1. Introduction
Distributed generations (DGs) are capable of providing reliable electric power with a reasonable control ability to meet energy demands. It is apparent that microgrids have higher security and reliability as compared with traditional power grids, such as control flexibility and offering higher power quality to consumers [
1]. As microgrids provide several advantages over traditional power grids, researchers have been working on better control mechanisms for different rated values of DGs [
2,
3,
4,
5]. It is well known that more renewable energy resources are integrated into power grids to achieve less carbon emissions worldwide.
DG inverter controls in microgrid systems can be categorized as centralized and decentralized controls [
6]. In a decentralized control, each DG unit is connected to an inverter that has its own dedicated controller and the feeder line impedance depends on the distance from the DG source to the point of common coupling (PCC). For better power sharing between DGs, the mismatch in feeder line impedances needs to be treated using a control based on the virtual impedance loop, as suggested in [
7]. Virtual impedance only needs to be applied in low-voltage microgrids, in which the ratio of reactance to resistance (X/R) or the impedance ratio is usually higher. However, in microgrids with a high impedance ratio, there can be a cross coupling between the active power and reactive power, leading to a power system with an unstable condition [
8], which is not suitable for the DG configuration. The basic function of virtual impedance is to manage frequency deviation, voltage stability and load power sharing when there are several DG inverters connected in parallel in a microgrid system [
7,
9,
10]. To design virtual impedance, the rated power capacity and power decoupling for each DG and the power at the PCC are taken into account with inductive and resistive line impedances in the microgrids [
11].
Usually, virtual impedance is used in systems with a stationary behavior to extend the transient power regulation due to the systems’ inability to share equal power between the DGs [
12]. Virtual impedance in microgrids can be applied for voltage-source converters (VSCs) or current-source converters (CSCs) for power flow control, unbalanced-harmonics compensation and ancillary services, which are needed due to mismatched line impedances [
11,
13,
14]. Generally, DG inverters are based on the VSC model, which is suitable for developing virtual impedance control. Two types of strategies, which are a strategy based on the proportional relation [
15,
16] and a filter-based strategy using the feedback response of the output filter, have been taken into consideration [
17,
18]. It is reported in a number of publications that virtual impedance is affected by time delay and control complexity due to the dependency on the structure of virtual impedance and the pulse-width modulation (PWM) switching pattern [
14,
17] applied in current and voltage control loops in most control schemes [
19,
20].
Model predictive control (MPC) in power electronic converters has been investigated as an alternative for removing the complex multi-looped-based voltage and current controller, as well as for controlling the flexibility and expandability of the inverter switching operation. MPC, based on the finite control set (FCS), is currently used extensively in inverter control approaches in order to enhance the dynamic performance of systems. As is known, the control technique based on FCS-MPC is implemented without using any external PWM switching, and the inner current-control loop is not necessarily required for output voltage control. Moreover, the FCS-MPC formulation is simple to implement and provides a fast dynamic response when applied in inverter-based microgrids [
21,
22]. The performance of FCS-MPC for parallel-connected inverters in microgrids in the decentralized control mode using virtual impedance has also been investigated, where a fixed/static virtual impedance (SVI) was added to the system, as suggested in [
23,
24]. The SVI can ensure power sharing accuracy and voltage compensation at the PCC if the feeder line impedances are equal, but in the case of mismatched line impedances, the accuracy as per connected load/loads is not guaranteed. The voltage deviation in a system with mismatched feeder line impedances with the addition of the SVI keeps increasing when more loads are added [
25,
26,
27].
This paper focuses on the designing of a controller for a DG inverter circuit with mismatched feeder line impedances in order to ensure power sharing accuracy and voltage magnitude compensation at the PCC using the virtual impedance loop with MPC for the generation of switching vectors. The proposed control strategy combines the predictive control scheme with the voltage error algorithm of the MPC’s cost function to create a new reference voltage based on the virtual impedance strategy. Furthermore, the use of adaptive virtual impedance (AVI) is for regulating power sharing between DGs, as well as ensuring voltage stability at the PCC during load changes. The overall control scheme is modeled in the decentralized DG inverter mode in order to avoid miscommunication among the DGs. The controller has two parts, which are the AVI and the FCS-MPC mechanism, in order for it to become an adaptive controller. The contribution of the AVI is to generate the reference voltage based on mismatched line impedances in combination with droop power sharing control as the input for the AVI for high-vector MPC switching to compensate for the fast transience of the voltage at the PCC.
Moreover, it is a dream of authors to see that this controller can be applied in local grid networks. As is known, in the future, an electrical grid network will be localized generation, where energy generation comes from residential energy generation, low-rated solar farm networks, fast-charging stations and portable energy storages that are placed in local communities to create a nano-grid system. This will create continuous and sustainable energy generation and at the same time will increase the awareness of having responsible communities for the environment and will provide a green living condition.
This paper is divided into several sections.
Section 1 presents the overview of a microgrid system and control schemes based on the virtual impedance loop, as well as the MPC and issues of power sharing between DGs with different line impedances. In
Section 2, the LC filter and inverter voltage control loop based on the transfer function model are referenced for vector control switching. The proposed AVI-based reference voltage for mismatched feeder impedances and the cost function for the MPC’s voltage error generation are given in
Section 3 and
Section 4, respectively.
Section 5 provides the parameter data for the simulation experiment for the DGs used, along with load values and load transition times. The results and discussion are given in
Section 6, where the PCC voltage stability and power sharing capability for the AVI-based and SVI-based control schemes are compared for efficiency evaluation. This paper will not discuss the SVI-based controller’s formulation because it has been explained in detail in [
15]. This paper ends with the conclusion in
Section 7 on whether the proposed controller can be helpful to future energy communities.
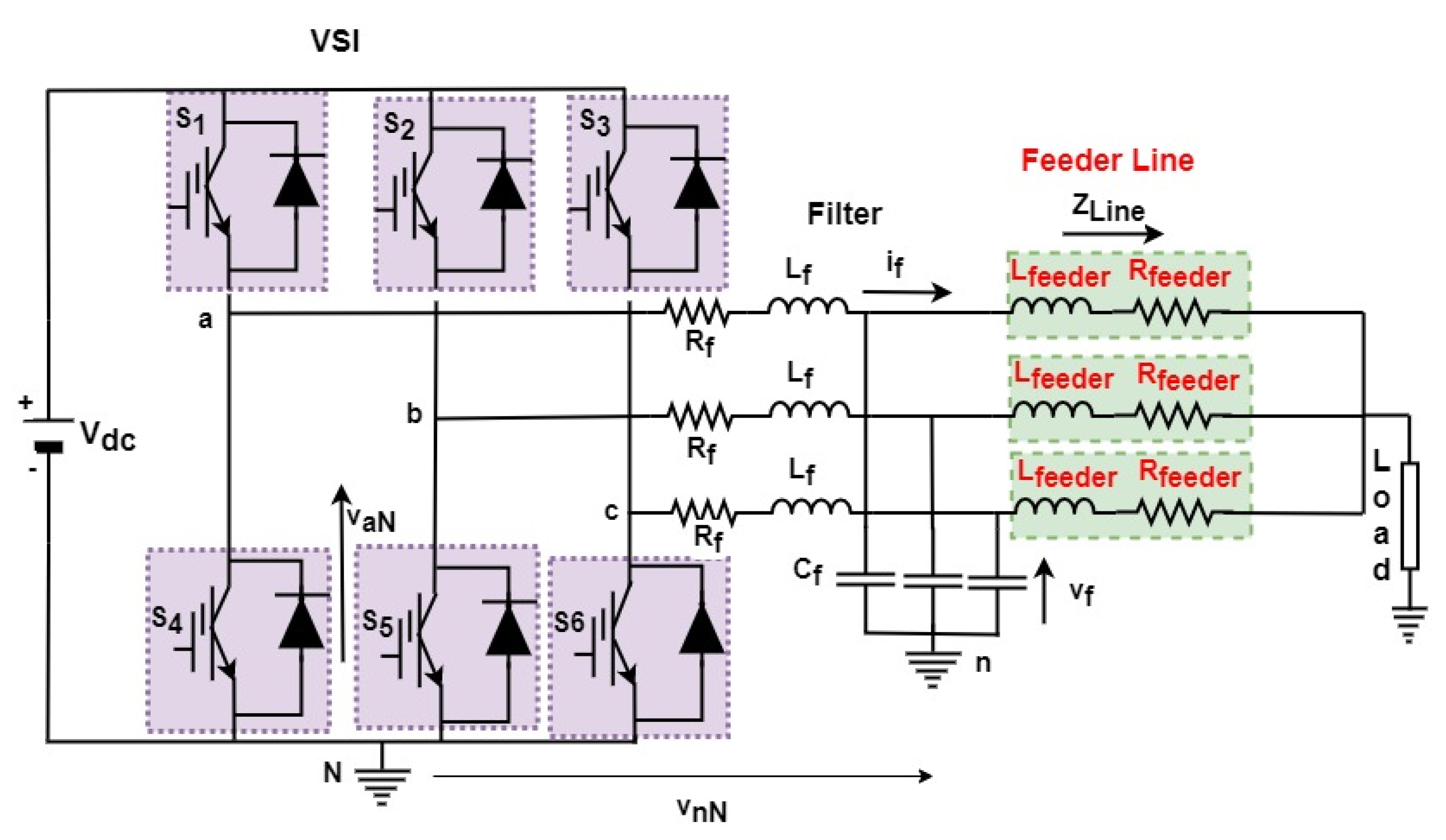
2. LC Filter and Voltage Loop Transfer Function with Switching Voltage Vectors
An LC filter was used to improve the quality of the voltage output, which is a part of the inverter control’s transfer function for the VSC model, as shown in
Figure 1 and
Figure 2 with the new reference voltage
. The filter voltage’s input and output
filter and output current
and
voltage at the LC filter can be expressed as in the
transformation to simplify the three-phase circuit to represent a single-circuit diagram:
From the Clarke transformation,
in Equation (1) are expressed as follows:
Considering the rate of change of the current and voltage in the
-reference frame:
where
are the capacitance and inductance in the filter circuit, respectively. In the state-space form, Equations (2) and (3) are expressed as follows:
where
A and
B are given as the following:
The inverter voltage can be obtained by subtracting the common voltage from the voltage in each phase, as shown in Equation (5):
The inverter voltage in the matrix calculations can be represented as follows:
where
I is the identity matrix, 1 is an all-ones matrix and
S is the switching action of the inverter.
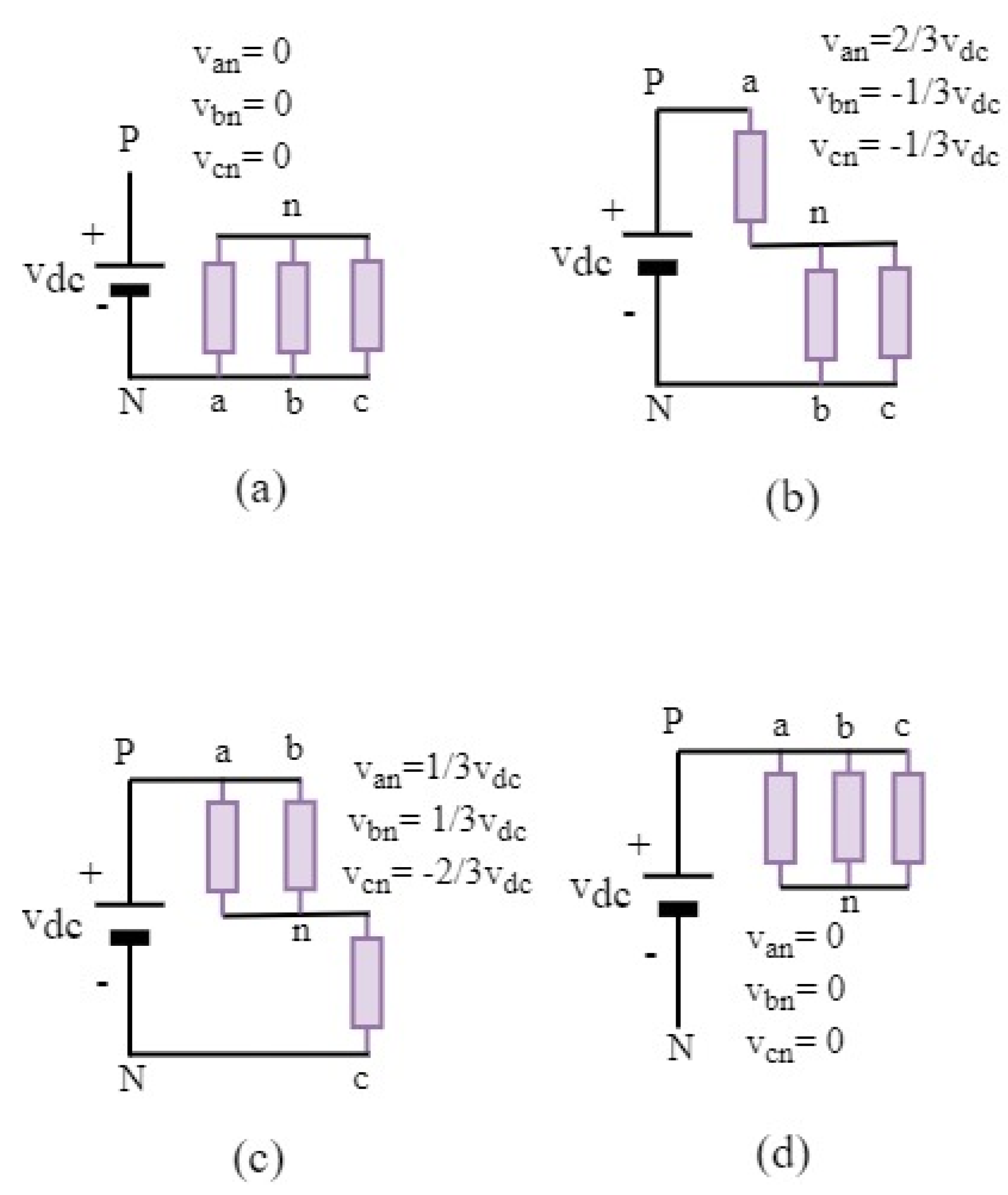
Here, the inverter input voltage (
) is attained from the switching vectors. The switching arrangements from three gate signals comprise “0” and “1” to produce (2)
3 switching signals as the output of the inverter voltage [
25] for the generation of the switching pattern, given as follows:
The product of
and
(DC source voltage) with respect to point
N computes the values for
and
, as given below:
The output voltage vector is obtained from the consideration of unitary vector “
a”, which also characterizes a phase shift of 120° between phases. Vector “
a” is defined as follows:
So, the output voltage can be calculated as follows:
where
are phase-to-neutral voltages that are associated with the inverter.
Figure 1 shows the inverter voltage with switching.
From
, the voltage vector is generated. For
, the voltage vector
is generated. Computing the values of
, the voltage vector is calculated as follows:
Similarly, for
, taking
, the voltage vector is calculated as follows:
For
, taking
, the voltage vector is calculated as follows:
So, for all possible number of switching states, which is
, all voltage vectors are calculated. It is worth mentioning here that
for switching states
. The finite sets of seven different voltage vectors are obtained from the switching states, which are given in
Table 1:
The state-space model of the LC filter given in Equation (4) is converted into discrete time by using the zero-order hold (ZOH) [
26] for discrete sampling for the vector pattern. Equation (8) is the discrete-time representation of Equation (4):
where
,
and
is the sampling time of 12 × 10
−6. The switching sequence generates the signal for the inverter, which will be utilized in the FCS-MPC vector control operation.
3. Modeling of Adaptive Virtual Impedance (AVI) in a System with Mismatched Feeder Impedances
The resistance, inductance and capacitance values for the line impedance were calculated as 0.1 Ω, 3.3 mH and 20 μF, respectively. For the inverter switching operation, the switching frequency (
fsw) was 20 kHz, while the cut-off frequency (
fCF) of the LC filter was 2 kHz, based on 10% switching from the switching frequency selected. The
P and
Q control in the conventional droop theory employed the power control input for the AVI, which was based on the decentralized inverter control. The voltage and frequency droop equations are given as follows:
For an islanded microgrid, the reference active power and reference reactive power (
Pref and
Qref) are taken as 0 for power sharing accuracy. Therefore, Equations (9) and (10) can be written as follows:
In Equations (11) and (12),
are droop coefficients. As explained earlier, the parallel inverters, the conventional droop control and the voltage should correspond to any changes in
P and
Q to change
V and
f at the PCC. So, the proposed AVI should compensate for power changes at the PCC when the load changes. Therefore, the reference voltage in the
dq-reference frame is modified as follows:
In Equation (13),
and
are PI controller gains and
is the reference voltage for the
dq-reference frame obtained from the conventional droop control for controlling
P and
Q based on the change in
V and
F. For the SVI-based control, the modified reference voltage should be combined with the SVI, given as follows:
In the case of mismatched feeder impedances, the SVI-based control is not sufficient. Therefore, a droop-based AVI control was implemented to give more robustness to the DGs during mismatched line impedances. Equation (14) can be modified and expressed with virtual impedance as follows:
The output of the AVI will generate a new reference voltage for the cost function input for the MPC, which will be explained in
Section 4. This reference voltage can be further modified with the droop reference voltage and virtual impedance, and the new equation is expressed as follows:
Therefore, AVI inputs are still used in the droop equation, where power can be shared between parallel-connected DGs based on
P and
Q at the PCC. The simplified reference voltage in the
dq-reference frame from the AVI output is given in Equation (17):
where
are PI controller gains for the AVI, which are used for equal power sharing. As given in Equation (13), the modified reference voltage
is obtained through the AVI control mechanism’s output with the integration of virtual line impedance and droop control in the mathematical control model. Parameter
is the measured reactive power connected in parallel at the PCC. Equation (17) is the generated reference voltage for the next FSC-MPC process, which will be discussed in the next section, for the cost function’s error quantification.
Figure 2 shows the block diagram of the control structure of the AVI-based control and SVI-based control via the virtual impedance strategy for the reference voltage input for the MPC, along with relevant equations used for the controller’s functions.
As a recap, in the SVI-based control technique, load power sharing as per the connected load is not accurate, and voltage deviations occur at the PCC in systems with mismatched line impedances. A fixed value of virtual impedance is needed to mitigate the line impedance mismatch and is applied to the predefined line impedance. The virtual impedance with a fixed value is added to a system with mismatched line impedances to balance the inequality. The integration of the AVI-based control with the predictive cost function as the MPC input is explained in
Section 4.
Table 2 shows the difference between the proposed AVI-based and existing SVI-based control techniques. As concluded from the table, in the SVI-based control, the shared power by each DG inverter is not accurate as per the connected load, because the static virtual impedance does not adjust itself to the change in the line impedance value. Moreover, there are voltage deviations due to the addition of static virtual impedance, where the voltage keeps on deviating with additional loads in a system with mismatched feeder impedances.
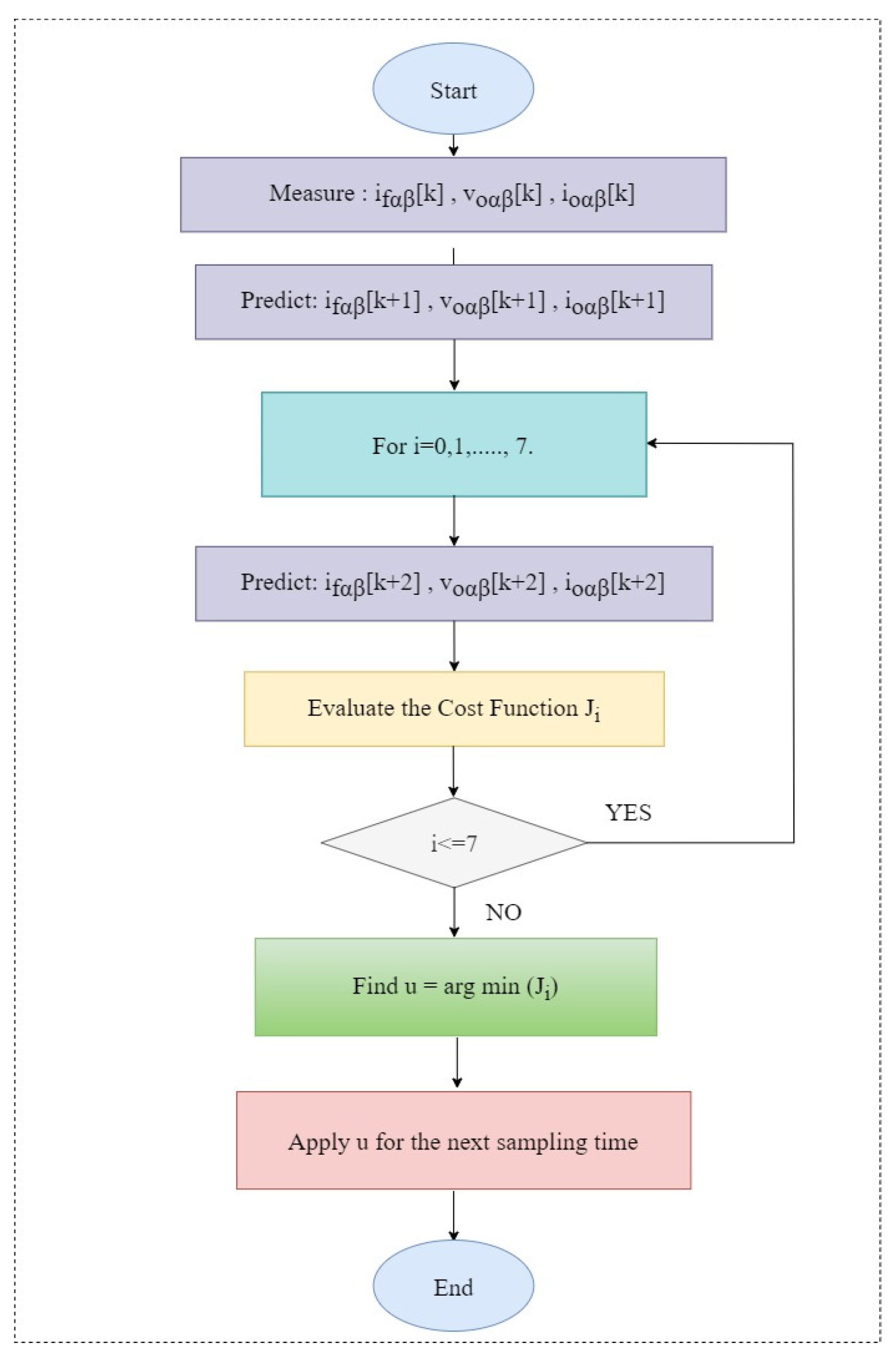
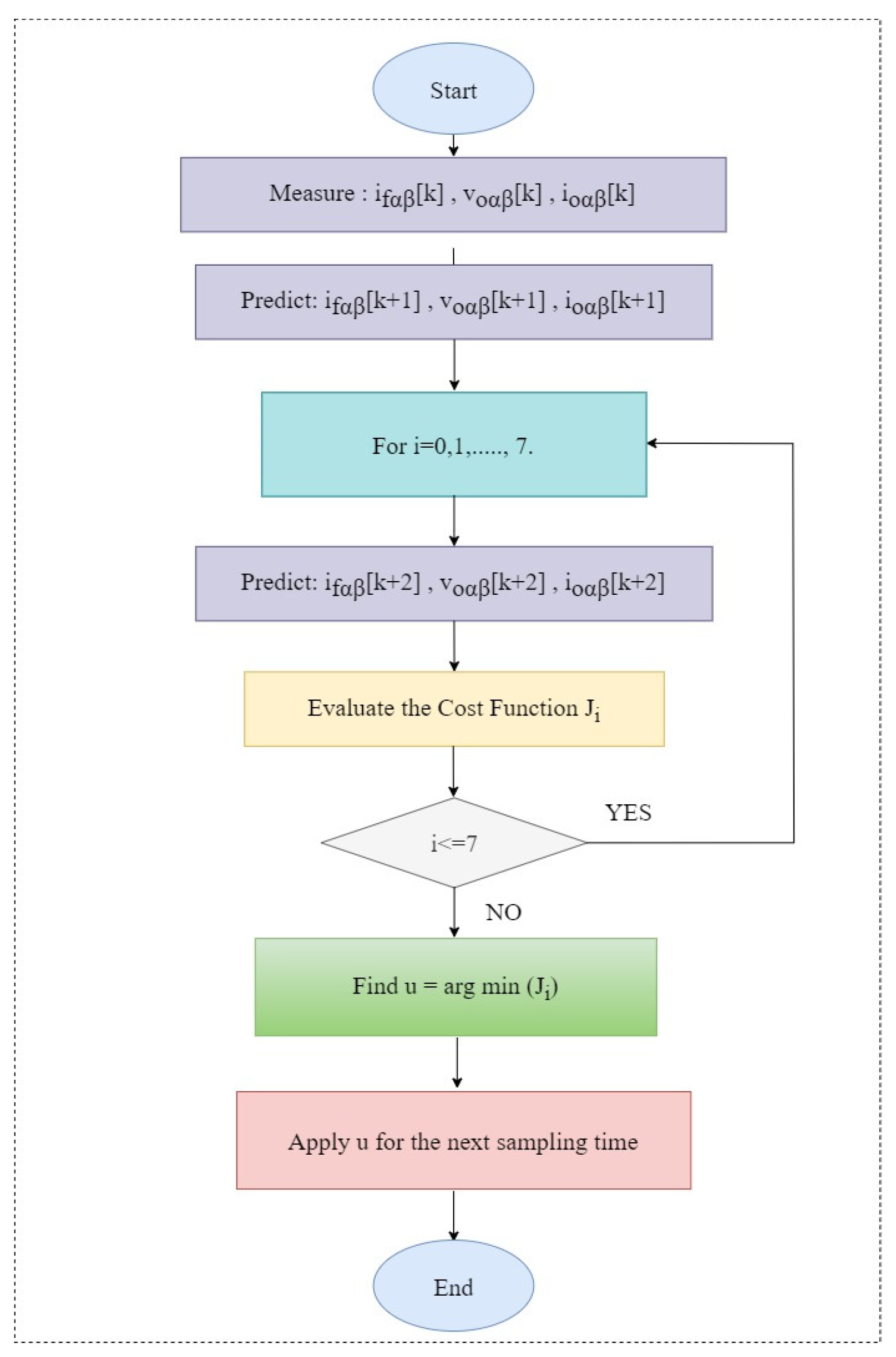
4. Modeling Predictive Cost Function for FCS-MPC’s Vector Control
The cost function is the most essential parameter for the MPC-based control technique, as it generates the vector control for the inverter’s switching pattern. Predictions are made on the receding horizon pattern at k + 2 steps [
27] in the
reference frame, formulated as follows:
where
are the reference voltage and output voltage to the inverter, respectively. Parameter
is tracked by
at two steps ahead (k + 2) at a sampling time (
Ts) of 12 × 10
−6 in the finite control set (FCS).
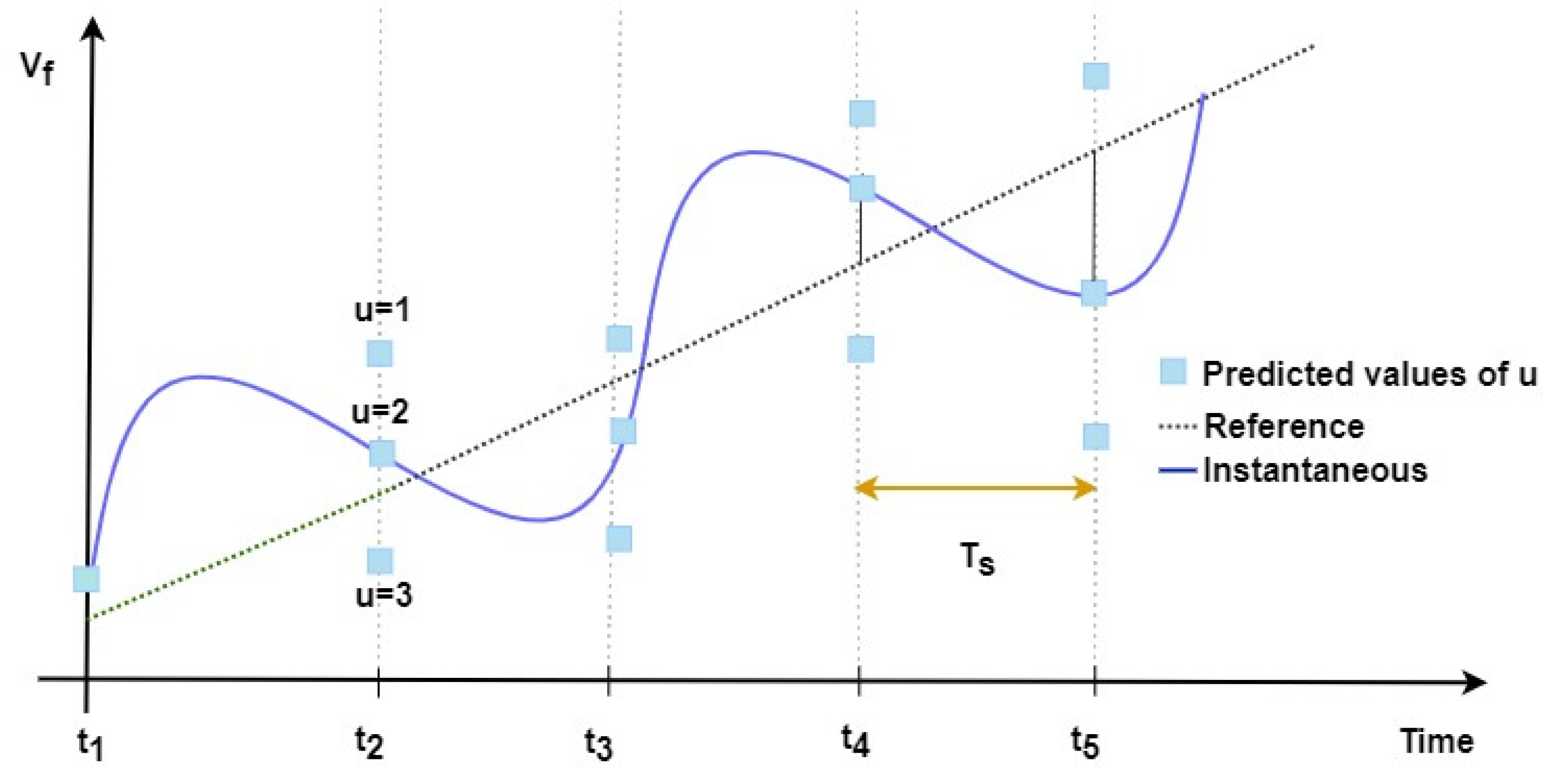
In the conventional FCS-MPC, the cost function (CF) is implemented in first-order systems, which is determined by the node circuit equation of the inverter, as second-order or higher-order systems with a CF show an unstable behavior. In first-order systems, there is no cross coupling between impedances, while in higher-order systems, there is a cross-coupling equation among the state variables. Also, in first-order systems, the capacitor’s voltage is directly regulated by the filter’s current. However, in second- or higher-order systems, the capacitor’s voltage is indirectly regulated by the current of the inductor in the inverter. Therefore, the voltage tracking error continuously increases, as shown in
Figure 3, where the predicted trajectory is heading away from the reference (dotted line) at any particular time interval. So, the CF in Equation (18) for the FCS is needed to track the reference voltage and to give small derivative terms simultaneously in order to minimize the tracking error effect between the reference and actual loop feedback.
Therefore, voltage derivative terms should be taken into account from the inductor’s current in order to regulate the capacitor’s voltage in the filter circuit. The reference voltage obtained from the AVI is the derivative function for the CF, expressed as follows:
where
and
. The capacitor’s voltage is represented by
. Next, by taking the derivatives of the reference voltage and output voltage of the AVI-based control with the step CF, the combination is formulated as follows:
Based on Equation (21), the reference voltage
is attained from the AVI output, as explained in
Section 3, and this
is proportional to the CF. Here,
is with a two-step-ahead prediction (
k + 2). Therefore, the CF formula in Equation (21) is combined with the AVI output’s reference voltage to generate the CF-minimized error, computed as follows:
where
are weighting factors to address the uncertainties in the system.
For the SVI-based control scheme, the cost function is calculated using the reference voltage given in Equation (14), whereas the updated reference voltage in Equation (22) is used for the cost function calculation for the proposed FCS-MPC scheme. The flow chart of the control algorithms of the cost function for the proposed FCS-MPC controller is shown in
Figure 4.
Figure 5 shows the block diagram of AVI-FCS-MPC and SVI-FCS-MPC with the addition of Equation (22) for the AVI-based control and Equation (14) for the SVI-based control for the minimization of the CF for the transient response of the VSC control in the inverter with the reference voltage
. The weighting factor is obtained through the trial-and-error method from 0 to 0.1 while tuning the controller. Hence,
when
, and
when
,
.
6. Results and Discussion
In this section, the results for the AVI-MPC and SVI-based control are shown and discussed. The real and reactive power sharing, the voltage at the PCC, the current to the load and the frequency deviation during load changes were measured for each DG inverter. As for the load, Load
1 was connected from 0 s to 1 s at 1.2 kW, Load
2 from 1 s to 2 s at 0.5 kW, Load
3 from 2 s to 3 s at 0.7 kW and, finally, Load
4 from 3 s to 4 s at 1 kW. The aim was to show the reliability of the suggested AVI-based controller, where equal power sharing between the DGs, as well as voltage stability could be achieved. The percentage error for the voltage and current is calculated as follows:
The percentage error for power sharing accuracy in the result section is calculated as follows:
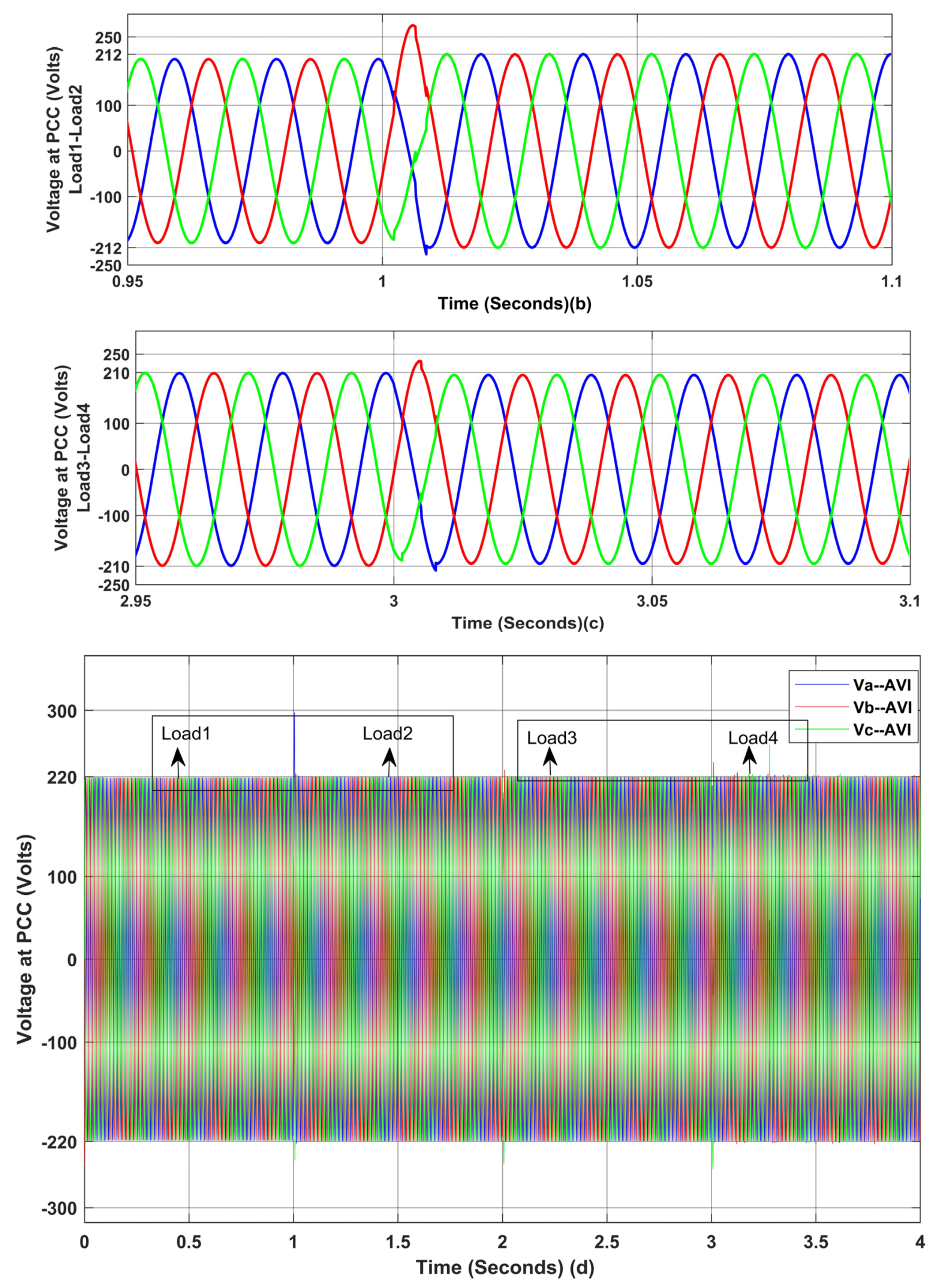
The voltage output at the PCC is shown and explained in this subsection. The performance of the suggested AVI-MPC was compared with that of the SVI-based control.
Figure 7a shows the voltage profile at the PCC when load transitions were applied for the SVI-based controller. As shown in the zoomed-in images in
Figure 7b,c, the voltages at the PCC when Load
1, Load
2, Load
3 and Load
4 were connected were 206 V, 212 V, 210 V and 205.5 V, respectively, which were not at the rated PCC voltages.
Figure 7d shows the voltage magnitudes at the PCC for the proposed AVI-MPC, where the PCC voltage was near the rated values stated in
Table 4. The zoomed-in image in
Figure 7e shows that the voltage at the PCC was 218 V when Load
1 was connected, and it was still maintained at 219.5 V when Load
2 was connected.
Figure 7f shows the zoomed-in image of the voltage profile when Load
3 and Load
4 were connected, where the voltage at the PCC still remained at 220 V.
Table 4 shows the comparison of the percentage errors of the voltages at the PCC for the controllers. It is clear from this result that the proposed AVI-based predictive control scheme successfully maintained the voltage magnitude at the PCC at 220 V with minimum errors.
- B.
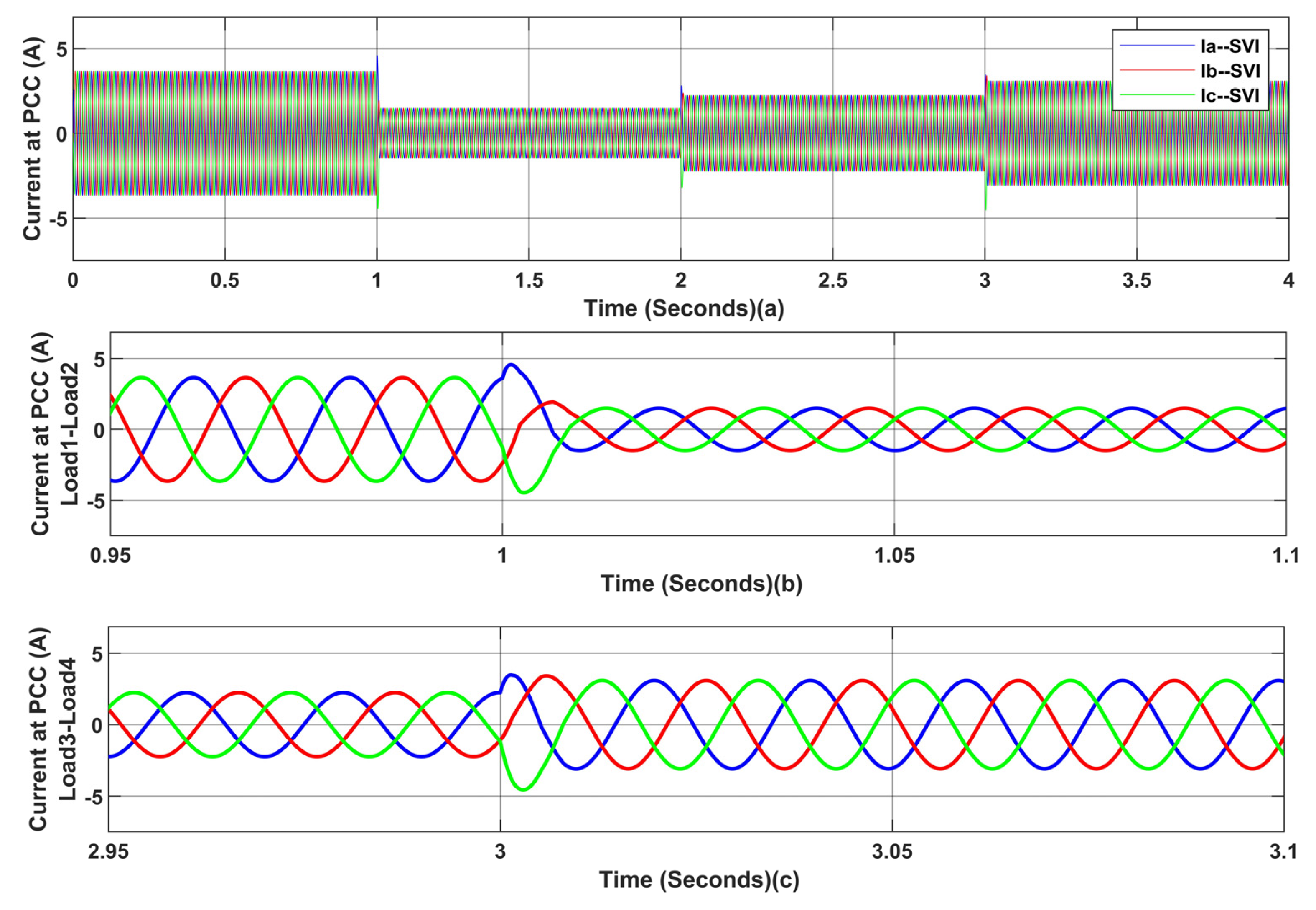
Current Output During Load Changes (Low to High and Vice Versa)
The current outputs at the PCC during load transience from high to low loads and vice versa were also compared and analyzed.
Figure 8a–c show the output current result at the PCC when the DGs were operated using the SVI-based controller. The zoomed-in images in
Figure 8b,c show increased transient responses when the rated load value changed from high to low and from low to high, where current outputs were measured at 3.94 A, 1.54 A, 2.61 A and 3.4 A when Load
1, Load
2, Load
3 and Load
4 were connected, respectively.
Figure 8d–f show the output current when the proposed AVI-based predictive controller was used. The zoomed-in images in
Figure 8e,f show that there was no transient effect on the current when the load changed, as based on the time stated in
Table 3. In general, if the transient current is more than the rated current, the circuit breaker will be activated, and it will cause DGs to disconnect from the PCC. Moreover, the output currents, which were measured at 3.97 A, 1.54 A, 2.36 A and 3.3 A when Load
1, Load
2, Load
3 and Load
4 were connected, respectively, were at the allowable rated value, and, hence, minimum transience was obtained using the AVI-based controller.
- C.
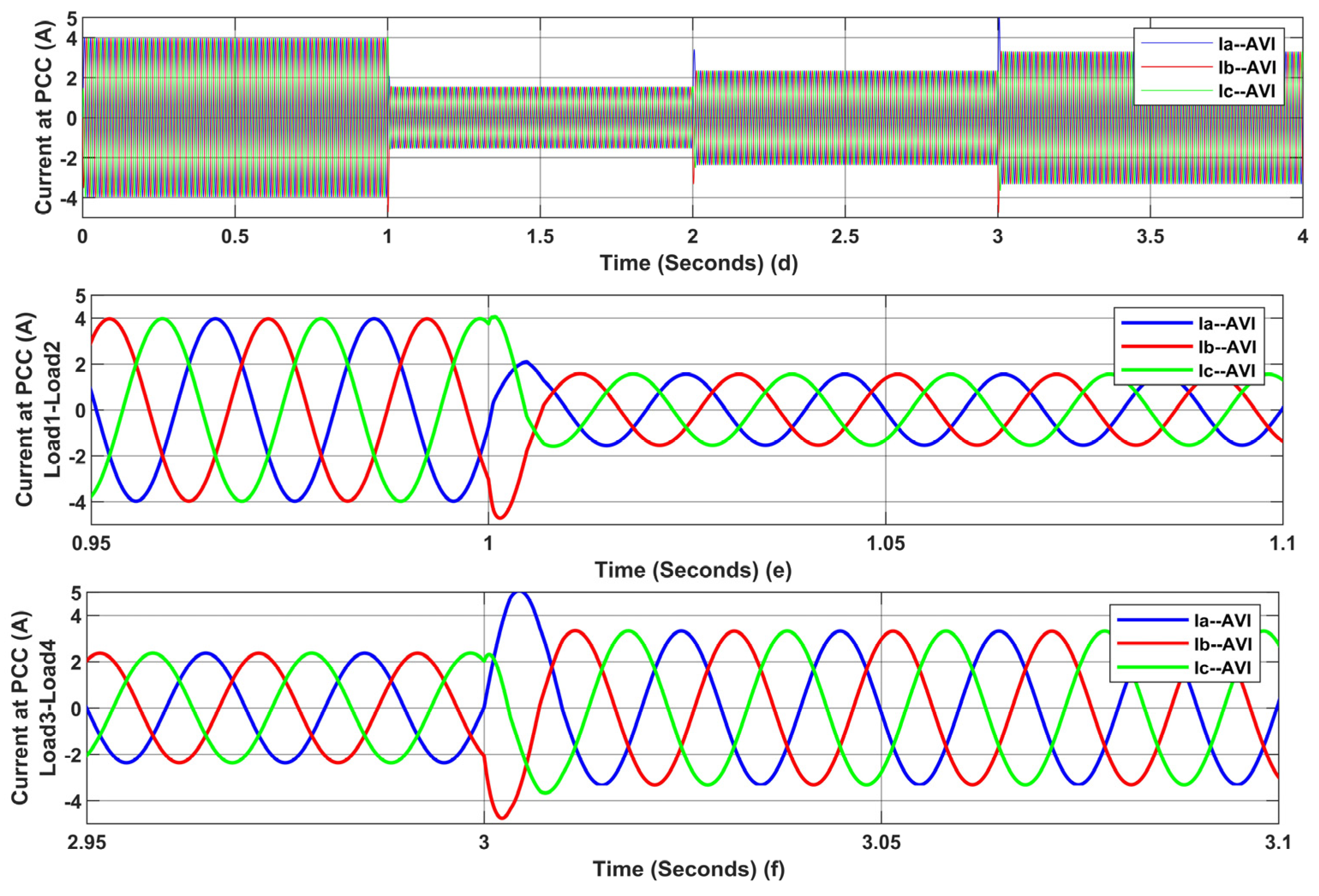
Active and Reactive Power Sharing Between DGs During Load Transitions
The active power sharing between DG
1 and DG
2 for the SVI-based control scheme and the proposed AVI-MPC scheme is discussed in this subsection. The power sharing values between DG
1 and DG
2 for the controllers when Load
1, Load
2, Load
3 and Load
4 were connected at different time intervals are shown in
Figure 9a. For the SVI-based controller, DG
1 and DG
2 shared 500 W when Load
1 was connected at the PCC, 240 W when Load
2 was connected, 318 W when Load
3 was connected and 445 W when Load
4 was connected, but the DGs should generate about 1200 W, 500 W, 700 W and 1000 W, respectively, based on
Table 2. Although DG
1 and DG
2 shared equal power, this power sharing was not enough as needed by the load, which caused mismatched power generation by the DGs. For the AVI-based controller, the power shared between DG
1 and DG
2 when Load
1 was connected at the PCC was 597.5 W, which totaled to about 1.2 kW, nearly the same as that tabulated in
Table 2.
The power sharing between DG
1 and DG
2 for the SVI-based and AVI-based controllers when Load
1 was connected is shown in
Figure 9b, where the AVI-based controller was able to have equal power sharing at 600 W for each DG when Load
1 required 1.2 kW.
Figure 9c–e show similar results on the quality of active power sharing between the DGs for the AVI-based and SVI-based controllers. The AVI-based controller showed a more accurate sharing capability, where it can reach the rated value of Load
2. Therefore, the obtained results indicate that the proposed controller was more capable of sharing equal and accurate active power than the AVI-based controller. This is because the reference input to the AVI started with the calculations of
P and
Q needed by the load.
Figure 10 shows the comparison of the total load active power received at the PCC for the SVI-based controller and the proposed AVI-based controller in order for the controllers to supply the rated load power when a load was connected at the PCC. The load transitions are shown in
Figure 10a for Load
1, Load
2, Load
3 and Load
4. For the SVI-based controller, the values of the total active power were 1000 W, 480 W, 636 W and 890 W when Load
1, Load
2, Load
3 and Load
4 were connected, respectively, which did not achieve the rated load values stated in
Table 2. However, for the AVI-based controller, all the required load values were achieved when Load
1, Load
2, Load
3 and Load
4 were connected, which were 1195 W, 499.5 W, 698 W and 996.5 W, as shown in
Figure 10b–e, respectively. Therefore, the results show that the AVI-based predictive controller was capable of supplying the rated power needed by the load from the DGs in order to avoid excessive power-loss dissipation at the PCC.
Table 5 shows the comparison of the active power sharing between the DGs and the load active power at the PCC for the SVI-based and AVI-based control schemes, along with power error percentages.
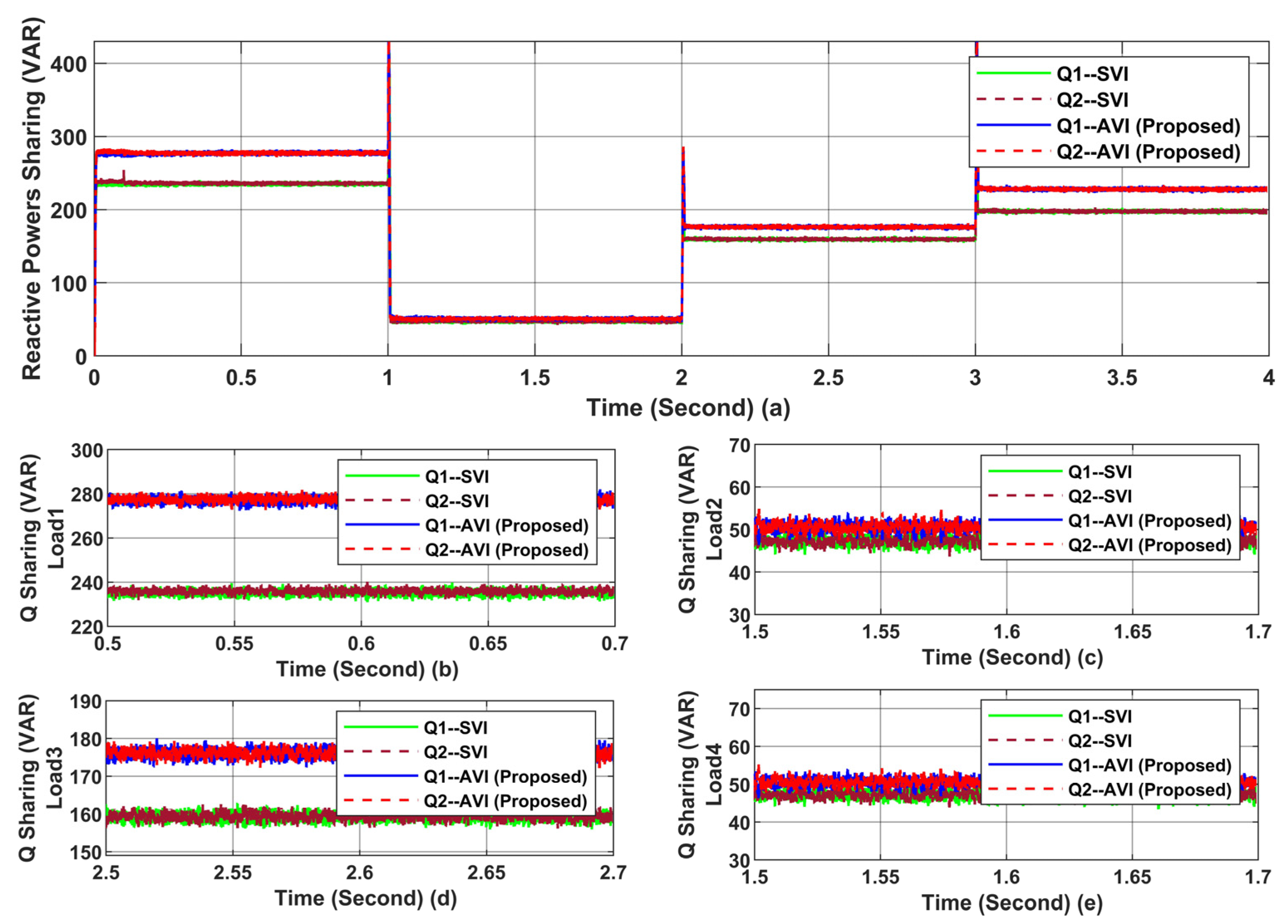
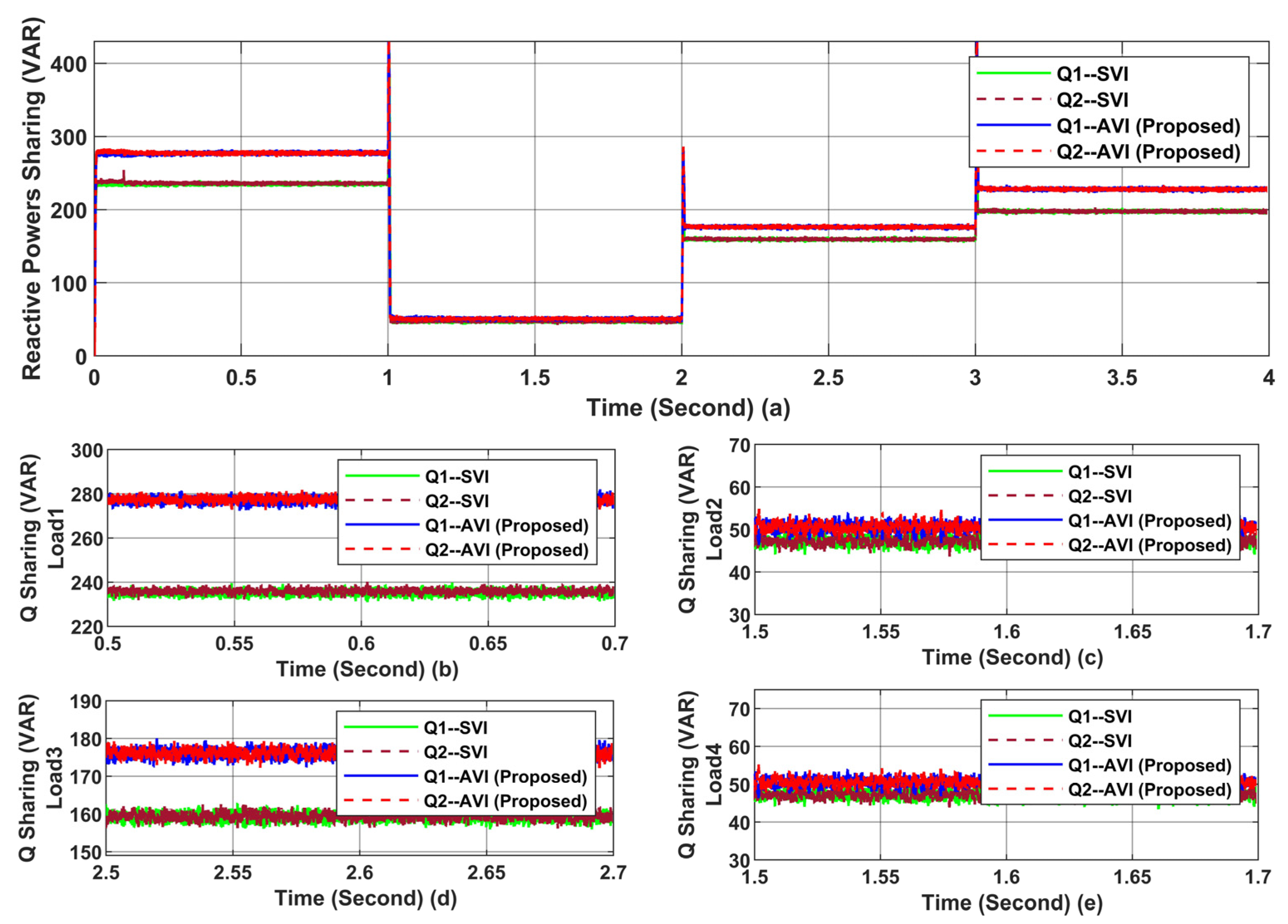
The results of the reactive power sharing for the SVI-based controller and AVI-based controller are shown in
Figure 11a. The results show that the shared power, when using the AVI-based controller, was close to the rated
Q needed by the load during load changes. The zoomed-in images in
Figure 11b–e give a clear visualization of when the SVI-based and AVI-based controllers were used. When Load
1 was connected, as shown in
Figure 11b, the reactive power shared by each DG inverter was 273.5 Var for the AVI-based controller, which was higher than the reactive power shared at 248 Var for the SVI-based controller. However, when the low-rated loads of Load
2 and Load
3 were connected, the reactive power sharing values between the DGs for both controllers were almost the same, as shown in
Figure 11c–e. This shows that if the Var required by the load was low, the DGs in both controllers can share the
Q evenly but not when a high Q value was needed by the load for the SVI-based controller.
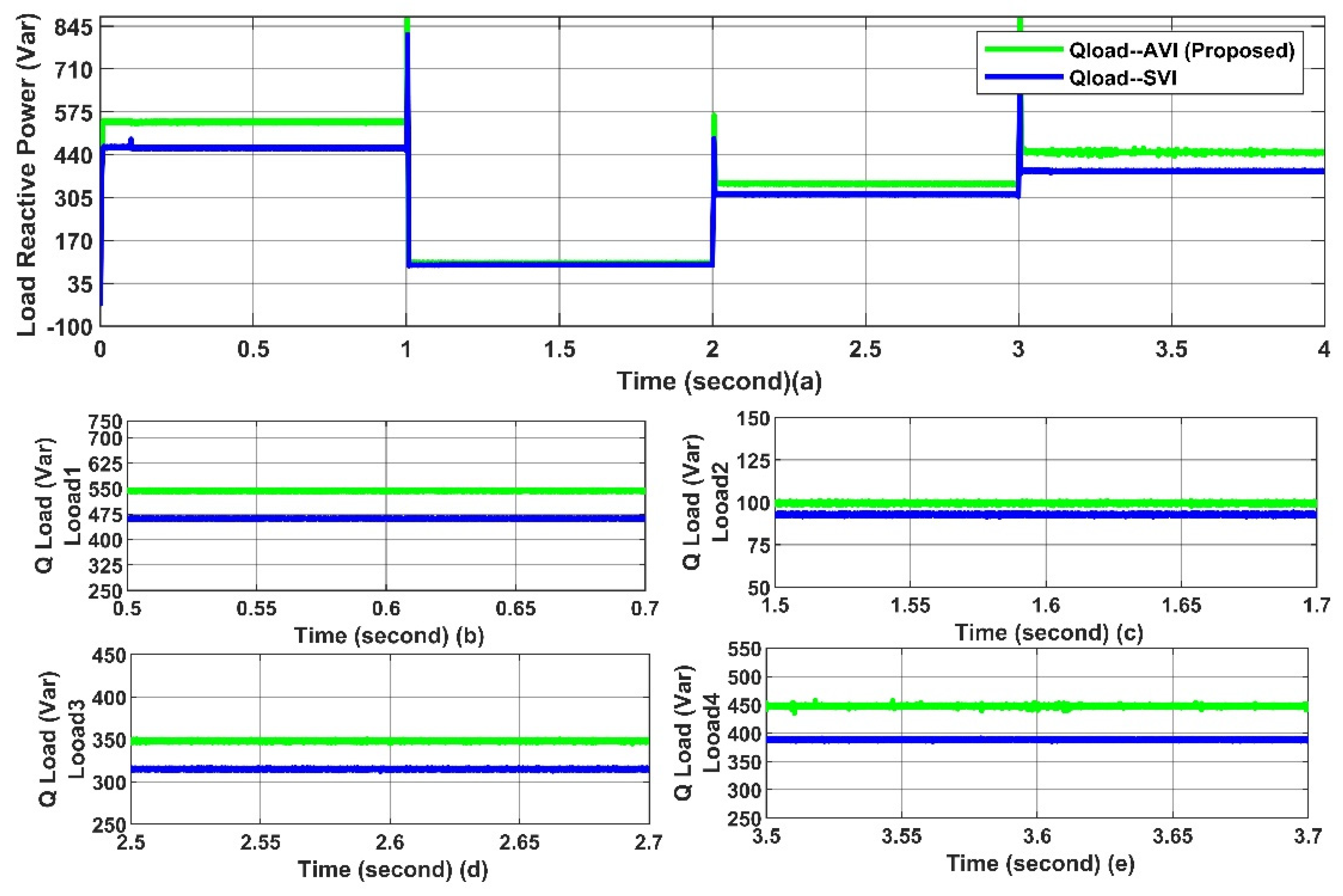
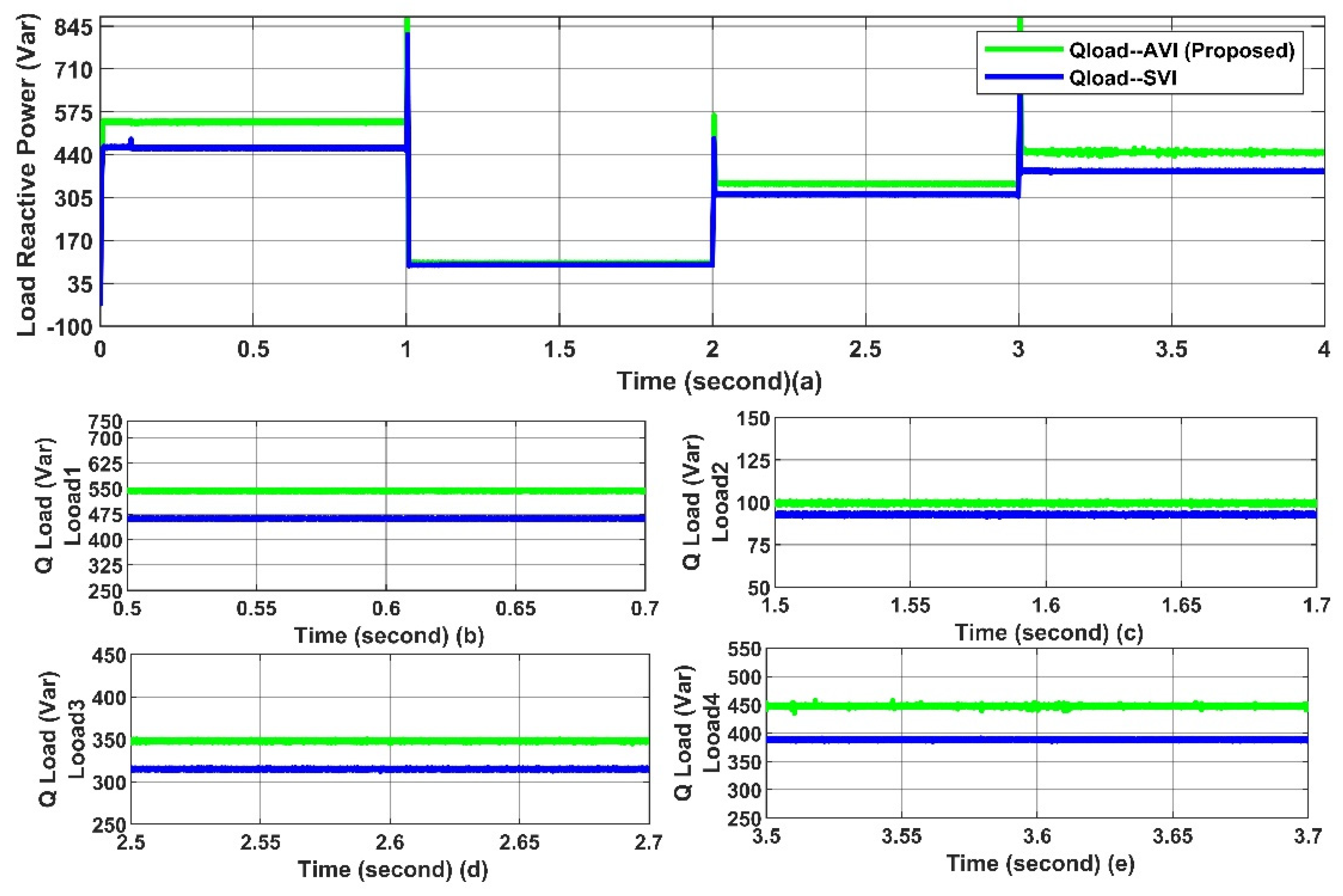
The results of the load reactive power at the PCC for the SVI-based and AVI-based controllers are shown in
Figure 12a, and the zoomed-in images of the load reactive power during each load transition are shown in
Figure 12b–e. In the case of the SVI-based controller, the reactive powers supplied by each DG to Load
1, Load
2, Load
3 and Load
4 were 480 Var, 90 Var, 320 Var and 394 Var, respectively. However, for the AVI-based controller, the total reactive powers when Load
1, Load
2, Load
3 and Load
4 were connected were 547 Var, 100 Var, 350 Var and 450 Var, respectively, which were similar to the values specified in
Table 2 for the loads. A comparison provided in
Table 6 shows the difference between the performances of the two controllers in terms of real and active power sharing, which highlights the contribution of the AVI and its accuracy based on percentage errors.
- D.
Frequency Response During Load Changes (Low to High and Vice Versa)
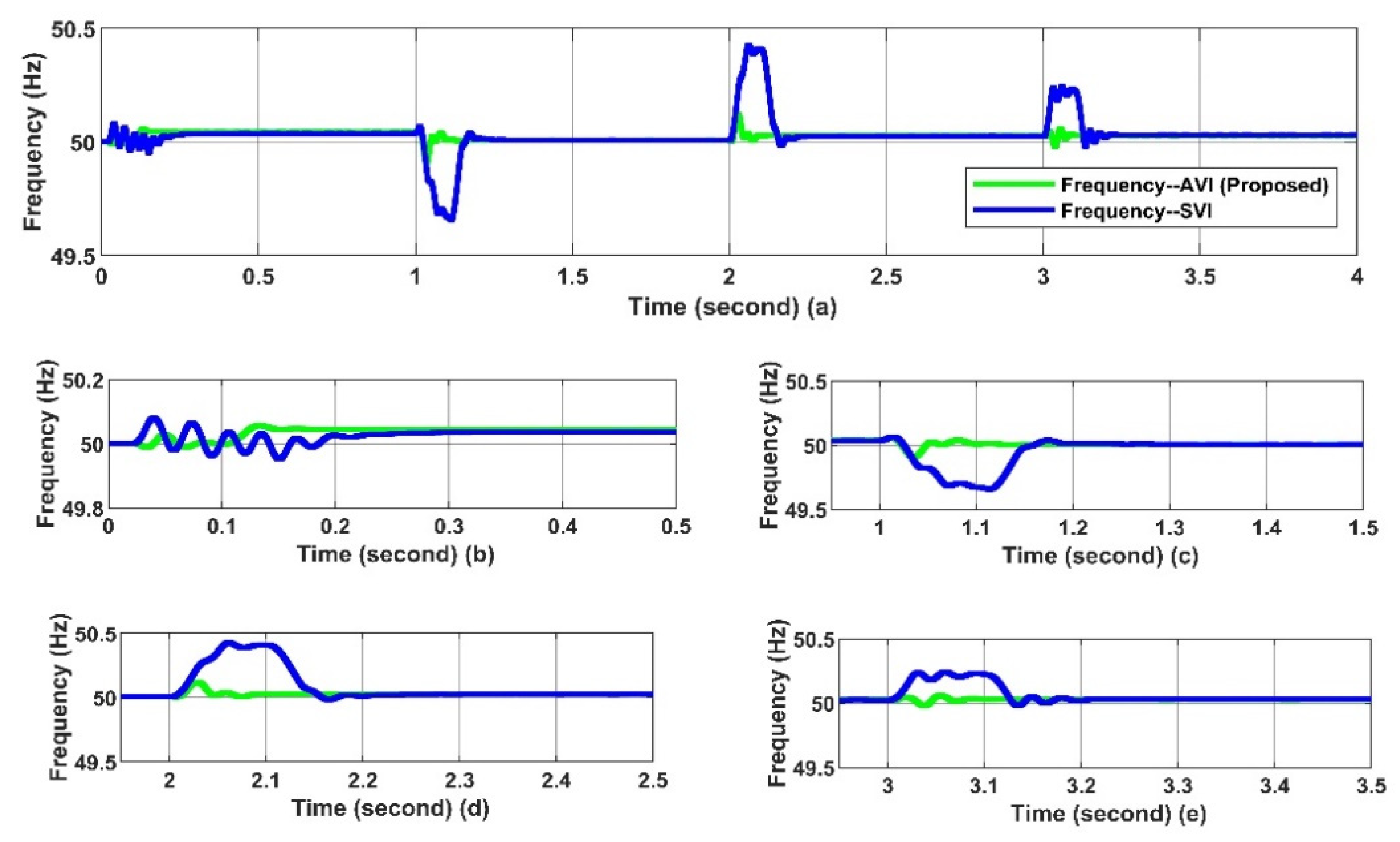
The PCC frequency response was also a very important parameter to be checked in order to avoid frequency deviation during the synchronization of DG inverters with the load. The frequency deviation was caused by the load changes, and this deviation should range between 49 Hz to 51 Hz to avoid a frequency swing in the microgrid. A minimized deviation would indicate that the controller was working efficiently in terms of its response at the transient time. The frequency response comparison is shown in
Figure 13a–e for the SVI-based and AVI-MPC control schemes. When the SVI-based controller was applied to the DG inverters, the frequency responses at the PCC were approximately 50.4 Hz, 50.01 Hz, 50.02 Hz and 50.035 Hz when Load
1, Load
2, Load
3 and Load
4 were connected, respectively, as shown in
Figure 13a–e. However, with the proposed AVI-based control, the frequency responses when Load
1, Load
2, Load
3 and Load
4 were connected were approximately 50.038 Hz, 50 Hz, 50.1 Hz and 50.03 Hz, respectively, which shows a more stable result. Moreover, both the SVI-based and AVI-based controllers were able to limit the deviations to within the allowable limit, which proved that the proposed controllers were able to regulate the frequency response, as shown in
Figure 13a–e.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}