
The Green Paradox of New Energy Vehicles: A System Dynamics Analysis



Abstract
1. Introduction
2. Materials and Methods
2.1. System Dynamics
2.2. Model Development
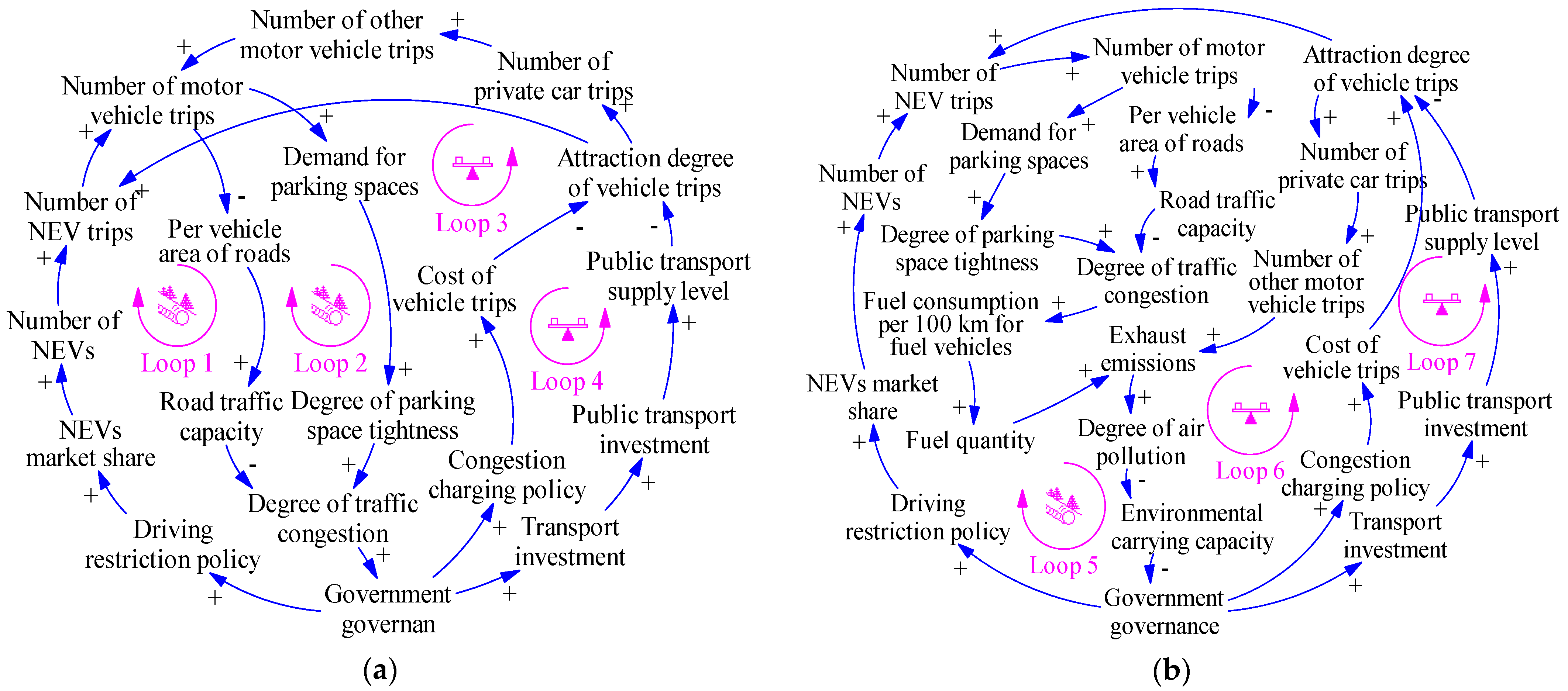
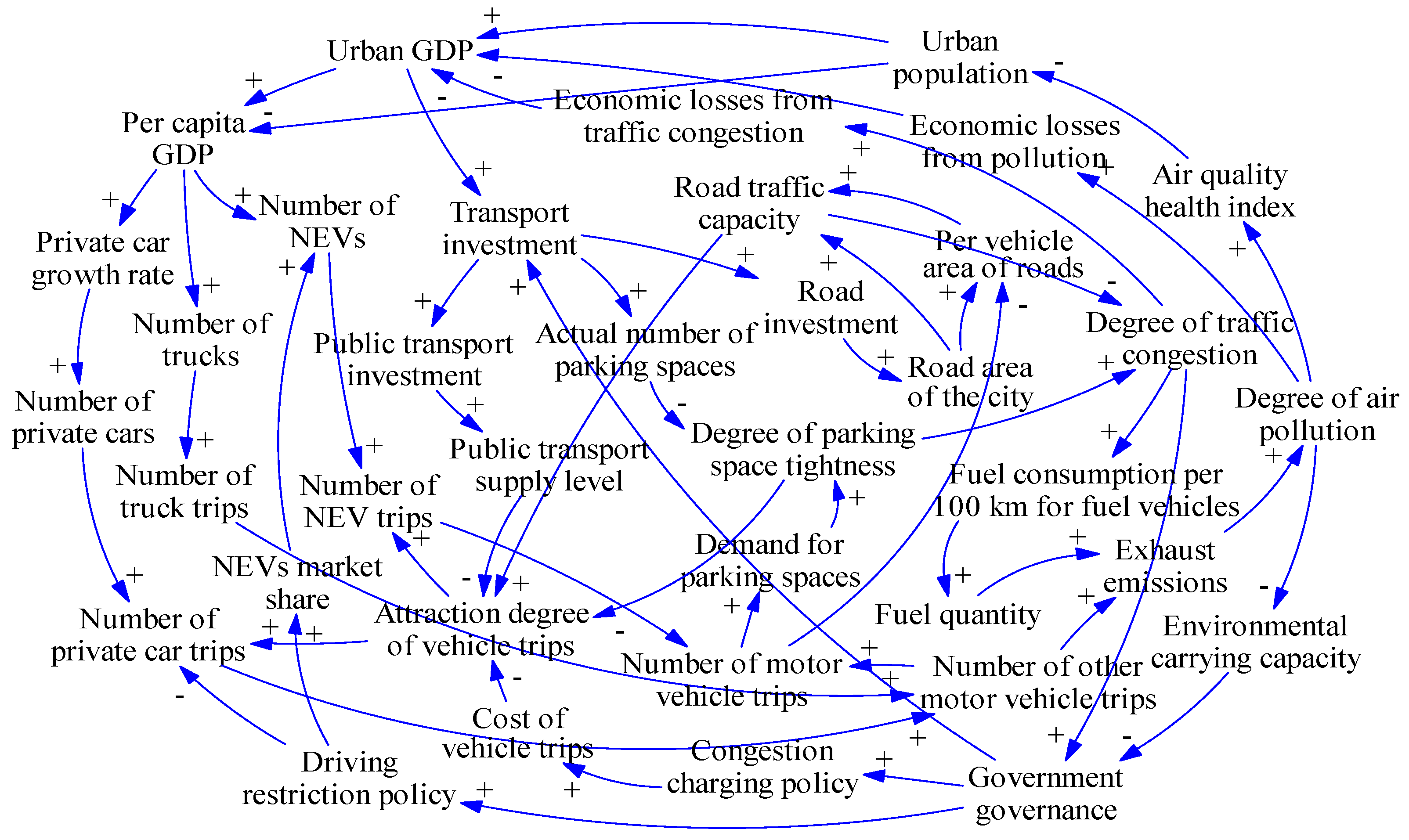
2.2.1. Causal Loop Analysis
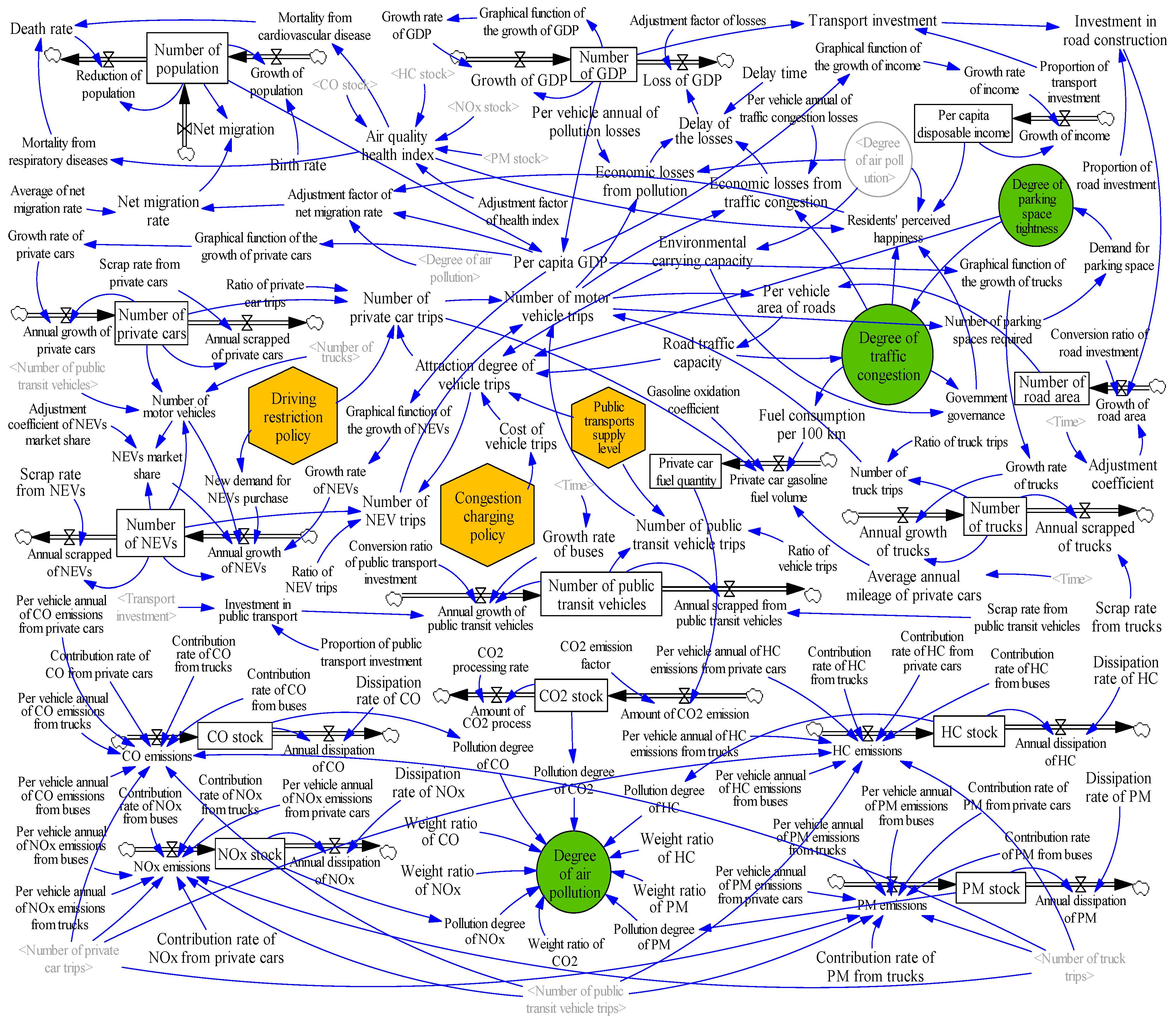
2.2.2. Stock and Flow Diagram
2.3. Data Sources
2.3.1. Determination of Main Parameters and Equations
2.3.2. Determination of Auxiliary Variables Based on SD-OEDGM
2.4. Model Test and Validation
2.4.1. Realistic Test
2.4.2. Model Validation
3. Results
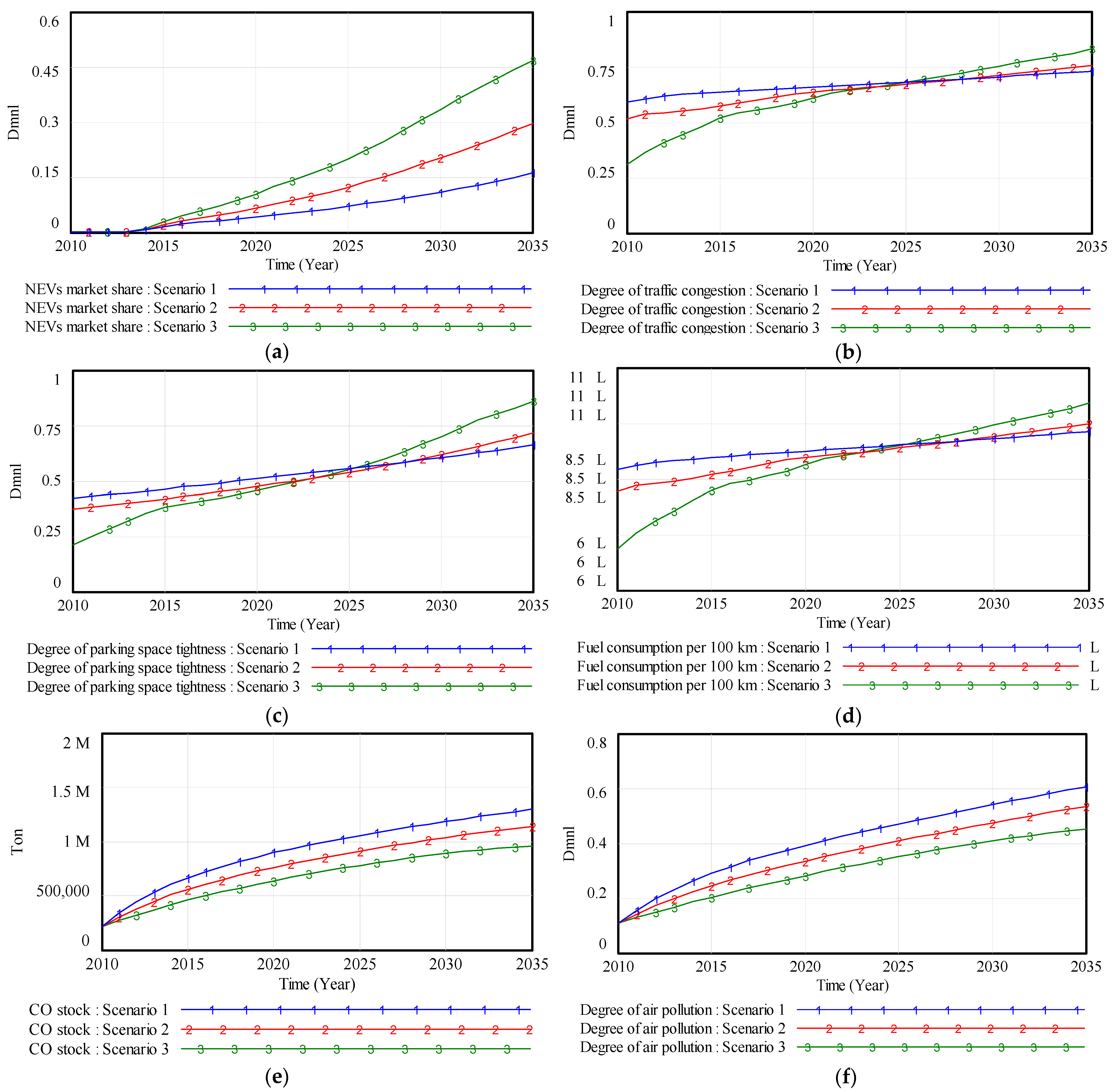
3.1. Green Paradox Effect of NEV Promotion Policy
3.2. Policy Optimization Analysis
3.2.1. Scenario Simulation
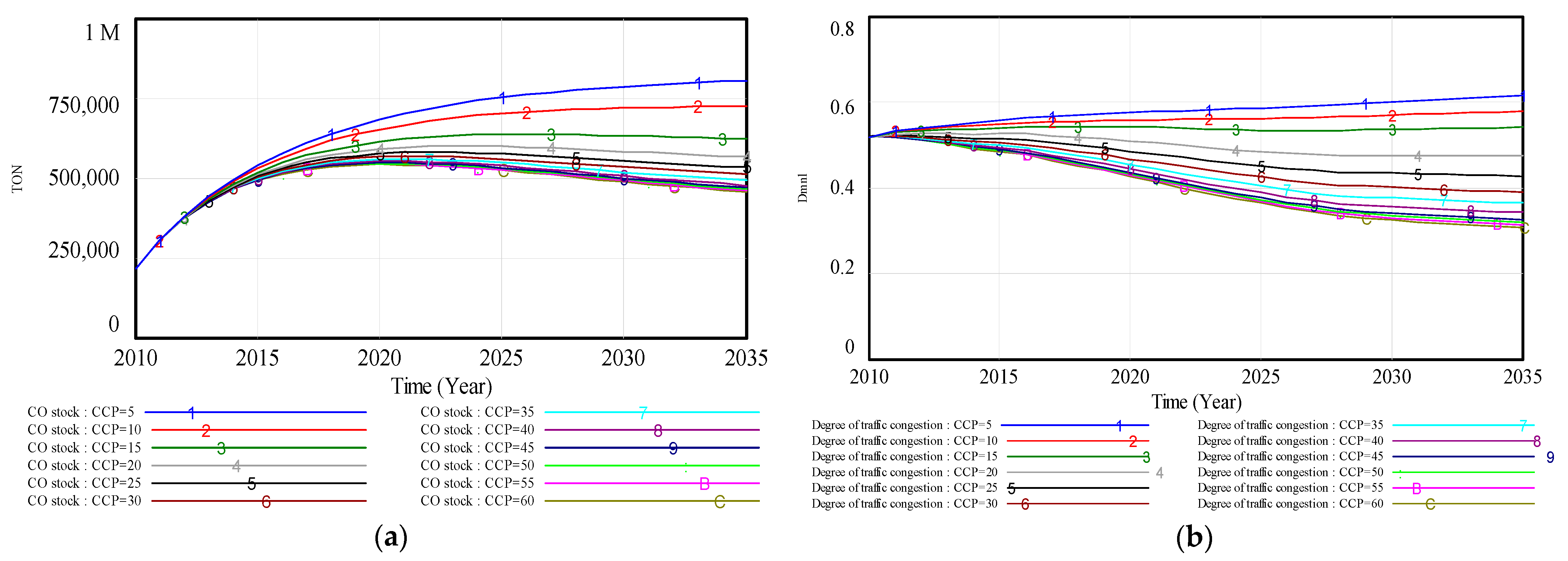
3.2.2. Sensitivity Analysis
4. Discussion
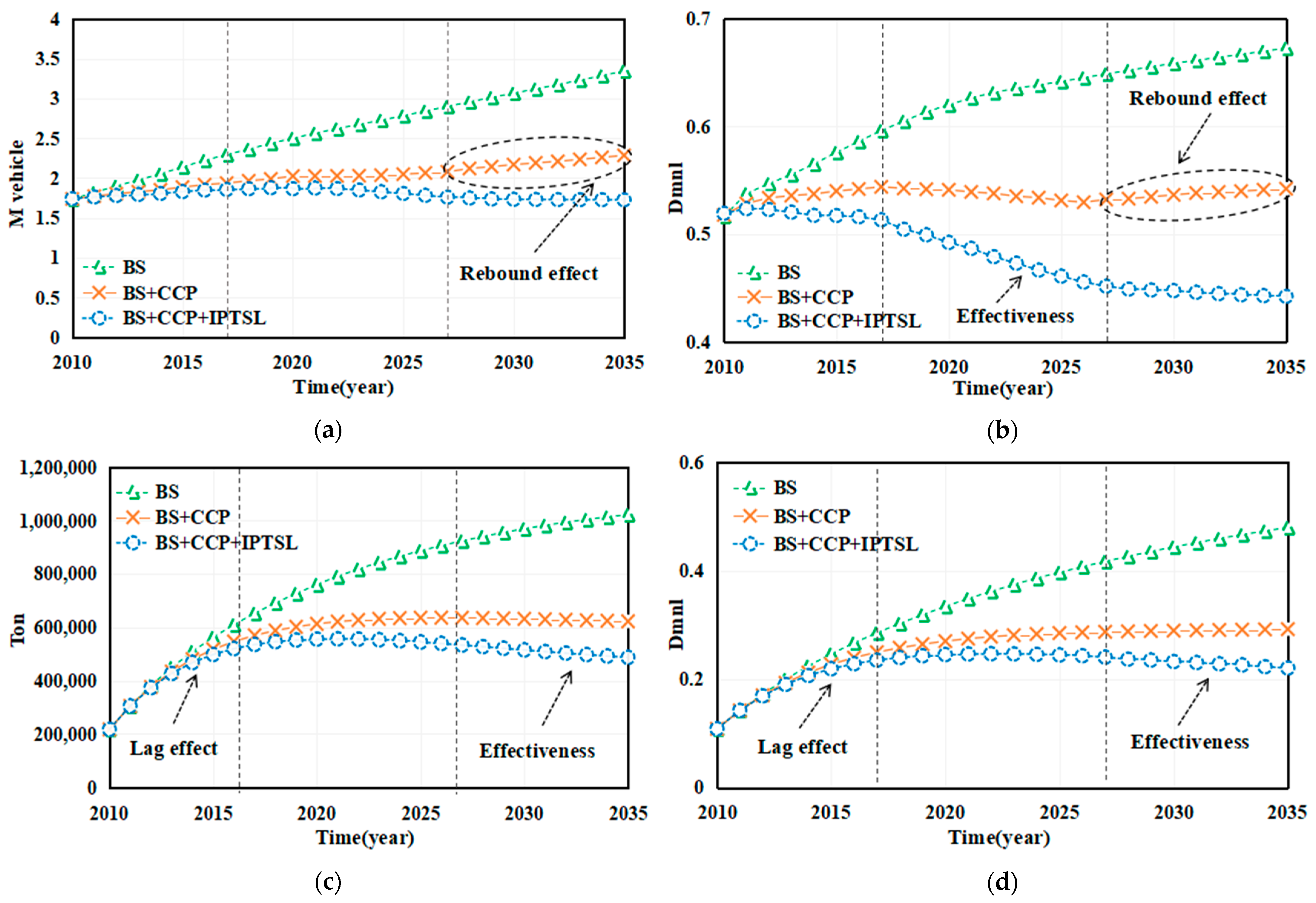
4.1. Rebound Effect and Lag Effect
4.2. Synergistic Benefits of Combination Scenario
- Social benefit
- Economic benefit
- Environmental benefit
- Health benefit
5. Conclusions
5.1. Main Conclusions
- The integrated algorithm of SD-OEDGM fully leverages the advantages of system dynamics and grey prediction theory, overcoming the limitations of partial validation. It effectively addresses the simulation and prediction of variables with nonlinear characteristics, more accurately describes model parameters and equations, and enhances the model’s precision and validity.
- Promoting NEVs effectively reduces vehicle exhaust emissions and alleviates traffic pollution but may lead to negative effects over time. As a non-economic incentive, driving restrictions on fuel-powered vehicles while exempting NEVs may, in the long run, stimulate new vehicle demand and accelerate the “substitution effect” of NEVs, resulting in a “green paradox” effect. For instance, DTC exhibits a “rebound effect” in later stages, further increasing parking demand and fuel consumption per 100 km for conventional fuel vehicles.
- To overcome the limitations of the policy, this study introduces a combined strategy of CCP and improved public transport supply level. CCP reduces the attraction degree of vehicle trips by increasing the cost of vehicle trips, but higher charges do not necessarily yield better outcomes. From the perspectives of congestion alleviation and pollution control, the reasonable range of CCP is 20–40 yuan/(day × vehicle).
- Compared with the baseline scenario, the combination scenario can not only achieve the “win-win” of congestion alleviation (~34.29%) and pollution control (~52.21%) but also effectively reduce the degree of parking space tightness (~29.45%), decrease economic losses (~80.11%), and improve residents’ health benefits (~57.21%), which have synergistic benefits in society, economy, environment, and health. Although this strategy has a “lag effect” in the early stage, it shows effectiveness in the medium term (congestion alleviation) and long term (pollution control).
5.2. Policy Recommendations
- Develop a comprehensive traffic control plan tailored to different stages of NEV development. While NEVs can reduce traffic pollution, they may increase congestion and parking demand. Therefore, both traffic and environmental impacts need to be comprehensively considered during the transition from fuel-powered vehicles to NEVs. In the initial stage of NEV promotion, some incentives such as high subsidies and unrestricted driving have been implemented. However, as the NEV market expands, policy support intensity should be reconsidered. For example, redirect purchase subsidy to battery R&D and introduce moderate NEV driving restrictions in congested areas. Implement diversified policies, such as CCP, to achieve collaborative governance of congestion mitigation and pollution control.
- Introduce appropriate CCP to increase vehicle travel costs and encourage green travel. At the same time, formulate a scientific and reasonable fee scheme to improve the public’s acceptance of the policy.
- Improve fuel quality through technological means to reduce fuel consumption per 100 km and emission coefficients of fuel-powered vehicles. Accelerate the phase-out of high-pollution, older vehicles and provide subsidies and tax incentives for low-emission vehicle manufacturers and owners.
- Increase investment in public transportation to improve supply and service quality. The realization of urban congestion mitigation and pollution control relies on the active participation of travelers. Government should strengthen the publicity of policy implementation purposes and traffic and pollution problems and enhance citizens’ environmental consciousness. Guide travelers to shift from passive acceptance to active choice of green travel, change the way the public travels, and then achieve synergistic effects in congestion alleviation and pollution control.
5.3. Limitations and Future Work
- This study takes Beijing as an example for simulation analysis, but the policy effects and research results may vary from region to region. In the future, we will conduct in-depth research considering the differences of policies and urban development in different urban contexts.
- This article does not separately explore pollution and energy consumption throughout the entire life cycle of NEVs, which is also an aspect that requires further exploration in this study.
- This study employs the OEDGM to predict certain auxiliary variables in the SD model, yet the following limitations remain: (1) Error accumulation in long-term forecasting: While the accumulated generating operation (AGO) mitigates randomness, prediction errors may amplify progressively during extended forecasting periods, causing deviations from actual trends; (2) Static parameter constraints: The conventional model’s fixed development coefficient and grey action quantity lack adaptability to dynamic data variations. Future enhancements could involve the following: For long-term prediction, integrating residual correction (e.g., Markov chain) or hybrid modeling (e.g., Grey-ARIMA) to suppress error propagation; For parameter adaptability, implementing rolling-window mechanisms or metaheuristic algorithms (e.g., particle swarm optimization) to dynamically adjust parameters, thereby improving the model’s capability to handle nonlinear data patterns.
- Future research could incorporate multi-objective optimization to quantify trade-offs between congestion mitigation, pollution control, and economic costs. The sensitivity analysis of CCP (Section 3.2.2) provides a basis for defining optimization boundaries, while the SD framework could be extended to integrate Pareto frontier analysis for policy combinations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
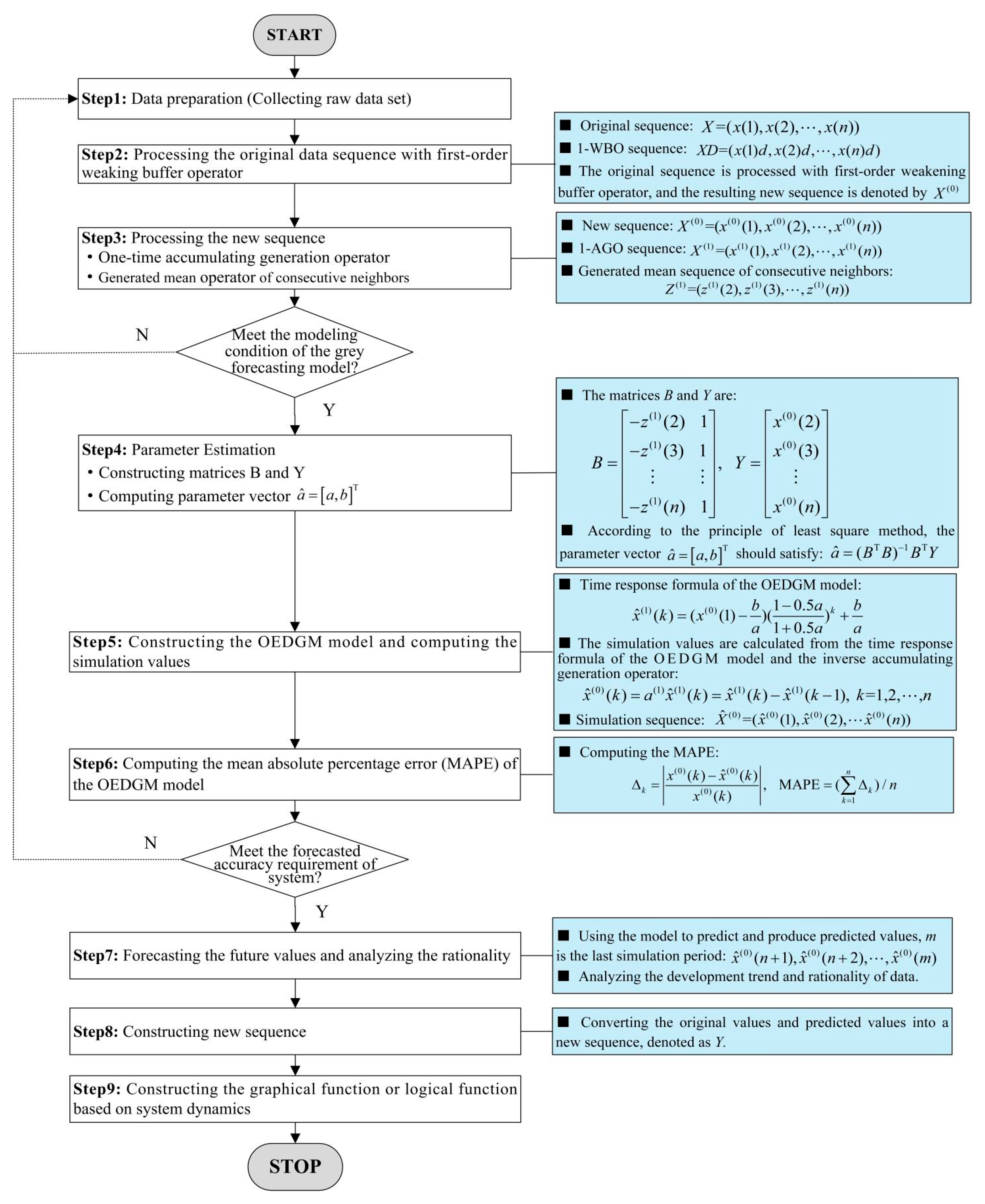
Appendix A. Integrated Algorithm Steps Based on the SD-OEDGM Approach
- Step1:
- Data preparation (Collecting raw data set).
- Step2:
- Processing the original data sequence with first-order weakening buffer operator.
- Step3:
- Processing the new data sequence.
- Step4:
- Parameter Estimation.
- Step5:
- Constructing the OEDGM model and computing the simulated values.
- Step6:
- Computing the MAPE of the OEDGM model.
- Step7:
- Forecasting the future values and analyzing the rationality.
- Step8:
- Constructing new sequence.
- Step9:
- Constructing the graphical function or logical function based on system dynamics.
References
- United States Environment Protection Agency (EPA): Transportation, Air Pollution, and Climate Change. 2024. Available online: https://www.epa.gov/transportation-air-pollution-and-climate-change (accessed on 20 December 2024).
- Cao, C. Integration of ten years of daily weather, traffic, and air pollution data from Norway’s six largest cities. Sci. Data 2024, 11, 744. [Google Scholar] [CrossRef] [PubMed]
- Dedoussi, I.C.; Eastham, S.D.; Monier, E.; Barrett, S.R. Premature mortality related to United States cross-state air pollution. Nature 2020, 578, 261–265. [Google Scholar] [CrossRef]
- Nansai, K.; Tohno, S.; Chatani, S.; Kanemoto, K.; Kagawa, S.; Kondo, Y. Consumption in the G20 nations causes particulate air pollution resulting in two million premature deaths annually. Nat. Commun. 2021, 12, 6286. [Google Scholar] [CrossRef] [PubMed]
- Ministry of Ecology and Environment (MEE) of the People’s Republic of China: China Mobile Source Environmental Management Annual Report (2011–2023). Available online: https://www.mee.gov.cn/ywgz/dqhjbh/ydyhjgl/202312/t20231207_1058461.shtml (accessed on 1 January 2024).
- Li, P.; Zhang, Z. The effects of new energy vehicle subsidies on air quality: Evidence from China. Energy Econ. 2023, 120, 106624. [Google Scholar] [CrossRef]
- Kejun, J.; Chenmin, H.; Songli, Z.; Pianpian, X.; Sha, C. Transport scenarios for China and the role of electric vehicles under global 2 °C/1.5 °C targets. Energy Econ. 2021, 103, 105172. [Google Scholar] [CrossRef]
- Tan, R.; Tang, D.; Lin, B. Policy impact of new energy vehicles promotion on air quality in Chinese cities. Energy Policy 2018, 118, 33–40. [Google Scholar] [CrossRef]
- Lin, B.; Wu, W. The impact of electric vehicle penetration: A recursive dynamic CGE analysis of China. Energy Econ. 2021, 94, 105086. [Google Scholar] [CrossRef]
- Aguilar, P.; Groß, B. Battery electric vehicles and fuel cell electric vehicles, an analysis of alternative powertrains as a mean to decarbonise the transport sector. Sustain. Energy Technol. Assess. 2022, 53, 102624. [Google Scholar]
- China Association of Automobile Manufacturers (CAAM): Brief Analysis of New Energy Vehicle Production and Sales in 2024. Available online: http://www.caam.org.cn/tjsj (accessed on 1 January 2025).
- Song, X.C.; Deng, C.N.; Shen, P.; Qian, Y.; Xie, M.H. Environmental impact and carbon footprint analysis of pure electric vehicles based on life cycle assessment. Res. Environ. Sci. 2023, 36, 2179–2188. (In Chinese) [Google Scholar]
- Schill, W.P.; Gerbaulet, C. Power system impacts of electric vehicles in Germany: Charging with coal or renewables? Appl. Energy 2015, 156, 185–196. [Google Scholar] [CrossRef]
- Yu, Q.; He, B.Y.; Ma, J.; Zhu, Y. California’s zero-emission vehicle adoption brings air quality benefits yet equity gaps persist. Nat. Commun. 2023, 14, 7798. [Google Scholar] [CrossRef]
- Muzir, N.A.Q.; Mojumder, M.R.H.; Hasanuzzaman, M.; Selvaraj, J. Challenges of electric vehicles and their prospects in Malaysia: A comprehensive review. Sustainability 2022, 14, 8320. [Google Scholar] [CrossRef]
- Ministry of Industry and Information Technology of the People’s Republic of China (MIIT): Announcement on the Continuation and Optimization of Tax Reduction Policies for New Energy Vehicles. 2023. Available online: https://www.gov.cn/zhengce/zhengceku/202306/content_6887734.htm (accessed on 20 June 2023).
- Yang, X.; Lin, W.; Gong, R.; Zhu, M.; Springer, C. Transport decarbonization in big cities: An integrated environmental co-benefit analysis of vehicles purchases quota-limit and new energy vehicles promotion policy in Beijing. Sust. Cities Soc. 2021, 71, 102976. [Google Scholar] [CrossRef]
- Ercan, T.; Onat, N.C.; Keya, N.; Tatari, O.; Eluru, N.; Kucukvar, M. Autonomous electric vehicles can reduce carbon emissions and air pollution in cities. Transport. Res. Part D-Transport. Environ. 2022, 112, 103472. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, L.; Chai, J. Influence of new energy vehicle subsidy policy on emission reduction of atmospheric pollutants: A case study of Beijing, China. J. Clean Prod. 2020, 275, 124069. [Google Scholar] [CrossRef]
- Li, J.; Jiang, M.; Li, G. Does the new energy vehicles subsidy policy decrease the carbon emissions of the urban transport industry? Evidence from Chinese cities in Yangtze River Delta. Energy 2024, 298, 131322. [Google Scholar] [CrossRef]
- Alimujiang, A.; Jiang, P. Synergy and co-benefits of reducing CO2 and air pollutant emissions by promoting electric vehicles—A case of Shanghai. Energy Sustain Dev. 2020, 55, 181–189. [Google Scholar] [CrossRef]
- Wu, D.; Xie, Y.; Lyu, X. The impacts of heterogeneous traffic regulation on air pollution: Evidence from China. Transport. Res. Part D-Transport. Environ. 2022, 109, 103388. [Google Scholar] [CrossRef]
- Jia, S.W.; Li, Y.; Fang, T.H. Can driving-restriction policies alleviate traffic congestion? A case study in Beijing, China. Clean Technol. Environ. Policy 2022, 24, 2931–2946. [Google Scholar]
- Wu, Y.; Yang, Z.; Lin, B.; Liu, H.; Wang, R.; Zhou, B.; Hao, J. Energy consumption and CO2 emission impacts of vehicle electrification in three developed regions of China. Energy Policy 2012, 48, 537–550. [Google Scholar] [CrossRef]
- Zivin, J.S.G.; Kotchen, M.J.; Mansur, E.T. Spatial and temporal heterogeneity of marginal emissions: Implications for electric cars and other electricity-shifting policies. J. Econ. Behav. Organ. 2014, 107, 248–268. [Google Scholar] [CrossRef]
- Holland, S.P.; Mansur, E.T.; Muller, N.Z.; Yates, A.J. Are there environmental benefits from driving electric vehicles? The importance of local factors. Am. Econ. Rev. 2016, 106, 3700–3729. [Google Scholar] [CrossRef]
- Chen, Y.S.; Lan, L.B.; Du, Y.Q.; Wang, T.; Xu, H.B.; Chen, H. Environmental benefit and carbon reduction economic evaluation of extended range/battery electric/internal combustion engine vehicles based on life cycle assessment. Acta Sci. Circumstantiae 2023, 43, 516–527. (In Chinese) [Google Scholar]
- Ma, S.C.; Fan, Y.; Feng, L. An evaluation of government incentives for new energy vehicles in China focusing on vehicle purchasing restrictions. Energy Policy 2017, 110, 609–618. [Google Scholar] [CrossRef]
- Ma, S.C.; Xu, J.H.; Fan, Y. Willingness to pay and preferences for alternative incentives to EV purchase subsidies: An empirical study in China. Energy Econ. 2019, 81, 197–215. [Google Scholar] [CrossRef]
- Wang, N.; Tang, L.; Zhang, W.; Guo, J. How to face the challenges caused by the abolishment of subsidies for electric vehicles in China? Energy 2019, 166, 359–372. [Google Scholar] [CrossRef]
- Kong, D.; Xia, Q.; Xue, Y.; Zhao, X. Effects of multi policies on electric vehicle diffusion under subsidy policy abolishment in China: A multi-actor perspective. Appl. Energy 2020, 266, 114887. [Google Scholar] [CrossRef]
- Wang, T.; Tang, T.Q.; Huang, H.J.; Qu, X. The adverse impact of electric vehicles on traffic congestion in the morning commute. Transp. Res. Part C-Emerg. Technol. 2021, 125, 103073. [Google Scholar] [CrossRef]
- Ju, X.; Sun, B.; Jin, J. The Effect of New Energy Vehicle Policies on Traffic Congestion: Evidence from Beijing. Bus. Manag. Res. 2018, 7, 9–21. [Google Scholar] [CrossRef]
- Jia, S.W.; Yan, G.L. Research on the traffic congestion charging fee model in urban areas based on SD-GM approach. Oper. Res. Manag. Sci. 2019, 28, 160–168. (In Chinese) [Google Scholar]
- Koh, W.P.; Chin, K.K. The applicability of prospect theory in examining drivers’ trip decisions, in response to Electronic Road Pricing (ERP) rates adjustments-a study using travel data in Singapore. Transp. Res. Part A-Policy Pract. 2022, 155, 115–127. [Google Scholar] [CrossRef]
- Chen, Z.; Li, B.; Jia, S. Dynamic evaluation of environmental-economic performance of vehicle emission reduction policy from the perspective of the loss-aversion effect. Sust. Cities Soc. 2022, 85, 104080. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Meléndez-Useros, M.; Jiménez-Salas, M.; López Boada, M.J. Fault-Tolerant Robust Output-Feedback Control of a Vehicle Platoon Considering Measurement Noise and Road Disturbances. IET Intell. Transp. Syst. 2025, 19, e70007. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Gutiérrez-Moizant, R.; Meléndez-Useros, M.; López Boada, M.J. Static Output Feedback Control for Vehicle Platoons with Robustness to Mass Uncertainty. Electronics 2025, 14, 139. [Google Scholar] [CrossRef]
- Xiao, G.; Li, Z.; Sun, N.; Zhang, Y. Research on the Stability Control Strategy of High-Speed Steering Intelligent Vehicle Platooning. World Electr. Veh. J. 2024, 15, 169. [Google Scholar] [CrossRef]
- Liu, S.F. Grey System Theory and Application; Science Press: Beijing, China, 2017. (In Chinese) [Google Scholar]
- Wan, L.L.; Shan, Z.P.; Jiang, X.Y.; Wang, Z.; Lv, Y.Y.; Xu, S.M.; Huang, J.H. Life Cycle Prediction of Airport Operation Based on System Dynamics. Sustainability 2024, 16, 9596. [Google Scholar] [CrossRef]
- Armenia, S.; Barnabé, F.; Franco, E.; Iandolo, F.; Pompei, A.; Tsaples, G. Identifying policy options and responses to water management issues through System Dynamics and fsQCA. Technol. Forecast. Soc. Change 2023, 194, 122737. [Google Scholar] [CrossRef]
- Gao, X.J.; Zhu, A.S.; Yu, Q.F. Exploring the Carbon Abatement Strategies in Shipping Using System Dynamics Approach. Sustainability 2023, 15, 13907. [Google Scholar] [CrossRef]
- Aftabi, N.; Moradi, N.; Mahroo, F.; Kianfar, F. Sd-abm-ism: An integrated system dynamics and agent-based modeling framework for information security management in complex information systems with multi-actor threat dynamics. Expert Syst. Appl. 2025, 263, 125681. [Google Scholar] [CrossRef]
- Wang, W.B.; Liu, Y.; Zhong, L.S.; Qi, J.Y.; Tong, P. Research on recovery decision of waste power battery under subsidy-penalty policy. Chin. J. Manag. Sci. 2023, 31, 90–102. (In Chinese) [Google Scholar]
- Yao, X.; Ma, S.; Bai, Y.; Jia, N. When are new energy vehicle incentives effective? Empirical evidence from 88 pilot cities in China. Transp. Res. Part A Policy Pract. 2022, 165, 207–224. [Google Scholar] [CrossRef]
- Zhang, H.R.; Liu, Y.; Tan, X.J.; Qi, Y.; Yang, L.Y.; Jia, M.Q. Research on the impact of leap-forward development of new energy vehicles on urban traffic congestion. Chin. J. Manag. Sci. 2024, 1–19. (In Chinese) [Google Scholar]
- Jia, S.; Bi, L.; Zhu, W.; Fang, T. System dynamics modeling for improving the policy effect of traffic energy consumption and CO2 emissions. Sust. Cities Soc. 2023, 90, 104398. [Google Scholar] [CrossRef]
- Zhang, W.H.; Ye, M.R.; Xi, C.; Song, Z.W. Vehicle formation and carbon emission characteristics in mixed traffic flow environment. J. Jilin Univ. (Eng. Technol. Ed.) 2025, 2025, 1–12. (In Chinese). Available online: https://link.cnki.net/doi/10.13229/j.cnki.jdxbgxb.20240775 (accessed on 10 March 2025).
- Andor, M.A.; Gerster, A.; Gillingham, K.T.; Horvath, M. Running a car costs much more than people think—Stalling the uptake of green travel. Nature 2020, 580, 453–455. [Google Scholar] [CrossRef]
- Yang, H.X.; Li, J.D.; Zhang, H.; Liu, S.Q. Research on the governance of urban traffic jam based on system dynamics. Syst. Eng-Theor Pract. 2014, 34, 2135–2143. (In Chinese) [Google Scholar]
- Jia, S.W. Double Dividend Effect of Vehicle Pollutant Reduction Control Strategy. Manag. Rev. 2022, 34, 53–61+182. (In Chinese) [Google Scholar]
- Chen, Z.; Ye, X.Y.; Li, B.; Jia, S.W. Effect of Driving-Restriction Policies Based on System Dynamics, the Back Propagation Neural Network, and Gray System Theory. Arab. J. Sci. Eng. 2023, 48, 7109–7125. [Google Scholar] [CrossRef]
- Yuan, G.D. Research on the evolution characteristics of internet public opinion crisis and its early warning scheme. J. Mod. Inf. 2021, 41, 154–159. (In Chinese) [Google Scholar]
- Beijing Municipal Government: Notice on Implementing Traffic Restriction Measures During Peak Hours on Workdays. 2025. Available online: https://www.beijing.gov.cn/zhengce/zhengcefagui/202503/t20250324_4041745.html (accessed on 10 March 2025).
- Beijing Traffic Management Bureau: Announcement on Temporary Traffic Control Measures for Heavy Air Pollution. 2023. Available online: https://jtgl.beijing.gov.cn/jgj/jgxx/gsgg/jttg/588465/436264792/index.html (accessed on 1 January 2024).
- Chen, Z.; Zan, Z.; Jia, S. Effect of urban traffic-restriction policy on improving air quality based on system dynamics and a non-homogeneous discrete grey model. Clean Technol. Environ. Policy 2022, 24, 2365–2384. [Google Scholar] [CrossRef]
- Drliciak, M.; Cingel, M.; Celko, J.; Panikova, Z. Research on Vehicle Congestion Group Identification for Evaluation of Traffic Flow Parameters. Sustainability 2024, 16, 1861. [Google Scholar] [CrossRef]
- Cui, S.H.; Yu, B. Impact of CAV Performance Degradation and Cooperative Prompting onthe Stability and Fundamental Diagram of Mixed Traffic Flow. China J. Highw. Transp. 2025, 1–14. (In Chinese). Available online: http://kns.cnki.net/kcms/detail/61.1313.U.20250312.1721.002.html (accessed on 13 March 2025).
- Mądziel, M. Vehicle emission models and traffic simulators: A review. Energies 2023, 16, 3941. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, K.H.; Jia, S.W. “Green paradox” effect of new-energy vehicles based on system dynamics. Oper. Res. Manag. Sci. 2021, 30, 232–239. (In Chinese) [Google Scholar]
- Xu, Y.; Tian, S.; Wang, Q.; Zhang, Y.; Yuan, X.; Ma, Q.; Ma, H.; Liu, C. Optimization path design for urban travel system based on CO2-congestion-satisfaction multi-objective synergy: Case study in Suzhou, China. Sust. Cities Soc. 2022, 81, 103863. [Google Scholar] [CrossRef]
- Jia, S.; Yan, G.; Shen, A.; Zheng, J. A system dynamics model for determining the traffic congestion charges and subsidies. Arab. J. Sci. Eng. 2017, 42, 5291–5304. [Google Scholar] [CrossRef]
- Zhang, L.Y.; Weng, D.W.; Wen, X.J.; Zhang, H.F.; Hu, X.S.; Zeng, Z.Q. Path of Transportation Energy Saving and Carbon Reduction under the Background of Green Development Transformation. Environ. Sci. 2025, 1–14. (In Chinese). Available online: https://link.cnki.net/doi/10.13227/j.hjkx.202412093 (accessed on 10 March 2025).
- De Wolf, D.; Smeers, Y. Comparison of Battery Electric Vehicles and Fuel Cell Vehicles. World Electr. Veh. J. 2023, 14, 262. [Google Scholar] [CrossRef]
- Li, Y.; Taghizadeh-Hesary, F. The economic feasibility of green hydrogen and fuel cell electric vehicles for road transport in China. Energy Policy 2022, 160, 112703. [Google Scholar] [CrossRef]
- Singh, J.P.; Kumar, S.; Mohapatra, S.K. Chemical treatment of low-grade coal using Taguchi approach. Part. Sci. Technol. 2020, 38, 73–80. [Google Scholar] [CrossRef]
- Wang, L.; Xu, J.; Qin, P. Will a driving restriction policy reduce car trips?—The case study of Beijing, China. Transp. Res. Part A-Policy Pract. 2014, 67, 279–290. [Google Scholar] [CrossRef]
- Yang, W.; Yu, C.; Yuan, W.; Wu, X.; Zhang, W.; Wang, X. High-resolution vehicle emission inventory and emission control policy scenario analysis, a case in the Beijing-Tianjin-Hebei (BTH) region, China. J. Clean Prod. 2018, 203, 530–539. [Google Scholar] [CrossRef]
- Chen, R.J.; Chen, B.H.; Kan, H.D. Air quality health index in China: A pilot study. China Environ. Sci. 2013, 33, 2081–2086. (In Chinese) [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Unit | Data sources |
|---|---|---|---|
| Urban GDP | 1.4964 × 1012 | yuan | Beijing Statistical Yearbooks (2011–2024) |
| Number of population | 1.9619 × 107 | person | |
| Number of private cars | 3.7151 × 106 | vehicle | |
| Number of road area | 9.3950 × 107 | m2 | |
| Birth rate | 0.0080 | 1/year | |
| Death rate | 0.0049 | 1/year | |
| Average of net migration rate | 0.0046 | 1/year | |
| CO stock | 216,923.5100 | ton | Calculated by MEE [5] |
| HC stock | 29,695.7500 | ton | |
| NOx stock | 39,621.1500 | ton | |
| PM stock | 2932.6800 | ton | |
| Contribution rate of CO from private cars | 0.5753 | — | Calculated by MEE [5] and Jia and Yan [34] |
| Per vehicle annual of PM emissions from trucks | 0.0152 | ton/(vehicle × year) | |
| Scrap rate | 0.0670 | — | Yang et al. [51] |
| Dissipation rate | 0.2000 | — | |
| Ratio of vehicle trips | 0.5500 | — | Jia and Yan [34] |
| CO2 emission coefficient | 2.9251 | Kg/L | Provincial Greenhouse Gas Inventory Compilation Guide (Trial) |
| Equations | Number | |
|---|---|---|
| Rate variables | ||
| Growth of population (t) (person/year) = | Number of population (t) (person) × Birth rate (1/year) | (1) |
| Growth of GDP (t) (yuan/year) = | Urban GDP (t) (yuan) × Growth rate of GDP (1/year). | (2) |
| Annual dissipation of CO (t) (ton/year) = | CO stock (t) (ton) × Dissipation rate of CO (1/year) | (3) |
| Loss of GDP (t) (yuan/year) = | Delay of the losses (t) (yuan) × Adjustment factor of losses (1/year) | (4) |
| Annual growth of private cars (t) (vehicle/year) = | Number of private cars (t) (vehicle) × Growth rate of private cars (1/year) | (5) |
| Private car gasoline fuel volume(t) (L/year) = | Gasoline oxidation coefficient × Fuel consumption per 100 km (L/100km) × Number of private car trips (t) (vehicle) × Average annual mileage of private cars (t) (km/(vehicle × year)) ÷ 100. | (6) |
| Delay of the losses (t) (yuan) = | SMOOTH (Economic losses from traffic congestion (t) (yuan) + Economic losses from pollution (t) (yuan), Delay time) | (7) |
| CO emissions (t) (ton/year) = | CO emissions from private cars + CO emissions from trucks + CO emissions from buses | (8) |
| CO emissions from private cars (t) (ton/year) = | Number of private car trips (t) (vehicle) × Contribution rate of CO from private cars × Per vehicle annual of CO emissions from private cars (ton/(vehicle × year)) | (9) |
| CO emissions from trucks (t) (ton/year) = | Number of truck trips (t) (vehicle) × Contribution rate of CO from trucks × Per vehicle annual of CO emissions from trucks (ton/(vehicle × year)) | (10) |
| CO emissions from buses (t) (ton/year) = | Number of bus trips (t) (vehicle) × Contribution rate of CO from buses × Per vehicle annual of CO emissions from buses (ton/(vehicle × year)) | (11) |
| Auxiliary variables | ||
| Attraction degree of vehicle trips = | 0.15 × (1+Road traffic capacity) + 0.3/LN (Cost of vehicle trips) + 0.2 × (1 − Public transports supply level) + 0.15 × (1 − Degree of parking space tightness) + 0.2 × (1+Environmental carrying capacity) | (12) |
| Degree of traffic congestion = | (1 − Road traffic capacity) × 0.7+Degree of parking space tightness × 0.3 | (13) |
| Accuracy Grade | Grade 1 | Grade 2 | Grade 3 | Grade 4 |
|---|---|---|---|---|
| Mean square error ratio | 0.3500 | 0.5000 | 0.6500 | 0.8000 |
| Small error probability | 0.9500 | 0.8000 | 0.7000 | 0.6000 |
| Variables | Scenario1 | Scenario2 | Variation | Scenario3 | Variation |
|---|---|---|---|---|---|
| NEV market share (Dmnl) | 0.1611 | 0.2971 | 84.46% | 0.4686 | 190.94% |
| Degree of traffic congestion (Dmnl) | 0.7295 | 0.7573 | 3.81% | 0.8324 | 14.11% |
| Degree of parking space tightness (Dmnl) | 0.6613 | 0.7183 | 8.63% | 0.8573 | 29.64% |
| Fuel consumption per 100 km (L) | 9.5593 | 9.7331 | 1.82% | 10.2027 | 6.73% |
| CO stock (Ton) | 1,296,450 | 1,138,820 | −12.16% | 959,307 | −26.01% |
| Degree of air pollution (Dmnl) | 0.6066 | 0.5342 | −11.94% | 0.4522 | −25.46% |
| Scenarios | Detailed Description |
|---|---|
| BS | Baseline Scenario (BS) mainly refers to the double-tail number restriction policy currently implemented in Beijing. |
| BS + CCP | Based on the baseline scenario, CCP is introduced to increase the cost of vehicle trips and reduce the total amount of vehicle travel. According to the existing literature [34], the charge is tentatively set at 15 yuan/(day × vehicle). |
| BS + CCP + IPTSL | The combination scenario builds on the promotion of NEVs and the introduction of the CCP, aiming to enhance the public transport supply level and guide the public to shift their travel modes towards green travel (with an effect of 20% [36]). |
| Variables | BS | BS + CCP | Variation | BS + CCP + IPTSL | Variation |
|---|---|---|---|---|---|
| Number of motor vehicle trips (Million vehicle) | 3.3456 × 106 | 2.2856 × 106 | −31.68% | 1.8192 × 106 | −45.62% |
| Degree of traffic congestion (Dmnl) | 0.6726 | 0.5408 | −19.61% | 0.4420 | −34.29% |
| CO stock (Ton) | 1.0219 × 106 | 6.2238 × 105 | −39.10% | 4.7217 × 105 | −53.79% |
| Degree of air pollution (Dmnl) | 0.4797 | 0.2925 | −39.02% | 0.2224 | −53.64% |
| CCP | CO Stock (Ton) | Variation | Degree of Traffic Congestion (Dmnl) | Variation |
|---|---|---|---|---|
| 5 | 804,408 | — | 0.6156 | — |
| 10 | 723,608 | −10.04% | 0.5780 | −6.11% |
| 15 | 622,380 | −13.99% | 0.5408 | −6.44% |
| 20 | 565,134 | −9.20% | 0.4747 | −12.22% |
| 25 | 532,400 | −5.79% | 0.4273 | −9.98% |
| 30 | 509,270 | −4.34% | 0.3894 | −8.86% |
| 35 | 490,895 | −3.61% | 0.3631 | −6.76% |
| 40 | 476,820 | −2.87% | 0.3417 | −5.89% |
| 45 | 472,128 | −0.98% | 0.3241 | −5.15% |
| 50 | 468,965 | −0.67% | 0.3165 | −2.34% |
| 55 | 466,864 | −0.45% | 0.3108 | −1.81% |
| 60 | 465,076 | −0.38% | 0.3064 | −1.40% |
| Variables | BS | BS + CCP + IPTSL | Variation |
|---|---|---|---|
| Degree of traffic congestion (Dmnl) | 0.6726 | 0.4420 | −34.29% |
| Degree of parking space tightness (Dmnl) | 0.5608 | 0.3956 | −29.45% |
| Road traffic capacity (Dmnl) | 0.2794 | 0.5382 | 92.61% |
| Loss of GDP (yuan/year) | 6.3906 × 109 | 1.2710 × 109 | −80.11% |
| Economic losses from pollution (yuan) | 8.9505 × 109 | 1.8849 × 109 | −78.94% |
| Economic losses from traffic congestion (yuan) | 4.1956 × 109 | 6.4905 × 108 | −84.53% |
| Degree of air pollution (Dmnl) | 0.4797 | 0.2224 | −53.64% |
| Environmental carrying capacity (Dmnl) | 0.5203 | 0.7708 | 48.14% |
| Air quality health index (Dmnl) | 7.0064 | 2.9979 | −57.21% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, G.; Zan, Z. The Green Paradox of New Energy Vehicles: A System Dynamics Analysis. Sustainability 2025, 17, 3938. https://doi.org/10.3390/su17093938
Tu G, Zan Z. The Green Paradox of New Energy Vehicles: A System Dynamics Analysis. Sustainability. 2025; 17(9):3938. https://doi.org/10.3390/su17093938
Chicago/Turabian StyleTu, Guoping, and Zhe Zan. 2025. "The Green Paradox of New Energy Vehicles: A System Dynamics Analysis" Sustainability 17, no. 9: 3938. https://doi.org/10.3390/su17093938
APA StyleTu, G., & Zan, Z. (2025). The Green Paradox of New Energy Vehicles: A System Dynamics Analysis. Sustainability, 17(9), 3938. https://doi.org/10.3390/su17093938