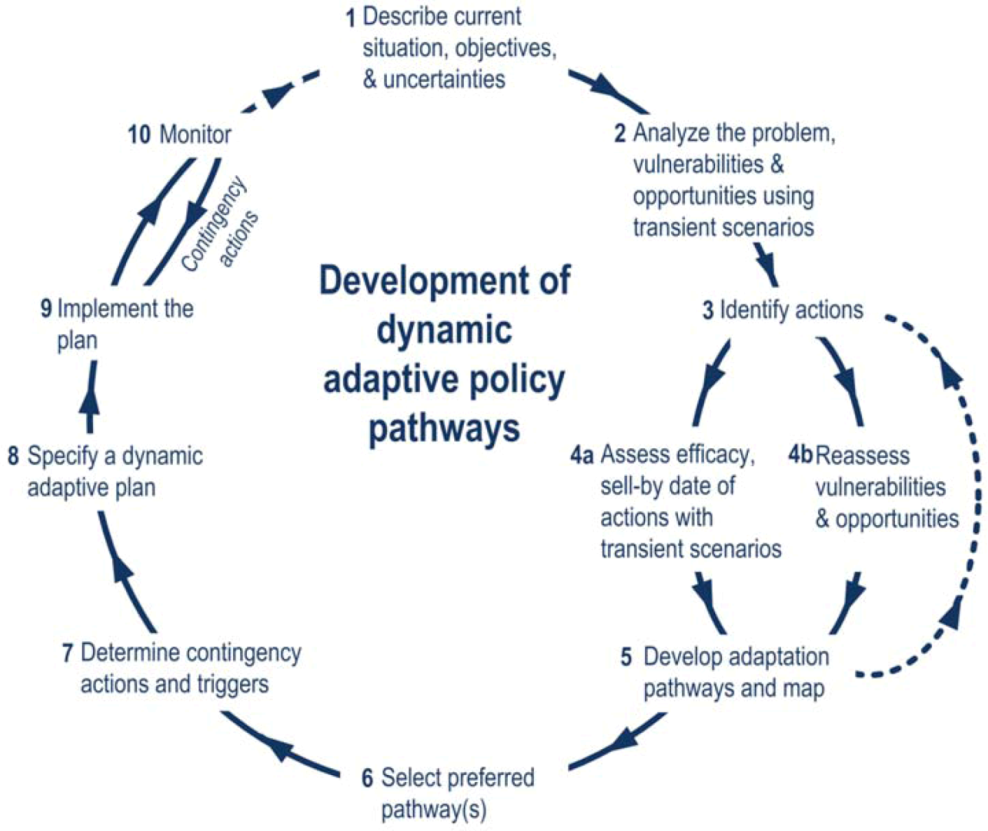
2.5. Dynamic Adaptive Policy Pathways (DAPP)
3. Computational Support Tools for Designing Sustainable Plans
3.1. Fast and Simple Policy Models
3.2. Exploratory Modeling and Analysis (EMA)
3.3. Scenario Discovery
3.4. Robust Optimization
3.5. Info-Gap
4. Discussion
5. Concluding Remarks
- Explore a wide variety of relevant uncertainties in a dynamic way. That is, uncertainties in natural variability, external changes, and policy responses need to be explored over time. For example, climate change may affect precipitation, resulting in floods and droughts, which may initiate a policy response (e.g., dams and dikes) that may affect the water system, initiate urban developments, and influence future policy options.
- Connect short-term targets and long-term goals.
- Commit to short-term actions while keeping options open for the future.
Conflict of Interest
References
- World Commission on Environment and Development, Our Common Future (the Bruntland Report); Oxford University Press: Oxford, UK, 1987.
- Haasnoot, M.; Middelkoop, H.; van Beek, E.; van Deursen, W.P.A. A method to develop sustainable water management strategies for an uncertain future. Sust. Develop. 2011, 19, 369–381. [Google Scholar] [CrossRef]
- McDaniel, R.R.; Driebe, D.J. Uncertainty and Suprise in Complex Systems: Questions on Working the Unexpected; Springer: Berlin, Germany, 2005. [Google Scholar]
- Walker, W.E.; Lempert, R.; Kwakkel, J.H. Deep Uncertainty. In Encyclopedia of Oper. Res. and Management Science, 3rd; Gass, S., Fu, M., Eds.; Springer: Berlin, Germany, 2013. [Google Scholar]
- Lempert, R.J.; Popper, S.; Bankes, S. Shaping the Next One Hundred Years: New Methods for Quantitative, Long Term Policy Analysis; Report MR-1626-RPC; RAND: Santa Monica, CA, USA, 2003. [Google Scholar]
- Kwakkel, J.H.; Walker, W.E.; Marchau, V.A.W.J. Classifying and communicating uncertainties in model-based policy analysis. Int. J. Technol. Policy Manage. 2010, 10, 299–315. [Google Scholar] [CrossRef]
- Dessai, S.; Hulme, M. Assessing the robustness of adaptation decisions to climate change uncertainties: A case study on water resources management in the East of England. Global Environ. Change 2007, 17, 59–72. [Google Scholar]
- McInerney, D.; Lempert, R.; Keller, K. What are robust strategies in the face of uncertain climate threshold responses. Climate Change 2012, 112, 547–568. [Google Scholar] [CrossRef]
- Annema, J.A.; de Jong, M. The History of the Transport Future: Evaluating Dutch Transport Scenarios of the Past. Transport Rev. 2011, 31, 341–356. [Google Scholar] [CrossRef]
- Dessai, S.; Hulme, M. How Do UK Climate Scenarios Compare with Recent Observations? Atmos. Sci. Lett. 2008, 9, 189–195. [Google Scholar] [CrossRef]
- Goodwin, P.; Wright, G. The limits of forecasting methods in anticipating rare events. Techno. Forecasting Soc. Change 2010, 77, 355–368. [Google Scholar] [CrossRef]
- Van Drunen, M.; Leusink, A.; Lasage, R. Towards a Climate-Proof Netherlands. In Water Management in 2020 and Beyond; Biswas, A.K., Tortajada, C., Izquierdo, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Taleb, N.N. The Black Swan; Random House: New York, NY, USA, 2007. [Google Scholar]
- Rosenhead, J.; Mingers, J. Rational Analysis of a Problematic World Revisted: Problem Structuring Methods for Complexity, Uncertainty, and Conflict, 2nd ed; Wiley and Sons: Chichester, UK, 2001. [Google Scholar]
- Lempert, R.J.; Collins, M. Managing the risk of uncertain threshold response: Comparison of robust, optimum, and precautionary approaches. Risk Analysis 2007, 24, 1009–1026. [Google Scholar] [CrossRef]
- Dewey, J. The Public and its Problems; Holt and Company: New York, NY, USA, 1927. [Google Scholar]
- IISD, Designing Policies in a World of Uncertainty, Change and Surprise—Adaptive Policy-Making for Agriculture and Water Resources in the Face of Climate Change—Phase I Research Report; International Institute for Sustainable Development: Winnipeg, Canada, 2006.
- Burton, I. Climate Change and the Adaptation Deficit. In The Earthscan Reader on Adaptation to Climate Change; Schipper, E.L.F., Burton, I., Eds.; Earthscan: London, UK, 2009. [Google Scholar]
- Van der Heijden, K. Scenarios: The Art of Strategic Conversation; John Wiley & Sons: Chichester, England, 1996. [Google Scholar]
- Carter, T.R.; Jones, R.N.; Lu, X.; Bhadwal, S.; Conde, C.; Mearns, L.O.; O’Neill, B.C.; Rounsevell, M.D.A.; Zurek, M.B. New Assessment Methods and the Characterisation of Future Conditions. In Climate Change 2007: Impacts, Adaptation and Vulnerability. Contribution of Working Group II to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Parry, M.L., Canziani, O.F., Palutikof, J.P., van der Linden, P.J., Hanson, C.E., Eds.; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Dewar, J.A.; Builder, C.H.; Hix, W.M.; Levin, M.H. Assumption-Based Planning: A Planning Tool for Very Uncertain Times; Report MR-114-A; RAND: Santa Monica, 1993. [Google Scholar]
- Walker, W.E.; Rahman, S.A.; Cave, J. Adaptive policies, policy analysis, and policymaking. Eur. J. Oper. Res. 2001, 128, 282–289. [Google Scholar] [CrossRef]
- Dewar, J.A. Assumption-Based Planning: A Tool for Reducing Avoidable Surprises; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Dewar, J.A.; Levin, M.H. Assumption-Based Planning for Army 21; R-4172-A; RAND: Santa Monica, CA, USA, 1992. [Google Scholar]
- Groves, D.G.; Lempert, R.J. A new analytic method for finding policy-relevant Scenarios. Global Environ. Change 2007, 17, 73–85. [Google Scholar] [CrossRef]
- Keefe, R. Reconsidering California Transport Policies: Reducing Greenhouse Gas Emissions in an Uncertain Future. Ph.D. dissertation, Pardee RAND Graduate School, 2012. [Google Scholar]
- Hall, J.W.; Lempert, R.J.; Keller, A.; Hackbarth, A.; Mijere, C.; McInerney, D. Robust climate policies under uncertainty: A comparison of robust decision making and info-gap methods. Risk Analysis 2012, 32, 16527–11672. [Google Scholar]
- Seong, S.; Popper, S.; Zheng, K. Strategic Choices in Science and Technology: Korea in the Era of a Rsing China; MG-320-KISTEP; RAND: Santa Monica, CA, 2005. [Google Scholar]
- Lempert, R.J.; Schlesinger, M.E.; Bankes, S.C. When we don’t know the cost or the benefits: Adaptive strategies for abating climate change. Climatic Change 1996, 33, 235–274. [Google Scholar] [CrossRef]
- Fischbach, J.R. Managing New Orleans Flood Risk in an Uncertain Future using Non-Structural Risk Mitigation. Ph.D. dissertation, RAND Graduate School, 2010. [Google Scholar]
- Lempert, R.J.; Sriver, R.L.; Keller, K. Characterizing Uncertain Sea Level Rise Projections to Support Investment Decisions; California Energy Commission: Sacramento, CA, USA, 2012. [Google Scholar]
- Popper, S.; Griffin, J.; Berrebi, C.; Light, T.; Min, E.Y. Natural Gas and Israel’s Energy Future: A Strategic Analysis Under Conditions of Deep Uncertainty; TR-747-YSNFF; RAND: Santa Monica, CA, USA, 2009. [Google Scholar]
- Lempert, R.J.; Groves, D.G. Identifying and evaluating robust adaptive policy responses to climate change for water management agencies in the American west. Technol. Forecast. Soc. 2010, 77, 960–974. [Google Scholar] [CrossRef]
- Groves, D.G. New Methods for Identifying Robust Long-Term Water Resources Management Strategies for California. Ph.D. dissertation, Pardee RAND Graduate School, Santa Monica, CA, USA, 2005. [Google Scholar]
- McCray, L.E.; Oye, K.A.; Petersen, A.C. Planned adaptation in risk regulation: an initial survey of US environmental, health, and safety regulation. Technol. Forecast. Soc. 2010, 77, 951–959. [Google Scholar] [CrossRef]
- Kwakkel, J.H.; Walker, W.E.; Marchau, V.A.W.J. Adaptive airport strategic planning. Eur J. Trans. Infr. Res. 2010, 10, 227–250. [Google Scholar]
- Walker, W.E.; Marchau, V.A.W.J.; Kwakkel, J.H. Uncertainty in the Framework of Policy Analysis. In Public Policy Analysis: New Developments; Thissen, W.A.H., Walker, W.E., Eds.; Springer: Berlin, Germany, 2013. [Google Scholar]
- Taneja, P.; Walker, W.E.; Ligteringen, H.; van Schuylenburg, M.; van der Plas, R. Implications of an uncertain future for port planning. Maritime Policy Manage. 2010, 37, 221–245. [Google Scholar] [CrossRef]
- Rahman, S.A.; Walker, W.E.; Marchau, V. Coping with Uncertainties about Climate Change in Infrastructure Planning—An Adaptive Policymaking Approach; Ecorys: Rotterdam, The Netherlands, 2008. [Google Scholar]
- Marchau, V.A.W.J.; Walker, W.E.; van Duin, R. An adaptive approach to implementing innovative urban transport solutions. Transport Policy 2008, 15, 405–412. [Google Scholar] [CrossRef]
- Marchau, V.A.W.J.; Walker, W.E.; van Wee, G.P. Dynamic adaptive transport policies for handling deep uncertainty. Technol. Forecast. Soc. 2010, 77, 940–950. [Google Scholar] [CrossRef]
- Agusdinata, B.; van Der Pas, J.W.G.M.; Walker, W.E.; Marchau, V.A.W.J. Multi-criteria analysis for evaluating the impacts of intelligent speed adaptation. J. Adv. Transport. 2009, 43, 413–454. [Google Scholar] [CrossRef]
- Hamarat, C.; Kwakkel, J.H.; Pruyt, E. Adaptive robust design under deep uncertainty. Technol. Forecast. Soc. 2012. [Google Scholar] [CrossRef]
- Yohe, G.W. Imbedding Dynamic Responses with Imperfect Information into Static Portraits of the Regional Impact of Climate Change. In Presented at International Workshop on the Natural Resource and Economic Implications of Global Climate Change, Interlaken, Switzerland, 5–9 November 1990.
- Haasnoot, M.; Middelkoop, H.; Offermans, A.; van Beek, E.; van Deursen, W.P.A. Exploring pathways for sustainable water management in river deltas in a changing environment. Climatic Change 2012, 115, 795–819. [Google Scholar] [CrossRef]
- Kwadijk, J.C.J.; Haasnoot, M.; Mulder, J.P.M.; Hoogvliet, M.M.C.; Jeuken, A.B.M.; van der Krogt, R.A.A.; van Oostrom, N.G.C.; Schelfhout, H.A.; van Velzen, E.H.; van Waveren, H.; et al. Using Adaptation Tipping Points to Prepare for Climate Change and Sea Level Rise: A Case Study in the Netherlands. Wiley Interdisciplinary Reviews: Climate Change 2010, 1, 729–740. [Google Scholar]
- Ministerie van Verkeer en Waterstaat Nationaal Bestuursakkord Water. Available online: http://www.ipo.nl/files/8913/5722/8547/nbw.pdf (accessed on 4 February 2013).
- Van den Hurk, B.; Tank, A.K.; Lenderink, G.; van Ulden, A.; van Oldenborgh, G.J.; Katsman, C.; van den Brink, H.; Keller, F.; Bessembinder, J.; Burgers, G.; et al. New climate change scenarios for the Netherlands. Water Sci. Technol. 2007, 56, 27–33. [Google Scholar]
- Katsman, C.; Hazeleger, W.; Drijfhout, S.; van Oldenborgh, G.J.; Burgers, G. Climate scenarios of sea level rise for the northeast atlantic ocean: A study including the effects of ocean dynamics and gravity changes induced by ice melt. Climatic Change 2008, 91, 351–374. [Google Scholar] [CrossRef]
- Jeuken, A.; Reeder, T. Short-term decision making and long-term strategies: How to adapt to uncertain climate change. Water Governance 2011, 1, 29–35. [Google Scholar]
- Washington Metropolitan Area Transit Authority Interactive Map. Available online: http://www.wmata.com/rail/maps/map.cfm (accessed on 4 February 2013).
- Gersonius, B.; Nasruddin, F.; Ashley, R.; Jeuken, A.; Pathirana, A.; Zevenbergen, C. Developing the evidence base for mainstreaming adaptation of stormwater systems to climate change. Water Res. 2012, 6824–6835. [Google Scholar]
- Werners, S.; Swart, R.; van Slobbe, E.; Bölscher, T.; Pfenninger, S.; Trombi, G.; Moriondo, M. Turning Points. In Climate Change Adaptation, The Governance of Adaptation—An International Symposium, Amsterdam, The Netherlands, 22–23 March, 2007; The Governance of Adaptation: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Lawrence, J.; Manning, M. Developing Adaptive Risk Management for Our Changing Climate; A Report of Workshop Outcomes under an Envirolink Grant; The New Zealand Climate Change Research Institute, Victoria University of Wellington: Wellington, New Zealand, 2012. [Google Scholar]
- Schulte-Rentrop, A.; Rudolph, E. A Sensitivity Study of Storm Surges Under the Conditions of Climate Change in the Elbe Estuary. In Climate Change and Disaster Risk Management; Leal Filho, W., Ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Kwakkel, J.H.; Haasnoot, M.; Walker, W.E.; Wijermans, N. Developing Dynamic Adaptive Policy Pathways: A Computer-Assisted Approach to Developing Robust Adaptation Strategies for a Deeply Uncertain World. In Proceedings of Climate Impact Research & Response Coordination for a Larger Europe (CIRCLE 2) Workshop on Uncertainty and Climate Change Adaptation, Lisbon, Portugal, 8–9 November 2012.
- Kwakkel, J.H.; Haasnoot, M. Computer Assisted Dynamic Adaptive Policy Design for Sustainable Water Management in River Deltas in a Changing Environment. In International Congress on Environmental Modelling and Software Managing Resources of a Limited Planet, Sixth Biennial Meeting; Seppelt, R., Voinov, A.A., Lange, S., Bankamp, D., Eds.; Sixth Biennial Meeting: Leipzig, Germany, 2012. [Google Scholar]
- Wijermans, N.; Haasnoot, M.; Offermans, A.; Middelkoop, H. Modelling policy as social uncertainty, integrated modelling and pathway exploration. unpublished work.
- Ministry of Transport. The 2011 Delta Programme: Working on the delta—Investing in a Safe and Attractive Netherlands, Now and in the Future. 2010. Available online: http://www.deltacommissaris.nl/english/Images/Deltaprogramma_ENG1_tcm310-286802.pdf (accessed on 4 February 2013).
- Wilby, R.L.; Keenan, R. Adapting to flood risk under climate change. Prog. Phys. Geog. 2012, 36, 348–378. [Google Scholar] [CrossRef]
- Rosenzweig, C.; Solecki, W.D.; Blake, R.; Bowman, M.; Faris, C.; Gornitz, V.; Horton, R.; Jacob, K.; Le Blanc, A.; Leichenko, R.; et al. Developing coastal adaptation to climate change in the New York city infrastructure-shed: Process, approach, tools, and strategies. Climatic Change 2011, 106, 93–127. [Google Scholar]
- Holling, C.S. Adaptive Environmental Assessment and Management; John Wiley & Sons: New York, New York, USA, 1978. [Google Scholar]
- Lee, K. Compass and Gyroscope: Integrating Science and Politics for the Environment; Island Press: Washington, DC, USA, 1993. [Google Scholar]
- Offermans, A.; Haasnoot, M.; Valkering, P. A method to explore social response for sustainable water management strategies under changing conditions. Sustain. Dev. 2011, 19, 312–324. [Google Scholar] [CrossRef]
- Haasnoot, M.; Kwakkel, J.H.; Walker, W.E.; Ter Maat, J. Dynamic adaptive policy pathways: A new method for crafting robust decisions for a deeply uncertain world. Global. Environ. Change 2003. [Google Scholar] [CrossRef]
- Haasnoot, M.; van Deursen, W.P.A.; Middelkoop, H.; van Beek, E.; Wijermans, N. An Integrated Assessment Metamodel for Developing Adaptation Pathways for the Rhine Delta in the Netherlands. In International Congress on Environmental Modeling and Software: Managing Resources of a Limited Planet; Seppelt, R., Voinov, A., Lange, S., Bankamp, D., Eds.; International Congress on Environmental Modeling and Software: Leipzig, Germany, 2012. [Google Scholar]
- Morgan, M.G.; Dowlatabadi, H. Learning from integrated assessment of climate change. Climatic Change 1996, 34, 337–368. [Google Scholar] [CrossRef]
- Rotmans, J.; De Vries, B.J.M. Perspectives on Global Change: The TARGETS Approach; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Van Asselt, M.B.A. Perspectives on Uncertainty and Risk; Kluwer Academic Publishers: Dordrecht, the Netherlands, 2000. [Google Scholar]
- Middelkoop, H.; van Asselt, M.B.A.; Vanʼt Klooster, S.A.; van Deursen, W.P.A.; Kwadijk, J.C.J.; Buiteveld, H. Perspectives on flood management in the Rhine and Meuse rivers. River Res. Appl. 2004, 20, 327–342. [Google Scholar]
- Van Asselt, M.B.A.; Rotmans, J. Uncertainty in integrated assessment modelling. From positivism to pluralism. Climate Change 2002, 54, 75–105. [Google Scholar] [CrossRef]
- Walker, W.E.; van Daalen, C. System Models for Policy Analysis. In Public Policy Analysis: New Development; Thissen, W.A.H., Walker, W.E., Eds.; Springer: Berlin, Germany, 2013. [Google Scholar]
- Davis, P.K.; Bigelow, J.H. Experiments in Multiresolution Modeling (MRM); RAND: Santa Monica, CA, USA, 1998. [Google Scholar]
- Van Grol, R.; Walker, W.E.; Rahman, S.A.; de Jong, G. Using a Metamodel to Analyze Sustainable Transport Policies for Europe: The SUMMA Project’s Fast Simple Model. In EURO 2006, 21st European Conference on Operational Research; Iceland, 2006. [Google Scholar]
- Welsh, W.D.; Vaze, J.; Dutta, D.; Rassam, D.; Rahman, J.M.; Jolly, I.D.; Wallbrink, P.; Podger, G.M.; Bethune, M.; et al. An integrated modelling framework for regulated river systems. Environ. Modell. Softw. 2012, 39, 81–102. [Google Scholar]
- Bankes, S.C. Exploratory modeling for policy analysis. Oper. Res. 1993, 4, 435–449. [Google Scholar]
- Bankes, S.C.; Walker, W.E.; Kwakkel, J.H. Exploratory Modeling and Analysis. In Encyclopedia of Oper. Res. and Management Science, 3rd; Gass, S., Fu, M.C., Eds.; Springer: Berlin, Germany, 2013. [Google Scholar]
- Agusdinata, D.B. Exploratory Modeling and Analysis: A Promising Method to deal with Deep Uncertainty. Ph.D. thesis, Delft University of Technology, Delft, the Netherlands, 2008. [Google Scholar]
- Kwakkel, J.H.; Pruyt, E. Exploratory modeling and analysis, an approach for model-based foresight under deep uncertainty. Technol. Forecast. Soc. 2012. [Google Scholar] [CrossRef]
- Hodges, J. S. Six (or so) Things you can do with a bad model. Oper. Res. 1991, 39, 355–365. [Google Scholar]
- Hodges, J.S.; Dewar, J.A. Is it You or Your Model Talking? A Framework for Model Validation; R-4114-AF/A/OSD; RAND: Santa Monica, CA, USA, 1992. [Google Scholar]
- Kwakkel, J.H.; Walker, W.E.; Marchau, V.A.W.J. From Predictive Modeling to Exploratory Modeling: How to use Non- Predictive Models for Decisionmaking under Deep Uncertainty. In Proceedings of Uncertainty and Robustness in Planning and Decision Making, Coimbra, Portugal, 15–17 April 2010.
- Bryant, B.P.; Lempert, R.J. Thinking inside the box: A participatory computer-assisted approach to scenario discovery. Technol. Forecast. Soc. 2010, 77, 34–49. [Google Scholar] [CrossRef]
- Kwakkel, J.H.; Auping, W.; Pruyt, E. Dynamic scenario discovery under deep uncertainty: The future of copper. Technol. Forecast. Soc. 2012. [Google Scholar] [CrossRef]
- Lempert, R.J.; Bryant, B.P.; Bankes, S. Comparing Algorithms for Scenario Discovery; WR-557-NSF; RAND: Santa Monica, CA, USA, 2008. [Google Scholar]
- Gerst, M.D.; Wang, P.; Borsuk, M.E. Discovering plausible energy and economic futures under global change using multidimensional scenario discovery. Environ. Model. Softw. 2012. [Google Scholar] [CrossRef]
- Bankes, S.C. The Use of Complexity for Policy Exploration. In The SAGE Handbook of Complexity and Management; Allen, P., Maguire, S., McKelvey, B., Eds.; SAGE Publications Ltd.: London, UK, 2011. [Google Scholar]
- Rosenhead, J.; Elton, M.; Gupta, S.K. Robustness and optimality as criteria for strategic decisions. Oper. Res. Q. 1973, 23, 413–431. [Google Scholar] [CrossRef]
- Kouvalis, P.; Yu, G. Robust Discrete Optimization and its Application; Kluwer Academic Publisher: Dordrecht, The Netherlands, 1997. [Google Scholar]
- Ben-Tal, A.; Nemirovski, A. Robust convex optimization. Mathematics Oper. Res. 1998, 23, 769–805. [Google Scholar]
- Ben-Tal, A.; Nemirovski, A. Robust solutions of linear programming problems contaminated with uncertain data. Math. Program. 2000, 88, 411–424. [Google Scholar] [CrossRef]
- Bertsimas, D.; Sim, M. The price of robustness. Oper. Res. 2004, 52, 35–53. [Google Scholar]
- Wald, A. Statistical decision functions which minimize the maximum risk. Ann. Math. 1945, 46, 265–280. [Google Scholar] [CrossRef]
- Savage, L.T. The theory of statistical decisions. J.A.S.A. 1951, 46, 55–67. [Google Scholar] [CrossRef]
- Simon, H.A. Rational choice and the structure of the environment. Psychol. Rev. 1956, 63, 129–138. [Google Scholar] [CrossRef]
- Kwakkel, J.H.; Walker, W.E.; Marchau, V.A.W.J. Assessing the efficacy of adaptive airport strategic planning: Results from computational experiments. Environ. Plann. B. 2012, 39, 533–550. [Google Scholar] [CrossRef]
- Ben Haim, Y. Information-Gap Decision Theory: Decision Under Severe Uncertainty; Academic Press: London, UK, 2001. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE T. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Ben Haim, Y. Information-Gap Decision Theory: Decision Under Severe Uncertainty, 2nd ed; Academic Press: London, UK, 2006. [Google Scholar]
- Hall, J.W.; Solomatine, D. A framework for uncertainty analysis in food risk management decisions. J.R.B.M. 2008, 6, 85–98. [Google Scholar]
- Hall, J.W.; Harvey, H. Decision Making under Severe Uncertainties for Flood Risk Management: A Case Study of Info-Gap Robustness Analysis. In Proceedings of 8th International Conference on Hydroinformatics 2009, Concepcion, Chili, 12–16 January 2009.
- Levy, J.K.; Hipel, K.W.; Kilgour, M. Using environmental indicators to quantify the robustness of policy alternatives to uncertainty. Ecol. Model. 2000, 130, 79–86. [Google Scholar] [CrossRef]
- Korteling, B.; Dessai, S.; Kapelan, Z. Unsing information-gap decision theory for water resources planning under severe uncertainty. Water Resour. Manag. 2012, 27s, 1149–1172. [Google Scholar]
- Van Asselt, M.B.A.; Rotmans, J. Uncertainties in Perspective. In Perspectives on Global Change: The TARGETS Approach; Rotmans, J., de Vries, B., Eds.; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Hoekstra, A.Y. Perspectives on Water: An Integrated Model-Based Exploration of the Future. Ph.D. thesis, Delft University of Technology, Delft, The Netherlands, 1998. [Google Scholar]
- Van Asselt, M.B.A.; vanʼt Klooster, S.A.; van Notten, P.W.F. Foresight in Action: Developing Policy-Oriented Scenarios; Earthscan: London, UK, 2010. [Google Scholar]
- Offermans, A. Perspectives Method: Towards Socially Robust River Management. University of Maastricht: Maastricht, The Netherlands, 2012. [Google Scholar]
- Walker, W.; Harremoës, P.; Rotmans, J.; Van der Sluijs, J.; van Asselt, M.; Janssen, P.; von Krauss, M. Defining uncertainty: A conceptual basis for uncertainty management in model-based decision support. Integr. Assessment 2003, 4, 5–17. [Google Scholar] [CrossRef]
- Holmbert, J.; Robert, K.H. Backcasting from Non-overlapping Sustainability Principles—a Framework for Strategic Planning. Int. J. Sustain. Dev. World Ecology 2000, 7, 293–308. [Google Scholar]
- Lindstone, H.A.; Turoff, M. The Delphi Method: Techniques and Applications; Addison-Wesley: Boston, MA, USA, 1975. [Google Scholar]
- Yzer, J.R.; Walker, W.E.; Marchau, V.A.W.J.; Kwakkel, J.H. Dynamic adaptive policies: A way to improve the cost-benefit performance of megaprojects? Environ. Plann. B. under review.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Walker, W.E.; Haasnoot, M.; Kwakkel, J.H. Adapt or Perish: A Review of Planning Approaches for Adaptation under Deep Uncertainty. Sustainability 2013, 5, 955-979. https://doi.org/10.3390/su5030955
Walker WE, Haasnoot M, Kwakkel JH. Adapt or Perish: A Review of Planning Approaches for Adaptation under Deep Uncertainty. Sustainability. 2013; 5(3):955-979. https://doi.org/10.3390/su5030955
Chicago/Turabian StyleWalker, Warren E., Marjolijn Haasnoot, and Jan H. Kwakkel. 2013. "Adapt or Perish: A Review of Planning Approaches for Adaptation under Deep Uncertainty" Sustainability 5, no. 3: 955-979. https://doi.org/10.3390/su5030955
APA StyleWalker, W. E., Haasnoot, M., & Kwakkel, J. H. (2013). Adapt or Perish: A Review of Planning Approaches for Adaptation under Deep Uncertainty. Sustainability, 5(3), 955-979. https://doi.org/10.3390/su5030955