
Optimizing UAV Spraying for Sustainability: Different System Spray Drift Control and Adjuvant Performance



Abstract
1. Introduction
- Adjusting the positioning, quantity, and type of nozzles;
- Operational settings (flight speed, altitude);
- Tank-mix adjuvants.
- (i)
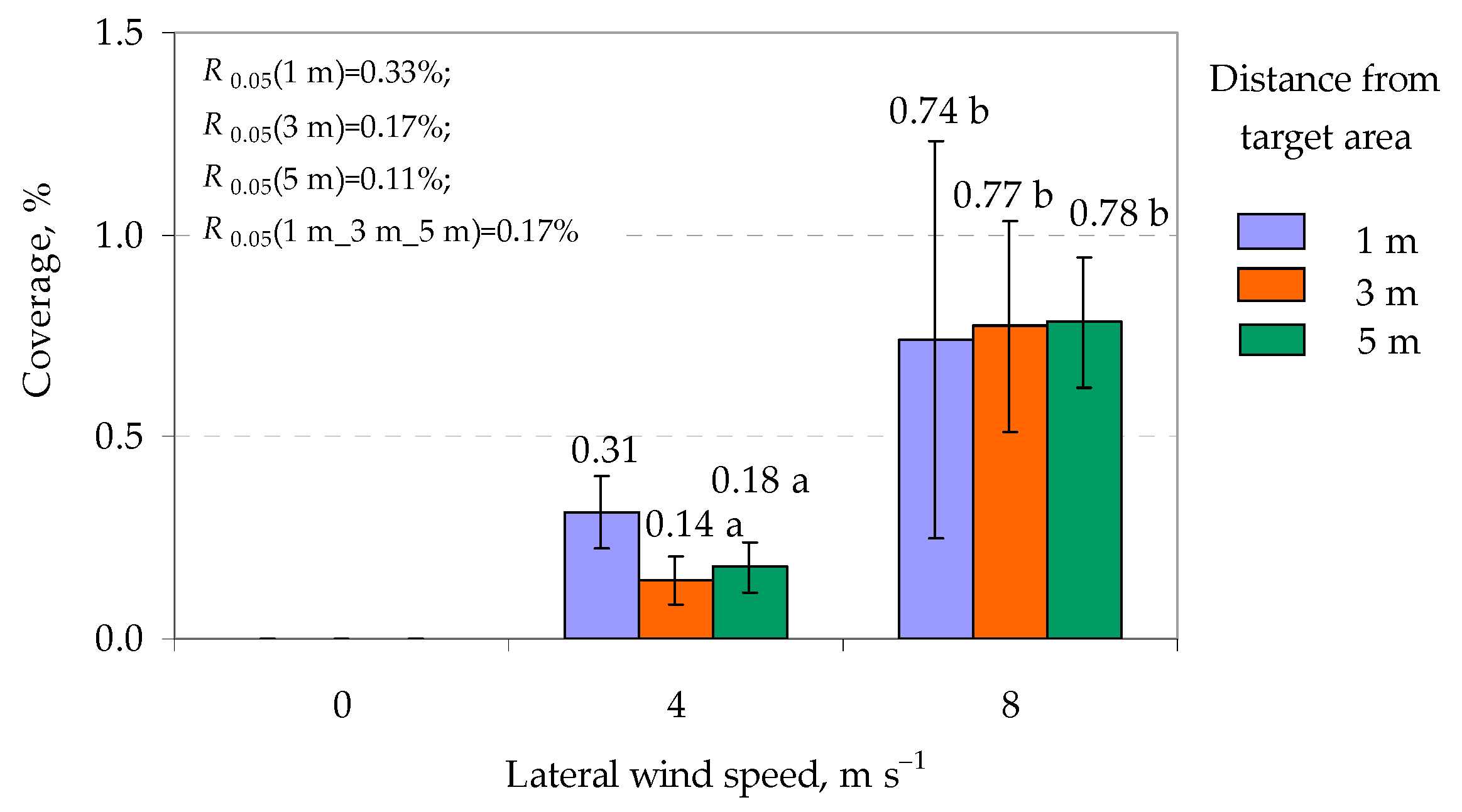
- To determine the effect of lateral wind on the spray drift of droplets generated by different UAV-based spray systems at different lateral wind velocities;
- (ii)
- To assess the impact of four different tank-mix adjuvants on UAV spraying effectiveness and optimize their concentrations for UAV application under semi-controlled conditions.
2. Materials and Methods
2.1. Meteorological Conditions and Location
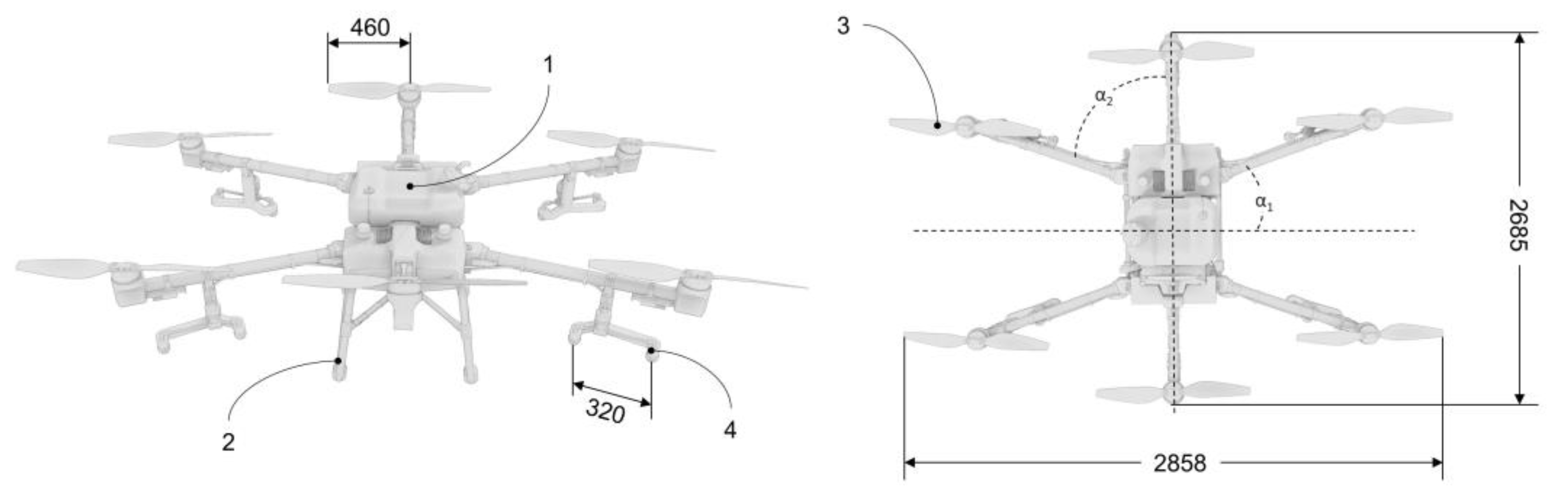
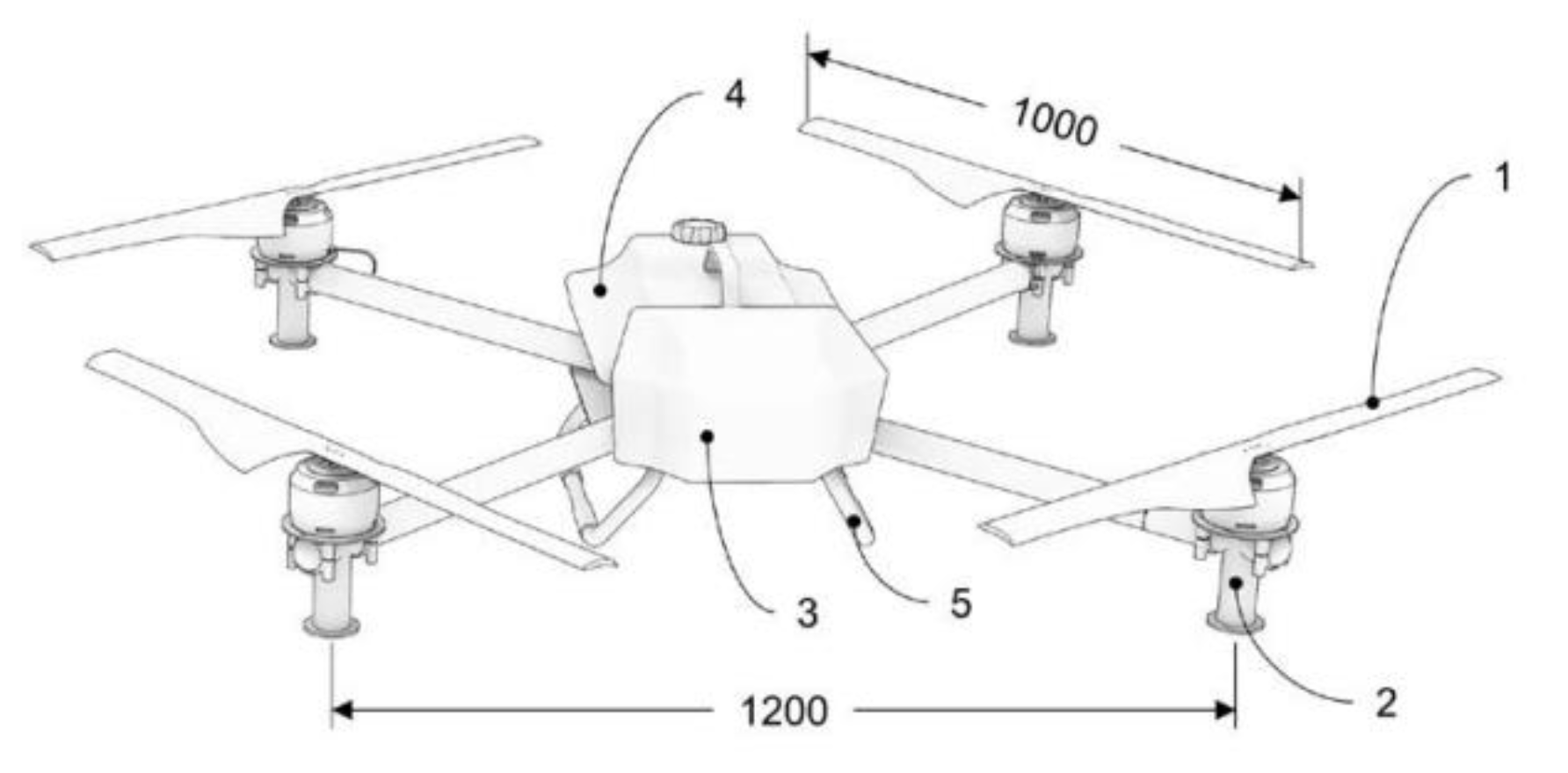
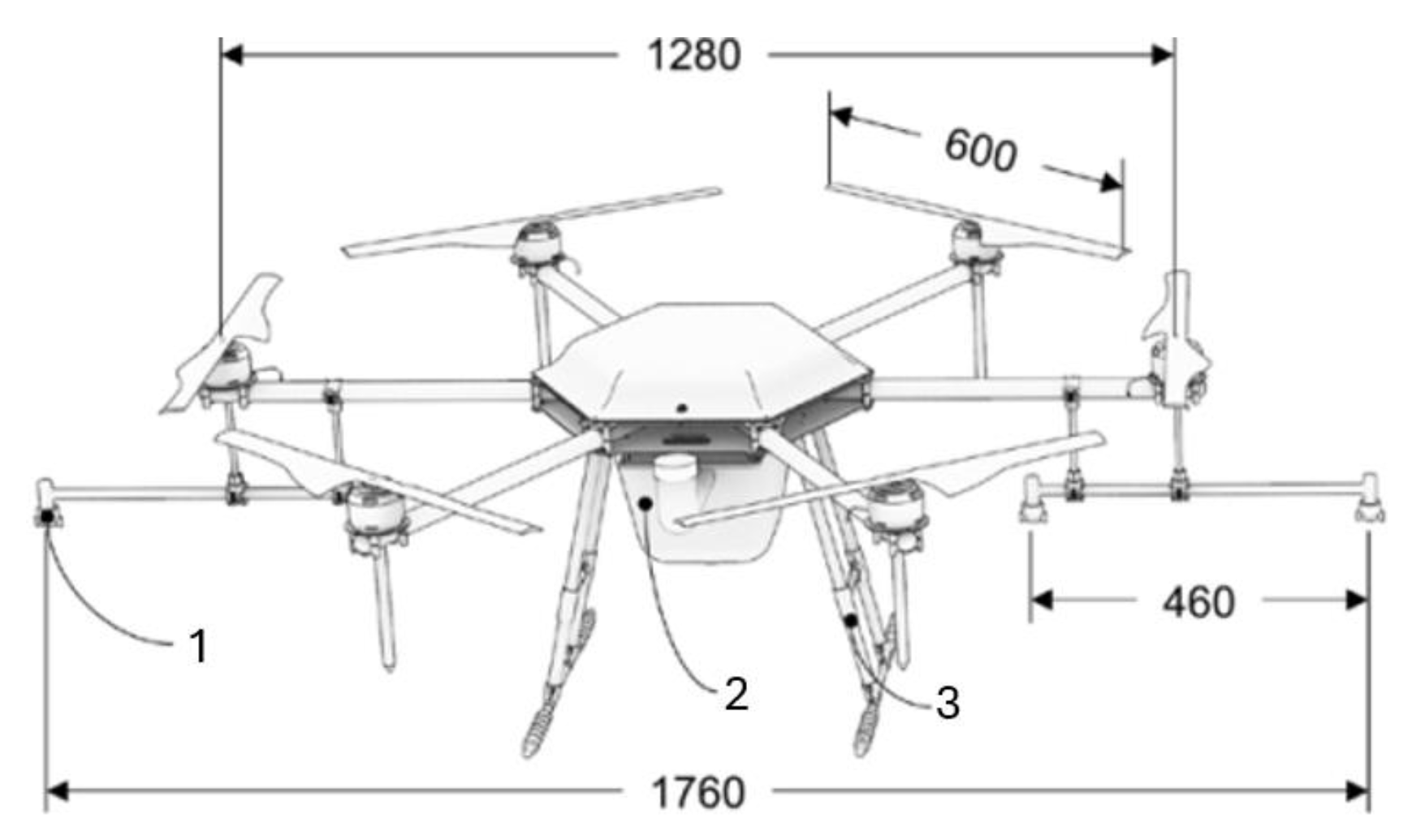
2.2. UAVs Used for Spraying Performance Trials
2.3. DRAs Used for Spraying Trials
2.4. UAV Spraying Performance Comparison Trial and DRA Effectiveness Trial Setup
2.5. Methodology for Results Analysis
- ΣDd—drift deposition gathered from all drift WSP in a single trial;
- ΣTd—all deposition gathered from all WSP in a single trial;
- Pp—drift-prone droplet percentage from all WSP, considering droplets of finer diameter than 150 μm are prone to drift;
- m—total number of WSP that gathered any deposition during trial;
- n—total number of trials performed with a concentration of DRA.
- ΣDd water—drift deposition gathered from all drift WSP in control trials;
- ΣDd DRA—drift deposition gathered from all drift WSP in respective DRA modified solution trials;
- ΣTd water—all deposition gathered from all WSP in control trials;
- ΣTd DRA—all deposition gathered from all WSP in respective DRA modified solution trials.
3. Results
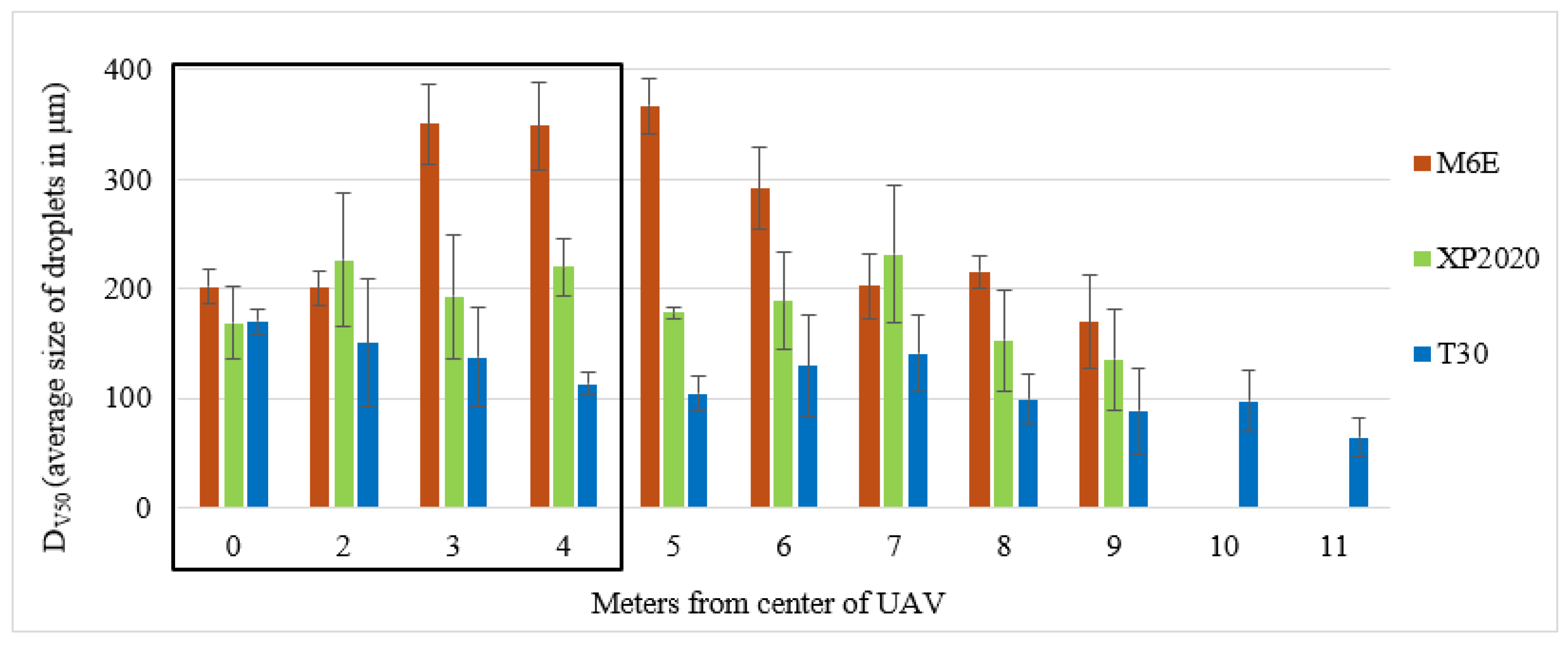
3.1. UAV Spraying Performance Comparison Trials
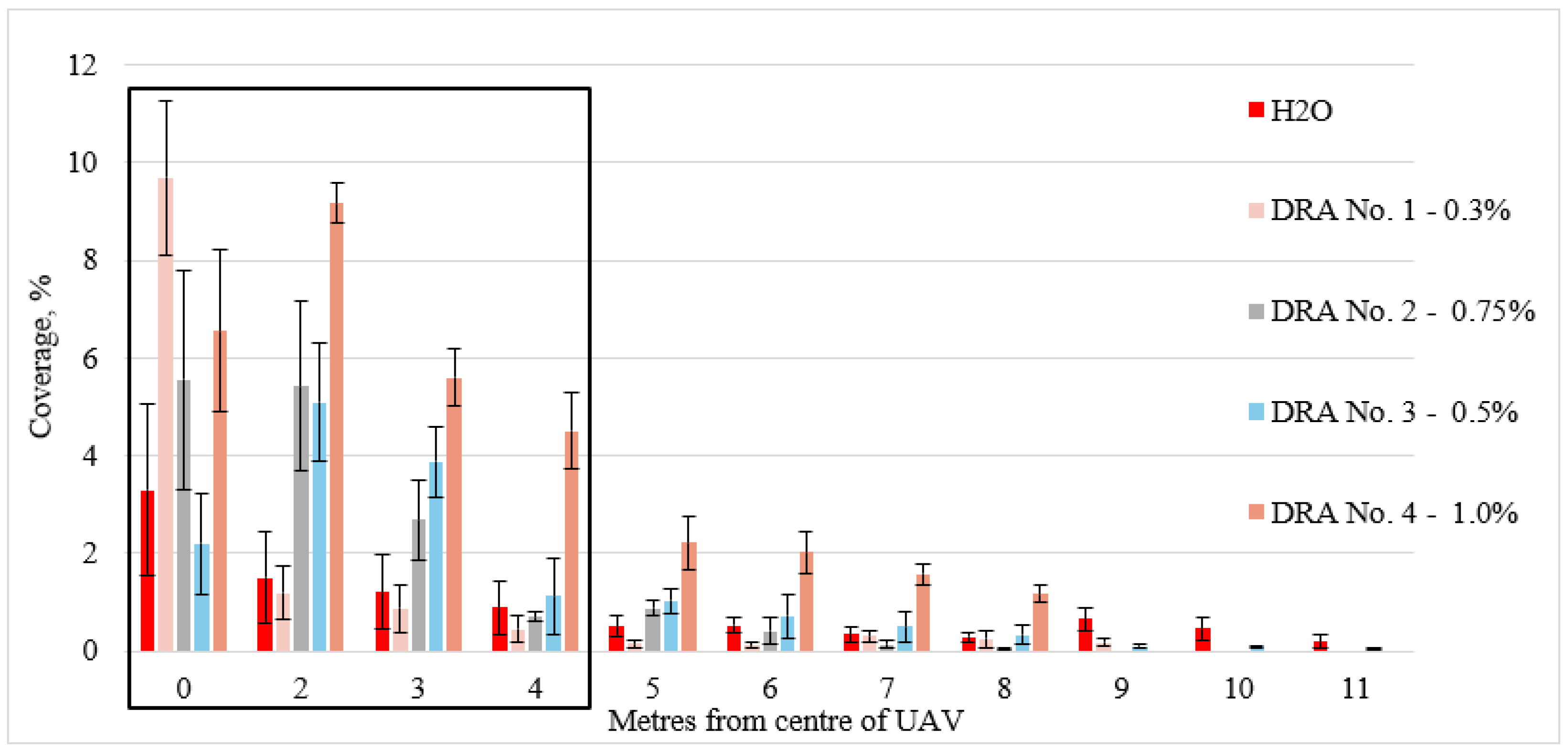
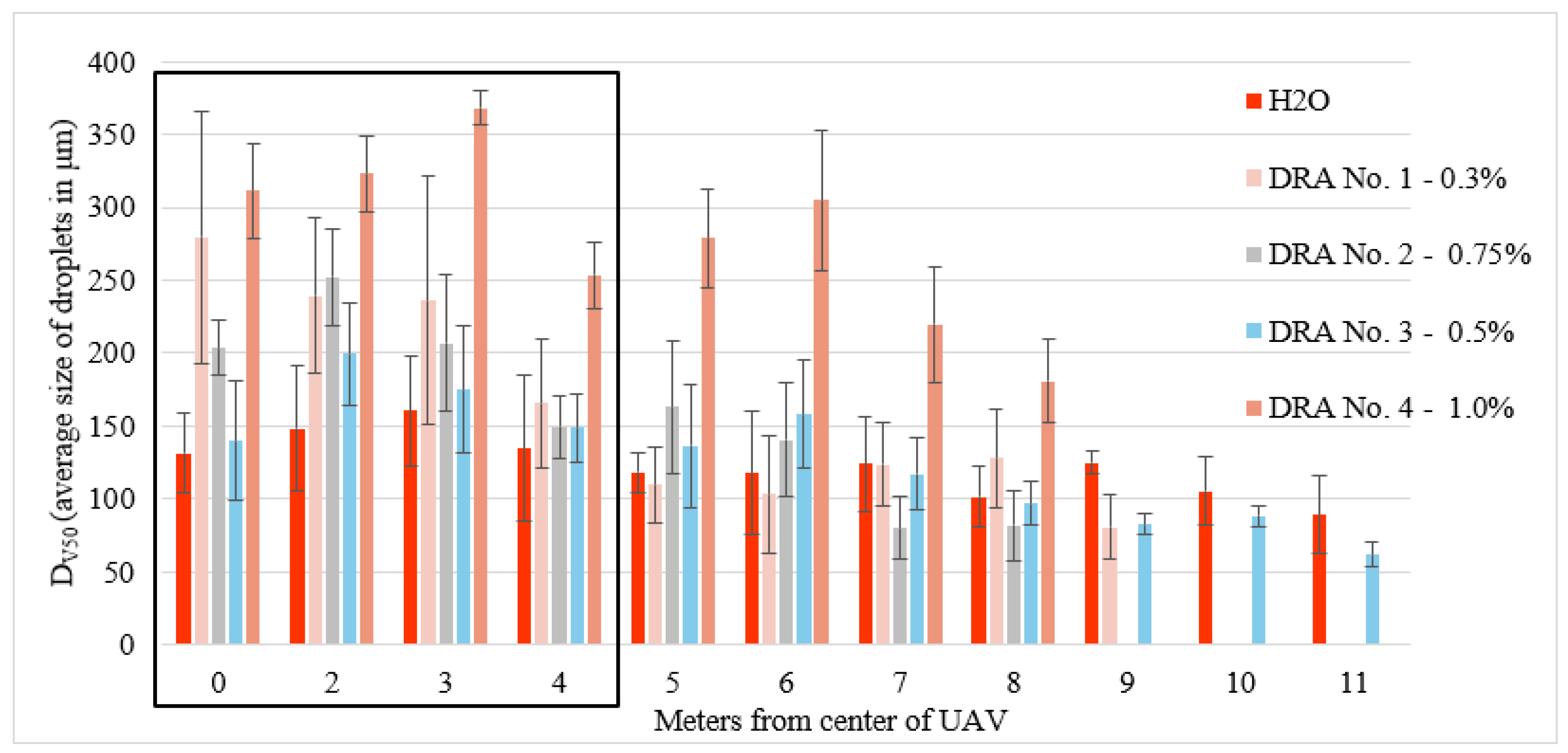
3.2. DRA Effectiveness Trials
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maggi, F.; Tang, F.H.M.; Tubiello, F.N. Agricultural pesticide land budget and river discharge to oceans. Nature 2023, 620, 1013–1017. [Google Scholar] [CrossRef]
- Seo, Y.; Umeda, S.; Yoshikawa, N. Environmental impact of agricultural sprayers used in Japanese rice farming. Int. J. Agric. Sustain. 2023, 21, 2247803. [Google Scholar] [CrossRef]
- Kannan, N.; Huggins, C. Opportunities to mitigate particle drift from ground-based preemergent herbicide applications. Appl. Eng. Agric. 2023, 39, 33–42. [Google Scholar] [CrossRef]
- Esayas, T.; Mekbib, F.; Shimelis, H.; Mwadzingeni, L. Assessing off-target drift and on-target deposition uniformity of a backpack magnetic sprayer in a sugarcane plantation. Am. J. Agric. Biomed. Eng. 2023, 5, 1–4. [Google Scholar]
- Lochan, K.; Khan, A.; Elsayed, I.; Suthar, B.; Seneviratne, L.; Hussain, I. Advancements in Precision Spraying of Agricultural Robots: A Comprehensive Review. IEEE Access 2024, 12, 129447–129483. [Google Scholar] [CrossRef]
- Cech, R.; Zaller, J.G.; Lyssimachou, A.; Clausing, P.; Hertoge, K.; Linhart, C. Pesticide drift mitigation measures appear to reduce contamination of non-agricultural areas, but hazards to humans and the environment remain. Sci. Total Environ. 2023, 854, 158814. [Google Scholar] [CrossRef] [PubMed]
- Boonupara, T.; Udomkun, P.; Khan, E.; Kajitvichyanukul, P. Airborne pesticides from agricultural practices: A critical review of pathways, influencing factors, and human health implications. Toxics 2023, 11, 858. [Google Scholar] [CrossRef]
- Ahmad, F.; Khaliq, A.; Qiu, B.; Sultan, M.; Ma, J. Advancements of Spraying Technology in Agriculture; IntechOpen: London, UK, 2021. [Google Scholar] [CrossRef]
- Hafeez, A.; Husain, M.A.; Singh, S.P.; Chauhan, A.; Khan, M.T.; Kumar, N.; Chauhan, A.; Soni, S.K. Implementation of drone technology for farm monitoring and pesticide spraying: A review. Inf. Process. Agric. 2023, 10, 192–203. [Google Scholar] [CrossRef]
- Ozkan, E. Drones for Spraying Pesticides—Opportunities and Challenges; The Ohio State University: Columbus, OH, USA, 2024; pp. 1–16. [Google Scholar]
- Richardson, B.; Rolando, C.A.; Kimberley, M.O. Quantifying spray deposition from a UAV configured for spot spray applications to individual plants. Trans. ASABE 2020, 63, 1049–1058. [Google Scholar] [CrossRef]
- Zhang, R.; Hewitt, A.J.; Chen, L.; Li, L.; Tang, Q. Challenges and opportunities of unmanned aerial vehicles as a new tool for crop pest control. Pest Manag. Sci. 2023, 79, 4123–4131. [Google Scholar] [CrossRef] [PubMed]
- Kim, C.J.; Yuan, X.; Kim, M.; Kyung, K.S.; Noh, H.H. Monitoring and risk analysis of residual pesticides drifted by unmanned aerial spraying. Sci. Rep. 2023, 13, 10834. [Google Scholar] [CrossRef] [PubMed]
- Martin, D.E.; Tang, Z.; Yang, Y.; Latheef, M.A.; Fritz, B.K.; Kruger, G.R.; Houston, T.W. Spray Drift Characterization of a Remotely Piloted Aerial Application System. Appl. Eng. Agric. 2024, 40, 385–399. [Google Scholar] [CrossRef]
- Qin, W.; Chen, P. Current Research on Deposition and Drift of Droplets Sprayed by Plant Protection UAV. Res. Sq. 2023. [Google Scholar]
- Wang, J.; Lv, X.; Wang, B.; Lan, X.; Yan, Y.; Chen, S.; Lan, Y. Numerical simulation and analysis of droplet drift motion under different wind speed environments of single-rotor plant protection UAVs. Drones 2023, 7, 128. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Zhou, Z.; Ouyang, F.; Wang, G.; Huang, X.; Deng, X.; Cheng, S. Effect of droplet size parameters on droplet deposition and drift of aerial spraying by using plant protection UAV. Agronomy 2020, 10, 195. [Google Scholar] [CrossRef]
- Tang, Y.; Fu, Y.; Guo, Q.; Huang, H.; Tan, Z.; Luo, S. Numerical simulation of the spatial and temporal distributions of the downwash airflow and spray field of a co-axial eight-rotor plant protection UAV in hover. Comput. Electron. Agric. 2023, 206, 107634. [Google Scholar] [CrossRef]
- Guo, Q.; Zhu, Y.; Tang, Y.; Hou, C.; He, Y.; Zhuang, J.; Zheng, Y.; Luo, S. CFD simulation and experimental verification of the spatial and temporal distributions of the downwash airflow of a quad-rotor agricultural UAV in hover. Comput. Electron. Agric. 2020, 172, 105343. [Google Scholar] [CrossRef]
- Zhan, Y.; Chen, P.; Xu, W.; Chen, S.; Han, Y.; Lan, Y.; Wang, G. Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution. Biosyst. Eng. 2022, 216, 32–45. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Z.; Hu, L.; Zang, Y.; Xu, S.; Liu, A.; Luo, X.; Zhang, T. Optimization of operation parameters for supplementary pollination in hybrid rice breeding using round multi-axis multi-rotor electric unmanned helicopter. Trans. Chin. Soc. Agric. Eng. 2014, 30, 1–9. [Google Scholar]
- Al Heidary, M.; Douzals, J.P.; Sinfort, C.; Vallet, A. Influence of spray characteristics on potential spray drift of field crop sprayers: A literature review. Crop Prot. 2014, 63, 120–130. [Google Scholar] [CrossRef]
- Dafsari, R.A.; Yu, S.; Yu, S.; Choi, Y.; Lee, J. Drift potential and coverage ratio analysis of an air induction nozzle under an agricultural drone with various operating conditions; an indoor test. Comput. Electron. Agric. 2024, 224, 109171. [Google Scholar] [CrossRef]
- Liu, Z.; Li, J. Application of unmanned aerial vehicles in precision agriculture. Agriculture 2023, 13, 1375. [Google Scholar] [CrossRef]
- Meng, Y.; Wu, Q.; Zhou, H.; Hu, H. How tank-mix adjuvant type and concentration influence the contact angle on wheat leaf surface. PeerJ 2023, 11, e16464. [Google Scholar] [CrossRef] [PubMed]
- Song, J.L.; He, X.K.; Yang, X.L. Influence of nozzle orientation on spray deposits. Trans. CSAE 2006, 22, 96–99. [Google Scholar]
- Wongsuk, S.; Zhu, Z.; Zheng, A.; Qi, P.; Li, Y.; Huang, Z.; He, X. Assessing the potential spray drift of a six-rotor unmanned aerial vehicle sprayer using a test bench and airborne drift collectors under low wind velocities: Impact of atomization characteristics and application parameters. Pest Manag. Sci. 2024, 80, 6053–6067. [Google Scholar] [CrossRef]
- Weicai, Q.; Panyang, C. Analysis of the research progress on the deposition and drift of spray droplets by plant protection UAVs. Sci. Rep. 2023, 13, 14935. [Google Scholar] [CrossRef] [PubMed]
- Qing, T.; Ruirui, Z.; Liping, C.; Min, X.; Tongchuan, Y.; Bin, Z. Droplets movement and deposition of an eight-rotor agricultural UAV in downwash flow field. Int. J. Agric. Biol. Eng. 2017, 10, 47–56. [Google Scholar]
- Gong, J.; Fan, W.; Peng, J. Application analysis of hydraulic nozzle and rotary atomization sprayer on plant protection UAV. Int. J. Precis. Agric. Aviat. 2019, 2, 26–30. [Google Scholar] [CrossRef]
- Aminjan, K.K.; Sedaghat, M.; Heidari, M.; Khashehchi, M.; Mohammadzadeh, K.; Salahinezhad, M.; Bina, R. Numerical investigation of the impact of fuel temperature on spray characteristics in a pressure-swirl atomizer with spiral path. Exp. Comput. Multiph. Flow 2024, 6, 428–445. [Google Scholar] [CrossRef]
- Zhang, H.; Wen, S.; Chen, C.; Liu, Q.; Xu, T.; Chen, S.; Lan, Y. Downwash airflow field distribution characteristics and their effect on the spray field distribution of the DJI T30 six-rotor plant protection UAV. Int. J. Agric. Biol. Eng. 2023, 16, 10–22. [Google Scholar] [CrossRef]
- Zeeshan, M.; Li, H.; Yousaf, G.; Ren, H.; Liu, Y.; Arshad, M.; Han, X. Effect of formulations and adjuvants on the properties of acetamiprid solution and droplet deposition characteristics sprayed by UAV. Front. Plant Sci. 2024, 15, 1441193. [Google Scholar] [CrossRef] [PubMed]
- Idziak, R.; Sobczak, A.; Waligora, H.; Szulc, P. Impact of multifunctional adjuvants on efficacy of sulfonylurea herbicide applied in maize (Zea mays L.). Plants 2023, 12, 1118. [Google Scholar] [CrossRef] [PubMed]
- Hewitt, A.J. Adjuvant use for the management of pesticide drift, leaching and runoff. Pest Manag. Sci. 2024, 80, 4819–4827. [Google Scholar] [CrossRef]
- Meng, Y.; Zhong, W.; Liu, C.; Su, J.; Su, J.; Lan, Y.; Wang, M. UAV spraying on citrus crop: Impact of tank-mix adjuvant on the contact angle and droplet distribution. PeerJ 2022, 10, e13064. [Google Scholar] [CrossRef]
- Zhang, S.; Huang, M.; Zhou, Q.; Jiao, Y.; Sun, H.; Cheng, X.; Xue, X. Study on Effects of Different Concentration Adjuvants on the Properties of Prochloraz Emulsion in Water Solution Droplets and Deposition. Agronomy 2023, 13, 2635. [Google Scholar] [CrossRef]
- Meng, Y.; Lan, Y.; Mei, G.; Guo, Y.; Song, J.; Wang, Z. Effect of aerial spray adjuvant applying on the efficiency of small unmanned aerial vehicle for wheat aphids control. Int. J. Agric. Biol. Eng. 2018, 11, 46–53. [Google Scholar] [CrossRef]
- Liu, Q.; Shan, C.; Zhang, H.; Song, C.; Lan, Y. Evaluation of liquid atomization and spray drift reduction of hydraulic nozzles with four spray Adjuvant Solutions. Agriculture 2023, 13, 236. [Google Scholar] [CrossRef]
- Bauša, L.; Steponavičius, D.; Jotautienė, E.; Kemzūraitė, A.; Zaleckas, E. Application of rape pod sealants to reduce adverse environmental impacts. J. Sci. Food Agric. 2018, 98, 2428–2436. [Google Scholar] [CrossRef] [PubMed]
- Sobiech, Ł.; Grzanka, M.; Skrzypczak, G.; Idziak, R.; Włodarczak, S.; Ochowiak, M. Effect of adjuvants and pH adjuster on the efficacy of sulcotrione herbicide. Agronomy 2020, 10, 530. [Google Scholar] [CrossRef]
- Wu, X.; Zhai, C.; Zheng, Y.; Chen, A.; Yu, X.; Xu, J.; Sun, Y.; Cong, Y.; Tang, W.; Liu, X. Effect of different salt ions with different concentrations on the stability of carbon dioxide-in-water foam fracturing fluids. J. Mol. Liq. 2023, 373, 121215. [Google Scholar] [CrossRef]
- Butts, T.R.; Fritz, B.K.; Davis, J.A.; Spurlock, T.N. Spray coverage and deposits from a remotely piloted aerial application system using various nozzle types. Front. Agron. 2024, 6, 1493799. [Google Scholar] [CrossRef]
- Li, B.X.; Liu, Y.; Zhang, P.; Li, X.X.; Pang, X.Y.; Zhao, Y.H.; Li, H.; Liu, F.; Lin, J.; Mu, W. Selection of organosilicone surfactants for tank-mixed pesticides considering the balance between synergistic effects on pests and environmental risks. Chemosphere 2019, 217, 591–598. [Google Scholar] [CrossRef]
- Lu, Z.; Gao, Y.; Zhang, C.; Bao, Z.; Wang, W.; Lin, J.; Du, F. Surface properties of Tetranychus urticae Koch (Acari: Tetranychidae) and the effect of their infestation on the surface properties of kidney bean (Phaseolus vulgaris L.) hosts. Pest Manag. Sci. 2021, 77, 5120–5128. [Google Scholar] [CrossRef]
- Liu, Z.; Xue, W.; Shi, J.; Han, S.; Yan, J. Recent advances in polyalkylene glycol base oil. Res. Chem. Intermed. 2024, 50, 1515–1539. [Google Scholar] [CrossRef]
- Meng, Y.; Wang, M.; Wang, Z.; Hu, H.; Ma, Y. Surface tension and spreading coefficient of single-and mix-pesticide solutions with aerial spraying organosilicone adjuvant. Int. J. Precis. Agric. Aviat. 2021, 4, 6–13. [Google Scholar] [CrossRef]
- Ge, G.; Liu, J.; Liao, Y.; Zeng, D.; Mou, H.; Fan, H. Effects of surfactants on the wettability of sodium propionate aqueous deacidification agent. Nord. Pulp Pap. Res. J. 2024, 39, 645–654. [Google Scholar] [CrossRef]
- Langlet, R.; Valentin, R.; Morard, M.; Raynaud, C.D. Transitioning to Microplastic-Free Seed Coatings: Challenges and Solutions. Polymers 2024, 16, 1969. [Google Scholar] [CrossRef]
- Soriano-Jerez, Y.; Gourlaouen, E.; Zeriouh, O.; del Carmen Cerón-García, M.; Arrabal-Campos, F.M.; Ruiz-Martínez, C.; Fernández, I.; Gallardo-Rodríguez, J.J.; García-Camacho, F.; Molina-Grima, E.; et al. Role of dynamic surface tension of silicone polyether surfactant-based silicone coatings on protein adsorption: An insight on the ‘ambiguous’ interfacial properties of Fouling Release Coatings. Prog. Org. Coat. 2024, 186, 108079. [Google Scholar] [CrossRef]
- Jomantas, T.; Lekavičienė, K.; Steponavičius, D.; Andriušis, A.; Zaleckas, E.; Zinkevičius, R.; Popescu, C.V.; Salceanu, C.; Ignatavičius, J.; Kemzūraitė, A. The influence of newly developed spray drift reduction agents on drift mitigation by means of wind tunnel and field evaluation methods. Agriculture 2023, 13, 349. [Google Scholar] [CrossRef]
- Ahmad, F.; Zhang, S.; Qiu, B.; Ma, J.; Xin, H.; Qiu, W.; Ahmed, S.; Chandio, F.A.; Khaliq, A. Comparison of water sensitive paper and glass strip sampling approaches to access spray deposit by UAV sprayers. Agronomy 2022, 12, 1302. [Google Scholar] [CrossRef]
- Gogolák, L.; Simon, J.; Pletikosity, Á.; Fürstner, I. Quantitative Assessment of UAV Assisted Particle Spraying Distribution in Agriculture: An Image Analysis Approach Using Water-Sensitive Papers. Int. J. Electr. Comput. Eng. Syst. 2024, 15, 553–562. [Google Scholar] [CrossRef]
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Li, H.; Zhu, H.; Jiang, Z.; Lan, Y. Performance characterization on downwash flow and spray drift of multirotor unmanned agricultural aircraft system based on CFD. Int. J. Agric. Biol. Eng. 2022, 15, 1–8. [Google Scholar] [CrossRef]
- Biglia, A.; Grella, M.; Bloise, N.; Comba, L.; Mozzanini, E.; Sopegno, A.; Pittarello, M.; Dicembrini, E.; Alcatrão, L.E.; Guglieri, G.; et al. UAV-spray application in vineyards: Flight modes and spray system adjustment effects on canopy deposit, coverage, and off-target losses. Sci. Total Environ. 2022, 845, 157292. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, S.; Wang, G.; Lan, Y. Drift evaluation of a quadrotor unmanned aerial vehicle (UAV) sprayer: Effect of liquid pressure and wind speed on drift potential based on wind tunnel test. Appl. Sci. 2021, 11, 7258. [Google Scholar] [CrossRef]
- Wang, G.; Han, Y.; Li, X.; Andaloro, J.; Chen, P.; Hoffmann, W.C.; Han, X.; Chen, S.; Lan, Y. Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer. Sci. Total Environ. 2020, 737, 139793. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Dou, Z.; Ma, Y.; Pan, L.; Ren, H.; Wang, X.; Ma, C.; Han, X. Effects of Nozzle Types and Spraying Volume on the Control of Hypera postica Gyllenhal by Using an Unmanned Aerial Vehicle. Agronomy 2023, 13, 2287. [Google Scholar] [CrossRef]
- Koo, D.; Gonҫalves, C.G.; Askew, S.D. Agricultural spray drone deposition, Part 2: Operational height and nozzle influence pattern uniformity, drift, and weed control. Weed Sci. 2024, 72, 824–832. [Google Scholar] [CrossRef]
- Guo, S.; Yao, W.; Xu, T.; Ma, H.; Sun, M.; Chen, C.; Lan, Y. Assessing the application of spot spray in Nanguo pear orchards: Effect of nozzle type, spray volume rate and adjuvant. Pest Manag. Sci. 2022, 78, 3564–3575. [Google Scholar] [CrossRef] [PubMed]
- Hanif, A.S.; Han, X.; Yu, S.H. Independent control spraying system for UAV-based precise variable sprayer: A review. Drones 2022, 6, 383. [Google Scholar] [CrossRef]
- Wang, X.; He, X.; Song, J.; Wang, Z.; Wang, C.; Wang, S.; Wang, S.; Wu, R.; Meng, Y. Drift potential of UAV with adjuvants in aerial applications. Int. J. Agric. Biol. Eng. 2018, 11, 54–58. [Google Scholar] [CrossRef]
- Makhnenko, I.; Alonzi, E.R.; Fredericks, S.A.; Colby, C.M.; Dutcher, C.S. A review of liquid sheet breakup: Perspectives from agricultural sprays. J. Aerosol Sci. 2021, 157, 105805. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| % in H2O | 0.1 | 0.2 | 0.3 | 0.35 | 0.4 | 0.5 | 0.6 | 0.7 | 0.75 | 0.8 | 0.9 | 1.0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DRA | |||||||||||||
| No. 1 | 34.1 | 32.0 | 31.6 | 31.5 | 31.4 | 31.1 | 30.7 | 30.4 | 30.2 | 30.1 | 29.8 | 29.6 | |
| No. 2 | 23.1 | 21.8 | 21.7 | 21.4 | 21.2 | 21.2 | 21.1 | 21.0 | 21.0 | 20.5 | 20.3 | 20.2 | |
| No. 3 | 24.0 | 23.3 | 23.2 | 23.1 | 23.0 | 23.0 | 22.9 | 22.8 | 22.7 | 22.7 | 22.5 | 22.4 | |
| No. 4 | 26.4 | 22.9 | 22.7 | 22.5 | 21.3 | 21.2 | 21.2 | 21.0 | 20.7 | 20.5 | 20.4 | 20.3 | |
| % in H2O | 0.1 | 0.2 | 0.3 | 0.35 | 0.4 | 0.5 | 0.6 | 0.7 | 0.75 | 0.8 | 0.9 | 1.0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DRA | |||||||||||||
| No. 1 | 64.8 | 64.2 | 63.6 | 58.3 | 52.8 | 52.2 | 51.0 | 50.5 | 49.7 | 48.2 | 47.6 | 46.1 | |
| No. 2 | 65.2 | 61.4 | 59.1 | 57.9 | 57.2 | 56.7 | 53.6 | 51.0 | 50.8 | 49.3 | 48.3 | 46.0 | |
| No. 3 | 75.4 | 66.7 | 63.9 | 59.2 | 59.0 | 56.9 | 56.1 | 54.3 | 53.5 | 50.8 | 44.9 | 44.0 | |
| No. 4 | 80.7 | 79.0 | 78.5 | 78.1 | 75.8 | 75.6 | 75.5 | 75.2 | 73.7 | 65.4 | 58.2 | 52.1 | |
| % in H2O | 0.1 | 0.2 | 0.3 | 0.35 | 0.4 | 0.50 | 0.6 | 0.7 | 0.75 | 0.8 | 0.9 | 1.0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DRA | |||||||||||||
| No. 1 | 13.3 | 14.1 | 14.5 | 14.7 | 15.1 | 15.4 | 15.6 | 15.9 | 16.2 | 16.6 | 17.0 | 17.1 | |
| No. 2 | 28.3 | 30.8 | 32.6 | 38.1 | 40.5 | 41.7 | 43.6 | 54.2 | 55.3 | 65.6 | 67.1 | 81.4 | |
| No. 3 | 38.6 | 39.2 | 40.1 | 40.3 | 41.2 | 42.1 | 42.6 | 43.4 | 45.7 | 51.1 | 54.5 | 59.3 | |
| No. 4 | 45.3 | 46.5 | 47.2 | 47.6 | 48.4 | 52.3 | 54.3 | 57.8 | 60.1 | 61.6 | 72.3 | 74.9 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Semenišin, M.; Steponavičius, D.; Kemzūraitė, A.; Savickas, D. Optimizing UAV Spraying for Sustainability: Different System Spray Drift Control and Adjuvant Performance. Sustainability 2025, 17, 2083. https://doi.org/10.3390/su17052083
Semenišin M, Steponavičius D, Kemzūraitė A, Savickas D. Optimizing UAV Spraying for Sustainability: Different System Spray Drift Control and Adjuvant Performance. Sustainability. 2025; 17(5):2083. https://doi.org/10.3390/su17052083
Chicago/Turabian StyleSemenišin, Michail, Dainius Steponavičius, Aurelija Kemzūraitė, and Dainius Savickas. 2025. "Optimizing UAV Spraying for Sustainability: Different System Spray Drift Control and Adjuvant Performance" Sustainability 17, no. 5: 2083. https://doi.org/10.3390/su17052083
APA StyleSemenišin, M., Steponavičius, D., Kemzūraitė, A., & Savickas, D. (2025). Optimizing UAV Spraying for Sustainability: Different System Spray Drift Control and Adjuvant Performance. Sustainability, 17(5), 2083. https://doi.org/10.3390/su17052083