

Simulating Oil Spill Evolution and Environmental Impact with Specialized Software: A Case Study for the Black Sea




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. GNOME for Oil Spill Trajectory Modelling
1.2. ADIOS2 for Oil Weathering and Fate Simulation
2. Method
2.1. Research Objectives
- -
- GNOME v.47.2 (General NOAA Operational Modelling Environment)—used to study the evolution of oil spills over time;
- -
- ADIOS2 v.2.10.2 (Automated Data Inquiry for Oil Spills)- used to assess intervention methods.
2.2. GNOME: Oil Spill Trajectory Modelling
- -
- trajectory prediction—estimates the movement of oil spills under wind, ocean current, and meteorological conditions;
- -
- uncertainty analysis—assesses how trajectory predictions are affected by data inaccuracies in wind speed, currents, and pollutant properties;
- -
- hydrocarbon fate analysis—simulates the dispersion and evaporation of oil spills over time.
- -
- integration with ADIOS2—when used alongside ADIOS2 v.2.10.2, GNOME v.47.2 can track chemical and physical transformations of spilled oil, helping design intervention strategies.
- Standard Mode—uses predefined hydrodynamic and geographical data to simulate oil spill movement;
- GIS Mode—integrates with geographic information systems (GIS) for enhanced spatial visualization and mapping;
- Diagnostic Mode—allows real-time predictions and response planning, making it the most flexible option for emergency interventions.
- Streamline Advection Model (SAC)—defines streamlines and their amplitudes, simulating how oil spreads within ocean currents;
- Wind-Driven Currents Model (WAC)—allows customization of wind amplitude and surface stress factors, modelling wind-induced drift at the ocean surface;
- Tidal Current Model (TAC)—simulates oil transport due to tidal forces. (Currently not applicable in all marine areas, being depended on the tidal influence);
- Diagnostic Circulation Model (DAC)—simulates current movements based on ocean surface height variations and dynamic flow conditions.
2.2.1. Equations for Streamline Advection Modelling (SAC) [19]
- -
- all, without the flow limits, are current lines;
- -
- the difference between the values of the current lines in the channels give the transport;
- -
- natural flow limits do not prevent the flow;
- -
- the amplitude of the flow change is used to relax the non-divergent constraints and simulate a constant current wave.
2.2.2. Diagnostic Circulation Model (DAC) [21]
- -
- the specified surface elevation along the isobar must have at least one open boundary within the model domain;
- -
- the correct boundary for surface elevation is to the right when facing shallow water if located in the Northern hemisphere;
- -
- shoreline boundaries can be ‘non-flowing’, elevated, or slightly inclined, depending on the simulated coastal current;
- -
- the natural boundary does not obstruct the flow.
2.2.3. Wind-Driven Current Modelling (WAC) [23]
- -
- the wind speed can be specified across the entire domain, with at least one uplift point defined;
- -
- the uplift surface must be specified as high as the boundary points on one side and as low as the other;
- -
- the natural boundary does not obstruct the natural flow.
2.3. ADIOS2: Software for Oil Spill Response and Management
- -
- viscosity evolution analysis—the software estimates changes in oil viscosity over time, helping answer critical questions regarding the effectively dispersion;
- -
- water content estimation in oil slicks—ADIOS2 predicts the rate at which oil absorbs water, assisting in planning the recovery process;
- -
- simulation of common oil spill cleanup techniques—ADIOS2 provides estimations on the effectiveness of standard response strategies, including: chemical dispersion (application of surfactants to break oil into small droplets), skimming (mechanical recovery of oil using skimmers), in-situ burning (controlled combustion of spilled oil), environmental weathering processes (including evaporation, sedimentation, and emulsification).
2.4. The Methodology Applied for Real-Time Oil Spill Simulations
- ✓
- access NOAA’s GNOME on website link: http://gnome.orr.noaa.gov/goods, accessed on 30 November 2024;
- ✓
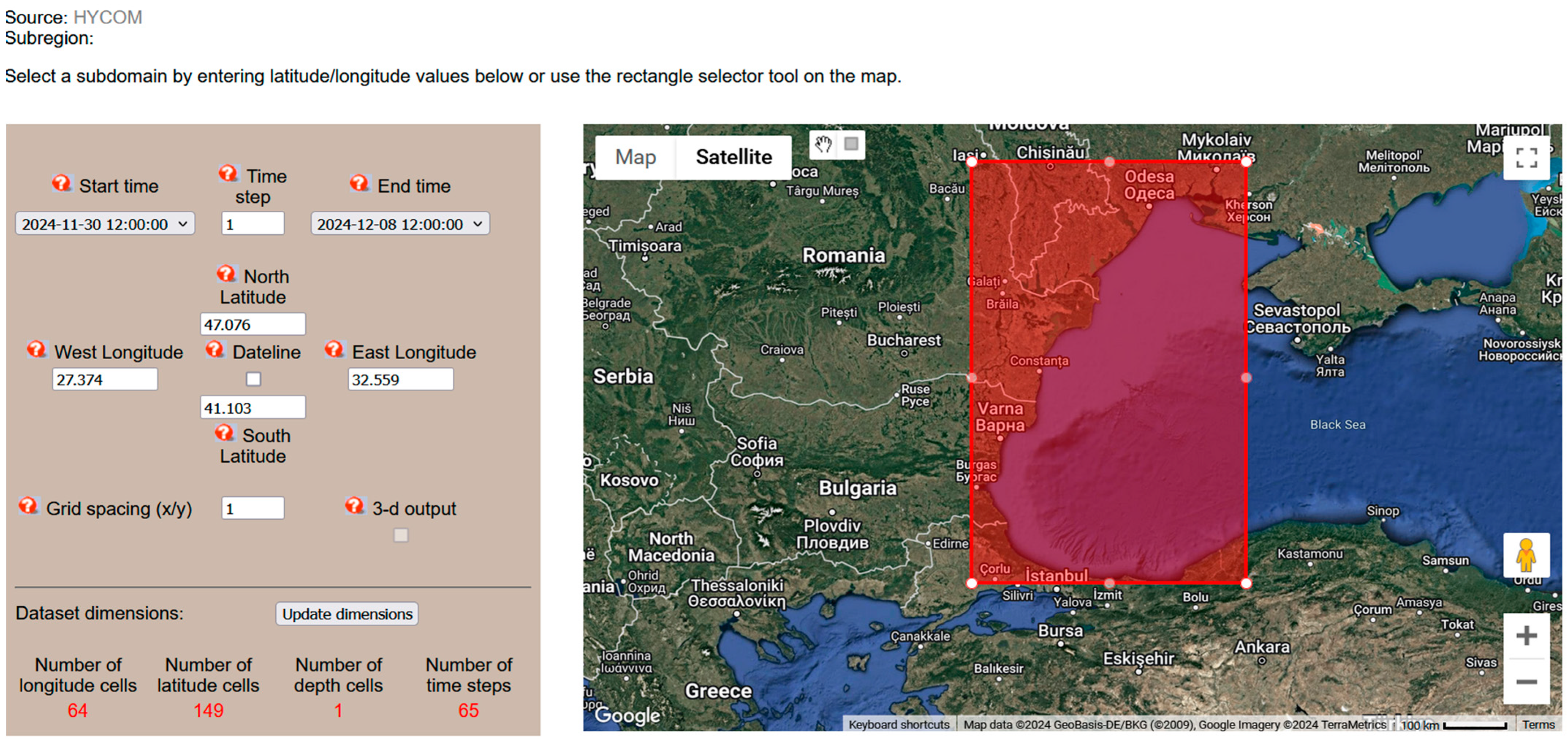
- select “Global Custom Map Generator” to define a region of interest considered in the study;
- ✓
- click “Draw Rectangle” to specify the geographic area (as shown in Figure 2);
- ✓
- click “Get Map”, and save the generated coast.bna file, which will later be used in GNOME for map insertion;
- ✓
- load the coast.bna file into GNOME v.47.2 software;
- ✓
- navigate to ‘Maps > Load’, then import the file to generate a customized simulation map;
- ✓
- retrieve real-time wind and ocean current data;
- ✓
- download separate datasets for wind and current conditions from NOAA (http://gnome.orr.noaa.gov/goods, accessed on 30 November 2024);
- ✓
- in case of marine/ocean currents, refer to Figure 3;
- ✓
- load these datasets into GNOME v.47.2 under the “Movers” category;
- ✓
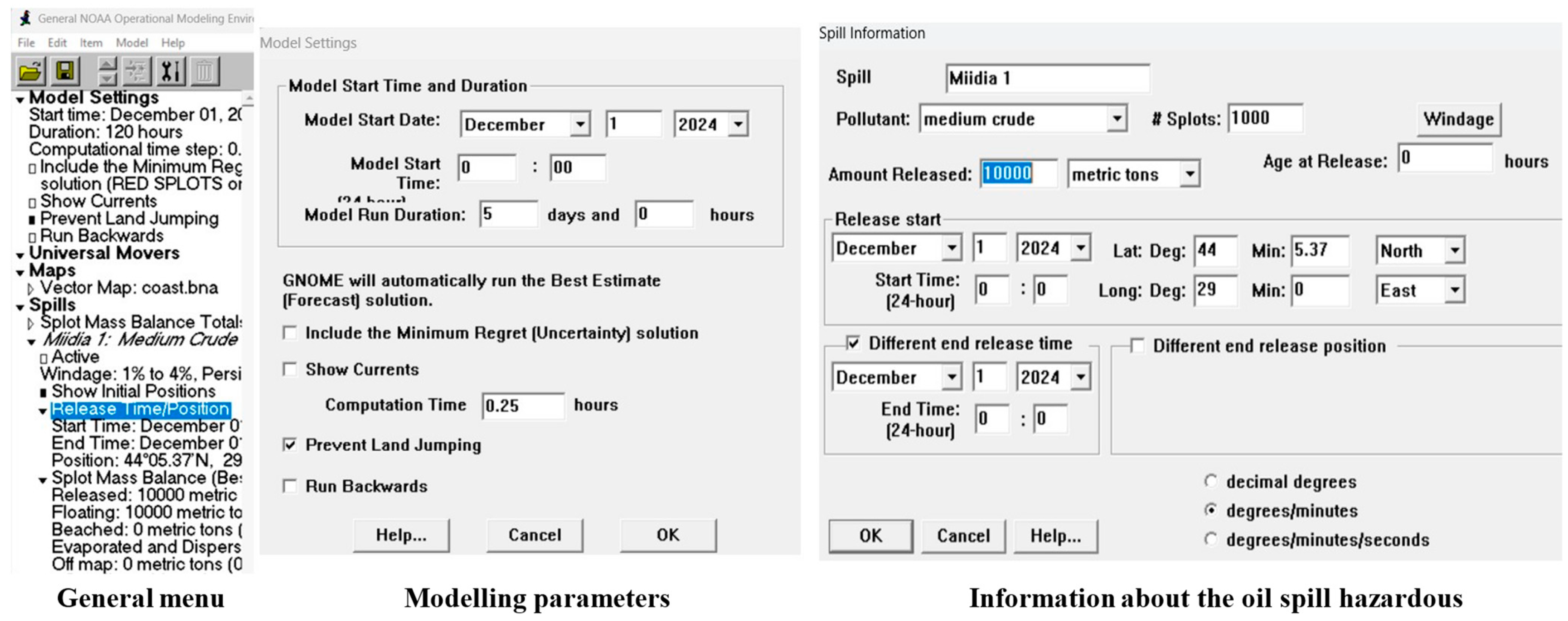
- executing Oil Spill Simulations in GNOME v.47.2.
- -
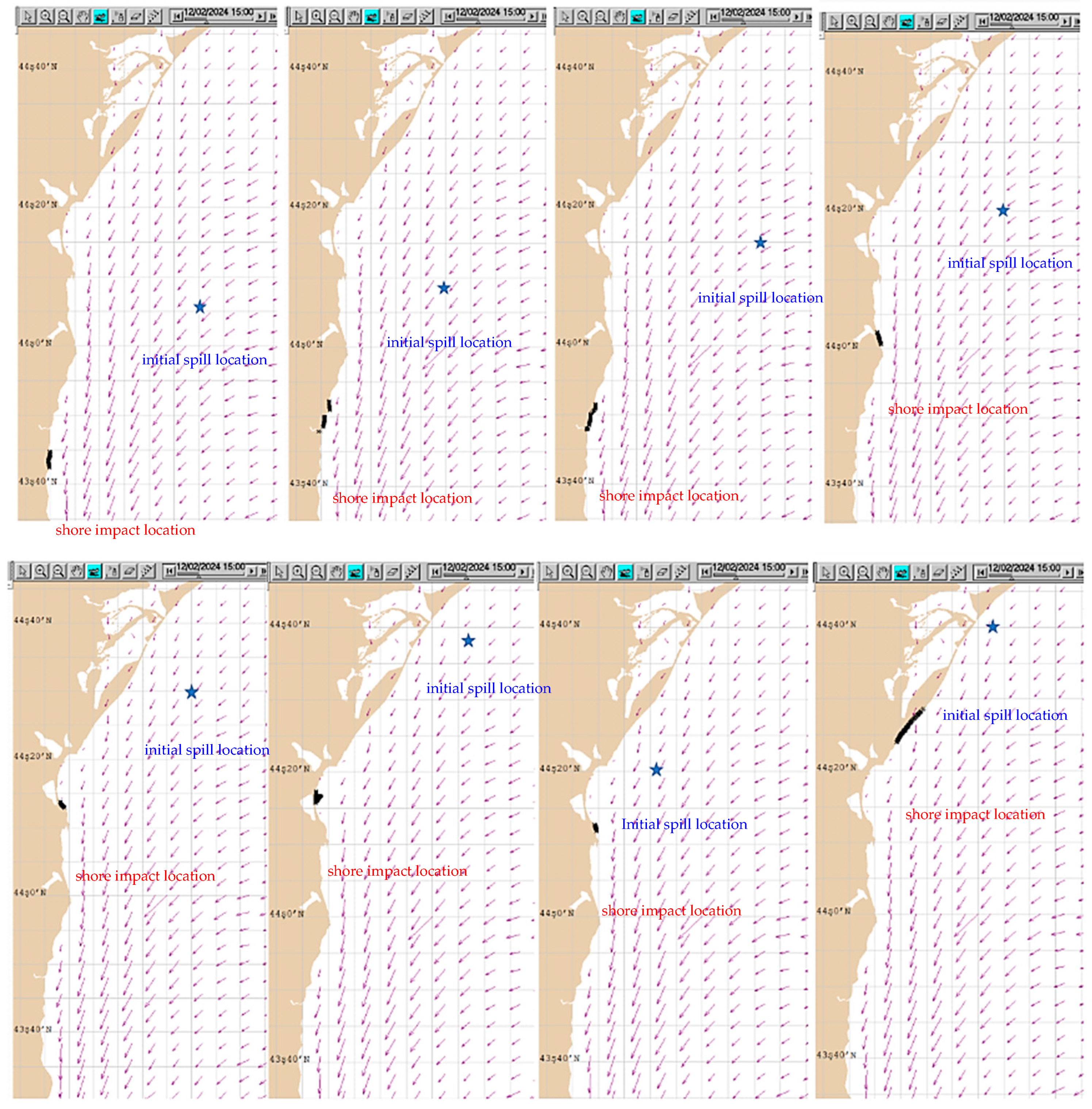
- shoreline impact location—the exact geographical coordinates and zones where the oil slick first made landfall;
- -
- time to shoreline contact—the duration, in hours, from the initial spill to the first contact with the coast;
- -
- proximity to critical infrastructure—whether the oil slick trajectory intersected with high-risk strategic locations, such as port facilities (e.g., Constanța, Midia), pipelines, or ecological protection zones.
3. Model Simulation in GNOME and ADIOS2 Software: Results Interpretation
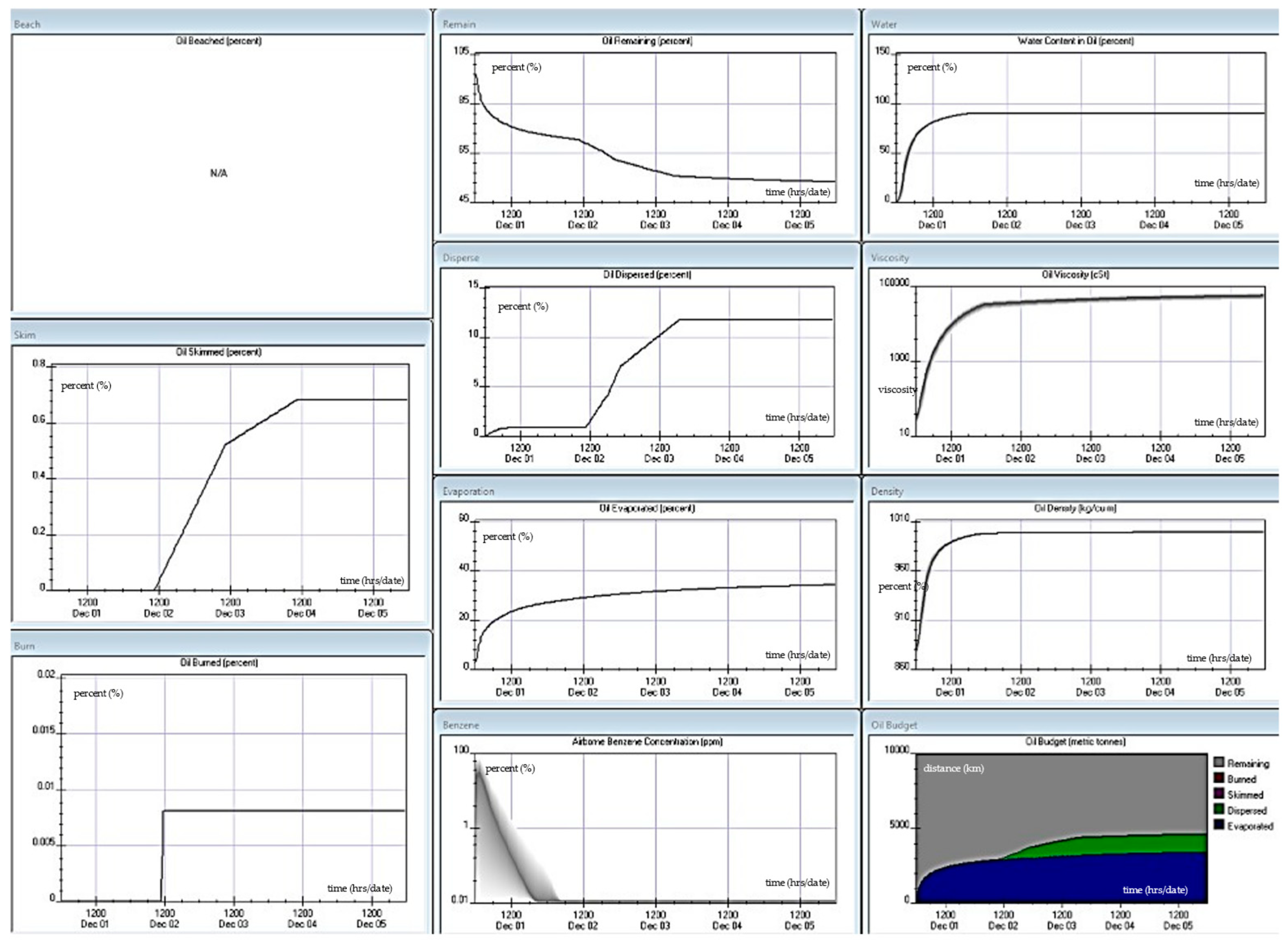
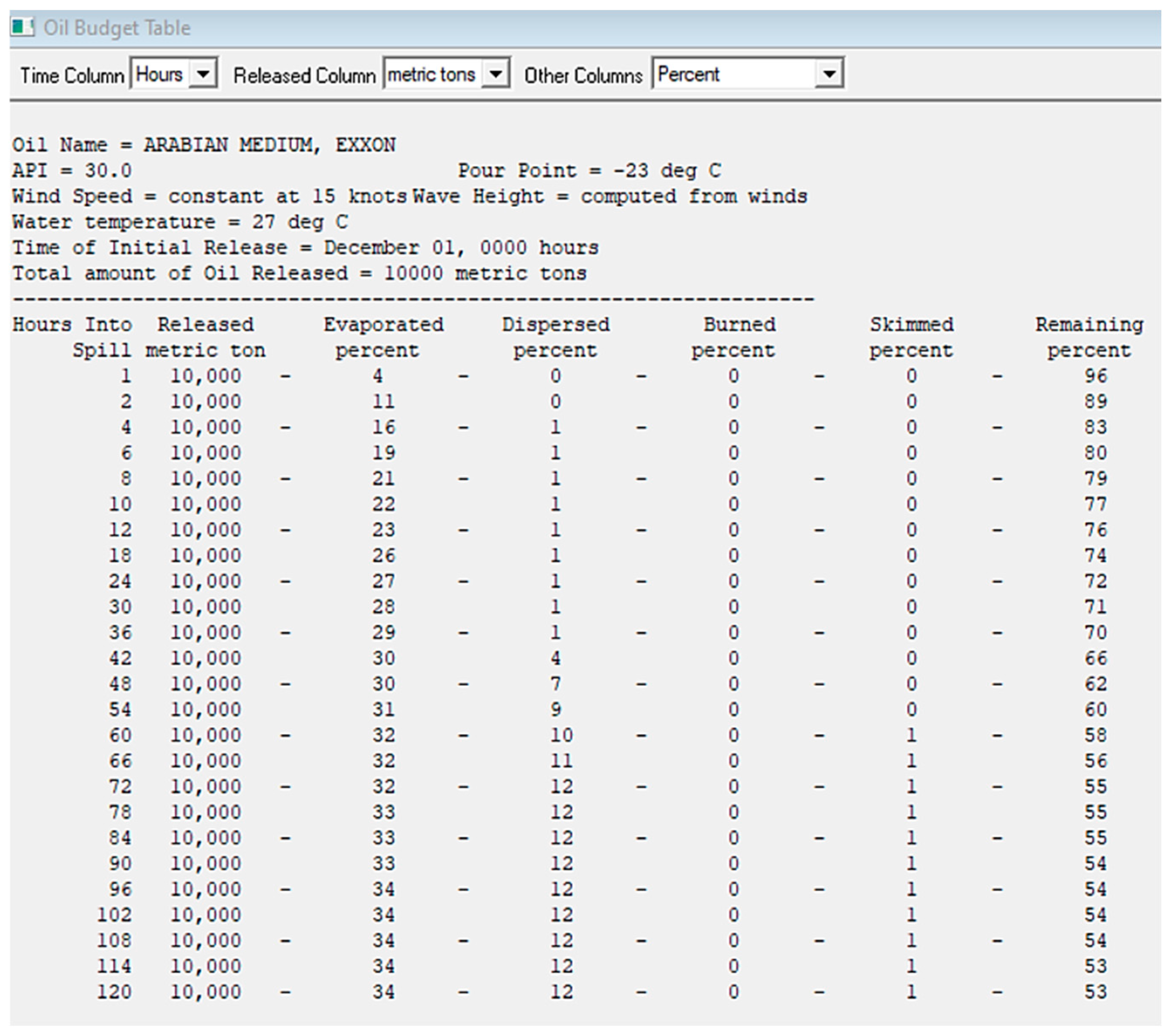
3.1. Scenario Analysis for Medium Crude Oil Spill—Static Simulation
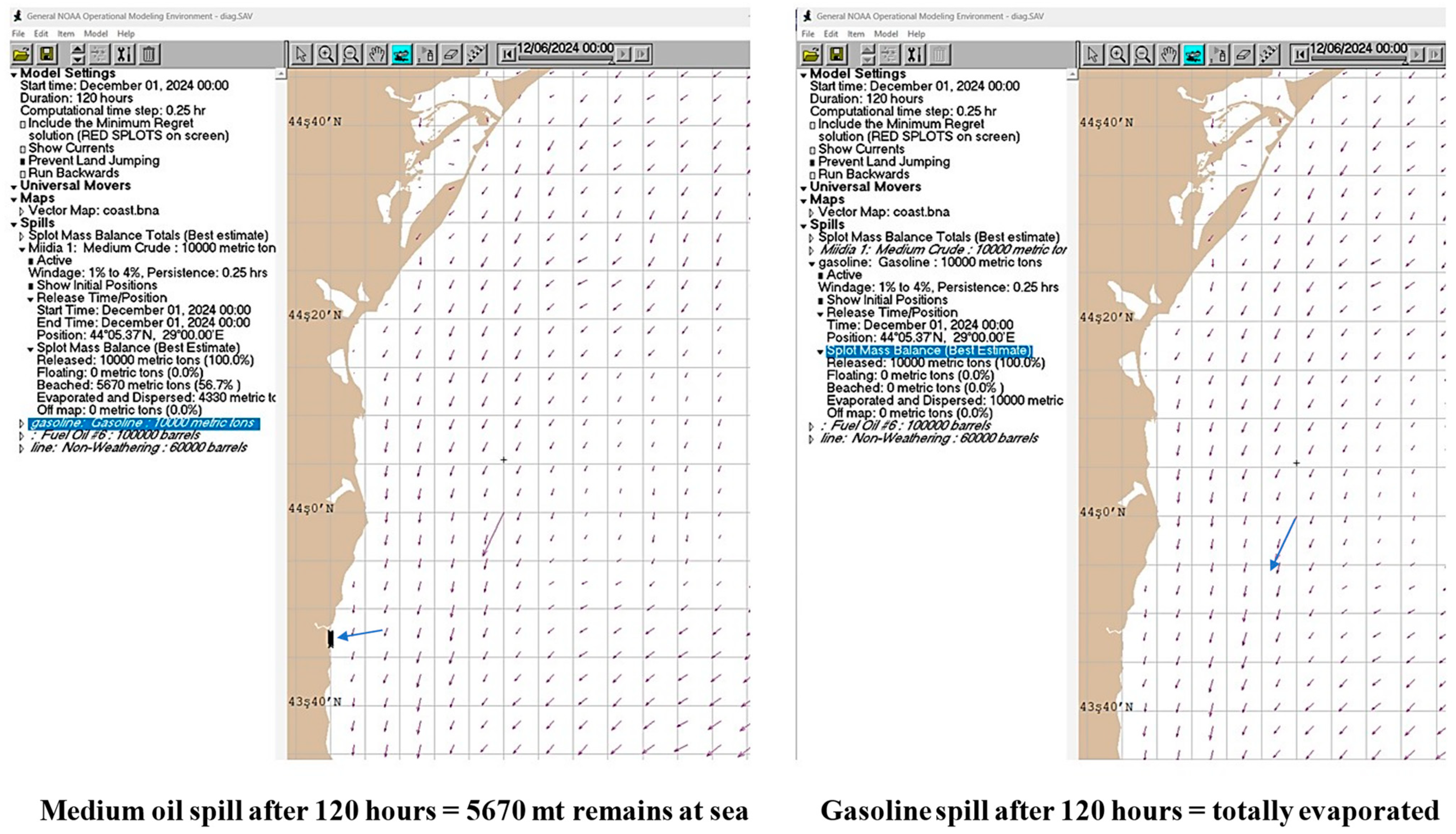
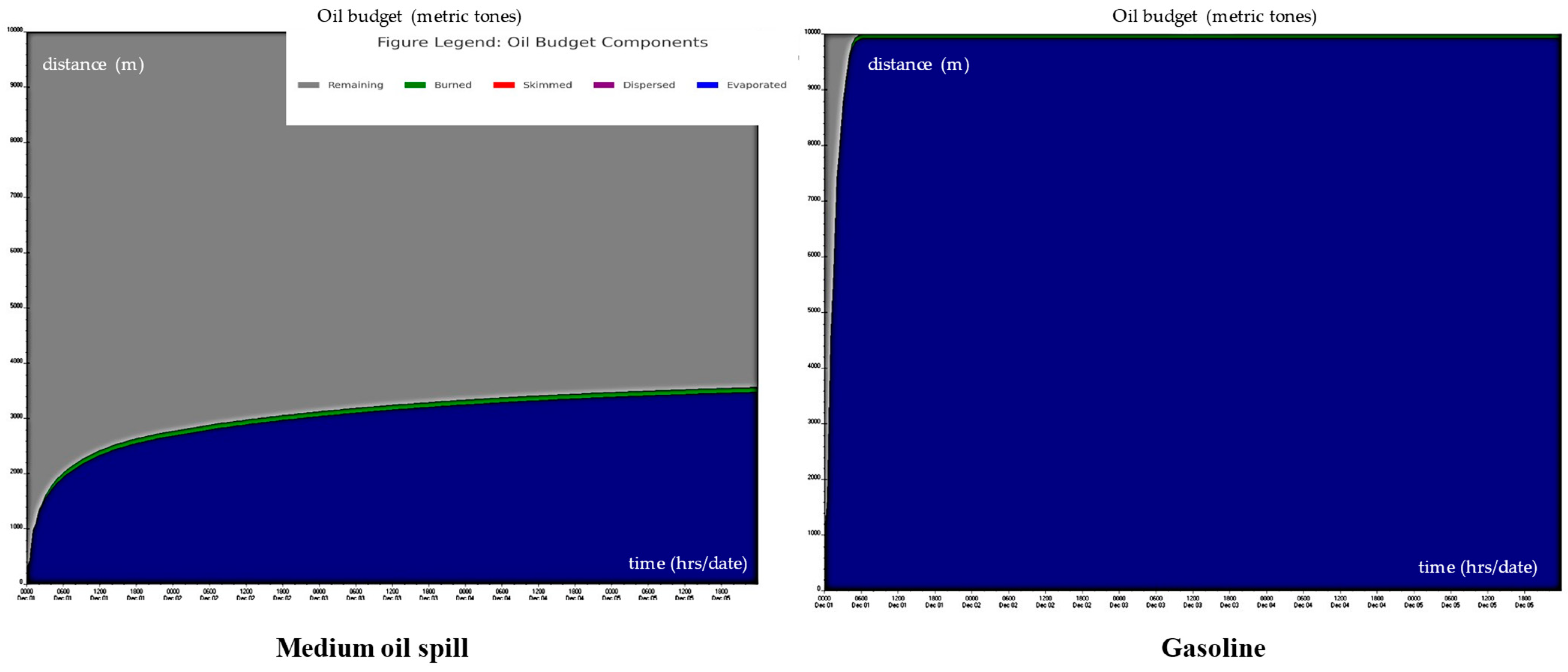
3.2. Scenario Analysis for Gasoline Spill—Static Simulation
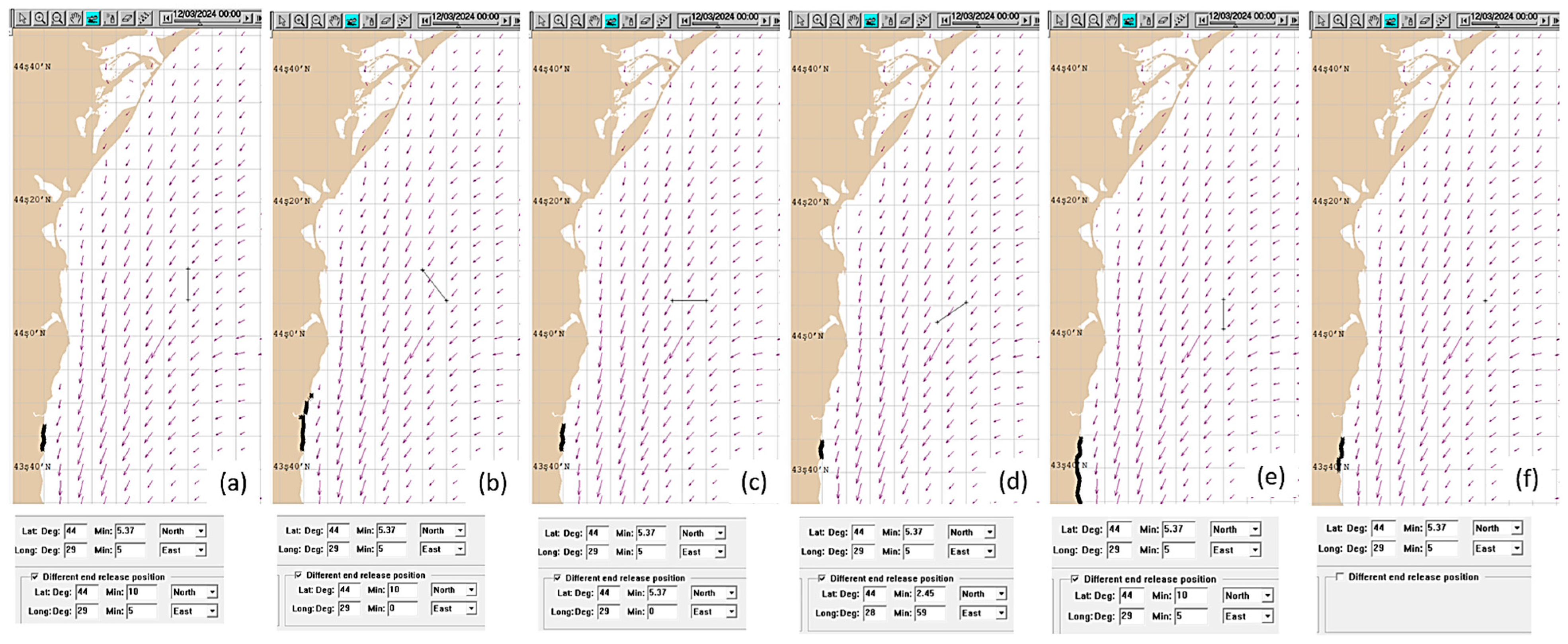
3.3. Scenario Analysis for Medium Crude Oil—Dynamic Simulation
- -
- the spill does not occur instantaneously, but rather over an extended time interval;
- -
- the source of the spill (i.e., the damaged vessel) is also in motion, leading to a broader distribution of hydrocarbons.
4. Simulation of Oil Spill Incidents: Case Study
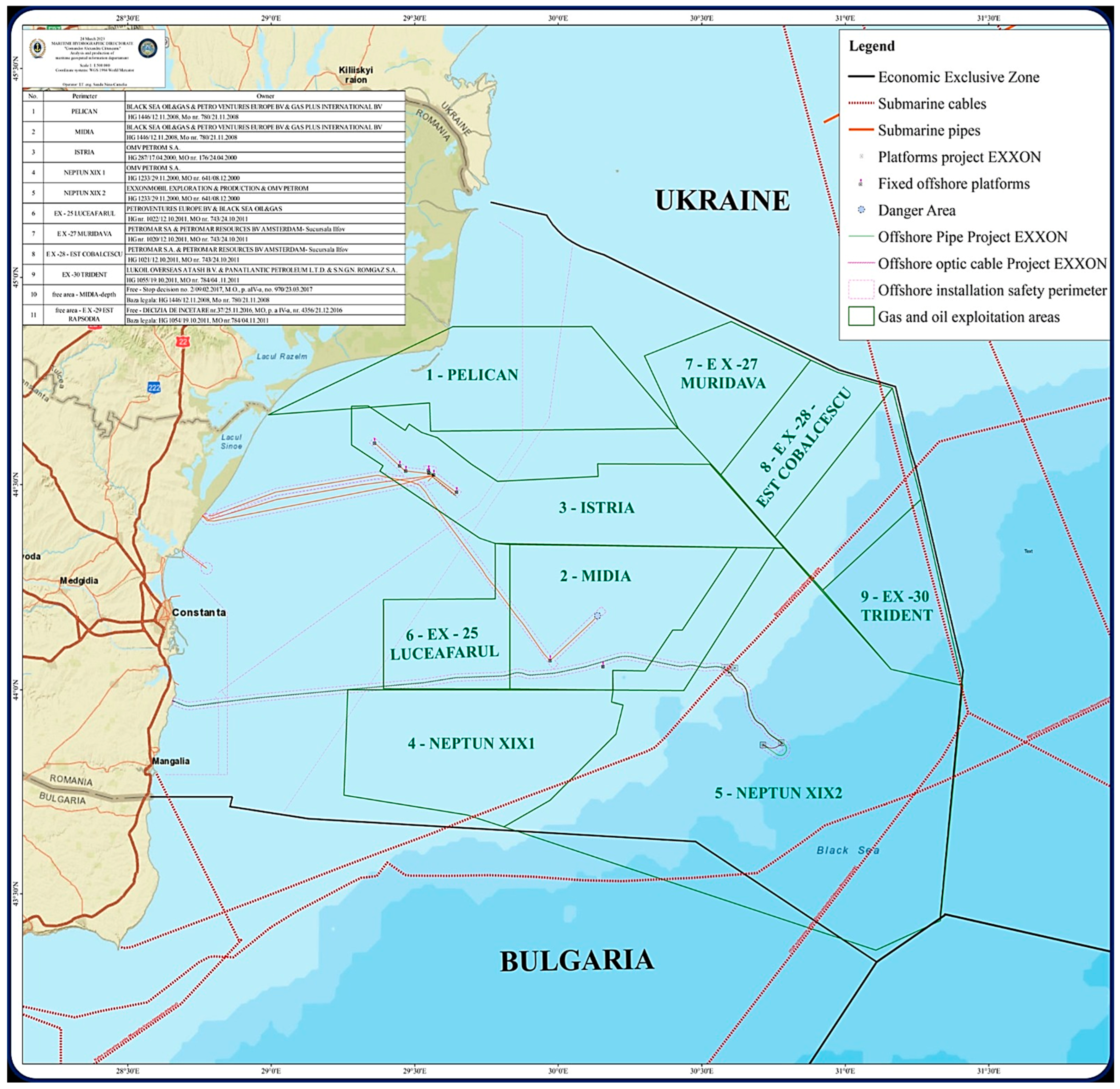
4.1. Simulation of Multiple Oil Spill Incidents in the Western Black Sea Area
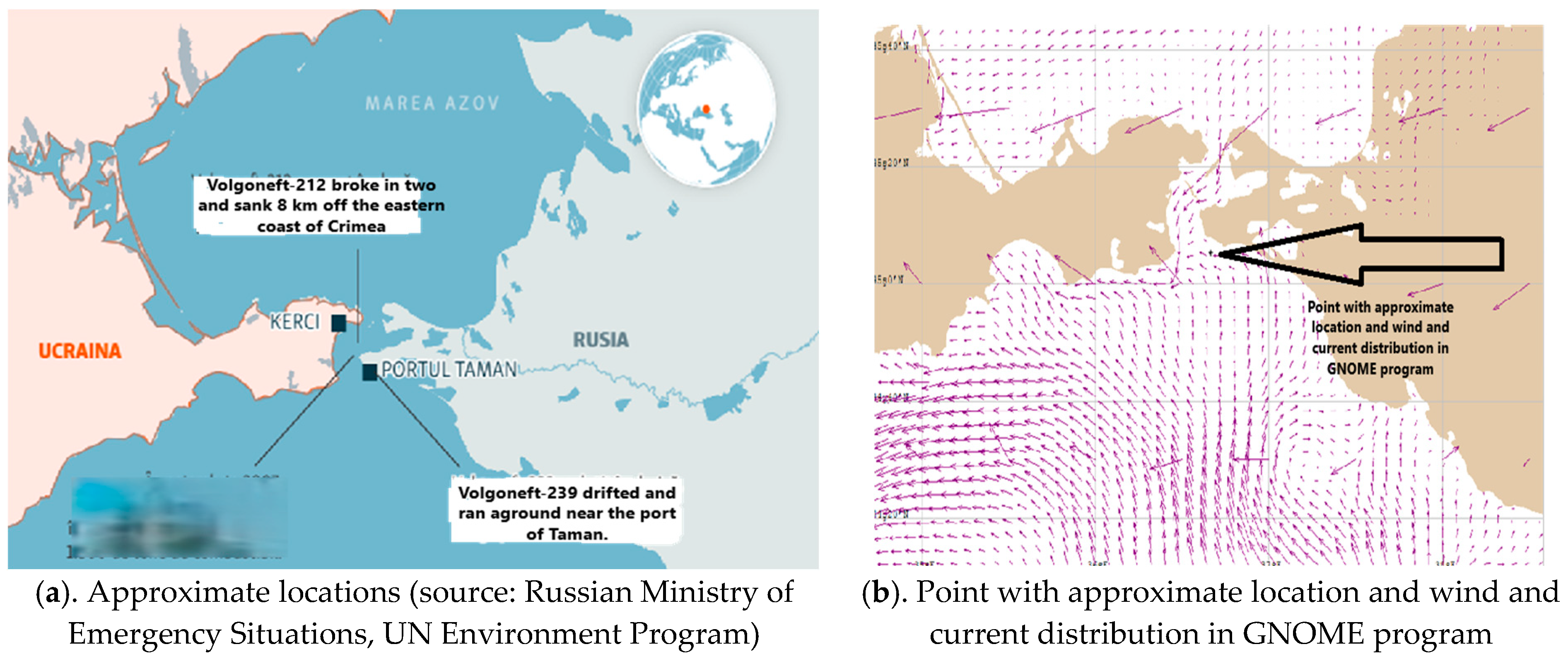
4.2. Simulation of Oil Spill Incident in Kerch Strait (Black Sea, December 2024)
- -
- the nature of the spilled hydrocarbon, including its density, viscosity, and chemical composition;
- -
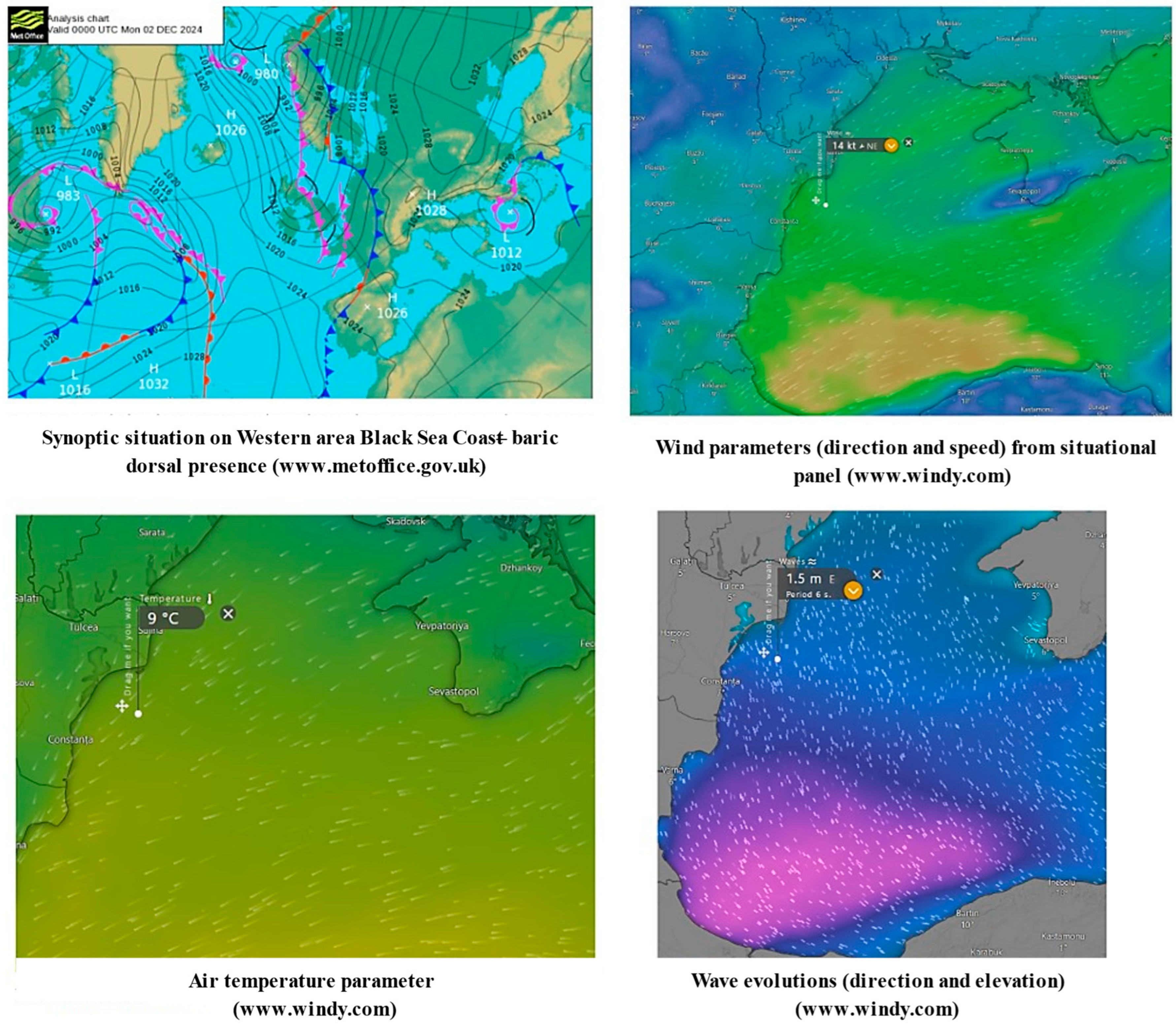
- hydro-meteorological parameters, such as surface and subsurface currents, wind speed and direction, wave height, and tidal activity;
- -
- the physicochemical properties of seawater, including temperature, salinity, and the presence of suspended particles (notably terrigenous particles transported by nearby rivers, which can enhance the adhesion and sedimentation of heavier hydrocarbon fractions);
- -
- the presence of algal blooms, which can exert a similar effect to suspended particulate matter, influencing hydrocarbon aggregation and distribution.
5. Conclusions
- -
- the study demonstrates that incorporating real-time meteorological and oceanographic data significantly improves simulation outcomes, making spill trajectory forecasts more reliable;
- -
- GNOME’s ability to dynamically adjust hydrodynamic parameters (wind, currents, tides) enables detailed scenario analysis.
- -
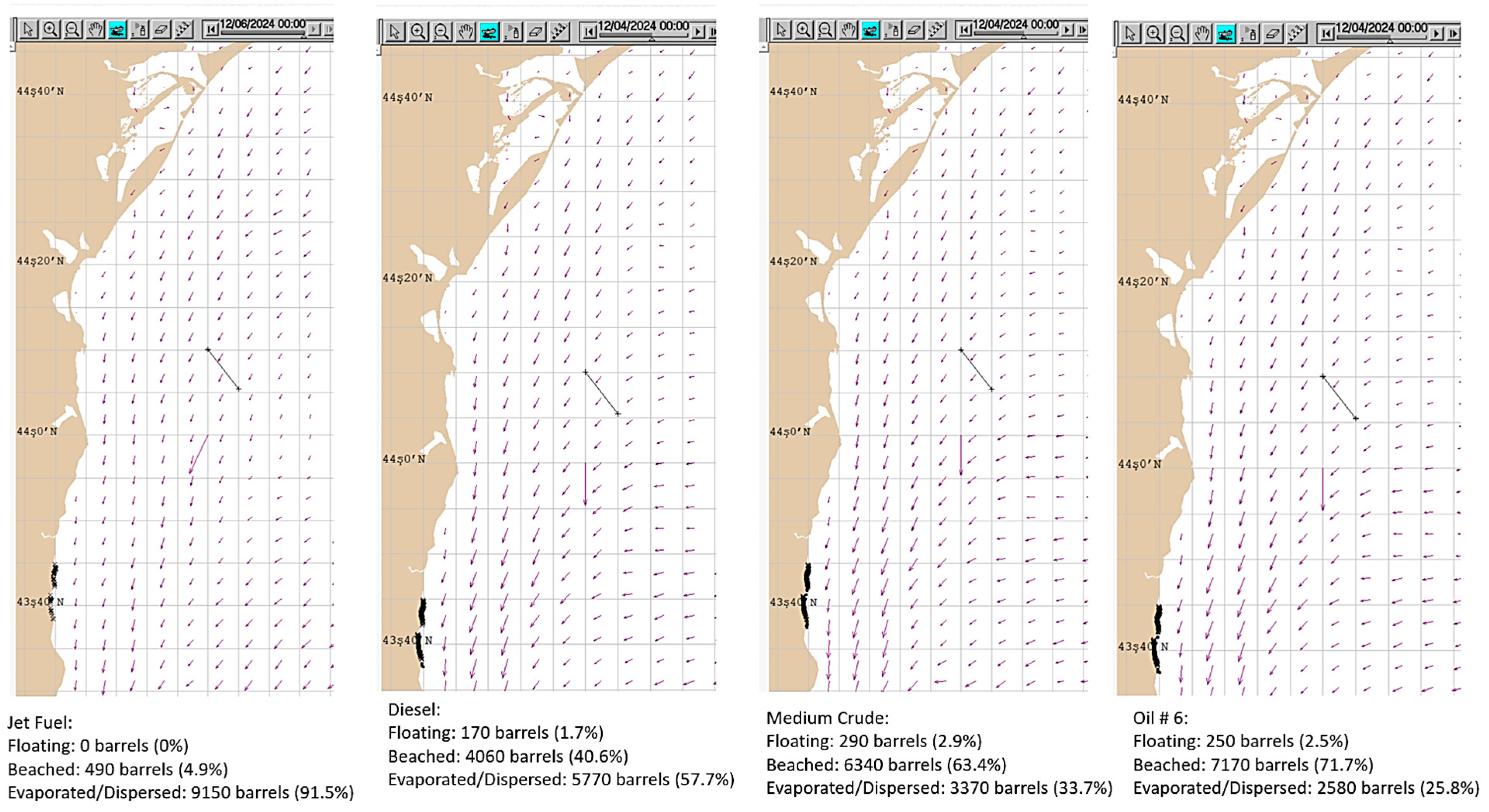
- lighter hydrocarbons (e.g., gasoline, aviation fuel) evaporate quickly, reducing the amount of pollutant reaching the shoreline;
- -
- heavier hydrocarbons (e.g., crude oil, fuel oil #6) persist longer in the marine environment and require mechanical recovery and intervention;
- -
- after four days post-spill, gasoline evaporates completely, while 63–71.7% of heavier oil fractions remain in the water or along the coast.
- -
- stationary spills create more localized contamination, while moving sources (e.g., damaged vessels drifting) cause a broader environmental impact;
- -
- the study shows that controlling the drift direction of a leaking vessel can help minimize the affected shoreline area.
- -
- using ADIOS software, the study evaluates various mitigation techniques, including: dispersants for breaking down oil slicks, skimming techniques for mechanical recovery, controlled burning to eliminate surface oil;
- -
- the findings emphasize the importance of rapid response to prevent oil from reaching sensitive infrastructure and ecosystems.
- -
- the modelling results highlight that oil spills can impact critical coastal infrastructure, including ports (Constanța and Midia) and economic zones;
- -
- the risk varies depending on spill location, type of hydrocarbon, and environmental conditions;
- -
- refinement of GNOME and ADIOS2 v.2.10.2 integration for oil spill trajectory and impact assessment.
- -
- identification of optimal intervention strategies based on real-time environmental data.
- -
- new insights into the relationship between spill duration, vessel movement, and shoreline contamination.
- -
- expand the use of remote sensing technology (e.g., satellites, drones, and real-time buoys) to enhance data accuracy for GNOME v.47.2 simulations;
- -
- develop automated data assimilation techniques to continuously update models with real-time meteorological and oceanographic inputs.
- -
- prioritize rapid response for heavier hydrocarbons, as they pose the greatest environmental threat due to their persistence;
- -
- implement vessel movement strategies to reduce shoreline contamination when a spill occurs from a drifting source;
- -
- increase response preparedness near critical infrastructure (e.g., ports, pipelines, economic hubs).
- -
- develop region-specific intervention plans based on the type of hydrocarbons most likely to be spilled;
- -
- enhance cross-border coordination among Black Sea nations to share real-time data and response capabilities;
- -
- enforce stricter regulations for maritime traffic and offshore oil operations to minimize spill risks.
- -
- integrate AI and machine learning to improve oil spill prediction models;
- -
- develop enhanced numerical models for complex spill scenarios (e.g., deepwater spills, Arctic conditions);
- -
- refine mitigation techniques for reducing the environmental impact of heavier hydrocarbons.
6. Authors’ Contribution
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Toz, A.C.; Buber, M. Performance evaluation of oil spill software systems in early fate and trajectory of oil spill: Comparison analysis of OILMAP and PISCES 2 in Mersin bay spill. Environ. Monit. Assess. 2018, 190, 551. [Google Scholar] [CrossRef] [PubMed]
- Barreto, F.T.; Dammann, D.O.; Tessarolo, L.F.; Skancke, J.; Keghouche, I.; Innocentini, V.; Winther-Kaland, N.; Marton, L. Comparison of the Coupled Model for Oil spill Prediction (CMOP) and the Oil Spill Contingency and Response model (OSCAR) during the DeepSpill field experiment. Ocean. Coast. Manag. 2021, 204, 105552. [Google Scholar] [CrossRef]
- Soussi, A.; Bersani, C.; Tomasoni, A.M. Oil spill trajectory: A comparison between 2D and 3D models. Urban Marit. Transp. XXVII 2021, 204, 117–128. [Google Scholar] [CrossRef]
- Zacharias, D.C.; Lemos, A.T.; Keramea, P.; Dantas, R.C.; da Rocha, R.P.; Crespo, N.M.; Sylaios, G.; Jovane, L.; da Silva Santos, I.G.; Montone, R.C.; et al. Offshore oil spills in Brazil: An extensive review and further development. Mar. Pollut. Bull. 2024, 205, 116663. [Google Scholar] [CrossRef] [PubMed]
- Longhi, R.P.; Ferreira Filho, V.J. Strategic location model for oil spill response vessels (OSRVs) considering oil transportation and weather uncertainties. Mar. Pollut. Bull. 2024, 207, 116829. [Google Scholar] [CrossRef] [PubMed]
- Dhaka, A.; Chattopadhyay, P. A review on physical remediation techniques for treatment of marine oil spills. J. Environ. Manag. 2021, 288, 112428. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Merlin, F.; Yang, M.; Lee, K.; Chen, B.; Liu, B.; Cao, Y.; Song, X.; Ye, X.; Li, Q.K.; et al. Recent advances in chemical and biological degradation of spilled oil: A review of dispersants application in the marine environment. J. Hazard. Mater. 2022, 436, 129260. [Google Scholar] [CrossRef] [PubMed]
- Bhardwaj, S. Developing and Evaluating Novel Solutions to Understand the I/O Bottlenecks in HPC Applications. University of Edinburgh. 2024. Available online: https://era.ed.ac.uk/bitstream/handle/1842/42870/Bhardwaj2024.pdf (accessed on 30 November 2024).
- Bi, B.; Guan, Y.; Qiao, D.; Chen, X.; Bao, M.; Wang, Z.; Li, Y. MXene/Graphene modified cellulose aerogel for photo-electro-assisted all-weather cleanup of high-viscous crude oil from spill. J. Hazard. Mater. 2023, 460, 132353. [Google Scholar] [CrossRef] [PubMed]
- Wei, Z.; Wei, Y.; Liu, Y.; Niu, S.; Xu, Y.; Park, J.-H.; Wang, J.J. Biochar-based materials as remediation strategy in petroleum hydrocarbon-contaminated soil and water: Performances, mechanisms, and environmental impact. J. Environ. Sci. 2024, 138, 350–372. [Google Scholar] [CrossRef] [PubMed]
- Mahmood, R.M. Trajectory modelling of oil spills: Comparing GNOME and ADIOS2 performance in offshore environments. Environ. Fluid Dyn. J. 2024, 29, 421–437. [Google Scholar]
- NOAA. Deepwater Horizon Response: Oil Spill Trajectory Forecasting Using GNOME; NOAA Technical Report; NOAA: Washington, DC, USA, 2011.
- Galt, J.A.; Lehr, W.J.; Payton, D. GNOME: A review of operational applications for oil spill trajectory modelling. Mar. Pollut. Bull. 2022, 84, 267–280. [Google Scholar]
- Lame, N.G.; Mahmood, R.M. Oil Spill Fate and Trajectory Simulation for the Buzzard Oilfield, Outer Moray Firth, United Kingdom. ResearchGate. 2024. Available online: https://www.researchgate.net/publication/384043781_OIL_SPILL_FATE_AND_TRAJECTORY_SIMULATION_FOR_THE_BUZZARD_OILFIELD_OUTER_MORAY_FIRTH_ABERDEEN_UNITED_KINGDOM (accessed on 30 November 2024).
- Güven, B. Combining GNOME and ADIOS2 for more accurate oil spill fate predictions. J. Environ. Monit. 2021, 13, 553–568. [Google Scholar]
- Zarochtunnisa, A.I.; Ludina, Y.M.; Ardhiani, N.E. SNAP dan General NOAA Oil Modeling Environment (GNOME) untuk Deteksi Sebaran Tumpahan Minyak (Oil Spill) di Selat Madura. Majalah Ilmiah. 2024. Available online: https://core.ac.uk/download/pdf/628397933.pdf (accessed on 30 November 2024).
- Zelenke, B.; O’Connor, C.; Barker, C.H.; Beegle-Krause, C.; Eclipse, L. Advancements in real-time oil spill forecasting with GNOME. J. Mar. Sci. Eng. 2012, 1, 67–82. [Google Scholar]
- Galt, J. Trajectory analysis for oil spills. Mar. Pollut. Bull. 1995, 30, 145–152. [Google Scholar]
- Sarker, S. Separation of Floodplain Flow and Bankfull Discharge: Application of 1D Momentum Equation Solver and MIKE 21C. CivilEng 2023, 4, 933–948. [Google Scholar] [CrossRef]
- Mezali, F.; Benmamar, S.; Naima, K.; Ameur, H. Evaluation of Stent Effect and Thrombosis Generation with Different Blood Rheology on an Intracranial Aneurysm by the Lattice Boltzmann Method. ScienceDirect. 2022. Available online: https://www.sciencedirect.com/science/article/abs/pii/S0169260722001432 (accessed on 30 November 2024).
- Yang, L.; Xie, L.; You, J.; Liang, P.; Zhang, T. Mechanisms of Intraseasonal Oscillation in Equatorial Surface Currents in the Pacific Ocean Identified by Neural Network Models. 2025. Available online: https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/2024JC021514 (accessed on 30 November 2024).
- Harris, E. Drivers of Warm Water Variability in Atlantic Hurricane Regions. Ph.D. Thesis, University of Southampton, Southampton, UK, 2025; 109p. Available online: https://eprints.soton.ac.uk/497885 (accessed on 30 November 2024).
- Huang, W.; Li, C.; Rivera-Monroy, V.H. Cold fronts control multiscale spatiotemporal hydroperiod patterns in a man-made subtropical coastal delta (Wax Lake Region, Louisiana USA). Ocean Dyn. 2024, 74, 355–372. [Google Scholar] [CrossRef]
- Feizabadi, S.; Li, C.; Hiatt, M. A numerical experiment of cold front-induced circulation in Wax Lake Delta: Evaluation of forcing factors. Sec. Phys. Oceanogr. 2023, 10, 1228446. [Google Scholar] [CrossRef]
- Cernuda, J.; Logan, L.; Gainaru, A.; Klasky, S.; Lofstead, J.; Kougkas, A.; Sun, X.H. Hades: A context-aware active storage framework for accelerating large-scale data analysis. In Proceedings of the 2024 IEEE 24th International Symposium on Cluster, Cloud and Internet Computing (CCGrid), Philadelphia, PA, USA, 6–9 May 2024; Available online: https://www.osti.gov/servlets/purl/2441008 (accessed on 30 November 2024).
- Williams, J.J.; Medeiros, D.; Costea, S.; Tskhakaya, D.; Poeschel, F.; Widera, R.; Huebl, A.; Klasky, S.; Podhorszki, N.; Kos, L.; et al. Enabling High-Throughput Parallel I/O in Particle-in-Cell Monte Carlo Simulations with openPMD and Darshan I/O Monitoring. IEEE Cluster Computing. 2024. Available online: https://arxiv.org/pdf/2408.02869 (accessed on 30 November 2024).
- Duwe, K.; Kuhn, M. DAI: How Pre-Computation Speeds up Data Analysis. International Conference on Computational Science. 2024. Available online: https://www.iccs-meeting.org/archive/iccs2024/papers/148330106.pdf (accessed on 30 November 2024).
- Song, Y.; Li, Y.; Li, G.; Liu, Y.; Wu, T.; Yin, S.; Xue, W.; Wang, J. A Data Optimizer for Region-Aware Self-describing Files in Scientific Computing. ACM Cloud Computing Conference. 2024. Available online: https://dl.acm.org/doi/pdf/10.1145/3698038.3698526 (accessed on 30 November 2024).
- Efendi, E.J. Methods of Oil Spill Cleanup: A Comparative Review. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 9 May 2024. [Google Scholar] [CrossRef]
- Fingas, M. Oil Spill Science and Technology; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Johansen, Ø.; Brandvik, P.J.; Farooq, U. Challenges in deepwater oil spill modelling: A review of existing approaches and future directions. Mar. Environ. Res. 2023, 112, 104865. [Google Scholar]
- Lehr, W.J.; Simecek-Beatty, D. Shoreline Impact Modelling of Oil Spills Using GNOME and ADIOS2; NOAA Technical Report; NOAA: Washington, DC, USA, 2020. [Google Scholar]
- Lehr, W.; Simecek-Beatty, D. The ADIOS oil spill model: A decision support tool. Environ. Model. Softw. 2000, 15, 125–134. [Google Scholar]
- National Oceanic and Atmospheric Administration (NOAA). GNOME User Manual. Available online: https://gnome.orr.noaa.gov (accessed on 30 November 2024).
- Scutaru, G. Black Sea’s Offshore Energy Potential and Its Strategic Role at a Regional and Continental Level. New Strategy Center, Bucharest. 2024. Available online: https://newstrategycenter.ro/wp-content/uploads/2024/03/Studiu-Kas-Black-Sea-final-version.pdf (accessed on 30 November 2024).
- Available online: https://www.defenseromania.ro/la-limita-unui-dezastru-ecologic-major-in-marea-neagra-petrolierele-rusesti-reprezinta-o-amenintare-pentru-mediu-rusia-foloseste-nave-foarte-vechi-de-50-de-an_631757.html (accessed on 24 December 2024).
- Available online: https://www.digi24.ro/stiri/externe/pata-de-petrol-din-stramtoarea-kerci-a-ajuns-pe-coasta-marii-azov-3076655 (accessed on 11 January 2025).
- Available online: https://www.euractiv.ro/eu-elections-2019/pacura-de-la-petrolierele-rusesti-de-langa-kerci-se-strange-cu-lopeti-70759 (accessed on 30 November 2024).








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atodiresei, D.; Popa, C.; Dobref, V. Simulating Oil Spill Evolution and Environmental Impact with Specialized Software: A Case Study for the Black Sea. Sustainability 2025, 17, 3770. https://doi.org/10.3390/su17093770
Atodiresei D, Popa C, Dobref V. Simulating Oil Spill Evolution and Environmental Impact with Specialized Software: A Case Study for the Black Sea. Sustainability. 2025; 17(9):3770. https://doi.org/10.3390/su17093770
Chicago/Turabian StyleAtodiresei, Dinu, Catalin Popa, and Vasile Dobref. 2025. "Simulating Oil Spill Evolution and Environmental Impact with Specialized Software: A Case Study for the Black Sea" Sustainability 17, no. 9: 3770. https://doi.org/10.3390/su17093770
APA StyleAtodiresei, D., Popa, C., & Dobref, V. (2025). Simulating Oil Spill Evolution and Environmental Impact with Specialized Software: A Case Study for the Black Sea. Sustainability, 17(9), 3770. https://doi.org/10.3390/su17093770