

Every Second Counts: A Comprehensive Review of Route Optimization and Priority Control for Urban Emergency Vehicles


Abstract
1. Introduction
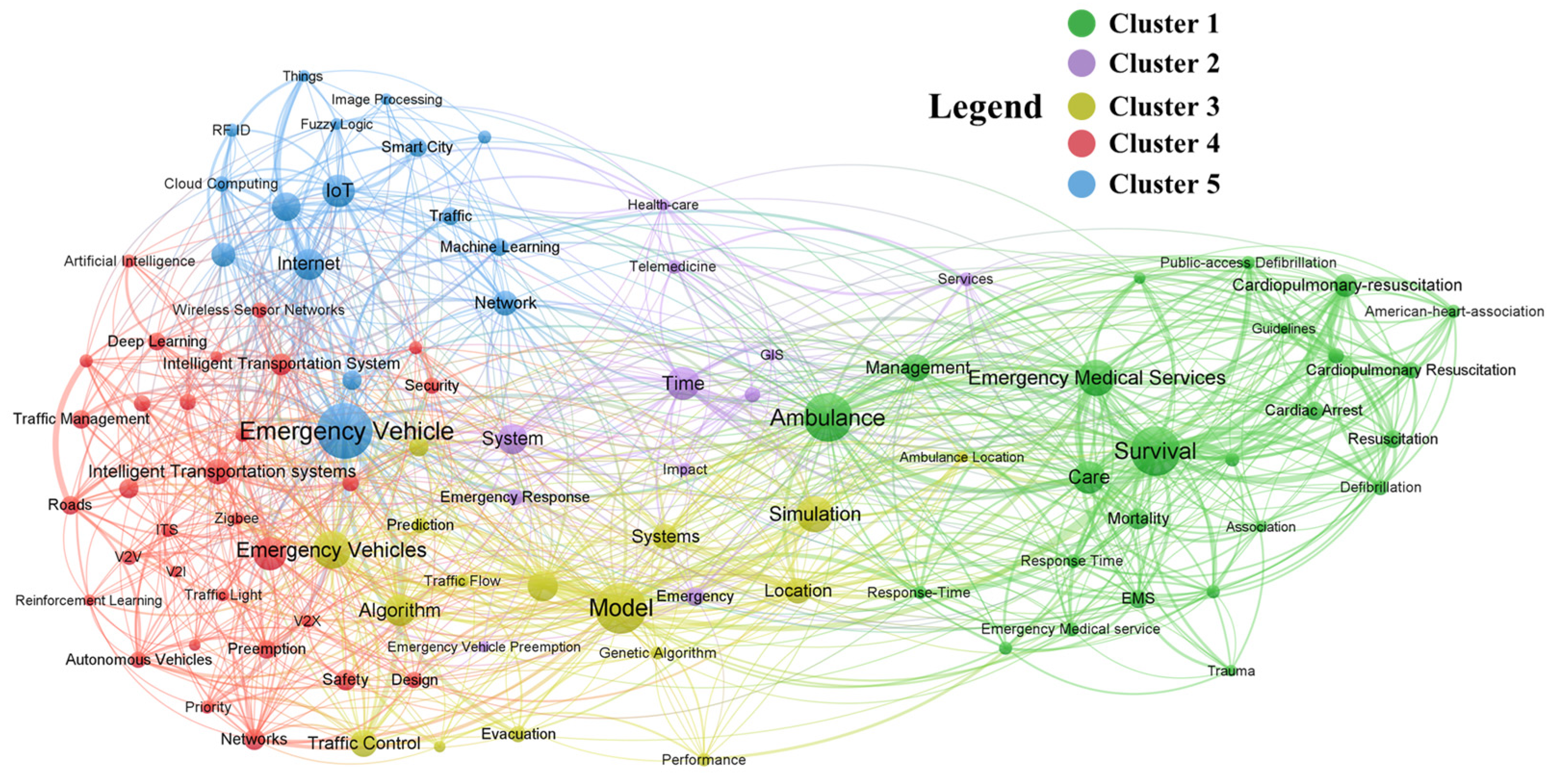
- We employed a comprehensive search methodology to systematically retrieve literature on EMV-TTP methods, EMV-RO algorithms, and EMV-TPC strategies up until March 2024. We used VOSviewer software 1.6.18 to visualize keyword co-occurrences and the most cited journals in the collected studies to reveal the current research trends and hot topics.
- In the context of emerging technologies such as VANETs and UAVs, we specifically reviewed related research on EMV-TTP, including model-based, simulation-based, API-based, and UAV-based methods. As the crucial input parameters for EMV-RO and EMV-TTP, enhancing EMV-TTP outcome accuracy can significantly improve the precision and feasibility of EMV-RO and EMV-TTP.
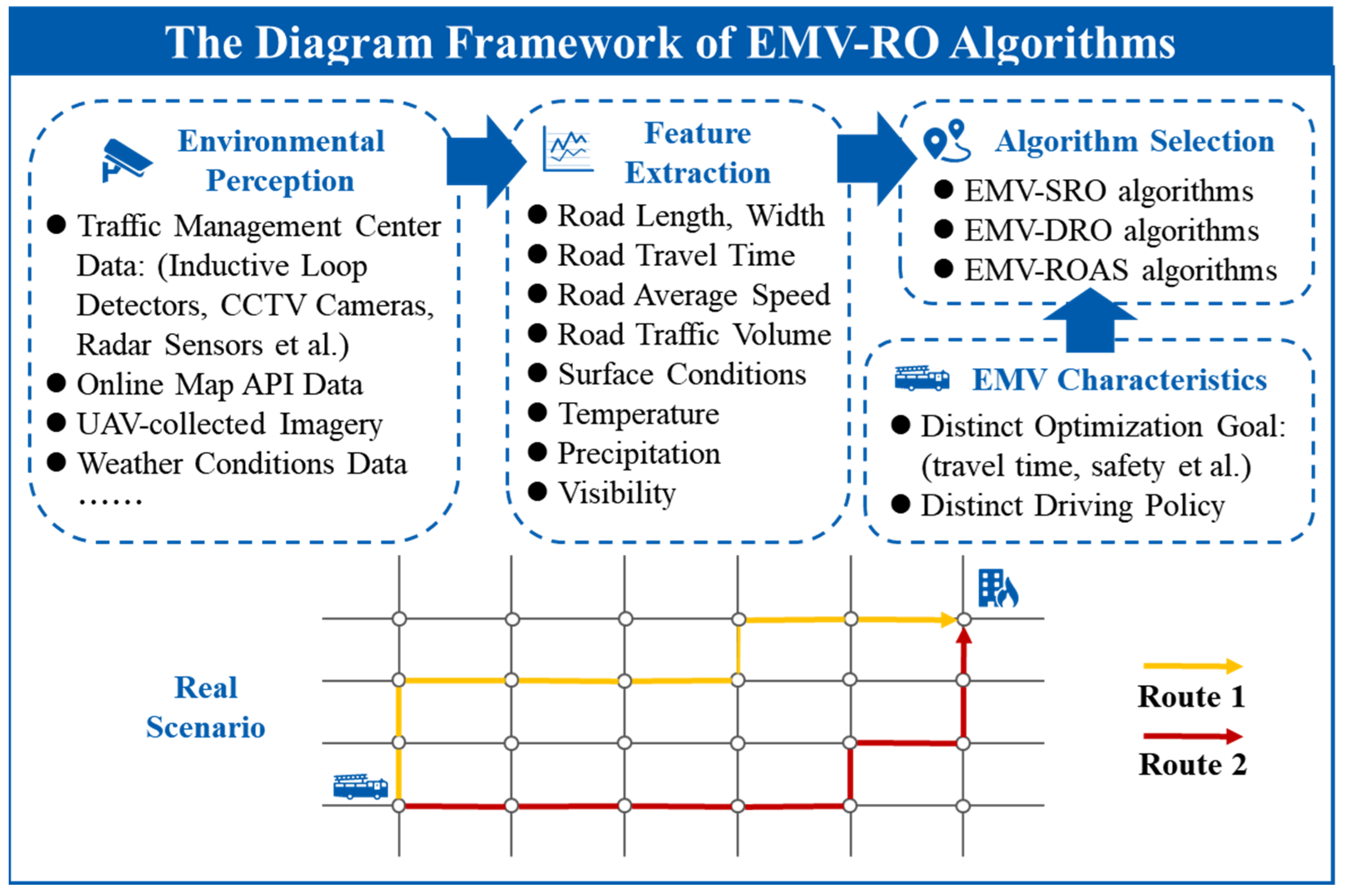
- Considering the significant differences in the characteristics between various EMVs and SVs regarding optimization objectives, vehicle attributes, vehicle dynamics, and driving policies, we divide the EMV-RO into three subclassifications for a more detailed review and provide more detailed conclusions through a comparative table.
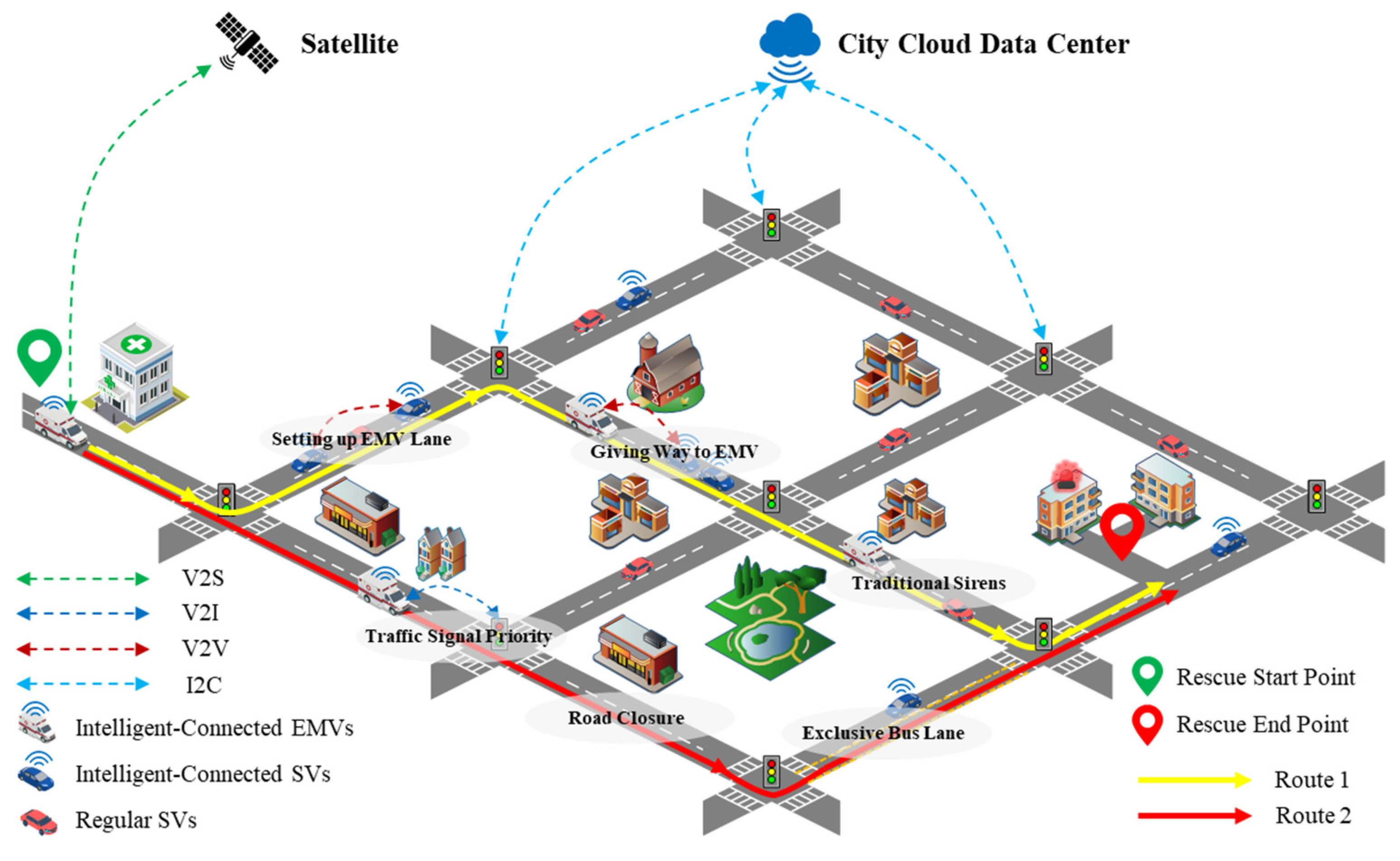
- Against the background of the emerging technologies mentioned above, we review the EMV-TPC strategies at intersections and EMV-TPC strategies on the road links simultaneously, which significantly guarantee EMV rapid traversal along the whole rescue route. Furthermore, we categorize them into several subclassifications respectively and provide helpful conclusions through a comparative table.
2. Review Methodology
2.1. Search Strategy
2.2. Bibliography Analysis
3. EMV-TTP Methods
3.1. Model-Based Methods
3.2. Simulation-Based Methods
3.3. API-Based Methods
3.4. UAV-Based Methods
3.5. Discussion
4. EMV-RO Algorithms
4.1. EMV-SRO Algorithms
4.2. EMV-DRO Algorithms
4.3. EMV-ROAS Algorithms
4.4. Discussion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author (Year) | Categories | Solving Algorithm | Optimization Objectives | Cost Functions | R.O. |
|---|---|---|---|---|---|
| Derekenaris et al. (2001) [55] | EMV-SRO | DA | EMV RT | L, SL, O | A |
| Nordin et al. (2012) [53] | EMV-SRO | A Star Algorithm | EMV TD | L | A |
| Musolino et al. (2013) [57] | EMV-SRO | Modified DA | EMV RT | T | G |
| Zhao et al. (2017) [58] | EMV-SRO | KSPA | EMV RT | T | G |
| Zhao et al. (2019) [13] | EMV-SRO | MOO Algorithm | EMV RT, DS, reliability | T | G |
| Constantinescu and Pătrașcu (2020) [54] | EMV-SRO | Genetic Algorithm | EMV RT | L, SL, O | G |
| Al Mustafid et al.(2022) [56] | EMV-SRO | Fuzzy DA | EMV TD | L | G |
| Hussein et al. (2022) [74] | EMV-SRO | Neural Network | EMV TD | L | A |
| Fu et al. (2010) [60] | EMV-DRO | PSO Algorithm | EMV RT | T | G |
| C. Wang et al. (2013) [61] | EMV-DRO | PSO Algorithm | EMV RT | T | G |
| Chen et al. (2014) [62] | EMV-DRO | Improved DA | EMV RT | T | G |
| Amer et al. (2018) [63] | EMV-DRO | Adjusted PSO Algorithm | EMV RT, emissions, et al. | L, D, T | G |
| Wen et al. (2020) [75] | EMV-DRO | Adjusted RSA Algorithm | EMV RT | T | G |
| Wang and Zlatanova (2020) [64] | EMV-DRO | Modified DA | EMV RT, DS | T, risk index | G |
| Oubbati et al. (2021) [44] | EMV-DRO | DA | EMV RT | L, AS, total vehicle number | A |
| Duan et al. (2022) [65] | EMV-DRO | DA (with SSA) | EMV RT | L, T, traffic jam index | G |
| Jose and Vijula Grace (2022) [2] | EMV-DRO | KSPA (with Exp-BSA) | EMV RT, TD, et al. | L, D, T, AS | G |
| Mahariba et al. (2022) [11] | EMV-DRO | MSSTT Algorithm (with GIS) | EMV RT | T | G |
| Liu et al. (2023) [35] | EMV-DRO | Gradual Path Planning Algorithm | EMV RT, TE | T | G |
| Gedawy (2008) [68] | EMV-ROAS | D Star Lite Informed Search Algorithm | EMV RT, SV MT | T | G |
| Shaaban et al. (2019) [72] | EMV-ROAS | DA | EMV RT, SV TT | T | G |
| Nguyen et al. (2022) [70] | EMV-ROAS | KSPA | EMV RT | L, SL, number of lanes | G |
| Su et al. (2023) [71] | EMV-ROAS | Decentralized DA | EMV RT, SV TT | T | G |
5. EMV-TPC Strategies
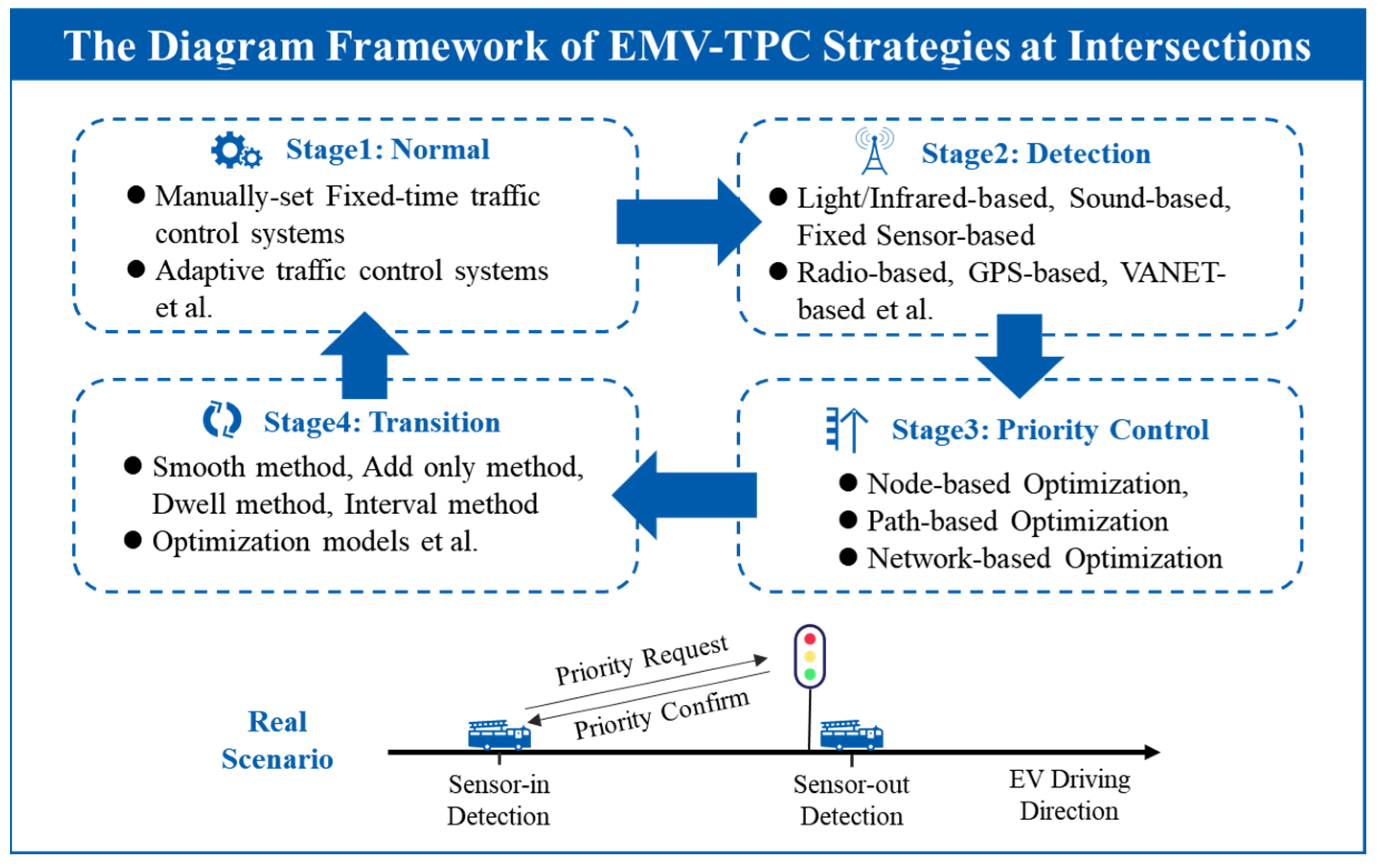
5.1. EMV-TPC at Intersections
5.1.1. Stage 1: Normal
5.1.2. Stage 2: Detection
5.1.3. Stage 3: Priority Control
5.1.4. Stage 4: Transition
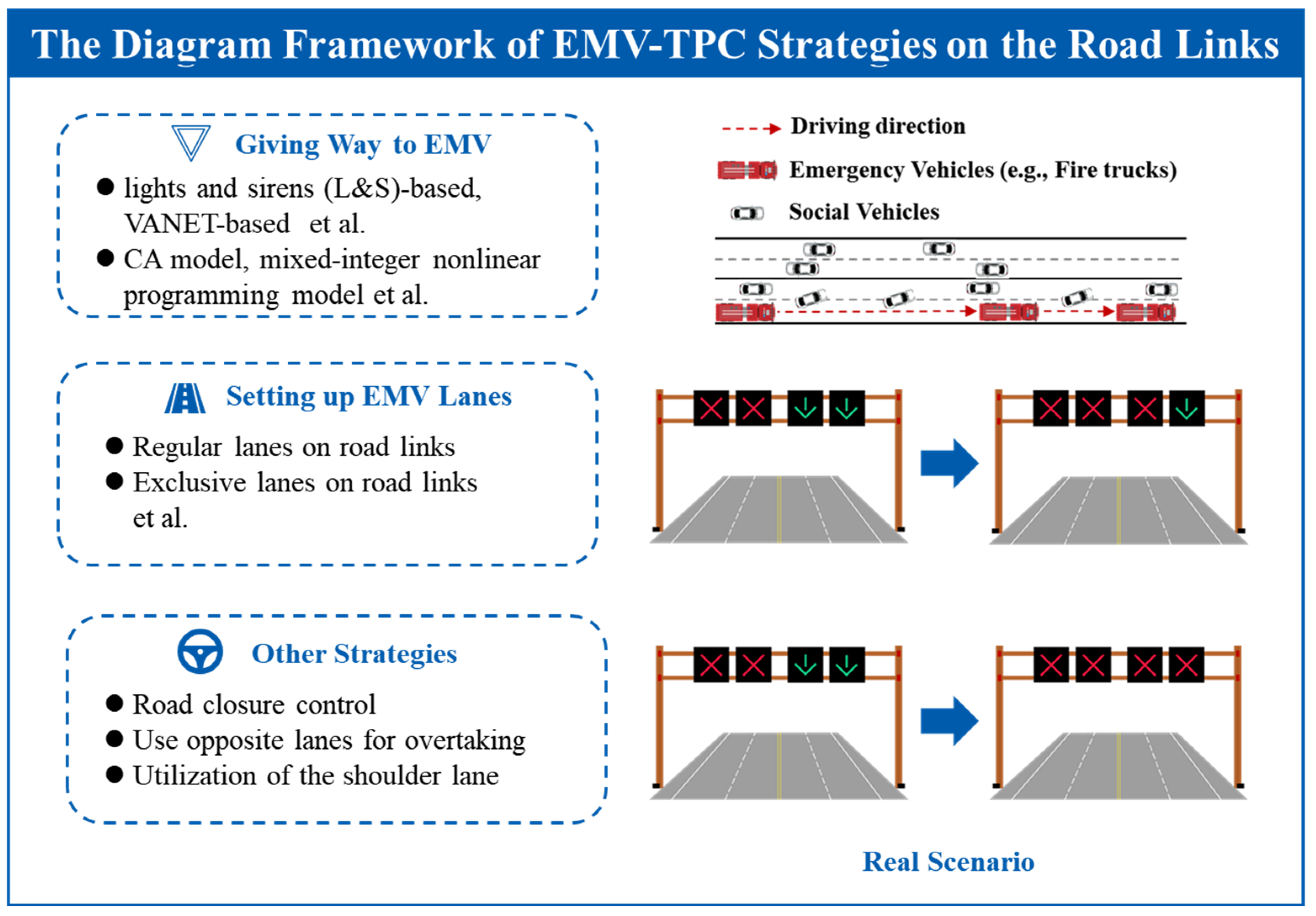
5.2. EMV-TPC on Road Links
5.2.1. Giving Way to EMVs
5.2.2. Setting up EMV Lanes
5.2.3. Other Strategies
5.3. Discussion
6. Potential Directions for Future Research
6.1. Uncovering Authentic Demand Characteristics through EMV Data Mining
6.2. Incorporating Distinct Characteristics of EMVs in EMV-RO Models
6.3. Implementing Active EMV-TPC Strategies
6.4. Concentrating More on the Negative Impacts on SVs
6.5. Embracing Emerging Technologies in the Future Traffic Environment
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yao, J.; Zhang, K.; Yang, Y.; Wang, J. Emergency Vehicle Route Oriented Signal Coordinated Control Model with Two-Level Programming. Soft Comput. 2018, 22, 4283–4294. [Google Scholar] [CrossRef]
- Jose, C.; Vijula Grace, K.S. Optimization Based Routing Model for the Dynamic Path Planning of Emergency Vehicles. Evol. Intell. 2022, 15, 1425–1439. [Google Scholar] [CrossRef]
- Al-Shaqsi, S.Z.K. Response Time as a Sole Performance Indicator in EMS: Pitfalls and Solutions. Open Access Emerg. Med. 2010, 2, 1–6. [Google Scholar] [CrossRef]
- O’Keeffe, C.; Nicholl, J.; Turner, J.; Goodacre, S. Role of Ambulance Response Times in the Survival of Patients with Out-of-Hospital Cardiac Arrest. Emerg. Med. J. 2011, 28, 703–706. [Google Scholar] [CrossRef] [PubMed]
- Lam, S.S.W.; Zhang, J.; Zhang, Z.C.; Oh, H.C.; Overton, J.; Ng, Y.Y.; Ong, M.E.H. Dynamic Ambulance Reallocation for the Reduction of Ambulance Response Times Using System Status Management. Am. J. Emerg. Med. 2015, 33, 159–166. [Google Scholar] [CrossRef] [PubMed]
- Blanes i Vidal, J.; Kirchmaier, T. The Effect of Police Response Time on Crime Clearance Rates. Rev. Econ. Stud. 2018, 85, 855–891. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.; Zhong, S.; Niu, X.; Huang, Y.; Zhang, L. Factors Influencing the Emergency Medical Service Response Time for Cardiovascular Disease in Guangzhou, China. Curr. Med. Sci. 2019, 39, 463–471. [Google Scholar] [CrossRef] [PubMed]
- Næss, L.; Krüger, A.; Uleberg, O.; Haugland, H.; Dale, J.; Watto, J.; Nilsen, S.; Asheim, A. Using Machine Learning to Assess the Extent of Busy Ambulances and Its Impact on Ambulance Response Times: A Retrospective Observational Study. PLoS ONE 2024, 19, e0296308. [Google Scholar] [CrossRef] [PubMed]
- Lam, S.S.W.; Nguyen, F.N.H.L.; Ng, Y.Y.; Lee, V.P.-X.; Wong, T.H.; Fook-Chong, S.M.C.; Ong, M.E.H. Factors Affecting the Ambulance Response Times of Trauma Incidents in Singapore. Accid. Anal Prev. 2015, 82, 27–35. [Google Scholar] [CrossRef]
- Norii, T.; Nakao, S.; Miyoshi, T.; Braude, D.; Sklar, D.P.; Crandall, C. Driving Ambulances Safely: Findings of Ten Years of Japanese Ambulance Crash Data. Prehospital Emerg. Care 2023, 27, 94–100. [Google Scholar] [CrossRef]
- Mahariba, A.J.; Uthra, R.A.; Brunet, R.G. Estimation of Shortest Route with Minimum Travel Time Using GIS and MSSTT Algorithm. In Advances in Construction Management; Loon, L.Y., Subramaniyan, M., Gunasekaran, K., Eds.; Springer Nature: Singapore, 2022; pp. 565–579. [Google Scholar]
- Ranieri, V. Methods for Infrastructure Planning in Areas Close to Hospitals at the Regional Level. Eur. Transp./Trasp. Eur. 2023, 91, 1–11. [Google Scholar] [CrossRef]
- Zhao, X.; Qian, W.; Huo, H. Multi-Objective Routing Optimization for Urban Emergency Rescue Vehicles. In Cictp 2019: Transportation in China-Connecting the World; Zhang, L., Ma, J., Liu, P., Zhang, G., Eds.; Amer Soc Civil Engineers: New York, NY, USA, 2019; pp. 3855–3866. [Google Scholar]
- Umam, M.I.H.; Santosa, B.; Siswanto, N. Minimizing Response Time in Medical Emergency Service: A Literature Review. In Proceedings of the International Conference on Industrial Engineering and Operations Management, Bandung, Indonesia, 6–8 March 2018; p. 10. [Google Scholar]
- Humagain, S.; Sinha, R.; Lai, E.; Ranjitkar, P. A Systematic Review of Route Optimisation and Pre-Emption Methods for Emergency Vehicles. Transp. Rev. 2020, 40, 35–53. [Google Scholar] [CrossRef]
- Kamble, S.J.; Kounte, M.R. A Survey on Emergency Vehicle Preemption Methods Based on Routing and Scheduling. IJCNA 2022, 9, 60. [Google Scholar] [CrossRef]
- Yu, W.; Bai, W.; Luan, W.; Qi, L. State-of-the-Art Review on Traffic Control Strategies for Emergency Vehicles. IEEE Access 2022, 10, 109729–109742. [Google Scholar] [CrossRef]
- Lakshmi, A.V.; Sekhar, P.C.; Joseph, K.S.; Priya, A.S. A Systematic Review of Route Optimization for Ambulance Routing Problem; Atlantis Press: Amsterdam, The Netherlands, 2023; pp. 294–304. [Google Scholar]
- Ghosal, S.; Chatterjee, T. Controlling Emergency Vehicles During Road Congestion—A Survey and Solution. In Advances in Intelligent Systems and Computing; Das, A.K., Nayak, J., Naik, B., Dutta, S., Pelusi, D., Eds.; Springer: Singapore, 2020; Volume 1120, pp. 529–538. [Google Scholar]
- Booth, A.; Sutton, A.; Clowes, M.; James, M.M.-S. Systematic Approaches to a Successful Literature Review; SAGE: Newcastle upon Tyne, UK, 2021; ISBN 978-1-5297-5965-5. [Google Scholar]
- Tranfield, D.; Denyer, D.; Smart, P. Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Moreno-Guerrero, A.-J.; Gómez-García, G.; López-Belmonte, J.; Rodríguez-Jiménez, C. Internet Addiction in the Web of Science Database: A Review of the Literature with Scientific Mapping. Int. J. Environ. Res. Public Health 2020, 17, 2753. [Google Scholar] [CrossRef]
- Jalali, S.; Wohlin, C. Systematic Literature Studies: Database Searches vs. Backward Snowballing. In ACM-IEEE International Symposium on Empirical Software Engineering and Measurement; ACM: Lund, Sweden, 2012; pp. 29–38. [Google Scholar]
- Kaffash, S.; Nguyen, A.T.; Zhu, J. Big Data Algorithms and Applications in Intelligent Transportation System: A Review and Bibliometric Analysis. Int. J. Prod. Econ. 2021, 231, 107868. [Google Scholar] [CrossRef]
- van Eck, N.J.; Waltman, L. Software Survey: VOSviewer, a Computer Program for Bibliometric Mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X. Trajectory and Velocity Planning Method of Emergency Rescue Vehicle Based on Segmented Three-Dimensional Quartic Bezier Curve. IEEE Trans. Intell. Transp. Syst. 2022, 24, 3461–3475. [Google Scholar] [CrossRef]
- Westgate, B.S.; Woodard, D.B.; Matteson, D.S.; Henderson, S.G. Large-Network Travel Time Distribution Estimation for Ambulances. Eur. J. Oper. Res. 2016, 252, 322–333. [Google Scholar] [CrossRef]
- Liu, J.; Li, Y.; Li, Y.; Zibo, C.; Lian, X.; Zhang, Y. Location Optimization of Emergency Medical Facilities for Public Health Emergencies in Megacities Based on Genetic Algorithm. Eng. Constr. Archit. Manag. 2023, 30, 3330–3356. [Google Scholar] [CrossRef]
- Kolesar, P.; Walker, W.; Hausner, J. Determining the Relation between Fire Engine Travel Times and Travel Distances in New York City. Oper. Res. 1975, 23, 614–627. [Google Scholar] [CrossRef]
- Budge, S.; Ingolfsson, A.; Zerom, D. Empirical Analysis of Ambulance Travel Times: The Case of Calgary Emergency Medical Services. Manag. Sci. 2010, 56, 716–723. [Google Scholar] [CrossRef]
- Højgaard, H.F.; Mikkelsen, J.; Zegers, F.; Mikkelsen, S. Response Time of Emergency Vehicles May Be Predicted Using Ordinary GPS Estimates. Dan. Med. J. 2020, 67, A02200118. [Google Scholar]
- Buzna, L.; Czimmermann, P. On the Modelling of Emergency Ambulance Trips: The Case of the Žilina Region in Slovakia. Mathematics 2021, 9, 2165. [Google Scholar] [CrossRef]
- Wang, J.; Yun, M.; Ma, W.; Yang, X. Travel Time Estimation Model for Emergency Vehicles under Preemption Control. In Proceedings of the Intelligent and Integrated Sustainable Multimodal Transportation Systems Proceedings from the 13th Cota International Conference of Transportation Professionals (cictp2013), Shenzhen, China, 13–16 August 2013; Zhang, L., Wei, H., Li, Z., Zhang, Y., Li, M., Eds.; Elsevier Science Bv: Amsterdam, The Netherlands, 2013; Volume 96, pp. 2147–2158. [Google Scholar]
- Yan, L.; Wang, P.; Yang, J.; Hu, Y.; Han, Y.; Yao, J. Refined Path Planning for Emergency Rescue Vehicles on Congested Urban Arterial Roads via Reinforcement Learning Approach. J. Adv. Transp. 2021, 2021, 8772688. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, K.; Hou, B.; Li, Q.; Feng, J.; Nguyen, T.-M.-T.; de La Fortelle, A. Real-Time Traffic Impedance and Priority Based Cooperative Path Planning Mechanism for SOC-ITS: Efficiency and Equilibrium. Simul. Model. Pract. Theory 2023, 122, 102683. [Google Scholar] [CrossRef]
- Olivier, A.; Mohammadi, S.; Smyth, A.; Adams, M. Bayesian Neural Networks with Physics-Aware Regularization for Probabilistic Travel Time Modeling. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 2614–2631. [Google Scholar] [CrossRef]
- Moussa, N. Modeling Evacuation of Emergency Vehicles by Cellular Automata Models. Int. J. Mod. Phys. C 2008, 19, 947–956. [Google Scholar] [CrossRef]
- Agarwal, A.; Paruchuri, P. V2V Communication for Analysis of Lane Level Dynamics for Better EV Traversal. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (iv), Gothenburg, Sweden, 19–22 June 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway Township, NJ, USA, 2016; Volume 2016, pp. 368–375. [Google Scholar]
- Małecki, K.; Kamiński, M.; Wąs, J. A Multi-Cell Cellular Automata Model of Traffic Flow with Emergency Vehicles: Effect of a Corridor of Life and Drivers’ Behaviour. J. Comput. Sci.-Neth. 2022, 61, 101628. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, G.; Chen, Y.; Xia, Z. Spatial Location Optimization of Fire Stations with Traffic Status and Urban Functional Areas. Appl. Spat. Anal. 2023, 16, 771–788. [Google Scholar] [CrossRef]
- Fleischman, R.J.; Lundquist, M.; Jui, J.; Newgard, C.D.; Warden, C. Predicting Ambulance Time of Arrival to the Emergency Department Using Global Positioning System and Google Maps. Prehospital Emerg. Care 2013, 17, 458–465. [Google Scholar] [CrossRef] [PubMed]
- Torres, N.; Trujillo, L.; Maldonado, Y.; Vera, C. Correction of the Travel Time Estimation for Ambulances of the Red Cross Tijuana Using Machine Learning. Comput. Biol. Med. 2021, 137, 104798. [Google Scholar] [CrossRef] [PubMed]
- Jian, L.; Li, Z.; Yang, X.; Wu, W.; Ahmad, A.; Jeon, G. Combining Unmanned Aerial Vehicles With Artificial-Intelligence Technology for Traffic-Congestion Recognition: Electronic Eyes in the Skies to Spot Clogged Roads. IEEE Consum. Electr. Mag. 2019, 8, 81–86. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Lorenz, P.; Atiquzzaman, M.; Jamalipour, A. Leveraging Communicating UAVs for Emergency Vehicle Guidance in Urban Areas. IEEE Trans. Emerg. Topics Comput. 2021, 9, 1070–1082. [Google Scholar] [CrossRef]
- Yu, Y.-C.; Gardoni, P. Predicting Road Blockage Due to Building Damage following Earthquakes. Reliab. Eng. Syst. Saf. 2022, 219, 108220. [Google Scholar] [CrossRef]
- Chowdhury, A.; Kaisar, S.; Khoda, M.E.; Naha, R.; Khoshkholghi, M.A.; Aiash, M. IoT-Based Emergency Vehicle Services in Intelligent Transportation System. Sensors 2023, 23, 5324. [Google Scholar] [CrossRef]
- Almasoud, A.M. UAV-Based Intelligent Transportation System for Emergency Reporting in Coverage Holes of Wireless Networks. Sensors 2021, 21, 6371. [Google Scholar] [CrossRef] [PubMed]
- Lemayian, J.P.; Hamamreh, J.M. First Responder Drones for Critical Situation Management. In Proceedings of the 2019 Innovations in Intelligent Systems and Applications Conference (Asyu), Izmir, Turkey, 31 October–2 November 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway Township, NJ, USA, 2019. [Google Scholar]
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Baz, A.; Alhakami, H. SEARCH: An SDN-Enabled Approach for Vehicle Path-Planning. IEEE Trans. Veh. Technol. 2020, 69, 14523–14536. [Google Scholar] [CrossRef]
- Beg, A.; Qureshi, A.R.; Sheltami, T.; Yasar, A. UAV-Enabled Intelligent Traffic Policing and Emergency Response Handling System for the Smart City. Pers. Ubiquitous Comp. 2021, 25, 33–50. [Google Scholar] [CrossRef]
- Koski, A.; Sumanen, H. The Risk Factors Finnish Paramedics Recognize When Performing Emergency Response Driving. Accid. Anal. Prev. 2019, 125, 40–48. [Google Scholar] [CrossRef]
- Zhang, Z.; He, Q.; Gou, J.; Li, X. Analyzing Travel Time Reliability and Its Influential Factors of Emergency Vehicles with Generalized Extreme Value Theory. J. Intell. Transport. Syst. 2019, 23, 1–11. [Google Scholar] [CrossRef]
- Nordin, N.A.M.; Zaharudin, Z.A.; Maasar, M.A.; Nordin, N.A. Finding Shortest Path of the Ambulance Routing: Interface of A Algorithm Using C# Programming. In Proceedings of the 2012 IEEE Symposium on Humanities, Science and Engineering Research, Kuala Lumpur, Malaysia, 24–27 June 2012; pp. 1569–1573. [Google Scholar]
- Constantinescu, V.; Pătrașcu, M. Performance Analysis of Genetic Algorithms for Route Computation Applied to Emergency Vehicles in Uncertain Traffic. UPB Sci. Bull. Ser. C Electr. Eng. Comput. Sci. 2020, 82, 167–178. [Google Scholar]
- Derekenaris, G.; Garofalakis, J.; Makris, C.; Prentzas, J.; Sioutas, S.; Tsakalidis, A. Integrating GIS, GPS and GSM Technologies for the Effective Management of Ambulances. Comput. Environ. Urban Syst. 2001, 25, 267–278. [Google Scholar] [CrossRef]
- Al Mustafid, G.F.; Kristalina, P.; Astawa, I.G.P. Towards Shortest Path Finding System Using Fuzzy-Dijkstra Method for Emergency Routing Problem. In Proceedings of the 2022 International Electronics Symposium (IES), Surabaya, Indonesia, 9–11 August 2022; pp. 236–241. [Google Scholar]
- Musolino, G.; Polimeni, A.; Rindone, C.; Vitetta, A. Travel Time Forecasting and Dynamic Routes Design for Emergency Vehicles. Procedia-Soc. Behav. Sci. 2013, 87, 193–202. [Google Scholar] [CrossRef]
- Zhao, J.; Guo, Y.; Duan, X. Dynamic Path Planning of Emergency Vehicles Based on Travel Time Prediction. J. Adv. Transp. 2017, 2017, e9184891. [Google Scholar] [CrossRef]
- Hu, X.-B.; Zhang, M.-K.; Zhang, Q.; Liao, J.-Q. Co-Evolutionary Path Optimization by Ripple-Spreading Algorithm. Transp. Res. Part B Methodol. 2017, 106, 411–432. [Google Scholar] [CrossRef]
- Fu, H.; Zhang, Z.; Hu, G. Developing a Model for the Emergency Rescue Routing Problem Using Stochastic Programming Theory. In Proceedings of the 2010 International Conference on Logistics Engineering and Intelligent Transportation Systems, Wuhan, China, 26–28 November 2010; pp. 67–70. [Google Scholar]
- Wang, C.; Fu, H.; Hu, G. Optimal Emergency Rescue Route for Traffic Accident Considering Variable Travel Time. In Proceedings of the 2013 6th International Conference on Information Management, Innovation Management and Industrial Engineering, ICIII, Xi’an, China, 23–24 November 2013; Volume 2, pp. 463–466. [Google Scholar]
- Chen, S.S.; Zhao, X.; Sheng, Y. Research on Dynamic Route Guidance for an Emergency Vehicle Considering the Intersection Delay. AMM 2014, 641–642, 848–852. [Google Scholar] [CrossRef]
- Amer, H.M.; Al-Kashoash, H.A.A.; Kemp, A.; Mihaylova, L.; Mayfield, M. Coalition Game for Emergency Vehicles Re-Routing in Smart Cities. In Proceedings of the 2018 Ieee 10th Sensor Array and Multichannel Signal Processing Workshop (sam), Sheffield, UK, 8–11 July 2018; IEEE: New York, NY, USA, 2018; pp. 306–310. [Google Scholar]
- Wang, Z.; Zlatanova, S. Safe Route Determination for First Responders in the Presence of Moving Obstacles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1044–1053. [Google Scholar] [CrossRef]
- Duan, X.H.; Wu, J.X.; Xiong, Y.L. Dynamic Emergency Vehicle Path Planning and Traffic Evacuation Based on Salp Swarm Algorithm. J. Adv. Trans. 2022, 2022, 7862746. [Google Scholar] [CrossRef]
- Heda, M.; Sophie Busch, J.; Aziz Sepa Seid Mayo, A.; Ermakova, T. RescueRoute: Using Real-Time Traffic Data for Routing Emergency Vehicles. In Proceedings of the 2023 IEEE/WIC International Conference on Web Intelligence and Intelligent Agent Technology (WI-IAT), Venice, Italy, 26–29 October 2023; pp. 362–366. [Google Scholar]
- Wen, H.; Wu, J.; Duan, Y.; Qi, W.; Zhao, S. A Methodology of Timing Co-Evolutionary Path Optimization for Accident Emergency Rescue Considering Future Environmental Uncertainty. IEEE Access 2019, 7, 131459–131472. [Google Scholar] [CrossRef]
- Gedawy, H.K. Dynamic Path Planning and Traffic Light Coordination for Emergency Vehicle Routing. Comp. Sci. Dept. 2008, 189, 1–9. [Google Scholar]
- Kwon, T.M.; Kim, S. Development of Dynamic Route Clearance Strategies for Emergency Vehicle Operations, Phase I. 2003. Available online: https://conservancy.umn.edu/handle/11299/915 (accessed on 1 February 2024).
- Nguyen, V.-L.; Hwang, R.-H.; Lin, P.-C. Controllable Path Planning and Traffic Scheduling for Emergency Services in the Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 12399–12413. [Google Scholar] [CrossRef]
- Su, H.; Zhong, Y.D.; Chow, J.Y.J.; Dey, B.; Jin, L. EMVLight: A Multi-Agent Reinforcement Learning Framework for an Emergency Vehicle Decentralized Routing and Traffic Signal Control System. Transp. Res. C-Emer. 2023, 146, 103955. [Google Scholar] [CrossRef]
- Shaaban, K.; Khan, M.A.; Hamila, R.; Ghanim, M. A Strategy for Emergency Vehicle Preemption and Route Selection. Arab. J. Sci. Eng. 2019, 44, 8905–8913. [Google Scholar] [CrossRef]
- Dutta, P.; Khatua, S.; Choudhury, S. Fast Move: A Prioritized Vehicle Rerouting Strategy in Smart City. Veh. Commun. 2023, 44, 100666. [Google Scholar] [CrossRef]
- Hussein, T.D.H.; Frikha, M.; Ahmed, S.; Rahebi, J. Ambulance Vehicle Routing in Smart Cities Using Artificial Neural Network. In Proceedings of the 2022 6th International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Sfax, Tunisia, 24–27 May 2022; pp. 1–6. [Google Scholar]
- Wen, H.; Lin, Y.; Wu, J. Co-Evolutionary Optimization Algorithm Based on the Future Traffic Environment for Emergency Rescue Path Planning. IEEE Access 2020, 8, 148125–148135. [Google Scholar] [CrossRef]
- Rosayyan, P.; Subramaniam, S.; Ganesan, S.I. Decentralized Emergency Service Vehicle Pre-Emption System Using RF Communication and GNSS-Based Geo-Fencing. IEEE Trans. Intell. Transp. 2021, 22, 7726–7735. [Google Scholar] [CrossRef]
- Huang, Y.-S.; Weng, Y.-S.; Zhou, M. Design of Traffic Safety Control Systems for Emergency Vehicle Preemption Using Timed Petri Nets. IEEE Trans. Intell. Transp. 2015, 16, 2113–2120. [Google Scholar] [CrossRef]
- Qin, X.; Khan, A.M. Control Strategies of Traffic Signal Timing Transition for Emergency Vehicle Preemption. Transp. Res. C-Emer. 2012, 25, 1–17. [Google Scholar] [CrossRef]
- Zhong, L.; Chen, Y. A Novel Real-Time Traffic Signal Control Strategy for Emergency Vehicles. IEEE Access 2022, 10, 19481–19492. [Google Scholar] [CrossRef]
- Shibuya, S.; Yoshida, T.; Yamashiro, Z.; Miyawaki, M. Fast Emergency Vehicle Preemption Systems. Transp. Res. Rec. 2000, 1739, 44–50. [Google Scholar] [CrossRef]
- Patel, R.; Mange, S.; Mulik, S.; Mehendale, N. AI Based Emergency Vehicle Priority System. Ccf. T Pervas. Comput. 2022, 4, 285–297. [Google Scholar] [CrossRef]
- Weng, Y.-S.; Huang, Y.-S.; Su, S.-F.; Yu, C.-S. Modelling of Emergency Vehicle Preemption Systems Using Statecharts. In Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; IEEE: Anchorage, AK, USA, 2011; pp. 556–561. [Google Scholar]
- Unibaso, G.; Del Ser, J.; Gil-Lopez, S.; Molinete, B. A Novel CAM-Based Traffic Light Preemption Algorithm for Efficient Guidance of Emergency Vehicles. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 74–79. [Google Scholar]
- Humayun, M.; Almufareh, M.F.; Jhanjhi, N.Z. Autonomous Traffic System for Emergency Vehicles. Electronics 2022, 11, 510. [Google Scholar] [CrossRef]
- Jagadeesan, J.; Azhagiri, M.; Maheshraj, R.P.; Sanjay, B.; Srikanth, T. Control System for Smart Traffic Signal Using LTE, GPS, RFID for Ambulance. Int. J. Innov. Technol. Explor. Eng. 2019, 9, 812–815. [Google Scholar] [CrossRef]
- Cao, M.; Li, V.O.K.; Shuai, Q. A Gain With No Pain: Exploring Intelligent Traffic Signal Control for Emergency Vehicles. IEEE Trans. Intell. Transp. 2022, 23, 17899–17909. [Google Scholar] [CrossRef]
- Rosayyan, P.; Paul, J.; Subramaniam, S.; Ganesan, S.I. An Optimal Control Strategy for Emergency Vehicle Priority System in Smart Cities Using Edge Computing and IOT Sensors. Meas. Sens. 2023, 26, 100697. [Google Scholar] [CrossRef]
- Mu, H.; Liu, L.; Song, Y.; Wang, N. Control Strategy of Signal Transition after Emergency Vehicle Signal Preemption. Discret. Dyn. Nat. Soc. 2020, 2020, e1382415. [Google Scholar] [CrossRef]
- Kang, W.; Xiong, G.; Lv, Y.; Dong, X.; Zhu, F.; Kong, Q. Traffic signal coordination for emergency vehicles. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), IEEE, Qingdao, China, 8–11 October 2014; pp. 157–161. [Google Scholar] [CrossRef]
- Mu, H.; Song, Y.; Liu, L. Route-Based Signal Preemption Control of Emergency Vehicle. J. Control. Sci. Eng. 2018, 2018, 1024382. [Google Scholar] [CrossRef]
- Petrică, B.-G.; Ciobanu, R.-I.; Dobre, C. Automatic Traffic Light Preemption for Intelligent Transportation Systems. In Proceedings of the 2021 20th International Symposium on Parallel and Distributed Computing (ISPDC), Cluj-Napoca, Romania, 28–30 July 2021; pp. 1–8. [Google Scholar]
- Nelson, E.J.; Bullock, D. Impact of Emergency Vehicle Preemption on Signalized Corridor Operation: An Evaluation. Transp. Res. Rec. 2000, 1727, 1–11. [Google Scholar] [CrossRef]
- Xu, J.; Tian, Z.; Wang, A. Evaluating the Impacts of Different Exit Strategies of Emergency Vehicle Preemption on Arterial Signal Coordination: A Case Study in Reno, Nevada. J. Transp. Eng. Part A Syst. 2023, 149, 05023007. [Google Scholar] [CrossRef]
- Petrov, T.; Pocta, P.; Roman, J.; Buzna, Ľ.; Dado, M. A Feasibility Study of Privacy Ensuring Emergency Vehicle Approaching Warning System. Appl. Sci. 2020, 10, 298. [Google Scholar] [CrossRef]
- Osman, R.A.; Zaki, A.I.; Abdelsalam, A.K. Novel Road Traffic Management Strategy for Rapid Clarification of the Emergency Vehicle Route Based on V2V Communications. Sensors 2021, 21, 5120. [Google Scholar] [CrossRef]
- Wu, J.; Kulcsár, B.; Ahn, S.; Qu, X. Emergency Vehicle Lane Pre-Clearing: From Microscopic Cooperation to Routing Decision Making. Transp. Res. Part B Methodol. 2020, 141, 223–239. [Google Scholar] [CrossRef]
- Zhao, H.-T.; Mao, H.-Y.; Huang, R.-J. Cellular Automaton Models for Mixed Traffic Flow Considering Passage Way of Emergency Vehicle. Mod. Phys. Lett. B 2013, 27, 1350052. [Google Scholar] [CrossRef]
- Lin, P.; Chen, Z.; Pei, M.; Ding, Y.; Qu, X.; Zhong, L. Multiple Emergency Vehicle Priority in a Connected Vehicle Environment: A Cooperative Method. IEEE Trans. Intell. Transp. Syst. 2024, 25, 173–188. [Google Scholar] [CrossRef]
- Cortés, C.E.; Stefoni, B. Trajectory Simulation of Emergency Vehicles and Interactions with Surrounding Traffic. J. Adv. Transp. 2023, 2023, e5995950. [Google Scholar] [CrossRef]
- Xie, Z.; Jin, H.; Teng, J.; Yang, X. Design and Management of Multi-Functional Exclusive Lane for the Integrated Service to Various Vehicles with Priority. Ksce. J. Civ. Eng. 2022, 26, 882–892. [Google Scholar] [CrossRef]
- Cetin, M.; Jordan, C.A. Making Way for Emergency Vehicles at Oversaturated Signals under Vehicle-to-Vehicle Communications. In Proceedings of the 2012 IEEE International Conference on Vehicular Electronics and Safety (ICVES 2012), Istanbul, Turkey, 24–27 July 2012; pp. 279–284. [Google Scholar]
- Agrawal, S.; Maheshwari, P. Controlling of Smart Movable Road Divider and Clearance Ambulance Path Using IOT Cloud. In Proceedings of the 2021 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 27–29 January 2021; pp. 1–4. [Google Scholar]
- Zhao, H.-T.; Li, J.-R.; Nie, C. Cellular Automaton Models for Traffic Flow Considering Opposite Driving of an Emergency Vehicle. Int. J. Mod. Phys. C 2015, 26, 1550079. [Google Scholar] [CrossRef]
- Wang, H.; Xiao, L.; Chen, Z. Flexible Emergency Vehicle Network Design Considering Stochastic Demands and Inverse-Direction Lanes. J. Adv. Transp. 2018, 2018, 2524838. [Google Scholar] [CrossRef]
- Wang, J.; Ma, W.; Yang, X. Development of Degree-of-Priority Based Control Strategy for Emergency Vehicle Preemption Operation. Discret. Dyn. Nat. Soc. 2013, 2013, 283207. [Google Scholar] [CrossRef]
- Apiratwarakul, K.; Phungoen, P.; Cheung, L.W.; Tiamkao, S.; Suzuki, T.; Pearkao, C.; Ienghong, K. Optimizing Operation Time and Travel Distance for Motorcycle Ambulances in Emergency Medical Services. Prehospital Disaster Med. 2023, 38, 88–94. [Google Scholar] [CrossRef]
- Li, J.; Qiu, C.; Peng, L.; Qiu, T.Z. Signal Priority Request Delay Modeling and Mitigation for Emergency Vehicles in Connected Vehicle Environment. Transp. Res. Rec. 2018, 2672, 45–57. [Google Scholar] [CrossRef]
- Rosayyan, P.; Paul, J.; Subramaniam, S.; Ganesan, S.I. Reinforcement Learning Based Control Scheme for Emergency Vehicle Preemption with Edge Computing. Int. J. Intell. Transp. 2022, 21, 48–62. [Google Scholar] [CrossRef]
- Alzubaidi, A.; Sumaiti, A.A.; Byon, Y.-J.; Hosani, K.A. Emergency Vehicle Aware Lane Change Decision Model for Autonomous Vehicles Using Deep Reinforcement Learning. IEEE Access 2023, 11, 27127. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Y.; Yin, W. Using CVIS to Process the Concurrent Signal Priority Requirements: A Cooperative Optimization Model and Its Hardware-in-the-Loop Field Tests. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 6–10. [Google Scholar]
- He, Q.; Head, K.L.; Ding, J. Multi-Modal Traffic Signal Control with Priority, Signal Actuation and Coordination. Transp. Res. C-Emer. 2014, 46, 65–82. [Google Scholar] [CrossRef]
- van der Pols, H.; Mencl, F.; de Vos, R. The Impact of an Emergency Motorcycle Response Vehicle on Prehospital Care in an Urban Area. Eur. J. Emerg. Med. 2011, 18, 328. [Google Scholar] [CrossRef]


| Component | Search Strings in WoS |
|---|---|
| EMV-TTP | (TOPIC: “Emergency Vehicle*” OR “Rescue Vehicle” OR “Ambulance” OR “Fire Truck” OR “Police Car” OR “First Responder” OR “Privileged Vehicle” OR “Fire Engine”) AND (TOPIC: “Response Time” OR “Travel Time”) AND (TOPIC: “Estimat*” OR “Predict*” OR “Forecast*”) |
| EMV-RO EMV-TPC | (TOPIC: “Emergency Vehicle*” OR “Rescue Vehicle” OR “Ambulance” OR “Fire Truck” OR “Police Car” OR “First Responder” OR “Privileged Vehicle” OR “Fire Engine”) AND (TOPIC: “Path Optimization” OR “Route Planning” OR “Path Planning” OR “Traffic Signal” OR “Path Selection” OR “Fastest Path” OR “Shortest Path” OR “Route Optimization” OR “Pre-emption” OR “Pre-Emption” OR “Intelligent” OR “Connected” OR “Traffic Control” OR “Vehicle-to-Vehicle” OR “Connected Infrastructure” OR “Give Way” OR “Give the Way” OR “Lane*” OR “Exclusive Lane”) |
| Inclusion Criteria | Exclusion Criteria |
|---|---|
|
|
| Author (Year) | Control Range | Detection | Priority Techniques | Negative Impact | T.A. | C.D. | R.O. |
|---|---|---|---|---|---|---|---|
| Unibaso et al. (2010) [83] | Node | Radio, GPS | SPC | No | No | No | G |
| Weng et al. (2011) [82] | Node | Fixed Sensors | SPC | No | Yes | No | G |
| Li et al. (2018) [107] | Node | VANET (Field Test) | SPC | No | No | Yes | G |
| Jagadeesan et al. (2019) [85] | Node | RFID, GPS, LTE | SPC | No | No | No | A |
| Mu et al. (2020) [88] | Node | VANET (Numerical) | SPC | SV PC | Yes | No | G |
| Rosayyan et al. (2022) [108] | Node | VANET (Matlab), EC | SPC | No | No | Yes | G |
| Humayun et al. (2022) [84] | Node | 5G, GPS, IoT, CC | SPC, SL | SV TT | No | No | G |
| Rosayyan et al. (2023) [87] | Node | GPS, IoT, EC | SPC | SV Waiting Time | No | Yes | G |
| Zhao et al. (2015) [103] | Link | Numerical Simulation | Opposite Lane | No | No | No | G |
| Agarwal and Paruchuri (2016) [38] | Link | VANET (SUMO) | GWE | SV DT | No | No | G |
| Wu et al. (2020) [96] | Link | VANET (Numerical) | GWE | No | No | No | G |
| Osman et al. (2021) [95] | Link | VANET (Matlab, NS-2) | GWE | No | No | Yes | G |
| Alzubaidi et al. (2023) [109] | Link | VANET (Numerical) | GWE | No | No | No | G |
| Shibuya et al. (2000) [80] | Path | Infrared Beacon | SPC | No | No | No | G |
| Nelson and Bullock (2000) [92] | Path | Not Mentioned | SPC | S’ TT | Yes | No | G |
| Qin and Khan (2012) [78] | Path | VANET (Matlab) | SPC | SV Queue Length | Yes | No | G |
| Wang et al. (2013a) [105] | Path | VANET (CA) | GW, EMV Lane et al. | SV TT and DT | No | No | G |
| Yang et al. (2014) [110] | Path | VANET (HIL) | SPC | SV DT | No | No | G |
| He et al. (2014) [111] | Path | VANET (VISSIM) | SPC | SV DT et al. | No | No | G |
| Yao et al. (2018) [1] | Path | VANET (VISSIM) | GW | SV DT | No | No | G |
| Mu et al. (2018) [90] | Path | Fixed Sensors | SPC | SV PC | No | No | G |
| Patel et al. (2022) [81] | Path | Acoustics, IoT, GPS | EMV Lane | No | No | No | G |
| Petrică et al. (2021) [91] | Network | VANET (Sim2Car) | SPC | SV TT et al. | No | No | G |
| Zhong and Chen (2022) [79] | Network | VANET (SUMO) | SPC | SV Waiting Time | Yes | No | G |
| Cao et al. (2022) [86] | Network | VANET (SUMO) | SPC | SV Queue Length et al. | No | No | G |
| Su et al. (2023) [71] | Network | VANET (SUMO) | SPC, EMV Lane | SV Average TT | No | No | G |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, Z.; Wang, Y.; Yang, X. Every Second Counts: A Comprehensive Review of Route Optimization and Priority Control for Urban Emergency Vehicles. Sustainability 2024, 16, 2917. https://doi.org/10.3390/su16072917
Hao Z, Wang Y, Yang X. Every Second Counts: A Comprehensive Review of Route Optimization and Priority Control for Urban Emergency Vehicles. Sustainability. 2024; 16(7):2917. https://doi.org/10.3390/su16072917
Chicago/Turabian StyleHao, Zhengbo, Yizhe Wang, and Xiaoguang Yang. 2024. "Every Second Counts: A Comprehensive Review of Route Optimization and Priority Control for Urban Emergency Vehicles" Sustainability 16, no. 7: 2917. https://doi.org/10.3390/su16072917
APA StyleHao, Z., Wang, Y., & Yang, X. (2024). Every Second Counts: A Comprehensive Review of Route Optimization and Priority Control for Urban Emergency Vehicles. Sustainability, 16(7), 2917. https://doi.org/10.3390/su16072917