

Analysis of Factors Influencing Driver Yielding Behavior at Midblock Crosswalks on Urban Arterial Roads in Thailand


Abstract
1. Introduction
2. Literature Review
2.1. Driver Yielding Behavior
2.2. Contributing Factors to Driver Yielding Behaviors
2.2.1. Roadway Factors
2.2.2. Pedestrian Factors
2.2.3. Traffic Factors
2.2.4. Environmental Factors
3. Research Methodology
3.1. Scope of This Study
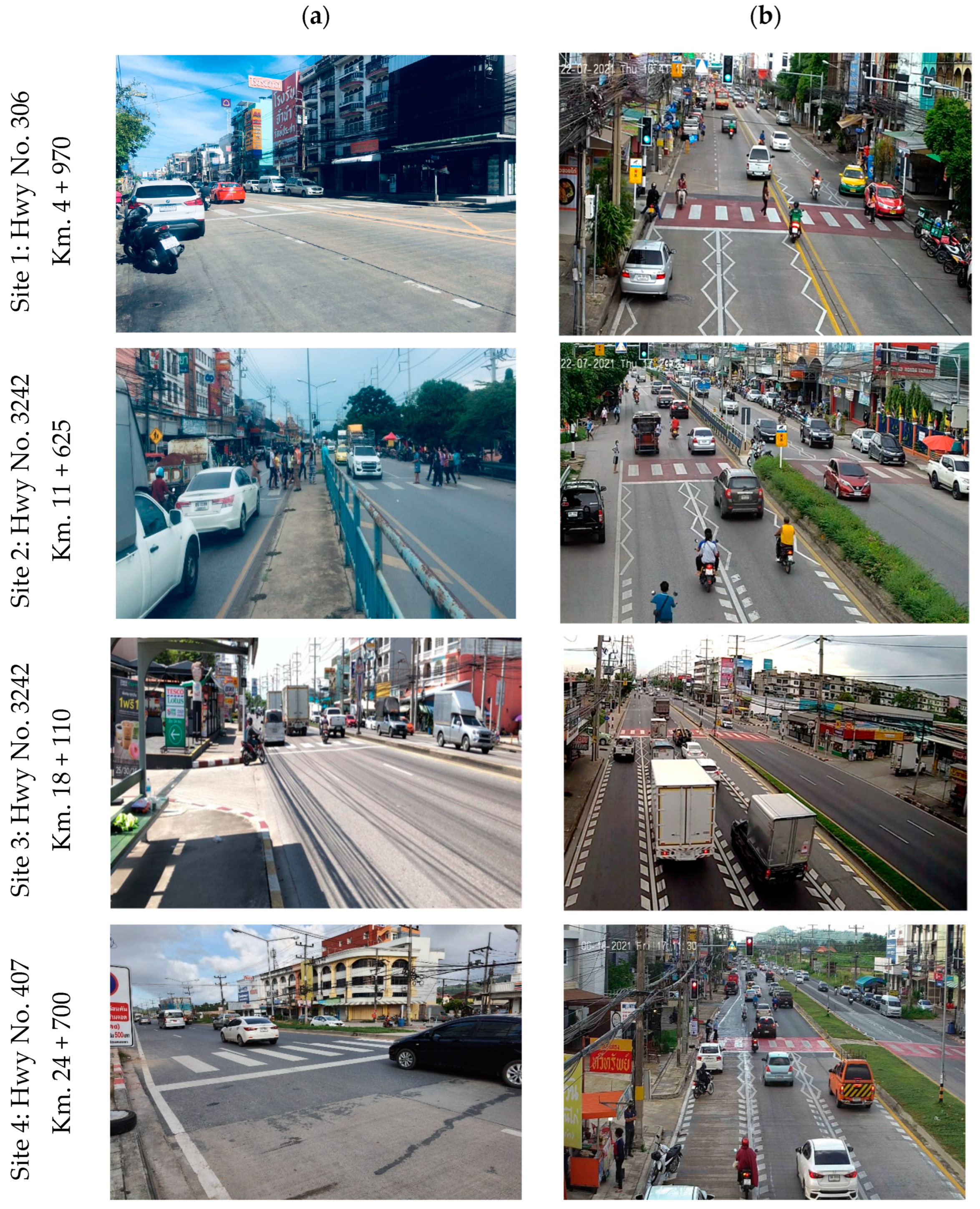
3.1.1. Study Areas
3.1.2. Types of Crosswalks
3.2. Data Collection
3.2.1. Driver Yielding Behavior
3.2.2. Roadway Characteristics
3.2.3. Pedestrian Characteristics
3.2.4. Traffic Characteristics
3.2.5. Summary of Variables in Driver Yielding Behavior Modeling
3.3. Data Analysis
3.3.1. Descriptive Statistics of Observation Variables
3.3.2. Yielding Behavior Modeling
4. Results and Discussion
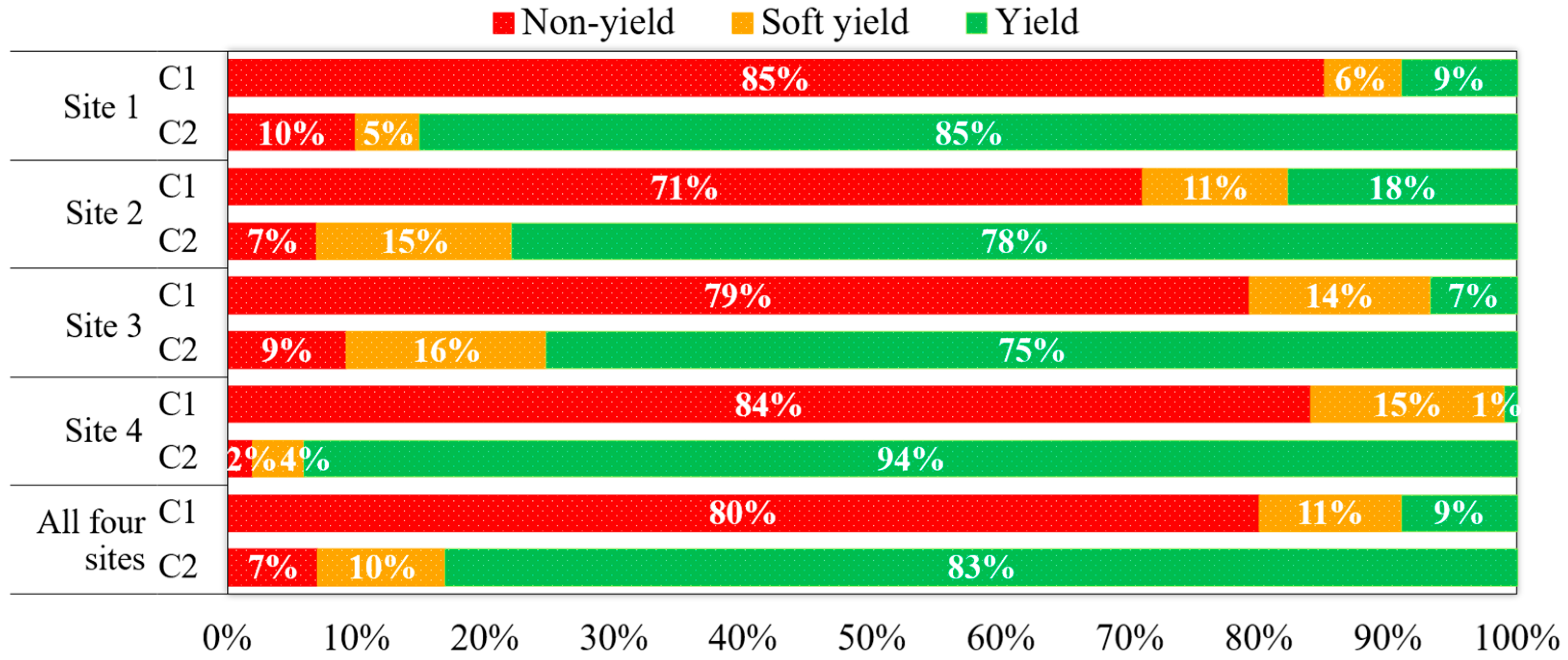
4.1. Distribution of Driver Yielding Behavior
4.2. Results of Descriptive Statistics of Observed Variables
4.3. Factors Influencing Driver Yielding Behavior
5. Conclusions and Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chaudhari, A.; Gore, N.; Arkatkar, S.; Joshi, G.; Pulugurtha, S. Exploring pedestrian surrogate safety measures by road geometry at midblock crosswalks: A perspective under mixed traffic conditions. IATSS Res. 2020, 45, 87–101. [Google Scholar] [CrossRef]
- World Health Organization (WHO). Pedestrian Safety: A Road Safety Manual for Decision-Makers and Practitioners; World Health Organization: Geneva, Switzerland, 2013; Available online: https://www.who.int/publications/i/item/pedestrian-safety-a-road-safety-manual-for-decision-makers-and-practitioners (accessed on 25 October 2023).
- World Health Organization (WHO). Global Status Report on Road Safety 2018; WHO: Geneva, Switzerland, 2018; Available online: https://www.who.int/publications/i/item/9789241565684 (accessed on 25 October 2023).
- World Health Organization (WHO). Global Status Report on Road Safety 2023; WHO: Geneva, Switzerland, 2023; Available online: https://www.who.int/publications/i/item/9789240086517 (accessed on 25 October 2023).
- Department of Highways. Traffic Accidents on National Highways; Bureau of Highway Safety, Department of Highways, Ministry of Transport: Thailand, Bangkok, 2022. Available online: http://bhs.doh.go.th/download/accident (accessed on 30 October 2023).
- Department of Disease Control. Road Accident Fatalities 2011–2022; Road Accident Fatalities Integration System (3 Bases); Injury Prevention Division, Department of Disease Control: Bangkok, Thailand, 2022.
- Bangkok Post Public Company Limited. Cop Charged with Reckless Driving, Causing Female Doctor’s Death. Available online: https://www.bangkokpost.com/thailand/general/2252131 (accessed on 21 April 2024).
- United Nations Thailand. The Sustainable Development Goals in Thailand/Good Health and Well-Being. Available online: https://thailand.un.org/en/sdgs/3 (accessed on 21 April 2024).
- Road Safety Administration Center. Thailand Road Safety Master Plan 2022–2027; Department of Disaster Prevention and Mitigation, Ministry of Interior: Bangkok, Thailand, 2023.
- Department of Highways. A Study on Guidelines for the Installation of Safe Pedestrian Crossings; Bureau of Highway Safety, Department of Highways, Ministry of Transport: Bangkok, Thailand, 2023. Available online: http://www.doh.go.th/project/detail/66334 (accessed on 30 October 2023).
- Federal Highway Administration (FHWA). Guide for Improving Pedestrian Safety at Uncontrolled Crossing Locations; Report No. FHWA-SA-17-072; FWHA: Washington, DC, USA, 2018.
- Schneider, J.; Sanders, L. Pedestrian safety practitioners’ perspectives of driver yielding behavior across North America. Transp. Res. Rec. 2015, 2519, 39–50. [Google Scholar] [CrossRef]
- Siddiqui, A.; Chu, X.; Guttenplan, M. Crossing locations, light conditions, and pedestrian injury severity. Transp. Res. Rec. J. Transp. Res. Board 2006, 1982, 141–149. [Google Scholar] [CrossRef]
- Barton, B.K.; Kologi, S.M.; Siron, A. Distracted pedestrians in crosswalks: An application of the theory of planned behavior. Transp. Res. Part F 2016, 37, 129–137. [Google Scholar] [CrossRef]
- Zegeer, V.; Stewart, R.; Huang, H.; Lagerwey, P. Safety Effects of Marked versus Unmarked Crosswalks at Uncontrolled Locations; Final Report and Recommended Guidelines; Report no. FHWA-HRT-04-100; Federal Highway Administration: Washington, DC, USA, 2005.
- Papantoniou, P.; Yannis, G.; Christofa, E. Which factors lead to driving errors? A structural equation model analysis through a driving simulator experiment. IATSS Res. 2019, 43, 44–50. [Google Scholar] [CrossRef]
- Zegeer, V. Development of Crash Modification Factors for Uncontrolled Pedestrian Crossing Treatments; Report no. 841; NCHRP: Washington, DC, USA, 2017. [Google Scholar]
- Pechteep, P.; Luathep, P.; Kronprasert, N.; Jaensirisak, S. Safety effectiveness of an upgraded midblock pedestrian crossing on an urban arterial road. Asia-Pac. J. Sci. Technol. (APST) 2023, 28, 1–12. [Google Scholar]
- Pechteep, P.; Luathep, P.; Kronprasert, N.; Jaensirisak, S. Effectiveness of intelligent signalized pedestrian crossing at midblock locations on urban arterial roads in Thailand. In Proceedings of the 15th International Conference of Eastern Asia Society for Transportation Studies, Kuala Lumpur, Malaysia, 4–7 September 2023. [Google Scholar]
- Turner, S.; Fitzpatrick, K.; Brewer, M.; Park, S. Motorist Yielding to Pedestrians at Unsignalized Intersections: Findings from a National Study on Improving Pedestrian Safety. Transp. Res. Rec. 2006, 1982, 1–12. [Google Scholar] [CrossRef]
- Goddard, T.; Kahn, B.; Adkins, A. Racial bias in driver yielding behavior at crosswalks. Transp. Res. Part F Traffic Psychol. Behav. 2015, 33, 1–6. [Google Scholar] [CrossRef]
- Sogbe, E. An investigation into drivers’ yielding behaviour at marked uncontrolled pedestrian crossings in Ghana. IATSS Res. 2024, 48, 100–107. [Google Scholar] [CrossRef]
- Zhuang, X.; Wu, C. Pedestrian gestures increase driver yielding at uncontrolled mid-block road crossings. Accid. Anal. Prev. 2014, 70, 235–244. [Google Scholar] [CrossRef]
- Yannis, G.; Nikolaou, D.; Laiou, A.; Stürmer, Y.; Buttler, I.; Jankowska-Karpa, D. Vulnerable Road users: Cross-cultural perspectives on performance and attitudes. IATSS Res. 2020, 44, 220–229. [Google Scholar] [CrossRef]
- Dinh, D.; Vũ, N.; McIlroy, R.; Plant, K.; Stanton, N. Effect of attitudes towards traffic safety and risk perceptions on pedestrian behaviours in Vietnam. IATSS Res. 2020, 44, 238–247. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Brewer, A.; Avelar, R. Driver yielding at traffic control signals, pedestrian hybrid beacons, and rectangular rapid-flashing beacons in Texas. Transp. Res. Rec. J. Transp. Res. Board 2014, 2463, 46–54. [Google Scholar] [CrossRef]
- Porter, E.; Neto, I.; Balk, I.; Jenkins, K. Investigating the effects of Rectangular Rapid Flash Beacons on pedestrian behavior and driver yielding on 25 mph streets: A quasi-experimental field study on a university campus. Transp. Res. Part F 2016, 42, 509–521. [Google Scholar] [CrossRef]
- Zheng, Y.; Chase, T.; Elefteriadou, L.; Schroeder, B.; Sisiopiku, P. Modeling vehicle-pedestrian interactions outside crosswalks. Simul. Model. Pract. Theory 2015, 59, 89–101. [Google Scholar] [CrossRef]
- Govindaa, L.; Abhignab, D.; Nairc, M.; Shankar, R. Comparative Study of Pedestrian Crossing Behaviour at Uncontrolled Intersection and Midblock Locations. Transp. Res. Procedia 2020, 48, 698–706. [Google Scholar] [CrossRef]
- Anciaes, P.; Guardo, D.; Jones, P. Factors explaining driver yielding behaviour towards pedestrians at courtesy crossings. Transp. Res. Part F 2020, 73, 453–469. [Google Scholar] [CrossRef]
- Torres, C.; Sobreira, L.; Castro-Neto, M.; Cunto, F.; Vecino-Ortiz, A.; Allen, K.; Hyder, A.; Bachani, A. Evaluation of pedestrian behavior on mid-block crosswalks: A case study in Fortalezad-Brazil. Front. Sustain. Cities 2020, 2, 3. [Google Scholar] [CrossRef]
- Kadali, R.; Vedagir, P. Role of number of traffic lanes on pedestrian gap acceptance and risk taking behaviour at uncontrolled crosswalk locations. J. Transp. Health 2020, 19, 100950. [Google Scholar] [CrossRef]
- Olszewski, P.; Szagałaa, P.; Wolanski, M.; Zielinska, A. Pedestrian fatality risk in accidents at unsignalized zebra crosswalks in Poland. Accid. Anal. Prev. 2015, 84, 83–91. [Google Scholar] [CrossRef]
- Bendak, S.; Alnaqbi, M.; Alzarooni, Y.; Aljanaahi, M.; Alsuwaidi, J. Factors affecting pedestrian behaviors at signalized crosswalks: An empirical study. J. Saf. Res. 2021, 76, 269–275. [Google Scholar] [CrossRef]
- Tezcan, O.; Elmorssy, M.; Aksoy, G. Pedestrian crossing behavior at midblock crosswalks. J. Saf. Res. 2019, 71, 49–57. [Google Scholar] [CrossRef]
- Sucha, M.; Dostal, D.; Risser, R. Pedestrian-driver communication and decision strategies at marked crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef]
- Figliozzi, A.; Tipagornwong, C. Pedestrian Crosswalk Law: A study of traffic and trajectory factors that affect non-compliance and stopping distance. Accid. Anal. Prev. 2016, 96, 169–179. [Google Scholar] [CrossRef]
- Bella, F.; Ferrante, C. Drivers’ Yielding Behavior in Different Pedestrian Crossing Configurations: A Field Survey. J. Adv. Transp. 2021, 2021, 8874563. [Google Scholar] [CrossRef]
- Avinasha, C.; Goreb, N.; Shriniwasc, A.; Gaurangd, J.; Manoranjan, P. Choice crossing behaviour model for Safety Margin of pedestrian at mid-blocks in India. Transp. Res. Procedia 2020, 48, 2329–2342. [Google Scholar] [CrossRef]
- European Commission. Road Safety in the European Union: Trends, Statistics, and Main Challenges. 2018. Available online: https://road-safety.transport.ec.europa.eu/system/files/2021-07/vademecum_2018.pdf (accessed on 29 October 2023).
- Schneider, J.; Sanatizadeh, A.; Shaon, R.; He, Z.; Qin, X. Exploratory analysis of driver yielding at low-speed, uncontrolled crosswalks in Milwaukee, Wisconsin. Transp. Res. Rec. 2018, 2672, 21–32. [Google Scholar] [CrossRef]
- Garder, E. The impact of speed and other variables on pedestrian safety in Maine. Accid. Anal. Prev. 2004, 36, 533–542. [Google Scholar] [CrossRef]
- Huang, F.; Stewart, R.; Zegeer, V. Evaluation of lane reduction “road diet” measures on crashes and injuries. Transp. Res. Rec. 2002, 1784, 80–90. [Google Scholar] [CrossRef]
- Zegeer, V.; Bushell, M. Pedestrian crash trends and potential countermeasures from around the world. Accid. Anal. Prev. 2012, 44, 3–11. [Google Scholar] [CrossRef]
- Martin, A. Factors Influencing Pedestrian Safety: A Literature Review; TRL: Wokingham, UK, 2006. [Google Scholar]
- Koh, P.; Wong, D.; Chandrasekar, P. Safety evaluation of pedestrian behavior and violations at signalized pedestrian crossings. Saf. Sci. 2014, 70, 143–152. [Google Scholar] [CrossRef]
- Alina, B.; Karla, C. Who is Safer on the Road, Men or Women? Transport for Development. 2021. Available online: https://www.blogs.worldbank.org/en/transport/who-safer-road-men-or-women (accessed on 25 October 2023).
- Dileep, R.; Koshy, I.; Sam, S. Study on driver yielding to pedestrians at unsignalized crosswalks. Int. J. Sci. Eng. Res. 2016, 7, 306–311. [Google Scholar]
- Tankasem, P.; Satiennam, T.; Satiennam, W.; Jaensirisak, S.; Rujopakarn, W. Effects of automated speed control on speeding intention and behavior on mixed-traffic urban arterial roads. IATSS Res. 2022, 46, 492–498. [Google Scholar] [CrossRef]
- Nikolaou, D.; Ntontis, A.; Michelaraki, E.; Ziakopoulos, A.; Yannis, G. Pedestrian safety attitudes and self-declared behaviour in Greece. IATSS Res. 2023, 47, 14–24. [Google Scholar] [CrossRef]
- Kröyer, H. Is 30 km/h a ‘safe’ speed? Injury severity of pedestrians struck by a vehicle and the relation to travel speed and age. IATSS Res. 2015, 39, 42–50. [Google Scholar] [CrossRef]
- Tanishita, M.; Sekiguchi, Y.; Sunaga, D. Impact analysis of road infrastructure and traffic control on the severity of pedestrian-vehicle crashes at intersections and non-intersections using bias-reduced logistic regression. IATSS Res. 2023, 47, 233–239. [Google Scholar] [CrossRef]
- Dinh, D.; Kubota, H. Drivers’ perceptions regarding speeding and driving on urban residential streets with a 30 km/h speed limit. IATSS Res. 2013, 37, 30–38. [Google Scholar] [CrossRef]
- Singh, M.; Pathivada, B.; Rao, K.; Perumal, V. Driver behaviour modelling of vehicles at signalized intersection with heterogeneous traffic. IATSS Res. 2022, 46, 236–246. [Google Scholar] [CrossRef]
- Yoh, K.; Okamoto, T.; Inoi, H.; Doi, K. Comparative study on foreign drivers’ characteristics using traffic violation and accident statistics in Japan. IATSS Res. 2017, 41, 94–105. [Google Scholar] [CrossRef]
- Washington, P.; Karlaftis, G.; Mannering, F.L. Statistical and Econometric Methods for Transportation Data Analysis; CRC Press Company: Boca Raton, FL, USA, 2003. [Google Scholar]
- Washington, S. Iteratively specified tree-based regression models: Theoretical development and example applied to trip generation. J. Transp. Eng. 2000, 126, 482–491. [Google Scholar] [CrossRef]
- Hosmer, D.; Lemeshow, S. Applied Logistic Regression; Wiley Series in Probability and Statistics; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- McFadden, D. Conditional logit analysis of qualitative choice behavior. In Frontiers in Economics; Academic Press: Cambridge, MA, USA, 1974; pp. 105–142. ISBN 0-12-776150-0. [Google Scholar]
- McFadden, D.; Train, K. Mixed MNL models for discrete response. J. Appl. Econom. 2000, 15, 447–470. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Authors | Methods | Number of Midblock Crosswalks | Factors | |||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Roadway | Pedestrian | Traffic | Environmental | |||||||||||||||||||||||||||||||
| Linear Regression | Binary Logistic | Logistic Regression | Multinomial Logistic Regression | Modeling the Vehicle-Pedestrian Interactions (vpi) | Type of Crosswalk | Number of Traffic Lanes | Width of a Traffic Lane | Width and Length of Crosswalk | Presence of Pedestrian Refuge Island | Gender | Age | Number of Pedestrian Crossings | Position of Pedestrian Waiting Area | Pedestrian Waiting Time | Pedestrian Crossing Time | Pedestrian Crossing Speed | Pedestrian Behavior While Crossing | Type of Vehicles | Speed of Vehicles | Traffic Volume | Traffic Density | Stopping Distance | Cycle Time of Traffic Signal | Vehicle Headway | Post-Encroachment Time (Pet) | Presence of Roadside Parking | Presence of Bus Stops | Crosswalk Environment | Lighting Condition | Land Use | Time of Day | Day of Week | ||
| Fitzpatrick et al. [26] | - | - | √ | - | - | 7 | * | * | - | * | * | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | * | - | - | - | - |
| Porter et al. [27] | - | - | √ | - | - | 2 | - | * | - | * | * | * | * | * | * | - | - | - | - | * | - | * | - | - | - | - | - | - | - | - | - | - | - | - |
| Zheng et al. [28] | - | - | - | - | √ | 19 | * | - | - | * | - | - | - | * | * | - | - | * | - | - | - | * | - | - | - | - | - | - | * | * | - | - | - | - |
| Govindaa et al. [29] | √ | - | - | - | - | 2 | * | - | - | * | - | * | * | * | - | - | - | * | - | - | - | * | - | - | - | - | - | - | - | - | - | * | - | - |
| Anciaes et al. [30] | - | - | √ | - | - | 20 | * | - | - | - | * | * | * | * | - | - | * | - | - | * | * | * | - | - | - | - | - | - | - | - | - | - | * | * |
| Torres et al. [31] | - | - | √ | - | - | 4 | * | - | - | - | - | * | * | * | - | - | * | - | * | - | * | - | - | - | - | - | - | - | - | - | - | - | - | |
| Kadali and Vedagir [32] | - | √ | - | - | - | 8 | - | * | - | - | * | - | - | - | - | * | - | - | * | * | - | - | - | - | - | - | - | - | - | - | - | - | - | - |
| Olszewski et al. [33] | - | - | √ | - | - | 1 | - | - | * | - | - | * | * | - | - | - | - | - | - | - | * | - | - | - | - | - | - | - | - | - | * | - | * | - |
| Bendak et al. [34] | - | - | √ | - | - | 5 | - | * | - | - | - | * | * | * | - | * | - | * | * | - | - | - | - | - | * | - | - | - | - | - | - | - | * | * |
| Tezcan et al. [35] | - | - | - | √ | - | 4 | - | * | - | - | - | * | * | - | * | - | - | - | - | - | - | * | - | - | - | - | - | * | - | - | - | - | - | - |
| Sucha et al. [36] | - | - | √ | - | - | 4 | - | - | - | * | - | - | - | * | - | - | - | - | * | - | * | * | * | - | - | - | - | - | - | - | - | - | - | - |
| Figliozzi and Tipagornwong [37] | - | √ | - | - | - | 1 | - | - | - | - | - | - | - | * | * | - | - | * | - | * | * | * | - | * | - | - | - | - | - | - | - | - | - | - |
| Bella and Ferrante [38] | - | - | √ | - | - | 2 | * | - | - | * | - | - | - | - | * | - | - | - | - | - | * | - | - | - | - | - | - | - | - | - | - | - | - | - |
| Avinasha et al. [39] | - | √ | - | - | 4 | - | * | - | - | - | - | * | - | - | - | - | * | * | * | * | * | - | - | - | - | - | - | - | - | - | * | - | - | |
| This study | - | - | - | √ | - | 4 | √ | √ | √ | √ | √ | √ | - | √ | √ | √ | √ | - | - | √ | √ | - | - | - | - | √ | √ | √ | - | - | - | - | - | - |
| Study Site | Number of Traffic Lanes | Width of the Traffic Lanes (m/Lane) | Width of the Crossing Area (m) | Presence of Pedestrian Refuge Island (m) | Average Traffic Volume (Vehicles per Hour) | Pedestrian Crossings (Persons per Hour) | ||
|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C1 | C2 | |||||
| 1. Hwy No. 306 Km. 4 + 970 | 4 (2 lanes per direction) | 3.5 | 4.0 | No | 4638 | 3985 | 197 | 218 |
| 2. Hwy No. 3242 Km. 11 + 625 | 4 (2 lanes per direction) | 3.0 | 5.5 | Yes (1.3 m) | 6124 | 4802 | 210 | 225 |
| 3. Hwy No. 3242 Km. 18 + 110 | 6 (3 lanes per direction) | 3.5 | 3.0 | Yes (1.8 m) | 4228 | 5874 | 145 | 156 |
| 4. Hwy No. 407 Km. 24 + 700 | 4 (2 lanes per direction) | 3.5 | 6.0 | Yes (3.3 m) | 4552 | 3863 | 190 | 184 |
| Yielding Behavior | Crosswalks | Description |
|---|---|---|
| Non-yield (NY) | C1 | The driver keeps the speed unchanged without yielding to pedestrians crossing at the crosswalk area. |
| C2 | The driver keeps the speed unchanged during the yellow light and runs through the crosswalk during the red light. | |
| Soft yield (SY) | C1 | The driver slows to less than 40 km/h and allows pedestrians to cross. |
| C2 | The driver slows to less than 40 km/h, allows pedestrians to cross when the yellow light is on, and runs through the crosswalk during the red light. | |
| Yield (Y) | C1 | The driver yields to the pedestrian by stopping before the stop lines. |
| C2 | The driver yields to the pedestrian by stopping before the stop lines once the red light is on. |
| Variables | Coding and Description | Type of Variables | References |
|---|---|---|---|
| Dependent variable | |||
| Driver yielding behavior (Y) | 2 = Yield 1 = Soft yield 0 = Non-yield (reference category) | Dichotomous | [20,21,22,23] |
| Independent variable | |||
| Roadway characteristics | |||
| Number of traffic lanes (x1) | Number of traffic lanes in each direction | Continuous | [27,32,34,35,42,43] |
| Width of a traffic lane (m.) (x2) | Average width of traffic lanes in each direction | Continuous | [26] |
| Width of the crosswalk (m.) (x3) | The width of the crosswalk in the study road section | Continuous | [27,28,29,36] |
| Length of the crosswalk (m.) (x4) | Length of the crosswalk in each direction | Continuous | [28] |
| Presence of a pedestrian refuge island (x5) | 1 = Yes 0 = No | Dichotomous | [27,32,33] |
| Pedestrian characteristics | |||
| Vulnerable group (x6) | 1 = Vulnerable group (female, children, and elderly) 0 = Non-vulnerable group (male and adult) | Dichotomous | [27,29,30,31,32,33,34,35,46,47,48] |
| Number of pedestrians (persons/stop-yield) (x7) | The number of pedestrians crossing the designated crosswalk area each time a vehicle yields to them | Continuous | [27,28,29,30,34,36,37] |
| Position of the pedestrian waiting area (x8) | 1 = Sidewalk 0 = Others (shoulder or traffic lane) | Dichotomous | [27,28,35,37] |
| Pedestrian waiting time (s) (x9) | The total time when pedestrian(s) waits at the curbside or median until the traffic is clear for crossing | Continuous | [32,34,36] |
| Pedestrian crossing time (s) (x10) | The total time it takes pedestrian(s) to complete their crossing from one side to the opposite side. This duration does not include the waiting time. | Continuous | [30] |
| Traffic characteristics | |||
| Type of the first vehicle entering a crosswalk area (x11) | 1 = Passenger car (PC) 0 = Motorcycle (MC) | Dichotomous | [27,30,31,32,37,50] |
| Speed of the first vehicle entering a crosswalk (km/h) (x12) | The spot speed of the first vehicle in the platoon passed within 25 m of the stop line at the crosswalk. | Continuous | [30,33,36,37,38,39] |
| Number of vehicles entering a crosswalk (vehicles) (x13) | The number of vehicles passing through the crosswalk in each direction before a pedestrian decides to cross the road | Continuous | [27,28,29,30,31,35,36,37,49] |
| Headway between the first and second vehicles (s) (x14) | The time between the first and second vehicles entering the crosswalk area | Continuous | - |
| PET between the first vehicle and pedestrian (s) (x15) | The time difference between a pedestrian leaving the encroachment area and the first conflicting vehicle entering this area | Continuous | - |
| Roadside parking (x16) | 1 = Yes 0 = No | Dichotomous | [35] |
| Sites | Vehicle Types | 85th Percentile Speeds (km/h) | |||||
|---|---|---|---|---|---|---|---|
| Typical Zebra Crossing (C1) | Smart Pedestrian Crossing (C2) | ||||||
| NY | SY | Y | NY | SY | Y | ||
| Site 1 | MC | 70 | 65 | 58 | 66 | 55 | 41 |
| PC | 89 | 81 | 70 | 74 | 67 | 53 | |
| Site 2 | MC | 72 | 67 | 60 | 64 | 58 | 45 |
| PC | 85 | 77 | 68 | 71 | 64 | 60 | |
| Site 3 | MC | 75 | 70 | 64 | 60 | 50 | 44 |
| PC | 95 | 87 | 79 | 72 | 69 | 55 | |
| Site 4 | MC | 71 | 66 | 61 | 68 | 53 | 47 |
| PC | 90 | 84 | 71 | 70 | 64 | 59 | |
| All four sites | MC | 78 | 72 | 65 | 65 | 58 | 50 |
| PC | 93 | 82 | 75 | 77 | 69 | 61 | |
| Variables | MLR1 | MLR2 | MLR3 | MLR4 | MLR5 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| MLR1(C1) | MLR1(C2) | MLR2(C1) | MLR2(C2) | MLR3(C1) | MLR3(C2) | MLR4(C1) | MLR4(C2) | MLR5(C1) | MLR5(C2) | |
| Vulnerable group (x6) | ||||||||||
| Vulnerable group | 59.1% | 54.8% | 65.2% | 60.3% | 51.6% | 59.8% | 62.8% | 63.8% | 59.7% | 59.7% |
| Non-vulnerable group | 40.8% | 45.2% | 34.8% | 39.7% | 48.3% | 40.2% | 37.1% | 36.2% | 40.3% | 40.3% |
| Position of the pedestrian waiting area (x8) | ||||||||||
| Sidewalk | 66.5% | 70.4% | 69.2% | 76.5% | 75.9% | 77.1% | 58.2% | 78.6% | 67.4% | 75.7% |
| Others (shoulder or traffic lane) | 33.5% | 29.6% | 30.8% | 23.5% | 24.1% | 22.9% | 41.8% | 21.4% | 32.5% | 24.3% |
| Type of the first vehicle entering a crosswalk area (x11) | ||||||||||
| MC | 33.3% | 36.3% | 36.8% | 33.1% | 30.8% | 37.8% | 39.1% | 35.2% | 34.7% | 35.6% |
| PC | 66.7% | 63.7% | 63.2% | 66.9% | 69.2% | 62.2% | 61.9% | 64.8% | 65.2% | 64.4% |
| Roadside parking (x16) | ||||||||||
| Yes | 52.4% | 29.9% | 63.3% | 31.7% | 64.3% | 28.6% | 64.5% | 30.4% | 61.1% | 30.2% |
| No | 47.6% | 70.1% | 36.7% | 68.3% | 35.7% | 71.4% | 35.5% | 69.6% | 38.8% | 69.8% |
| Variables | Average (SD) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MLR1 | MLR2 | MLR3 | MLR4 | MLR5 | ||||||
| MLR1(C1) | MLR1(C2) | MLR2(C1) | MLR2(C2) | MLR3(C1) | MLR3(C2) | MLR4(C1) | MLR4(C2) | MLR5(C1) | MLR5(C2) | |
| Number of pedestrians (persons/ stop-yield) (x7) | 2.8 (0.8) | 3.1 (0.6) | 3.5 (0.7) | 3.7 (0.5) | 2.5 (0.6) | 2.1 (0.8) | 3.6 (0.9) | 3.2 (0.3) | 3.6 (0.7) | 3.3 (0.8) |
| Pedestrian waiting time (s) (x9) | 30.4 (12.1) | 22.1 (10.2) | 25.2 (9.6) | 19.5 (11.6) | 38.5 (10.3) | 30.5 (13.1) | 40.6 (8.9) | 35.2 (13.1) | 29.7 (10.2) | 25.2 (11.7) |
| Pedestrian crossing time (s) (x10) | 45.5 (13.2) | 40.6 (10.7) | 51.8 (12.6) | 53.4 (14.6) | 44.6 (15.2) | 40.1 (12.3) | 48.4 (11.2) | 43.9 (14.4) | 49.6 (13.1) | 44.8 (12.9) |
| Speed of the first vehicle entering a crosswalk (km/h) (x12) | 70 (9.5) | 65 (11.2) | 75 (10.1) | 60 (8.4) | 68 (9.3) | 59 (10.2) | 69 (11.5) | 55 (12.4) | 71 (10.8) | 63 (11.7) |
| - For the case of MC (km/h) | 65.9 (10.2) | 58.1 (15.6) | 63.4 (10.9) | 55.2 (14.7) | 69.5 (10.1) | 60.5 (12.5) | 64.2 (11.4) | 59.7 (10.8) | 65.7 (10.6) | 57.4 (11.9) |
| - For the case of PC (km/h) | 79.8 (12.3) | 65.4 (14.6) | 75.5 (11.4) | 66.8 (12.8) | 85.6 (14.5) | 69.1 (15.6) | 83.7 (11.5) | 68.5 (13.2) | 79.4 (12.4) | 67.5 (13.1) |
| Number of vehicles entering a crosswalk (vehicles) (x13) | 3.5 (0.7) | 2.7 (0.5) | 2.9 (0.6) | 3.4 (0.3) | 2.5 (1.0) | 2.8 (0.7) | 4.5 (1.1) | 3.6 (0.9) | 3.4 (0.8) | 3.1 (0.5) |
| Headway between the first and second vehicles (s) (x14) | 9.7 (8.4) | 10.5 (4.6) | 8.8 (5.8) | 13.5 (4.2) | 4.9 (5.1) | 6.9 (3.9) | 6.0 (3.4) | 8.5 (4.1) | 7.4 (5.6) | 9.2 (4.4) |
| PET between the first vehicle and pedestrian (s) (x15) | 2.1 (0.8) | 3.2 (0.5) | 2.5 (0.7) | 3.6 (1.0) | 2.8 (1.1) | 3.6 (0.9) | 2.0 (0.7) | 3.5 (0.6) | 2.7 (0.9) | 3.7 (1.1) |
| - For the case between MC and pedestrian(s) | 2.4 (0.8) | 3.5 (0.2) | 2.1 (0.9) | 3.3 (0.5) | 3.1 (1.5) | 3.0 (1.0) | 2.6 (1.6) | 3.6 (1.1) | 2.6 (1.2) | 3.5 (0.4) |
| - For the between PC and pedestrian(s) | 1.5 (0.6) | 2.9 (0.3) | 1.4 (0.7) | 3.1 (0.5) | 1.2 (0.8) | 3.2 (0.6) | 1.8 (1.0) | 2.9 (0.8) | 1.4 (0.8) | 3.2 (0.6) |
| Variables | Y vs. NY | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MLR1 | MLR2 | MLR3 | MLR4 | MLR5 | ||||||
| MLR1(C1) | MLR1(C2) | MLR2(C1) | MLR2(C2) | MLR3(C1) | MLR3(C2) | MLR4(C1) | MLR4(C2) | MLR5(C1) | MLR5(C2) | |
| p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | |
| x1 | 0.002 * | 0.001 * | ||||||||
| x2 | 0.003 * | 0.005 * | ||||||||
| x3 | 0.005 * | 0.002 * | ||||||||
| x4 | 0.005 * | 0.008 * | ||||||||
| x5 | 0.147 | 0.138 | ||||||||
| x6 | 0.005 * | 0.009 * | 0.004 * | 0.003 * | 0.010 * | 0.005 * | 0.006 * | 0.005 * | 0.002 * | 0.006 * |
| x7 | 0.001 * | 0.000 * | 0.004 * | 0.000 * | 0.097 | 0.104 | 0.066 | 0.114 | 0.002 * | 0.001 * |
| x8 | 0.047 | 0.087 | 0.125 | 0.214 | 0.185 | 0.118 | 0.068 | 0.105 | 0.124 | 0.091 |
| x9 | 0.145 | 0.548 | 0.227 | 0.077 | 0.114 | 0.214 | 0.098 | 0.254 | 0.274 | 0.314 |
| x10 | 0.004 * | 0.102 | 0.113 | 0.078 | 0.205 | 0.119 | 0.089 | 0.095 | 0.007 * | 0.098 |
| x11 | 0.074 | 0.087 | 0.102 | 0.127 | 0.098 | 0.091 | 0.075 | 0.102 | 0.110 | 0.096 |
| x12 | 0.001 * | 0.003 * | 0.002 * | 0.001 * | 0.005 * | 0.003 * | 0.002 * | 0.001 * | 0.001 * | 0.002 * |
| x13 | 0.004 * | 0.001 * | 0.079 | 0.088 | 0.103 | 0.115 | 0.003 * | 0.007 * | 0.004 * | 0.001 * |
| x14 | 0.005 * | 0.003 * | 0.004 * | 0.001 * | 0.001 * | 0.000 * | 0.007 * | 0.009 * | 0.002 * | 0.001 * |
| x15 | 0.000 * | 0.001 * | 0.001 * | 0.001 * | 0.005 * | 0.001 * | 0.002 * | 0.001 * | 0.001 * | 0.000 * |
| x16 | 0.001 * | 0.010 * | 0.001 * | 0.008 * | 0.003 * | 0.009 * | 0.001 * | 0.002 * | 0.009 * | 0.007 * |
| N | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 1600 | 1600 |
| Variables | SY vs. NY | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MLR1 | MLR2 | MLR3 | MLR4 | MLR5 | ||||||
| MLR1(C1) | MLR1(C2) | MLR2(C1) | MLR2(C2) | MLR3(C1) | MLR3(C2) | MLR4(C1) | MLR4(C2) | MLR5(C1) | MLR5(C2) | |
| p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | p-Value | |
| x1 | 0.005 * | 0.001 * | ||||||||
| x2 | 0.006 * | 0.010 * | ||||||||
| x3 | 0.010 * | 0.008 * | ||||||||
| x4 | 0.009 * | 0.004 * | ||||||||
| x5 | 0.116 | 0.168 | ||||||||
| x6 | 0.003 * | 0.005 * | 0.010 * | 0.010 * | 0.003 * | 0.003 * | 0.008 * | 0.001 * | 0.004 * | 0.001 * |
| x7 | 0.000 * | 0.001 * | 0.000 * | 0.001 * | 0.085 | 0.097 | 0.110 | 0.091 | 0.001 * | 0.005 * |
| x8 | 0.214 | 0.106 | 0.154 | 0.089 | 0.116 | 0.163 | 0.211 | 0.162 | 0.109 | 0.151 |
| x9 | 0.224 | 0.314 | 0.105 | 0.325 | 0.098 | 0.241 | 0.196 | 0.228 | 0.152 | 0.332 |
| x10 | 0.008 * | 0.125 | 0.006 * | 0.154 | 0.224 | 0.174 | 0.096 | 0.104 | 0.005 * | 0.116 |
| x11 | 0.078 | 0.107 | 0.096 | 0.124 | 0.108 | 0.213 | 0.075 | 0.103 | 0.082 | 0.077 |
| x12 | 0.002 * | 0.001 * | 0.000 * | 0.001 * | 0.001 * | 0.000 * | 0.003 * | 0.000 * | 0.001 * | 0.005 * |
| x13 | 0.006 * | 0.009 * | 0.085 | 0.064 | 0.094 | 0.101 | 0.001 * | 0.005 * | 0.004 * | 0.001 * |
| x14 | 0.001 * | 0.002 * | 0.007 * | 0.001 * | 0.002 * | 0.005 * | 0.001 * | 0.007 * | 0.001 * | 0.005 * |
| x15 | 0.000 * | 0.001 * | 0.001 * | 0.003 * | 0.000 * | 0.001 * | 0.000 * | 0.000 * | 0.003 * | 0.002 * |
| x16 | 0.008 * | 0.009 * | 0.004 * | 0.001 * | 0.005 * | 0.007 * | 0.002 * | 0.001 * | 0.008 * | 0.004 * |
| N | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 1600 | 1600 |
| Variables | Y vs. NY | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MLR1 | MLR 2 | MLR 3 | MLR 4 | MLR 5 | ||||||||||||||||
| MLR1(C1) | MLR1(C2) | MLR2(C1) | MLR2(C2) | MLR3(C1) | MLR3(C2) | MLR4(C1) | MLR4(C2) | MLR5(C1) | MLR5(C2) | |||||||||||
| β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | |
| x1 | 0.15 | 0.402 | 0.35 | 0.433 | ||||||||||||||||
| x2 | 0.10 | 0.296 | 0.41 | 0.397 | ||||||||||||||||
| x3 | 0.07 | 0.478 | 0.29 | 0.568 | ||||||||||||||||
| x4 | 0.03 | 0.503 | 0.18 | 0.517 | ||||||||||||||||
| x6 | ||||||||||||||||||||
| Vulnerable group | 0.11 | 0.616 | 0.21 | 0.531 | 0.17 | 0.441 | 0.20 | 0.663 | 0.24 | 0.714 | 0.11 | 0.695 | 0.21 | 0.589 | 0.19 | 0.522 | 0.28 | 0.533 | 0.18 | 0.648 |
| Non-vulnerable group | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | ||||||||||
| x7 | 0.21 | 0.783 | 0.27 | 0.335 | 0.20 | 0.882 | 0.22 | 0.714 | 0.35 | 0.552 | 0.27 | 0.639 | ||||||||
| x10 | 0.18 | 0.528 | 0.28 | 1.225 | 0.11 | 0.684 | ||||||||||||||
| x12 | 0.16 | 0.485 | 0.14 | 0.669 | 0.11 | 0.524 | 0.08 | 0.448 | 0.22 | 0.389 | 0.11 | 0.536 | 0.28 | 0.217 | 0.19 | 0.543 | 0.30 | 0.496 | 0.17 | 0.742 |
| x13 | 0.20 | 0.797 | 0.25 | 0.574 | 0.19 | 0.558 | 0.21 | 0.668 | 0.33 | 0.509 | 0.41 | 0.633 | ||||||||
| x14 | 0.10 | 0.658 | 0.11 | 0.723 | 0.09 | 0.865 | 0.13 | 0.882 | 0.11 | 0.693 | 0.38 | 0.417 | 0.13 | 0.691 | 0.10 | 0.701 | 0.28 | 0.452 | 0.31 | 0.692 |
| x15 | 0.31 | 0.517 | 0.33 | 0.662 | 0.36 | 0.721 | 0.47 | 0.761 | 0.22 | 0.521 | 0.32 | 0.585 | 0.19 | 0.774 | 0.29 | 0.609 | 0.39 | 0.582 | 0.41 | 0.625 |
| x16 | ||||||||||||||||||||
| Yes | 0.38 | 0.114 | 1.00 | 0.663 | 0.30 | 0.396 | 1.12 | 0.528 | 0.27 | 0.721 | 0.38 | 0.663 | 0.26 | 0.554 | 1.07 | 0.654 | 0.28 | 0.482 | 0.31 | 0.658 |
| No | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | ||||||||||
| Intercept | −2.21 | −2.19 | −2.34 | −2.47 | −2.15 | −2.34 | −2.33 | −2.15 | −2.43 | −2.25 | ||||||||||
| −2LL | 1124.41 | 1044.32 | 1109.63 | 1120.54 | 1098.52 | 1077.45 | 1147.22 | 1103.41 | 1058.23 | 1266.20 | ||||||||||
| ρ2 | 0.15 | 0.13 | 0.15 | 0.14 | 0.12 | 0.14 | 0.11 | 0.13 | 0.16 | 0.19 | ||||||||||
| N | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 1600 | 1600 | ||||||||||
| Variables | SY vs. NY | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MLR1 | MLR 2 | MLR 3 | MLR 4 | MLR 5 | ||||||||||||||||
| MLR1(C1) | MLR1(C2) | MLR2(C1) | MLR2(C2) | MLR3(C1) | MLR3(C2) | MLR4(C1) | MLR4(C2) | MLR5(C1) | MLR5(C2) | |||||||||||
| β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | β | OR | |
| x1 | 0.11 | 0.452 | 0.21 | 0.617 | ||||||||||||||||
| x2 | 0.19 | 0.553 | 0.28 | 0.652 | ||||||||||||||||
| x3 | 0.14 | 0.407 | 0.17 | 0.574 | ||||||||||||||||
| x4 | 0.21 | 0.362 | 0.24 | 0.563 | ||||||||||||||||
| x6 | ||||||||||||||||||||
| Non-vulnerable group | 0.18 | 0.358 | 0.17 | 0.452 | 0.21 | 0.392 | 0.15 | 0.448 | 0.19 | 0.641 | 0.25 | 0.520 | 0.21 | 0.440 | 0.20 | 0.351 | 0.25 | 0.459 | 0.33 | 0.667 |
| Vulnerable group | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | ||||||||||
| x7 | 0.17 | 0.524 | 0.34 | 0.471 | 0.18 | 0.338 | 0.10 | 0.525 | 0.35 | 0.471 | 0.32 | 0.574 | ||||||||
| x10 | 0.12 | 0.587 | 0.23 | 1.825 | 0.18 | 0.506 | ||||||||||||||
| x12 | 0.13 | 0.669 | 0.19 | 0.741 | 0.22 | 0.771 | 0.10 | 0.779 | 0.35 | 0.711 | 0.19 | 0.881 | 0.11 | 0.659 | 0.39 | 0.574 | 0.31 | 0.685 | 0.35 | 0.774 |
| x13 | 0.10 | 0.632 | 0.09 | 0.582 | 0.09 | 0.669 | 0.11 | 0.603 | 0.30 | 0.445 | 0.38 | 0.587 | ||||||||
| x14 | 0.11 | 0.509 | 0.11 | 0.552 | 0.13 | 0.505 | 0.13 | 0.471 | 0.09 | 0.679 | 0.10 | 0.702 | 0.14 | 0.801 | 0.12 | 0.596 | 0.24 | 0.357 | 0.19 | 0.557 |
| x15 | 0.19 | 0.582 | 0.19 | 0.334 | 0.18 | 0.320 | 0.18 | 0.441 | 0.13 | 0.503 | 0.25 | 0.369 | 0.10 | 0.548 | 0.19 | 0.452 | 0.26 | 0.674 | 0.33 | 0.752 |
| x16 | ||||||||||||||||||||
| Yes | 0.14 | 0.665 | 0.14 | 0.745 | 0.15 | 0.521 | 0.10 | 0.632 | 0.10 | 0.407 | 0.18 | 0.433 | 0.13 | 0.663 | 0.12 | 0.479 | 0.28 | 0.441 | 0.39 | 0.570 |
| No | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | ||||||||||
| Intercept | −2.18 | −2.20 | −2.18 | −2.32 | −2.19 | −2.34 | −2.13 | −2.28 | −2.33 | −2.41 | ||||||||||
| −2LL | 1121.36 | 1103.69 | 1064.58 | 1123.02 | 1096.57 | 1077.25 | 1147.20 | 1109.33 | 1085.41 | 1259.36 | ||||||||||
| ρ2 | 0.12 | 0.13 | 0.15 | 0.14 | 0.12 | 0.16 | 0.14 | 0.13 | 0.15 | 0.16 | ||||||||||
| N | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 1600 | 1600 | ||||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pechteep, P.; Luathep, P.; Jaensirisak, S.; Kronprasert, N. Analysis of Factors Influencing Driver Yielding Behavior at Midblock Crosswalks on Urban Arterial Roads in Thailand. Sustainability 2024, 16, 4118. https://doi.org/10.3390/su16104118
Pechteep P, Luathep P, Jaensirisak S, Kronprasert N. Analysis of Factors Influencing Driver Yielding Behavior at Midblock Crosswalks on Urban Arterial Roads in Thailand. Sustainability. 2024; 16(10):4118. https://doi.org/10.3390/su16104118
Chicago/Turabian StylePechteep, Pongsatorn, Paramet Luathep, Sittha Jaensirisak, and Nopadon Kronprasert. 2024. "Analysis of Factors Influencing Driver Yielding Behavior at Midblock Crosswalks on Urban Arterial Roads in Thailand" Sustainability 16, no. 10: 4118. https://doi.org/10.3390/su16104118
APA StylePechteep, P., Luathep, P., Jaensirisak, S., & Kronprasert, N. (2024). Analysis of Factors Influencing Driver Yielding Behavior at Midblock Crosswalks on Urban Arterial Roads in Thailand. Sustainability, 16(10), 4118. https://doi.org/10.3390/su16104118