
Continuous Dynamic Analysis Method and Case Verification of Cable Structure Based on Digital Twin



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Research Background
1.2. Literature Review
1.3. Research Significance
2. Continuous Dynamic Analysis Method of Cable Structure Based on DT
2.1. Continuous Dynamic Analysis Mechanism
2.2. Multi-Dimensional DT Model Establishment Method
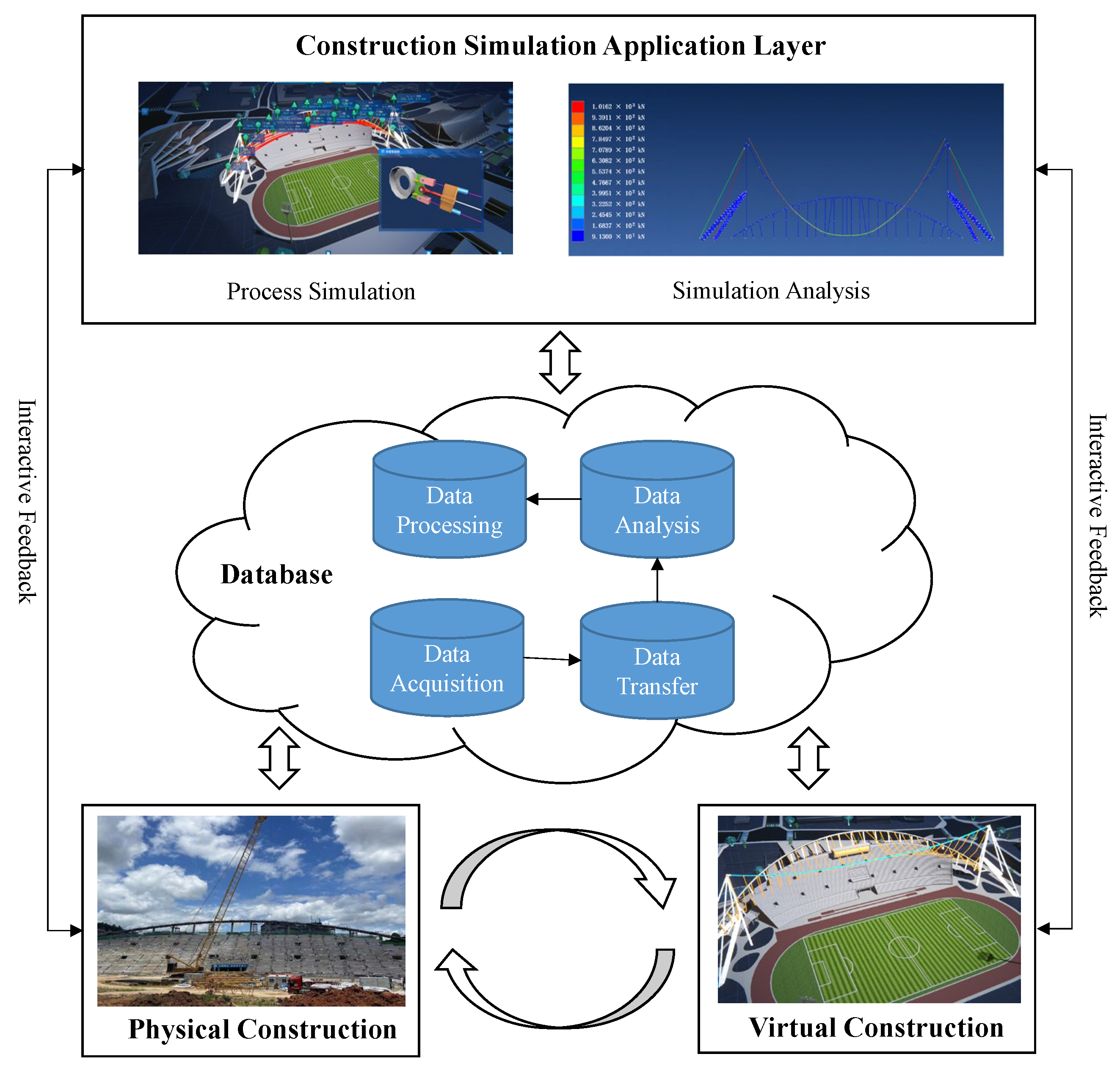
2.2.1. DT Framework for Dynamic Construction Process of Cable Structures
2.2.2. Construction of Multi-Dimensional DT Model
2.3. Optimization of Finite Element Calculation Method for Cable Structure
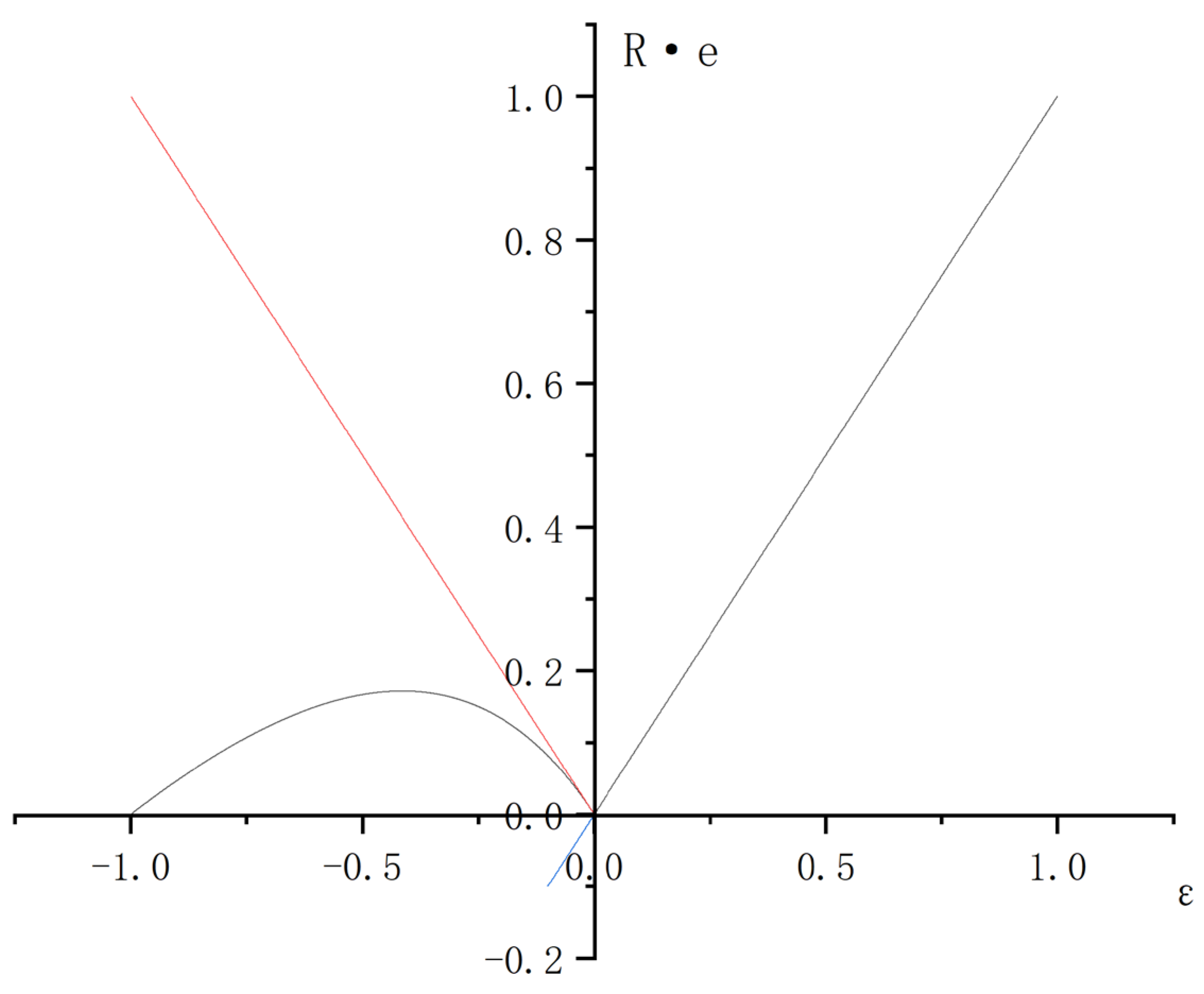
2.3.1. Correction of the Intrinsic Constitution Equation and Equilibrium Equation
2.3.2. Adjustment of Equations during Construction Simulation
2.3.3. Calculation Method of Connection of Cable Unit and Rigid Unit
3. Case Study
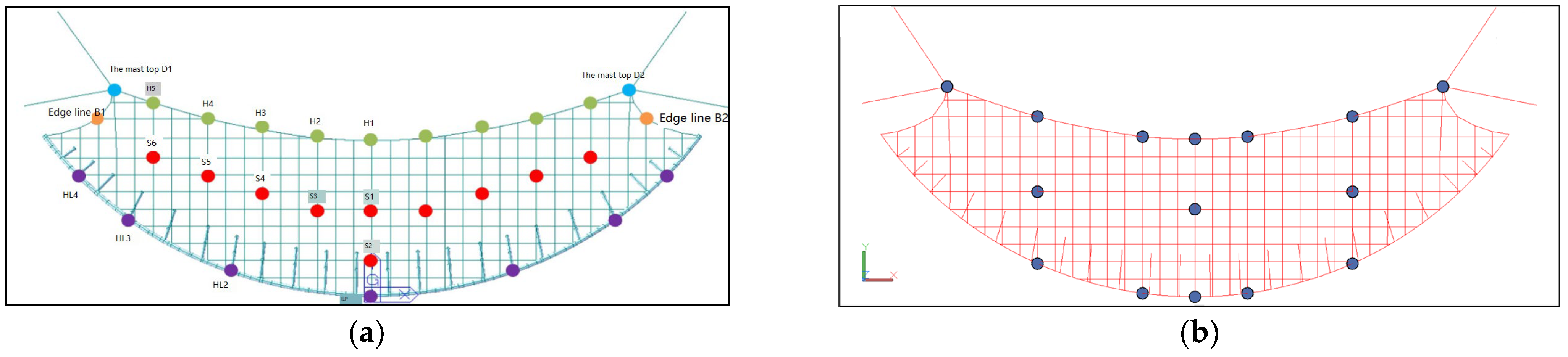
3.1. Multidimensional DT Modeling of Cable Structures
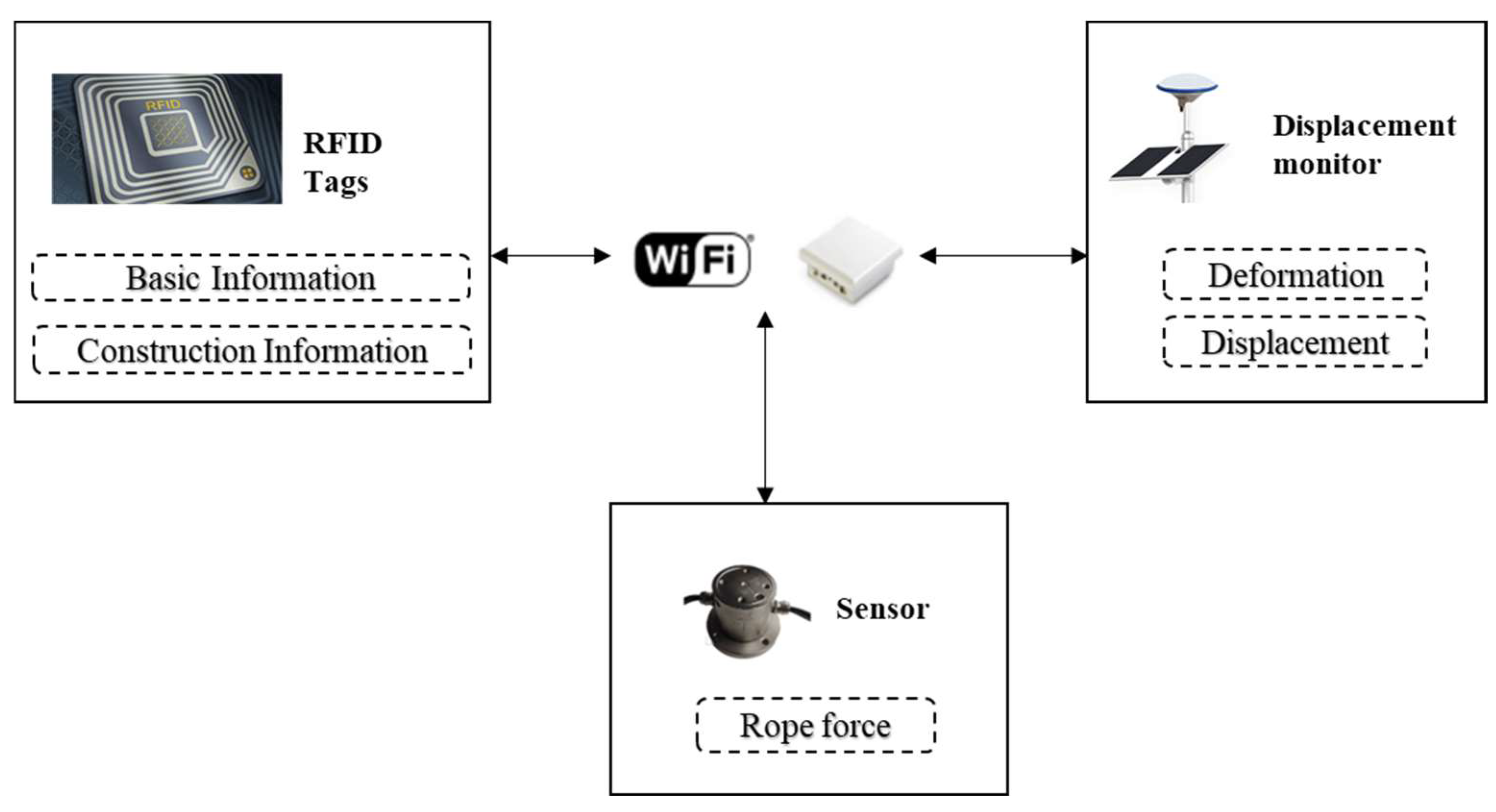
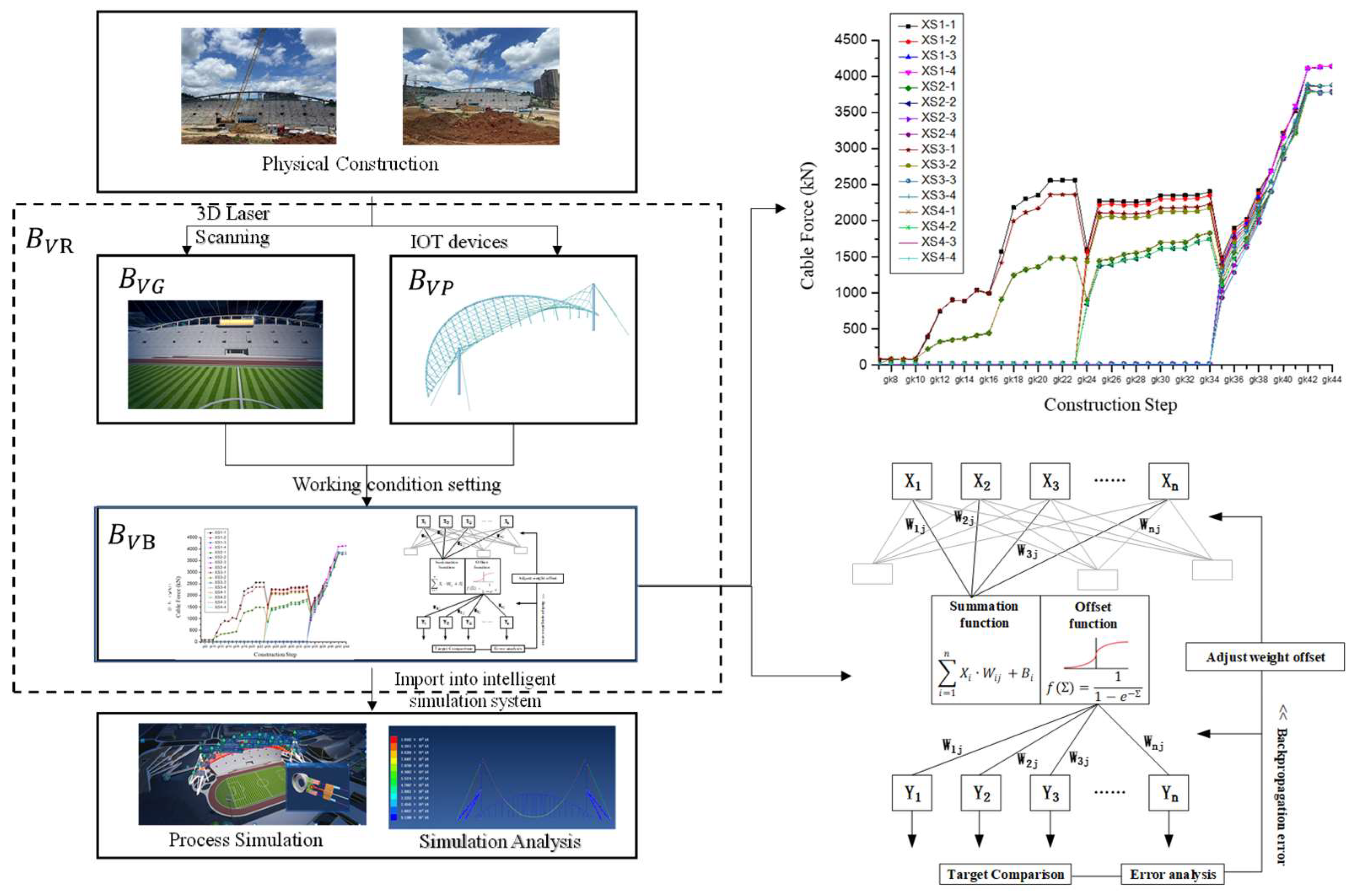
3.1.1. Information Capture in Physical Space
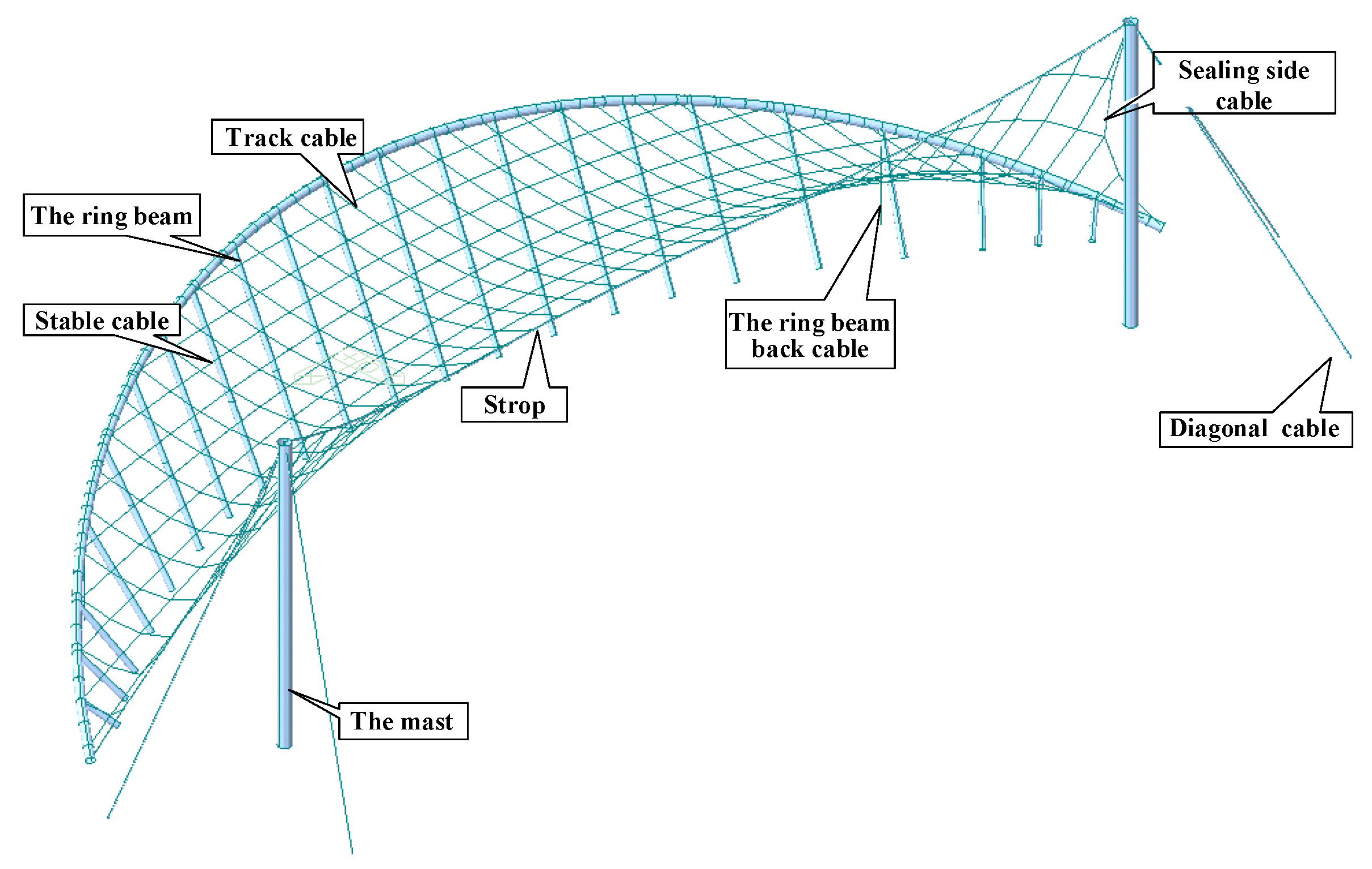
3.1.2. Virtual Construction Model Construction
3.2. Development of Intelligent Simulation System Based on DT
3.2.1. System Functional Requirements Analysis
3.2.2. System Solution Design
- I.
- Simulation Calculation Function: This feature is responsible for executing the continuous dynamic analysis of the cable structure. It achieves this by optimizing the finite element calculation method used for cable structures. The optimization is designed to enhance the accuracy and efficiency of the simulation process. By employing this function, users can obtain reliable and comprehensive insights into the structural behavior of the cable system during various construction phases.
- II.
- Simulation Result Function: This component is focused on displaying and filtering the outcomes generated from the continuous dynamic analysis. Users can access the simulation results, which may include information about structural displacement, cable forces, deformations, and other relevant mechanical responses. The simulation results can be presented in a structured and visually informative manner, allowing users to better comprehend the dynamic behavior of the cable structure. Additionally, this function may provide filtering options to refine and customize the displayed results. Users can select specific parameters, time frames, or construction stages for analysis, enabling them to extract meaningful insights from the simulation data. The simulation model’s dynamic visualization is a notable aspect of this function. Users can explore the simulation models interactively, switch between different views, and manipulate the visual representation to gain a clearer understanding of the structural behavior. Moreover, the ability to switch between simulation models from various projects through new creations and imports enhances flexibility and adaptability in the analysis process.
- I.
- Early Warning Setting Function: This component is dedicated to configuring parameters that govern the early warning system. Users can establish a comparison between real-time monitoring values of key structural components’ mechanical responses and the corresponding simulation values. For each component, users can define threshold values that act as triggers for early warnings. When the real-time monitoring value surpasses the predefined threshold, the system will initiate an early warning to indicate a potential issue.
- II.
- Early Warning Display Function: The primary role of this feature is to provide an interface for users to access and visualize early warnings. When the system detects that a monitored component’s mechanical response exceeds the set threshold value, it generates an early warning. This information is then compiled into a warning list, which users can access through this function. The warning list presents all pertinent details about the components that have triggered early warnings. Additionally, to enhance user understanding and rapid response, this function employs a 3D model visualization approach. By overlaying early warning markers on the 3D model of the cable structure, users can swiftly identify the specific location of the components causing concern. This visual representation is highly effective in conveying the urgency and location of potential issues.
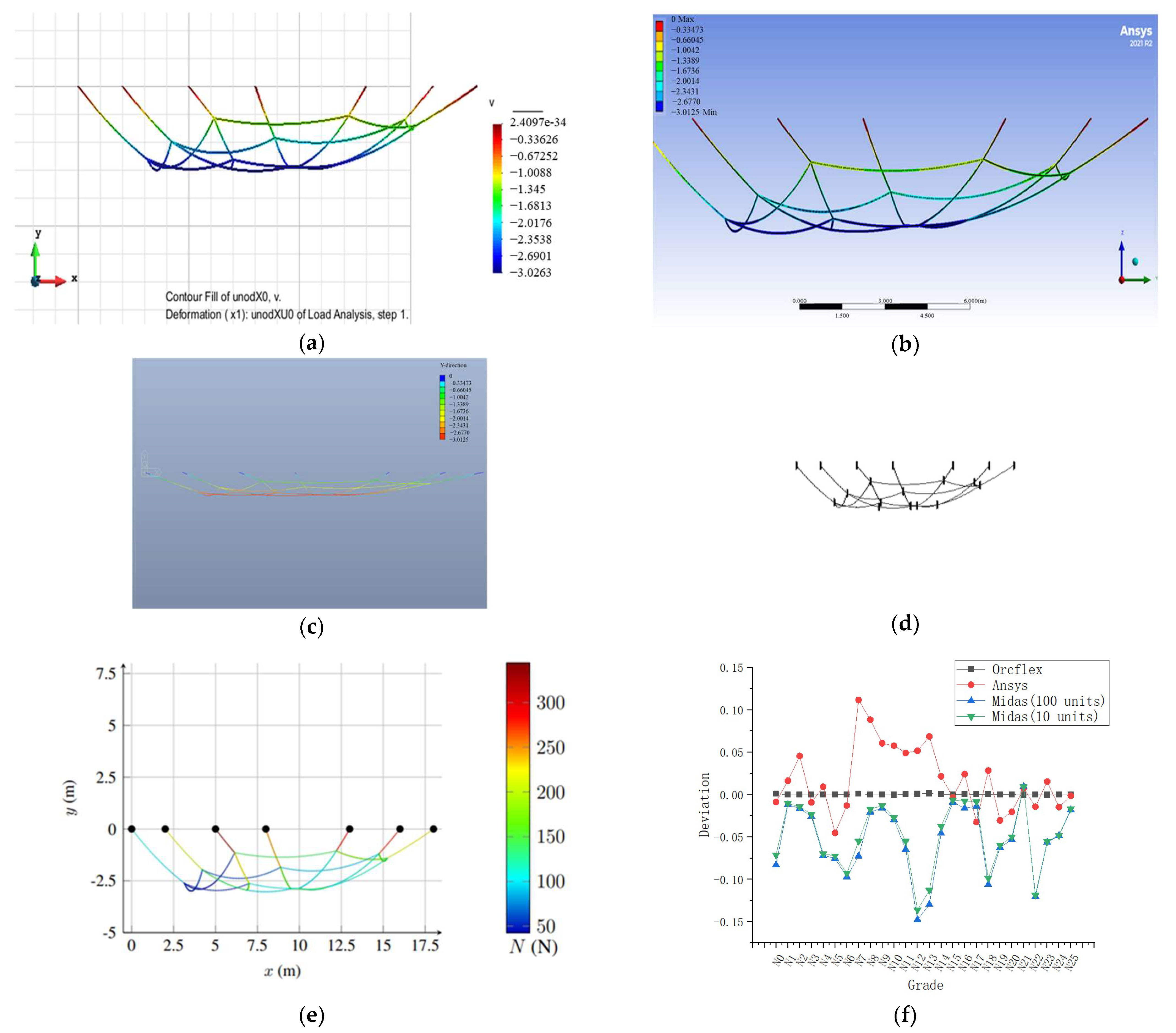
3.2.3. System Reliability Check
- (1)
- In the single cable self-weight problem, the displacement results obtained from the modified cable unit, Orcaflex, Midas, and the analytical solution exhibit strong agreement. Additionally, the maximum displacement error between Ansys and the analytical solution is approximately 4.58%. In the case of the single cable subjected to a point load, the results obtained from the modified cable unit, Orcaflex, and Midas closely correspond, whereas the Ansys results are not directly comparable due to loading considerations. For various other single cable scenarios, the maximum error between the modified cable unit and Midas is 5.71%, with an error of about 2.1% when considering only self-weight.
- (2)
- In the self-weight problem of the cable network, the shapes of the modified cable unit, Orcaflex, Midas, and Ansys exhibit remarkable similarity. Regarding cable force, the difference between the modified cable unit and Orcaflex is minimal, with a maximum discrepancy of only 0.14%. Midas is compared with a single 100-unit and a 10-unit planar model due to the relatively lower number of units per cable in the network. It is observed that the difference between the 100-unit and 10-unit modified cable units is negligible. The average discrepancy between the modified cable units and Midas is approximately 5%, with specific values of 5.46% for 100 units and 4.95% for 10 units. There are four groups showing errors exceeding 10% in the 100-unit comparison and three groups in the 10-unit comparison, all of which occur at internal nodes of the cable network, with deviations remaining within 10% or less.
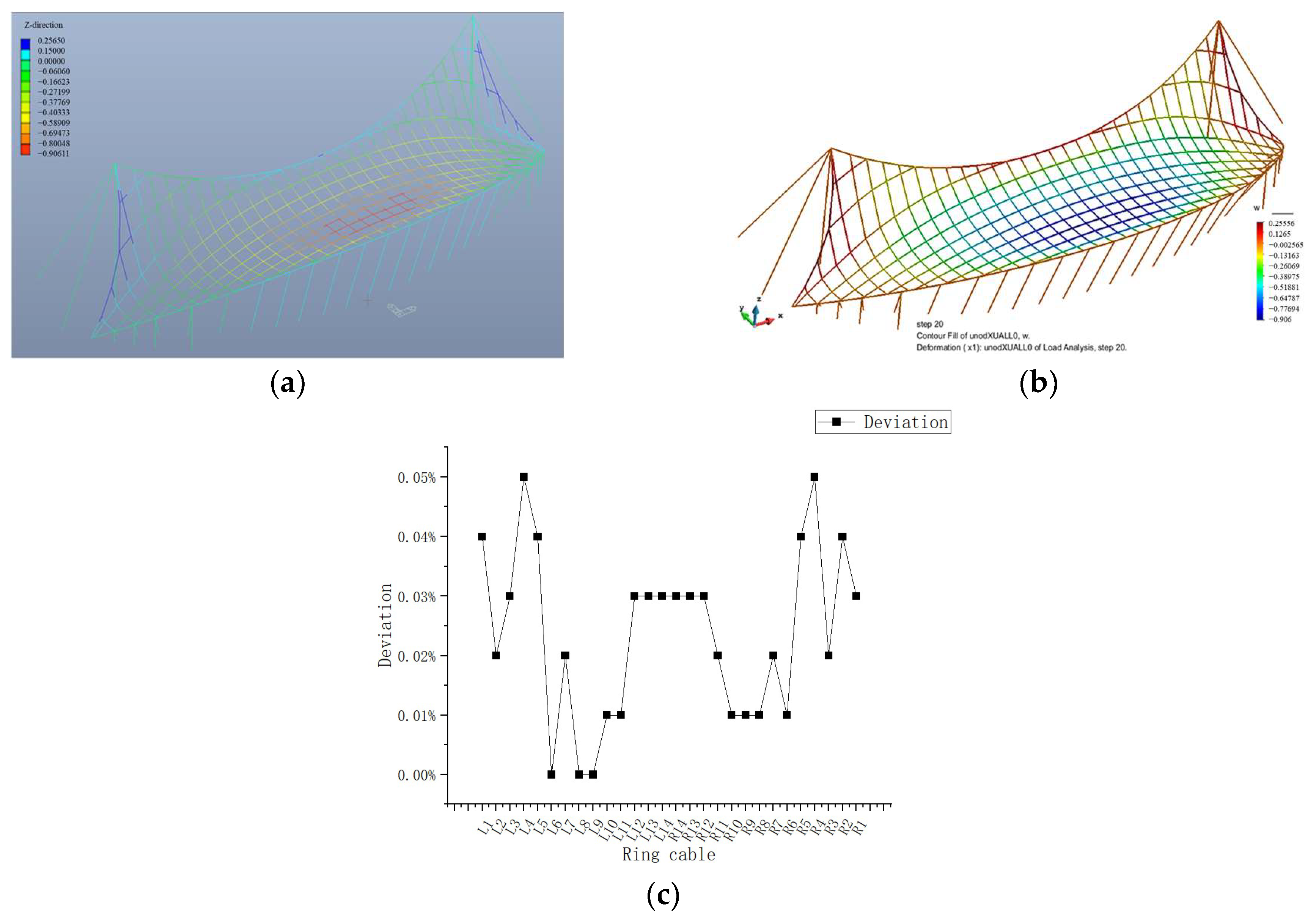
- (3)
- From the comparison of the beam cable forces, it can be observed that the discrepancies in cable forces among the diagonal cable, vertical cable, ring cable, left and right diagonal cable platform, and Midas are all within 0.6%, indicating a close alignment. Although there is a difference of more than 20% in the vertical cable force, a specific analysis reveals that the vertical cable force exhibiting larger divergence differs in magnitude from the normal cable force by an order of magnitude. As a result, this difference has minimal influence on the analysis outcomes. The discrepancies in the transverse cable force are predominantly constrained to within ±1.7%, falling within an acceptable range.
3.3. Continuous Dynamic Simulation Analysis
4. Conclusions
- I.
- The DT model of the construction process of the cable structure integrates the construction mechanical response values with the finite element analysis values, realizing the continuous comparison in time.
- II.
- The finite element optimization method of the cable structure adopts the same analytical model to calculate all stages from lifting to tension forming. The results showed that the optimization method has good convergence and the average calculation accuracy is higher than 97%.
- III.
- The Intelligent Simulation System developed based on the continuous dynamic simulation method realizes continuous analysis of each stage of cable structure construction in the actual project, which ensures the safety and quality of the construction process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, X.; Chen, Z.; Liu, H.; Yu, Y. Experimental study on stress relaxation properties of structural cables. Constr. Build. Mater. 2018, 175, 777–789. [Google Scholar] [CrossRef]
- Kotsovinos, P.; Judge, R.; Walker, G.; Woodburn, P. Fire performance of structural cables: Current understanding, knowledge gaps, and proposed research agenda. J. Struct. Eng. 2020, 146, 03120002. [Google Scholar] [CrossRef]
- Shi, G.; Liu, Z.; Xian, D.; Zhang, R. Intelligent Assessment Method of Structural Reliability Driven by Carrying Capacity Sustainable Target: Taking Bearing Capacity as Criterion. Sustainability 2023, 15, 10655. [Google Scholar] [CrossRef]
- Li, G.; Xiao, L.; Huang, Q.; Pu, L.; Wei, X. Experimental investigation on the performance of Cable-Girder anchorage structure of hybrid Cable-Stayed suspension bridges. Structures 2023, 56, 104911. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, J.Z.; Tafsirojjaman, T.; Yue, Q.R.; Tan, C.; Che, G.J. CFRP lamella stay-cable and its force measurement based on microwave radar. Case Stud. Constr. Mater. 2022, 16, e00824. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, K.; Cheng, Z.; Deng, P.; Zhang, Q. Competing mechanism between vertical stiffness and anti-slip safety in double-cable multi-span suspension bridges. Struct. Infrastruct. Eng. 2022, 1–13. [Google Scholar] [CrossRef]
- Liu, M.; Li, X.; Xing, G.; Wu, M.; Li, J. Monitoring and simulation analysis of construction process for large-span spatial spoke chord-supported truss structure. J. Archit. Civ. Eng. 2023, 40, 95–102. [Google Scholar]
- Ye, X.; Ge, J.; Cheng, S.; Wang, W.; Zhang, G.; Hu, Q. Dynamic simulation of cable dome construction. J. Build. Struct. 2012, 33, 60–66. [Google Scholar]
- Han, F.; Dan, D.; Zou, Y.; Lei, H. Experimental and theoretical study on cable-supporting system. Mech. Syst. Signal Process. 2020, 140, 106638. [Google Scholar]
- Yao, Y.; Yan, M.; Bao, Y. Measurement of cable forces for automated monitoring of engineering structures using fiber optic sensors: A review. Autom. Constr. 2021, 126, 103687. [Google Scholar] [CrossRef]
- Zhang, L.; Qiu, G.; Chen, Z. Structural health monitoring methods of cables in cable-stayed bridge: A review. Measurement 2021, 168, 108343. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.M. Review of machine-vision based methodologies for displacement measurement in civil structures. J. Civ. Struct. Health Monit. 2018, 8, 91–110. [Google Scholar] [CrossRef]
- Kim, J.W.; Park, S. Magnetic flux leakage sensing and artificial neural network pattern recognition-based automated damage detection and quantification for wire rope non-destructive evaluation. Sensors 2018, 18, 109. [Google Scholar] [CrossRef] [PubMed]
- Qu, Y.; Zhang, H.; Zhao, R.; Liao, L.; Zhou, Y. Research on the method of predicting corrosion width of cables based on the spontaneous magnetic flux leakage. Materials 2019, 12, 2154. [Google Scholar] [CrossRef] [PubMed]
- Mehrabi, A.B.; Ligozio, C.A.; Ciolko, A.T.; Wyatt, S.T. Evaluation, rehabilitation planning, and stay-cable replacement design for the hale boggs bridge in Luling, Louisiana. J. Bridge Eng. 2010, 15, 364–372. [Google Scholar] [CrossRef]
- Zhou, G.D.; Yi, T.H. A summary review of correlations between temperatures and vibration properties of long-span bridges. Math. Probl. Eng. 2014, 2014, 638209. [Google Scholar] [CrossRef]
- Zejli, H.; Gaillet, L.; Laksimi, A.; Benmedakhene, S. Detection of the presence of broken wires in cables by acoustic emission inspection. J. Bridge Eng. 2012, 17, 921–927. [Google Scholar] [CrossRef]
- Hu, D.; Guo, Y.; Chen, X.; Zhang, C. Cable force health monitoring of Tongwamen bridge based on fiber Bragg grating. Appl. Sci. 2017, 7, 384. [Google Scholar] [CrossRef]
- Zheng, R.; Liu, L.; Zhao, X.; Chen, Z.; Zhang, C.; Hua, X. Investigation of measurability and reliability of adhesive-bonded built-in fiber Bragg grating sensors on steel wire for bridge cable force monitoring. Measurement 2018, 129, 349–357. [Google Scholar] [CrossRef]
- Dong, C.Z.; Catbas, F.N. A review of computer vision–based structural health monitoring at local and global levels. Struct. Health Monit. 2021, 20, 692–743. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Yan, B.; Xu, B.; Fan, Q.; Xie, Y. Global Navigation Satellite System-based positioning technology for structural health monitoring: A review. Struct. Control Health Monit. 2020, 27, e2467. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, Q.; Xi, R.; Li, C.; Li, G. Review of bridge structural health monitoring based on GNSS: From displacement monitoring to dynamic characteristic identification. IEEE Access 2021, 9, 80043–80065. [Google Scholar] [CrossRef]
- Tian, Y.; Chen, C.; Sagoe-Crentsil, K.; Zhang, J.; Duan, W. Intelligent robotic systems for structural health monitoring: Applications and future trends. Autom. Constr. 2022, 139, 104273. [Google Scholar] [CrossRef]
- Li, Y.Q.; Zhao, H.W.; Yue, Z.X.; Li, Y.W.; Zhang, Y.; Zhao, D.C. Real-Time Intelligent Prediction Method of Cable’s Fundamental Frequency for Intelligent Maintenance of Cable-Stayed Bridges. Sustainability 2023, 15, 4086. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Liu, J.; Liu, X.; Liu, Q.; Qu, T.; Hu, T.; Zhang, Z.; Xiang, F.; Xu, W.; et al. Digital twin and its potential application exploration. Comput. Integr. Manuf. Syst. 2018, 24, 1–18. [Google Scholar]
- Grieves, M. Intelligent digital twins and the development and management of complex systems. Digit. Twin 2022, 2, 8. [Google Scholar] [CrossRef]
- Hosamo, H.H.; Imran, A.; Cardenas-Cartagena, J.; Svennevig, P.R.; Svidt, K.; Nielsen, H.K. A review of the digital twin technology in the AEC-FM industry. Adv. Civ. Eng. 2022, 2022, 2185170. [Google Scholar] [CrossRef]
- Tuhaise, V.V.; Tah, J.H.M.; Abanda, F.H. Technologies for digital twin applications in construction. Autom. Constr. 2023, 152, 104931. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.; Qi, Q.; Zhang, H.; Sui, F.; Wang, T.; Xu, H.; Huang, Z.; et al. Five-dimension digital twin model and its ten applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar]
- Tao, F.; Zhang, C.; Qi, Q.; Zhang, H. Digital twin maturity model. Comput. Integr. Manuf. Syst. 2022, 28, 1267–1281. [Google Scholar]
- Liu, Z.; Li, A.; Meng, X.; Shi, G.; Cao, C. Establishment Method of Digital Twin Model for Hoisting Safety Risk Management of Assembly Building. J. Inf. Technol. Civ. Eng. Archit. 2022, 14, 26–33. [Google Scholar]
- Liu, Z.; Shi, G.; Meng, X.; Sun, Z. Intelligent control of building operation and maintenance processes based on global navigation satellite system and digital twins. Remote Sens. 2022, 14, 1387. [Google Scholar] [CrossRef]
- Phoon, K.K.; Zhang, W. Future of machine learning in geotechnics. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2023, 17, 7–22. [Google Scholar] [CrossRef]
- Zhang, W.; Gu, X.; Tang, L.; Yin, Y.; Liu, D.; Zhang, Y. Application of machine learning, deep learning and optimization algorithms in geoengineering and geoscience: Comprehensive review and future challenge. Gondwana Res. 2022, 109, 1–17. [Google Scholar] [CrossRef]
- Zhang, W.; Li, H.; Li, Y.; Liu, H.; Chen, Y.; Ding, X. Application of deep learning algorithms in geotechnical engineering: A short critical review. Artif. Intell. Rev. 2022, 54, 5633–5673. [Google Scholar] [CrossRef]
- Shehadeh, A.; Alshboul, O.; Al Mamlook, R.E.; Hamedat, O. Machine learning models for predicting the residual value of heavy construction equipment: An evaluation of modified decision tree, LightGBM, and XGBoost regression. Autom. Constr. 2022, 129, 103827. [Google Scholar] [CrossRef]
- Alshboul, O.; Shehadeh, A.; Mamlook, R.E.A.; Almasabha, G.; Almuflih, A.S.; Alghamdi, S.Y. Prediction liquidated damages via ensemble machine learning model: Towards sustainable highway construction projects. Sustainability 2022, 14, 9303. [Google Scholar] [CrossRef]
- Bertrand, C.; Acary, V.; Lamarque, C.H.; Ture Savadkoohi, A. A robust and efficient numerical finite element method for cables. Int. J. Numer. Methods Eng. 2020, 121, 4157–4186. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, M.; Liu, Z.; Dezhkam, M.; Zhao, Y.; Hu, Y. Continuous Dynamic Analysis Method and Case Verification of Cable Structure Based on Digital Twin. Sustainability 2023, 15, 16125. https://doi.org/10.3390/su152216125
Wang Z, Li M, Liu Z, Dezhkam M, Zhao Y, Hu Y. Continuous Dynamic Analysis Method and Case Verification of Cable Structure Based on Digital Twin. Sustainability. 2023; 15(22):16125. https://doi.org/10.3390/su152216125
Chicago/Turabian StyleWang, Zeqiang, Mingming Li, Zhansheng Liu, Majid Dezhkam, Yifeng Zhao, and Yang Hu. 2023. "Continuous Dynamic Analysis Method and Case Verification of Cable Structure Based on Digital Twin" Sustainability 15, no. 22: 16125. https://doi.org/10.3390/su152216125
APA StyleWang, Z., Li, M., Liu, Z., Dezhkam, M., Zhao, Y., & Hu, Y. (2023). Continuous Dynamic Analysis Method and Case Verification of Cable Structure Based on Digital Twin. Sustainability, 15(22), 16125. https://doi.org/10.3390/su152216125