



Study on Driver-Oriented Energy Management Strategy for Hybrid Heavy-Duty Off-Road Vehicles under Aggressive Transient Operating Condition


Abstract
1. Introduction
- A nonlinear autoregressive with exogenous input (NARX) neural network is trained to recognize the driver’s driving intention and translate it into the expected subsequent vehicle speed trajectory, which will be used as the tracking reference of the MPC controller.
- A nonlinear MPC controller is designed to track the reference vehicle speed and realize energy management. By using MPC, the driving force and engine power are co-optimized, which allows engine power to follow demand power well so that battery current overload is avoided. The penalty weights are used to coordinate the variations in driving force and engine power, which leads to improvement of engine power smoothing and further decrease in transient battery current. The weights in the objective function are adaptively selected according to the vehicle working condition classification to ensure that the demand power variation can match the engine dynamic characteristic under different transient conditions.
- The effectiveness of the proposed strategy is verified through simulation and the hardware-in-the-loop (HiL) test in an actual off-road driving cycle with drastic power fluctuations.
2. Simulation-Oriented Vehicle Model
2.1. Engine Model
2.1.1. Turbocharger Model
2.1.2. Intercooler Model
2.1.3. Intake and Exhaust Manifold Model
2.1.4. Cylinder Model
2.1.5. Engine Model Validation
2.2. Generator and Driving Motor Model
2.3. Battery Model
2.4. Vehicle Longitudinal Dynamics Model
2.5. Control Problem Analysis
2.5.1. Driving Cycle Used for Simulation
2.5.2. Results of Filter-Based Energy Management
3. Co-Optimization-Based Driver-Oriented Energy Management Strategy
3.1. Driving Intention Recognition Using a NARX Neural Network
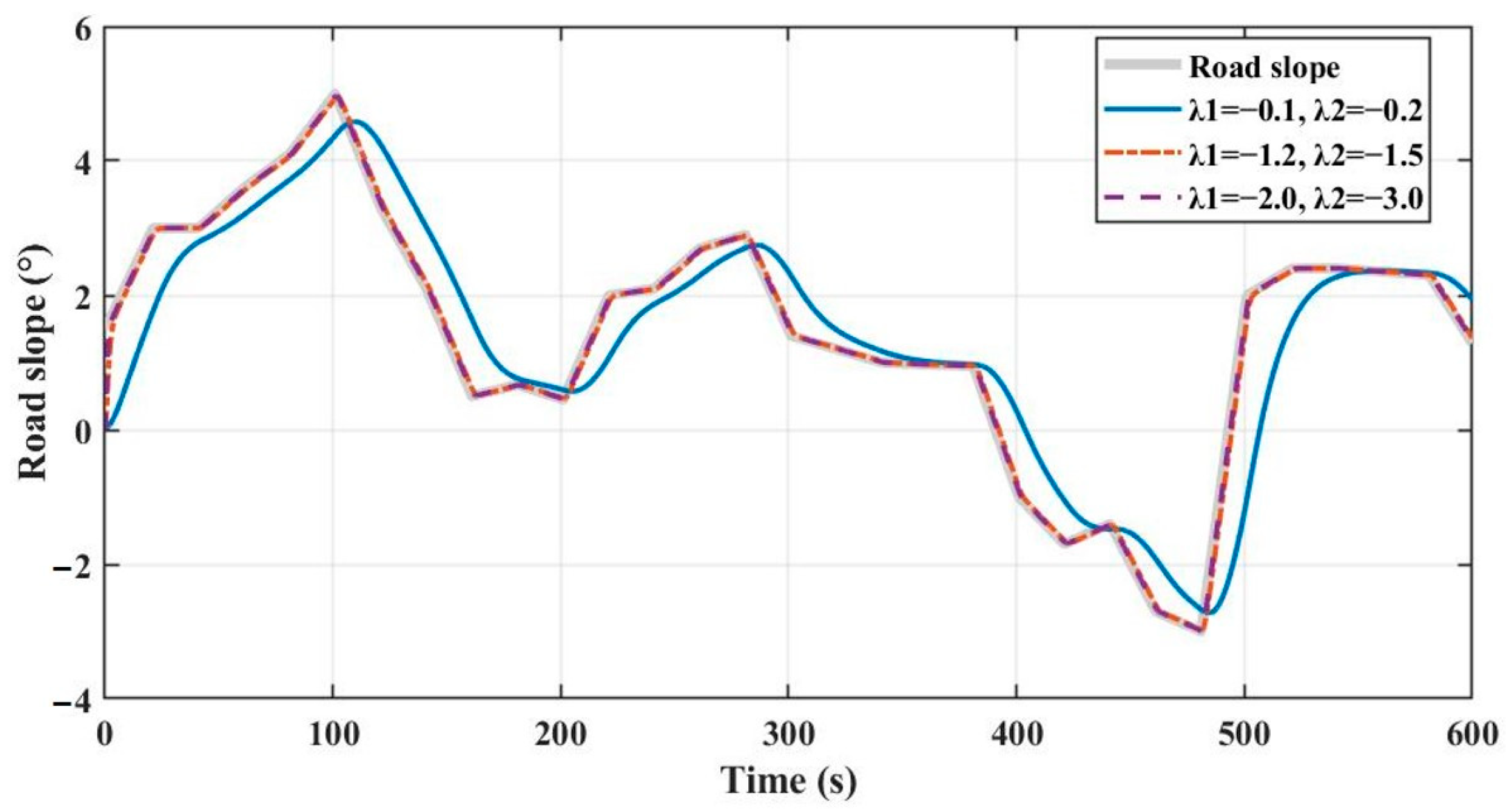
3.2. Road Slope Estimation Based on Luenberger Observer
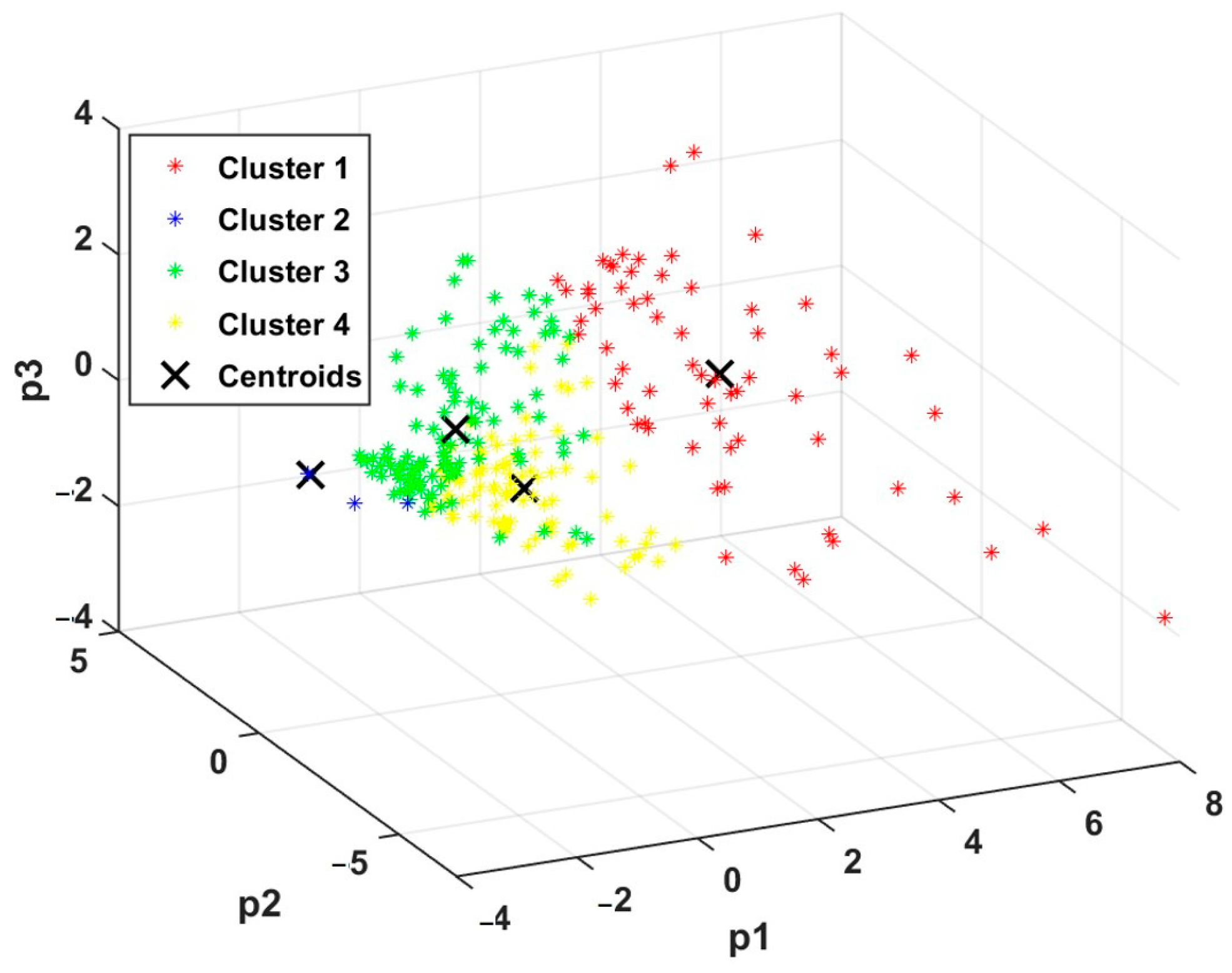
3.3. Working Condition Classification
3.4. MPC Design
4. Results and Analysis
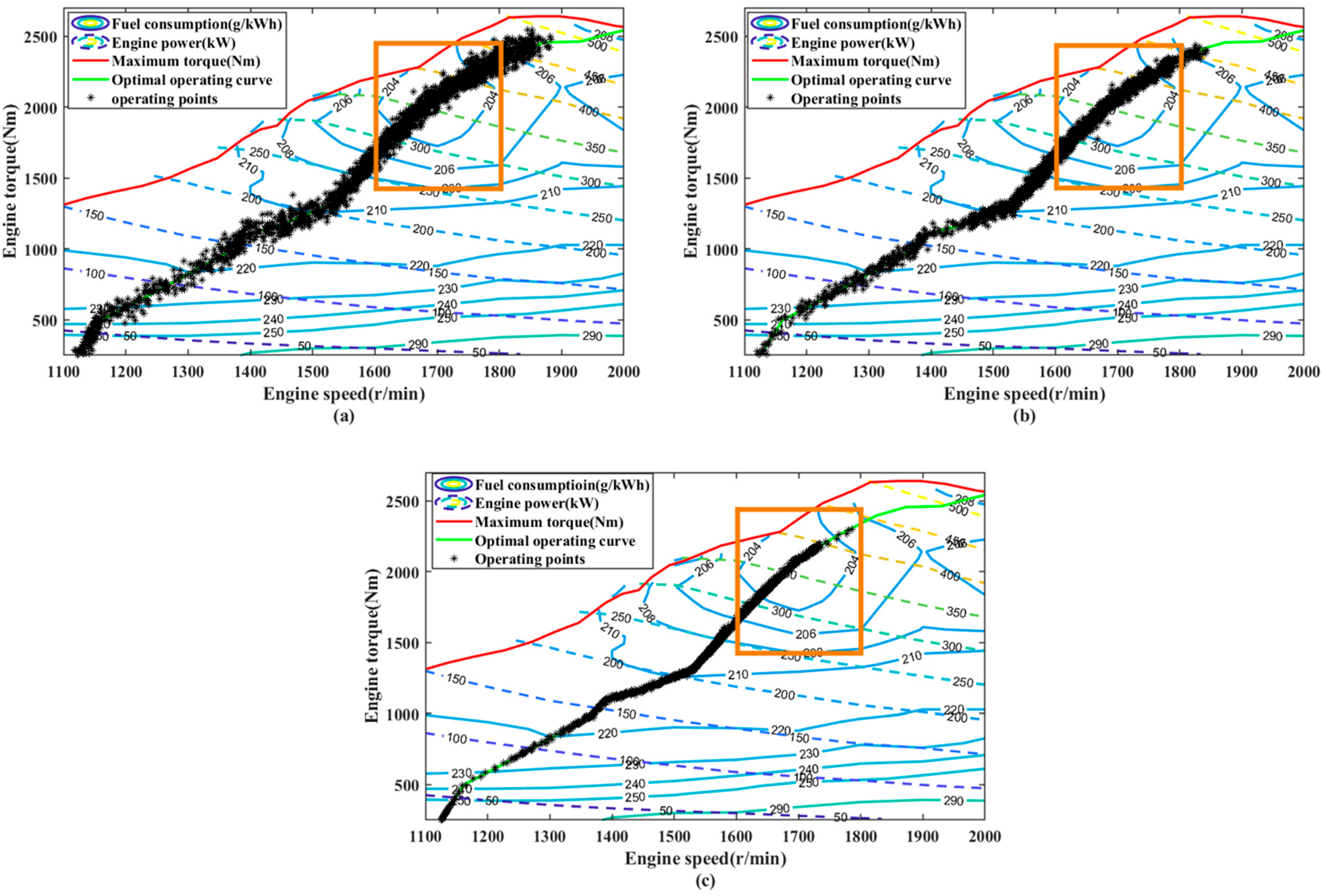
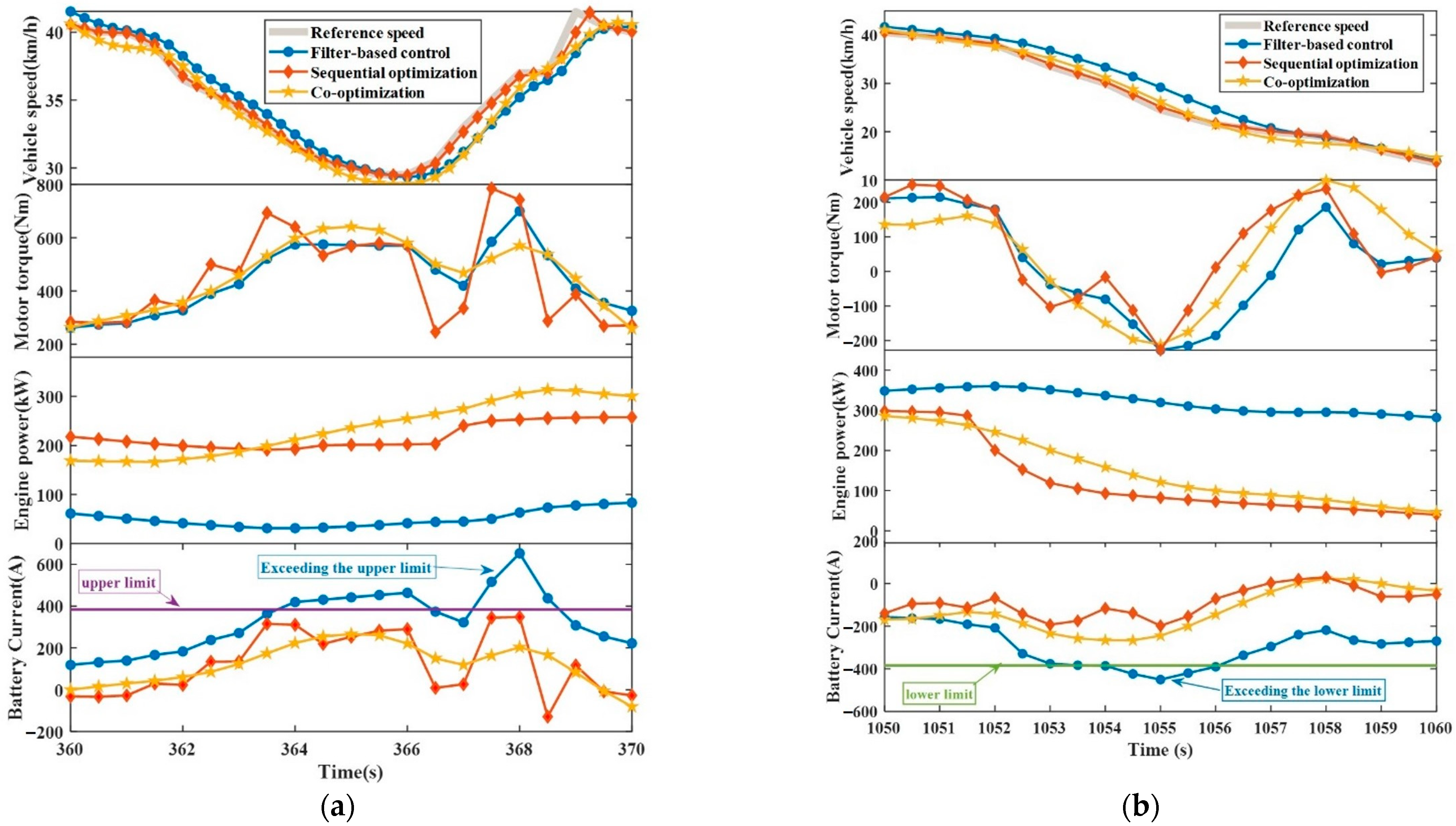
4.1. Simulation Results
4.2. Hardware-in-the-Loop Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Deng, X.; Liu, B.; Ma, J.; Yang, F.; Ouyang, M. Energy management of a parallel hybrid electric vehicle based on Lyapunov algorithm. Etransportation 2022, 13, 100184. [Google Scholar] [CrossRef]
- Di Cairano, S.; Bernardini, D.; Bemporad, A.; Kolmanovsky, I.V. Stochastic MPC With Learning for Driver-Predictive Vehicle Control and its Application to HEV Energy Management. IEEE Trans. Control Syst. Technol. 2014, 22, 1018–1031. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, W.; Yang, Y.; Chen, W. Online Energy Management of Plug-In Hybrid Electric Vehicles for Prolongation of All-Electric Range Based on Dynamic Programming. Math. Probl. Eng. 2015, 2015, 368769. [Google Scholar] [CrossRef]
- Xi, L.; Zhang, X.; Sun, C.; Wang, Z.; Hou, X.; Zhang, J. Intelligent Energy Management Control for Extended Range Electric Vehicles Based on Dynamic Programming and Neural Network. Energies 2017, 10, 1871. [Google Scholar] [CrossRef]
- Yi, F.; Lu, D.; Wang, X.; Pan, C.; Tao, Y.; Zhou, J.; Zhao, C. Energy management strategy for hybrid energy storage electric vehicles based on pontryagin’s minimum principle considering battery degradation. Sustainability 2022, 14, 1214. [Google Scholar] [CrossRef]
- Zeng, T.; Zhang, C.; Zhang, Y.; Deng, C.; Hao, D.; Zhu, Z.; Ran, H.; Cao, D. Optimization-Oriented Adaptive Equivalent Consumption Minimization Strategy Based on Short-Term Demand Power Prediction for Fuel Cell Hybrid Vehicle. Energy 2021, 227, 120305. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; Ye, M.; Zhang, Y.; Li, G. A survey on key techniques and development perspectives of equivalent consumption minimization strategy for hybrid electric vehicles. Renew. Sustain. Energy Rev. 2021, 151, 111607. [Google Scholar] [CrossRef]
- Zhou, Q.; Du, C. A quantitative analysis of model predictive control as energy management strategy for hybrid electric vehicles: A review. Energy Rep. 2021, 7, 6733–6755. [Google Scholar] [CrossRef]
- Du, R.; Hu, X.; Xie, S.; Hu, L.; Zhang, Z.; Lin, X. Battery aging- and temperature-aware predictive energy management for hybrid electric vehicles. J. Power Sources 2020, 473, 228568. [Google Scholar] [CrossRef]
- Jia, C.; Zhou, J.; He, H.; Li, J.; Wei, Z.; Li, K.; Shi, M. A novel energy management strategy for hybrid electric bus with fuel cell health and battery thermal-and health-constrained awareness. Energy 2023, 271, 127105. [Google Scholar] [CrossRef]
- Tang, X.; Yang, K.; Wang, H.; Yu, W.; Yang, X.; Liu, T.; Li, J. Driving Environment Uncertainty-Aware Motion Planning for Autonomous Vehicles. Chin. J. Mech. Eng. (Engl. Ed.) 2022, 35, 120. [Google Scholar] [CrossRef]
- Hu, D.; Cheng, S.; Zhou, J.; Hu, L. Energy Management Optimization Method of Plug-In Hybrid-Electric Bus Based on Incremental Learning. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 7–18. [Google Scholar] [CrossRef]
- Yang, N.; Ruan, S.; Han, L.; Liu, H.; Guo, L.; Xiang, C. Reinforcement learning-based real-time intelligent energy management for hybrid electric vehicles in a model predictive control framework. Energy 2023, 270, 126971. [Google Scholar] [CrossRef]
- Zhou, J.; Feng, C.; Su, Q.; Jiang, S.; Fan, Z.; Ruan, J.; Sun, S.; Hu, L. The Multi-Objective Optimization of Powertrain Design and Energy Management Strategy for Fuel Cell–Battery Electric Vehicle. Sustainability 2022, 14, 6320. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Q.; He, Y.; Shuai, B.; Li, Z.; Williams, H.; Xu, H. Dual-loop online intelligent programming for driver-oriented predict energy management of plug-in hybrid electric vehicles. Appl. Energy 2019, 253, 113617. [Google Scholar] [CrossRef]
- Li, Q.; Cheng, R.; Ge, H. Short-term vehicle speed prediction based on BiLSTM-GRU model considering driver heterogeneity. Phys. A Stat. Mech. Its Appl. 2023, 610, 128410. [Google Scholar] [CrossRef]
- Feng, J.; Han, Z.; Wu, Z.; Li, M. Approximate optimal energy management with a high-precision vehicle speed prediction algorithm. Proc. Inst. Mech. Eng. Part D J. Automob. Eng 2022. [Google Scholar] [CrossRef]
- Hu, Q.; Amini, M.R.; Wiese, A.; Seeds, J.B.; Kolmanovsky, I.; Sun, J. A Multirange Vehicle Speed Prediction With Application to Model Predictive Control-Based Integrated Power and Thermal Management of Connected Hybrid Electric Vehicles. J. Dyn. Syst. Meas. Control 2021, 144, 011105. [Google Scholar] [CrossRef]
- Di Cairano, S.; Liang, W.; Kolmanovsky, I.V.; Kuang, M.L.; Phillips, A.M. Power Smoothing Energy Management and Its Application to a Series Hybrid Powertrain. IEEE Trans. Control Syst. Technol. 2013, 21, 2091–2103. [Google Scholar] [CrossRef]
- Chen, R.; Yang, C.; Han, L.; Wang, W.; Ma, Y.; Xiang, C. Power reserve predictive control strategy for hybrid electric vehicle using recognition-based long short-term memory network. J. Power Sources 2022, 520, 230865. [Google Scholar] [CrossRef]
- Kim, Y.; Ersal, T.; Salvi, A.; Filipi, Z.; Stefanopoulou, A. Engine-in-the-Loop Validation of a Frequency Domain Power Distribution Strategy for Series Hybrid Powertrains. IFAC Proc. Vol. 2012, 45, 432–439. [Google Scholar] [CrossRef]
- Kim, Y.; Salvi, A.; Siegel, J.B.; Filipi, Z.S.; Stefanopoulou, A.G.; Ersal, T. Hardware-in-the-loop validation of a power management strategy for hybrid powertrains. Control Eng. Pract. 2014, 29, 277–286. [Google Scholar] [CrossRef]
- Kim, Y.; Salvi, A.; Stefanopoulou, A.G.; Ersal, T. Reducing Soot Emissions in a Diesel Series Hybrid Electric Vehicle Using a Power Rate Constraint Map. IEEE Trans. Veh. Technol. 2015, 64, 2–12. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Y.; Tang, Y.; Li, Q.; He, H. Cooperative energy management and eco-driving of plug-in hybrid electric vehicle via multi-agent reinforcement learning. Appl. Energy 2023, 332, 120563. [Google Scholar] [CrossRef]
- Hu, J.; Shao, Y.; Sun, Z.; Wang, M.; Bared, J.; Huang, P. Integrated optimal eco-driving on rolling terrain for hybrid electric vehicle with vehicle-infrastructure communication. Transp. Res. Part C Emerg. Technol. 2016, 68, 228–244. [Google Scholar] [CrossRef]
- Tang, X.; Chen, J.; Yang, K.; Toyoda, M.; Liu, T.; Hu, X. Visual Detection and Deep Reinforcement Learning-Based Car Following and Energy Management for Hybrid Electric Vehicles. IEEE Trans. Transp. Electrif. 2022, 8, 2501–2515. [Google Scholar] [CrossRef]
- Heppeler, G.; Sonntag, M.; Sawodny, O. Predictive planning of the battery state of charge trajectory for hybrid-electric passenger cars. In 15. Internationales Stuttgarter Symposium; Springer: Berlin/Heidelberg, Germany, 2015; pp. 525–538. [Google Scholar]
- Heppeler, G.; Sonntag, M.; Wohlhaupter, U.; Sawodny, O. Predictive planning of optimal velocity and state of charge trajectories for hybrid electric vehicles. Control Eng. Pract. 2017, 61, 229–243. [Google Scholar] [CrossRef]
- Kim, Y.; Figueroa-Santos, M.; Prakash, N.; Baek, S.; Siegel, J.B.; Rizzo, D.M. Co-optimization of speed trajectory and power management for a fuel-cell/battery electric vehicle. Appl. Energ. 2020, 260, 114254. [Google Scholar] [CrossRef]
- Li, R.; Huang, Y.; Li, G.; Han, K.; Song, H. Calibration and Validation of a Mean Value Model for Turbocharged Diesel Engine. Adv. Mech. Eng. 2013, 5, 579503. [Google Scholar] [CrossRef]
- Guzzella, L.; Onder, C.H. Introduction to Modeling and Control of Internal Combustion Engine Systems; Springer: Berlin, Germany, 2010. [Google Scholar]
- Chapman, S.J. Electric Machinery Fundamentals; McGraw-Hill: New York, NY, USA, 2004. [Google Scholar]
- Azizi, I.; Radjeai, H. Motor and Regenerative Braking Operations for an Electric Vehicle using Field Oriented Control. In Proceedings of the 2022 19th International Multi-Conference on Systems, Signals & Devices (SSD), Sétif, Algeria, 6-10 May 2022; pp. 2145–2150. [Google Scholar]
- Wang, Y.; Wang, X.; Sun, Y.; You, S. Model predictive control strategy for energy optimization of series-parallel hybrid electric vehicle. J. Clean. Prod. 2018, 199, 348–358. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Curb weight | 30,000 kg |
| Rolling resistance coefficient | 0.1 |
| Frontal area | 4 m2 |
| Drag coefficient | 1 |
| Rotating mass conversion factor | 1.2 |
| Length × width × height | 7.5 m × 3 m × 2 m |
| Engine | 8 V diesel engine; normal power: 550 kW |
| Gear box | Ratio: 1.9 |
| Generator | Permanent magnet synchronous motor; normal power: 500 kW; peak power: 600 kW |
| Motor | Permanent magnet synchronous motor; normal power: 200 kW; peak power: 313 kW |
| Battery | Lithium iron phosphate; layout: 2P246S; capacity: 96 Ah; voltage: 900 V |
| Transmission | Dual-speed mechanical transmission; ratios: 28.78, 12.02 |
| Number | Feature Parameter |
|---|---|
| 1 | Average speed |
| 2 | Maximum speed |
| 3 | Speed span |
| 4 | Average acceleration |
| 5 | Maximum acceleration |
| 6 | Accelerated proportion |
| 7 | Average deceleration |
| 8 | Maximum deceleration |
| 9 | Deceleration proportion |
| 10 | Road slope |
| Working Condition Feature | Example |
|---|---|
| 1 Low power demand (0 < P < 143 kW) |  |
| 2 Parking (P = 0) |  |
| 3 High power demand (435 kW < P < 550 kW) |  |
| 4 Medium power demand (143 kW <P < 435 kW) |  |
| Classification | |||||
|---|---|---|---|---|---|
| 1 | 14 | 10 | 2 | 9 | 4 |
| 2 | 14 | 10 | 2 | 9 | 4 |
| 3 | 13 | 17 | 2 | 11 | 4 |
| 4 | 14 | 15 | 2 | 10 | 4 |
| Engine Speed Standard Deviation | Lowest Fuel Consumption Zone Probability (%) | Fuel Consumption (L) | Final SoC (%) | Equivalent Fuel Consumption (L) | |
|---|---|---|---|---|---|
| Filter-based control | 223.3509 | 42 | 21.06 | 75.80 | 21.058 |
| Sequential optimization | 163.3545 | 53 | 19.96 | 75.05 | 19.959 |
| Co-optimization | 136.9377 | 55 | 19.33 | 75.12 | 19.327 |
| Component | Configuration |
|---|---|
| Real-time target machine | DSPACE PX10 simulation platform |
| VCU | DSPACE MicroAutoBox Ⅱ |
| Target machine host PC | Intel(R) Core(TM) i7-10700 CPU @ 2.90 GHz 32 GB RAM |
| VCU host PC | Intel(R) Core(TM) i5-5200U CPU @ 2.20 GHz 8 GB RAM |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Huang, Y.; Wang, J. Study on Driver-Oriented Energy Management Strategy for Hybrid Heavy-Duty Off-Road Vehicles under Aggressive Transient Operating Condition. Sustainability 2023, 15, 7539. https://doi.org/10.3390/su15097539
Wang X, Huang Y, Wang J. Study on Driver-Oriented Energy Management Strategy for Hybrid Heavy-Duty Off-Road Vehicles under Aggressive Transient Operating Condition. Sustainability. 2023; 15(9):7539. https://doi.org/10.3390/su15097539
Chicago/Turabian StyleWang, Xu, Ying Huang, and Jian Wang. 2023. "Study on Driver-Oriented Energy Management Strategy for Hybrid Heavy-Duty Off-Road Vehicles under Aggressive Transient Operating Condition" Sustainability 15, no. 9: 7539. https://doi.org/10.3390/su15097539
APA StyleWang, X., Huang, Y., & Wang, J. (2023). Study on Driver-Oriented Energy Management Strategy for Hybrid Heavy-Duty Off-Road Vehicles under Aggressive Transient Operating Condition. Sustainability, 15(9), 7539. https://doi.org/10.3390/su15097539