
Analysis of Influencing Factors of Level 3 Automated Vehicle Takeover: A Literature Review


Abstract
1. Introduction
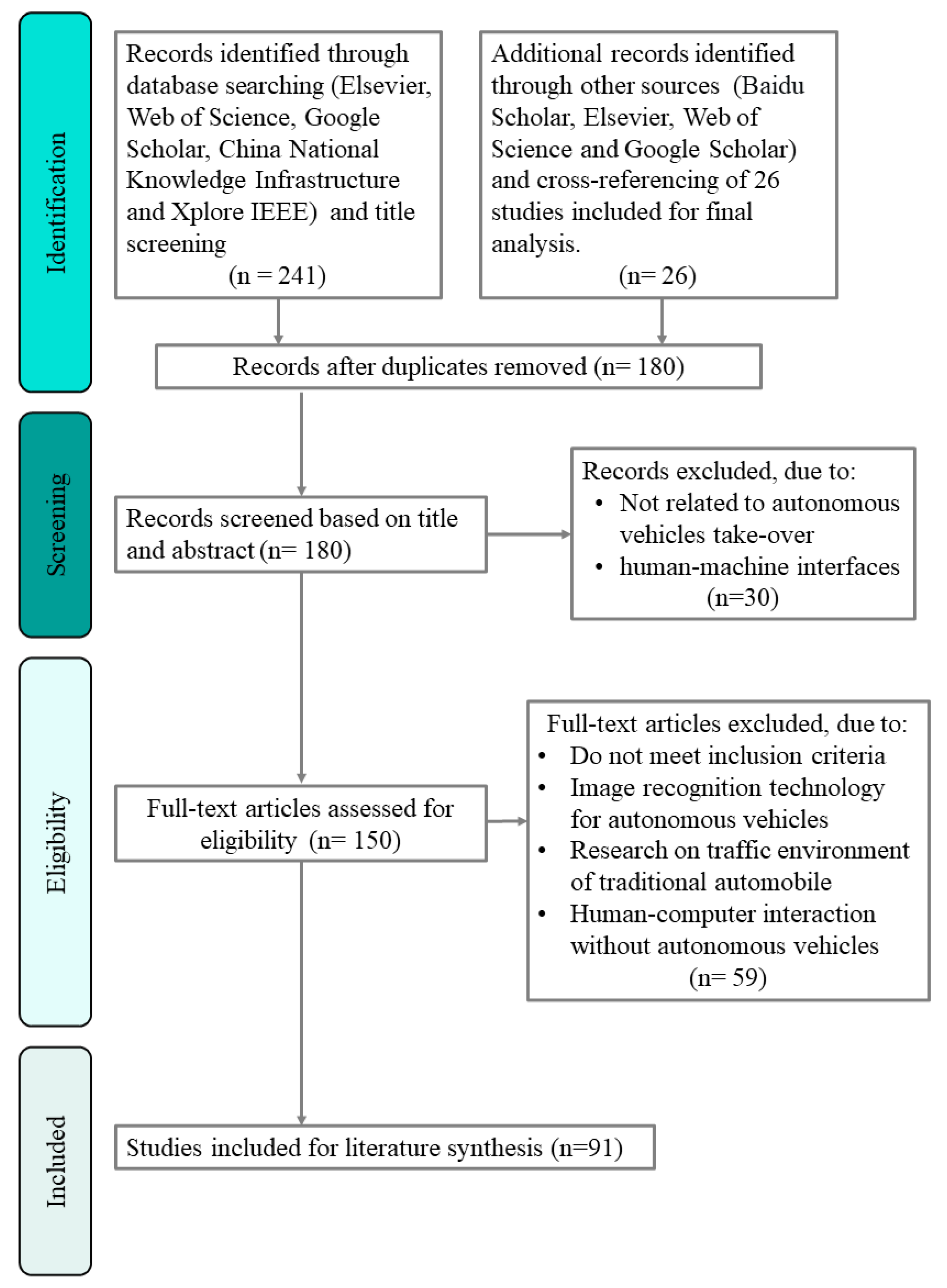
2. Research Methodology
2.1. Research Subjects
2.2. Research Methods and Inclusion Criteria
- Articles must involve self-driving takeover;
- The article should focus on the impact of the driver as the agent, the traffic environment, and the autonomous driving system on the takeover;
- Articles must be from peer-reviewed journals.
- Technical reports or official government documents are not included;
- Papers that focus solely on human-driven vehicles are excluded.
3. Human Factor
3.1. Non-Driving-Related Task
3.2. Non-Driving Postures
3.3. Individual Characteristics
3.3.1. Age
3.3.2. Fatigue
3.3.3. Alcohol
3.4. Trust
3.4.1. Establishment of Trust
3.4.2. Impact of Trust
4. Traffic Environment
4.1. Traffic Density
4.2. Route Shape and Weather Conditions
5. Automated Driving System
5.1. Human–Computer Interaction
5.1.1. Visual Interaction
5.1.2. Auditory Interaction
5.1.3. Tactile Interaction
5.1.4. Olfactory Interaction
5.1.5. Multimodal Interaction Modes
5.2. Control Transfer Mode
6. Discussion
6.1. Human Factors
6.2. Traffic Environment
6.3. Automated Driving System
7. Conclusions
- Non-driving posture not only directly affects takeover performance but also indirectly improves takeover performance by improving comfort and reducing fatigue;
- Drivers’ physiological factors affect takeover behavior, which can be reduced by participating in NDRT;
- Unreasonable trust in ADS can increase takeover time and increase accident risk;
- In the road environment, factors that affect the safety of an automated takeover include traffic density, geometric alignment of the road, and extreme weather;
- In ADS, multi-mode interaction design can effectively improve takeover performance, but unreasonable interaction design will hinder drivers from taking over.
- As the influence of human factors on takeover performance is controversial, the criteria for driver participation in NDRT can be refined in the future, effective driver fatigue measurement standards can be developed, and the complex relationship between NDRT, non-driving postures, and fatigue on takeover performance can be further discussed, which will help to fully understand the influence of human factors on takeover;
- As driver trust changes dynamically, continuous research can be carried out to analyze the dynamic process of trust level change over time through long-term tracking of the interaction between the driver and automatic driving system so as to reveal the long-term impact of the driver’s dependence on system and trust under different driving environments, and provide a reliable basis for ADS design;
- Due to current regulations and driver safety issues, most of the studies discussed in this study were conducted on driving simulators with different real feelings, and it is suggested that future studies collect experimental data on real platforms;
- Based on the limitations of the present study, takeover prediction models combining driver status and traffic environment conditions can be developed in the future. Such models can detect and analyze the driver’s physiological state (such as heart rate, eye movement, fatigue, etc.) as well as traffic and weather conditions in real time to more accurately predict takeover behavior, thereby improving the takeover performance and safety of ADS in different driving scenarios.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- SAE J 3016; Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems. SAE Internatinoal: Warrendale, PA, USA, 2014.
- SAE J 3016; Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE Internatinoal: Warrendale, PA, USA, 2021.
- Zhang, B.; de Winter, J.; Varotto, S.; Happee, R.; Martens, M. Determinants of take-over time from automated driving: A meta-analysis of 129 studies. Transp. Res. Part F Traffic Psychol. Behav. 2019, 64, 285–307. [Google Scholar] [CrossRef]
- Merat, N.; Jamson, A.H.; Lai, F.C.H.; Carsten, O. Highly Automated Driving, Secondary Task Performance, and Driver State. Hum. Factors 2012, 54, 762–771. [Google Scholar] [CrossRef] [PubMed]
- Guo, H.; Zhang, Y.; Cai, S.; Chen, X.; Galante, F. Effects of Level 3 Automated Vehicle Drivers’ Fatigue on Their Take-Over Behaviour: A Literature Review. J. Adv. Transp. 2021, 2021, 8632685. [Google Scholar] [CrossRef]
- Wu, Y.; Kihara, K.; Hasegawa, K.; Takeda, Y.; Sato, T.; Akamatsu, M.; Kitazaki, S. Age-related differences in effects of non-driving related tasks on takeover performance in automated driving. J. Saf. Res. 2020, 72, 231–238. [Google Scholar] [CrossRef] [PubMed]
- Depner, N.; Bavendiek, J.; Kn, S.; Uhlig, M. HMI Concept for Safe Driving Mode Transitions. ATZ Worldw. 2020, 122, 26–31. [Google Scholar] [CrossRef]
- Du, N.; Yang, X.J.; Zhou, F. Psychophysiological responses to takeover requests in conditionally automated driving. Accid Anal. Prev. 2020, 148, 105804. [Google Scholar] [CrossRef]
- Lu, Z.; Coster, X.; de Winter, J. How much time do drivers need to obtain situation awareness? A laboratory-based study of automated driving. Appl. Erg. 2017, 60, 293–304. [Google Scholar] [CrossRef]
- Körber, M.; Gold, C.; Lechner, D.; Bengler, K. The influence of age on the take-over of vehicle control in highly automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2016, 39, 19–32. [Google Scholar] [CrossRef]
- Yoon, S.H.; Ji, Y.G. Non-driving-related tasks, workload, and takeover performance in highly automated driving contexts. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 620–631. [Google Scholar] [CrossRef]
- Wohlin, C. Guidelines for snowballing in systematic literature studies and a replication in software engineering. In Proceedings of the 18th International Conference on Evaluation and Assessment in Software Engineering, London, UK, 13–14 May 2014. [Google Scholar] [CrossRef]
- Zeng, L.; Li, H.; Lin, L.; Hu, D.J.J.; Liu, H. ESG Standards in China: Bibliometric Analysis, Development Status Research, and Future Research Directions. Sustainability 2024, 16, 7134. [Google Scholar] [CrossRef]
- Warm, J.S.; Parasuraman, R.; Matthews, G. Vigilance requires hard mental work and is stressful. Hum. Factors 2008, 50, 433–441. [Google Scholar] [CrossRef] [PubMed]
- Jin, M.; Lu, G.; Chen, F.; Shi, X.; Tan, H.; Zhai, J. Modeling takeover behavior in level 3 automated driving via a structural equation model: Considering the mediating role of trust. Accid. Anal. Prev. 2021, 157, 106156. [Google Scholar] [CrossRef] [PubMed]
- Zeeb, K.; Buchner, A.; Schrauf, M. Is take-over time all that matters? The impact of visual-cognitive load on driver take-over quality after conditionally automated driving. Accid. Anal. Prev. 2016, 92, 230–239. [Google Scholar] [CrossRef] [PubMed]
- Weaver, B.W.; DeLucia, P.R. A Systematic Review and Meta-Analysis of Takeover Performance During Conditionally Automated Driving. Hum. Factors 2022, 64, 1227–1260. [Google Scholar] [CrossRef]
- Wang, W.; Li, Q.; Zeng, C.; Li, G.; Zhang, J.; Li, S.; Chen, B. Review of Take-over Performance of Automated Driving: Influencing Factors, Models, and Evaluation Methods. China J. Highw. Transp. 2023, 36, 202–224. [Google Scholar] [CrossRef]
- Juan, Y. Effects of Non-Driving Related Task Participation Mode on Takeover Performance of Young Drivers in Prolonged Automated Driving. Master’s Thesis, Chang’an University, Xi’an, China, 2021. Available online: https://link.cnki.net/doi/10.26976/d.cnki.gchau.2021.000487 (accessed on 3 January 2024).
- Naujoks, F.; Höfling, S.; Purucker, C.; Zeeb, K. From partial and high automation to manual driving: Relationship between non-driving related tasks, drowsiness and take-over performance. Accid. Anal. Prev. 2018, 121, 28–42. [Google Scholar] [CrossRef]
- Miller, D.; Sun, A.; Johns, M.; Ive, H.; Sirkin, D.; Aich, S.; Ju, W. Distraction Becomes Engagement in Automated Driving. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2015, 59, 1676–1680. [Google Scholar] [CrossRef]
- Schömig, N.; Hargutt, V.; Neukum, A.; Petermann-Stock, I.; Othersen, I. The Interaction Between Highly Automated Driving and the Development of Drowsiness. Procedia Manuf. 2015, 3, 6652–6659. [Google Scholar] [CrossRef]
- Biondi, F.N.; Lohani, M.; Hopman, R.; Mills, S.; Cooper, J.M.; Strayer, D.L. 80 MPH and out-of-the-loop: Effects of real-world semi-automated driving on driver workload and arousal. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2018, 62, 1878–1882. [Google Scholar] [CrossRef]
- Lie, G.; Linlin, X.; Zengke, Q.; Xu, W. Analysis and Overview of Influencing Factors on Autonomous Driving Takeover. Transp. Syst. Eng. Inf. 2022, 22, 72–90. [Google Scholar] [CrossRef]
- Liang, N.; Lim, C.; Yu, D.; Prakah-Asante, K.O.; Pitts, B.J. Predicting Automated Vehicle Takeover Decision During the Nighttime. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2023, 67, 914–919. [Google Scholar] [CrossRef]
- Lee, S.C.; Yoon, S.H.; Ji, Y.G. Effects of Non-Driving-Related Task Attributes on Takeover Quality in Automated Vehicles. Int. J. Hum.–Comput. Interact. 2021, 37, 211–219. [Google Scholar] [CrossRef]
- Müller, A.L.; Fernandes-Estrela, N.; Hetfleisch, R.; Zecha, L.; Abendroth, B. Effects of non-driving related tasks on mental workload and take-over times during conditional automated driving. Eur. Transp. Res. Rev. 2021, 13, 15. [Google Scholar] [CrossRef]
- Yang, Y.; Klinkner, J.N.; Bengler, K. How Will the Driver Sit in an Automated Vehicle?—The Qualitative and Quantitative Descriptions of Non-Driving Postures (NDPs) When Non-Driving-Related-Tasks (NDRTs) Are Conducted. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018); Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 409–420. [Google Scholar]
- Bohrmann, D.; Bengler, K. Reclined Posture for Enabling Autonomous Driving. In Human Systems Engineering and Design II; Ahram, T., Karwowski, W., Pickl, S., Taiar, R., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 169–175. [Google Scholar]
- Qingyang, H.; Xiaoping, J.; Yikang, Z. Analysis of Drivers’ Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement. Automot. Eng. 2023, 45, 382–392. [Google Scholar] [CrossRef]
- Cao, S.; Tang, P.Y.; Sun, X. Driver Take-Over Reaction in Autonomous Vehicles with Rotatable Seats. Safety 2020, 6, 12. [Google Scholar] [CrossRef]
- Yang, Y.; Gerlicher, M.; Bengler, K. How does relaxing posture influence take-over performance in an automated vehicle? Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2018, 62, 696–700. [Google Scholar] [CrossRef]
- Dissanaike, S.; Kaufman, R.; Mack, C.D.; Mock, C.; Bulger, E. The effect of reclined seats on mortality in motor vehicle collisions. J. Trauma-Inj. Infect. Crit. Care 2008, 64, 614–619. [Google Scholar] [CrossRef]
- Salthouse, T.A. When does age-related cognitive decline begin? Neurobiol. Aging 2009, 30, 507–514. [Google Scholar] [CrossRef] [PubMed]
- Radlmayr, J.; Gold, C.; Lorenz, L.; Farid, M.; Bengler, K. How Traffic Situations and Non-Driving Related Tasks Affect the Take-Over Quality in Highly Automated Driving. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2014, 58, 2063–2067. [Google Scholar] [CrossRef]
- Peng, Q.; Wu, Y.; Qie, N.; Iwaki, S. Age-related effects of executive function on takeover performance in automated driving. Sci. Rep. 2022, 12, 5410. [Google Scholar] [CrossRef]
- Gong, J.; Guo, X.; Pan, L.; Qi, C.; Wang, Y. Impact of Age on Takeover Behavior in Automated Driving in Complex Traffic Situations: A Case Study of Beijing, China. Sustainability 2022, 14, 483. [Google Scholar] [CrossRef]
- Clark, H.; Feng, J. Age differences in the takeover of vehicle control and engagement in non-driving-related activities in simulated driving with conditional automation. Accid Anal. Prev. 2017, 106, 468–479. [Google Scholar] [CrossRef]
- Hui, Z.; Ding, N.; Ke, Z.; Naikan, D.; Chaozhong, W. A review of driving fatigue research in human-machine co driving environments. Chin. J. Saf. Sci. 2023, 33, 204–211. [Google Scholar] [CrossRef]
- Lal, S.; Craig, A. A critical review of the psychophysiology of driver fatigue—ScienceDirect. Biol. Psychol. 2001, 55, 173–194. [Google Scholar] [CrossRef] [PubMed]
- Useche, S.A.; Ortiz, V.G.; Cendales, B.E. Stress-related psychosocial factors at work, fatigue, and risky driving behavior in bus rapid transport (BRT) drivers. Accid Anal. Prev. 2017, 104, 106–114. [Google Scholar] [CrossRef] [PubMed]
- Neubauer, C.; Matthews, G.; Langheim, L.; Saxby, D. Fatigue and voluntary utilization of automation in simulated driving. Hum. Factors 2012, 54, 734–746. [Google Scholar] [CrossRef] [PubMed]
- Gonçalves, J.; Happee, R.; Bengler, K. Drowsiness in Conditional Automation: Proneness, diagnosis and driving performance effects. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 873–878. [Google Scholar] [CrossRef]
- Jarosch, O.; Bellem, H.; Bengler, K. Effects of Task-Induced Fatigue in Prolonged Conditional Automated Driving. Hum. Factors 2019, 61, 1186–1199. [Google Scholar] [CrossRef]
- Vogelpohl, T.; Kühn, M.; Hummel, T.; Vollrath, M. Asleep at the automated wheel—Sleepiness and fatigue during highly automated driving. Accid. Anal. Prev. 2019, 126, 70–84. [Google Scholar] [CrossRef]
- Hirsch, M.; Diederichs, F.; Widlroither, H.; Graf, R.; Bischoff, S. Sleep and Take-Over in Automated Driving. Int. J. Transp. Sci. Technol. 2019, 9, 42–51. [Google Scholar] [CrossRef]
- Christophersen, A.S.; Mørland, J. Drugged driving, a review based on the experience in Norway. Drug Alcohol Depend. 1997, 47, 125–135. [Google Scholar] [CrossRef]
- Wiedemann, K.; Naujoks, F.; Worle, J.; Kenntner-Mabiala, R.; Kaussner, Y.; Neukum, A. Effect of different alcohol levels on take-over performance in conditionally automated driving. Accid. Anal. Prev. 2018, 115, 89–97. [Google Scholar] [CrossRef] [PubMed]
- Irwin, C.; Iudakhina, E.; Desbrow, B.; McCartney, D. Effects of acute alcohol consumption on measures of simulated driving: A systematic review and meta-analysis. Accid. Anal. Prev. 2017, 102, 248–266. [Google Scholar] [CrossRef]
- Veldstra, J.L.; Brookhuis, K.A.; de Waard, D.; Molmans, B.H.W.; Verstraete, A.G.; Skopp, G.; Jantos, R. Effects of alcohol (BAC 0.5 per thousand) and ecstasy (MDMA 100 mg) on simulated driving performance and traffic safety. Psychopharmacology 2012, 222, 377–390. [Google Scholar] [CrossRef]
- Lee, J.D.; See, K.A. Trust in automation: Designing for appropriate reliance. Hum. Factors 2004, 46, 50. [Google Scholar] [CrossRef]
- Kraus, J.; Scholz, D.; Stiegemeier, D.; Baumann, M. The More You Know: Trust Dynamics and Calibration in Highly Automated Driving and the Effects of Take-Overs, System Malfunction, and System Transparency. Hum. Factors 2020, 62, 718–736. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Chen, H.; Li, Z.; Li, H.; Gong, J.; Fu, Q. Influence Characteristics of Automated Driving Takeover Behavior in Different Scenarios. Chin. J. Highw. 2022, 35, 195–214. [Google Scholar] [CrossRef]
- Du, N.; Robert, L.; Yang, X.J. Cross-Cultural Investigation of the Effects of Explanations on Drivers’ Trust, Preference, and Anxiety in Highly Automated Vehicles. Transp. Res. Rec. 2023, 2677, 554–561. [Google Scholar] [CrossRef]
- Pflugfelder, E.H. Autonomous Vehicles and Gender: A Commentary. Transfers 2018, 8, 104–111. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z.G. Public Acceptance of Fully Automated Driving: Effects of Social Trust and Risk/Benefit Perceptions. Risk Anal. 2019, 39, 326–341. [Google Scholar] [CrossRef]
- Kraus, J.; Scholz, D.; Baumann, M. What’s Driving Me? Exploration and Validation of a Hierarchical Personality Model for Trust in Automated Driving. Hum. Factors 2021, 63, 1076–1105. [Google Scholar] [CrossRef]
- Charness, N.; Yoon, J.S.; Souders, D.; Stothart, C.; Yehnert, C. Predictors of Attitudes Toward Autonomous Vehicles: The Roles of Age, Gender, Prior Knowledge, and Personality. Front Psychol. 2018, 9, 2589. [Google Scholar] [CrossRef] [PubMed]
- Costa, P.T.; Mccrae, R.R.; Dye, D.A. Facet Scales for Agreeableness and Conscientiousness: A Revision of the NEO Personality Inventory. Personal. Individ. Differ. 1991, 12, 887–898. [Google Scholar] [CrossRef]
- Bailey, N.R.; Scerbo, M.W. Automation-induced complacency for monitoring highly reliable systems: The role of task complexity, system experience, and operator trust. Theor. Issues Ergon. Sci. 2007, 8, 321–348. [Google Scholar] [CrossRef]
- Mcguirl, J.M.; Sarter, N.B. Supporting Trust Calibration and the Effective Use of Decision Aids by Presenting Dynamic System Confidence Information. Hum. Factors 2006, 48, 656. [Google Scholar] [CrossRef]
- Beller, J.; Heesen, M.; Vollrath, M. Improving the driver-automation interaction: An approach using automation uncertainty. Hum Factors 2013, 55, 1130–1141. [Google Scholar] [CrossRef]
- Yijing, Z.; Ruosong, C.; Jinfei, M.; Guangbo, D. Construction of Driver Takeover Process and Psychological Model under L3 Level Autonomous Driving Conditions. Psychol. Sci. 2019, 42, 415–421. [Google Scholar] [CrossRef]
- Payre, W.; Cestac, J.; Delhomme, P. Fully Automated Driving: Impact of Trust and Practice on Manual Control Recovery. Hum. Factors 2016, 58, 229–241. [Google Scholar] [CrossRef] [PubMed]
- Korber, M.; Baseler, E.; Bengler, K. Introduction matters: Manipulating trust in automation and reliance in automated driving. Appl. Erg. 2018, 66, 18–31. [Google Scholar] [CrossRef]
- Yingfan, C. Research on the Effect of Driver Trust Matching on Driver Control Tak-Eover. Master’s Thesis, Beijing University of Civil Engineering and Architecture, Beijing, China, 2023. Available online: https://link.cnki.net/doi/10.26943/d.cnki.gbjzc.2023.000469 (accessed on 3 January 2024).
- Gawron, V.J. Human Performance, Workload, and Situational Awareness Measures Handbook, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Azevedo-Sa, H.; Jayaraman, S.K.; Esterwood, C.T.; Yang, X.J.; Robert, L.P.; Tilbury, D.M. Comparing the Effects of False Alarms and Misses on Humans’ Trust in (Semi)Autonomous Vehicles. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020. [Google Scholar] [CrossRef]
- Manchon, J.B.; Bueno, M.; Navarro, J. How the initial level of trust in automated driving impacts drivers’ behaviour and early trust construction. Transp. Res. Part F Traffic Psychol. Behav. 2022, 86, 281–295. [Google Scholar] [CrossRef]
- Gold, C.; Korber, M.; Lechner, D.; Bengler, K. Taking Over Control From Highly Automated Vehicles in Complex Traffic Situations: The Role of Traffic Density. Hum. Factors 2016, 58, 642–652. [Google Scholar] [CrossRef]
- Du, N.; Kim, J.; Zhou, F.; Pulver, E.; Tilbury, D.M.; Robert, L.P.; Pradhan, A.K.; Yang, X.J. Evaluating Effects of Cognitive Load, Takeover Request Lead Time, and Traffic Density on Drivers’ Takeover Performance in Conditionally Automated Driving. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual Event, 21–22 September 2020. [Google Scholar]
- Doubek, F.; Loosveld, E.; Happee, R.; de Winter, J. Takeover Quality: Assessing the Effects of Time Budget and Traffic Density with the Help of a Trajectory-Planning Method. J. Adv. Transp. 2020, 2020, 6173150. [Google Scholar] [CrossRef]
- Chen, F.; Lu, G.; Lin, Q.; Zhang, H.; Ma, S.; Liu, D.; Song, H. Review of drivers’ takeover behavior in conditional automated driving. J. Jilin Univ. (Eng. Ed.) 2024, 1–16. [Google Scholar] [CrossRef]
- Gold, C.; Happee, R.; Bengler, K. Modeling take-over performance in level 3 conditionally automated vehicles. Accid. Anal. Prev. 2018, 116, 3–13. [Google Scholar] [CrossRef] [PubMed]
- Borojeni, S.S.; Boll, S.C.J.; Heuten, W.; Bülthoff, H.H.; Chuang, L. Feel the Movement: Real Motion Influences Responses to Take-over Requests in Highly Automated Vehicles. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018. [Google Scholar]
- Martens, M.; Comte, S.; Kaptein, N. The Effects of Road Design on Speed Behaviour: A Literature Review. Inst. Road Saf. Res. 1997, 36, 1–27. [Google Scholar]
- Brandenburg, S.; Chuang, L. Take-over requests during highly automated driving: How should they be presented and under what conditions? Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 214–225. [Google Scholar] [CrossRef]
- Vlakveld, W.; van Nes, N.; de Bruin, J.; Vissers, L.; van der Kroft, M. Situation awareness increases when drivers have more time to take over the wheel in a Level 3 automated car: A simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 917–929. [Google Scholar] [CrossRef]
- Louw, T.; Merat, N. Are you in the loop? Using gaze dispersion to understand driver visual attention during vehicle automation. Transp. Res. Part C Emerg. Technol. 2017, 76, 35–50. [Google Scholar] [CrossRef]
- Yoon, S.H.; Kim, Y.W.; Ji, Y.G. The effects of takeover request modalities on highly automated car control transitions. Accid. Anal. Prev. 2019, 123, 150–158. [Google Scholar] [CrossRef]
- Naujoks, F.; Mai, C.; Neukum, A. The Effect of Urgency of Take-Over Requests During Highly Automated Driving Under Distraction Conditions. Int. Conf. Appl. Hum. Factors Ergon. Ahfe 2014, 7, 431. [Google Scholar]
- Baek, S.J.; Yun, H.; Yang, J.H. How do humans respond when automated vehicles request an immediate vehicle control take-over? In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct Proceedings, Utrecht, The Netherlands, 21–25 September 2019. [Google Scholar]
- Lee, J.; Yang, J.H. Analysis of Driver’s EEG Given Take-Over Alarm in SAE Level 3 Automated Driving in a Simulated Environment. Int. J. Automot. Technol. 2020, 21, 719–728. [Google Scholar] [CrossRef]
- Meschtscherjakov, A.; Döttlinger, C.; Rödel, C.; Tscheligi, M. ChaseLight: Ambient LED Stripes to Control Driving Speed. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015. [Google Scholar]
- Yang, Y.; Karakaya, B.; Dominioni, G.C.; Kawabe, K.; Bengler, K. An HMI Concept to Improve Driver’s Visual Behavior and Situation Awareness in Automated Vehicle. In Proceedings of the 2018 IEEE International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Roche, F.; Brandenburg, S. Should the Urgency of Visual-Tactile Takeover Requests Match the Criticality of Takeover Situations? IEEE Trans. Intell. Veh. 2020, 5, 306–313. [Google Scholar] [CrossRef]
- Baldwin, C.L. Verbal collision avoidance messages during simulated driving: Perceived urgency, alerting effectiveness and annoyance. Ergonomics 2011, 54, 328–337. [Google Scholar] [CrossRef] [PubMed]
- Politis, I.; Brewster, S.; Pollick, F. Language-based multimodal displays for the handover of control in autonomous cars. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015. [Google Scholar]
- Bazilinskyy, P.; de Winter, J.C.F. Analyzing crowdsourced ratings of speech-based take-over requests for automated driving. Appl. Erg. 2017, 64, 56–64. [Google Scholar] [CrossRef]
- Ljungberg, J.K.; Parmentier, F.B.R.; Hughes, R.W.; Macken, W.J.; Jones, D.M. Listen Out! Behavioural and Subjective Responses to Verbal Warnings. Appl. Cogn. Psychol. 2012, 26, 451–461. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; Petermeijer, S.M.; Petrovych, V.; Dodou, D.; de Winter, J.C.F. Take-over requests in highly automated driving: A crowdsourcing survey on auditory, vibrotactile, and visual displays. Transp. Res. Part F Traffic Psychol. Behav. 2018, 56, 82–98. [Google Scholar] [CrossRef]
- Richie, E.; Offer-Westort, T.; Shankar, R.; Jeon, M. Auditory Displays for Take-Over in Semi-automated Vehicles. In Digital Human Modeling. Applications in Health, Safety, Ergonomics, and Risk Management; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; Chapter 51; pp. 623–634. [Google Scholar]
- Borojeni, S.S.; Wallbaum, T.; Heuten, W.; Boll, S. Comparing Shape-Changing and Vibro-Tactile Steering Wheels for Take-Over Requests in Highly Automated Driving. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24–27 September 2017. [Google Scholar]
- Petermeijer, S.M.; Winter, J.C.F.D.; Bengler, K.J. Vibrotactile Displays: A Survey with a View on Highly Automated Driving. IEEE Trans. Intell. Transp. Syst. 2016, 17, 897–907. [Google Scholar] [CrossRef]
- Petermeijer, S.M.; Cieler, S.; de Winter, J.C.F. Comparing spatially static and dynamic vibrotactile take-over requests in the driver seat. Accid. Anal. Prev. 2017, 99 Pt A, 218–227. [Google Scholar] [CrossRef]
- Cohen-Lazry, G.; Katzman, N.; Borowsky, A.; Oron-Gilad, T. Directional tactile alerts for take-over requests in highly-automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 217–226. [Google Scholar] [CrossRef]
- Stevenson, R.J. Olfactory perception, cognition, and dysfunction in humans. Wiley Interdiscip. Rev. Cogn. Sci. 2013, 4, 273–284. [Google Scholar] [CrossRef]
- Tang, Q.; Guo, G.; Zhang, Z.; Zhang, B.; Wu, Y. Olfactory Facilitation of Takeover Performance in Highly Automated Driving. Hum. Factors 2021, 63, 553–564. [Google Scholar] [CrossRef]
- Meng, F.; Spence, C. Tactile warning signals for in-vehicle systems. Accid. Anal. Prev. 2015, 75, 333–346. [Google Scholar] [CrossRef] [PubMed]
- Bodnar, A.; Corbett, R.; Nekrasovski, D. AROMA: Ambient awareness through olfaction in a messaging application. In Proceedings of the 6th International Conference on Multimodal Interfaces, ICMI 2004, State College, PA, USA, 13–15 October 2004. [Google Scholar]
- Wintersberger, P.; Dmitrenko, D.; Schartmüller, C.; Frison, A.K.; Maggioni, E.; Obrist, M.; Riener, A. S(C)Entinel-Montoring Automated Vehicles with Olfactory Reliability Displays. In Proceedings of the 24th International Conference on Intelligent User Interfaces, Marina del Ray, CA, USA, 17–20 March 2019. [Google Scholar]
- Petermeijer, S.; Bazilinskyy, P.; Bengler, K.; de Winter, J. Take-over again: Investigating multimodal and directional TORs to get the driver back into the loop. Appl. Ergon. 2017, 62, 204–215. [Google Scholar] [CrossRef] [PubMed]
- Politis, I.; Brewster, S.; Pollick, F. Using Multimodal Displays to Signify Critical Handovers of Control to Distracted Autonomous Car Drivers. Int. J. Mob. Hum. Comput. Interact. 2017, 9, 1–16. [Google Scholar] [CrossRef]
- Marcano, M.; Diaz, S.; Perez, J.; Irigoyen, E. A Review of Shared Control for Automated Vehicles: Theory and Applications. IEEE Trans. Hum. Mach. Syst. 2020, 50, 475–491. [Google Scholar] [CrossRef]
- Li, Y.; Lv, C.; Xue, J. A Novel Predictive Haptic Control Interface for Automation-to-Human Takeover of Automated Vehicles. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium, Paris, France, 9–12 June 2019. [Google Scholar]
- Okada, K.; Sonoda, K.; Wada, T. Transferring From Automated to Manual Driving When Traversing a Curve via Haptic Shared Control. IEEE Trans. Intell. Veh. 2021, 6, 266–275. [Google Scholar] [CrossRef]
- de Winter, J.C.F.; Petermeijer, S.M.; Abbink, D.A. Shared control versus traded control in driving: A debate around automation pitfalls. Ergonomics 2023, 66, 1494–1520. [Google Scholar] [CrossRef]
- Ma, S.; Zhang, W.; Yang, Z.; Kang, C.; Wu, C.; Chai, C.; Shi, J.; Zeng, Y.; Li, H. Take over Gradually in Conditional Automated Driving: The Effect of Two-stage Warning Systems on Situation Awareness, Driving Stress, Takeover Performance, and Acceptance. Int. J. Hum.–Comput. Interact. 2020, 37, 352–362. [Google Scholar] [CrossRef]
- Zhang, W.; Zeng, Y.; Yang, Z.; Kang, C.; Wu, C.; Shi, J.; Ma, S.; Li, H. Optimal Time Intervals in Two-Stage Takeover Warning Systems with Insight Into the Drivers’ Neuroticism Personality. Front. Psychol. 2021, 12, 601536. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interaction Types | Strengths | Cons |
|---|---|---|
| Visual (type of icon) | Can be visually displayed on the display device [80] | Easy to cause driver distraction, may miss TOR [80,86] |
| Vision (LED surround type) | Ability to hold the driver’s distracted attention [84,85] | Due to the large impact of ambient light and frequent flashing, it is easy for the driver to ignore the LED prompt [84,85] |
| Listening (speech class) | Reminders clear and clear | In a distracted state, emotional audible cues consume more attention resources [90] |
| The sense of touch | The speed at which information is transmitted | The content of the information delivered is limited and susceptible to driver habits [96] |
| Smell (air body) | Effective to increase driver alertness [80] | It requires professional training to quickly recognize what it represents [98,101] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, H.; Qiu, H.; Zhou, Y.; Deng, Y. Analysis of Influencing Factors of Level 3 Automated Vehicle Takeover: A Literature Review. Sustainability 2024, 16, 8345. https://doi.org/10.3390/su16198345
Guo H, Qiu H, Zhou Y, Deng Y. Analysis of Influencing Factors of Level 3 Automated Vehicle Takeover: A Literature Review. Sustainability. 2024; 16(19):8345. https://doi.org/10.3390/su16198345
Chicago/Turabian StyleGuo, Hanying, Haoyu Qiu, Yongjiang Zhou, and Yuxin Deng. 2024. "Analysis of Influencing Factors of Level 3 Automated Vehicle Takeover: A Literature Review" Sustainability 16, no. 19: 8345. https://doi.org/10.3390/su16198345
APA StyleGuo, H., Qiu, H., Zhou, Y., & Deng, Y. (2024). Analysis of Influencing Factors of Level 3 Automated Vehicle Takeover: A Literature Review. Sustainability, 16(19), 8345. https://doi.org/10.3390/su16198345