
An Effective Transformerless PUC7-Based Dynamic Voltage Restorer Using Model Predictive Control





Abstract
:1. Introduction
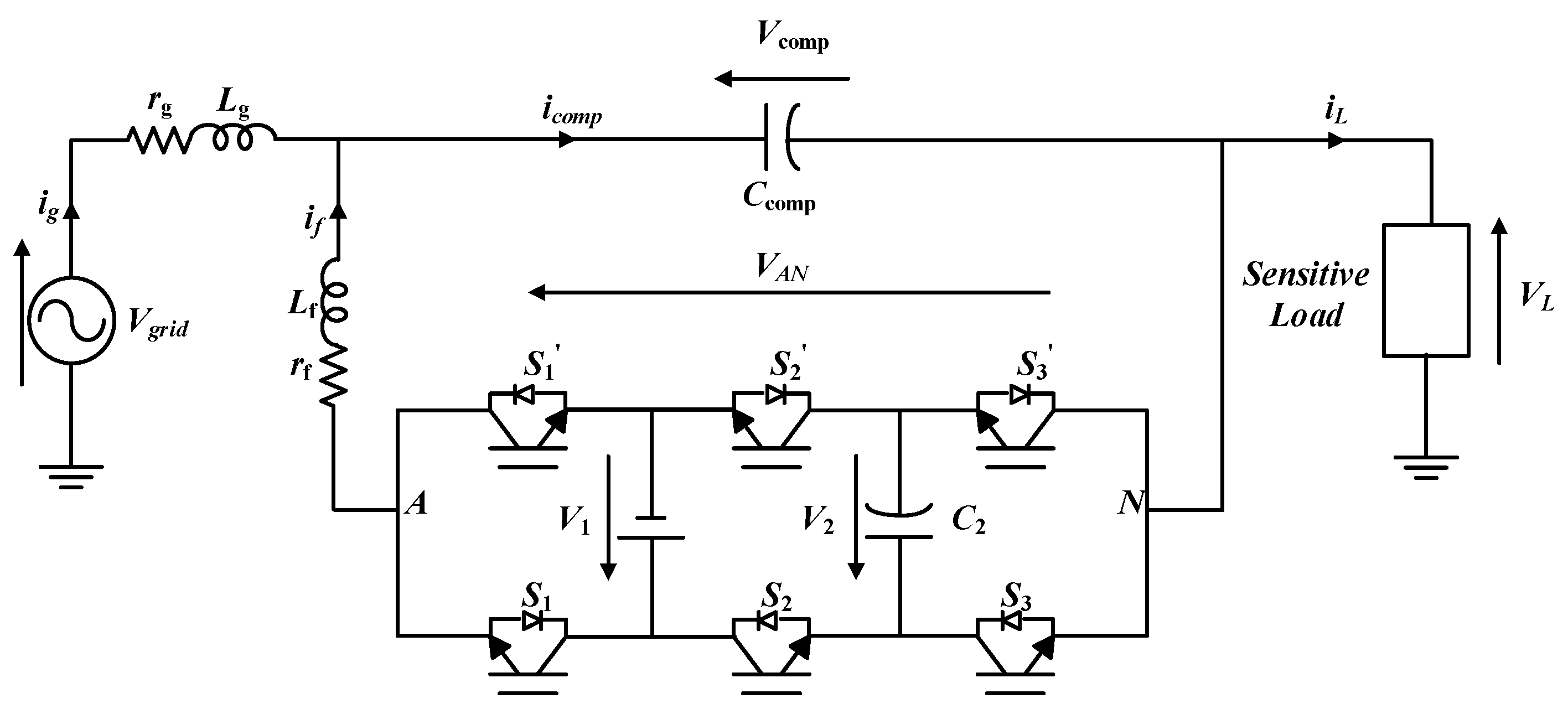
2. PUC-Based DVR Topology and Modeling
2.1. Topology
2.2. Modeling
3. MPC Design
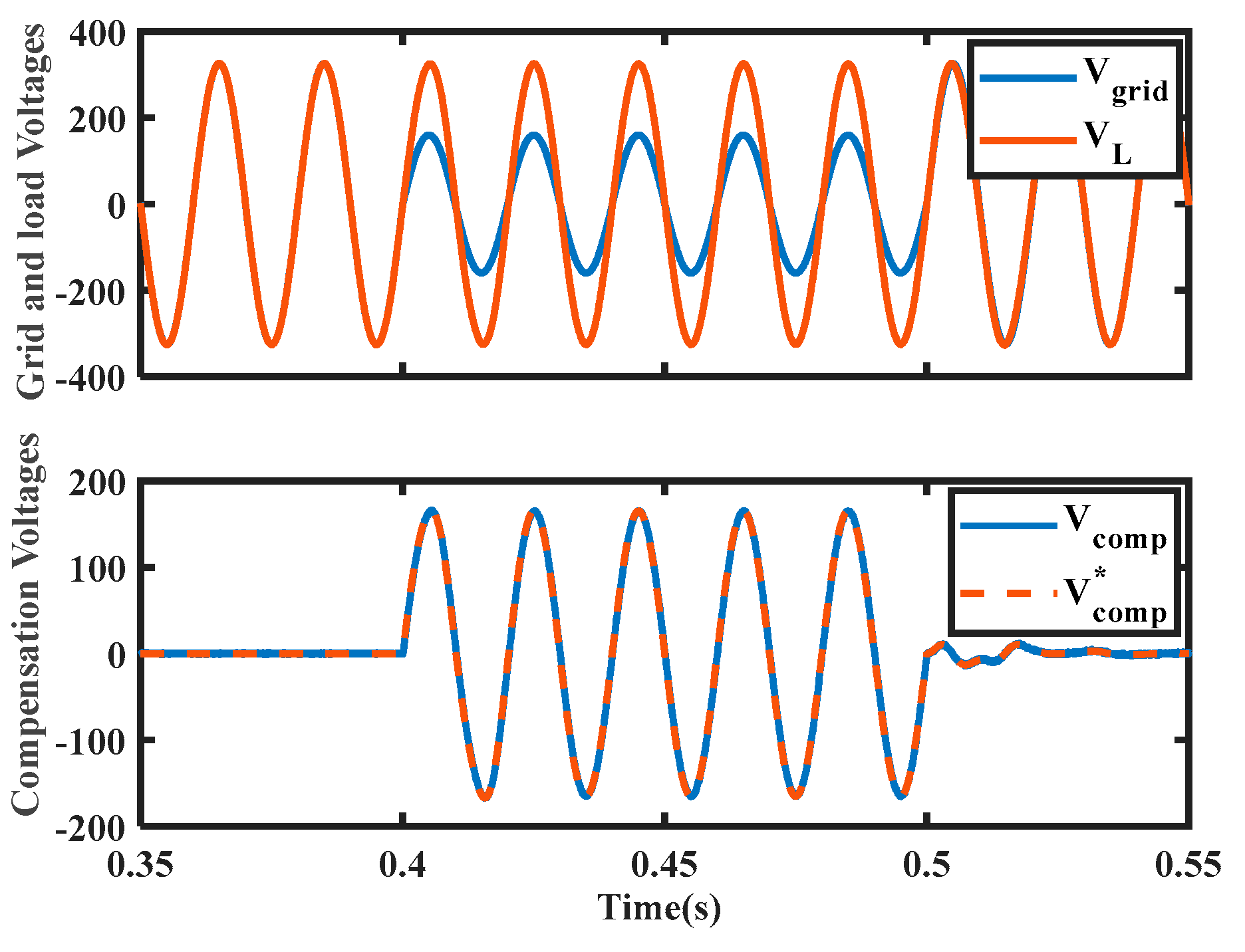
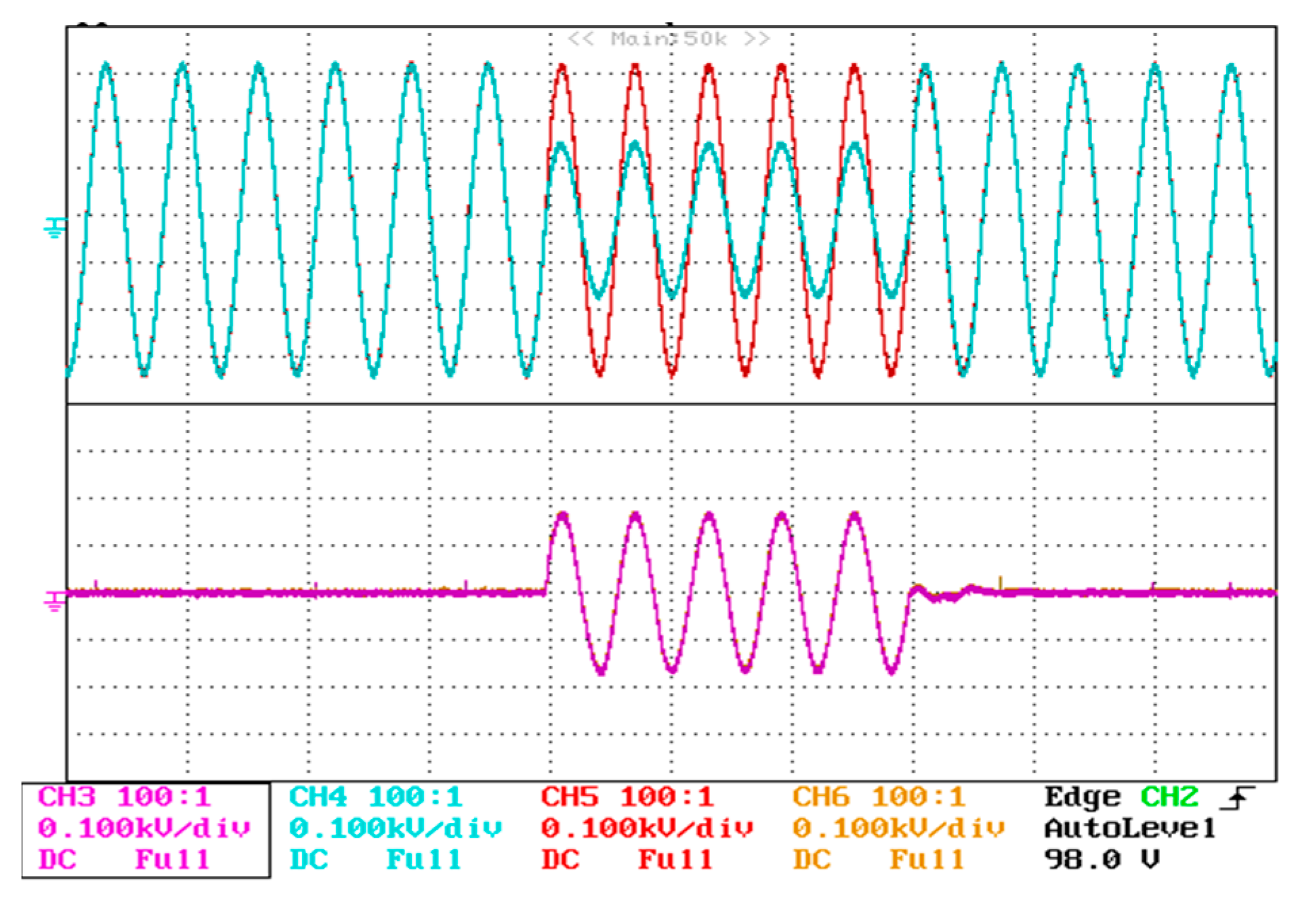
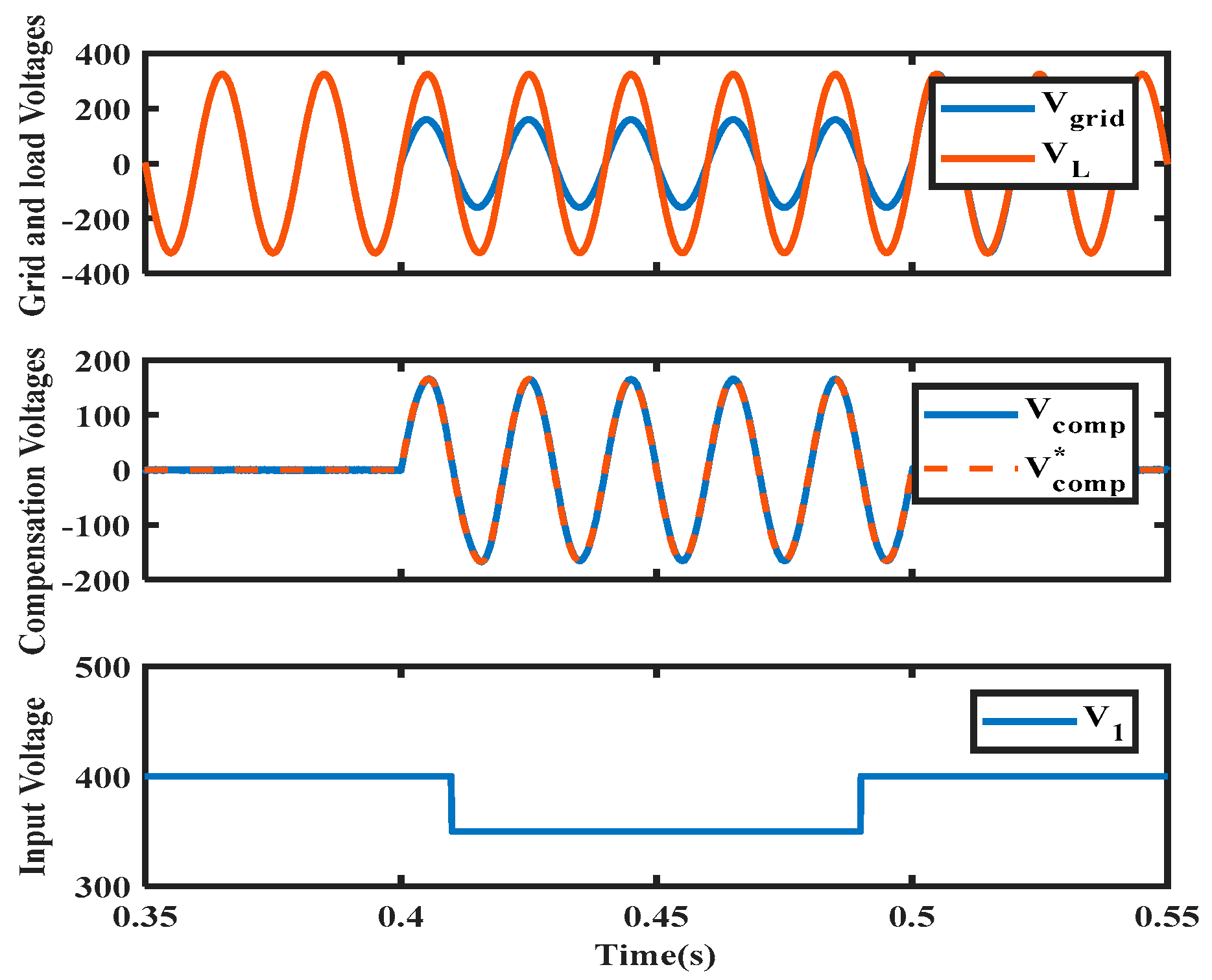
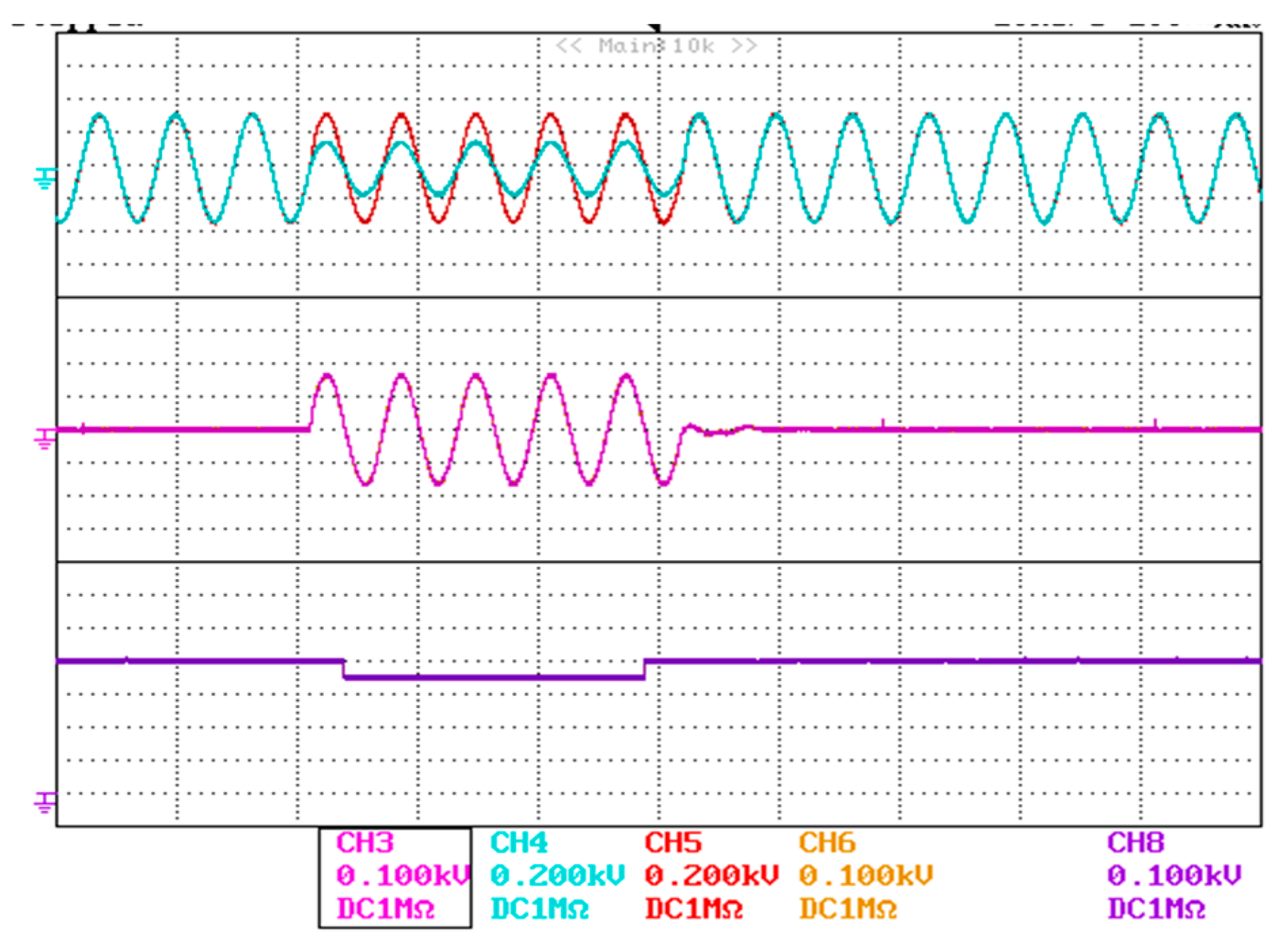
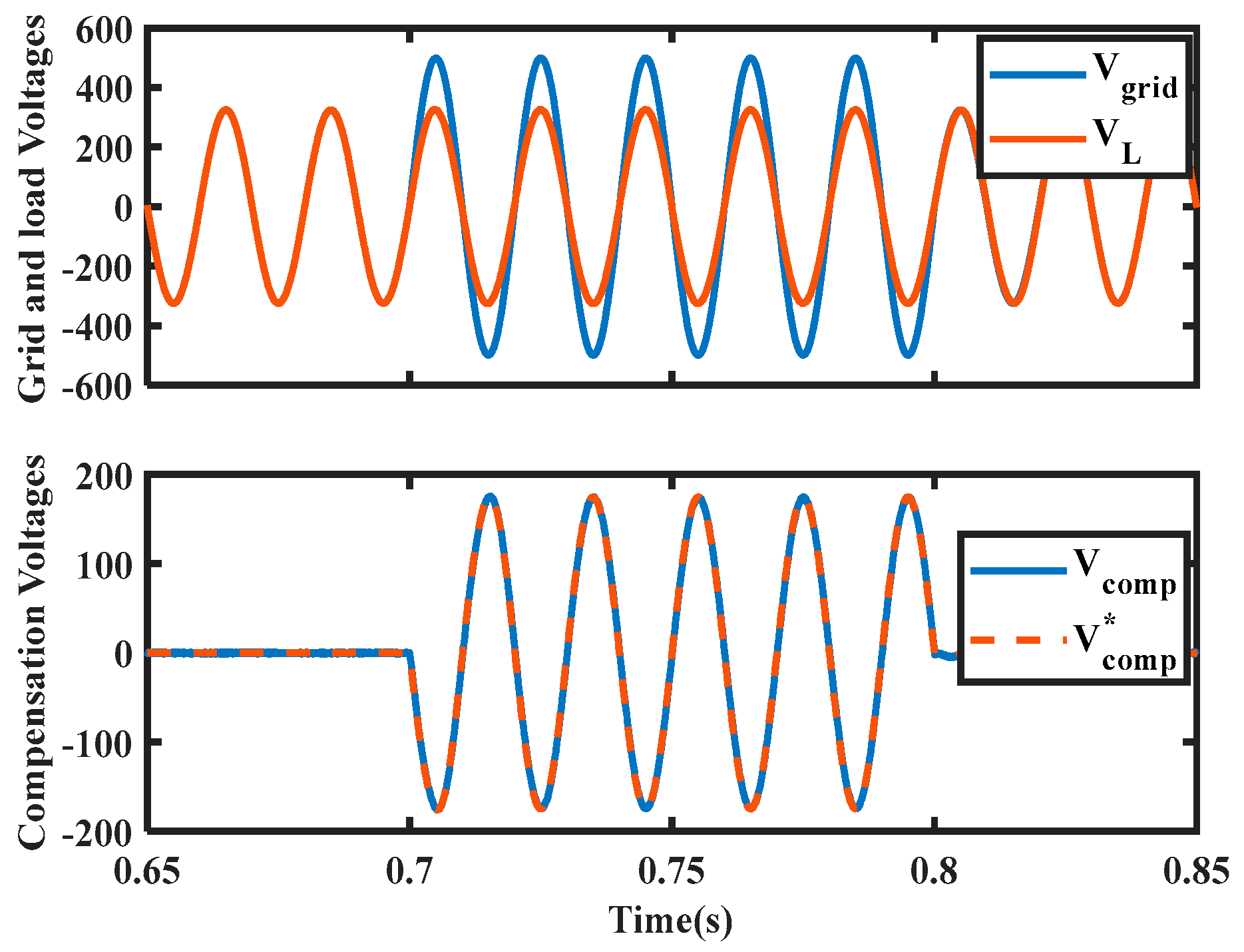
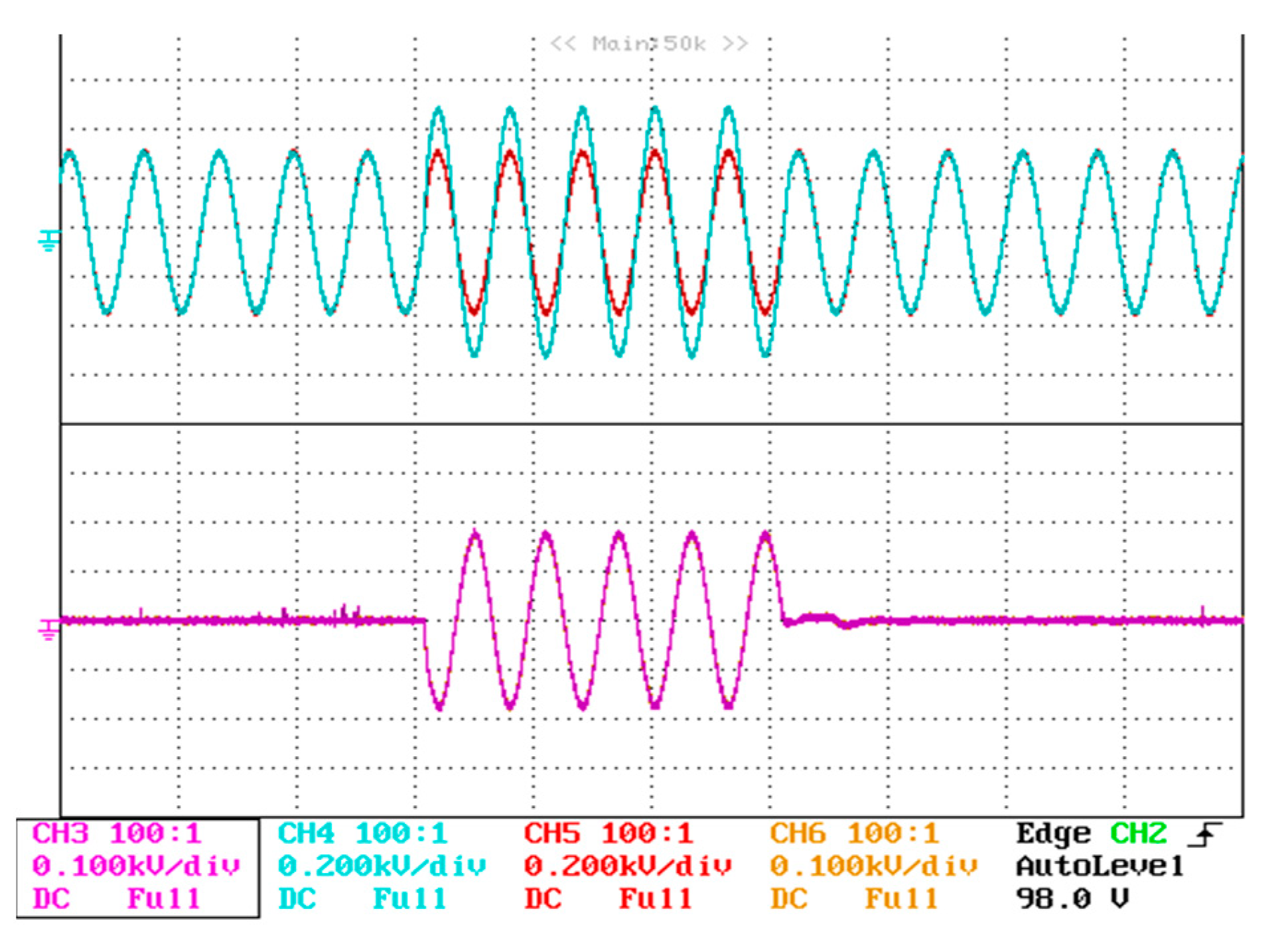
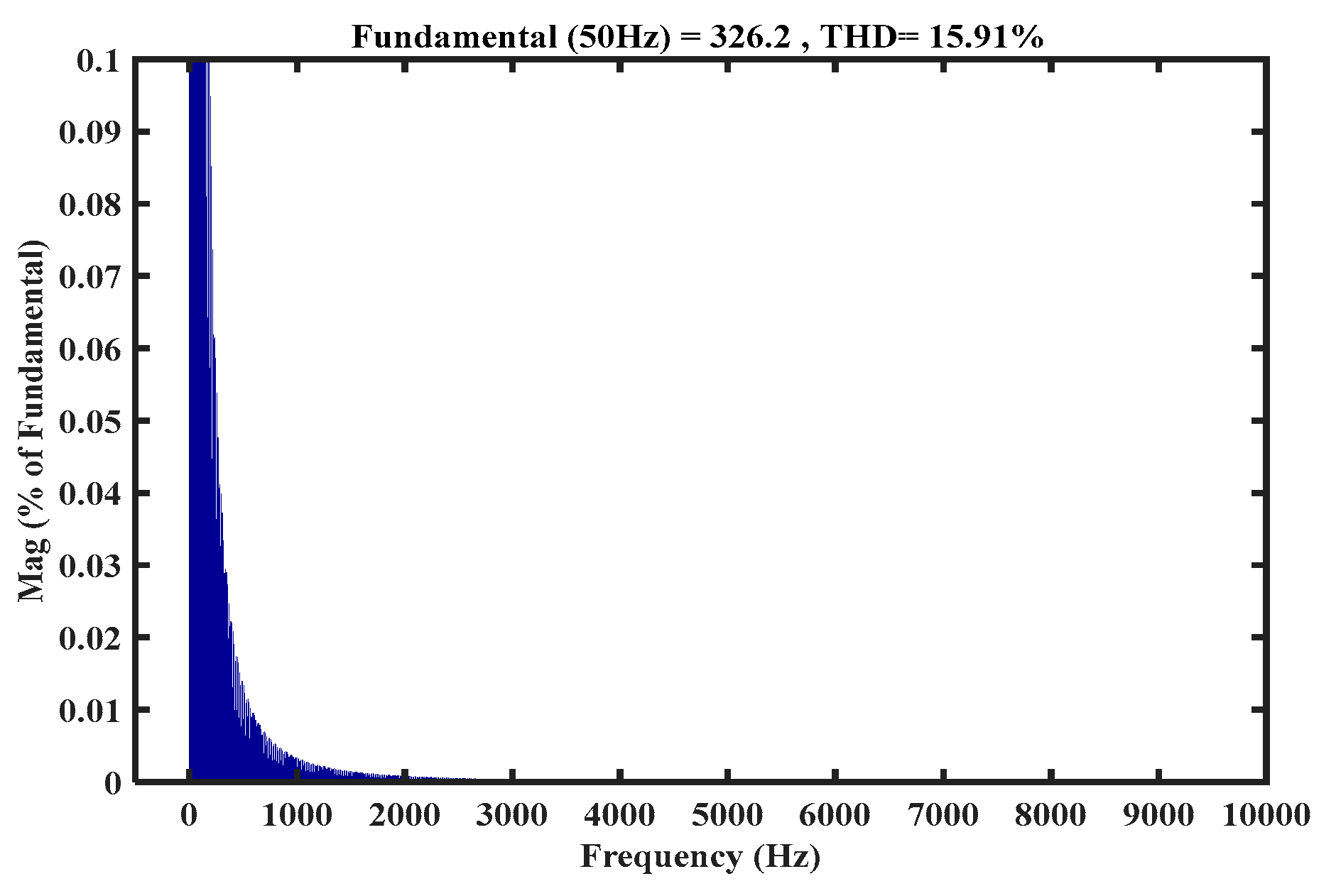
4. Simulation and Real-Time Implementation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Twidell, J.; Weir, T. Renewable Energy Resources, 3rd ed.; Routledge: London, UK, 2015. [Google Scholar] [CrossRef]
- Bollen, M. Understanding Power Quality Problems, Voltage Sags and Interruptions; IEEE Press: Piscataway, NJ, USA, 2000. [Google Scholar]
- Li, Y.W.; Blaabjerg, F.; Vilathgamuwa, D.M.; Loh, P.C. Design and comparison of high performance stationary-frame controllers for DVR implementation. IEEE Trans. Power Electron. 2007, 22, 602–612. [Google Scholar] [CrossRef]
- Li, Y.W.; Vilathgamuwa, D.M.; Blaabjerg, F.; Loh, P.C. A robust control scheme for medium-voltage-level DVR implementation. IEEE Trans. Ind. Electron. 2007, 54, 2249–2261. [Google Scholar]
- Biricik, S.; Komurcugil, H. Optimized sliding mode control to maximize existence region for single-phase dynamic voltage restorers. IEEE Trans. Ind. Inform. 2012, 12, 1486–1497. [Google Scholar] [CrossRef]
- Naidu, T.A.; Arya, S.R.; Maurya, R. Multi-objective dynamic voltage restorer with modified EPLL control and optimized PI controller gains. IEEE Trans. Power Electron. 2018, 34, 2181–2192. [Google Scholar] [CrossRef]
- Li, P.; Xie, L.; Han, J.; Pang, S.; Li, P. A new voltage compensation philosophy for dynamic voltage restorer to mitigate voltage sags using three-phase voltage ellipse parameters. IEEE Trans. Power Electron. 2018, 33, 1154–1166. [Google Scholar] [CrossRef]
- Torres, A.P.; Sanchez, P.R.; Batlle, V.F. A two degree of freedom resonant control scheme for voltage-sag compensation in dynamic voltage restorers. IEEE Trans. Power Electron. 2018, 33, 4852–4867. [Google Scholar] [CrossRef]
- Pradhan, M.; Mishra, M.K. Dual P-Q theory based energy optimized dynamic voltage restorer for power quality improvement in distribution system. IEEE Trans. Ind. Electron. 2018, 66, 2946–2955. [Google Scholar] [CrossRef]
- Babaei, E.; Kangarlu, M.F. Voltage quality improvement by a dynamic voltage restorer based on a direct three-phase converter with fictitious DC link. IET Gener. Transm. Distrib. 2011, 5, 814–823. [Google Scholar] [CrossRef]
- Ebrahimzadeh, E.; Farhangi, S.; Iman-Eini, H.; Ajaei, F.B.; Iravani, R. Improved phasor estimation method for dynmaic voltage restorer applications. IEEE Trans. Power Deliv. 2015, 30, 1467–1477. [Google Scholar] [CrossRef]
- Li, B.H.; Choi, S.S.; Vilathgamuwa, D.M. Transformerless dynamic voltage restorer. IEE Gener. Transm. Distrib. 2002, 149, 263–273. [Google Scholar] [CrossRef]
- Sng, E.K.K.; Choi, S.S.; Vilathgamuwa, D.M. Analysis of series compensation and DC-link voltage controls of a transformerless self-charging dynamic voltage restorer. IEEE Trans. Power Deliv. 2004, 19, 1511–1518. [Google Scholar] [CrossRef]
- Kumar, C.; Mishra, M.K. Predictive voltage control of transformerless dynamic voltage restorer. IEEE Trans. Ind. Electron. 2015, 62, 2693–2697. [Google Scholar] [CrossRef]
- Komurcugil, H.; Biricik, S. Time-varying and constant switching frequency-based sliding-mode control methods for transformerless DVR employing half-bridge VSI. IEEE Trans. Ind. Electron. 2017, 64, 2570–2579. [Google Scholar] [CrossRef]
- Loh, P.C.; Vilathgamuwa, D.M.; Tang, S.K.; Long, H.L. Multilevel dynamic voltage restorer. IEEE Power Electron. Lett. 2004, 2, 125–130. [Google Scholar] [CrossRef]
- Shahabadini, M.; Iman-Eini, H. Improving the Performance of a Cascaded H-Bridge-Based Interline Dynamic Voltage Restorer. IEEE Trans. Power Deliv. 2016, 31, 1160–1167. [Google Scholar] [CrossRef]
- Wang, B.; Venkataramanan, G.; Illindala, M. Operation and control of a dynamic voltage restorer using transformer coupled H-bridge converters. IEEE Trans. Power Electron. 2006, 21, 1053–1061. [Google Scholar] [CrossRef]
- Roncero-Sanchez, P.; Acha, E. Dynamic voltage restorer based on flying capacitor multilevel converters operated by repetitive control. IEEE Trans. Power Del. 2009, 24, 951–960. [Google Scholar] [CrossRef]
- Khoshkbar-Sadigh, A.; Farzamkia, S.; Dargahi, V. Dynamic Voltage Restorer Controlled with Energy Minimized Compensation Method Based on Double Flying Capacitor Multicell Inverter. In Proceedings of the 2020 Clemson University Power Systems Conference (PSC), Clemson, SC, USA, 10–13 March 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Tolbert, L.M.; Peng, F.Z.; Habetler, T.G. A multilevel converter-based universal power conditioner. IEEE Trans. Ind. Appl. 2000, 36, 596–603. [Google Scholar] [CrossRef]
- Barros, J.D.; Silva, J.F. Multilevel optimal predictive dynamic voltage restorer. IEEE Trans. Ind. Electron. 2010, 57, 2747–2760. [Google Scholar] [CrossRef]
- Khoshkbar Sadigh, A.; Babaei, E.; Hosseini, S.H.; Farasat, M. Dynamic voltage restorer based on stacked multicell converter. In Proceedings of the IEEE International Symposium on Industrial Electronics and Application (ISIEA2009), Kuala Lumpur, Malaysia, 4–6 October 2009; pp. 419–424. [Google Scholar]
- Komurcugil, H.; Bayhan, S.; Guler, N.; Abu-Rub, H.; Bagheri, F. A simplified sliding-mode control method for multi-level transformerless DVR. IET Power Electron. 2022, 15, 764–774. [Google Scholar] [CrossRef]
- Trabelsi, M.; Komurcugil, H.; Refaat, S.S.; Abu-Rub, H. Model predictive control of packed U cells based transformerless single-phase dynamic voltage restorer. In Proceedings of the 19th IEEE International Conference on Industrial Technology (ICIT2018), Lyon, France, 20–22 February 2018; pp. 1926–1931. [Google Scholar]
- Ounejjar, Y.; Al-Haddad, K.; Gregoire, L.A. Packed U cells multilevel converter topology: Theoretical study and experimental validation. IEEE Trans. Ind. Electron. 2011, 58, 1294–1306. [Google Scholar] [CrossRef]
- Vahedi, H.; Al-Haddad, K. Real-time implementation of a seven-level packed U-cell inverter with a low-switching-frequency voltage regulator. IEEE Trans. Power Electron. 2016, 31, 5967–5973. [Google Scholar] [CrossRef]
- Trabelsi, M.; Bayhan, S.; Ghazi, K.A.; Abu-Rub, H.; Ben-Brahim, L. Finite-Control-Set Model Predictive Control for Grid-Connected Packed-U-Cells Multilevel Inverter. IEEE Trans. Ind. Electron. 2016, 63, 7286–7295. [Google Scholar] [CrossRef]
- Vahedi, H.; Labbé, P.A.; Al-Haddad, K. Sensor-less five-level packed U-Cell (PUC5) inverter operating in standalone and grid-connected modes. IEEE Trans. Ind. Inform. 2016, 12, 361–370. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DVR Topology | Advantages | Disadvantages |
|---|---|---|
| Two-level Inverter |
|
|
| NPC Inverter |
|
|
| T-type Inverter |
|
|
| CHB Inverter |
|
|
| FCI Inverter |
|
|
| PUC Inverter |
|
|
| State | VAN | S1 | S2 | S3 |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | −V2 | 0 | 0 | 1 |
| 3 | V2 − V1 | 0 | 1 | 0 |
| 4 | −V1 | 0 | 1 | 1 |
| 5 | V1 | 1 | 0 | 0 |
| 6 | V1 − V2 | 1 | 0 | 1 |
| 7 | V2 | 1 | 1 | 0 |
| 8 | 0 | 1 | 1 | 1 |
| Parameters | Values |
|---|---|
| AC grid RMS voltage (Vgrid) | 230 V |
| Input voltage (V1) | 400 V |
| Filter inductor (Lf) | 0.7 mH |
| Filter internal resistor (rf) | 0.5 Ω |
| Filter capacitor (Ccomp) | 50 μF |
| PUC capacitors (C1, C2) | 100 μF |
| Grid inducor (Lg) | 0.1 mH |
| Load inductor (LL) | 10 mH |
| Load resistor (RL) | 50 Ω |
| Sampling time (Ts) | 35 μs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trabelsi, M.; Komurcugil, H.; Bayhan, S.; Abu-Rub, H. An Effective Transformerless PUC7-Based Dynamic Voltage Restorer Using Model Predictive Control. Sustainability 2023, 15, 3041. https://doi.org/10.3390/su15043041
Trabelsi M, Komurcugil H, Bayhan S, Abu-Rub H. An Effective Transformerless PUC7-Based Dynamic Voltage Restorer Using Model Predictive Control. Sustainability. 2023; 15(4):3041. https://doi.org/10.3390/su15043041
Chicago/Turabian StyleTrabelsi, Mohamed, Hasan Komurcugil, Sertac Bayhan, and Haitham Abu-Rub. 2023. "An Effective Transformerless PUC7-Based Dynamic Voltage Restorer Using Model Predictive Control" Sustainability 15, no. 4: 3041. https://doi.org/10.3390/su15043041
APA StyleTrabelsi, M., Komurcugil, H., Bayhan, S., & Abu-Rub, H. (2023). An Effective Transformerless PUC7-Based Dynamic Voltage Restorer Using Model Predictive Control. Sustainability, 15(4), 3041. https://doi.org/10.3390/su15043041