1. Introduction
As urban traffic conditions become increasingly complex, driving behavior plays a critical role in road safety. Drivers are central to the traffic system, and unsafe driving behaviors—such as rapid acceleration, frequent deceleration, and speeding—are key contributors to traffic accidents [
1,
2,
3,
4]. These behaviors can be influenced by a range of factors, including vehicle performance characteristics, traffic flow, and driver habits. Particularly in real-world urban environments with frequent stops, variable speed limits, and high vehicle density, drivers may exhibit irregular or unsafe behavior patterns that require attention. Therefore, developing a scientifically sound and practical method to evaluate driving behavior safety can help provide timely feedback to drivers and reduce the likelihood of risk-inducing behaviors on the road.
Driving behavior has attracted growing international attention, as it reflects the continuous interaction between the driver, vehicle, and environment [
5,
6]. Recent studies have emphasized the impact of specific road contexts—such as proximity to intersections—on driving behavior. For instance, Tawfeek and El-Basyouny proposed a context identification layer in driver assistance systems to distinguish behavior near intersections [
7], while their follow-up work further quantified behavioral differences during braking based on location, indicating drivers tend to behave more aggressively near intersections [
8]. Driver behavior is fundamentally shaped by individual habits, skills, and internal states. To assess safety, driver profiling typically involves collecting vehicle dynamics data (e.g., speed, acceleration, and trajectory) over time and applying computational models for evaluation [
9]. Driver behavior analysis typically involves identifying risky events, quantifying safe driving frequency, and evaluating safety based on driving strategies [
10].
However, research on driving behavior safety evaluation still faces numerous challenges, and a unified evaluation framework has yet to be established [
11]. To address this issue, some studies have focused on the correlation between different driving behaviors by mining in-vehicle data collected through traditional onboard recorders, such as vehicle speed and acceleration [
12]. These works extract feature variables and utilize association analysis to explore frequent co-occurring patterns that reflect potential risk factors. Qu et al. and Kong used the NDS and USDOT datasets to extract association rules that reveal factors affecting crash severity and hidden links among travel behavior, road features, and speeding [
13,
14]. Sun and Das et al. applied the Apriori algorithm to explore associations between negligent behaviors and external factors, including fog visibility and poor lane-keeping, aiming to reduce road-departure crashes in low-visibility conditions [
15,
16].
In addition to the above correlation-based methods, another line of research explores scoring frameworks by selecting or designing driving behavior evaluation indicators. Scholars initially relied heavily on statistical questionnaires or direct feature screening from driving datasets to formulate scoring models for safety evaluation [
17,
18]. Faria et al. and Kinnear assessed driver behavior by combining questionnaires and driving simulations, aiming to support behavior classification and improvement [
19,
20]. However, such survey-based methods face limitations related to subjectivity and potential inaccuracies in driver-reported responses. To address this, Eusofe and Zhang applied the Analytic Hierarchy Process (AHP) and Principal Component Analysis (PCA) to perform more objective and efficient evaluation of driving behavior [
21,
22]. Nonetheless, methods like AHP may still introduce subjectivity in the weighting of indicators and fail to account for inter-indicator relationships.
To overcome the limitations of traditional evaluation methods, recent studies have increasingly embraced machine learning algorithms to construct data-driven, objective evaluation models. For instance, Chong et al. proposed a rule-based neural network model to simulate drivers’ longitudinal and lateral control behaviors in safety-critical scenarios [
23]. While powerful, such models often depend on carefully selected fuzzy membership functions, requiring multiple rounds of validation. An increase in feature variables leads to more fuzzy rules, resulting in higher computational complexity and longer runtimes [
24]. Yu et al. utilized the random forest algorithm to model braking behavior and computed feature importance scores to identify dominant factors [
25]. Their findings also highlighted that model performance was sensitive to the training-test ratio and number of decision trees used. In addition, a variety of other machine learning methods—such as Support Vector Machines (SVM), XGBoost, Classification and Regression Trees, and Multilayer Logistic Regression—have been applied in driving behavior safety research to enhance model adaptability and robustness [
26,
27,
28,
29].
Although progress has been made in evaluating driving behavior and correlations, existing methods face several limitations. In particular, machine learning models are sensitive to data partitioning and struggle with complexity when handling large-scale, high-dimensional driving data [
30,
31,
32]. This leads to longer computation times and higher demands on computer performance. Regarding driving behavior correlation analysis, traditional in-vehicle data collection systems have been extensively applied in analyzing driver behavior, and recent developments such as connected vehicle technologies (e.g., V2I communication) have further enhanced their data acquisition capabilities [
33]. However, these systems may still face limitations when it comes to capturing high-frequency, multidimensional signals—such as real-time trajectory tracking and rapid behavioral transitions—especially under complex urban traffic conditions. Moreover, Apriori repeatedly rescans high-frequency datasets to compute itemset support, generating excessive candidate sets and leading to redundancy in indicator selection [
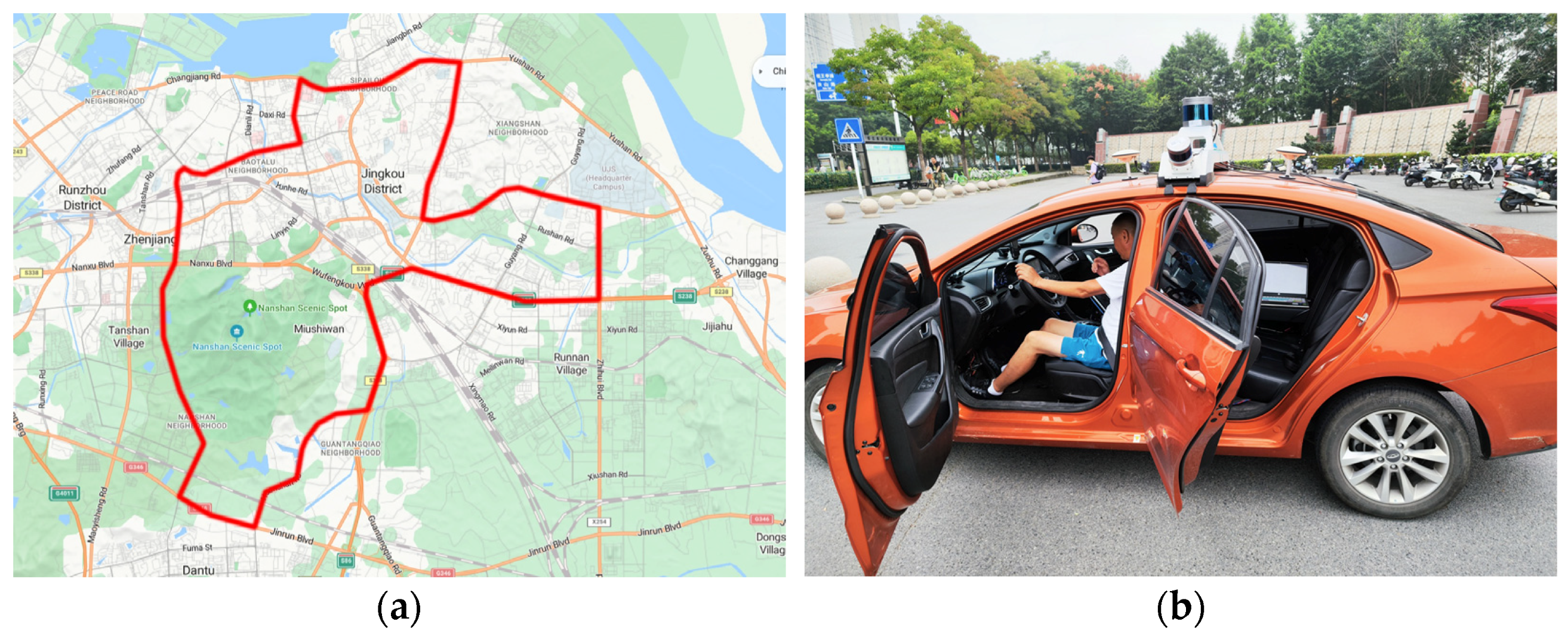
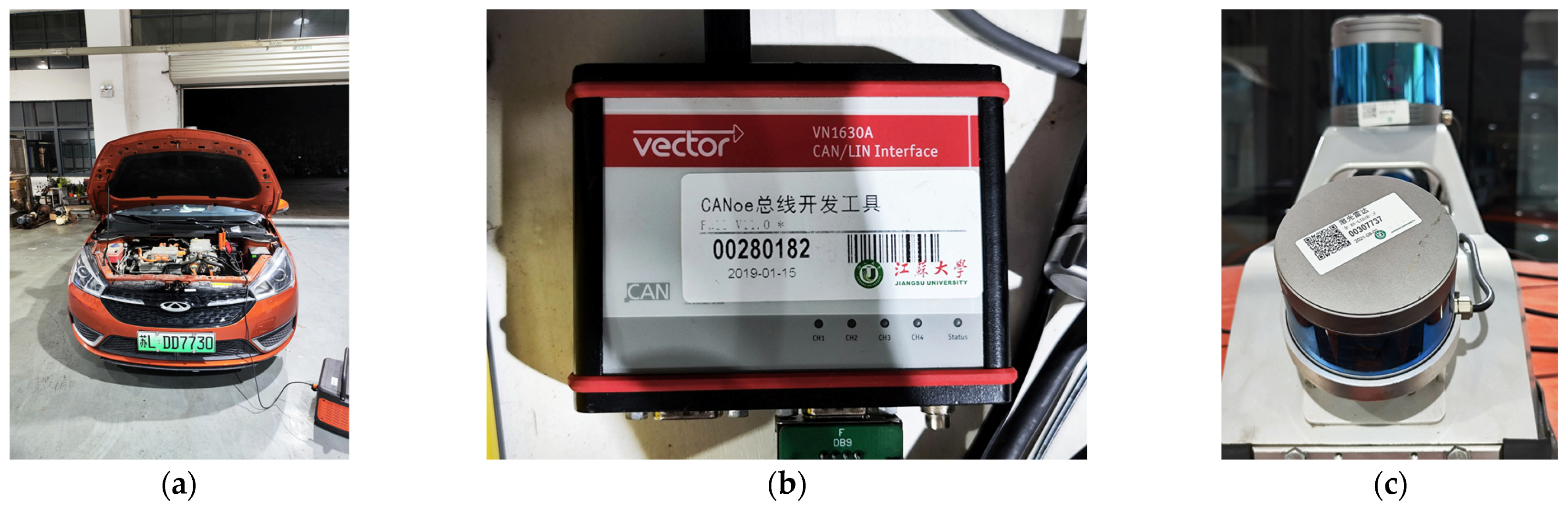
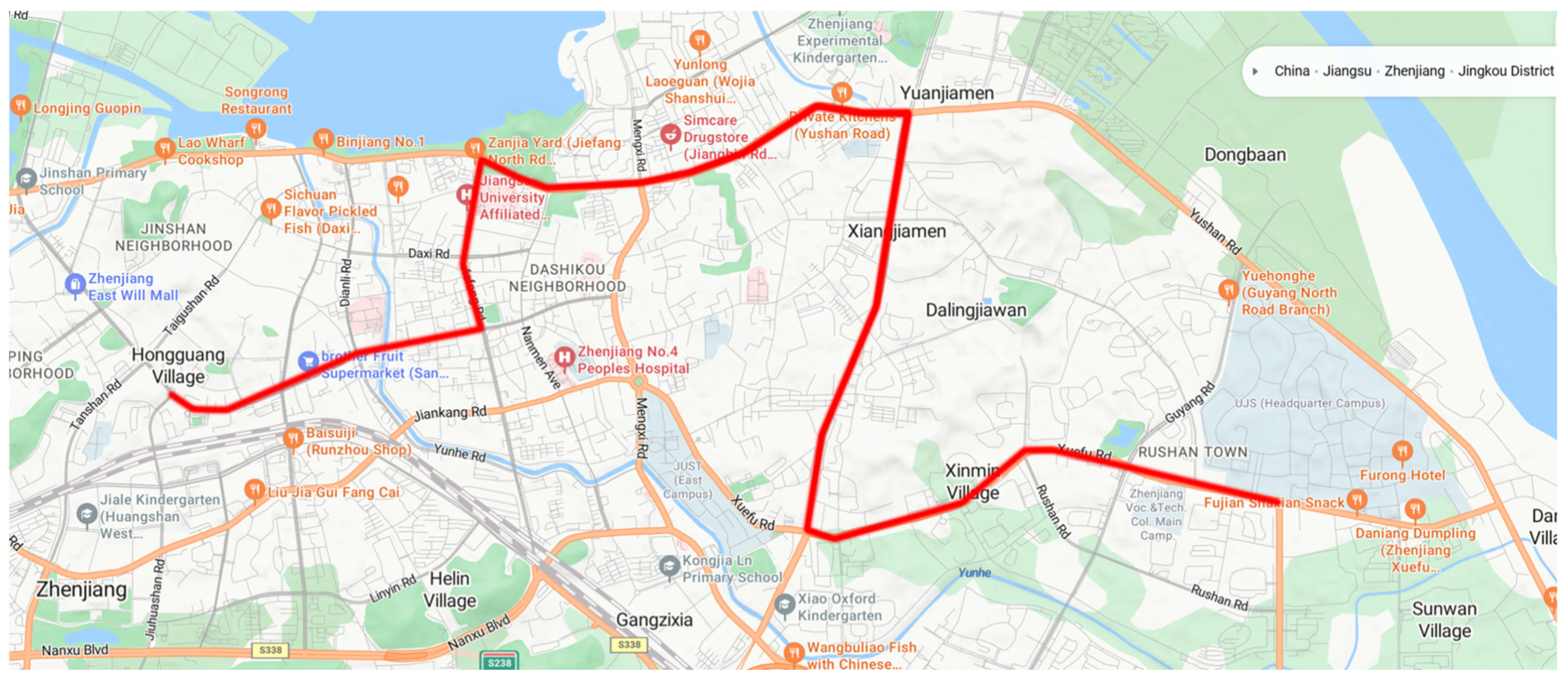
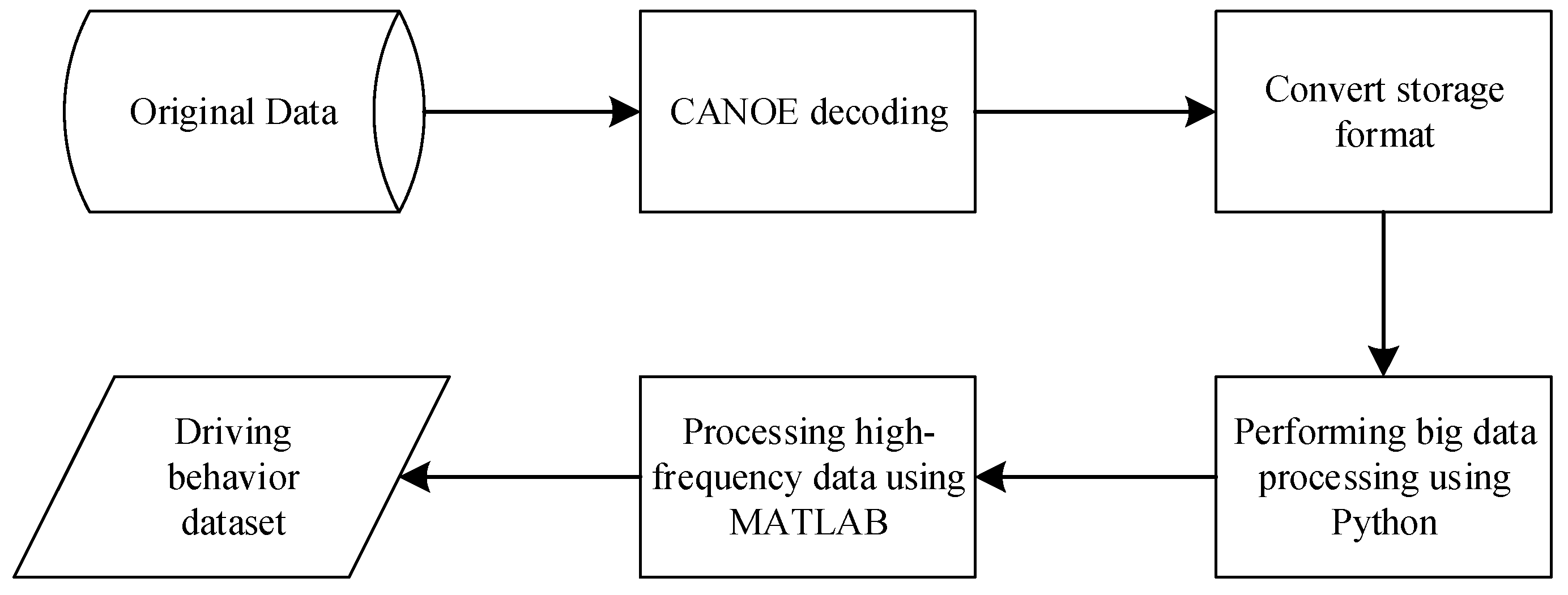
34,
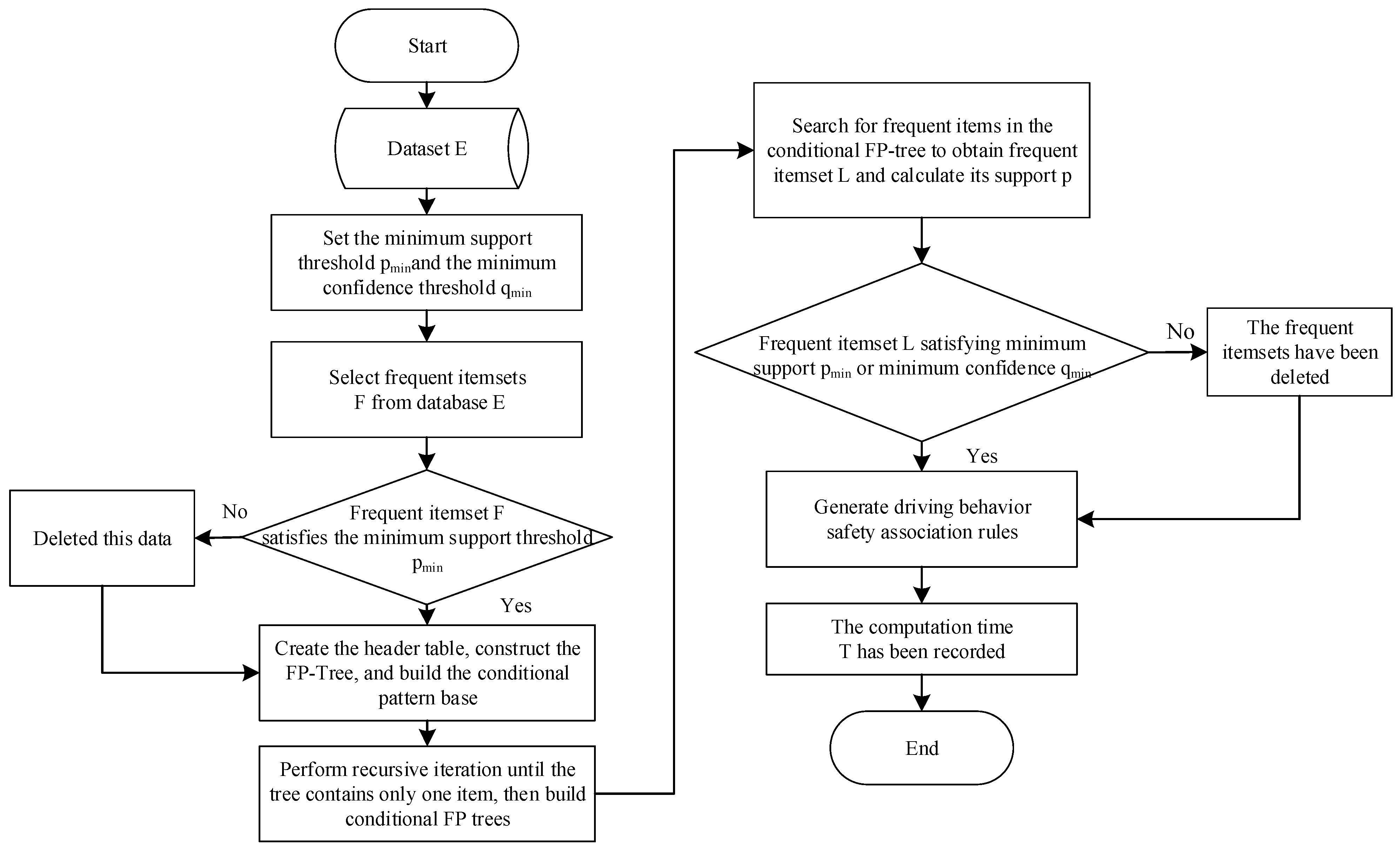
35]. Therefore, this study uses high-frequency urban driving data from real-world experiments—including vehicle signals and GPS-inertial information—to enable precise vehicle localization and in-depth safety analysis. By setting thresholds for driving behavior safety evaluation indicators, this study applies the Frequent Pattern Growth (FP-growth) algorithm to driving behavior correlation analysis for the first time [
36]. Unlike Apriori, the FP-growth algorithm constructs a compact FP-tree to efficiently mine frequent itemsets without repeated database scans. Combined with threshold-based indicator weighting, it enables quantitative evaluation of individual driving behaviors, facilitating clear differentiation between safe and unsafe drivers. This approach enhances both accuracy and interpretability compared to traditional machine learning models.
This study aims to uncover latent relationships among unsafe driving behaviors by addressing the limitations of prior research. Leveraging high-frequency real-world driving data from urban environments, it employs the FP-growth algorithm to mine associations among key safety evaluation indicators. Unlike traditional methods that focus solely on individual indicators or rely heavily on machine learning black-box models, this study introduces an interpretable pattern-mining framework that integrates FP-growth with threshold-based scoring to uncover co-occurring risk behaviors. This approach enables both quantitative safety evaluation and transparent behavioral rule discovery, which is rarely addressed in prior driving behavior studies. Accordingly, this study proposes a method to evaluate and enhance driving behavior with the aim of improving road safety. The remainder of this paper is organized as follows:
Section 2 describes the data collection and preprocessing procedures, as well as the selection of safety evaluation indicators, correlation modeling, and the proposed evaluation framework.
Section 3 presents a comparative analysis using driver behavior data and safety scores to validate the method.
Section 4 concludes with the study’s key findings and limitations.
4. Conclusions
4.1. Main Conclusions
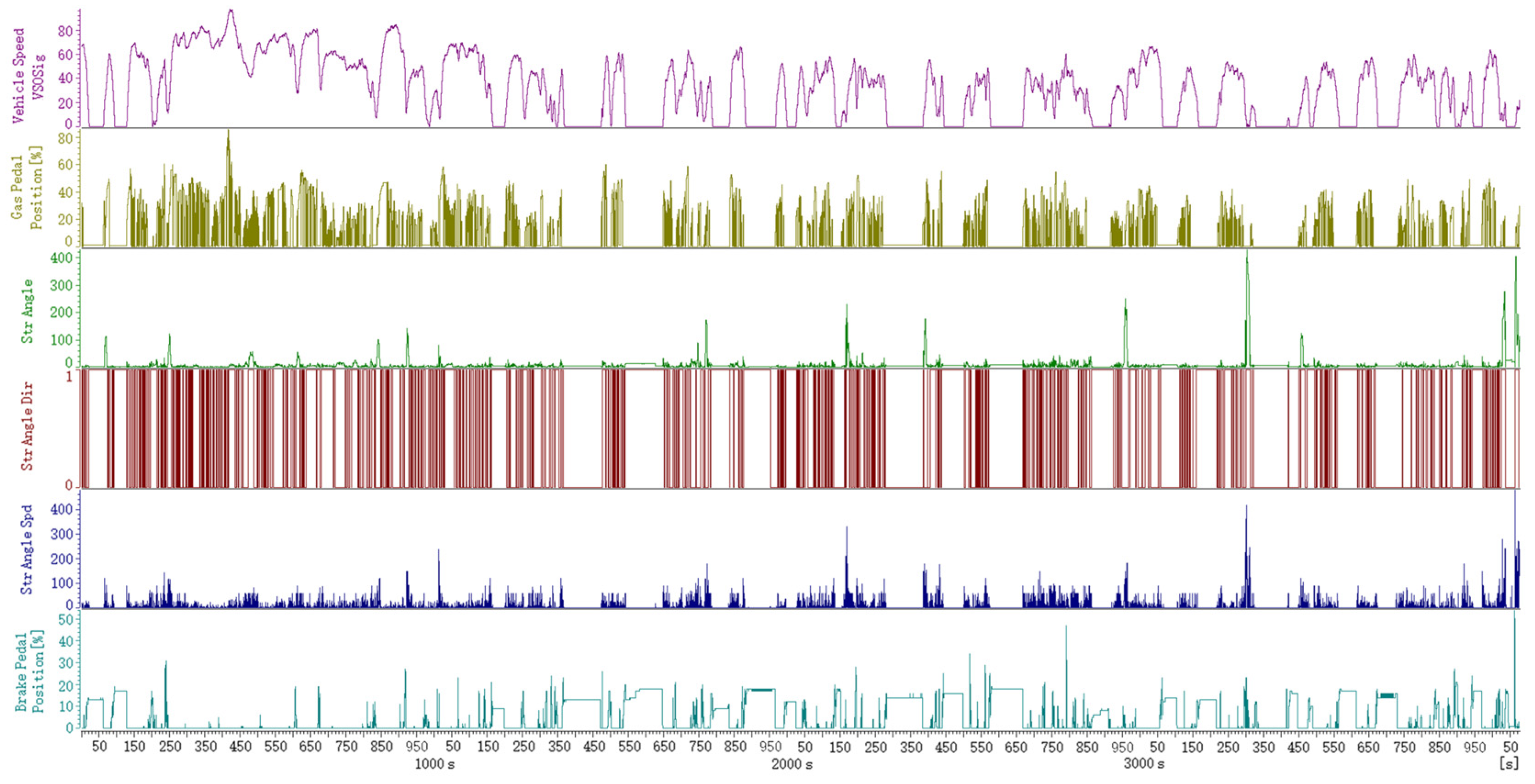
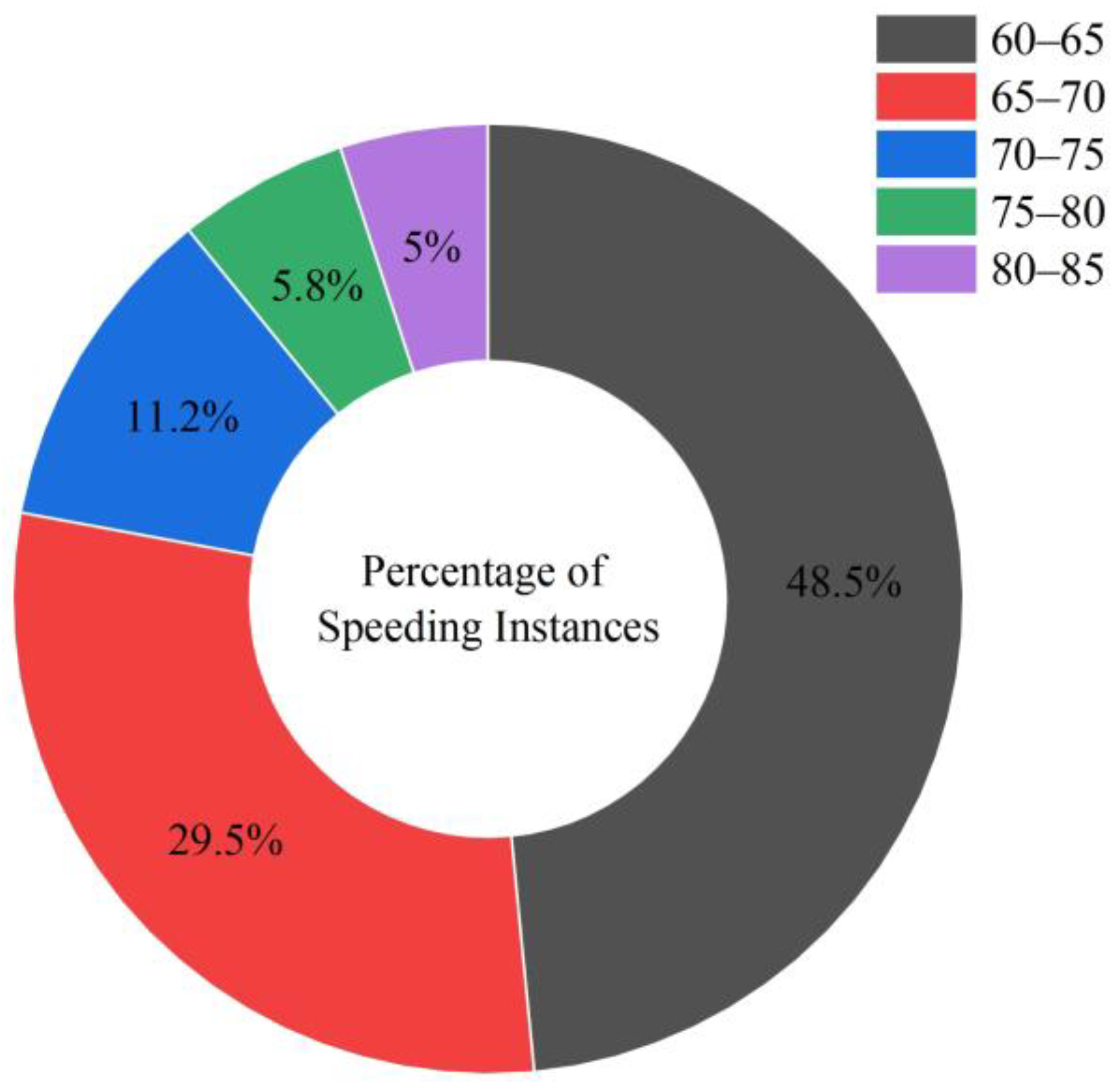
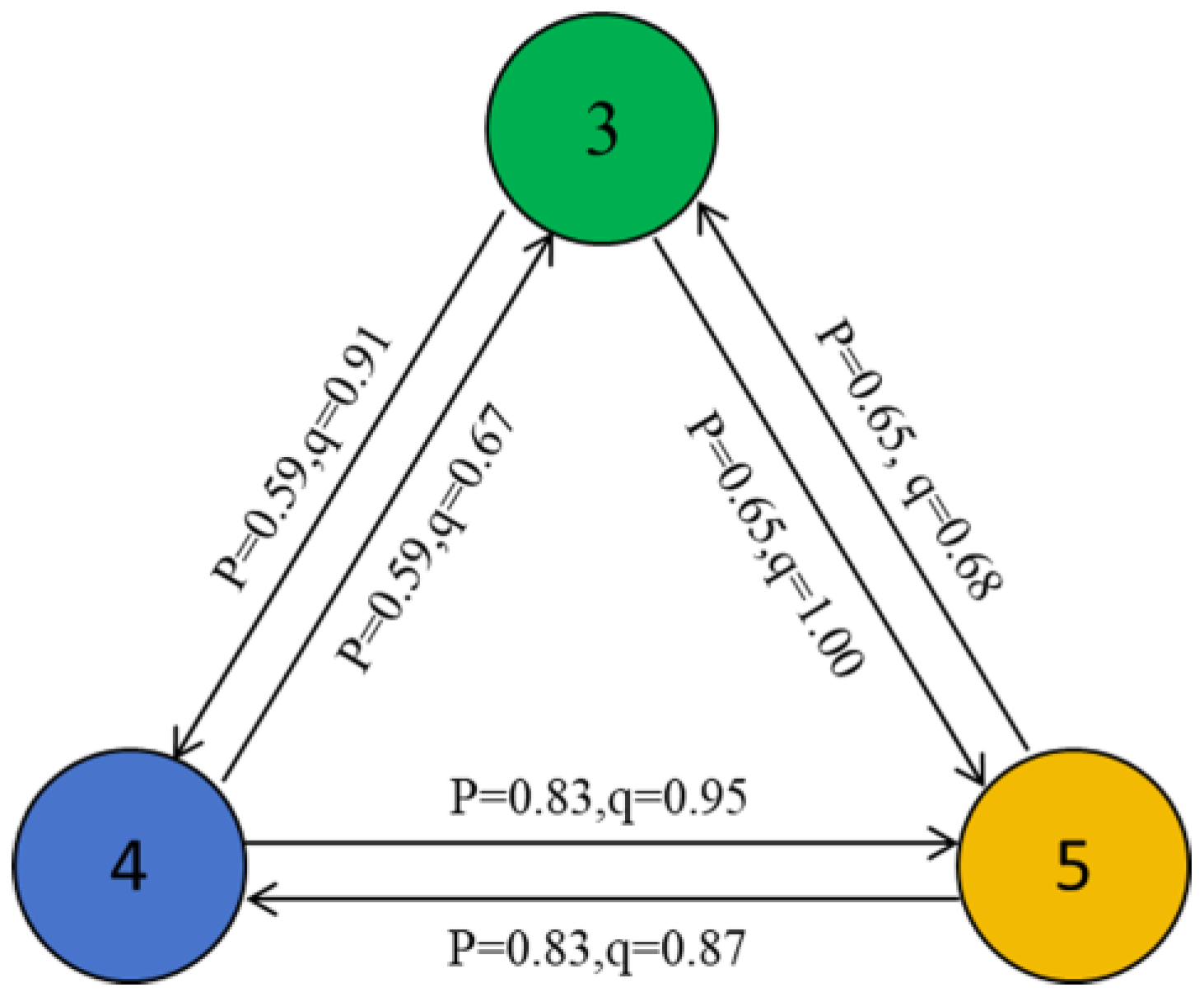
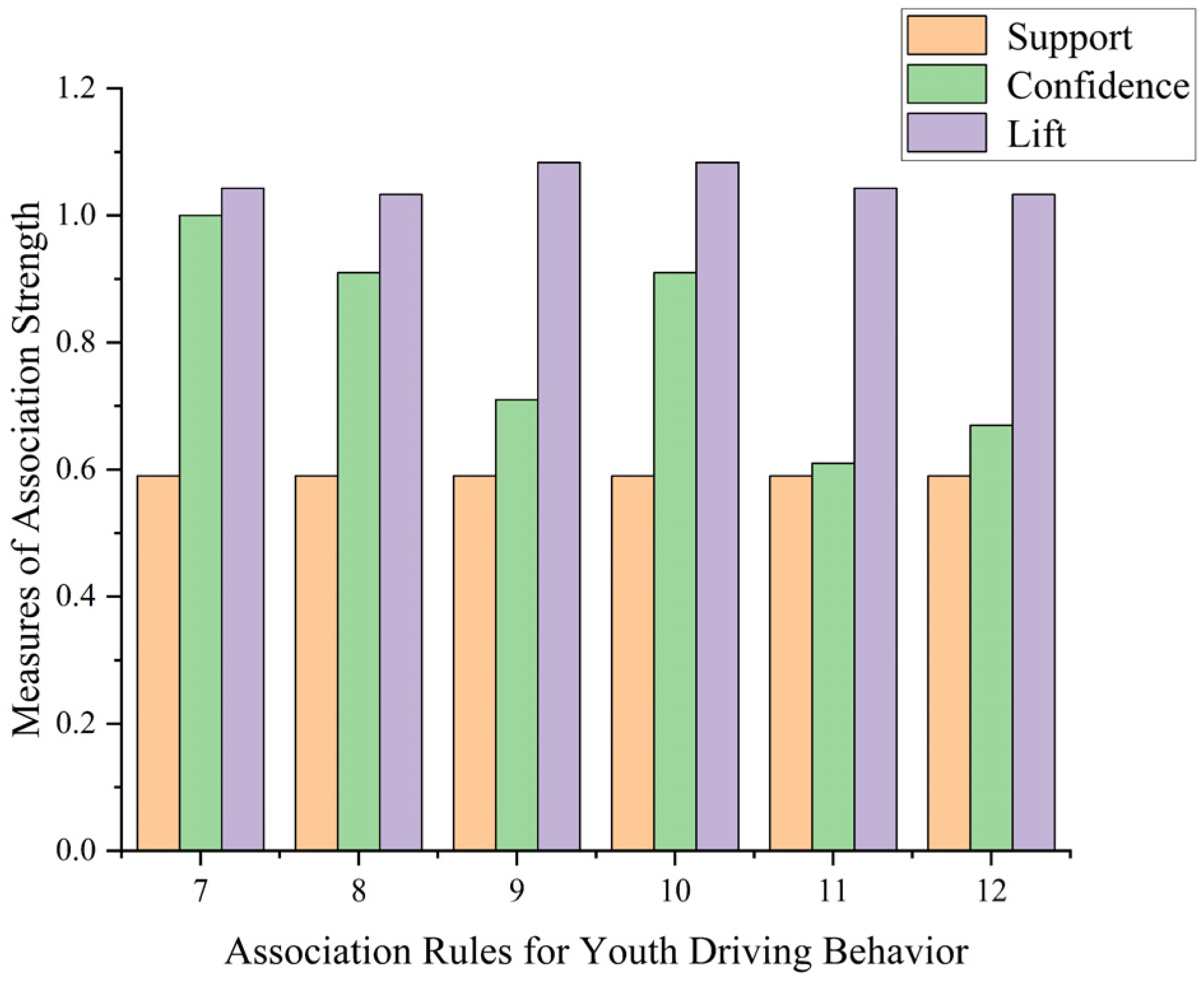
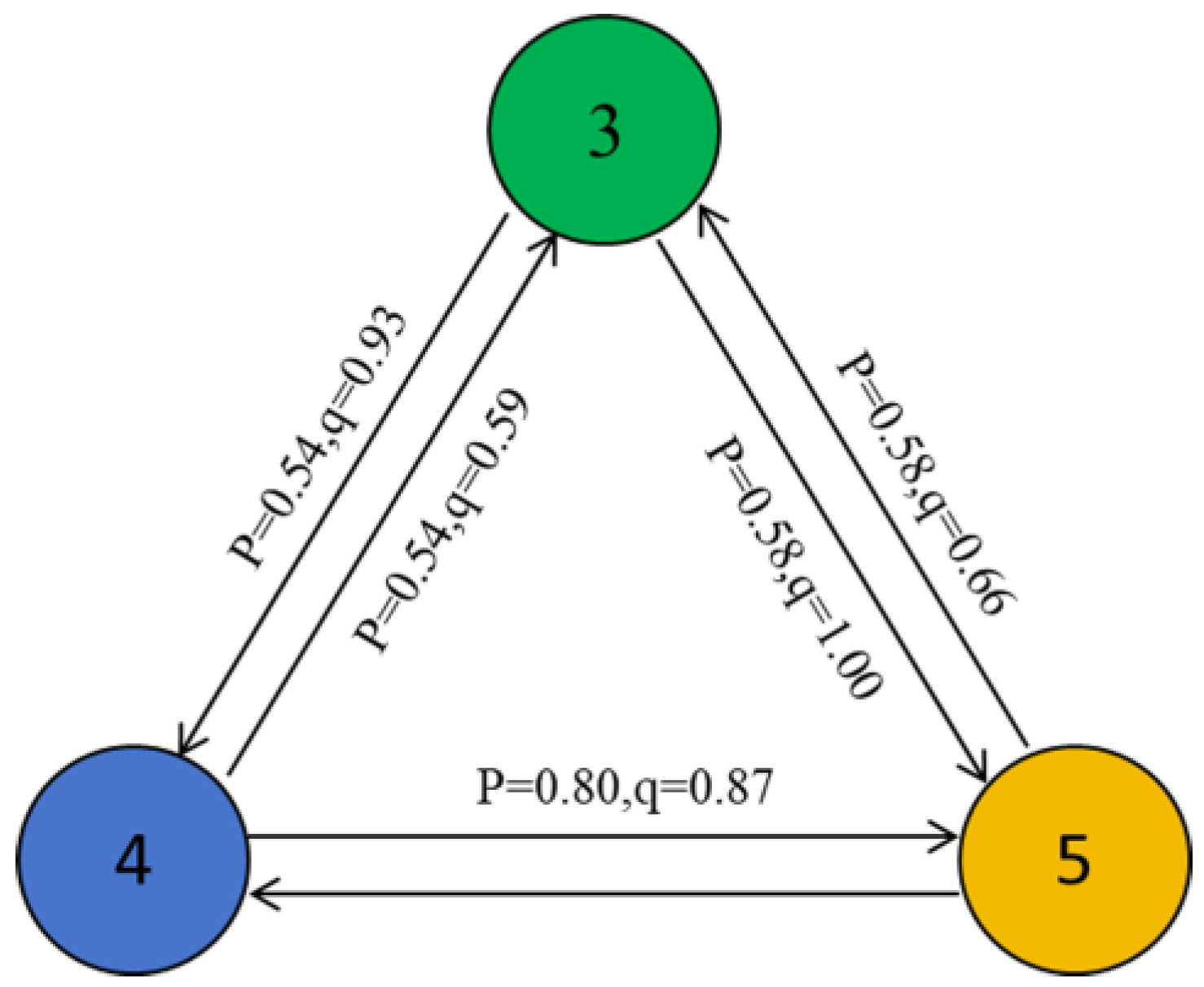
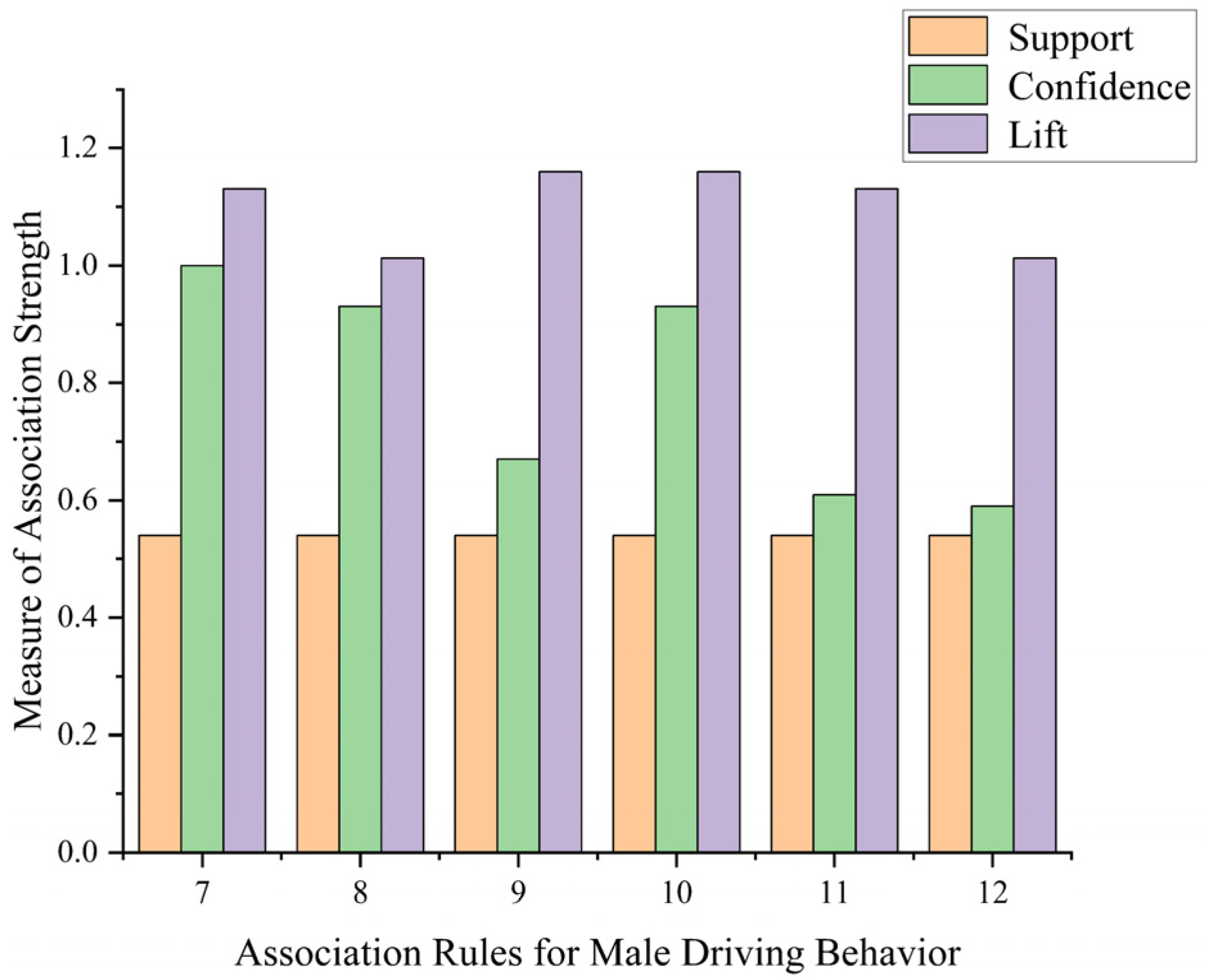
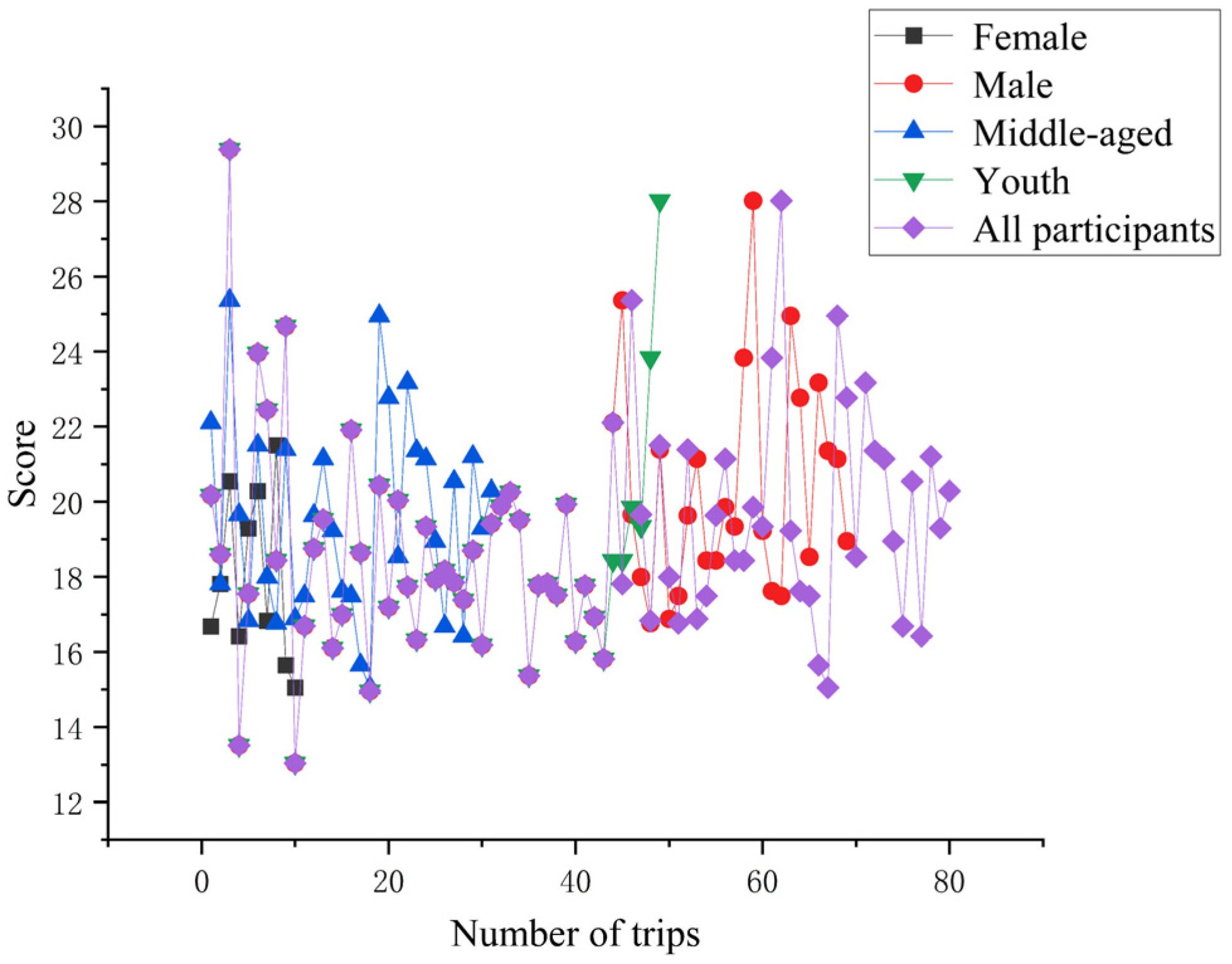
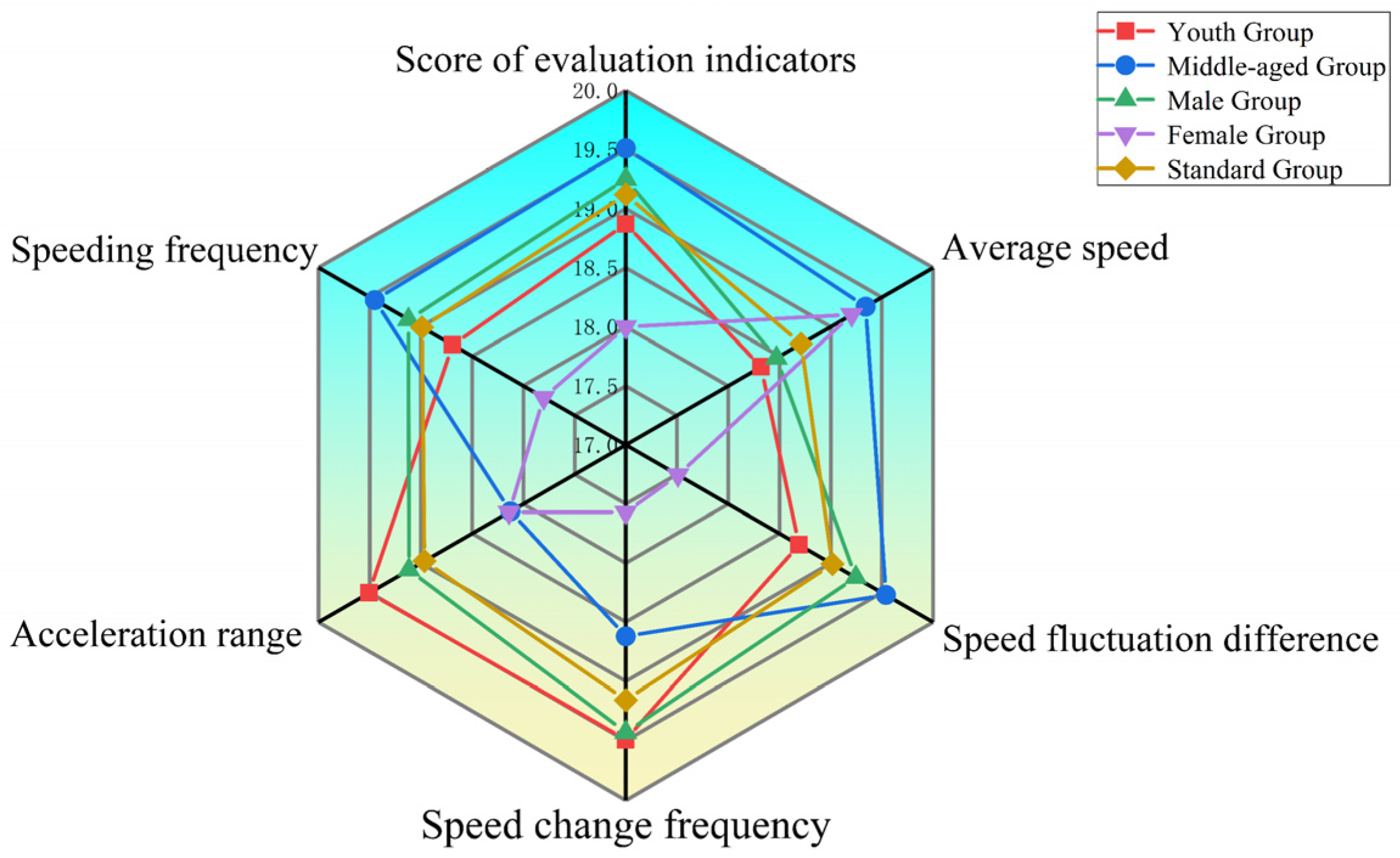
This study collected authentic and comprehensive data on urban high-frequency driving behavior through real-world experiments. Five safety evaluation indicators for driving behavior, along with their thresholds, were chosen. The FP-growth association rule method is employed to model driving behavior and explore the interactions between different unsafe driving behaviors. The findings revealed that unsafe driving behaviors do not occur independently within a single trip; rather, multiple unsafe tendencies may co-occur in terms of the selected aggregated indicators, collectively affecting the driver’s safety. Based on the proposed evaluation method, unsafe driving behaviors were quantitatively assessed, with higher scores indicating greater risk. Safety scores were computed for drivers of different age and gender groups, followed by targeted analysis. Results showed that male drivers and younger drivers exhibited greater score variability than female and middle-aged drivers, suggesting notable differences in driving behavior characteristics. Speeding behavior was found to have the most significant impact on overall safety scores.
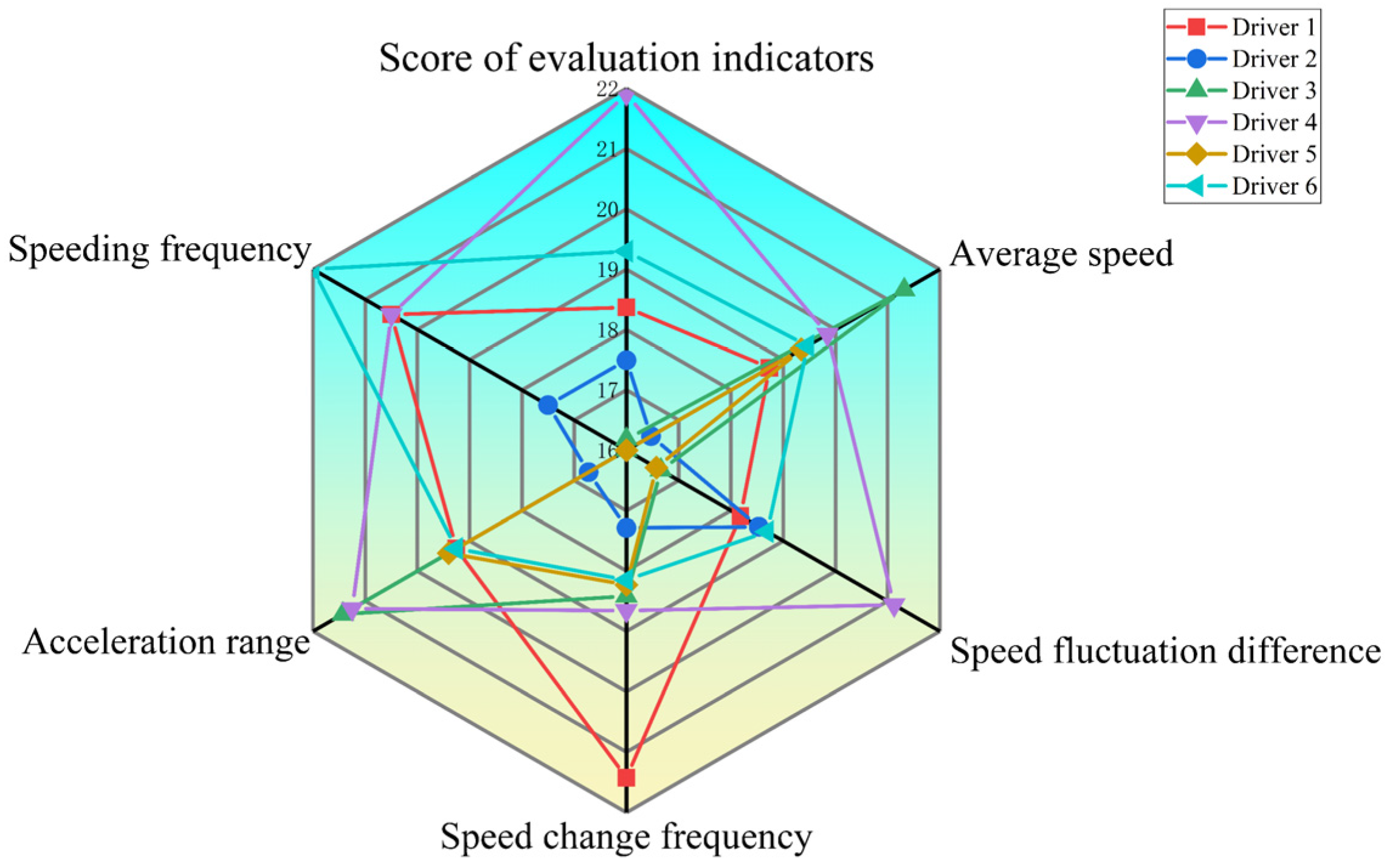
Further analysis of six representative drivers showed that middle-aged drivers changed speed more frequently but with lower fluctuation amplitude, indicating better control likely due to driving experience. Gender differences were also observed in accelerator pedal usage, validating the method’s ability to reflect behavioral traits. The proposed FP-growth-based safety evaluation method can be integrated into driver behavior monitoring systems to generate personalized reports. By translating behavioral data into intuitive safety scores, the method offers actionable feedback to help drivers recognize risks and improve their driving habits. This approach is particularly useful for fleet management companies, as it enables the evaluation of each driver’s safety performance based on aggregated trip-level indicators. By continuously monitoring the safety scores across multiple trips, managers can identify drivers with potentially unsafe behavior patterns and provide targeted feedback or training interventions. In this way, it contributes to reducing traffic risk and improving overall fleet safety management. Additionally, the method can support autonomous driving systems by improving behavior prediction and safety response strategies, thereby enhancing road safety performance. Furthermore, analyzing behavioral characteristics across driver groups (e.g., by age or gender) can assist traffic authorities in identifying high-risk populations, developing targeted safety policies, and optimizing traffic signal control and road design to improve urban traffic safety.
4.2. Limitations and Future Research
This study has two main limitations. First, due to experimental and urban road constraints, data on lateral driving behaviors (e.g., lane changes) were not collected. Future work will address this by integrating gyroscope sensors and high-definition cameras to capture lateral motion and lane information, enabling analysis of behaviors such as lane changes, overtaking, and turning. Data will also be collected under more diverse conditions, including off-peak hours, expressways, suburban roads, and adverse weather or nighttime environments. Second, the current method focuses on post-trip evaluation and does not support real-time feedback. Future research will explore identifying key safety-related parameters for real-time monitoring and feedback, aiming to proactively enhance driving safety. In addition, personalized feedback strategies will be developed by combining behavior association rules with individual driver characteristics.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}