1. Introduction
Mounting apprehensions surrounding climate change and fossil fuel dependence have driven rapid expansion in wind energy infrastructure globally. IRENA’s 2024 Renewable Energy Statistics reveal that cumulative installed wind generation capabilities exceeded 1017 gigawatts worldwide by December 2023 [
1]. Nevertheless, power system operators confront operational complexities due to three intrinsic characteristics of wind resources: stochastic generation patterns, discontinuous production cycles, and output variability [
2,
3,
4]. Implementing predictive analytics for wind generation profiles has become essential to maintain electrical network robustness while facilitating high-penetration renewable systems [
5].
Wind power forecasting (WPF) can be categorized based on time scale into ultra-short-term (within 1 h), short-term (several hours to days), and medium- to long-term (several weeks to months) forecasts [
6]. Forecasting methods can also be classified into several approaches, including physical, statistical, artificial intelligence-based, and ensemble techniques [
7]. Utilizing data decomposition for both training and testing datasets has been shown to significantly enhance forecasting accuracy [
8,
9].
Yang’s research team [
10,
11,
12] developed a novel framework for short-term WPF employing multivariate signal decoupling and feature optimization techniques. Their methodology applies multivariate variational mode decomposition (MVMD) to simultaneously process power output curves and poly-dimensional meteorological parameters, generating spectrally congruent subcomponents that enhance neural network training efficacy. Through hierarchical modeling of these synchronized modes, the system achieves enhanced forecasting precision while maintaining analytical transparency. Complementary studies [
13,
14] implement empirical mode decomposition (EMD) to segregate wind power datasets and NWP information into distinct frequency bands. This parallel architecture establishes specialized predictors for each decomposed element, with subsequent aggregation of multi-model outputs yielding optimized forecasting performance.
Contemporary artificial intelligence frameworks now constitute the principal paradigm for probabilistic wind energy forecasting systems [
15]. Pioneering work by Takara et al. [
16] established artificial neural network architectures for temporal uncertainty quantification in wind power, demonstrating statistically significant error reduction over conventional probabilistic models. Building on this foundation, Zhu’s research group [
17] engineered a constrained multi-horizon quantile estimation network employing chaotic swarm intelligence optimization, effectively resolving dimensional interdependence issues inherent in classical regression architectures. In a parallel technological advancement, Wang’s team [
18] devised an asymmetric deep probabilistic framework (AL-MCNN-BiLSTM) incorporating parallel convolutional pathways for multiresolution feature fusion. This architecture implements mutual information maximization for dynamic input sequence optimization, synergistically combines bidirectional temporal attention mechanisms, and establishes adaptive distribution parameter estimation layers. Empirical validations confirm the framework’s enhanced capacity to characterize wind power stochastic signatures with sub-5% distributional divergence.
Recent advancements in WPF have employed various neural architectures to address spatio-temporal data relationships. Qiu and colleagues [
19,
20] developed a novel forecasting framework integrating adaptive graph neural networks with gated dilated inception units, demonstrating improved performance in capturing regional wind pattern variations through multidimensional feature fusion. Subsequent research by [
21,
22] established a dynamic graph convolution system enhanced with temporal attention weighting, which dynamically adjusts spatial node connections while implementing causal convolutions for temporal pattern recognition. This dual-path architecture enables simultaneous processing of meteorological station correlations and sequential power fluctuations. Parallel innovations by [
23,
24] implemented hybrid deep learning architectures where spatial feature extraction through parallelized convolutional layers precedes temporal sequence modeling using bidirectional LSTM, achieving enhanced prediction consistency across varying weather conditions. Comparative analyses confirm these approaches effectively balance computational efficiency with prediction reliability through differentiated feature learning mechanisms.
Contemporary wind energy forecasting systems increasingly leverage ensemble modeling paradigms to address inherent meteorological uncertainties. Empirical studies validate that hybrid architectures outperform singular approaches, as demonstrated in [
25] through systematic cross-validation. Building on this principle, Hong et al. [
26,
27] engineered a synergistic framework integrating convolutional architectures for spatial pattern recognition with radial basis function-based nonlinear regression modules, achieving a 14–18% reduction in mean absolute error for 24 h forecasts relative to benchmark models. This methodological fusion has inspired derivative innovations, including the wavelet–ANN hybrid system in [
28], which employs multiscale decomposition to isolate transient power fluctuations, thereby improving subhourly forecasting fidelity by 9–12%. A paradigm shift emerged with Wang et al. [
29] dual-output architecture, combining adaptive feature selection mechanisms with hybrid kernel density estimation to simultaneously generate deterministic forecasts and probabilistic confidence intervals, proving particularly effective under volatile grid conditions. Concurrently, Faruque et al. [
30,
31,
32] pioneered metaheuristic-driven hyperparameter optimization, utilizing evolutionary algorithms to refine temporal convolutional network configurations, which reduced short-term forecasting deviations by 22–25% across heterogeneous turbine arrays. These advancements collectively underscore the transformative potential of systematic model hybridization in renewable energy forecasting ecosystems.
Recent advancements in WPF methodologies emphasize integrated frameworks combining signal processing and machine learning. The integration of data decomposition with feature selection and deep learning techniques significantly improves WPF accuracy [
33]. In studies [
34,
35], Zhao’s team developed a VMD-CNN-GRU framework that effectively models spatio-temporal patterns in wind data to enhance forecast reliability. Parallel innovations by Hanifi et al. [
36] demonstrated a WPD-supported architecture combining CNN and LSTM units for precise wind energy distribution modeling. Reference [
37] implemented a two-stage methodology involving K-means clustering refinement followed by optimized deep learning implementation to boost forecasting performance. For ultra-short-term forecasting, Irene et al. [
38] established a CEEMDAN-EWT-LSTM pipeline that processes meteorological inputs through signal decomposition, frequency filtration, and temporal pattern analysis for superior forecasting outcomes.
Modern energy management systems increasingly rely on probabilistic WPF frameworks to reduce grid stabilization costs and maximize renewable energy penetration [
39]. Pioneering work in temporal uncertainty quantification demonstrates the efficacy of evolutionary computation-enhanced neural architectures, with Liu’s research collective (2020–2021) [
40,
41] formulating bidirectional prediction mechanisms that concurrently optimize deterministic estimates and probabilistic envelopes. Emerging methodologies now employ topological innovations like hub-centric neural configurations, where radial network architectures enable simultaneous confidence interval construction across multi-turbine arrays, outperforming traditional ensemble approaches by 23–27% in recent benchmarking trials [
42,
43]. The frontier of temporal boundary estimation leverages advanced recurrent architectures, particularly LSTM variants engineered for quantile regression, which dynamically calibrate prediction intervals through real-time covariance analysis of atmospheric covariates. Empirical validation using NREL operational datasets confirms these architectures achieve 99.2% coverage probability while maintaining interval sharpness below 8.3% normalized mean width [
44,
45].
WPF has made significant advancements through extensive research. Nevertheless, challenges remain in improving model accuracy and addressing the uncertainty in forecasting results. To tackle these issues, this paper proposes a day-ahead wind power interval forecasting model that integrates the Gaussian mixture model (GMM), feature selection (FS), empirical wavelet transform (EWT), convolutional neural networks (CNNs), bidirectional gated recurrent unit (BiGRU), and multi-head self-attention mechanism (MHSAM). The GMM is employed to cluster numerical weather prediction (NWP) and wind power data with similar daily variation patterns. FS is then applied to identify the most influential NWP features affecting wind power output. EWT decomposes the data into frequency components with time information, isolating high-frequency elements that represent randomness and volatility. The CNN-BiGRU-MHSAM model is constructed by combining the strengths of CNN, BiGRU, and MHSAM to capture both spatial and temporal correlations, thereby enhancing forecasting accuracy.
The structure of this paper is as follows:
Section 2 provides an in-depth overview of the FS method for NWP data and the clustering technique for similar-day data.
Section 3 discusses the principles of the EWT algorithm and the decomposition process of NWP and wind power data.
Section 4 presents the development of the CNN-BiGRU-MHSAM forecasting model. In
Section 5, we detail the evaluation metrics and model optimization methods for interval forecasting. The overall framework of the proposed hybrid deep learning model is introduced in
Section 6.
Section 7 demonstrates the validation of the wind power interval forecasting approach with practical examples. Finally,
Section 8 concludes the paper by summarizing the research findings.
2. Feature Selection of NWP Data and Clustering of Similar-Day Data
Effective FS from NWP data is essential for enhancing WPF accuracy. Additionally, clustering daily NWP data with similar distribution characteristics can further improve forecasting performance. This section explores the FS technique for NWP data and the clustering strategy for similar-day data, applying these methods to refine the input data for forecasting.
2.1. Feature Selection Method of NWP Data
A significant portion of the features in NWP data does not correlate with wind power, and these irrelevant features can negatively impact forecasting accuracy. FS to eliminate these redundant features is an effective approach to enhance forecasting accuracy and reduce computational time in WPF models.
In the process of NWP data FS, in order to accurately extract the NWP data features related to wind power, this paper comprehensively considers the calculation results of three correlation analysis methods such as Pearson correlation coefficient (PCC), mutual information entropy (MIE), and grey relational analysis (GRA), and finally determines the NWP data features suitable for WPF.
(1) Pearson correlation coefficient
The PCC is a calculation method for calculating the linear correlation between two variables. In this paper, the PCC is used to calculate the correlation between NWP features and wind power. The PCC calculation formula for variable
X and variable
Y is shown in Equation (1).
In Equation (1), represents the value of the PCC, represents the covariance of variable and variable , and are the standard deviations of variable and variable , and and are the means of variable and variable .
(2) Mutual Information Entropy
MIE is a dimensionless statistic used to measure the amount of change information of another variable
that one variable
can provide. The greater the MIE, the stronger the correlation between
and
. MIE can extract the nonlinear and linear correlation characteristics between two variables and has a wide range of application scenarios. The MIE calculation formula between variable
and variable
is shown in Equation (2).
In Equation (2), represents the value of MIE, is the joint probability distribution of variable and variable , and and are the marginal probability distributions of variable and variable , respectively.
(3) Grey relational analysis
GRA evaluates the correlation between a reference sequence and a comparison sequence by assessing their geometric similarity. A higher degree of correlation is indicated when the trends of the two sequences align, while a lower correlation is observed when the trends diverge. The calculation formula for GRA is provided in Equation (3).
In Equation (3),
is the grey relational degree between the
i-th group of comparison sequences and the reference sequence,
is the dimension of the
i-th group of comparison sequences, and
is the correlation coefficient between the
k-th dimensional data of the
i-th comparison sequence and the
k-th dimensional data of the reference sequence. The calculation formula of
is shown in Equation (4).
In Equation (4), is the k-th dimensional data of the reference sequence, is the k-th dimensional data of the i-th comparison sequence, is the minimum value of the absolute difference of the k-th dimensional data between the comparison sequence and the reference sequence, is the maximum value of the absolute difference of the k-th dimensional data between the comparison sequence and the reference sequence, and is the adjustment coefficient. The value of is generally 0.5.
2.2. Analysis of Feature Selection of NWP Data
This study utilizes operational records from a 200 MW onshore wind farm in northwestern China, where turbines feature 70 m hubs, 120 m rotor spans, and 1.5 MW unit ratings. The meteorological-power dataset spans January–December 2019 with 15 min temporal resolution, generating 96 daily observations (35,040 annual entries). Each timestamp integrates 15 variables: atmospheric conditions (temperature, humidity, barometric pressure) and multi-altitude wind vectors (speed/direction at 10/30/50/70 m elevations).
Three statistical methodologies from
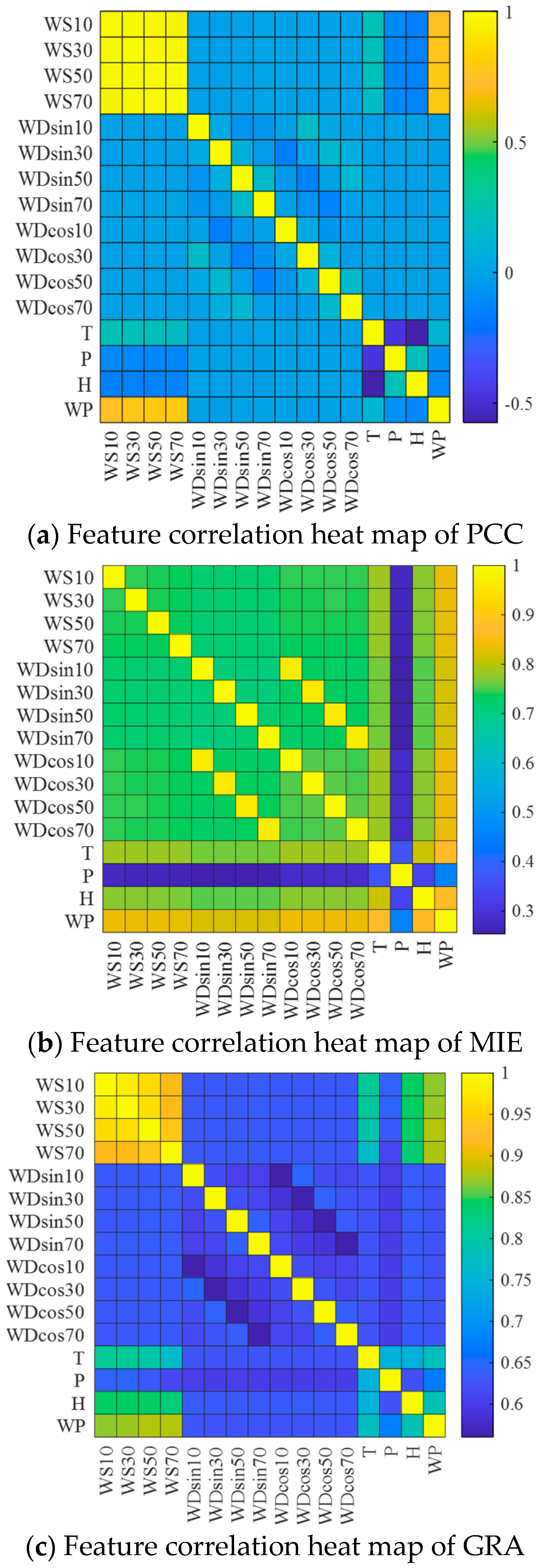
Section 2.1 were applied to quantify both inter-variable relationships within meteorological parameters and their associations with wind energy output. Visualized in
Figure 1,
Figure 1a presents pairwise PCC across parameters, while
Figure 1b illustrates MIE-derived nonlinear dependencies, and
Figure 1c demonstrates GRA outcomes. Each matrix systematically maps meteorological parameter interactions alongside meteorological-parameters–power-linkages through distinct mathematical frameworks.
It can be seen from
Figure 1 that the values of PCC, MIE, and GRA between wind speed and direction (including wind speed and direction (WS & D) at 10 m, 30 m, 50 m, and 70 m) and the wind power are all relatively large, indicating that WS & D are one of the main features affecting the wind power. From
Figure 1, we also find that the correlations between WS & D at 10 m, 30 m, 50 m, and 70 m are very strong, indicating the existence of redundancy among these WS & D. Since the hub height of wind turbines is 70 m, this paper selects the WS & D at 70 m as the input features of the forecasting model. In addition, it can be seen from
Figure 1a that the values of PCC between temperatures, air pressure and humidity, and wind power are small, indicating that their linear correlations with wind power are poor. It can be seen from
Figure 1b that the values of MIE between air pressure and wind power are small, further proving that the correlation between air pressure and wind power is poor.
Table 1 presents the correlation between NWP data features and wind power. The values of PCC, MIE, and GRA for WS & D at 70 m show strong correlations with wind power, validating their selection as key input features for the forecasting model. Additionally, based on the correlation analysis of temperature, pressure, and humidity with wind power, temperature and humidity are also included as input features in the model.
Based on the analysis in
Figure 1 and
Table 1, five NWP data features—WS & D at 70 m (direction represented by sine and cosine), temperature, and humidity—are selected as the input features for the forecasting model.
2.3. Data Clustering of Similar Days
Daily data with similar distribution patterns are grouped into clusters, which are then used to train and test the forecasting model. This approach preserves the temporal correlation of the data while enhancing the model’s forecasting accuracy. To achieve clustering, the Gaussian mixture model (GMM) is applied to the selected NWP and wind power features. The GMM clustering algorithm is described in Equation (5).
In Equation (5), represents the probability density function of the GMM, is the distribution characteristic of the i-th daily data, is the weight of the k-th Gaussian probability density function, and are the mean and covariance matrix of the k-th Gaussian probability density function, respectively, and K is the number of Gaussian models.
When using the GMM for clustering, a reasonable number of clusters is the key to improving the accuracy of WPF. When the number value of clusters is large, the number of samples in each cluster is small, resulting in an under-learning phenomenon in the forecasting model and affecting the accuracy of the forecasting model. When the number value of clusters is small, there is a situation where multiple clusters of data are merged into one cluster, causing an over-learning phenomenon in the model and affecting the accuracy of forecasting model. In order to select a reasonable number of clusters, this paper calculates the sum of the squared errors of samples under the different numbers of clusters. When the sum of the squared errors of samples and the number of clusters reach the best balance point, the obtained number of clusters is the optimal number of clusters for the samples. The calculation formula for the sum of the squared errors of samples is shown in Equation (6).
In Equation (6), represents the sum of the squared errors of samples, is the number of clusters, is the samples of the i-th cluster, and is the mean of the samples of the i-th cluster.
Figure 2a shows the quantitative relationship curve between the sum of the squared errors of samples
and the number of clusters
. As can be seen from
Figure 2a, when the number of clusters
is 4, the sum of the squared errors of the samples
and the number of clusters
are at the best balance point.
Figure 2b shows the clustering results of similar-day data. As can be seen from
Figure 2b, using the clustering strategy described in this section can effectively cluster the similar-day data into four clusters. The number of similar-day samples in each clustered sample set is 78, 86, 110, and 86, respectively (after removing some abnormal data, the complete number of daily data is 360).
4. Evaluation Indicators of Interval Forecasting Performance
4.1. Performance Evaluation Indicators of Interval Forecast
Probabilistic WPF aims to produce uncertainty bounds that optimally balance coverage reliability (encompassing maximal observed values) and interval sharpness (minimized bandwidth). Performance quantification relies on three statistical benchmarks: prediction interval coverage probability (PICP) for reliability assessment, normalized average width (PINAW) for sharpness evaluation, and the coverage-width criterion (CWC) for hybrid optimization. This section delineates their mathematical formulations and validation framework.
(1) Prediction interval coverage probability
The PICP serves as a fundamental performance indicator in uncertainty quantification, measuring the likelihood that observed wind power outputs fall within the defined uncertainty range. Superior PICP magnitudes directly correlate with increased observational containment, signifying enhanced capability to probabilistically encapsulate operational variability. Its computational methodology is formalized in Equation (12).
Among them, N is the number of wind power prediction points; is the coverage factor. When the actual power falls within the prediction interval, , otherwise . In practical applications, the PICP value usually needs to be greater than the predefined confidence level.
(2) Prediction interval normalized average width
If we simply pursue the PICP, it may lead to excessive bandwidth of the prediction interval, thereby losing practical value. For this reason, the index of the PINAW is introduced to measure the bandwidth of the prediction interval. The calculation formula of the PINAW is shown in Equation (13).
In Equation (13), is the upper bound of the interval, is the lower bound of the interval, R is the variation range of the target value and is used for normalizing the average bandwidth.
(3) Coverage width criterion
PICP and PINAW are opposing metrics in interval forecasting. Increasing PICP typically leads to a rise in PINAW, while reducing PINAW results in a decrease in PICP. To provide a more balanced assessment of the prediction interval’s performance, both PICP and PINAW are combined into the CWC evaluation metric. The formula for calculating CWC is given in Equation (14).
In Equation (14), is the preset interval confidence level, and is the penalty parameter, which is used to penalize the situation where the PICP indicator is lower than the interval confidence level.
4.2. Construction of Loss Function
The objective of wind power interval forecasting is to maximize PICP while minimizing PINAW. To achieve this, a loss function incorporating both PICP and PINAW is proposed in this paper. The loss function is presented in Equation (15).
In Equation (15), is the penalty factor and is the confidence level of the prediction interval. It can be seen from Equation (15) that when the PICP value is lower than the confidence level, the value of the loss function is large; when the PICP value is greater than or equal to the confidence level, in order to reduce the value of the loss function, the bandwidth of the prediction interval can be reduced. When Equation (15) is at the minimum value, the corresponding PICP and PINAW are the optimal values.
5. Construction of Interval Forecasting Model
5.1. Convolutional Neural Network
The CNN reduces the number of parameters and data dimensions while extracting spatial features from the input data through techniques like local connections, weight sharing, and pooling. These operations enhance the computational efficiency and analytical capabilities of the CNN. The network consists of an input layer, convolutional layer, pooling layer, fully connected layer, and output layer, as illustrated in
Figure 4.
The input layer is mainly used to obtain the input data of the CNN. The input data in this paper are the NWP data and wind power data, which are a data matrix of N × M, where N is the time series length of the data and M is the NWP feature data and wind power data at each time point.
As a core component of CNNs, the convolutional operation specializes in capturing diverse meteorological patterns and spatial relationships linking wind energy outputs with NWP information. Our architecture incorporates dual convolutional modules—the initial layer applies 16 3 × 3 kernel filters while the subsequent layer employs 32 3 × 5 dimensional matrices to analyze the combined input sources.
The pooling layer reduces the dimensionality of the input data, enhancing CNN computation speed and mitigating overfitting. Common pooling methods include max-pooling, mean-pooling, and stochastic-pooling. Given the distribution characteristics of wind power and NWP data, this study adopts the max-pooling method.
The fully connected layer links each neuron to all neurons in the preceding layer, integrating local features from the convolutional or pooling layers into global features. The output layer then generates the spatial correlation features of the wind power and NWP data extracted by the CNN.
5.2. BiGRU Calculation Principle and Model Structure
5.2.1. Calculation Principle of GRU
The GRU model, a variant of the LSTM, shares its ability to handle time series data effectively, addressing issues like vanishing and exploding gradients. Compared to LSTM, the GRU requires fewer parameters, offers faster training, and reduces overfitting, making it particularly efficient for time series forecasting. This paper employs the GRU model for day-ahead WPF. The model’s structure is shown in
Figure 5.
The GRU model is mainly composed of two parts: the update gate and the reset gate . The process of data processing implemented by the GRU model is as follows:
(1) The update gate
controls the extent to which the information from the previous moment is retained at the current moment. The larger the output value of the update gate
, the more information from the previous moment is retained. The calculation formula of the update gate
is as expressed in Equation (16).
In Equation (16), is the sigmoid function, is the weight of the update gate, is the hidden state of the previous moment, is the current moment input, and is the bias value.
(2) The reset gate
controls how much of the information from the previous moment is retained on the current moment candidate hidden state
. The larger the output value of the reset gate
, the more information from the previous moment is retained in the candidate hidden state
. The calculation formula of the reset gate
is as expressed in Equation (17).
In Equation (17), is the weight of the reset gate and is the bias value.
(3) The update of the candidate hidden state information
is as expressed in Equation (18).
In Equation (18), is the activation function, is the weight of the candidate hidden state, and is the bias value of the candidate hidden state.
(4) Calculate the current moment hidden state
based on
and
:
5.2.2. BiGRU Model Structure
The GRU model effectively captures the forward features of time series data. However, time series data are also influenced by past data, not just future values. To capture both forward and backward dependencies, the bidirectional gated recurrent unit (BiGRU) model is proposed. This model integrates both forward and backward GRU components to better analyze the relationships in time series data.
Figure 6 illustrates the structure of the BiGRU model, which consists of an input layer, a forward GRU, a backward GRU, and an output layer. The forward and backward GRUs capture information from the respective forward and backward sequences of the input data. The calculation process of the BiGRU model is detailed in Equations (20)–(22).
In Equation (22), and are the weights of the output of the forward GRU hidden layer and the output of the backward GRU hidden layer, respectively, and is the bias value of the BiGRU model.
5.3. Multi-Head Self-Attention Mechanism
The multi-head self-attention mechanism (MHSAM) generates multiple data sequences by applying different linear projections to the original data. Each projection, or “head”, captures distinct features of the data. These sequences are then concatenated and passed through another linear projection to form the final sequence.
For the input data sequence
, multiply the input data sequence by the linear transformation matrices
,
, and
, respectively to obtain the vectors
,
, and
,
, and
represents the number of heads of the MHSAM. The specific calculation process is shown in Equations (23)–(25).
Then, the attention calculation formula of the
j-th head is shown in Equation (26).
The output of the MHSAM can be calculated by Equation (27).
In Equation (27), is the output weight matrix of the MHSAM.
The model structure of the MHSAM is shown in
Figure 7.
5.4. Construction of the CNN-BiGRU-MHSAM Model
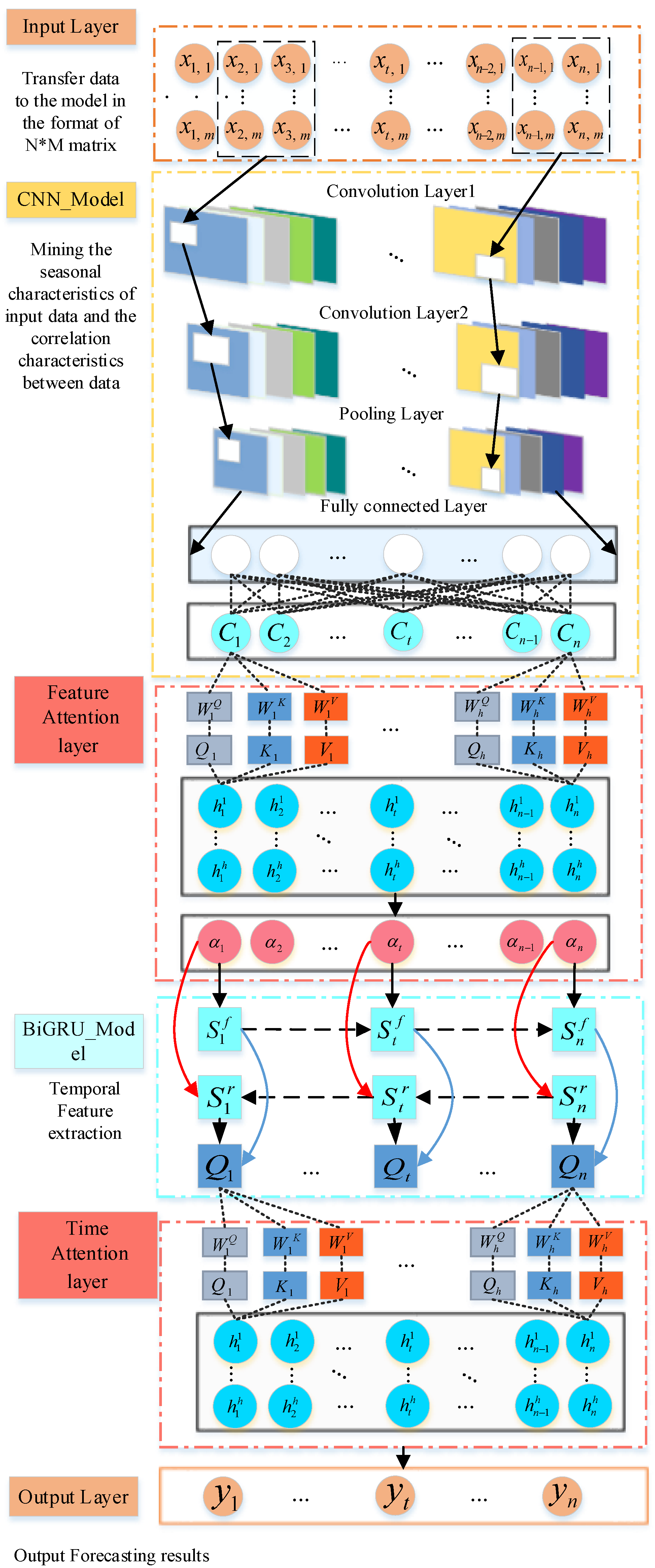
This study employs the CNN model to analyze the spatial correlations between wind power and NWP data, followed by the BiGRU model to examine the temporal dependencies within the input sequence, enabling precise characterization of the temporal distribution. Subsequently, the MHSAM assigns greater weight to the critical features that influence forecasting accuracy. The CNN-BiGRU-MHSAM model integrates these components to provide an accurate day-ahead WPF.
Figure 8 illustrates the structure of this model, with the functions of each component outlined below.
(1) Input layer
The input layer transmits the data in the training dataset to the model. The format of the input data is a matrix, where N is the length of the time sequence of the training data and M is the data features at each time point in the time sequence.
(2) CNN model
The CNN model examines the spatial distribution of the input data using the convolutional, pooling, and fully connected layers.
(3) Feature attention mechanism layer
During model training, the attention weights of features are adaptively adjusted to analyze their contributions to wind power. Features with greater influence are emphasized, while those less relevant to wind power are minimized or excluded.
(4) BiGRU model
The BiGRU model captures the temporal dependencies in the input data sequence. The forward GRU layer examines temporal correlations in the forward direction, while the backward GRU layer analyzes them in reverse order.
(5) Temporal attention mechanism layer
The temporal attention mechanism dynamically assigns attention weights to each time point in the time series, emphasizing the features most influential to wind power.
(6) Output layer
The output layer outputs the model’s forecasting results.
6. Construction of the Interval Forecasting Model
The construction of the interval forecasting model proceeds as follows:
Step 1: Data preprocessing
Remove any anomalies in the NWP and wind power data to minimize their impact on forecasting accuracy.
Step 2: Feature selection of NWP data
Based on the strategy outlined in
Section 2, select five key features from the NWP data, including wind speed at 70 m, wind direction (represented by sine and cosine), temperature, and humidity, as input for the forecasting model.
Step 3: Similar-day data clustering
According to the data-clustering strategy in
Section 2, GMM is used to cluster the NWP data and wind power data into four clusters.
Step 4: Division of training dataset and testing dataset
The NWP data and wind power data in each cluster are divided into training dataset and testing dataset. In the first cluster dataset, the data of February 2nd are selected as the testing dataset. In the second cluster dataset, the data of 13 June are selected as the testing dataset. In the third cluster dataset, the data of 29 May are selected as the testing dataset. In the fourth cluster dataset, the data of 31 August are selected as the testing dataset. The remaining data are all used as the training datasets.
Step 5: Calculate the upper and lower bounds of the WPF interval
According to the statistical distribution characteristics of wind power in each cluster dataset, calculate the upper bound value
and lower bound value
of the confidence interval of wind power at different confidence levels in each cluster dataset. According to Equation (28), the upper bound value
and lower bound value
of the wind power data point of each cluster can be obtained.
In Equation (28), is the true value of wind power in each cluster, is the average value of wind power in each cluster, is the lower bound of the confidence interval of wind power in each cluster, and is the upper bound of the confidence interval of wind power in each cluster.
Step 6: Initialize model hyperparameters
According to the value range of the model hyperparameters, randomly initialize the model hyperparameters.
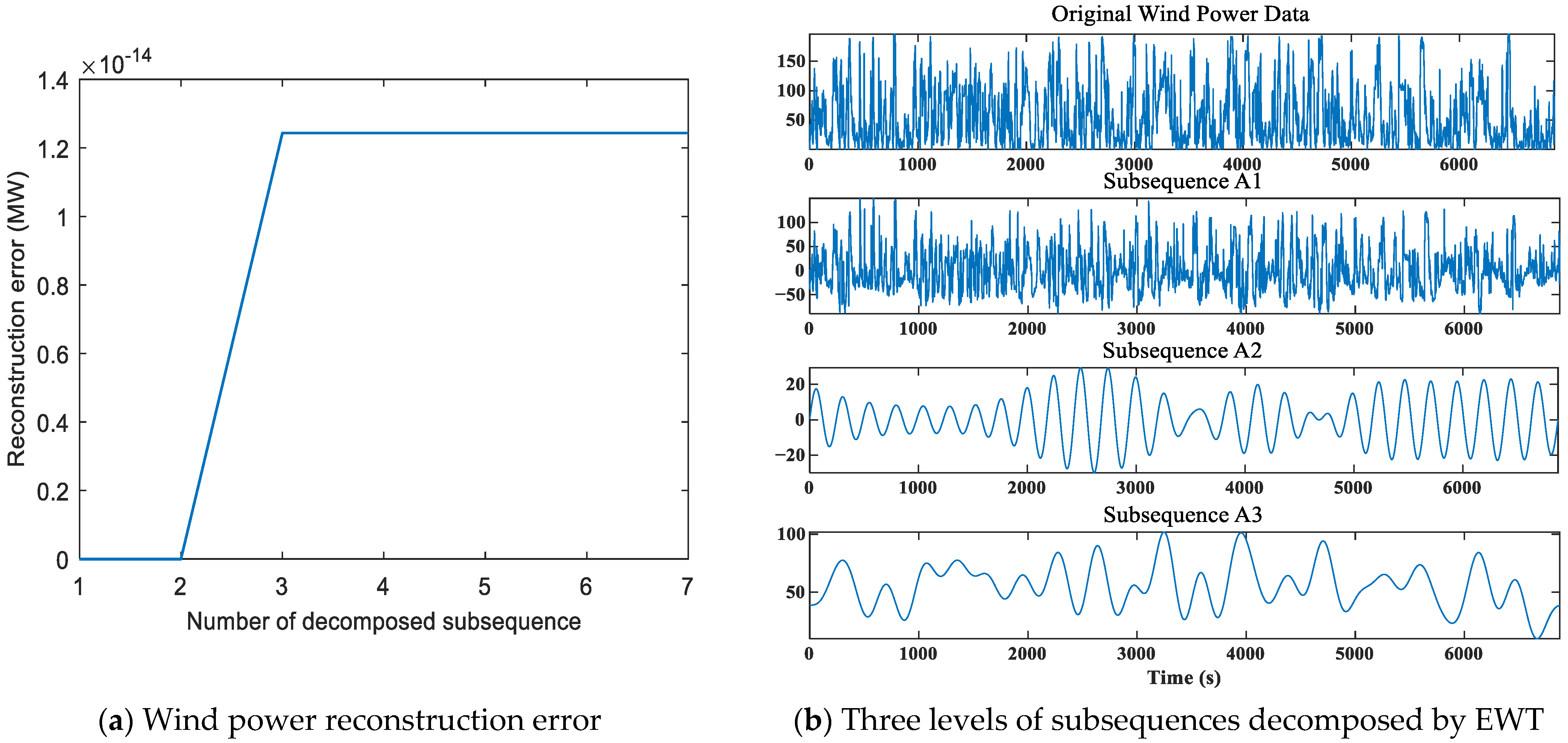
Step 7: EWT decomposition of data
According to the principle of EWT introduced in
Section 3, the NWP data and the upper and lower bound data of wind power in the training dataset and the testing dataset are decomposed by EWT to obtain subsequences of different frequencies.
Step 8: Forecasting model training
Input the subsequence data after EWT decomposition of the training dataset into the CNN-BiGRU-MHSAM forecasting model to train the forecasting model.
Step 9: Reconstruct the upper and lower bounds of the forecast interval
According to the forecasting results of each subsequence of wind power data, reconstruct the upper and lower bounds of the day-ahead wind power interval forecast.
Step 10: Calculate the loss function of the interval forecast of training dataset
According to the loss function calculation Formula (15), calculate the loss function of the interval forecasting result of the training dataset, and save the model parameters when the loss function is the smallest.
Step 11: Adjustment of forecasting model hyperparameters
According to the convergence condition of the forecasting model, judge whether the training process meets the convergence condition. If the convergence condition is not met, then use the grid method to adjust the model hyperparameters, and then jump to Step 8 to continue execution; if the convergence condition is met, then execute Step 12.
Step 12: Testing of the forecasting Model
Use the testing dataset after EWT decomposition to test the trained model and calculate the evaluation indicators of the interval forecasting results of the testing dataset.
The construction of the entire interval forecasting model is shown in
Figure 9.
8. Conclusions
In this paper, a day-ahead wind power interval forecasting model based on GMM-FS-EWT-CNN-BiGRU-MHSAM is proposed. This model uses the FS to select the key features that affect the forecasting accuracy of wind power, and uses the GMM to cluster the data with similar meteorological features into one cluster. On this basis, the EWT is used to decompose the NWP data and wind power data into frequency data with time information to extract the high-frequency components in the data. The GMM-FS-EWT-CNN-BiGRU-MHSAM forecasting model is constructed by integrating the CNN, BiGRU, and MHSAM. The calculation results show the following:
(1) Performing feature selection on NWP data and then clustering NWP data and wind power data using the GMM model can effectively improve the forecasting accuracy of day-ahead wind power.
(2) The use of empirical wavelet transform to decompose NWP and wind power data into frequency components with time information allows for the extraction of high-frequency data, which enhances the forecasting accuracy.
(3) A CNN is used to extract spatial correlations and meteorological features, while the BiGRU model captures temporal dependencies within the data sequence. A MHSAM is incorporated to assign greater weight to the most influential elements.
(4) The GMM-FS-EWT-CNN-BiGRU-MHSAM model reduces interval width while maintaining the coverage rate of the forecasting intervals, and the examples demonstrate that the method proposed in this paper has good forecasting performance.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}