3.2. Objective Function
Combined with the actual scheduling process of container terminal berths and cranes, the objective function divides each operation link. Furthermore, it divides the comprehensive production cost of the terminal into four parts: vessel operation cost,
; vessel delayed departure cost,
; vessel deviation cost,
; and terminal crane maintenance cost,
.
Container vessels require auxiliary motors for energy supply during berthing to maintain the necessary vessel operations and onboard facilities. Carbon emissions are also generated when the vessels are at berth in the port. Therefore, the carbon emissions of container vessels during the period between berthing and departure from the port must be considered when calculating the carbon tax cost.
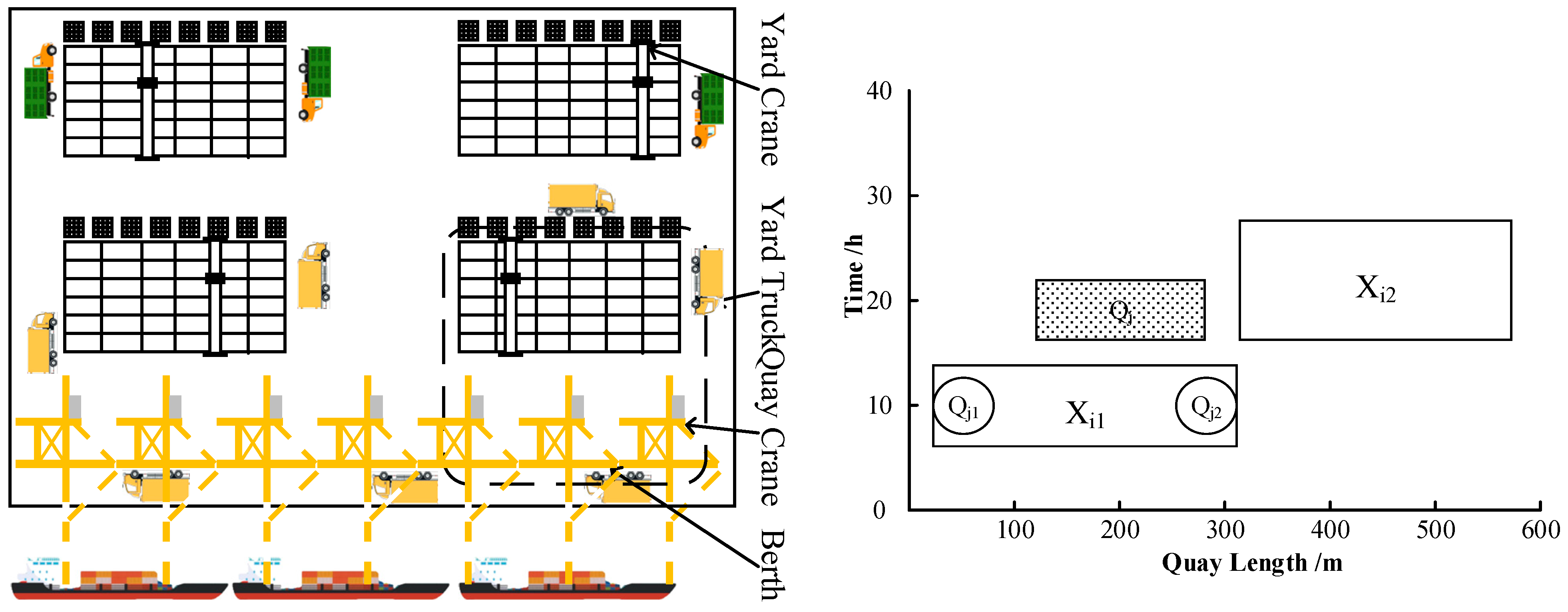
Based on the above parameter definitions and cost definitions, ships and quay cranes in the planning period are taken as the study objects, and practical constraints, such as time, space, energy consumption and carbon tax, are considered. As a result, a mixed integer planning model is constructed with the objective of minimizing port operation and carbon tax costs. The objective function and constraints are as follows:
Constraint (7) stipulates that the actual berthing position of the vessel must be within the shoreline of the quay. Constraint (8) defines the relative berthing position relationship between different vessels.
Constraint (9) indicates that there is a buffer time,
, to berth after the vessel’s expected arrival time.
Constraints (10) and (11) define a sequential relationship between any two vessels in time and space, with no conflicts in the temporal and spatial dimensions.
Constraint (12) defines a constraint on the number of quay crane jobs on board vessel
at moment
.
Constraint (13) limits quay crane service to one vessel at a time. When there exists a common berthing period for two vessels, no quay crane
can serve both vessels
and
at the same time.
In accounting for the uncertainty in quay crane operation efficiency, constraint (14) explicitly outlines that the quay crane operation efficiency during dynamic scheduling comprises both the average efficiency of quay crane operation and buffer efficiency. Simultaneously, it addresses the mutual interference among quay cranes during operation and considers the impact of a vessel deviating from the optimal berthing position. This approach aims to minimize the effects of uncertainties in quay crane operation time at the terminal.
Constraint (15) defines the total crane amount constraints for the different states.
Constraint (16) denotes the number of dock cranes that move to vessel
more at moment
than at time
.
Constraints (17) and (18) indicate that none of the quay cranes serving the same vessel or different quay cranes at the same moment may work crosswise and that the quay cranes serve sequentially on the shoreline.
Constraints (19) and (20) indicate the impact of a dock crane with a maintenance program on other dock cranes during the same time period.
Constraint (21) defines the range of maintenance periods for quay cranes.
Constraint (22) defines the relation between the period experienced when the quay crane is in a maintenance state and the maintenance time.
Constraint (23) defines the relationship between the work and maintenance status of a quay crane during the same period.
3.3. Adaptive Spiral Flight Dung Beetle Algorithm
The dung beetle optimizer algorithm is a novel population intelligence optimization algorithm proposed by Xue et al. [
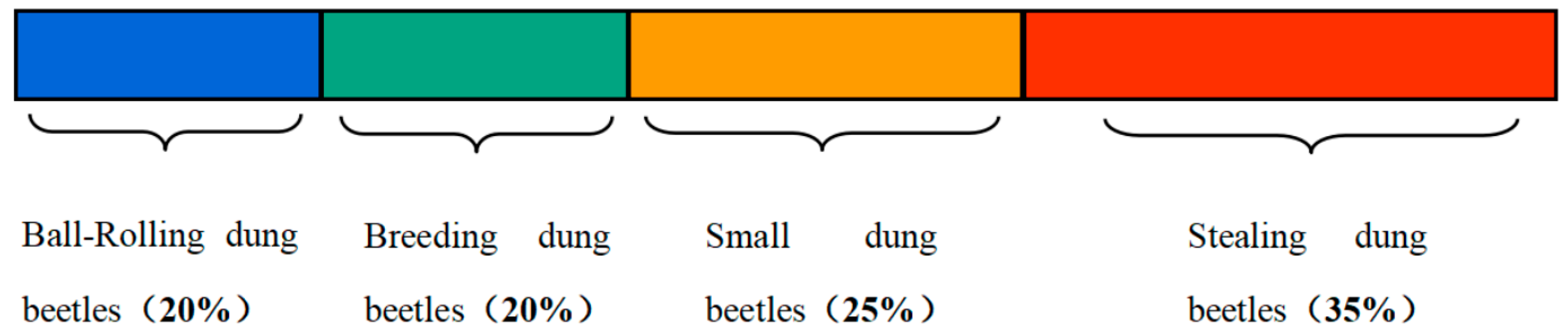
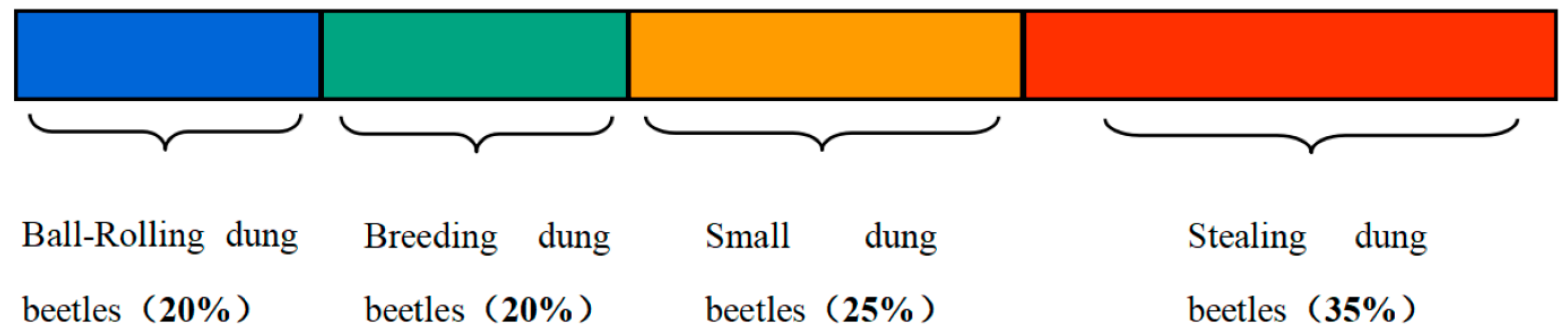
28] in 2023, and which is inspired by the social behaviors of dung beetle populations, i.e., dung beetles’ ball-rolling, dancing, foraging, breeding, and stealing behaviors.
Figure 2 shows the proportion of population species distribution in the DBO algorithm.
Rolling dung beetles explore space through two behavioral patterns: rolling dung balls and dancing. While rolling the dung ball, light is usually used as a guide to help the dung beetle to roll in a straight line. Its movement path is affected by the intensity of the light source, and the manner in which its position is updated while rolling the dung ball can be described as shown in Equation (24).
where
is the position information of the ith dung beetle at the tth iteration;
is the deviation coefficient,
;
is a constant,
; and
is the global worst position.
We use a probabilistic approach to set α to either 1 or −1. When
, it indicates that the natural environment does not affect the original direction; when
, it indicates a deviation from the original direction—the dung beetle dances to obtain a new rolling direction when encountering an obstacle. The formula for its position update is shown in Equation (25).
Dung beetles are notable for their ecological role, and they have a unique behavior of securing breeding offspring by rolling their feces into balls to a safe location.
In Equations (26) and (27), represents the current localized best position and and represent the upper and lower boundaries of the spawning area, respectively. , and is the maximum number of iterations.
In the DBO algorithm, a female dung beetle determines the spawning area and then chooses a suitable breeding ball to lay her eggs. The algorithm determines that each female dung beetle can only lay one egg per iteration, and the boundary range of the spawning area changes dynamically with each iteration, which is mainly determined by the parameter R. The location of the breeding balls is also adjusted to adapt to the iteration process. As a result, the position of the breeding ball is also dynamically adjusted with the iteration process to adapt to the environmental changes, thus simulating the behavioral strategies of dung beetles in the natural environment and ensuring the offspring’s safety and the effective use of resources.
In Equation (28), denotes the position information of the ith breeding sphere at the tth iteration, and and represent two independent random vectors of size 1 × D. where ‘D’ represents the dimension of the optimization problem.
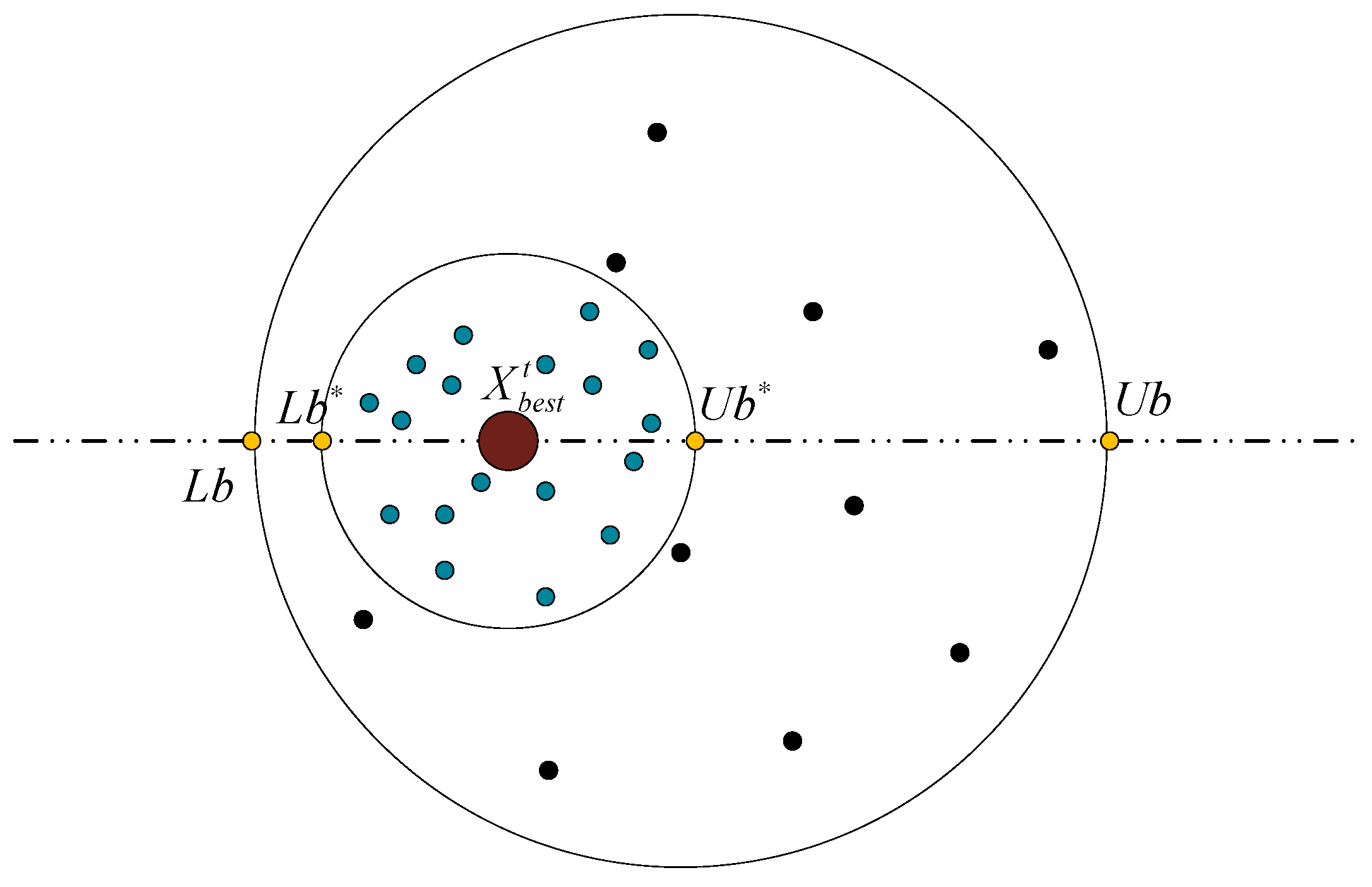
We introduce a boundary selection strategy to simulate the selection of the spawning region, as shown in
Figure 3. The black dots indicate the position of the rolling dung beetle, while the current local optimal position
is marked by a large brown circle, and the blue colored dots around
indicate the breeding ball. In addition, yellow dots indicate the upper and lower limits of the boundary.
To simulate the process of small dung beetles searching for food in nature, we constructed a concept of an optimal foraging zone. The boundaries of this zone were set to locations that would guide the dung beetle to forage efficiently.
In Equations (29) and (30), is the global best position, and and are the lower and upper limits of the best foraging area, respectively.
Small dung beetle locations have been updated as follows:
In Equation (31), is a random number following a normal distribution and is a random vector within the range (0,1).
The stealing dung beetle does not steal from any arbitrary location but instead performs its stealing behavior near the best place to steal, i.e., near the globally optimal location. The location update rules for stealing dung beetles are as follows:
where
is a random vector of size 1 × D following a normal distribution,
denotes a constant,
denotes the global best position, and
denotes the current local best position.
In general, the DBO algorithm has fast convergence and high solution accuracy. Nevertheless, it grapples with drawbacks such as susceptibility to local optima and limited global exploration ability. The original DBO algorithm requires enhancements in both the exploration and exploitation phases. The proposed ASFDBO algorithm addresses this imbalance through improvements in the Bernoulli mapping strategy, variable spiral search strategy, Lévy flight strategy, adaptive weighting strategy, and Gauss–Cauchy hybrid variational perturbation strategy.
3.3.1. Chaotic Mapping Initializes the Population
Chaos mapping, an amalgamation of deterministic and stochastic approaches, is distinguished by its inherent characteristics of randomness and non-periodicity. Bernoulli mapping, a subtype of chaotic mapping, is frequently employed for the generation of chaotic sequences due to its nonlinear, ergodic, and random characteristics. In the realm of optimization, it replaces random numbers for population initialization, significantly influencing the algorithmic process. Studies, such as the work by Saito et al. [
29], have demonstrated that Bernoulli mapping outperforms random numbers in achieving optimal results during the optimization searches. The research also underscores the suitability of Bernoulli mapping for chaotic population initialization, showcasing its traversal uniformity and convergence speed. Through well-designed experiments, Saito et al. [
29] provided evidence supporting the use of Bernoulli mapping for the generation of initial populations in optimization algorithms. The distribution of chaotic sequences generated by Bernoulli mapping is depicted in
Figure 4, further illustrating its effectiveness in this context.
Therefore, in this paper, Bernoulli mapping is used to initialize the position of dung beetle individuals. Firstly, the Bernoulli mapping relation is used to project the resulting values into the space of chaotic variables. Then, the resulting chaotic values are mapped into the initial space of the algorithm by a linear transformation. The specific expression of Bernoulli mapping is:
where
is the mapping parameter,
.
3.3.2. Variable Spiral Search Strategy
The whale optimization algorithm, commonly known as the WOA algorithm, draws inspiration from the distinctive feeding behavior of humpback whales. The spiral-up strategy in the WOA algorithm effectively improves the convergence of the algorithm to continue searching in the position near the individual. This strategy is incorporated into the dung beetle breeding ball formula and the small dung beetle foraging formula of the original dung beetle algorithm by adding the dynamic spiral parameter again so that the breeding ball position and the small dung beetle foraging are both in the form of a spiral within the search space. This expands the discoverer’s ability to explore the unknown region, helps the algorithm to jump out of a local optimum, and effectively improves the algorithm’s global search ability.
Dynamic spiral parameters in this paper are as follows:
where the parameter
k is generally taken as 5.
The improved formula for the position of the dung beetle breeding ball is as follows:
where
represents a random number within the range
.
The improved formula for the foraging behavior of small dung beetles is as follows:
Analyzing the above formulas, it can be seen that the introduction of the variable spiral search strategy makes parameter u change continuously during the iteration process, which can dynamically adjust the scope of the spiral search. This is conducive to enhancing the flexibility of the search and improving the algorithm’s performance of the globally optimal search.
3.3.3. Adaptive Weighting and Lévy Flight Strategies
The adaptive weight is a crucial parameter in the dung beetle algorithm, necessitating adjustment. In the early iterations, a higher adaptive weight is employed to broaden the global search range, facilitating an extensive exploration for the global optimal solution. Conversely, in the later iterations, a smaller inertia weight is required to enhance the algorithm’s proficiency in utilizing the local area and preventing it from converging to a local optimal solution.
The adaptive weighting factors proposed in this paper are as follows:
Lévy flight [
30] is a random walk process proposed by the French mathematician Lévy. Lévy flight randomly alternates between large and small steps, allowing for an algorithm to effectively jump out of a local optimum. The Lévy flight strategy is introduced into the stealing behavior of the stealing dung beetle, which perturbs the current optimal solution and strengthens the local escape ability.
The improved formula for the stealing behavior of dung beetles is as follows:
where
conforms to the Lévy distribution and satisfies
. Due to the complexity of Lévy flights, they are usually modeled using the Mantegna algorithm [
31], with the step size
S given as follows:
In Equation (39), both
and
follow a normal distribution:
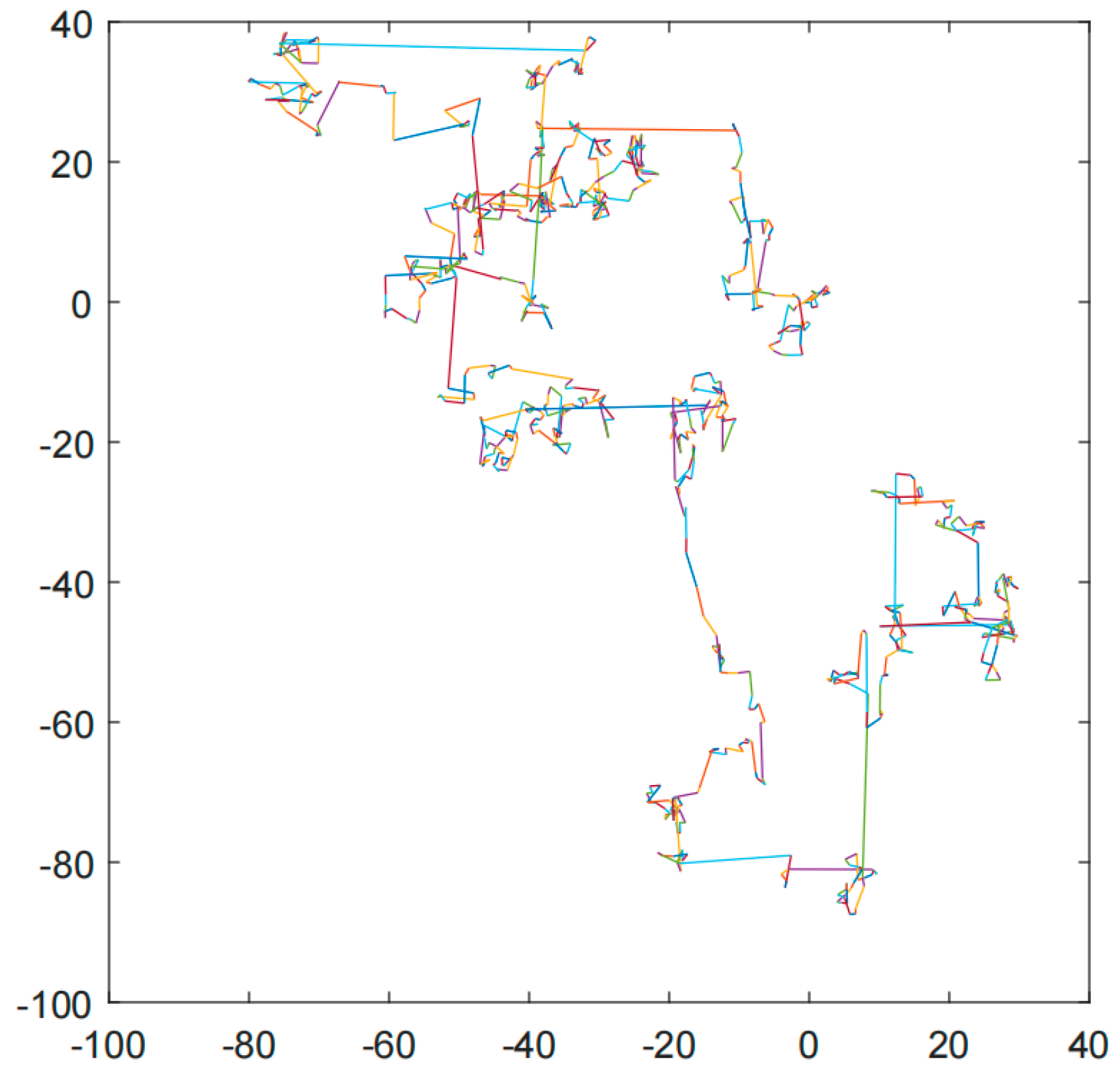
Figure 5 shows the simulation of a 2D planar Lévy flight in Matlab using Mantegna’s method; from the simulation, the paths of the graphs are indeed in line with the characteristics of Lévy flights in terms of their lengths and shorter lengths, and Mantegna’s method of generating stochastic steps that obey a Lévy distribution with a normal distribution is reliable.
3.3.4. Gauss–Cauchy Mixed Variants Perturbation
In the later iterations of the basic dung beetle algorithm, individual dung beetles assimilate rapidly, causing the population to aggregate near the current optimal position. This position’s value approximates the optimal solution. However, the current optimal position is not a globally optimal point. In that case, the dung beetle population tends to concentrate its search around this position, leading to a failure in discovering the optimal position and resulting in a stagnant search. To address this issue, a variational perturbation operation is commonly employed to disturb individuals, thereby increasing population diversity and allowing them to move beyond local optima [
32]. The mutation perturbation operation enhances the population diversity of dung beetles, enabling the algorithm to escape local optima and explore other regions of the solution space. This exploration continues until the global optimum solution is ultimately found. Introducing variation operators in intelligent optimization algorithms augments population diversity and prevents the algorithm from becoming stuck in a local minima [
33]. Among the commonly used variation operators, Cauchy and Gauss variations have advantages and disadvantages. The Cauchy variant provides a more extensive search range than the Gauss variant. However, its step size, being too large, may cause it to jump away from the optimum, resulting in poorer progeny [
34]. On the other hand, the Gauss variant exhibits good search ability within a small range [
35], due to its capability to produce smaller variant values with a higher probability.
In Equation (41), is a random number obeying the Cauchy distribution; is a random number obeying the Gauss distribution; is the position after the mutation, , ; and the weight coefficients of the mutation operator , are gradually changed in a one-dimension and linear manner, a manner which is aimed at guaranteeing that the perturbation of each iteration is equilibrium smoothed.
Early in the iteration of the algorithm, the Cauchy variation plays a greater role, expanding the search range of the population. The Gauss variation plays a major role in allowing individuals to search in a small area, enhancing the local search ability of the population, and allowing the algorithm to converge quickly.
3.3.5. Parameterization of the ASFDBO Algorithm
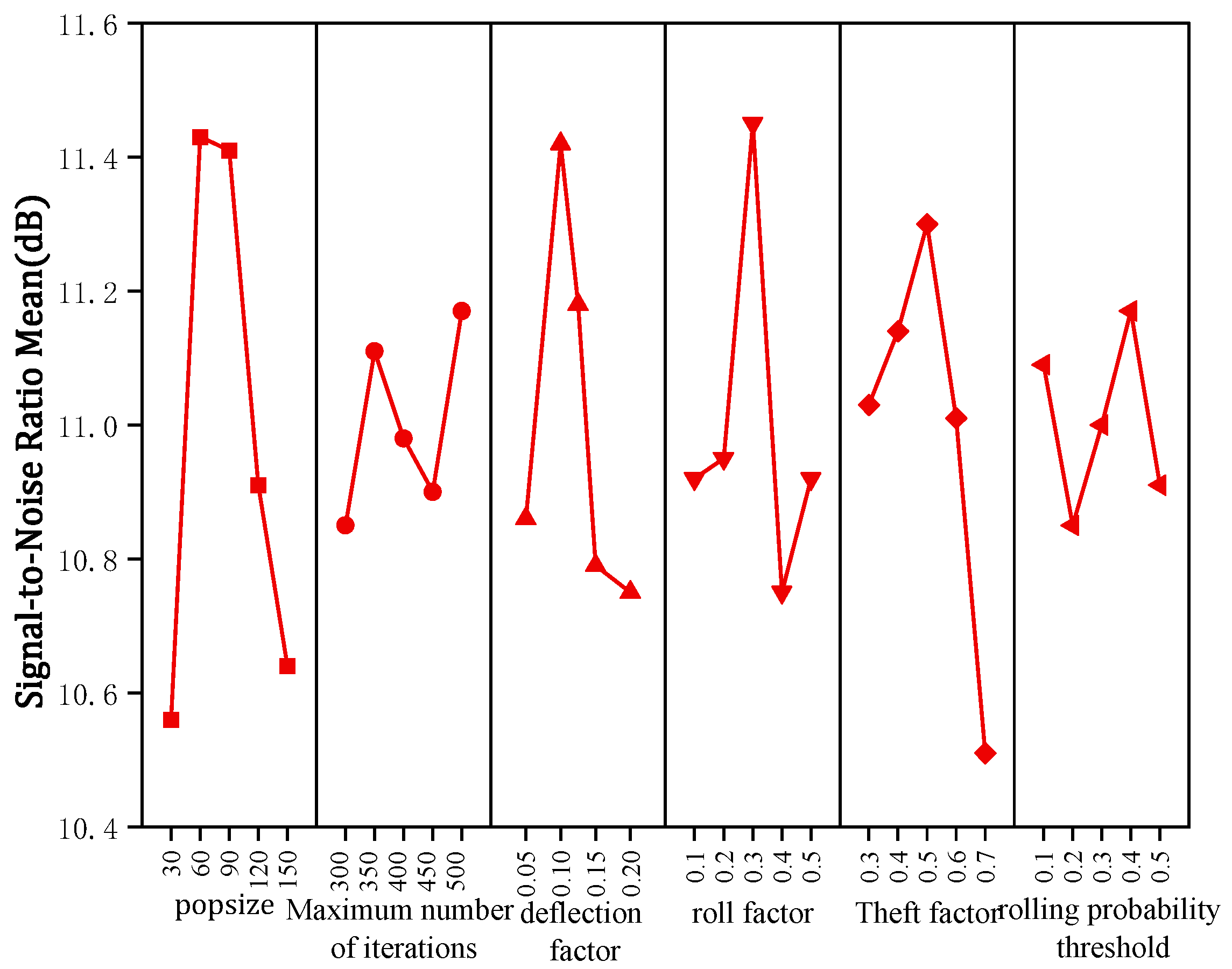
In this study, the Taguchi method is used to determine the algorithm parameters, and the signal-to-noise ratio (SNR) is utilized to evaluate the algorithm’s performance under different combinations of parameters. During the implementation of the algorithm, parameters such as popsize, maximum number of iterations (), deflection coefficient (), roll coefficient (), steal coefficient (), and roll probability threshold () are required to be set.
Figure 6 shows the main effect plot of the signal-to-noise ratio of the algorithm parameters generated in Minitab 21.4 software. Based on the analysis results, we determined the following values for each parameter: popsize is 90, maximum number of iteration generations (
) is 500, deflection coefficient (
) is 0.1, roll coefficient (
) is 0.3, stealing coefficient (
) is 0.5, and roll probability threshold (
) is 0.4.
3.3.6. ASFDBO Algorithm Validation
To assess the efficacy of the ASFDBO algorithm, a comparative analysis is conducted with other swarm intelligence optimization algorithms, namely the whale optimization algorithm (WOA) [
36], sparrow search algorithm (SSA) [
37], grey wolf optimization (GWO) [
38] and basic dung beetle optimization algorithm (DBO). All algorithms share standard settings with a maximum number of iterations (T) set at 500. Parameters for each algorithm are strictly adhered to as per the original text.
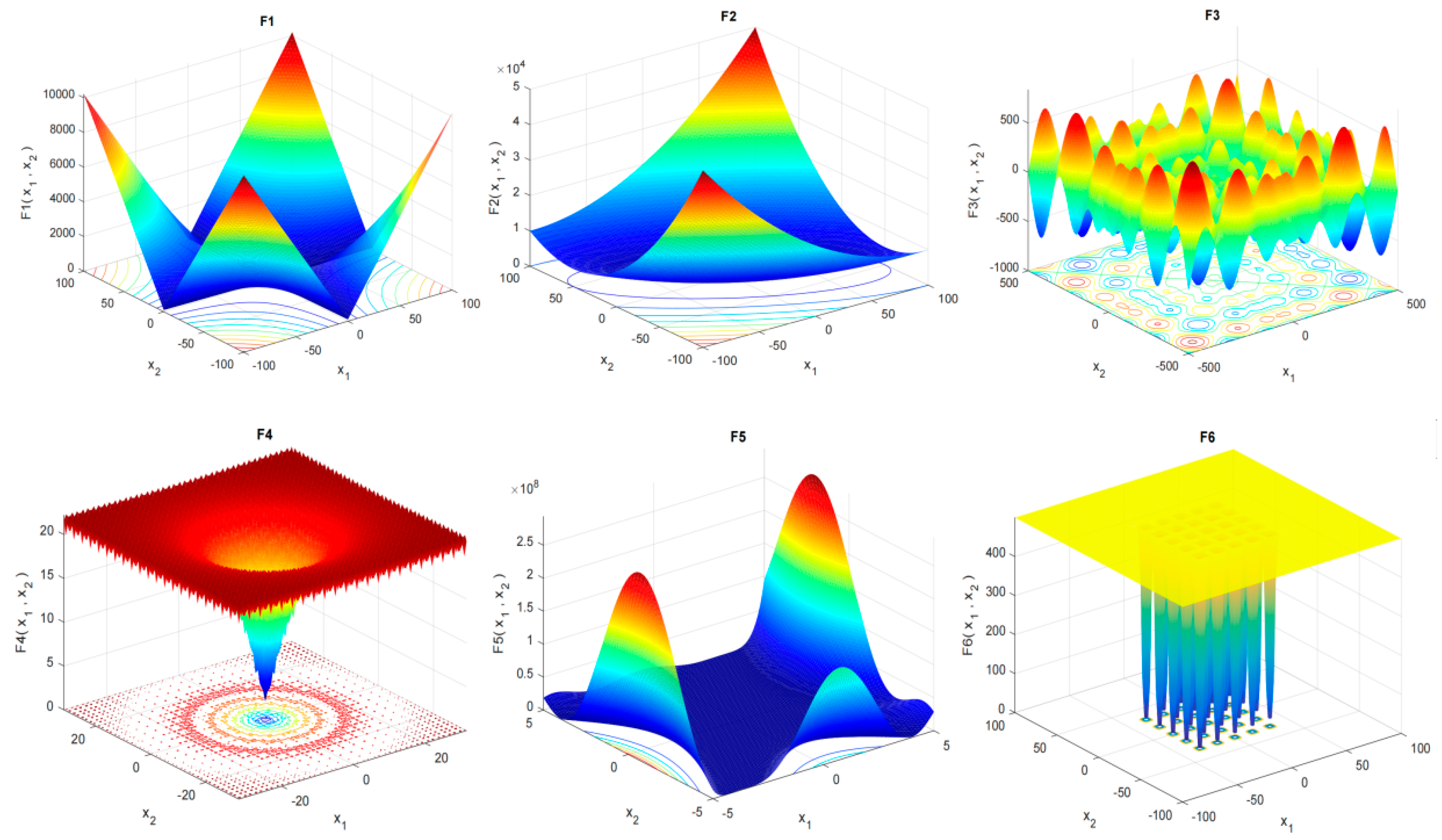
The six standard test functions in
Table 3 were used for performance testing.
Figure 7 shows a three-dimensional plot of the functions of
Table 3. Of these functions,
−
are high-dimensional single-peak functions, each featuring only one global optimal solution. These functions serve to assess the algorithm’s developmental capabilities.
−
are high-dimensional multi-peak functions characterized by one global optimal solution and multiple local optimal solutions.
−
are fixed dimensional multi-peak functions. These functions evaluate the algorithm’s proficiency in global search and local escape abilities.
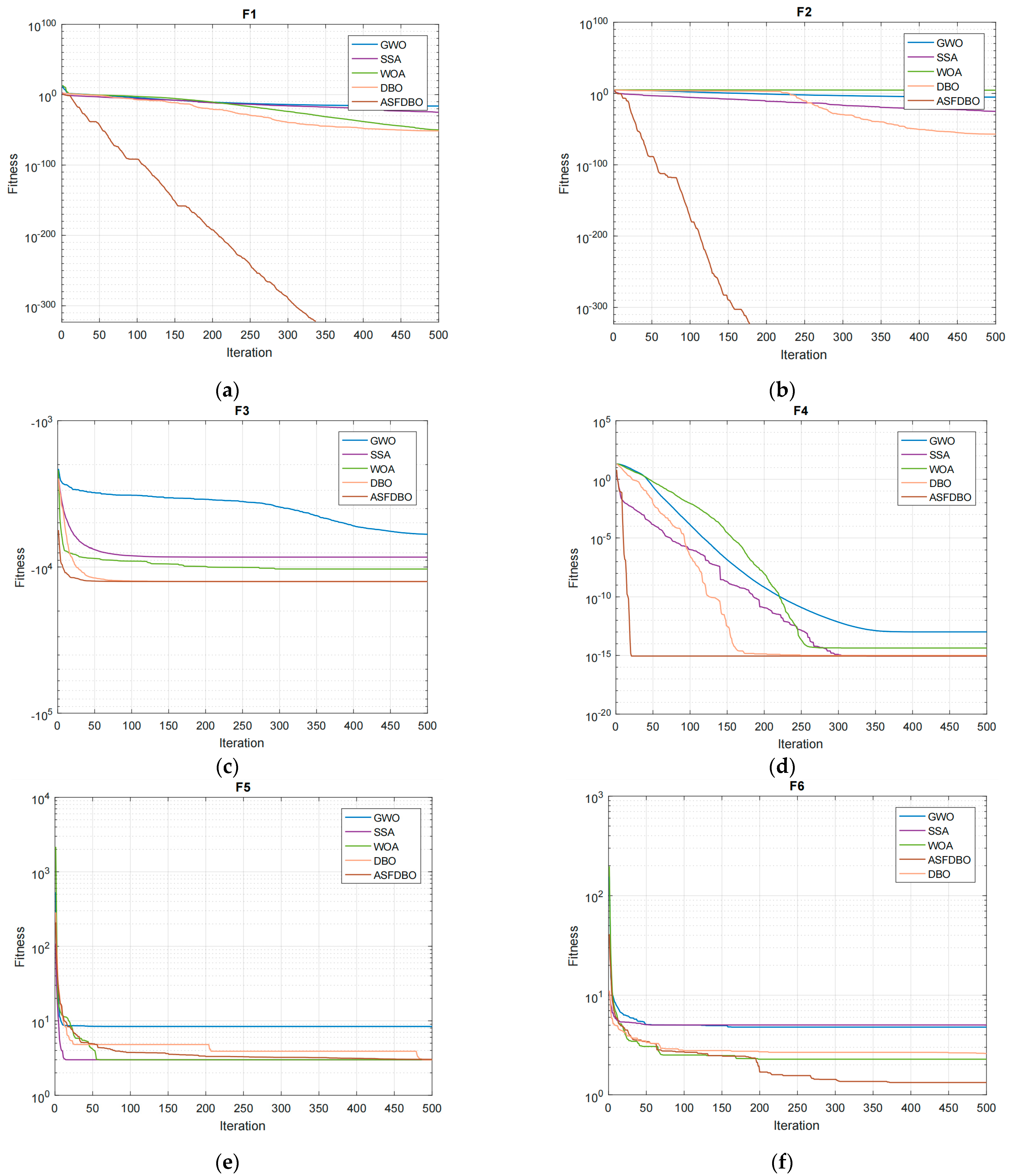
The criteria for evaluating the optimization performance of the algorithm consist of the optimal value, average value, and standard deviation, calculated from 20 optimization results. The optimal value signifies the algorithm’s accuracy, while the average value and standard deviation reflect its stability. The optimization results and convergence curves can be found in
Table 4 and
Figure 8. The results show that, for the single-peak functions
and
, the ASFDBO algorithm outperforms the other algorithms in all three evaluation criteria, which fully reflects the solid local search ability and stability of ASFDBO. For the multi-peak functions
and
, where the function
is the most complex and has many minima, only the optimal convergence values and average convergence accuracies of the DBO algorithm and the ASFDBO algorithm reach the theoretically optimal solution, but the ASFDBO is better than the DBO. As for the fixed-dimensional multi-peak test functions,
and
, the average convergence accuracies and standard deviations of the ASFDBO algorithm are ranked first, indicating that the ASFDBO algorithm can balance the exploration ability and exploitation ability well. Analyzing the convergence curve in
Figure 8, The ASFDBO algorithm demonstrates a higher convergence accuracy than the SSA algorithm, known for its robust global search capability. This indicates that the ASFDBO algorithm excels in global search proficiency relative to other algorithms. The ASFDBO algorithm consistently breaks free from locally optimal solutions multiple times, reaching more optimal solutions and showcasing its remarkable ability to escape local areas. Simultaneously, the DBO algorithm converges more rapidly than others, yet the ASFDBO algorithm surpasses its convergence accuracy and speed. This substantiates that the ASFDBO algorithm effectively balances the exploration and development abilities of the algorithm.
In order to verify the effectiveness and practical applicability of the ASFDBO algorithm in the model of this paper, we chose the traveling salesman problem (TSP), which is the same NP-hard problem as the model of this paper. We also chose the welded beam design optimization problem, an engineering design problems, for verification. In the TSP problem, we chose the eil51, eil76, and ch130 instances for the relevant tests, and the test results are summarized in
Table 5.
is the relative error between the optimal value and the known optimal solution. Each algorithm is run for 10 instances at the corresponding instance.
As can be learned from
Table 5, the simulation results based on the three TSP instances show that ASFDBO improves its solution quality by an average of 78% concerning the DBO algorithm. In the small-scale examples, ASFDBO can find the optimal solution. ASFDBO can still approach the optimum and outperform the DBO algorithm and other swarm intelligence algorithms as the example size increases. This shows that ASFDBO can find high-quality, stable solutions in different example sizes. As a result, the algorithm has better stability and robustness and is suitable for solving NP-hard problems with high complexity.
The goal of welded beam design is to minimize the cost of welded beams, and the main optimization variables are the weld thickness, h; the bar thickness, b; the length of the connected portion of the bar, l; and the height of the bar, t. As seen in the results of the comparison of the ASFDBO with the WBD problem in
Table 6, in engineering design optimization, the ASFDBO algorithm improves solution quality by 1.84% compared with the DBO algorithm. Furthermore, the ASFDBO algorithm outperforms others, proving its remarkable effectiveness in addressing engineering design optimization challenges.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}