
Lane Change Trajectory Planning for Intelligent Electric Vehicles in Dynamic Traffic Environments: Aiming at Optimal Energy Consumption






Abstract
1. Introduction
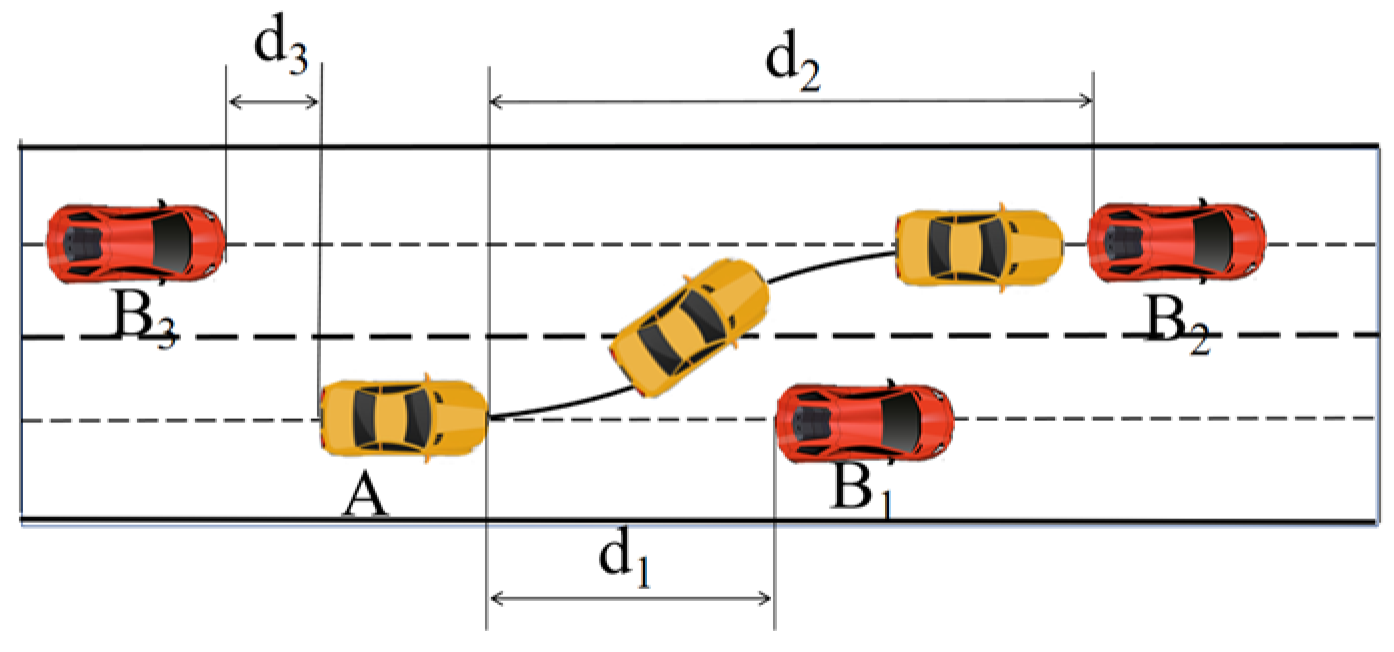
- Considering the dynamic time variation of the surrounding obstacles, a segmented trajectory planning model is developed to dynamically adjust the trajectory of lane changing;
- Considering the braking energy recovery characteristics of electric vehicles, a cost function that simultaneously considers economy, comfort, efficiency, and safety risks is constructed;
- The impact of various lane-changing factors on the energy usage of electric vehicle lane changes is analyzed.
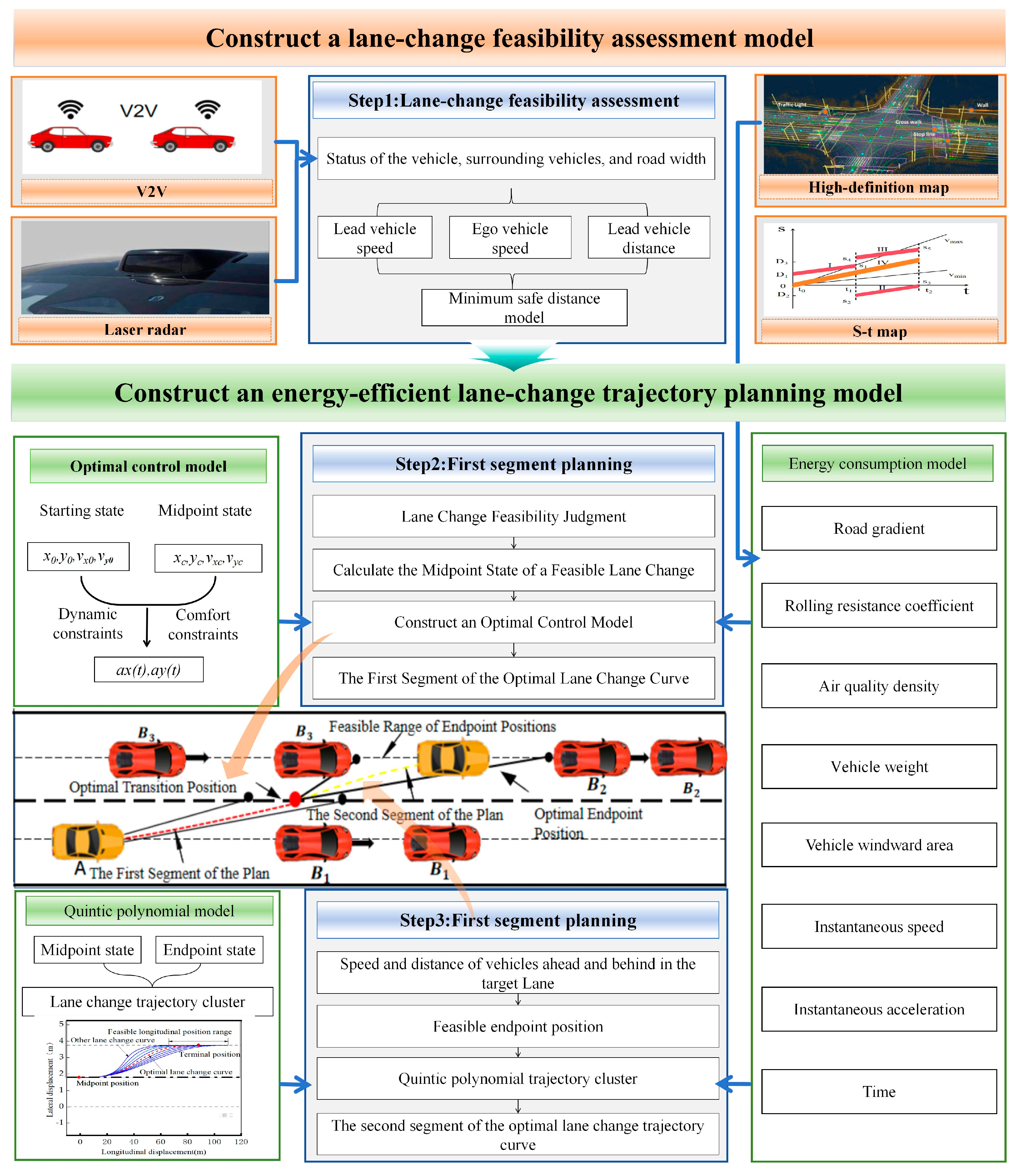
2. System Architecture
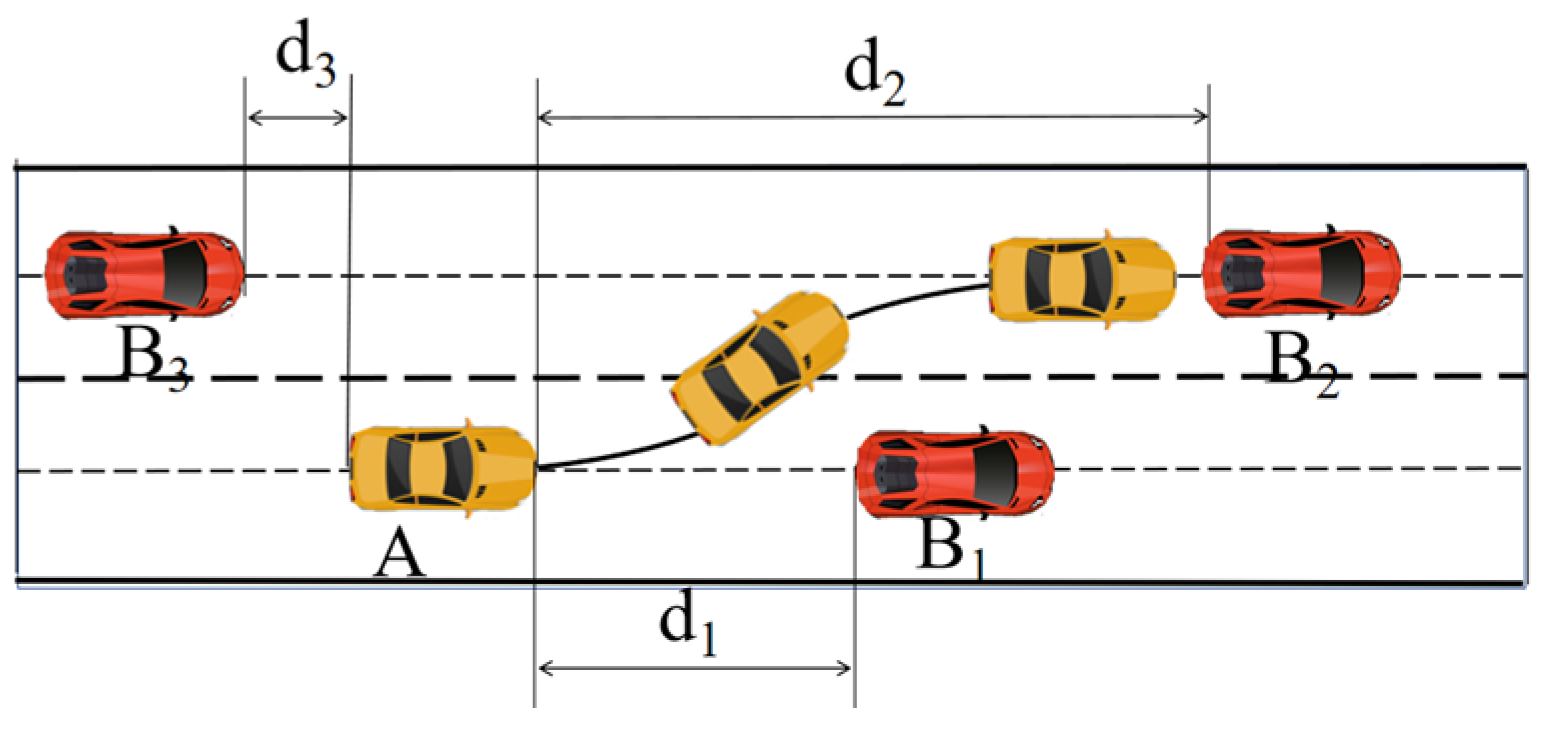
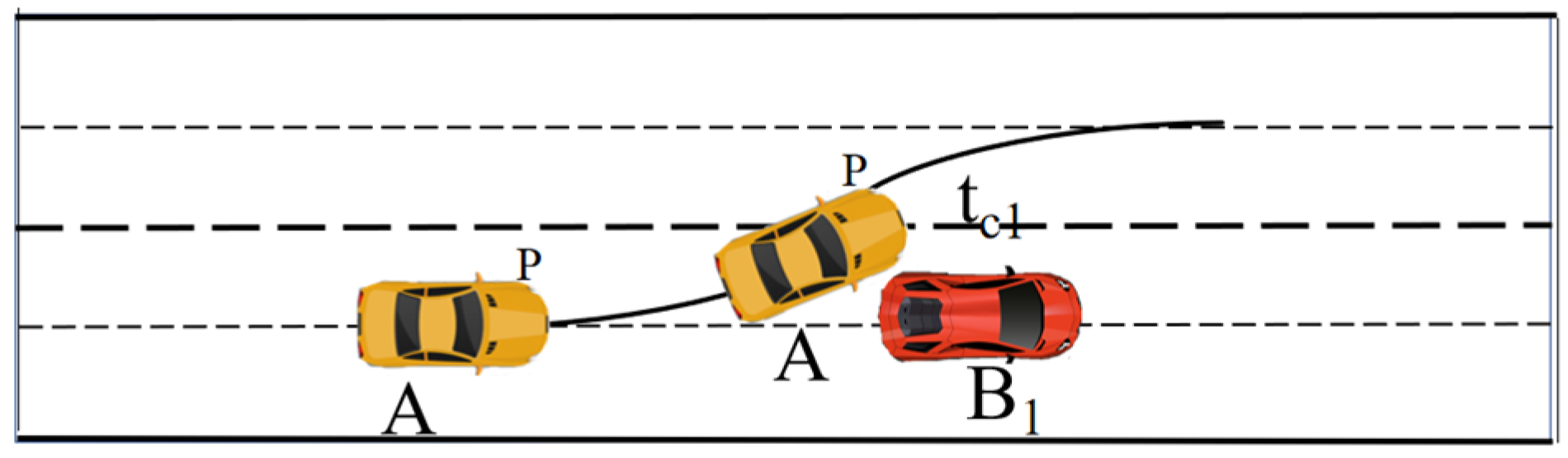
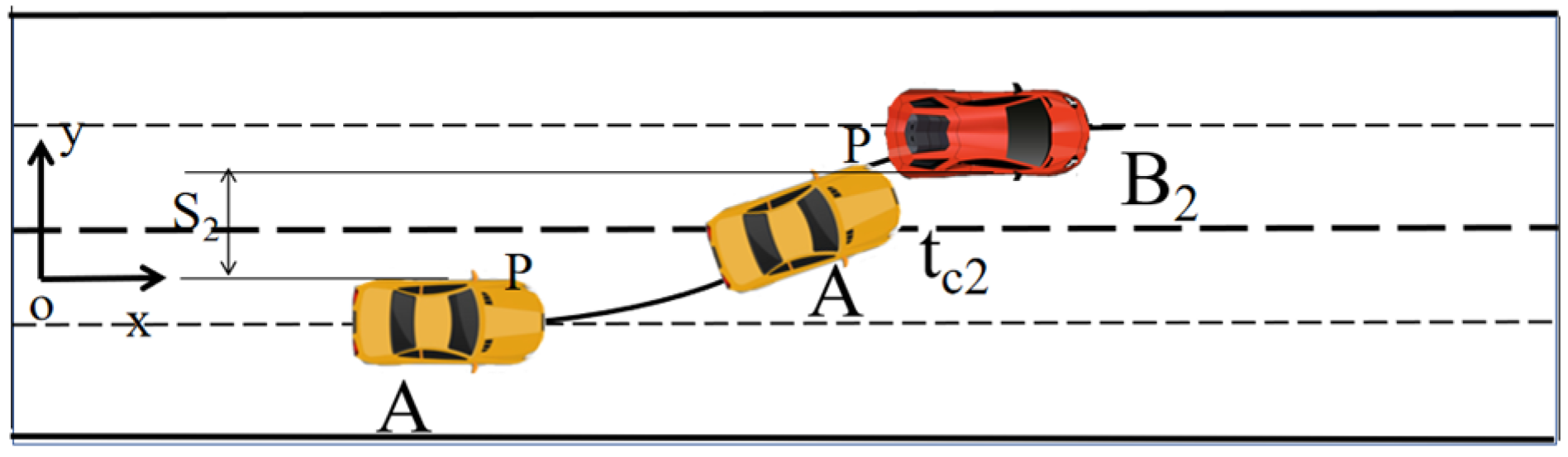
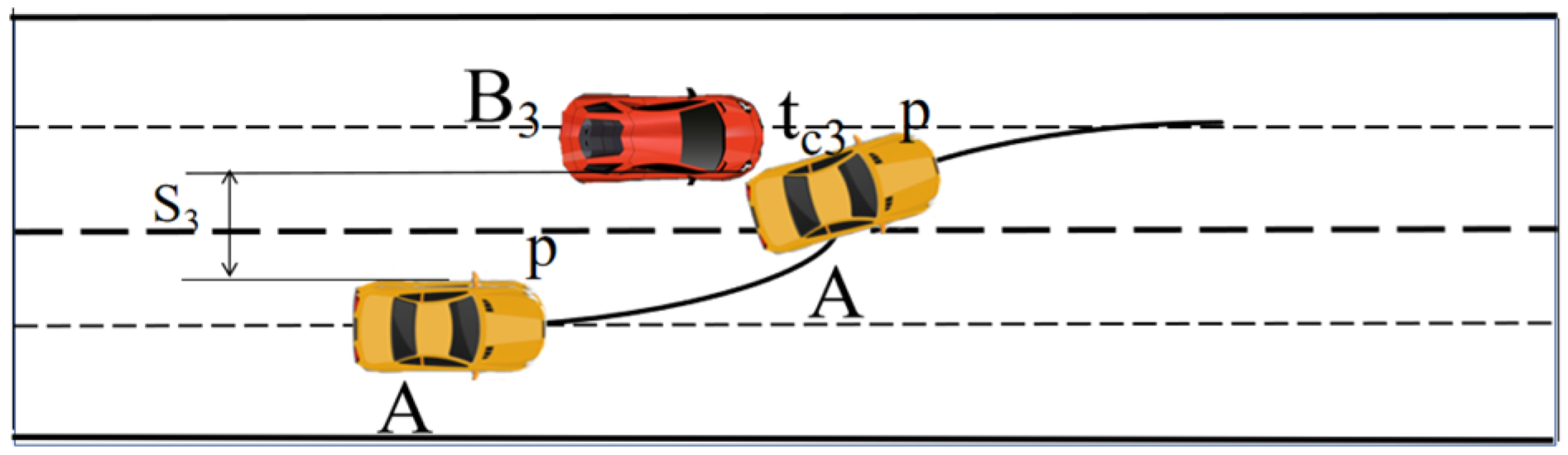
3. Lang-Changing Feasibility Modeling
4. Lane-Changing Trajectory-Planning Model
4.1. Lane-Changing Energy Consumption Cost Function
4.2. Optimal Control Combined with Quintic Polynomial for Piecewise Trajectory Planning
4.2.1. First-Segment Trajectory Planning
4.2.2. Optimal Control Solves for the First Segment of the Lane-Change Trajectory
4.2.3. Second-Segment Trajectory Planning
4.2.4. Quintic Polynomial Programming to Solve for the Second Segment of Lane-Change Trajectories
5. Results and Discussion
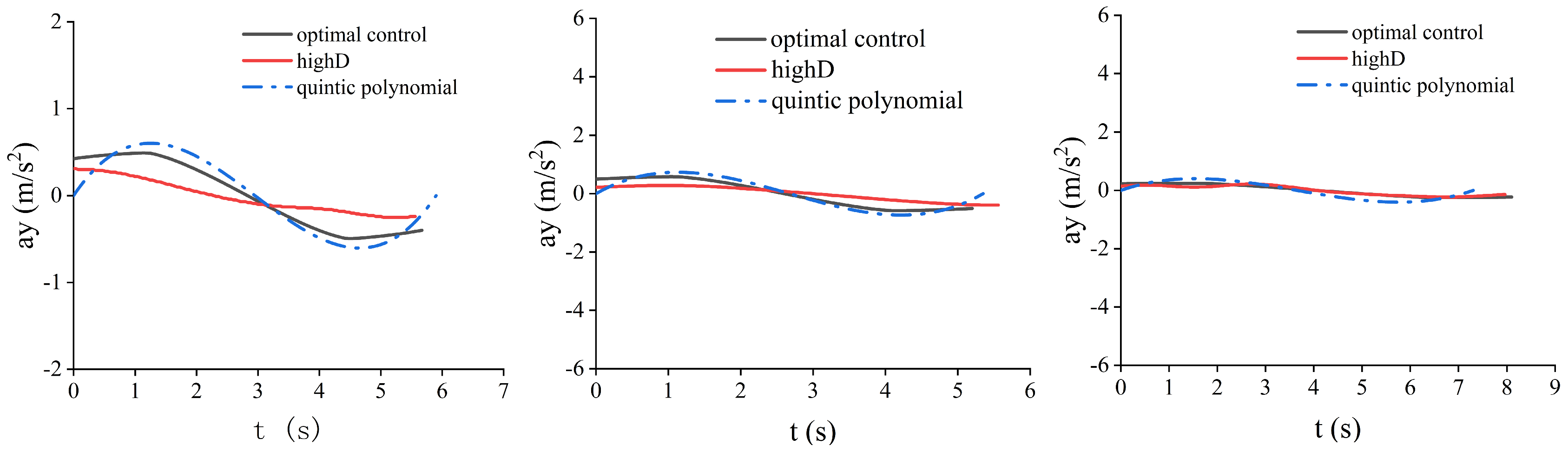
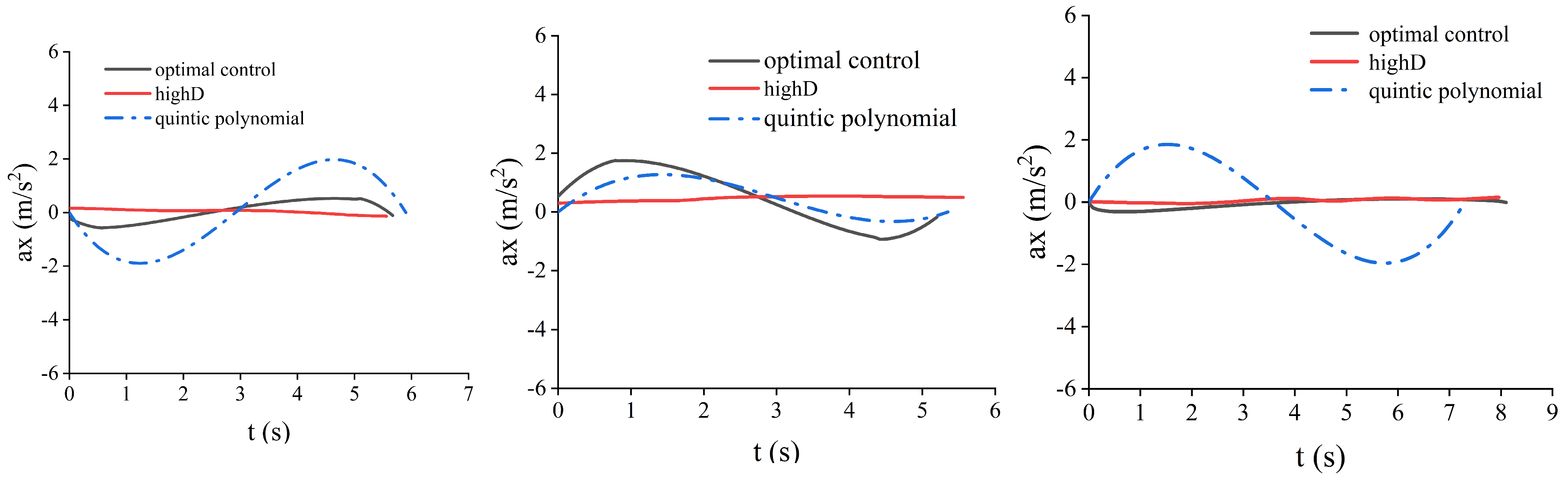
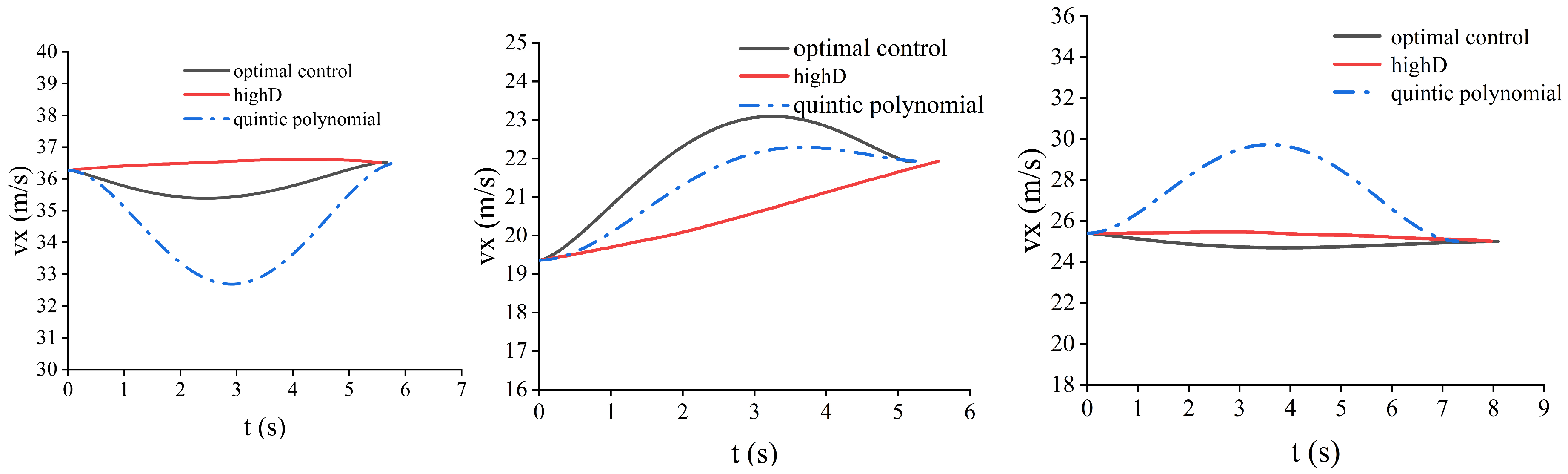
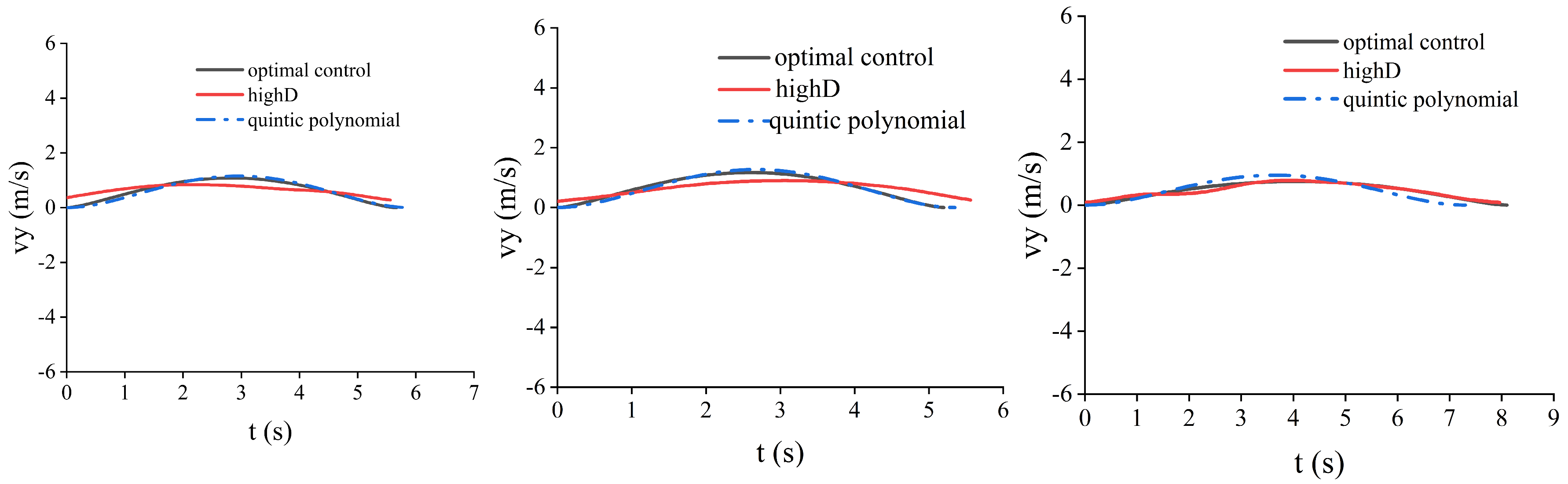
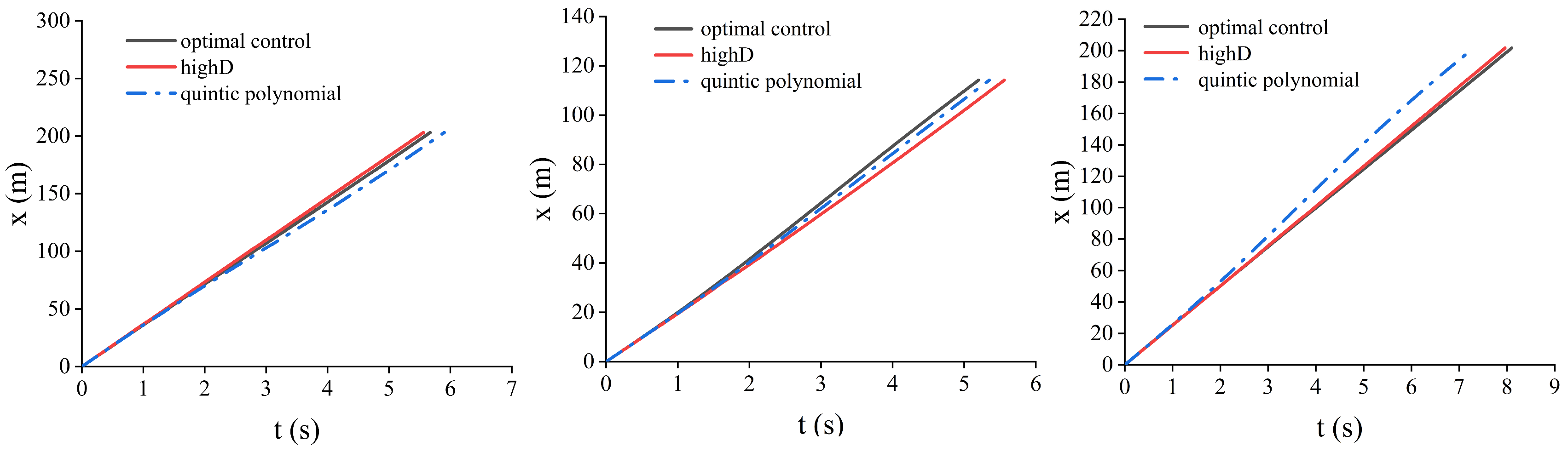
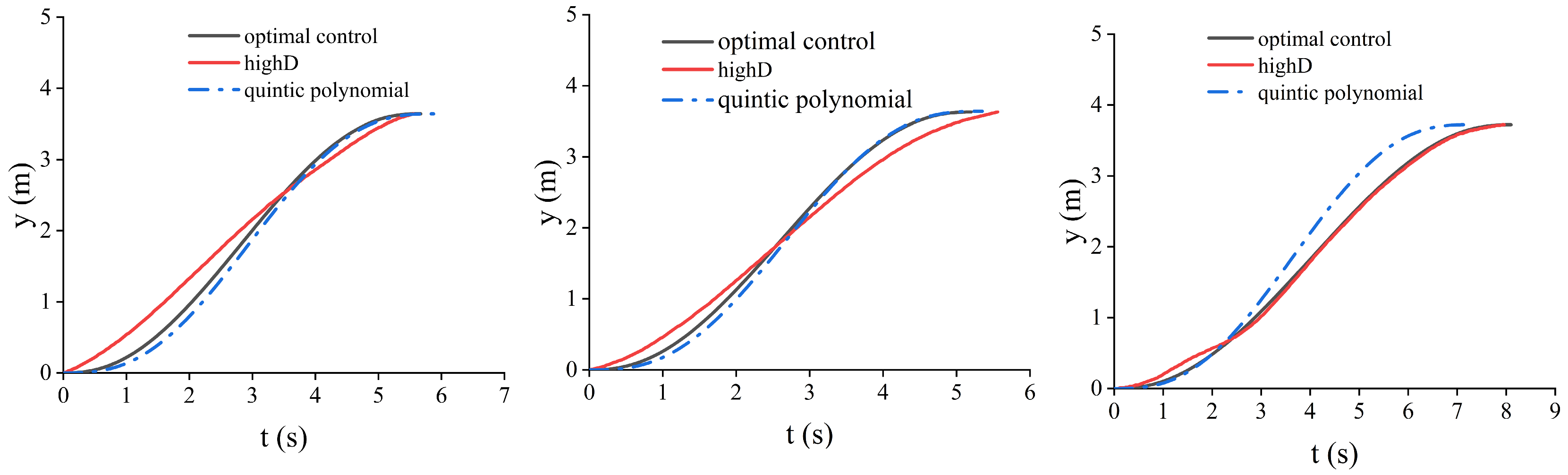
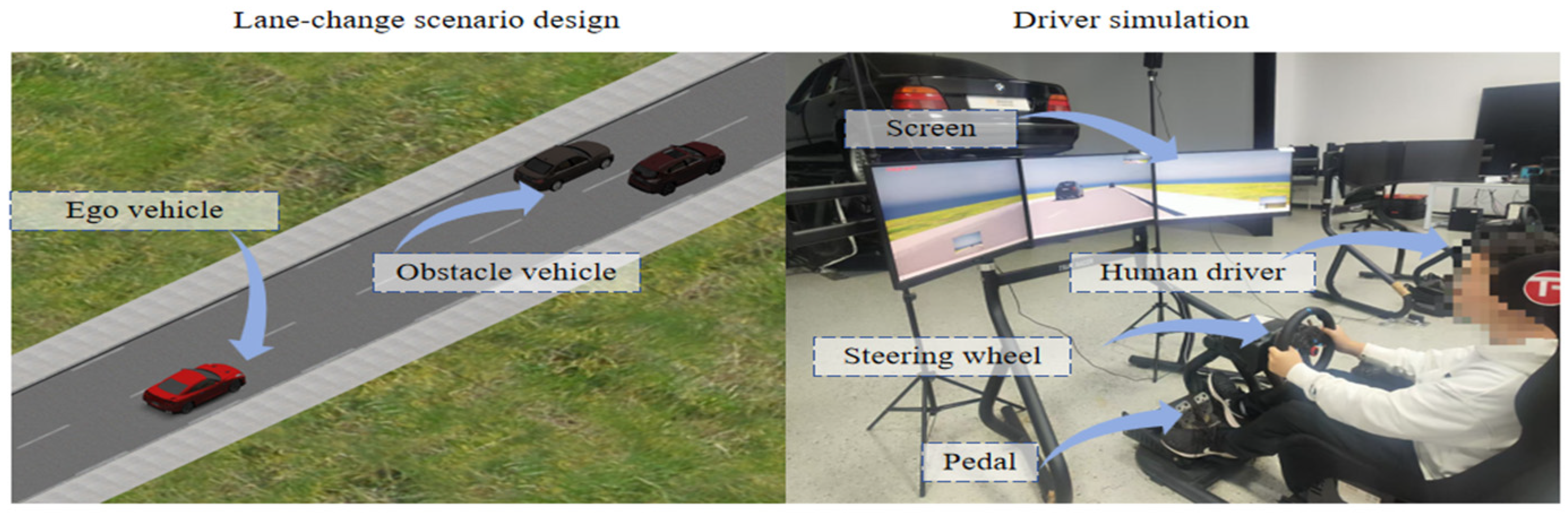
5.1. Comparative Analysis of Different Lane-Changing Algorithms and Human Driver Lane-Changing Trajectories
5.2. Sensitivity Analysis
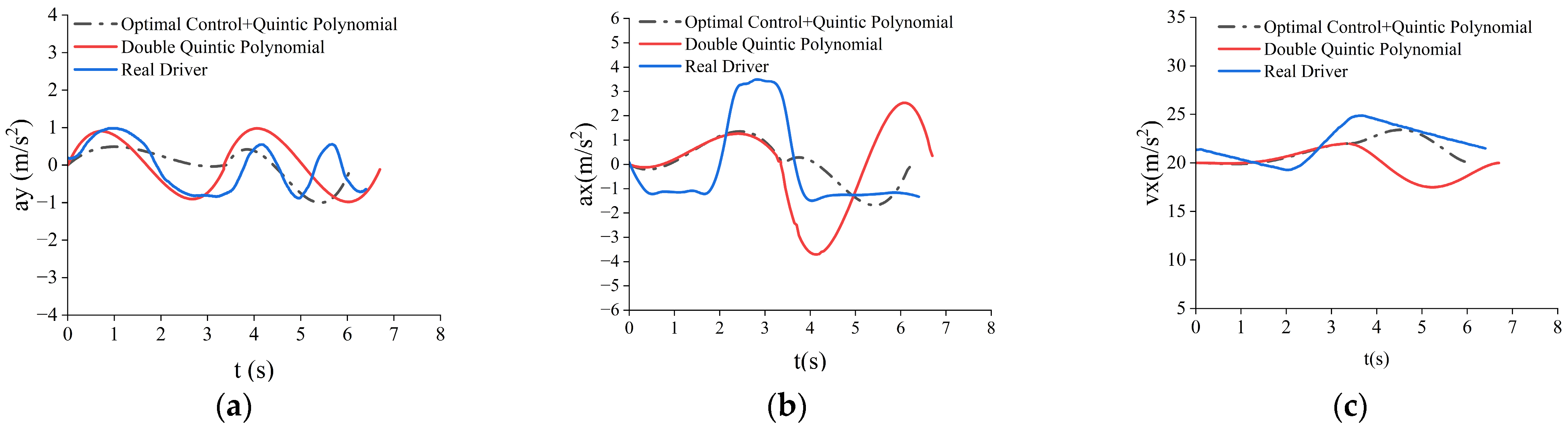
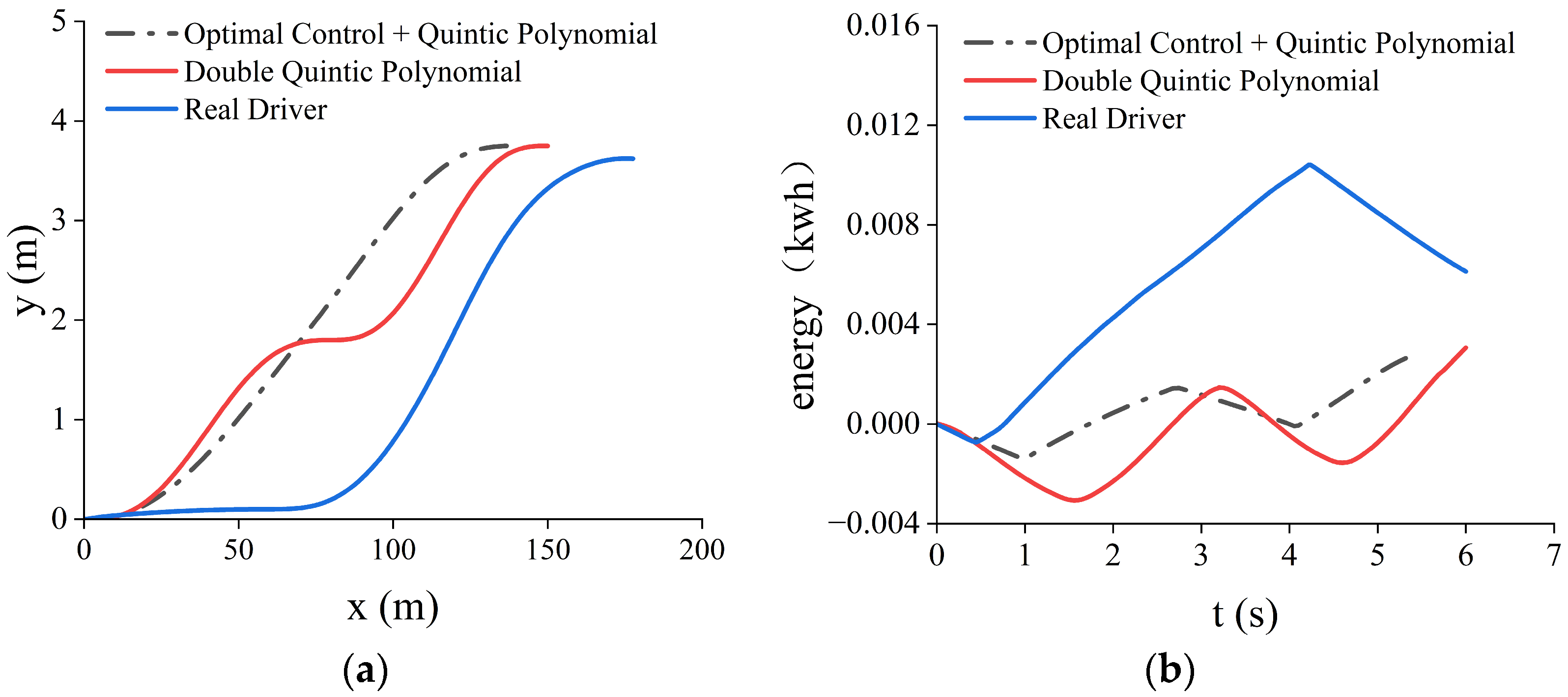
5.3. Comparative Analysis with Typical Automatic Lane-Change Models and Real Driver Lane-Change Trajectories
6. Conclusions
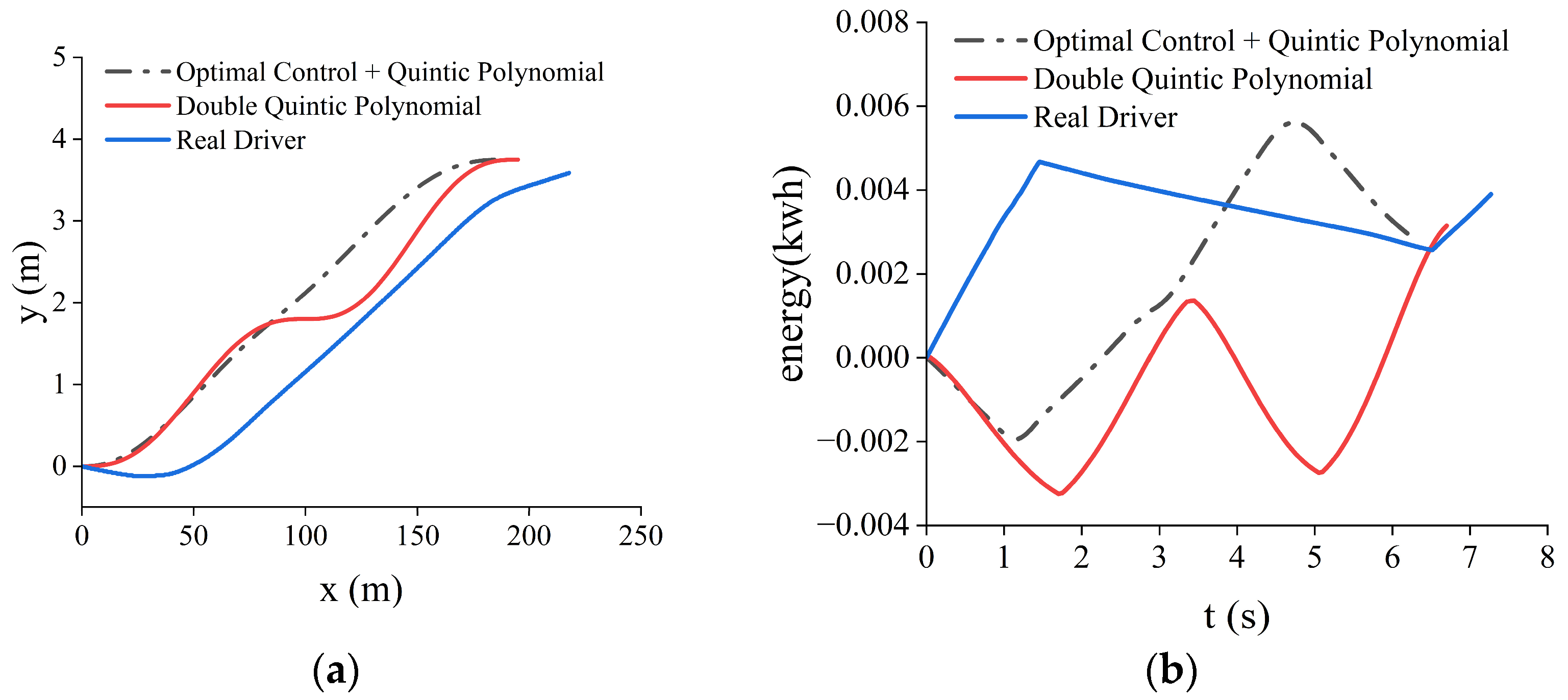
- The lane-change trajectory-planning method combining optimal control and quintic polynomials, compared with the double quintic polynomial real-time lane-change trajectory and the real-driver lane-change trajectory proposed by the previous scholars, can realize a better lane-changing economy under the premise of meeting the safety of the lane-changing process;
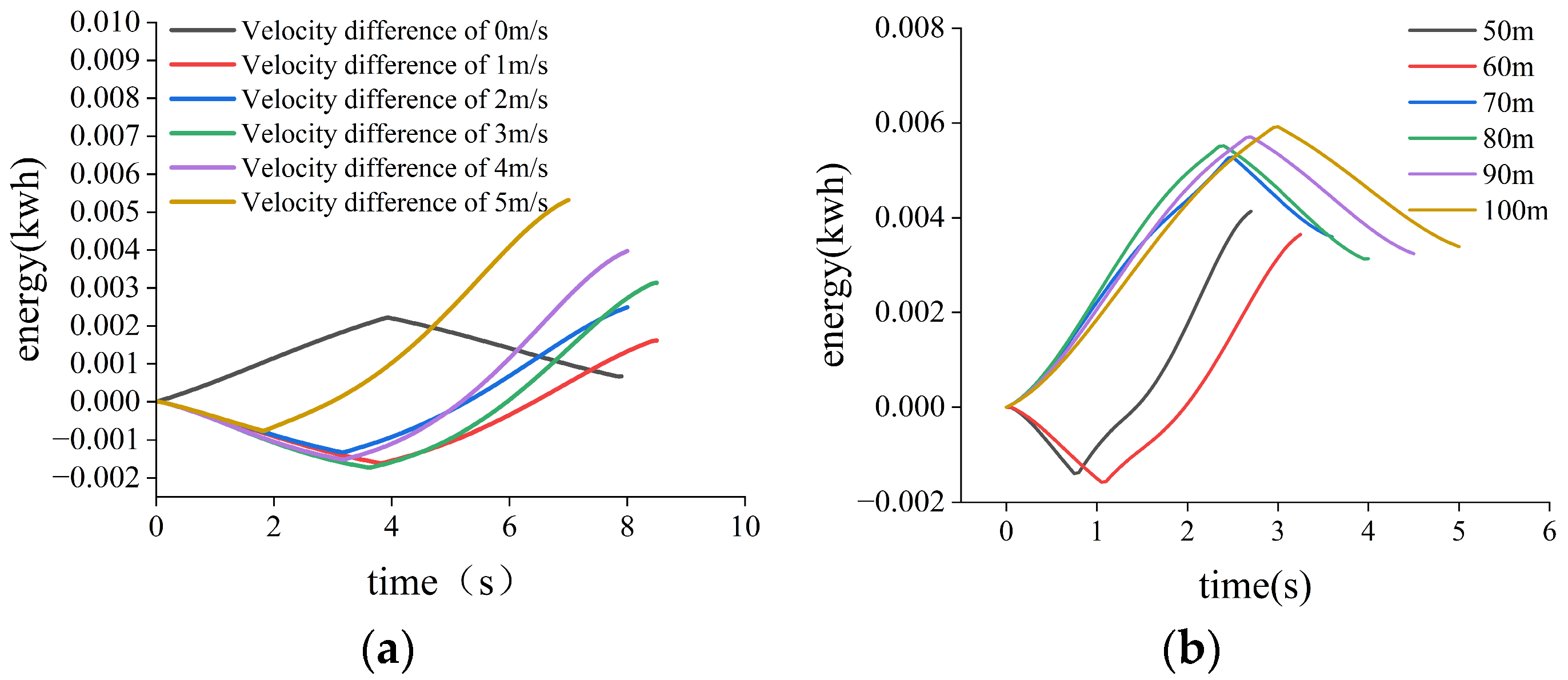
- Lane-change displacement and lane-change speed difference have a greater effect on the energy consumption of an electric vehicle. As the longitudinal displacement of the lane-change increases, the energy consumption of the lane-change firstly decreases and then increases, and the smaller the speed difference between the start point and the endpoint of the lane change, the lower the energy consumption;
- The smaller the speed difference between the start and completion of the lane change, the lower the energy consumption.
- Incorporating the effects of different vehicle dimensions and sensor measurement errors into the trajectory-planning process to enhance the generalizability and adaptability of the proposed method;
- Investigating trajectory-planning strategies under more complex traffic scenarios, such as urban intersections and multi-lane congested environments;
- Extending the current offline trajectory-planning algorithm to real-world vehicle applications and validating its real-time performance and robustness through on-road testing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


References
- He, J.; Qu, J.; Zhang, J.; He, Z. The impact of a single discretionary lane change on surrounding traffic: An analytic investigation. IEEE Trans. Intell. Transp. Syst. 2022, 24, 554–563. [Google Scholar] [CrossRef]
- Liu, P.; Jia, H.; Zhang, L.; Wang, Z. Autonomous lane-changing trajectory planning for intelligent vehicles on structured roads. J. Mech. Eng. 2023, 59, 271–281. [Google Scholar] [CrossRef]
- Li, J.; Zhou, W.; Tang, S. Adaptive fitting-based trajectory planning for lane-changing obstacle avoidance in intelligent vehicles. Automot. Eng. 2023, 45, 1174–1183. [Google Scholar] [CrossRef]
- Hu, L.; Zhong, Y.; Huang, J.; Du, R.H.; Zhang, X. Optimal vehicle path planning algorithm considering signalized intersection delay. Automot. Eng. 2018, 40, 1223–1229. [Google Scholar] [CrossRef]
- Hu, L.; Zhou, D.; Huang, J.; Du, R.; Zhang, X. Optimal path planning for electric vehicles considering signaling and energy consumption. Automot. Eng. 2021, 43, 641–649. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, Z.; Chen, R.; Ruipeng, C.; Haoyan, L.; Qi, Z.; Hui, C. A joint spatio-temporal planning method for intelligent vehicles based on improved hybrid A*. Automot. Eng. 2023, 45, 1123–1133. [Google Scholar] [CrossRef]
- Boriboonsomsin, K.; Barth, M.J.; Zhu, W.; Vu, A. Eco-routing navigation system based on multisource historical and real-time traffic information. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1694–1704. [Google Scholar] [CrossRef]
- Buzachis, A.; Celesti, A.; Galletta, A.; Wan, J.; Fazio, M. Evaluating an application-aware distributed Dijkstra shortest path algorithm in hybrid cloud/edge environments. IEEE Trans. Sustain. Comput. 2021, 7, 289–298. [Google Scholar] [CrossRef]
- Majumder, S.; Prasad, M.S. Three dimensional D* algorithm for incremental path planning in uncooperative environment. In Proceedings of the 2016 3rd International Conference on Signal Processing and Integrated Networks (SPIN) 2016, Noida, India, 11–12 February 2016; pp. 431–435. [Google Scholar] [CrossRef]
- An, L.; Chen, T.; Cheng, A.; Fang, W. Simulation of intelligent vehicle path planning based on artificial potential field algorithm. Automot. Eng. 2023, 45, 1174–1183. [Google Scholar] [CrossRef]
- Peng, X.; Xie, H.; Huang, J. Research on local path planning algorithm for driverless cars. Automotive Engineering 2020, 42, 1–10. [Google Scholar] [CrossRef]
- Taheri, E.; Ferdowsi, M.H.; Danesh, M. Fuzzy greedy RRT path planning algorithm in a complex configuration space. Int. J. Control Autom. Syst. 2018, 16, 3026–3035. [Google Scholar] [CrossRef]
- Du, M.; Mei, T.; Chen, J.; Zhao, P.; Liang, H.W.; Huang, R.L.; Tao, X. RRT-based motion planning algorithm for intelligent vehicles in complex environments. Robotics 2015, 37, 443–450. [Google Scholar] [CrossRef]
- Sun, Z.; Xia, B.; Xie, P.; Li, X.; Wang, J. NAMR-RRT: Neural adaptive motion planning for mobile robots in dynamic environments. arXiv 2024. [Google Scholar] [CrossRef]
- Akbaripour, H.; Masehian, E. Semi-lazy probabilistic roadmap: A parameter-tuned, resilient and robust path planning method for manipulator robots. Int. J. Adv. Manuf. Technol. 2017, 89, 1401–1430. [Google Scholar] [CrossRef]
- Takahashi, A.; Hongo, T.; Ninomiya, Y.; Sugimoto, G. Local path planning and motion control for AGV in positioning. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems (IROS’89): The Autonomous Mobile Robots and Its Applications 1989, Tsukuba, Japan, 4–6 September 1989; pp. 392–397. [Google Scholar] [CrossRef]
- Wang, W.; Chen, H.; Ma, J. Intelligent vehicle path tracking based on Frenet coordinate system and control delay compensation. J. Mil. Eng. 2019, 40, 2336–2351. [Google Scholar] [CrossRef]
- Ren, D.B.; Zhang, J.Y.; Zhang, J.M.; Cui, S. Trajectory planning and yaw rate tracking control for lane changing of intelligent vehicle on curved road. Sci. China Technol. Sci. 2011, 54, 630–642. [Google Scholar] [CrossRef]
- Chu, K.; Lee, M.; Sunwoo, M. Local path planning for off-road autonomous driving with avoidance of static obstacles. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1599–1616. [Google Scholar] [CrossRef]
- Tang, B.; Xu, Z.; Jiang, H.; Cai, Y.; Hu, Z.; Yang, Z. Vehicle lane-changing obstacle avoidance trajectory planning based on segmental optimization. Automot. Eng. 2022, 44, 831–841. [Google Scholar] [CrossRef]
- Deng, H.; Ma, B.; Zhao, H.; Lyu, L.; Liu, Y. Path planning and trajectory tracking control for emergency obstacle avoidance of autonomous vehicles. J. Mil. Eng. 2020, 41, 585. [Google Scholar] [CrossRef]
- Luo, Y.; Wang, Y.; Cao, K.; Li, K. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication. Transp. Res. Part C Emerg. Technol. 2016, 62, 87–102. [Google Scholar] [CrossRef]
- Niu, G.; Li, W.; Wei, H. Intelligent vehicle lane-changing trajectory planning based on double-fifth degree polynomials. Automot. Eng. 2021, 43, 978–986+1004. [Google Scholar] [CrossRef]
- Hu, L.; Yang, D.Z.; Zhang, X.; Zhang, J.; Liao, J.C. Dynamic path planning for overtaking and lane changing of intelligent vehicles based on DQP-LMPC. J. Mech. Eng. 2024, 60, 1–11. Available online: https://link.cnki.net/urlid/11.2187.TH.20240418.1524.042 (accessed on 1 February 2025).
- Chen, L.; Qin, D.; Xu, X.; Cai, Y.; Xie, J. A path and velocity planning method for lane-changing collision avoidance of intelligent vehicles based on cubic 3-D Bezier curve. Adv. Eng. Softw. 2019, 132, 65–73. [Google Scholar] [CrossRef]
- Wang, Q.; Li, D.; Zeng, J.; Peng, X.; Wei, L.; Du, W. A diagnostic method of freight wagons hunting performance based on wayside hunting detection system. Measurement 2024, 227, 114274. [Google Scholar] [CrossRef]
- Bai, Y. Research on Intelligent Vehicle Trajectory Planning Considering Economy. Doctoral Dissertation, Jilin University, Changchun, China, 2021. [Google Scholar]
- Al-Wreikat, Y.; Serrano, C.; Sodré, J.R. Driving behaviour and trip condition effects on the energy consumption of an electric vehicle under real-world driving. Appl. Energy 2021, 297, 117096. [Google Scholar] [CrossRef]
- Hu, L.; Tian, Q.; Zou, C.; Huang, J.; Ye, Y.; Wu, X. A study on energy distribution strategy of electric vehicle hybrid energy storage system considering driving style based on real urban driving data. Renew. Sustain. Energy Rev. 2022, 162, 112416. [Google Scholar] [CrossRef]
- Yao, Z.; Deng, H.; Wu, Y.; Zhao, B.; Li, G.; Jiang, Y. Optimal lane-changing trajectory planning for autonomous vehicles considering energy consumption. Expert Syst. Appl. 2023, 225, 120133. [Google Scholar] [CrossRef]
- Nie, Z.; Farzaneh, H. Energy-efficient lane-change motion planning for personalized autonomous driving. Appl. Energy 2023, 338, 120926. [Google Scholar] [CrossRef]
- Song, R.; Zhang, X.; Zhang, H.; Dai, Y.; Zhu, Y.; Tian, S. Energy-efficient lane change trajectory planning for highway traffic scenarios considering different driving needs. Appl. Sci. 2023, 13, 13184. [Google Scholar] [CrossRef]
- Sun, C.; Liu, B.; Sun, F. A review of research on energy-saving planning and control technologies for new energy vehicles. J. Automot. Saf. Energy 2022, 13, 593–616. [Google Scholar] [CrossRef]
- Ma, C.; Li, D. A review of vehicle lane change research. Phys. A Stat. Mech. Its Appl. 2023, 626, 129060. [Google Scholar] [CrossRef]
- Jula, H.; Kosmatopoulos, E.B.; Ioannou, P.A. Collision avoidance analysis for lane changing and merging. IEEE Trans. Veh. Technol. 2000, 49, 2295–2308. [Google Scholar] [CrossRef]
- Ding, H.; Li, W.; Xu, N.; Zhang, J. An enhanced eco-driving strategy based on reinforcement learning for connected electric vehicles: Cooperative velocity and lane-changing control. J. Intell. Connect. Veh. 2022, 5, 316–332. [Google Scholar] [CrossRef]
- Mehlig, D.; Staffell, I.; Stettler, M.; ApSimon, H. Accelerating electric vehicle uptake favours greenhouse gas over air pollutant emissions. Transp. Res. Part D Transp. Environ. 2023, 124, 103954. [Google Scholar] [CrossRef]
- Zhao, S.J.; Heywood, J.B. Projected pathways and environmental impact of China’s electrified passenger vehicles. Transp. Res. Part D Transp. Environ. 2017, 53, 334–353. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Krajewski, R.; Bock, J.; Kloeker, L.; Eckstein, L. The highD dataset: A drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2118–2125. [Google Scholar] [CrossRef]
- Guo, Y.; Su, Y.; Fu, R.; Yuan, W. Influence of lane-changing maneuvers on passenger comfort of intelligent vehicles. China J. Highw. Transp. 2022, 35, 221–230. [Google Scholar] [CrossRef]
- Nissan, L. Nissan Leaf; Nissan Corporation: Yokohama, Japan, 2010. [Google Scholar]
- Li, S.; Zhang, M. Research on intelligent vehicle lane-changing path planning based on double-fifth degree polynomials. J. Nanjing Univ. Inf. Eng. 2024, 16, 155–163. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Longitudinal Distance (m) | Lateral Distance (m) | Longitudinal Starting Velocity (m/s) | Longitudinal Terminal Velocity (m/s) | Lateral Starting Velocity (m/s) | Lateral Terminal Velocity (m/s) |
|---|---|---|---|---|---|---|
| Scene 1 | 203.06 | 3.64 | 36.27 | 36.52 | 0.00 | 0.00 |
| Scene 2 | 114.16 | 3.63 | 19.36 | 21.93 | 0.00 | 0.00 |
| Scene 3 | 201.61 | 3.72 | 25.4 | 25.01 | 0.08 | 0.08 |
| Quintic Polynomial | Optimal Control | highD | ||
|---|---|---|---|---|
| Scene 1 | Energy consumption (kwh) | 4.09 × 10−3 | 3.87 × 10−3 | 7.36 × 10−3 |
| Time(s) | 5.6 | 5.6 | 5.9 | |
| Scene 2 | Energy consumption (kwh) | 4.98 × 10−3 | 4.75 × 10−3 | 8.37 × 10−3 |
| Time(s) | 5.35 | 5.2 | 5.56 | |
| Scene 3 | Energy consumption (kwh) | 2.89 × 10−3 | 1.97 × 10−3 | 6.60 × 10−3 |
| Time (s) | 7.25 | 7.91 | 7.96 |
| Parameters | Double Quintic Polynomial | Optimal Control + Quintic Polynomial | Real Driver | |
|---|---|---|---|---|
| Scene 1 | Energy consumption (kwh) | 3.22 × 10−3 | 2.76 × 10−3 | 6.12 × 10−3 |
| Time (s) | 5.4 | 6 | 6 | |
| Scene 2 | Energy consumption (kwh) | 3.16 × 10−3 | 2.83 × 10−3 | 3.91 × 10−3 |
| Time (s) | 6.7 | 6.28 | 7.26 | |
| Scene 3 | Energy consumption (kwh) | 3.097 × 10−3 | 2.646 × 10−3 | 4.439 × 10−3 |
| Time (s) | 6.7 | 6.1 | 6.4 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, L.; Wang, J.; Huang, J.; Wong, P.K.; Zhao, J. Lane Change Trajectory Planning for Intelligent Electric Vehicles in Dynamic Traffic Environments: Aiming at Optimal Energy Consumption. Sustainability 2025, 17, 4235. https://doi.org/10.3390/su17094235
Hu L, Wang J, Huang J, Wong PK, Zhao J. Lane Change Trajectory Planning for Intelligent Electric Vehicles in Dynamic Traffic Environments: Aiming at Optimal Energy Consumption. Sustainability. 2025; 17(9):4235. https://doi.org/10.3390/su17094235
Chicago/Turabian StyleHu, Lin, Jie Wang, Jing Huang, Pak Kin Wong, and Jing Zhao. 2025. "Lane Change Trajectory Planning for Intelligent Electric Vehicles in Dynamic Traffic Environments: Aiming at Optimal Energy Consumption" Sustainability 17, no. 9: 4235. https://doi.org/10.3390/su17094235
APA StyleHu, L., Wang, J., Huang, J., Wong, P. K., & Zhao, J. (2025). Lane Change Trajectory Planning for Intelligent Electric Vehicles in Dynamic Traffic Environments: Aiming at Optimal Energy Consumption. Sustainability, 17(9), 4235. https://doi.org/10.3390/su17094235