
Cracking the Code of Car Crashes: How Autonomous and Human Driving Differ in Risk Factors


Abstract
1. Introduction
2. Literature Review
2.1. Risk Factors in Human-Driven Vehicles
2.2. Risk Factors in Autonomous Vehicles
3. Materials and Methods
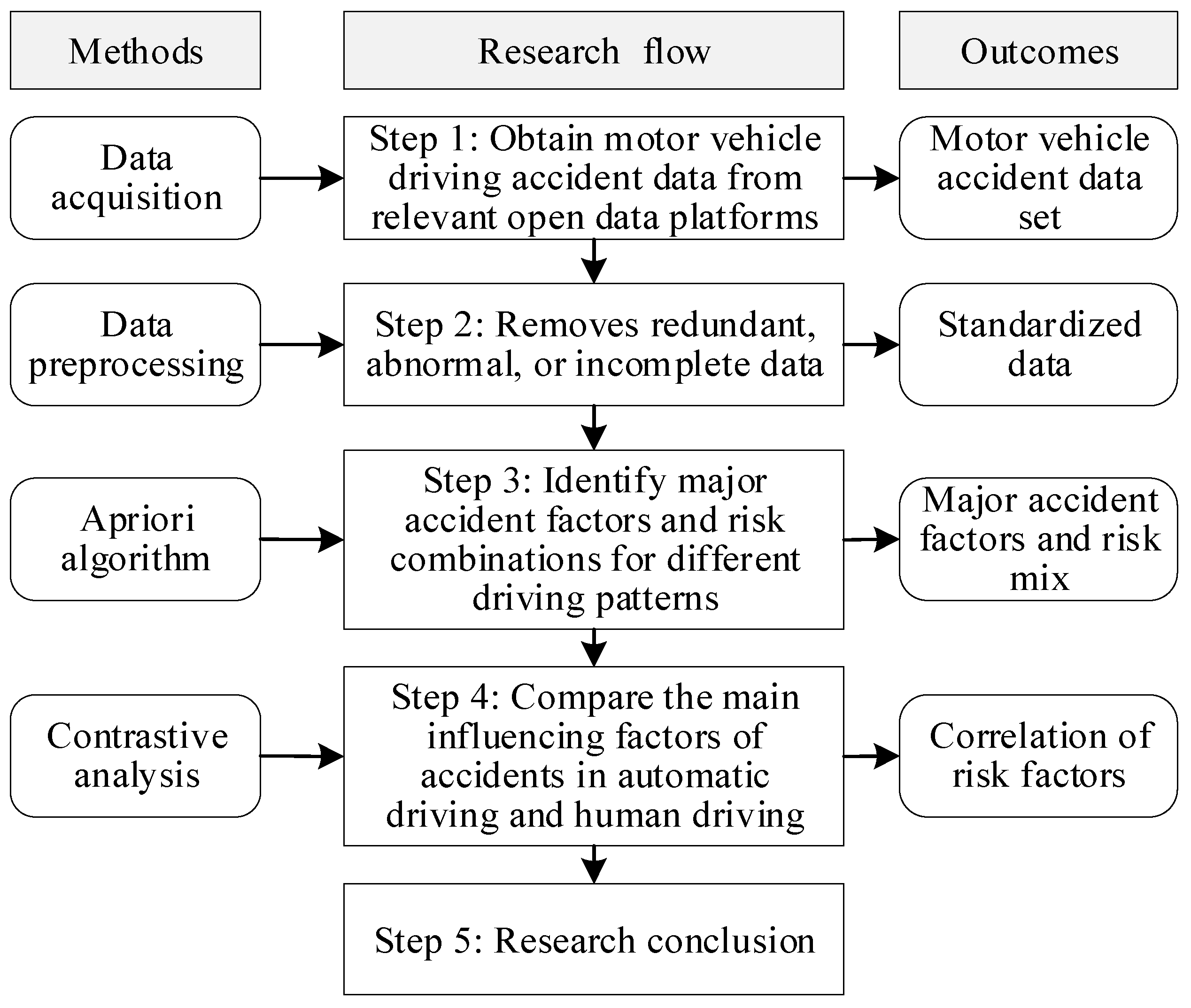
3.1. The Analytical Framework
3.2. Data Source
3.2.1. Autopilot Accident Data
3.2.2. Human Driving Accident Data
3.3. Data Preprocessing
3.3.1. Data Specification
3.3.2. Data Conversion
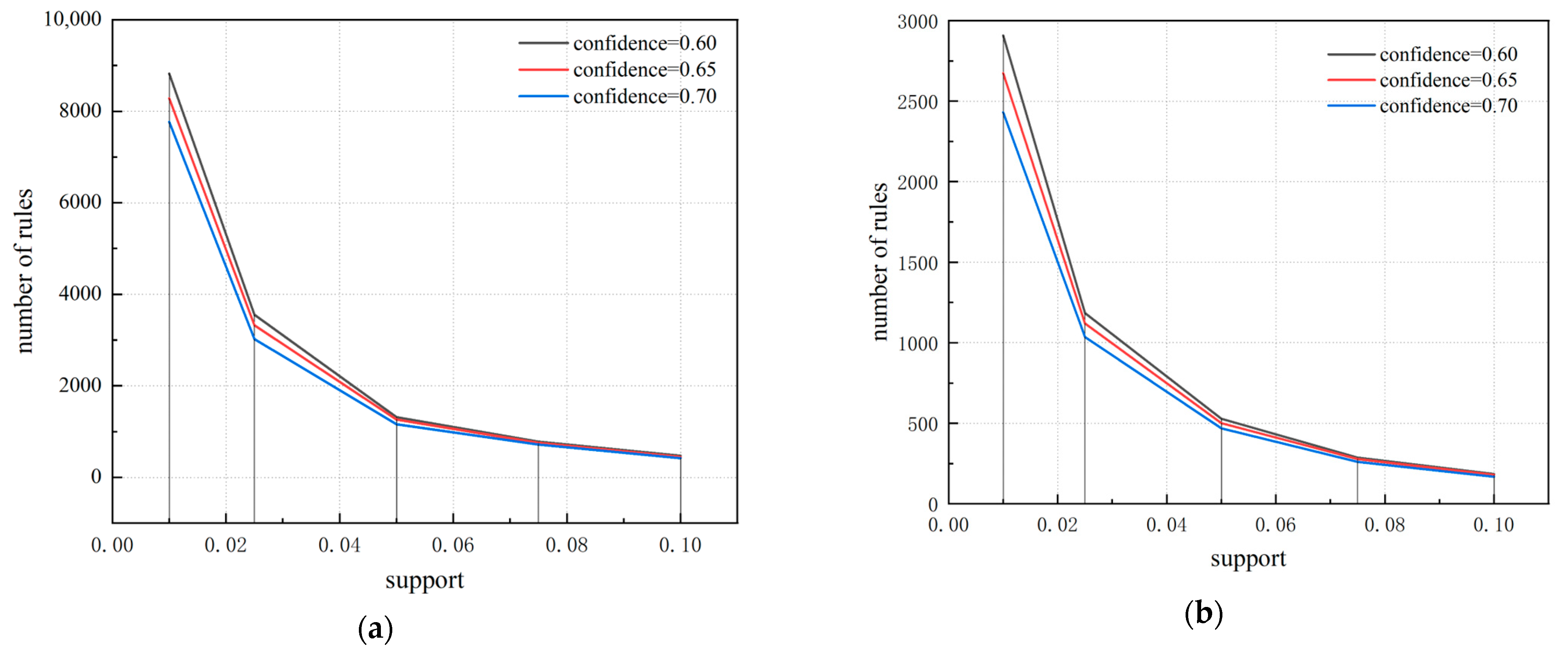
3.4. Association Rules
4. Results
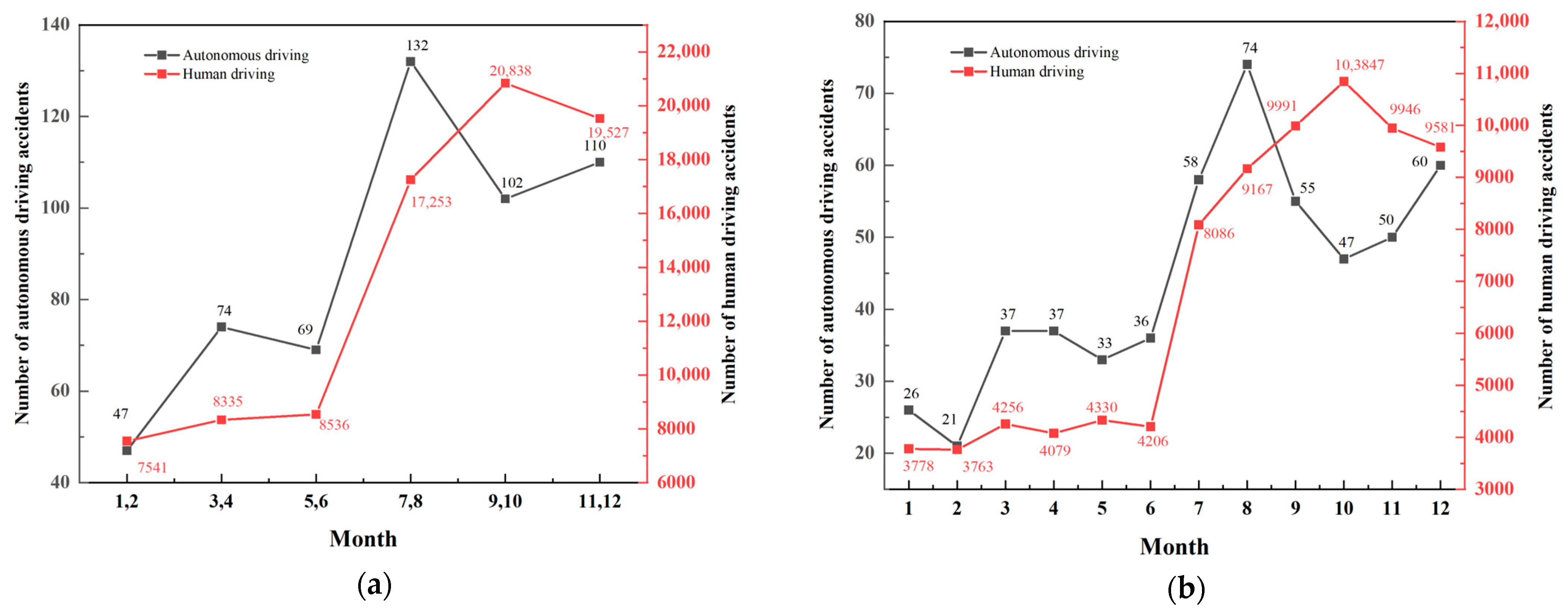
4.1. Time Feature Analysis
4.1.1. Monthly Feature
4.1.2. Period Feature
4.2. Weather Feature Analysis
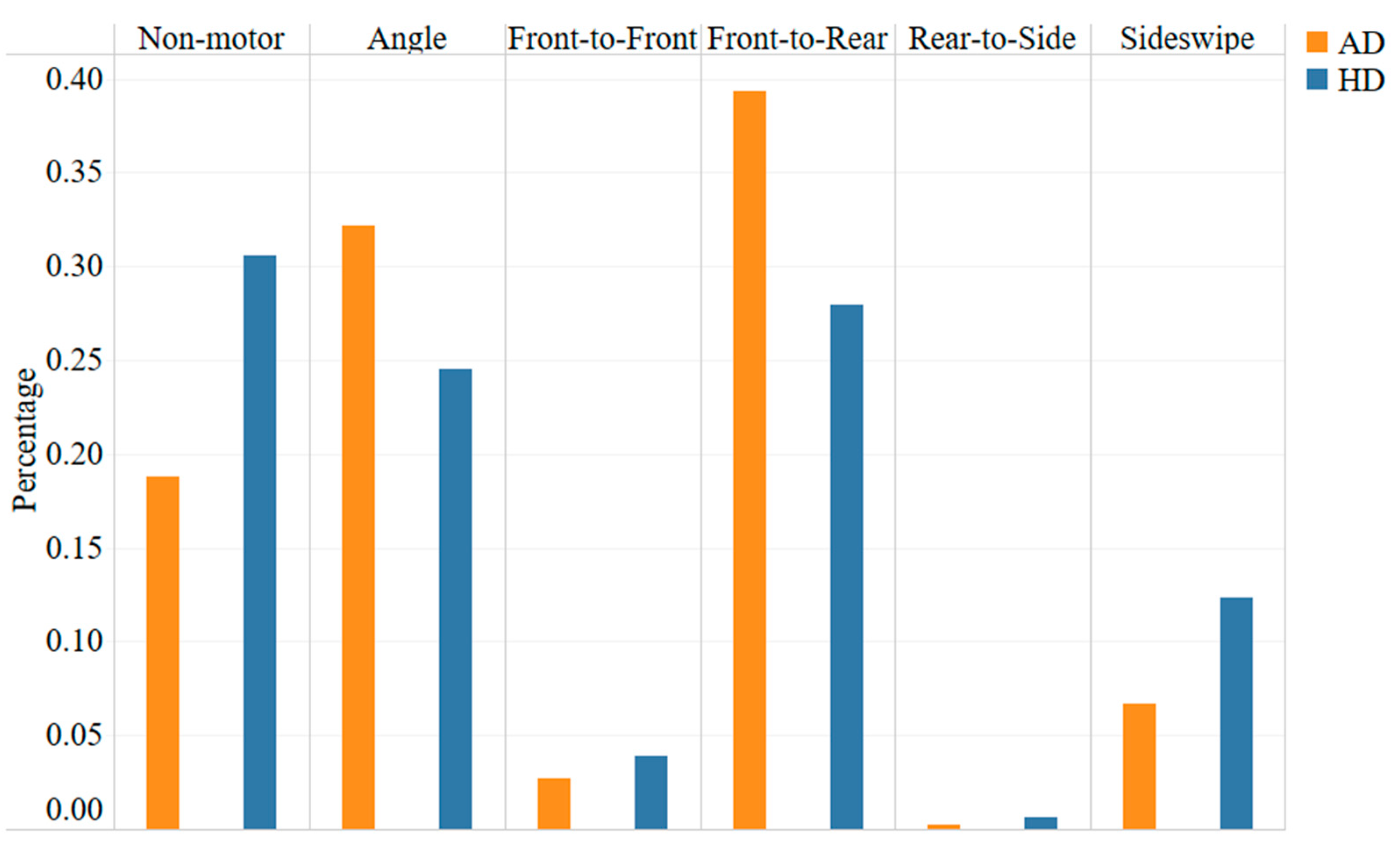
4.3. Collision Position Analysis
4.4. Association Rule Analysis
4.4.1. Association Rules
- Association rule analysis for AD
- 2.
- Association rule analysis for HD
4.4.2. Crash Damage
- Association rules for no-damage crashes
- 2.
- Association rules for minor-damage crashes
- 3.
- Association rules for major-damage crashes
4.5. Association Rule Analysis
5. Discussion
5.1. Rear-End Collisions and System Optimization
5.2. Collision Risks for Non-Motorized Road Users
5.3. Intersection Safety
5.4. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2023: Summary; World Health Organization: Geneva, Switzerland, 2023; ISBN 9240086455. [Google Scholar]
- Soundarapandiyan, R.; Venkatachalam, D.; Selvaraj, A. Real-Time Data Analytics in Connected Vehicles: Enhancing Telematics Systems for Autonomous Driving and Intelligent Transportation Systems. Aust. J. Mach. Learn. Res. Appl. 2023, 3, 420–461. [Google Scholar]
- Zhang, Y.; Carballo, A.; Yang, H.; Takeda, K. Perception and Sensing for Autonomous Vehicles under Adverse Weather Conditions: A Survey. ISPRS J. Photogramm. Remote Sens. 2023, 196, 146–177. [Google Scholar] [CrossRef]
- Ji, Y.; Huang, Y.; Yang, M.; Leng, H.; Ren, L.; Liu, H.; Chen, Y. Physics-Informed Deep Learning for Virtual Rail Train Trajectory Following Control. Reliab. Eng. Syst. Saf. 2025, 261, 111092. [Google Scholar] [CrossRef]
- Sadaf, M.; Iqbal, Z.; Javed, A.R.; Saba, I.; Krichen, M.; Majeed, S.; Raza, A. Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects. Technologies 2023, 11, 117. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, H.; Smart, E.; Yu, H. Real-Time Performance-Focused Localization Techniques for Autonomous Vehicle: A Review. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6082–6100. [Google Scholar] [CrossRef]
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An Overview of Autonomous Vehicles Sensors and Their Vulnerability to Weather Conditions. Sensors 2021, 21, 5397. [Google Scholar] [CrossRef]
- Ji, Y.; Huang, Y.; Zeng, J.; Ren, L.; Chen, Y. A Physical-data-Driven Combined Strategy for Load Identification of Tire Type Rail Transit Vehicle. Reliab. Eng. Syst. Saf. 2025, 253, 110493. [Google Scholar] [CrossRef]
- Barabas, I.; Todoruţ, A.; Cordoş, N.; Molea, A. Current Challenges in Autonomous Driving. In Proceedings of the IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2017; Volume 252, p. 012096. [Google Scholar]
- Neumann, T. Analysis of Advanced Driver-Assistance Systems for Safe and Comfortable Driving of Motor Vehicles. Sensors 2024, 24, 6223. [Google Scholar] [CrossRef]
- Petridou, E.; Moustaki, M. Human Factors in the Causation of Road Traffic Crashes. Eur. J. Epidemiol. 2000, 16, 819–826. [Google Scholar] [CrossRef]
- Young, K.; Regan, M.; Hammer, M. Driver Distraction: A Review of the Literature. Distracted Driv. 2007, 2007, 379–405. [Google Scholar]
- Kelly, E.; Darke, S.; Ross, J. A Review of Drug Use and Driving: Epidemiology, Impairment, Risk Factors and Risk Perceptions. Drug Alcohol Rev. 2004, 23, 319–344. [Google Scholar] [CrossRef] [PubMed]
- Smith, A.; Smith, H. Perceptions of Risk Factors for Road Traffic Accidents. Adv. Soc. Sci. Res. J. 2017, 4, 140–146. [Google Scholar] [CrossRef]
- Begum, S. Intelligent Driver Monitoring Systems Based on Physiological Sensor Signals: A Review. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 282–289. [Google Scholar]
- Munla, N.; Khalil, M.; Shahin, A.; Mourad, A. Driver Stress Level Detection Using HRV Analysis. In Proceedings of the 2015 international conference on advances in biomedical engineering (ICABME), Beirut, Lebanon, 16–18 September 2015; pp. 61–64. [Google Scholar]
- Stanton, N.A.; Salmon, P.M. Human Error Taxonomies Applied to Driving: A Generic Driver Error Taxonomy and Its Implications for Intelligent Transport Systems. Saf. Sci. 2009, 47, 227–237. [Google Scholar] [CrossRef]
- Perumal, P.S.; Sujasree, M.; Chavhan, S.; Gupta, D.; Mukthineni, V.; Shimgekar, S.R.; Khanna, A.; Fortino, G. An Insight into Crash Avoidance and Overtaking Advice Systems for Autonomous Vehicles: A Review, Challenges and Solutions. Eng. Appl. Artif. Intell. 2021, 104, 104406. [Google Scholar] [CrossRef]
- Yeong, D.J.; Velasco-Hernandez, G.; Barry, J.; Walsh, J. Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef]
- Das, P. Risk Analysis of Autonomous Vehicle and Its Safety Impact on Mixed Traffic Stream; Rowan University: Glassboro, NJ, USA, 2018; ISBN 0355875748. [Google Scholar]
- Teoh, E.R.; Kidd, D.G. Rage against the Machine? Google’s Self-Driving Cars versus Human Drivers. J. Saf. Res. 2017, 63, 57–60. [Google Scholar] [CrossRef]
- Zhang, Z.; Liniger, A.; Dai, D.; Yu, F.; Van Gool, L. End-to-End Urban Driving by Imitating a Reinforcement Learning Coach. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 15222–15232. [Google Scholar]
- Martin, H.; Winkler, B.; Grubmüller, S.; Watzenig, D. Identification of Performance Limitations of Sensing Technologies for Automated Driving. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–6. [Google Scholar]
- Moradloo, N. The Role of Automated Vehicles in Enhancing Road Safety: A Comprehensive Evaluation of Operational Safety Challenges in Mixed-Traffic Environment. Ph.D. Thesis, University of Tennessee, Knoxville, TN, USA, 2024. Available online: https://trace.tennessee.edu/utk_graddiss/1137 (accessed on 16 April 2025).
- Favarò, F.M.; Nader, N.; Eurich, S.O.; Tripp, M.; Varadaraju, N. Examining Accident Reports Involving Autonomous Vehicles in California. PLoS ONE 2017, 12, e0184952. [Google Scholar] [CrossRef]
- Khattak, Z.H.; Fontaine, M.D.; Smith, B.L. Exploratory Investigation of Disengagements and Crashes in Autonomous Vehicles under Mixed Traffic: An Endogenous Switching Regime Framework. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7485–7495. [Google Scholar] [CrossRef]
- Min, C.; Si, S.; Wang, X.; Xue, H.; Jiang, W.; Liu, Y.; Wang, J.; Zhu, Q.; Zhu, Q.; Luo, L. Autonomous Driving in Unstructured Environments: How Far Have We Come? arXiv 2024, arXiv:2410.07701. [Google Scholar]
- Liu, P.; Guo, Y.; Liu, P.; Ding, H.; Cao, J.; Zhou, J.; Feng, Z. What Can We Learn from the AV Crashes?—An Association Rule Analysis for Identifying the Contributing Risky Factors. Accid. Anal. Prev. 2024, 199, 107492. [Google Scholar] [CrossRef]
- ANSI D16.1–2007; Manual on Classification of Motor Vehicle Traffic Accidents. American National Standards Institute: Washington, DC, USA, 2007.
- Agrawal, R.; Mannila, H.; Srikant, R.; Toivonen, H.; Verkamo, A.I. Fast Discovery of Association Rules. Adv. Knowl. Discov. Data Min. 1996, 12, 307–328. [Google Scholar]
- Montella, A. Identifying Crash Contributory Factors at Urban Roundabouts and Using Association Rules to Explore Their Relationships to Different Crash Types. Accid. Anal. Prev. 2011, 43, 1451–1463. [Google Scholar] [CrossRef] [PubMed]
- Kohanpour, E.; Davoodi, S.R.; Shaaban, K. Analyzing Autonomous Vehicle Collision Types to Support Sustainable Transportation Systems: A Machine Learning and Association Rules Approach. Sustainability 2024, 16, 9893. [Google Scholar] [CrossRef]
- Kusano, K.D.; Gabler, H.C. Potential Effectiveness of Integrated Forward Collision Warning, Pre-Collision Brake Assist, and Automated Pre-Collision Braking Systems in Real-World, Rear-End Collisions. In Proceedings of the 22st International Technical Conference on the Enhanced Safety of Vehicles (ESV 2011), Washington, DC, USA, 13–16 June 2011. [Google Scholar]
- Cicchino, J.B. Effectiveness of Forward Collision Warning and Autonomous Emergency Braking Systems in Reducing Front-to-Rear Crash Rates. Accid. Anal. Prev. 2017, 99, 142–152. [Google Scholar] [CrossRef]
- Verret, R.M., Jr. The Influence of Selected Factors Impacting the Incidence and Severity of Accidents Involving Pedestrian/Bicyclists and Motorized Vehicles in Urban Areas of Louisiana; Louisiana State University and Agricultural & Mechanical College: Baton Rouge, LA, USA, 2019; ISBN 9798438709732. [Google Scholar]
- Berge, S.H.; de Winter, J.; Cleij, D.; Hagenzieker, M. Triangulating the Future: Developing Scenarios of Cyclist-Automated Vehicle Interactions from Literature, Expert Perspectives, and Survey Data. Transp. Res. Interdiscip. Perspect. 2024, 23, 100986. [Google Scholar] [CrossRef]
- Chao, Q.; Bi, H.; Li, W.; Mao, T.; Wang, Z.; Lin, M.C.; Deng, Z. A Survey on Visual Traffic Simulation: Models, Evaluations, and Applications in Autonomous Driving. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2020; Volume 39, pp. 287–308. [Google Scholar]
- Nabors, D.; Goughnour, E.; Sawyer, M. Non-Motorized User Safety: A Manual for Local Rural Road Owners; Federal Highway Administration: Washington, DC, USA, 2012. [Google Scholar]
- Qu, Y.; Ou, Y.; Xiong, R. Low Illumination Enhancement for Object Detection in Self-Driving. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1738–1743. [Google Scholar]
- Saez-Perez, J.; Wang, Q.; Alcaraz-Calero, J.M.; Garcia-Rodriguez, J. Design, Implementation, and Empirical Validation of a Framework for Remote Car Driving Using a Commercial Mobile Network. Sensors 2023, 23, 1671. [Google Scholar] [CrossRef]
- Hu, X.; Lodewijks, G. Exploration of the Effects of Task-Related Fatigue on Eye-Motion Features and Its Value in Improving Driver Fatigue-Related Technology. Transp. Res. Part F Traffic. Psychol. Behav. 2021, 80, 150–171. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Variable | Abbreviation | Category | Definitions |
|---|---|---|---|---|
| Vehicle features | Vehicle type involved | Vec_type | VEC1/VEC2/VEC3/VEC4 | Motor Vehicle/Non-Motorist/Animal/Object |
| Traffic conditions | Month of year | Month | MON1/MON2/MON3/MON4/MON5/MON6 | January, February/March, April/May, June/July, August/September, October/November, December |
| Weather condition | Weather | WEA1/WEA2/WEA3/WEA4 | Clear/Cloudy/Raining or Snowing/Foggy or Smoky | |
| Time of day | Time | TIM1/TIM2/TIM3/TIM4 | 07:00–11:00/11:00–14:00/14:00–18:00/18:00–07:00 | |
| Lighting conditions | Light_con | CON1/CON2/CON3/CON4 | Daylight/Dawn or Dusk/Dark—Lighted/Dark—Not Lighted | |
| Crash feature | Type of crash | Crash_type | TYP1/TYP2/TYP3/TYP4/TYP5/TYP6/TYP7 | Angle/Front to Front/Front to Rear/Non-motor Vehicle/Rear to Side/Side Swipe/Rear to Rear |
| Vehicle damage | Damage | NONE/MINOR/MAJOR | No damage/Minor damage/Major damage | |
| Location of crash | Location | LOC1/LOC2/LOC3/LOC4/LOC5 | Highway/Intersection/Parking Lot/Street/Traffic Circle |
| Support | Confidence | Execution Time per Second | |||
|---|---|---|---|---|---|
| FP-Growth | Apriori | ||||
| AD Dataset | HD Dataset | AD Dataset | HD Dataset | ||
| 0.01 | 0.6 | 4.8231 | 4.1479 | 1.7994 | 1.6973 |
| 0.01 | 0.65 | 4.8035 | 4.2373 | 1.6389 | 1.7725 |
| 0.01 | 0.7 | 4.8817 | 4.2363 | 1.5871 | 1.7313 |
| 0.025 | 0.6 | 4.4329 | 3.3379 | 0.8267 | 0.6812 |
| 0.025 | 0.65 | 4.3848 | 3.3115 | 0.924 | 0.6975 |
| 0.025 | 0.7 | 4.4569 | 3.3557 | 0.8292 | 0.6819 |
| 0.05 | 0.6 | 3.8221 | 2.6175 | 0.3617 | 0.3176 |
| 0.05 | 0.65 | 3.7784 | 2.681 | 0.3659 | 0.2715 |
| 0.05 | 0.7 | 3.7241 | 2.5995 | 0.3591 | 0.2652 |
| 0.075 | 0.6 | 3.1636 | 2.0943 | 0.1991 | 0.1549 |
| 0.075 | 0.65 | 3.2443 | 2.2141 | 0.18 | 0.1452 |
| 0.075 | 0.7 | 3.3434 | 2.1034 | 0.186 | 0.1455 |
| 0.1 | 0.6 | 2.8076 | 1.7271 | 0.0803 | 0.0773 |
| 0.1 | 0.65 | 2.7575 | 1.7376 | 0.0904 | 0.0788 |
| 0.1 | 0.7 | 2.7704 | 1.7772 | 0.0784 | 0.08 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Time = 14:00–18:00, Crash_type = Non-motor Vehicle | Vec_type = Non-Motorist | 0.051 | 0.906 | 9.504 |
| 2 | Vec_type = Non-Motorist, Location = Street | Crash_type = Non-motor Vehicle | 0.066 | 1.000 | 6.769 |
| 3 | Vec_type = Non-Motorist, Weather = Clear, Location = Street | Crash_type = Non-motor Vehicle | 0.059 | 1.000 | 6.769 |
| 4 | Time = 14:00–18:00, Vec_type = Non-Motorist | Crash_type = Non-motor Vehicle | 0.051 | 1.000 | 6.769 |
| 5 | Vec_type = Non-Motorist, Weather = Clear | Crash_type = Non-motor Vehicle | 0.088 | 1.000 | 6.769 |
| 6 | Vec_type = Non-Motorist | Crash_type = Non-motor Vehicle | 0.095 | 1.000 | 6.769 |
| 7 | Vec_type = Non-Motorist, Light_con = Daylight | Crash_type = Non-motor Vehicle | 0.073 | 1.000 | 6.769 |
| 8 | Location = Street, Vec_type = Non-Motorist, Light_con = Daylight | Crash_type = Non-motor Vehicle | 0.055 | 1.000 | 6.769 |
| 9 | Vec_type = Non-Motorist, Weather = Clear, Light_con = Daylight | Crash_type = Non-motor Vehicle | 0.066 | 1.000 | 6.769 |
| 10 | Time = 18:00–07:00 | Light_con = Dark—Lighted | 0.270 | 0.848 | 2.999 |
| 11 | Light_con = Dark—Lighted | Time = 18:00–07:00 | 0.270 | 0.954 | 2.999 |
| 12 | Time = 11:00–14:00 | Light_con = Daylight | 0.190 | 1.000 | 1.500 |
| 13 | Weather = Cloudy, Location = Intersection | Light_con = Daylight | 0.053 | 1.000 | 1.500 |
| 14 | Time = 14:00–18:00, Location = Street | Light_con = Daylight | 0.100 | 1.000 | 1.500 |
| 15 | Time = 07:00–11:00, Location = Intersection | Light_con = Daylight | 0.074 | 0.974 | 1.462 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Vec_type = Non-Motorist, Light_con = Daylight | Crash_type = Non-motor Vehicle | 0.058 | 1.000 | 3.274 |
| 2 | Vec_type = Non-Motorist, Weather = Clear | Crash_type = Non-motor Vehicle | 0.077 | 1.000 | 3.274 |
| 3 | Vec_type = Non-Motorist | Crash_type = Non-motor Vehicle | 0.096 | 1.000 | 3.274 |
| 4 | Vec_type = Object | Crash_type = Non-motor Vehicle | 0.169 | 1.000 | 3.274 |
| 5 | Vec_type = Non-Motorist, Location = Intersection | Crash_type = Non-motor Vehicle | 0.052 | 1.000 | 3.274 |
| 6 | Crash_type = Non-motor Vehicle, Light_con = Dark—Lighted | Time = 18:00–07:00 | 0.064 | 0.942 | 2.679 |
| 7 | Weather = Clear, Light_con = Dark—Lighted | Time = 18:00–07:00 | 0.126 | 0.923 | 2.624 |
| 8 | Light_con = Dark—Lighted, Location = Intersection | Time = 18:00–07:00 | 0.076 | 0.916 | 2.604 |
| 9 | Light_con = Dark—Lighted | Time = 18:00–07:00 | 0.164 | 0.913 | 2.597 |
| 10 | Location = Intersection, Light_con = Dark—Lighted, Vec_type = Motor Vehicle | Time = 18:00–07:00 | 0.057 | 0.910 | 2.588 |
| 11 | Light_con = Dark—Not Lighted | Time = 18:00–07:00 | 0.088 | 0.906 | 2.577 |
| 12 | Light_con = Dark—Lighted, Vec_type = Motor Vehicle | Time = 18:00–07:00 | 0.100 | 0.896 | 2.547 |
| 13 | Damage = No damage, Light_con = Dark—Lighted | Time = 18:00–07:00 | 0.066 | 0.890 | 2.532 |
| 14 | Crash_type = Angle | Location = Intersection | 0.182 | 0.745 | 1.713 |
| 15 | Crash_type = Side Swipe | Damage = No damage | 0.091 | 0.734 | 1.520 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Crash_type = Angle, Light_con = Dark—Lighted | Damage = No damage | 0.078 | 1.000 | 1.237 |
| 2 | Crash_type = Angle, Location = Street | Damage = No damage | 0.083 | 1.000 | 1.237 |
| 3 | Crash_type = Angle, Time = 18:00–07:00 | Damage = No damage | 0.086 | 1.000 | 1.237 |
| 4 | Crash_type = Angle, Time = 07:00–11:00 | Damage = No damage | 0.065 | 1.000 | 1.237 |
| 5 | Vec_type = Motor Vehicle, Weather = Cloudy | Damage = No damage | 0.061 | 1.000 | 1.236 |
| 6 | Location = Intersection, Weather = Cloudy | Damage = No damage | 0.053 | 1.000 | 1.236 |
| 7 | Time = 14:00–18:00, Weather = Cloudy | Damage = No damage | 0.053 | 1.000 | 1.236 |
| 8 | Location = Street, Time = 14:00–18:00 | Damage = No damage | 0.096 | 0.963 | 1.191 |
| 9 | Light_con = Dark—Lighted, Location = Street, Vec_type = Motor Vehicle | Damage = No damage | 0.075 | 0.934 | 1.155 |
| 10 | Crash_type = Angle | Damage = No damage | 0.255 | 0.933 | 1.154 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Crash_type = Side Swipe | Damage = No damage | 0.091 | 0.734 | 1.520 |
| 2 | Crash_type = Front to Rear | Damage = No damage | 0.158 | 0.570 | 1.179 |
| 3 | Weather = Raining or Snowing | Damage = No damage | 0.051 | 0.544 | 1.126 |
| 4 | Vec_type = Motor Vehicle | Damage = No damage | 0.371 | 0.534 | 1.106 |
| 5 | Location = Highway | Damage = No damage | 0.048 | 0.534 | 1.104 |
| 6 | Time = 07:00–11:00 | Damage = No damage | 0.090 | 0.518 | 1.072 |
| 7 | Time = 14:00–18:00 | Damage = No damage | 0.154 | 0.507 | 1.050 |
| 8 | Time = 11:00–14:00 | Damage = No damage | 0.083 | 0.506 | 1.047 |
| 9 | Weather = Cloudy | Damage = No damage | 0.064 | 0.503 | 1.040 |
| 10 | Light_con = Daylight | Damage = No damage | 0.336 | 0.501 | 1.037 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Crash_type = Front to Rear, Time = 07:00–11:00 | Damage = Minor damage | 0.031 | 0.503 | 4.993 |
| 2 | Light_con = Daylight, Location = Street, Vec_type = Non-Motorist, Weather = Clear | Damage = Minor damage | 0.020 | 0.427 | 4.239 |
| 3 | Light_con = Daylight, Location = Street, Vec_type = Non-Motorist | Damage = Minor damage | 0.020 | 0.371 | 3.683 |
| 4 | Crash_type = Front to Rear, Location = Street | Damage = Minor damage | 0.030 | 0.308 | 3.056 |
| 5 | Location = Street, Vec_type = Non-Motorist | Damage = Minor damage | 0.020 | 0.307 | 3.051 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Vec_type = Non-Motorist | Damage = Minor damage | 0.041 | 0.425 | 2.641 |
| 2 | Crash_type = Non-motor Vehicle, Location = Intersection | Damage = Minor damage | 0.026 | 0.350 | 2.176 |
| 3 | Crash_type = Non-motor Vehicle | Damage = Minor damage | 0.067 | 0.218 | 1.355 |
| 4 | Location = Intersection, Time = 18:00–07:00 | Damage = Minor damage | 0.027 | 0.202 | 1.253 |
| 5 | Crash_type = Angle, Light_con = Daylight, Location = Intersection | Damage = Minor damage | 0.027 | 0.201 | 1.247 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Crash_type = Angle, Light_con = Daylight, Location = Highway, Time = 14:00–18:00 | Damage = Major damage | 0.007 | 1.000 | 33.646 |
| 2 | Crash_type = Non-motor Vehicle, Location = Street, Weather = Cloudy | Damage = Major damage | 0.007 | 1.000 | 33.646 |
| 3 | Vec_type = Non-Motorist, Weather = Cloudy | Damage = Major damage | 0.007 | 1.000 | 33.646 |
| 4 | Location = Traffic Circle | Damage = Major damage | 0.008 | 0.998 | 33.593 |
| 5 | Crash_type = Side Swipe, Time = 11:00–14:00 | Damage = Major damage | 0.007 | 0.997 | 33.537 |
| No. | Antecedent | Consequent | Support | Confidence | Lift |
|---|---|---|---|---|---|
| 1 | Crash_type = Front to Front, Time = 18:00–07:00 | Damage = Major damage | 0.006 | 0.359 | 2.984 |
| 2 | Time = 18:00–07:00, Vec_type = Non-Motorist | Damage = Major damage | 0.013 | 0.324 | 2.693 |
| 3 | Light_con = Dark—Lighted, Vec_type = Non-Motorist | Damage = Major damage | 0.008 | 0.317 | 2.637 |
| 4 | Crash_type = Front to Front | Damage = Major damage | 0.012 | 0.296 | 2.459 |
| 5 | Crash_type = Non-motor Vehicle, Light_con = Dark—Lighted | Damage = Major damage | 0.016 | 0.240 | 1.997 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, S.; Liu, L. Cracking the Code of Car Crashes: How Autonomous and Human Driving Differ in Risk Factors. Sustainability 2025, 17, 4368. https://doi.org/10.3390/su17104368
Qin S, Liu L. Cracking the Code of Car Crashes: How Autonomous and Human Driving Differ in Risk Factors. Sustainability. 2025; 17(10):4368. https://doi.org/10.3390/su17104368
Chicago/Turabian StyleQin, Shengyan, and Li Liu. 2025. "Cracking the Code of Car Crashes: How Autonomous and Human Driving Differ in Risk Factors" Sustainability 17, no. 10: 4368. https://doi.org/10.3390/su17104368
APA StyleQin, S., & Liu, L. (2025). Cracking the Code of Car Crashes: How Autonomous and Human Driving Differ in Risk Factors. Sustainability, 17(10), 4368. https://doi.org/10.3390/su17104368