


Sustainability Oriented Vehicle Route Planning Based on Time-Dependent Arc Travel Durations


Abstract
:1. Introduction
2. Literature Review
- The establishment of a multi-stage heuristic algorithm to solve single-objective vehicle routing problems;
- The proposal of multi-objective decision-making method with relaxation coefficient to solve bi-objective or multi-objective vehicle routing problems;
- The design of a time-dependent arc duration calculation method and applying it to the optimization algorithms and simulation method;
- The development of a simulation method and dynamic route updating strategy.
3. Problem Description
3.1. Formal Description
3.2. Time-Dependent Arc Durations
- (a)
- If and in the same time slot, the time-dependent velocity on the arc is equivalent, and the time-dependent arc duration is the ratio of the distance Lij to the time-dependent velocity .
- (b)
- If and within two adjacent time slots, the travel duration spans two time slots. The calculation method of time-dependent arc durations is illustrated in Figure 1a.
- (c)
- If and in two non-adjacent time slots, the travel duration on arc (i, j) is composed of three parts, as illustrated in Figure 1b. The first part is equal to the start time of time slot subtracting the start time of the node i. The second part contains a number of complete time slots. The third part is equal to the arrival time of the node j minusing the start time of the time slot . As can be seen from Figure 1b, arc length Lij is divided into n + 1 segments, and the arrival time at node j from i is: .
4. Problem Formulation
4.1. Model 1
4.2. Model 2
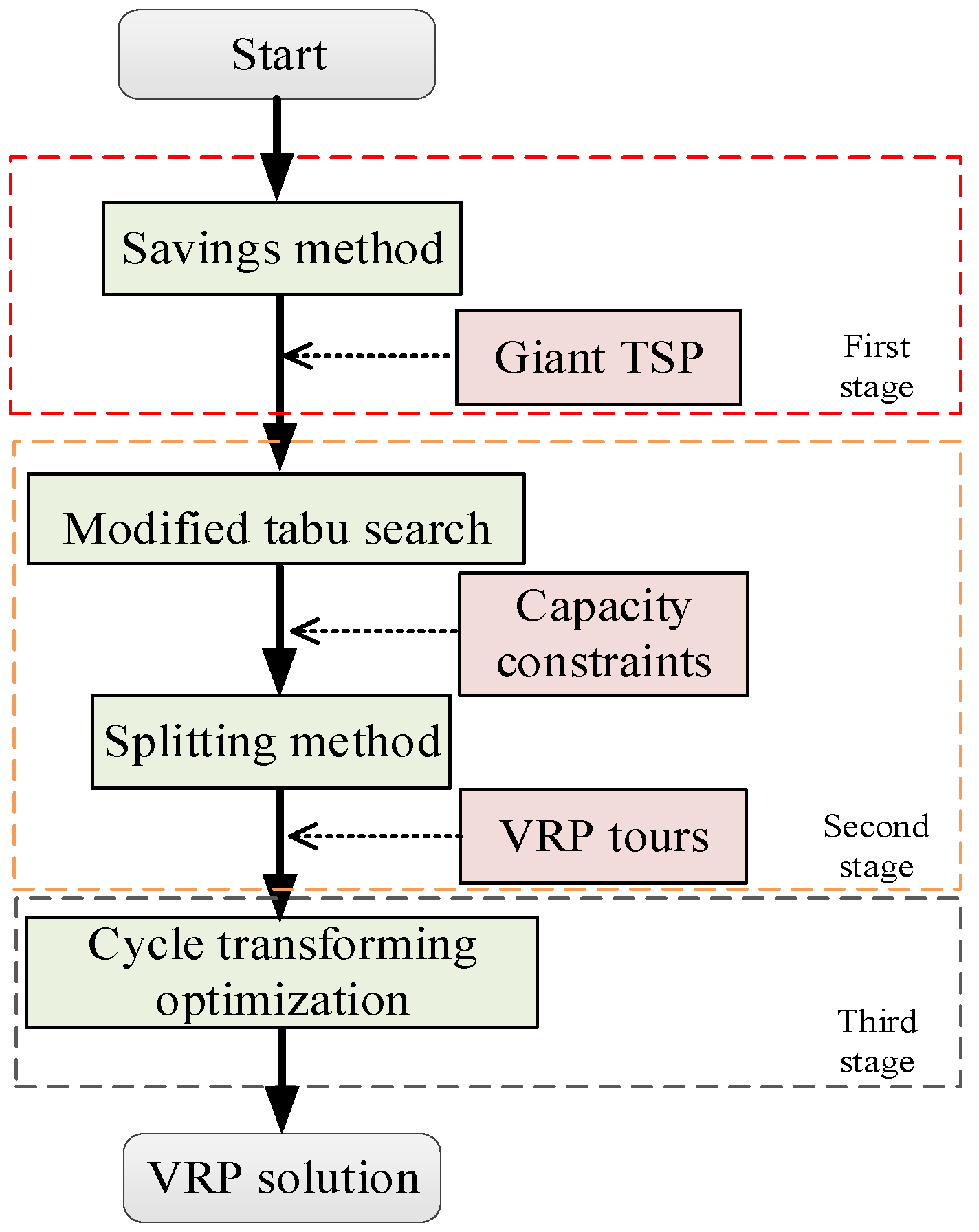
5. Solution Algorithm
5.1. First Stage: Savings Method
5.2. Second Stage: Modified Tabu Search Algorithm
| Algorithm 1: Pseudo-code for the modified tabu search |
| 1: Input X: a result of the CW 2: Preprocessing 3: Set the parameters e.g.history optimal solution (best), current solution (current) 4: Initialize counter: iteration, stop 5:While iteration < MAXiter and stop < MAXstop 6: For i = 0 to M 7: Randomly select a move operator and generate a new solution X* 8: Add X* to candidate list TL 9: End For 10: Sort the candidate list by fitness 11: If TL (1) < best Then 12: stop = 0 13: Update parameters 14: If Tabu list not full Then 15: Add best to Tabu list 16: Else: 17: Pop the first item of Tabu list 18: Add best to the rear of Tabu list 19: End If 20: Else: 21: stop = stop + 1 22: search current from the Tabu list 23: update the Tabu list 24: End If 25: iteration = iteration + 1 26: End While 27: Output Current solution |
- (a)
- Inverse neighborhood search operator: that is, randomly selecting a segment of route and reverse its order;
- (b)
- 1-opt insert search operator: randomly selecting a node inserted into another location in the route;
- (c)
- 2-opt* exchange search operator: randomly selecting two nodes to swap;
- (d)
- 3-opt exchange search operator: randomly selecting three nodes to reassign its location.
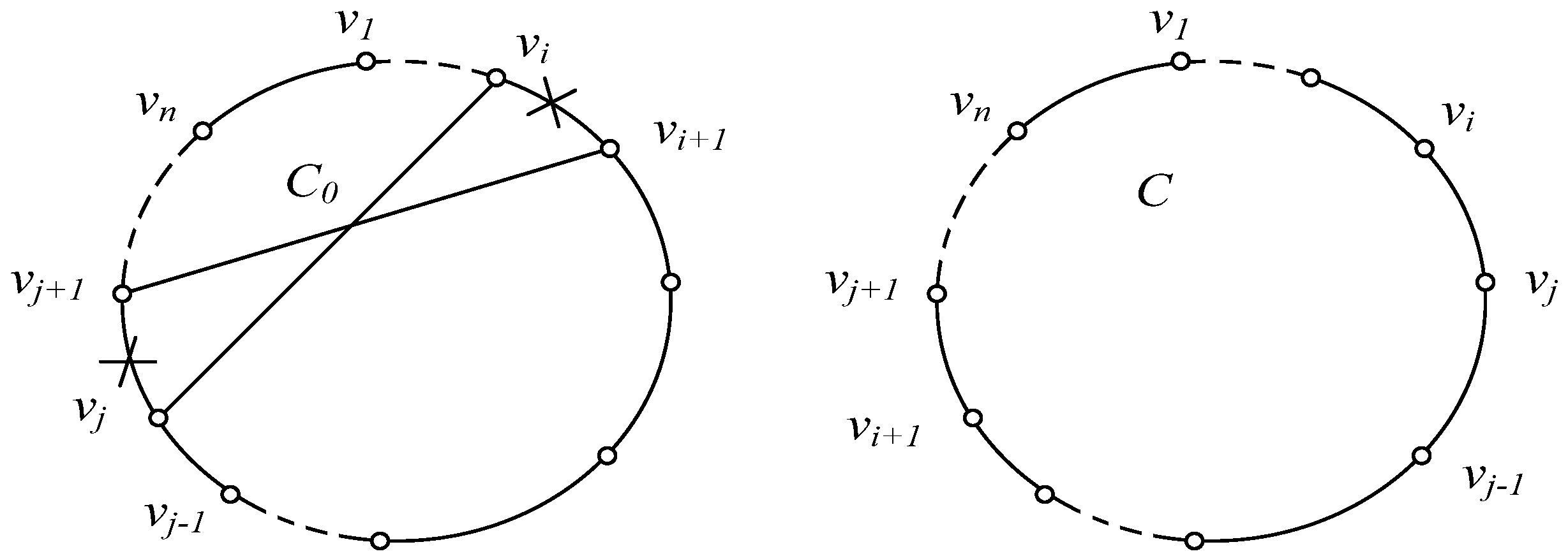
5.3. Third Stage: Cycle Transforming Optimization Algorithm
| Algorithm 2: Pseudo-code for intensification stage |
| 1: Input C0: initial TSP tour and : weight matrix 2:C = C0 3: For i = 1 to N − 1 4: For j = i + 1 to N − 1 5: If 6: Del. arc and from C 7: Add arc and to C 8: Rebuild tour C 9: End If 10: End For 11: End For 12: Output C |
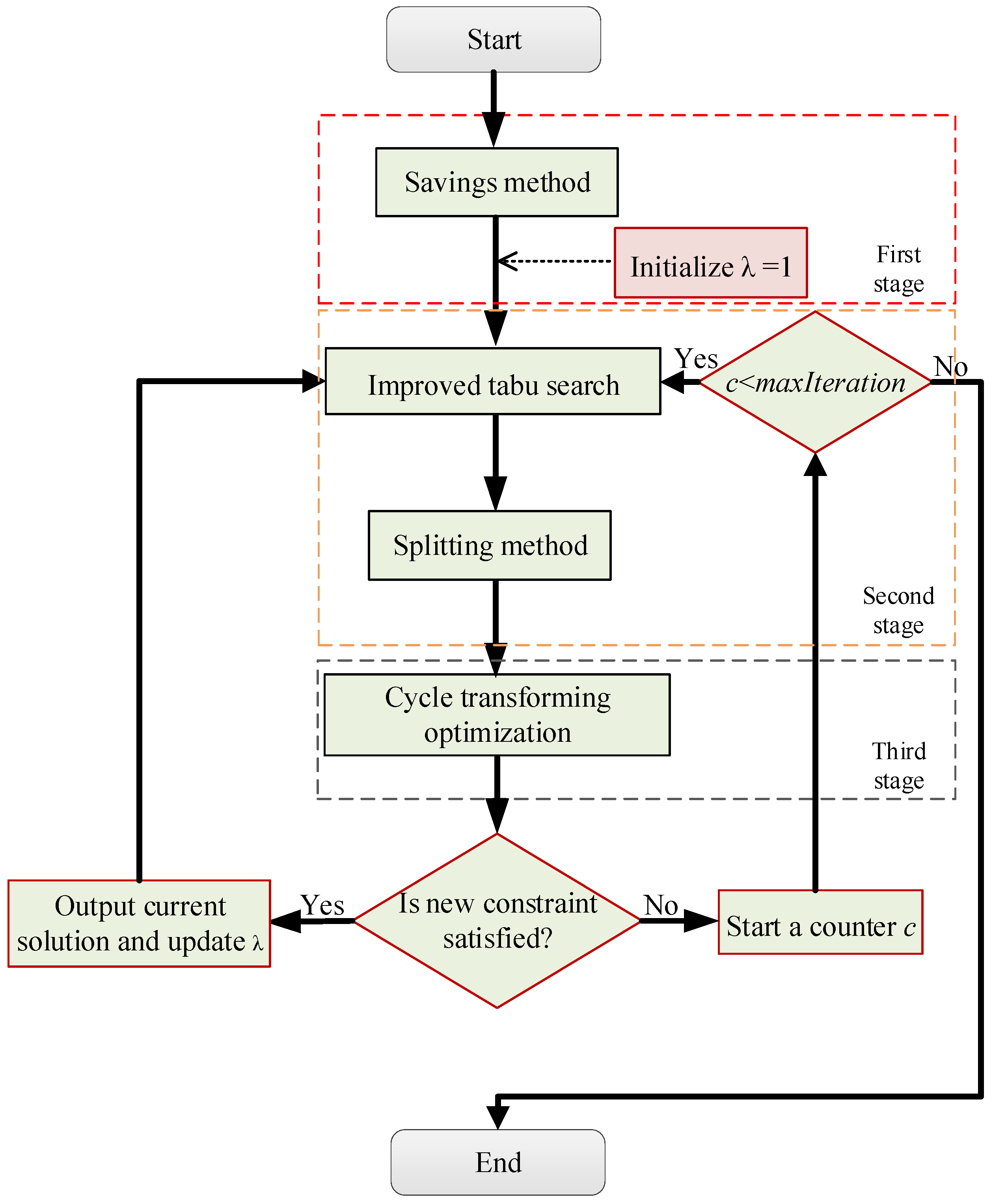
5.4. Solution Framework for Bi-Objective Models
6. Performance Test Based on Model 1
6.1. Testing on Benchmark Instances
6.2. Testing on Large-Scale Instances
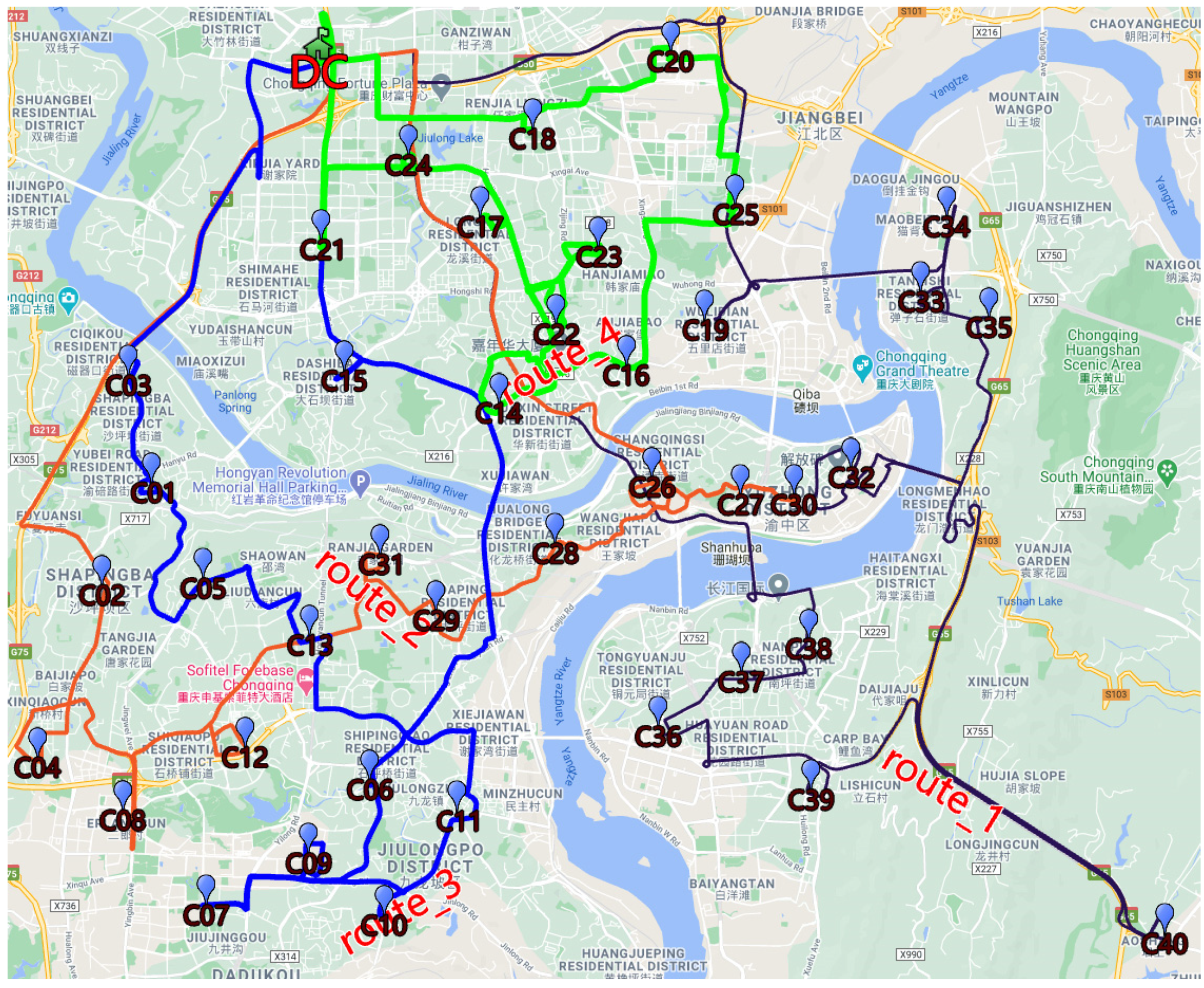
7. Case Study
7.1. Appling the Algorithm Based on Model 1
7.2. Dynamic Route Updating Strategy
7.3. Comparisons of Distance and Cost under Different Distance Calculation Methods
7.4. The Case Study Considering Both the Objective z1 and z2
7.5. Managerial Insights
8. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations and acronyms | |
| CTO | cycle transforming optimization |
| GDP | gross domestic product |
| CVRP | capacitated vehicle routing problem |
| VRP | vehicle routing problem |
| TDVRP | time-dependent vehicle routing problems |
| BC | branch-and-cut |
| BP | branch-and-price |
| BCP | branch-cut-and-price |
| PSO | particle swarm optimization |
| CVRPTW | capacitated vehicle routing problem with time windows |
| CO2 | carbon dioxide |
| GRASP | greedy randomized adaptive search procedure |
| NSGA | non-dominated sorting genetic algorithm |
| ALNS | adaptive large neighborhood search |
| FIFO | first in first out |
| API | application program interface |
| TPI | traffic performance index |
| COPERT | computer program to calculate emissions from road transport |
| TSP | traveling salesman problem |
| CW | Clarke and Wright’s savings heuristic algorithm |
| MDP | multi-objective decision problem |
| TS | tabu search |
| KBR | known best results |
| CNY | Chinese yuan |
| ETA | estimated time of arrival |
| Sets and parameters: | |
| {0} | the set of depots |
| the set of customers | |
| the set of nodes | |
| S | any subset of set C |
| the set of arcs | |
| Q | the capacity of vehicles |
| Vc | the variable cost |
| Fc | the fixed cost |
| L | the maximum travel distance of vehicles |
| the set of vehicles | |
| the demand of customer | |
| the travel distance on arc(i,j) | |
| the time-dependent travel duration on arc(i,j) | |
| the emission factor of fuel | |
| Decision variables | |
| equals 1 if the arc(i,j) is traversed by vehicle k; 0 otherwise | |
| equals 1 if customer i is served by the vehicle k; 0 otherwise | |
References
- Hannan, M.A.; Begum, R.; Al-Shetwi, A.Q.; Ker, P.; Al Mamun, M.; Hussain, A.; Basri, H.; Mahlia, T. Waste collection route optimisation model for linking cost saving and emission reduction to achieve sustainable development goals. Sustain. Cities Soc. 2020, 62, 102393. [Google Scholar] [CrossRef]
- Letchford, A.N.; Lysgaard, J.; Eglese, R.W. A branch-and-cut algorithm for the capacitated open vehicle routing problem. J. Oper. Res. Soc. 2007, 58, 1642–1651. [Google Scholar] [CrossRef]
- Christiansen, C.H.; Lysgaard, J. A branch-and-price algorithm for the capacitated vehicle routing problem with stochastic demands. Oper. Res. Lett. 2007, 35, 773–781. [Google Scholar] [CrossRef]
- Xie, Y.; Lu, W.; Wang, W.; Quadrifoglio, L. A multimodal location and routing model for hazardous materials transportation. J. Hazard. Mater. 2012, 227–228, 135–141. [Google Scholar] [CrossRef]
- Gauvin, C.; Desaulniers, G.; Gendreau, M. A branch-cut-and-price algorithm for the vehicle routing problem with stochastic demands. Comput. Oper. Res. 2014, 50, 141–153. [Google Scholar] [CrossRef]
- Santos, F.A.; Mateus, G.R.; da Cunha, A.S. A Branch-and-Cut-and-Price Algorithm for the Two-Echelon Capacitated Vehicle Routing Problem. Transp. Sci. 2015, 49, 355–368. [Google Scholar] [CrossRef]
- Dinh, T.; Fukasawa, R.; Luedtke, J. Exact algorithms for the chance-constrained vehicle routing problem. Math. Program. 2017, 172, 105–138. [Google Scholar] [CrossRef]
- Munari, P.; Moreno, A.; De La Vega, J.; Alem, D.; Gondzio, J.; Morabito, R. The Robust Vehicle Routing Problem with Time Windows: Compact Formulation and Branch-Price-and-Cut Method. Transp. Sci. 2019, 53, 1043–1066. [Google Scholar] [CrossRef]
- Florio, A.M.; Hartl, R.F.; Minner, S. New Exact Algorithm for the Vehicle Routing Problem with Stochastic Demands. Transp. Sci. 2020, 54, 1073–1090. [Google Scholar] [CrossRef]
- Xiao, Y.; Zuo, X.; Huang, J.; Konak, A.; Xu, Y. The continuous pollution routing problem. Appl. Math. Comput. 2020, 387, 125072. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Z.; Yu, L.; Fang, K.; Yao, B.; Yu, B. Routing optimization of shared autonomous electric vehicles under uncertain travel time and uncertain service time. Transp. Res. Part E Logist. Transp. Rev. 2021, 157, 102548. [Google Scholar] [CrossRef]
- Clarke, G.; Wright, J.W. Scheduling of Vehicles from a Central Depot to a Number of Delivery Points. Oper. Res. 1964, 12, 568–581. [Google Scholar] [CrossRef]
- Zidi, I.; Al-Omani, M.; Aldhafeeri, K. A New Approach Based on the Hybridization of Simulated Annealing Algorithm and Tabu Search to Solve the Static Ambulance Routing Problem. Procedia Comput. Sci. 2019, 159, 1216–1228. [Google Scholar] [CrossRef]
- Omidvar, A.; Ozguven, E.E.; Vanli, O.A.; Tavakkoli-Moghaddam, R. A two-phase safe vehicle routing and scheduling problem: Formulations and solution algorithms. Arxiv Prepr. 2017, arXiv:07147. [Google Scholar]
- Marinakis, Y.; Marinaki, M.; Dounias, G. A hybrid particle swarm optimization algorithm for the vehicle routing problem. Eng. Appl. Artif. Intell. 2010, 23, 463–472. [Google Scholar] [CrossRef]
- Rong, L.; Xu, M. Impact of Altruistic Preference and Government Subsidy on the Multinational Green Supply Chain under Dynamic Tariff. Environ. Dev. Sustain. 2021, 24, 1928–1958. [Google Scholar] [CrossRef]
- Akeb, H.; Bouchakhchoukha, A.; Hifi, M. A Three-Stage Heuristic for the Capacitated Vehicle Routing Problem with Time Windows, in Recent Advances in Computational Optimization: Results of the Workshop on Computational Optimization WCO 2013; Fidanova, S., Ed.; Springer International Publishing: Cham, Cambodia, 2015; pp. 1–19. [Google Scholar]
- Ichoua, S.; Gendreau, M.; Potvin, J.-Y. Vehicle dispatching with time-dependent travel times. Eur. J. Oper. Res. 2003, 144, 379–396. [Google Scholar] [CrossRef]
- Lecluyse, C.; Van Woensel, T.; Peremans, H. Vehicle routing with stochastic time-dependent travel times. 4OR A Q. J. Oper. Res. 2009, 7, 363–377. [Google Scholar] [CrossRef]
- Jabali, O.; Van Woensel, T.; de Kok, A.G. Analysis of Travel Times and CO2Emissions in Time-Dependent Vehicle Routing. Prod. Oper. Manag. 2012, 21, 1060–1074. [Google Scholar] [CrossRef]
- Qian, J.; Eglese, R. Fuel emissions optimization in vehicle routing problems with time-varying speeds. Eur. J. Oper. Res. 2016, 248, 840–848. [Google Scholar] [CrossRef]
- Çimen, M.; Soysal, M. Time-dependent green vehicle routing problem with stochastic vehicle speeds: An approximate dynamic programming algorithm. Transp. Res. Part D Transp. Environ. 2017, 54, 82–98. [Google Scholar] [CrossRef]
- Wang, Y.; Assogba, K.; Fan, J.; Xu, M.; Liu, Y.; Wang, H. Multi-depot green vehicle routing problem with shared transportation resource: Integration of time-dependent speed and piecewise penalty cost. J. Clean. Prod. 2019, 232, 12–29. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, L.; Van Woensel, T.; Gross, J.-P. Time-dependent vehicle routing problem with path flexibility. Transp. Res. Part B Methodol. 2017, 95, 169–195. [Google Scholar] [CrossRef]
- Ma, Z.-J.; Wu, Y.; Dai, Y. A combined order selection and time-dependent vehicle routing problem with time widows for perishable product delivery. Comput. Ind. Eng. 2017, 114, 101–113. [Google Scholar] [CrossRef]
- Fan, H.; Zhang, Y.; Tian, P.; Lv, Y.; Fan, H. Time-dependent multi-depot green vehicle routing problem with time windows considering temporal-spatial distance. Comput. Oper. Res. 2021, 129, 105211. [Google Scholar] [CrossRef]
- Allahyari, S.; Yaghoubi, S.; Van Woensel, T. The secure time-dependent vehicle routing problem with uncertain demands. Comput. Oper. Res. 2021, 131, 105253. [Google Scholar] [CrossRef]
- Schmidt, C.E.; Silva, A.C.; Darvish, M.; Coelho, L.C. Time-dependent fleet size and mix multi-depot vehicle routing problem. Int. J. Prod. Econ. 2023, 255, 108653. [Google Scholar] [CrossRef]
- Costa, L.; Lust, T.; Kramer, R.; Subramanian, A. A two-phase Pareto local search heuristic for the bi-objective pollution-routing problem. Networks 2018, 72, 311–336. [Google Scholar] [CrossRef]
- Poonthalir, G.; Nadarajan, R. A Fuel Efficient Green Vehicle Routing Problem with varying speed constraint (F-GVRP). Expert Syst. Appl. 2018, 100, 131–144. [Google Scholar] [CrossRef]
- Zhao, P.; Luo, W.; Han, X. Time-dependent and bi-objective vehicle routing problem with time windows. Adv. Prod. Eng. Manag. 2019, 14, 201–212. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, M.; Wu, S. Multi-Objective Vehicle Routing Problem for Waste Classification and Collection with Sustainable Concerns: The Case of Shanghai City. Sustainability 2022, 14, 11498. [Google Scholar] [CrossRef]
- Ghannadpour, S.F.; Zarrabi, A. Multi-objective heterogeneous vehicle routing and scheduling problem with energy minimizing. Swarm Evol. Comput. 2018, 44, 728–747. [Google Scholar] [CrossRef]
- Ren, X.; Huang, H.; Feng, S.; Liang, G. An improved variable neighborhood search for bi-objective mixed-energy fleet vehicle routing problem. J. Clean. Prod. 2020, 275, 124155. [Google Scholar] [CrossRef]
- Islam, A.; Gajpal, Y.; ElMekkawy, T.Y. Mixed fleet based green clustered logistics problem under carbon emission cap. Sustain. Cities Soc. 2021, 72, 103074. [Google Scholar] [CrossRef]
- Amiri, A.; Amin, S.H.; Zolfagharinia, H. A bi-objective green vehicle routing problem with a mixed fleet of conventional and electric trucks: Considering charging power and density of stations. Expert Syst. Appl. 2023, 213, 119228. [Google Scholar] [CrossRef]
- Glize, E.; Jozefowiez, N.; Ngueveu, S.U. An ε-constraint column generation-and-enumeration algorithm for Bi-Objective Vehicle Routing Problems. Comput. Oper. Res. 2022, 138, 105570. [Google Scholar] [CrossRef]
- Zarouk, Y.; Mahdavi, I.; Rezaeian, J.; Santos-Arteaga, F.J. A novel multi-objective green vehicle routing and scheduling model with stochastic demand, supply, and variable travel times. Comput. Oper. Res. 2022, 141, 105698. [Google Scholar] [CrossRef]
- EMISIA. Methodology for the Calculation of Emissions–COPERTE V. 2022. Available online: https://www.emisia.com/utilities/copert/documentation/ (accessed on 3 November 2022).
- Ntziachristos, L.; Samaras, Z. Copert III Methodology and Emission Factors (Version 2.1); Eggleston, S., Gorissen, N., Hassel, D., Hickman, A.-J., Joumard, R., Rijkeboer, R., White, L., Zierock, K.-H., Eds.; European Environment Agency, ETC/AE: Copenhagen, Denmark, 2000; Available online: https://vergina.eng.auth.gr/mech/lat/copert/C3v2_1MR.pdf (accessed on 1 May 2022).
- Gendreau, M. An Introduction to Tabu Search. In Handbook of Metaheuristics; Glover, F., Kochenberger, G.A., Eds.; Springer US: Boston, MA, USA, 2003; pp. 37–54. [Google Scholar]
- Jin, Y.; Ge, X.; Zhang, L.; Ren, J. A two-stage algorithm for bi-objective logistics model of cash-in-transit vehicle routing problems with economic and environmental optimization based on real-time traffic data. J. Ind. Inf. Integr. 2021, 26, 100273. [Google Scholar] [CrossRef]
- Bondy, J.A.; Murty, U.S.R. Graph Theory, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2007; p. 650. [Google Scholar]
- Augerat, P.; Naddef, D.; Belenguer, J.M.; Benavent, E.; Corberan, A.; Rinaldi, G. The VRP Web. 2022. Available online: http://www.bernabe.dorronsoro.es/vrp/index.html (accessed on 3 March 2022).
- Jingdong (JD). The Global Optimization Challenge. 2018. Available online: https://medium.com/jd-technology-blog (accessed on 3 March 2022).
- Nichat, M.K.; Chopde, R.N.; Nichat, M. Landmark Based Shortest Path Detection By Using A* Algorithm and Haversine Formula. Int. J. Innov. Res. Comput. Commun. Eng. 2013, 1, 299. [Google Scholar]
- Ge, X.; Jin, Y.; Zhang, L. Genetic-based algorithms for cash-in-transit multi depot vehicle routing problems: Economic and environmental optimization. Environ. Dev. Sustain. 2022, 25, 557–586. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Description | Values |
|---|---|---|---|
| Vehicle | Vc | Variable cost | 2 CNY·km−1 |
| Fc | Fixed cost | 300 CNY per vehicle | |
| Q | Maximum load | 2.5 metric tons | |
| TS | Lentl | The length of tabu list | 20 |
| MAXstop | The maximum number of times that the objective without improvement | 50 | |
| MAXiter | Maximum iterations | 300 |
| Instance | KBR | Optimal | Gap | CPU Time (s) |
|---|---|---|---|---|
| A-n32-k5 | 784 | 808 | 3.06% | 1.48 |
| A-n33-k5 | 661 | 693 | 4.84% | 1.83 |
| A-n33-k6 | 742 | 799 | 7.68% | 1.78 |
| A-n34-k5 | 778 | 794 | 2.06% | 1.78 |
| A-n36-k5 | 799 | 829 | 3.75% | 1.77 |
| A-n37-k5 | 669 | 701 | 4.78% | 1.59 |
| A-n37-k6 | 949 | 990 | 4.32% | 1.83 |
| A-n38-k5 | 730 | 774 | 6.03% | 1.77 |
| A-n39-k6 | 831 | 876 | 5.42% | 1.86 |
| A-n45-k7 | 1146 | 1181 | 3.05% | 1.83 |
| A-n48-k7 | 1073 | 1119 | 4.29% | 2.58 |
| A-n53-k7 | 1010 | 1110 | 9.90% | 1.83 |
| A-n54-k7 | 1167 | 1249 | 7.03% | 1.94 |
| A-n55-k9 | 1073 | 1137 | 5.96% | 1.86 |
| Average | 5.16% | 1.84 |
| Instance | KBR | Optimal | Gap | CPU Time (s) |
|---|---|---|---|---|
| B-n31-k5 | 672 | 692 | 2.98% | 1.80 |
| B-n34-k5 | 788 | 879 | 11.55% | 1.78 |
| B-n35-k5 | 955 | 976 | 2.20% | 1.77 |
| B-n38-k6 | 805 | 832 | 3.35% | 2.14 |
| B-n39-k5 | 549 | 607 | 10.56% | 1.78 |
| B-n43-k6 | 742 | 751 | 1.21% | 1.63 |
| B-n45-k5 | 751 | 782 | 4.13% | 1.72 |
| B-n45-k6 | 678 | 703 | 3.69% | 1.88 |
| B-n50-k7 | 741 | 792 | 6.88% | 1.89 |
| B-n52-k7 | 747 | 767 | 2.68% | 1.91 |
| B-n56-k7 | 707 | 768 | 8.63% | 1.92 |
| B-n57-k9 | 1598 | 1661 | 3.94% | 2.22 |
| B-n63-k10 | 1496 | 1588 | 6.15% | 1.88 |
| B-n67-k10 | 1032 | 1104 | 6.98% | 2.39 |
| Average | 5.35% | 1.91 |
| Instance | Vehicles | Distance (km) | Cost (CNY) |
|---|---|---|---|
| JD100 | 3 | 457.56 | 1815.12 |
| JD200 | 8 | 823.6 | 4047.2 |
| JD500 | 58 | 3826.63 | 25,053.26 |
| JD1000 | 105 | 7195.42 | 45,890.84 |
| JD1300 | 141 | 8569.18 | 59,438.36 |
| JD1500 | 173 | 10,468.71 | 72,837.42 |
| Instance | CW (s) | TS (s) | CTO (s) | Total (s) |
|---|---|---|---|---|
| JD100 | 0.25 | 2.0781 | 0.0156 | 2.3 |
| JD200 | 0.8438 | 2.4375 | 0.0313 | 3.3 |
| JD500 | 2.9531 | 2.0313 | 0.0156 | 5 |
| JD1000 | 21.9688 | 3.4844 | 0.0156 | 25.5 |
| JD1300 | 57.4375 | 5.1563 | 0.0938 | 62.7 |
| JD1500 | 85.3906 | 6.5781 | 0.0938 | 92.1 |
| Tour Plan | Revised Tour Plan | |||
|---|---|---|---|---|
| Distance (km) | Cost (CNY) | Distance (km) | Cost (CNY) | |
| route_1 | 77.64 | 455.28 | 75.75 | 451.5 |
| route_2 | 74.56 | 449.11 | 53.6 | 407.2 |
| route_3 | 60.06 | 420.12 | 53.88 | 407.77 |
| route_4 | 48.12 | 396.23 | 40.68 | 381.36 |
| 260.38 | 1720.75 | 223.91 | 1647.83 | |
| Departure Time | ETA (min.) | Distance (km) | Emission (kg) |
|---|---|---|---|
| 6:30 | 484.60 | 229.48 | 81.27 |
| 7:30 | 715.60 | 244.99 | 110.92 |
| 8:30 | 790.30 | 232.05 | 117.91 |
| 9:30 | 660.10 | 230.75 | 103.01 |
| 10:30 | 601.70 | 237.50 | 96.64 |
| 11:30 | 547.50 | 232.83 | 89.40 |
| 12:30 | 510.50 | 231.32 | 84.70 |
| 13:30 | 566.30 | 235.14 | 92.10 |
| 14:30 | 619.90 | 237.20 | 98.91 |
| 15:30 | 606.20 | 229.21 | 96.50 |
| 16:30 | 661.50 | 237.35 | 103.89 |
| 17:30 | 922.50 | 232.71 | 133.01 |
| 18:30 | 873.00 | 235.20 | 127.77 |
| Average | 658.44 | 234.29 | 102.77 |
| Speed Range (km·h−1) | Fuel Consumption Factor (g·km−1) | r2 |
|---|---|---|
| 0–47 | 0.99 | |
| 47–100 | 0.798 |
| Run No. | Real Distance | Haversine Distance | ||
|---|---|---|---|---|
| Distance (km) | Cost (CNY) | Distance (km) | Cost (CNY) | |
| 1 | 238.73 | 1677.46 | 141.12 | 1482.24 |
| 2 | 248.49 | 1696.98 | 135.74 | 1471.48 |
| 3 | 230.16 | 1660.32 | 138.69 | 1477.38 |
| 4 | 227.69 | 1655.38 | 138.91 | 1477.82 |
| 5 | 242.71 | 1685.42 | 137.69 | 1475.38 |
| 6 | 239.23 | 1678.46 | 142.57 | 1485.14 |
| 7 | 237.36 | 1674.72 | 141.33 | 1482.66 |
| 8 | 235.81 | 1671.62 | 136.88 | 1473.76 |
| 9 | 248.65 | 1697.3 | 138.69 | 1477.38 |
| 10 | 244.22 | 1688.44 | 144.2 | 1488.4 |
| Average | 238.76 | 1677.52 | 139.07 | 1478.14 |
| Radio | 1.72 | 1.13 | ||
| Instance | Haversine Distance (km) | Real Distance (km) | R/H |
|---|---|---|---|
| JD100 | 457.56 | 738.37 | 1.61 |
| JD200 | 823.60 | 1336.33 | 1.62 |
| JD500 | 3826.63 | 5912.22 | 1.55 |
| JD1000 | 7195.42 | 11,404.81 | 1.59 |
| JD1300 | 8569.18 | 13,279.15 | 1.55 |
| JD1500 | 10,468.71 | 15,997.52 | 1.53 |
| Average | 1.57 |
| Run NO. | Distance (km) | Emission (kg) | Cost (CNY) | ETA (min.) |
|---|---|---|---|---|
| 1 | 257.68 | 94.87 | 1715.35 | 552.19 |
| 2 | 231.75 | 92.77 | 1663.49 | 558.83 |
| 3 | 237.66 | 91.51 | 1675.32 | 541.04 |
| 4 | 235.19 | 89.74 | 1670.37 | 530.39 |
| 5 | 244.23 | 94.14 | 1688.46 | 556.82 |
| 6 | 240.69 | 93.86 | 1681.38 | 562.03 |
| 7 | 243.30 | 94.49 | 1686.60 | 563.60 |
| 8 | 236.13 | 90.03 | 1672.27 | 533.30 |
| 9 | 252.40 | 96.97 | 1704.80 | 571.44 |
| 10 | 256.62 | 95.84 | 1713.24 | 563.49 |
| Average | 243.56 | 93.42 | 1687.13 | 553.31 |
| Distance (km) | Emission (kg) | Cost (CNY) | ETA (min.) | |
|---|---|---|---|---|
| A satisfied solution | 233.77 | 91.63 | 1667.53 | 543.80 |
| The best solution with minimizing z2 | 235.19 | 89.74 | 1670.37 | 530.39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, X.; Jin, Y. Sustainability Oriented Vehicle Route Planning Based on Time-Dependent Arc Travel Durations. Sustainability 2023, 15, 3208. https://doi.org/10.3390/su15043208
Ge X, Jin Y. Sustainability Oriented Vehicle Route Planning Based on Time-Dependent Arc Travel Durations. Sustainability. 2023; 15(4):3208. https://doi.org/10.3390/su15043208
Chicago/Turabian StyleGe, Xianlong, and Yuanzhi Jin. 2023. "Sustainability Oriented Vehicle Route Planning Based on Time-Dependent Arc Travel Durations" Sustainability 15, no. 4: 3208. https://doi.org/10.3390/su15043208
APA StyleGe, X., & Jin, Y. (2023). Sustainability Oriented Vehicle Route Planning Based on Time-Dependent Arc Travel Durations. Sustainability, 15(4), 3208. https://doi.org/10.3390/su15043208