
Investigation on the Damping Effect of FST System under Moving Load Using the Track–Tunnel-Layered Saturated Ground Model


Abstract
:1. Introduction
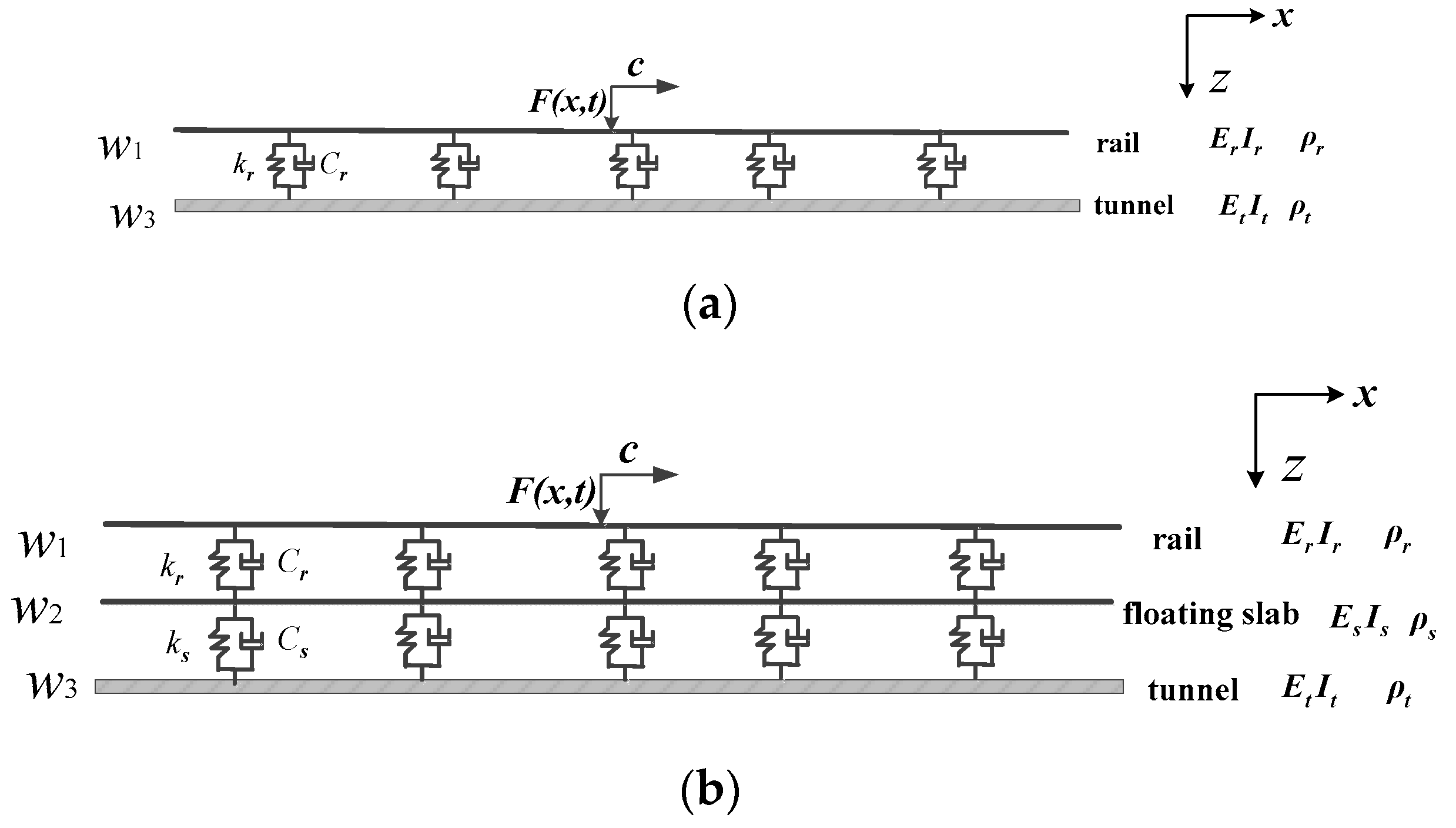
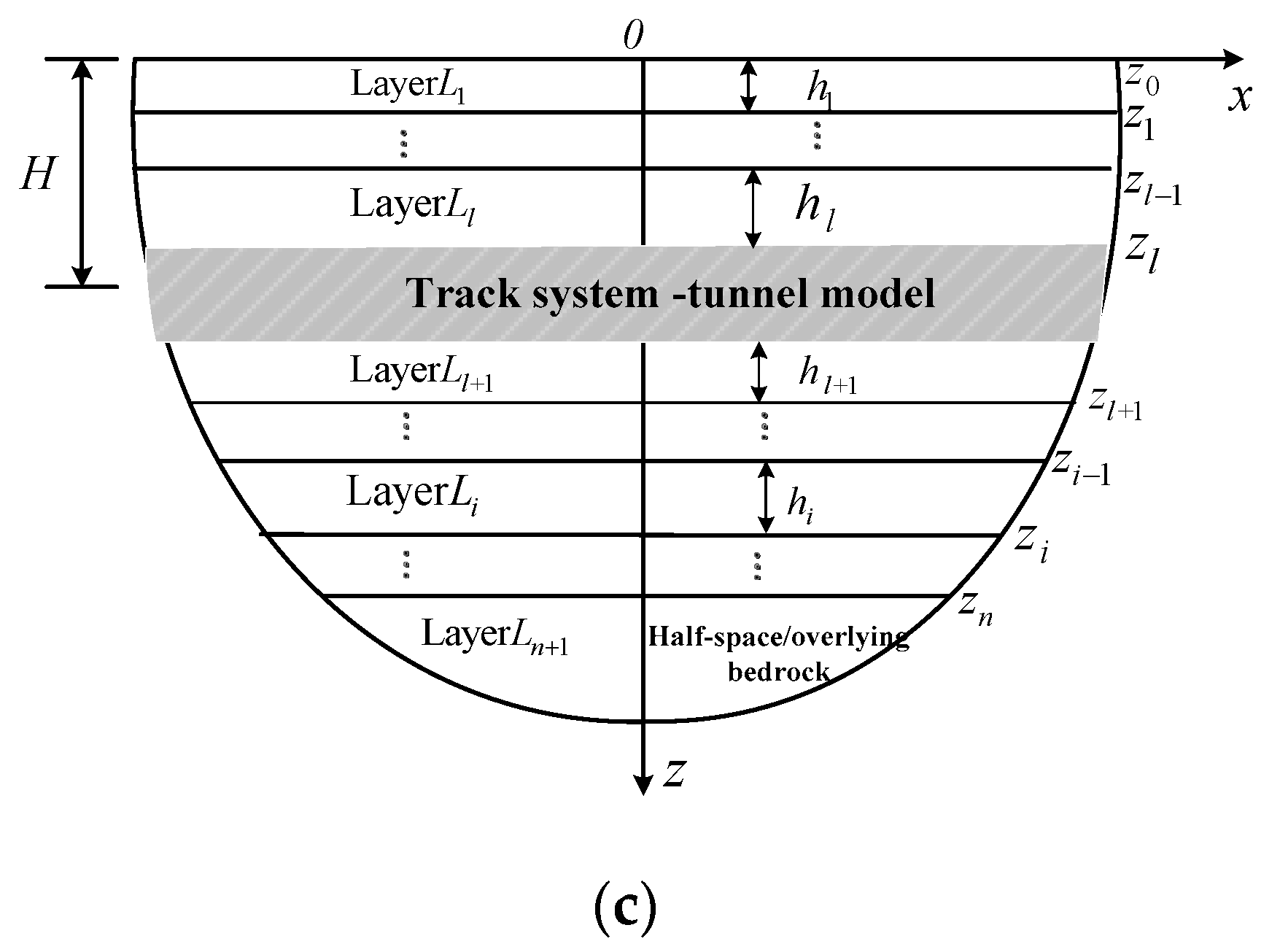
2. Formulation Model of FT/FST System–Tunnel-Layered Saturated Soil
3. Solutions for the FST/FT Track System–Tunnel-Layered Saturated Soil Model
3.1. Dynamic Governing Equations of the Saturated Soil
3.2. Development of the TRM Method
3.3. Coupling of Track System with the Tunnel-Layered Saturated Soil Model
3.3.1. Solutions for the Dynamic Response of the FST System–Tunnel-Layered Saturated Soil Model
3.3.2. Solutions for Dynamic Response of the FT System–Tunnel-Layered Saturated Soil Model
4. Results and Discussion
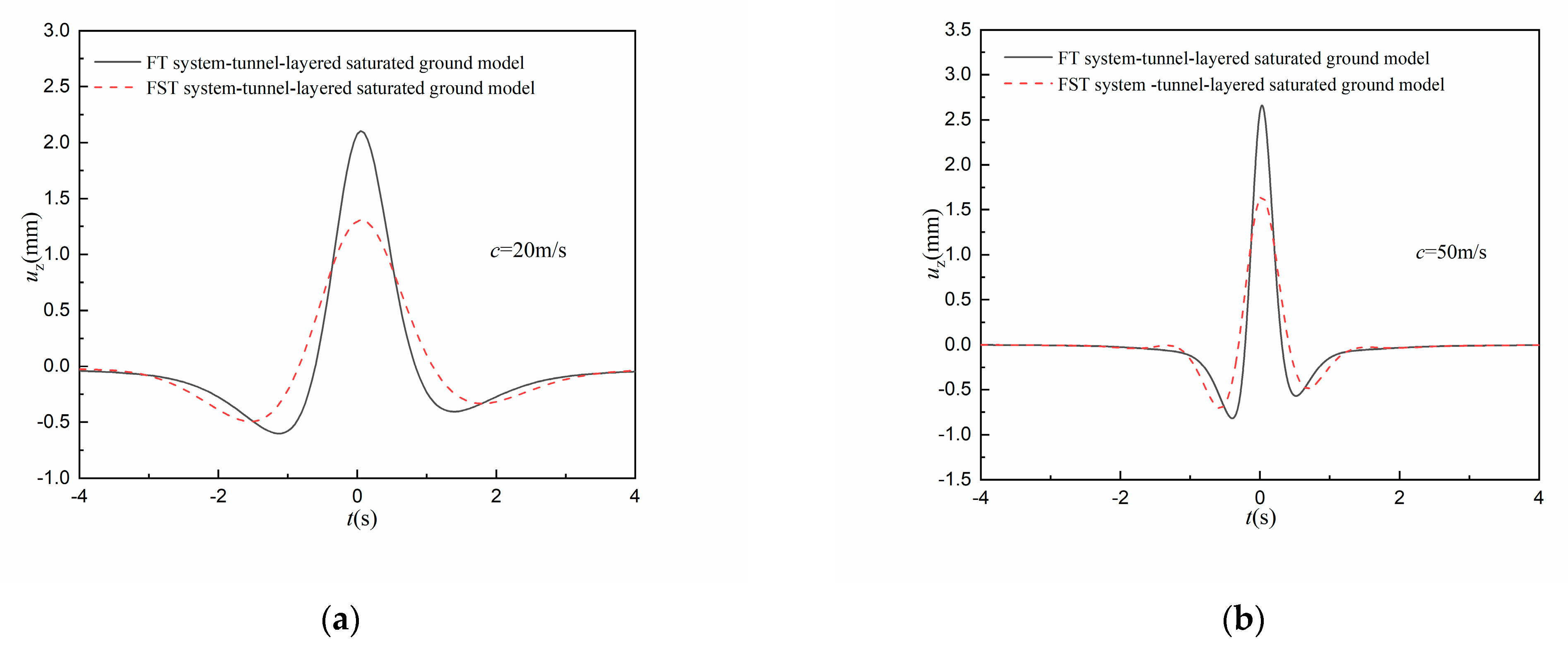
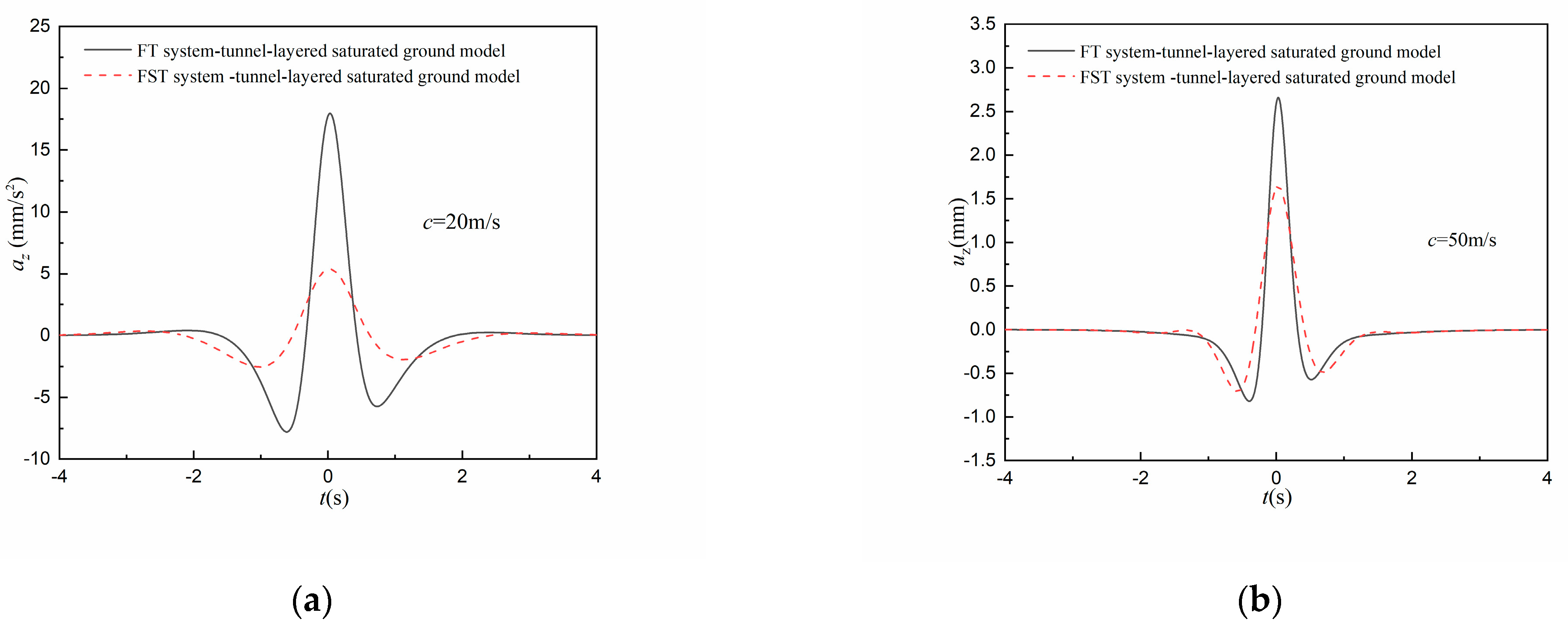
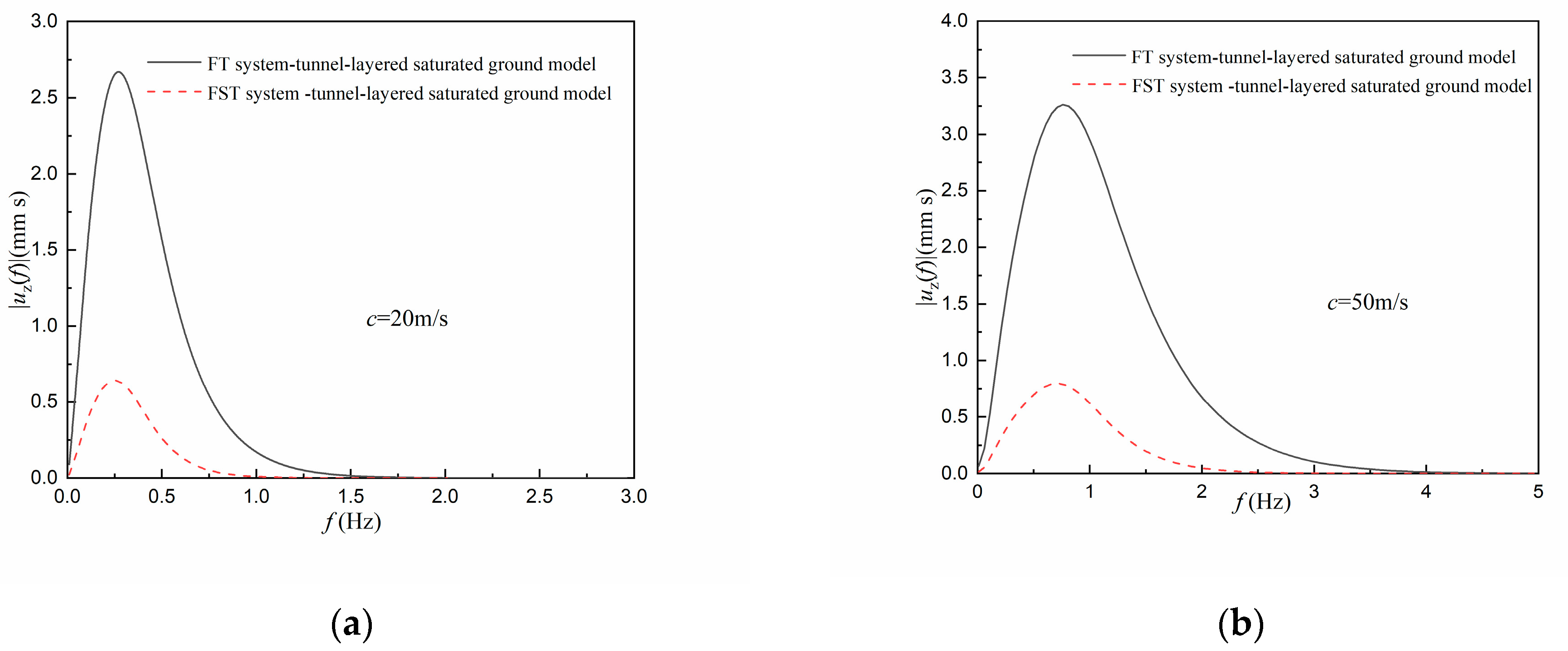
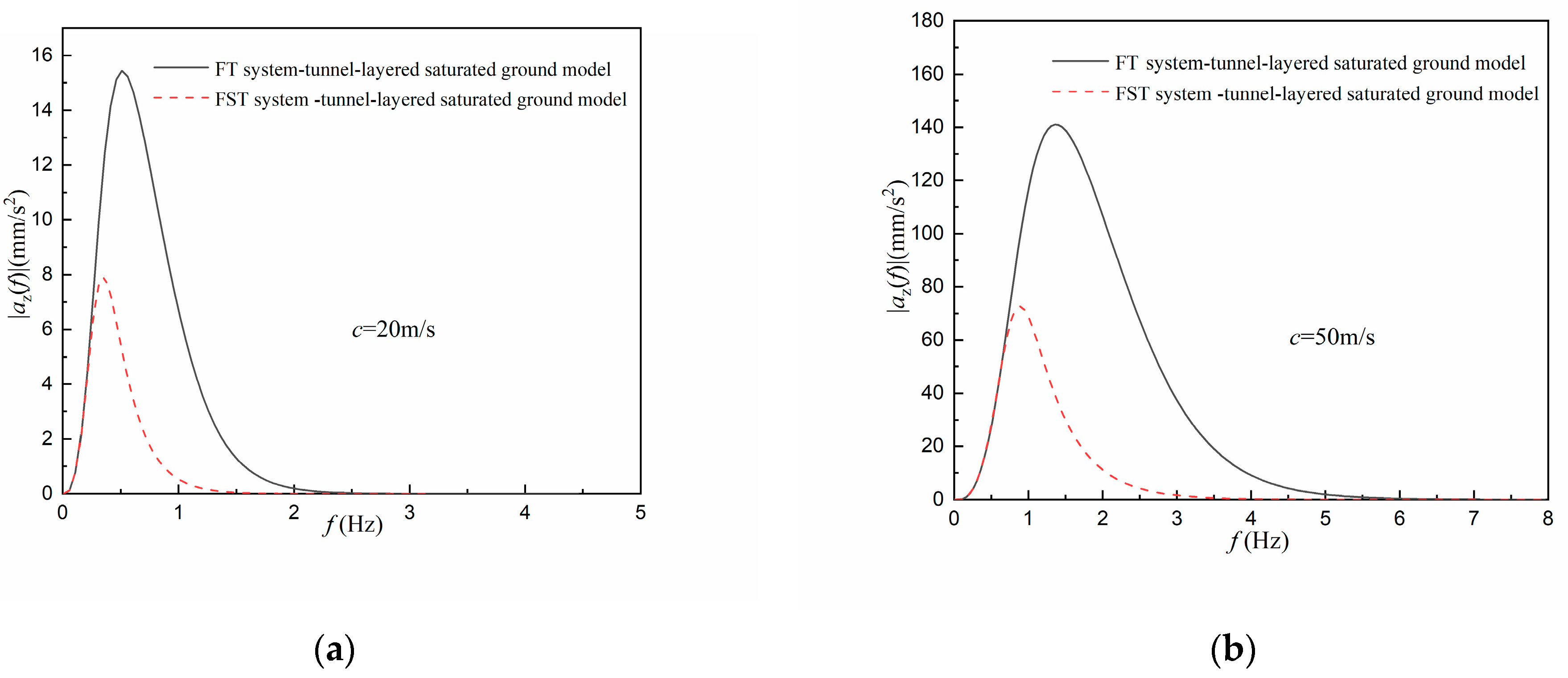
4.1. Surface Vibration under the Constant Moving Load
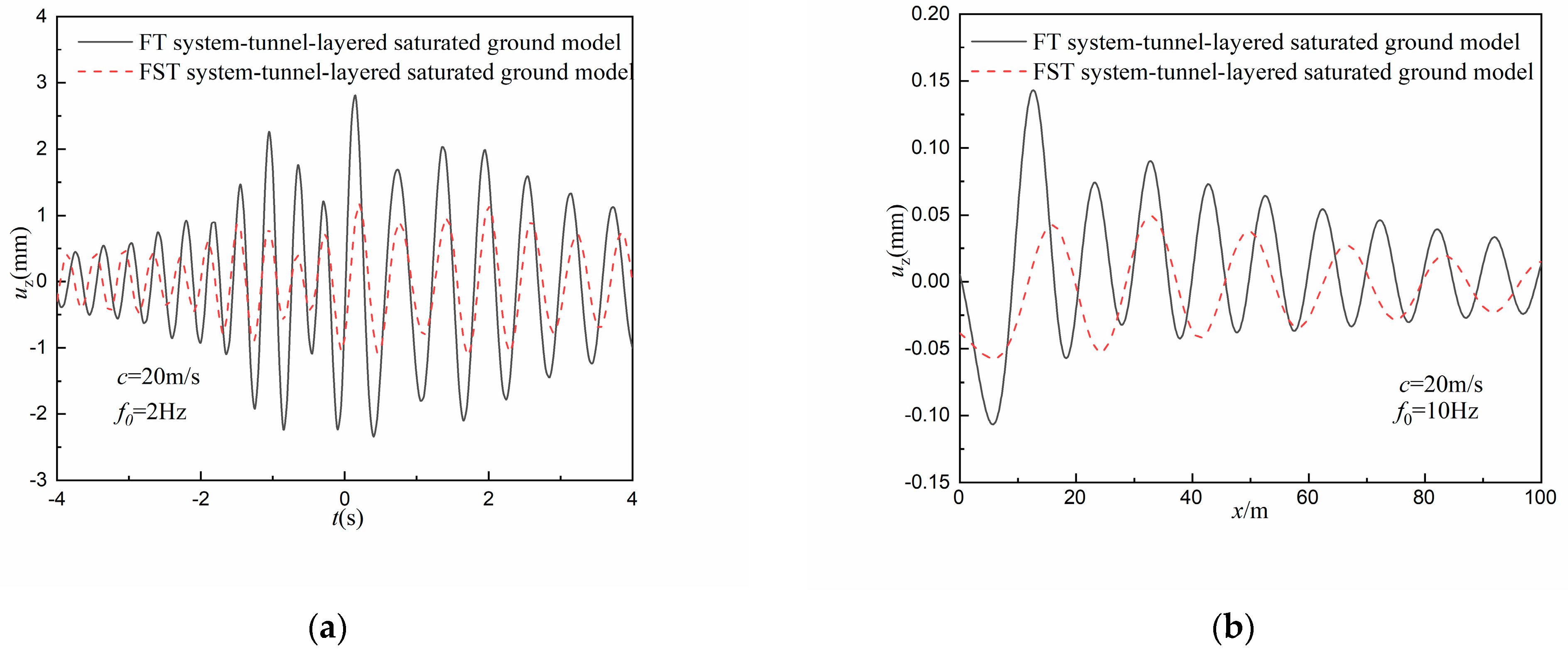
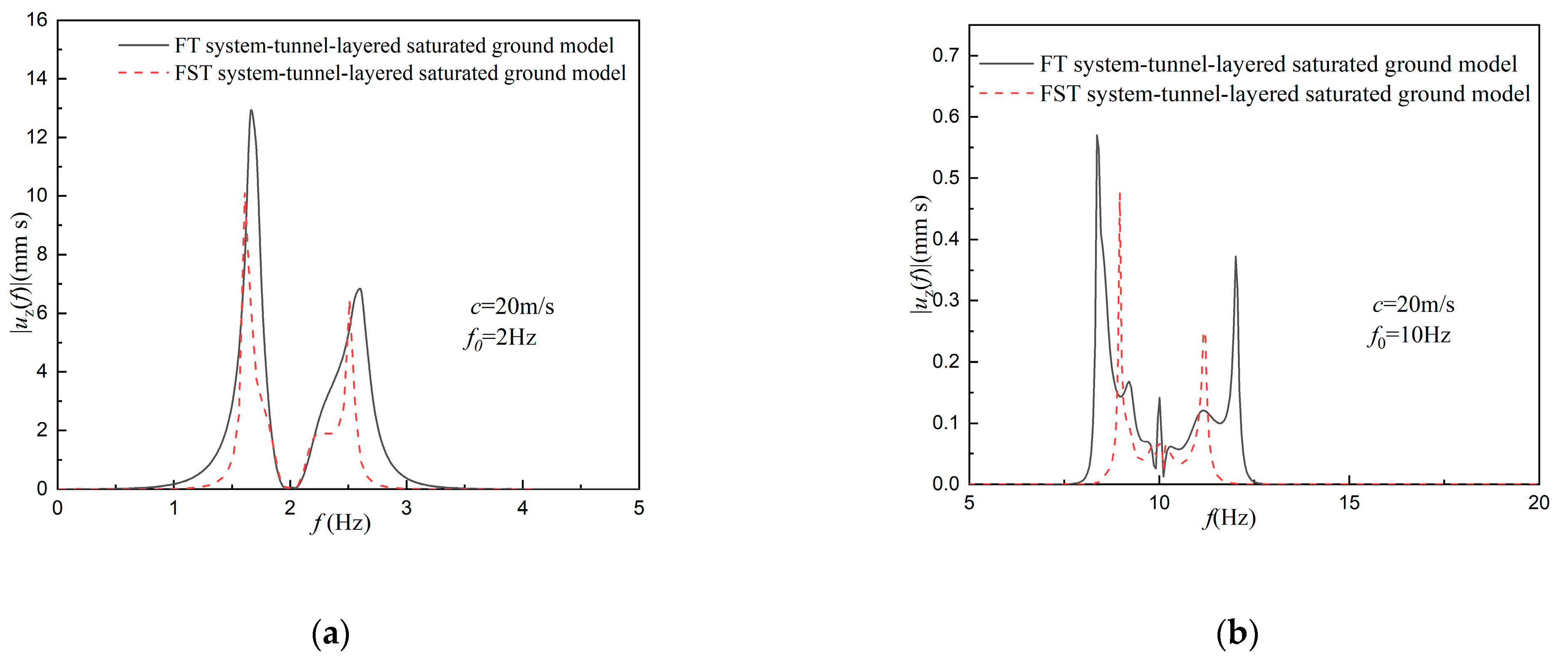
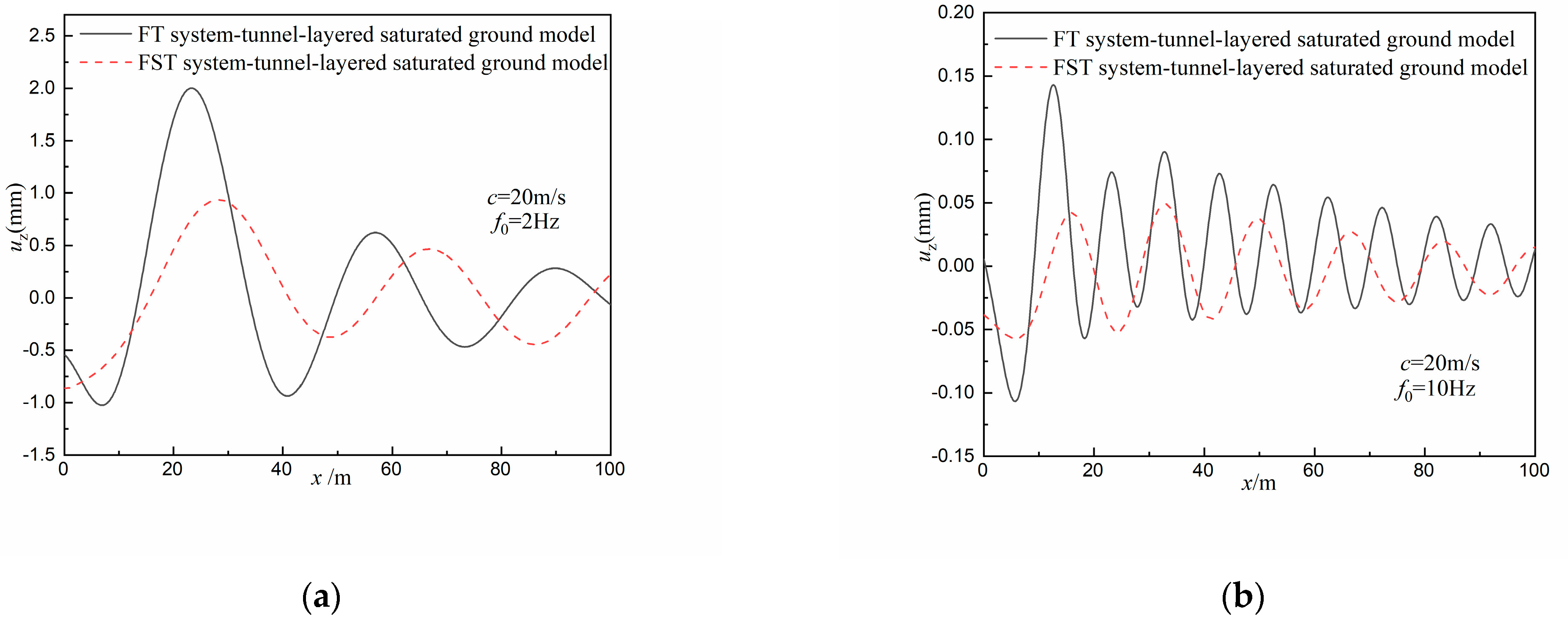
4.2. Surface Vibration under the Harmonic Moving Load
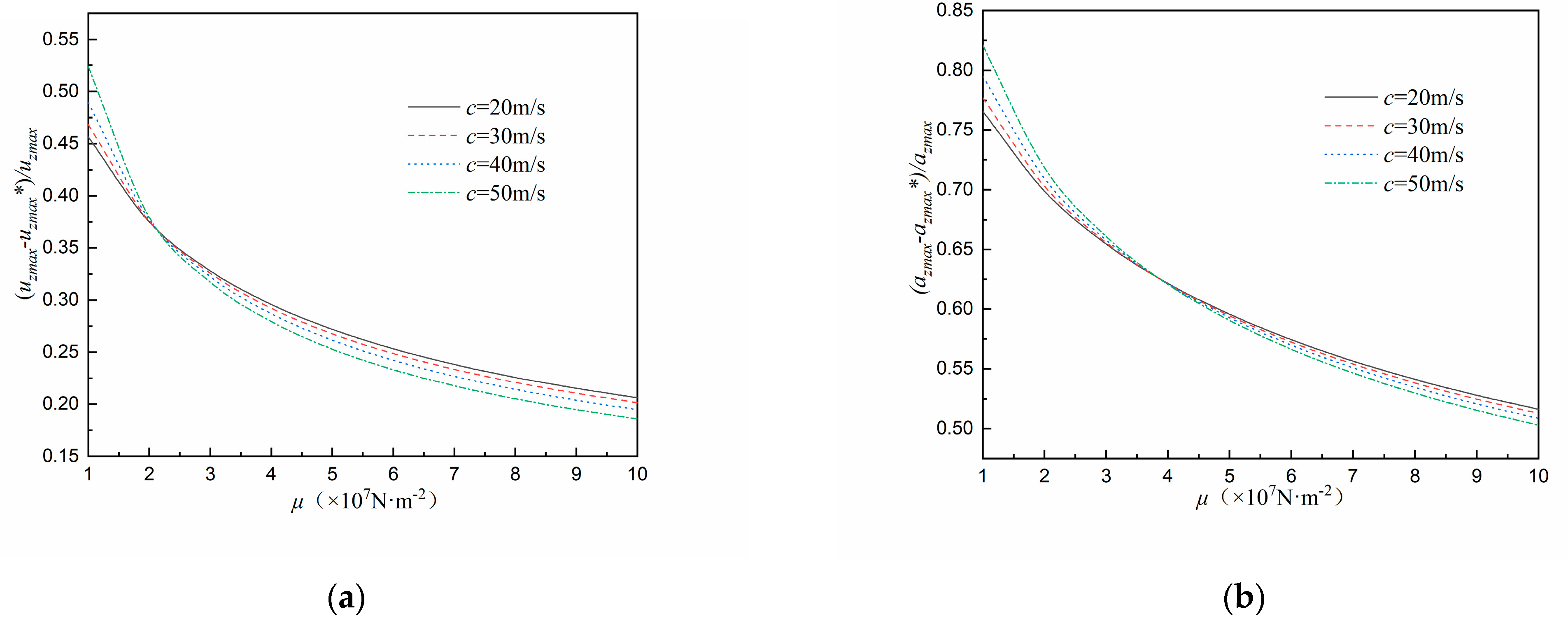
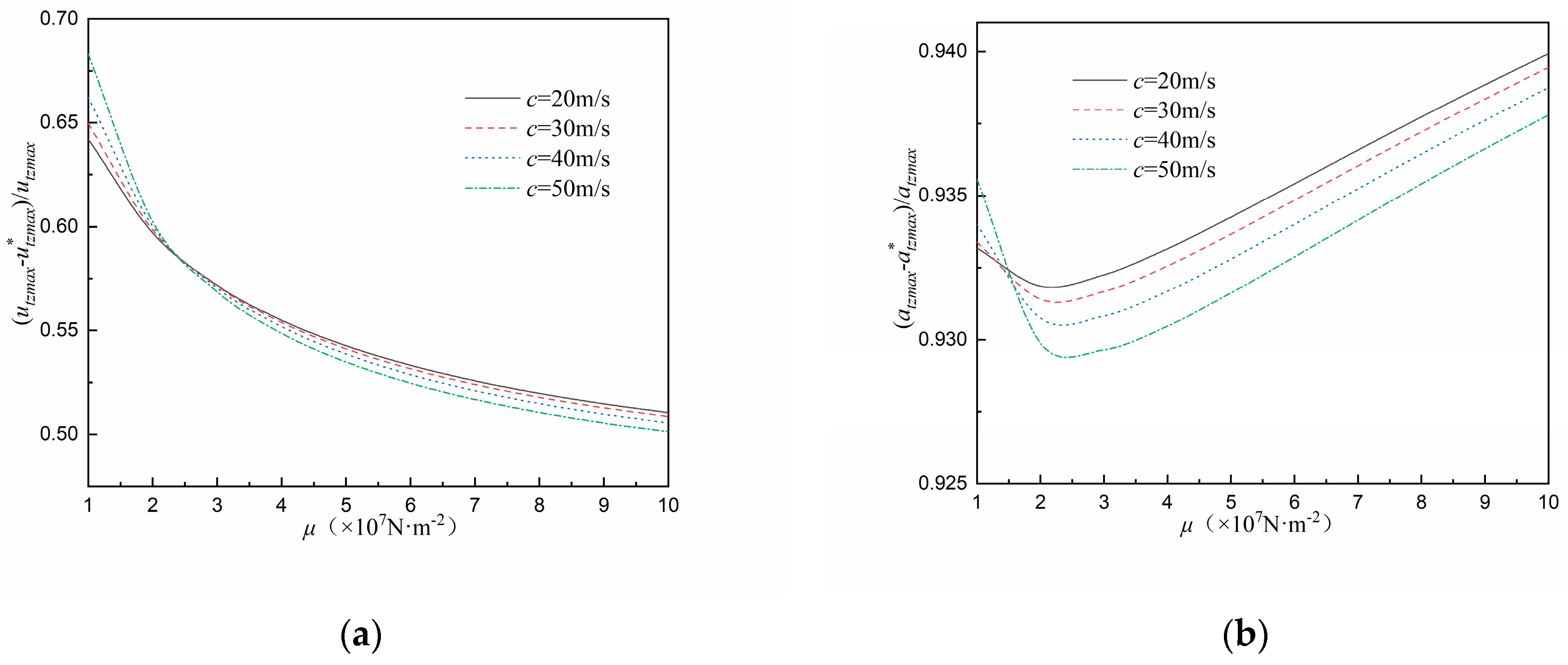
4.3. Effect of Soil Stiffness on Damping Effect of FST System
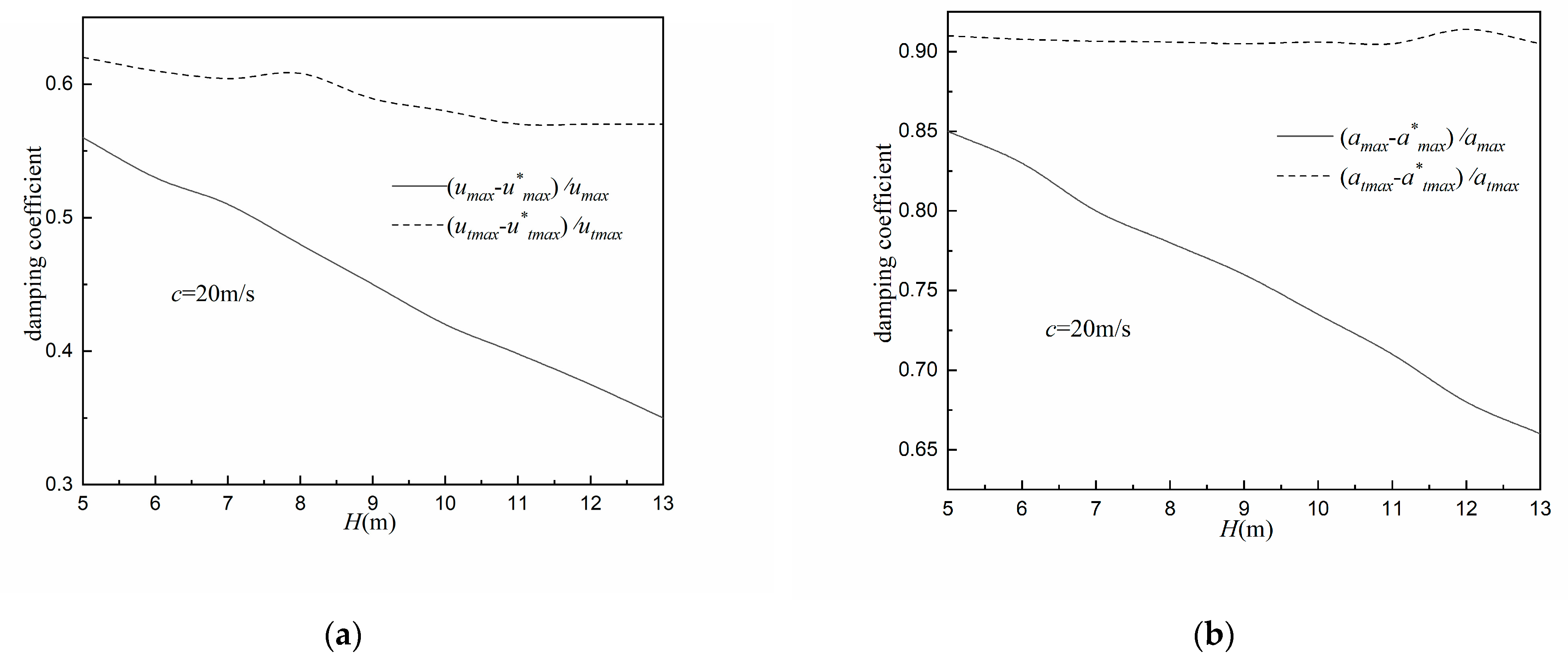
4.4. Effect of Overlaying Soil Layer Thickness on the Damping Effect of FST System
5. Conclusions
- (1)
- Under the constant moving load, the attenuating effect of the FST system on the amplitude of the vibration acceleration is about 30% greater than that on vibration displacement amplitude; the amplitudes of the surface vertical displacement in the whole frequency domain are all attenuated by the FST system, while the attenuation effect of the FST system on the amplitude of the surface vertical acceleration is more obvious in a relatively high-frequency region.
- (2)
- Under the harmonic moving load, the amplitude of the surface vertical displacement is reduced by the FST system, and the higher the moving load frequency, the more violently the ground vibrates. The vibration displacement amplitude is reduced and the range of vibration frequency spectrum is narrowed after the FST system is used.
- (3)
- With the increase in the embedded depth of tunnel and the increase in the soil stiffness, the damping effect of the FST system on ground surface vibration recedes, while the damping effect of the FST system on the tunnel vibration is less affected.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kuo, C.M.; Huang, C.H.; Chen, Y.Y. Vibration characteristics of FST. J. Sound Vib. 2008, 317, 1017–1103. [Google Scholar] [CrossRef]
- Li, R.; Chen, K.; Feng, H.; He, L. Research progress on vibration isolation of FST structure of subway. Mech. Sci. Technol. Aerosp. Eng. 2012, 11, 46–52. [Google Scholar]
- Hussein, M.F.M.; Hunt, H.E.M. Modelling of floating-slab tracks with continuous slabs under oscillating moving loads. J. Sound Vib. 2006, 297, 37–54. [Google Scholar] [CrossRef]
- Cui, F.; Chew, C.H. The effectiveness of FST system—Part I. Receptance methods. Appl. Acoust. 2000, 61, 441–453. [Google Scholar] [CrossRef]
- Liu, X.; Wu, C.; Xie, J.; Huang, X. Theoretical analysis of long FST (part I)—Dispersion graph and critical velocity. Chin. J. Comput. Mech. 2009, 26, 919–923. [Google Scholar]
- Yuan, J.; Zhu, Y.; Wu, M. Vibration characteristics and effectiveness of floating slab track system. J. Comput. 2009, 4, 1249–1254. [Google Scholar] [CrossRef]
- Li, L.-F.; Ma, M.; Liu, W.-N.; Du, L.-L. Analysis for the vibration reduction characteristics of steel spring floating slab tracks under different types of excitation. Eng. Mech. 2018, 35, 253–255. [Google Scholar]
- Zhang, S.-Y. Vibration Analysis of Rail Vehicles on Floating Slab Track and Monolithic bed track. Railw. Stand. Des. 2016, 60, 10–13. [Google Scholar]
- Liang, R.-H.; Ma, M.; Liu, W.F.; Du, L.L.; Li, L.F. Evaluation of vibration mitigation effect of vibration isolated track considering stratum dynamic characteristics difference. Eng. Mech. 2020, 37, 75–81. [Google Scholar]
- Zhou, S.H.; He, C.; Guo, P.; Di, H.; Xiao, J. Three-Dimensional Analytical Model for Coupled Track-Tunnel-Soil System in a Multilayered Half-Space. J. Eng. Mech. 2020, 146, 4019121. [Google Scholar] [CrossRef]
- Qiang, H.; Liu, G.; Feng, Q.; Huang, H. Dynamic responses of track-tunnel-ground model induced by moving load. J. Vib. Meas. Diagn. 2020, 40, 8. [Google Scholar]
- Forrest, J.A.; Hunt, H.E.M. A three-dimensional tunnel model for calculation of train-induced ground vibration. J. Sound Vib. 2006, 294, 678–705. [Google Scholar] [CrossRef]
- Hussein, M.F.M.; Hunt, H.E.M. A numerical model for calculating vibration from a railway tunnel embedded in a full-space. J. Sound Vib. 2007, 305, 401–431. [Google Scholar] [CrossRef]
- Bian, X.C.; Jin, W.F.; Jiang, H.G. Ground-borne vibrations due to dynamic loadings from moving trains in subway tunnels. J. Zhejiang Univ. Sci. A Appl. Phys. Eng. 2012, 13, 870–876. [Google Scholar] [CrossRef]
- Wei, K.; Zhai, W.; Xiao, J. Influence of track regularity and soil dynamic characteristics on vibration of subway tunnel. J. Southwest Jiaotong Univ. 2013, 48, 989–995. [Google Scholar]
- Li, J. Analysis of Effect of the FST on Environmental Vibration. Ph.D. Thesis, Southwest Jiaotong University, Nanjing, China, 2011. [Google Scholar]
- Zhou, B.; Xie, X.Y.; Yang, Y.B. Simulation of wave propagation of FST-tunnel-soil system by 2d theoretical model. Int. J. Struct. Stab. Dy. 2013, 14, 1350051-1–1350051-24. [Google Scholar] [CrossRef]
- Wu, Z.Z.; Liu, W.N.; Ma, L.X.; Wang, W. Frequency domain analytical method for predicting metro environmental vibration based on soil frequency response function. China Railw. Sci. 2014, 35, 105–112. [Google Scholar]
- Hung, H.H.; Chen, G.H.; Yang, Y.B. Effect of railway roughness on soil vibrations due to moving trains by 2.5D finite/infinite element approach. Eng. Struct. 2013, 57, 254–266. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of propagation of elastic waves in a fluid-saturated porous solid. Part I: Low-frequency range. J. Acoust. Soc. Am. 1956, 28, 168–178. [Google Scholar] [CrossRef]
- Cai, Y.; Sun, H.; Xu, C. Steady state responses of poroelastic half-space soil medium to a moving rectangular load. Int. J. Solids Struct. 2007, 44, 7183–7196. [Google Scholar] [CrossRef]
- Yuan, Z.H.; Cao, Z.G.; Boström, A.; Cai, Y.Q. The influence of pore-fluid in the soil on ground vibrations from a tunnel embedded in a layered half-space. J. Sound Vib. 2018, 419, 227–248. [Google Scholar] [CrossRef]
- Yuan, Z.-H.; Cai, Y.-Q.; Shi, L.; Sun, H. Response of rail structure and underground tunnel in the saturated soil subjected to a harmonic moving load. Chin. J. Geotech. Eng. 2016, 38, 311–322. [Google Scholar]
- Zeng, C. Dynamic Response of Lined Tunnel and Track System in Poroelastic Soil under Subway Load. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2014. [Google Scholar]
- Yuan, Z.H.; Cai, Y.Q.; Zeng, C. Dynamic response analysis of track system and underground railway tunnel in saturated soil subjected to a moving train load. Chin. J. Rock Mech. Eng. 2015, 34, 1470–1479. [Google Scholar]
- Di, H.G.; Zhou, S.H.; Luo, Z.; He, C. A vehicle-track-tunnel-soil model for evaluating the dynamic response of a double-line metro tunnel in a poroelastic half-space. Comput. Geotech. 2018, 101, 245–263. [Google Scholar] [CrossRef]
- He, C.; Zhou, S.H.; Guo, P.J. Train-Induced Vibrations from a Tunnel in a Layered Half-Space with Varied Groundwater Table. Int. J. Geomech. 2020, 20, 4020174. [Google Scholar] [CrossRef]
- Luco, J.E.; Apsel, R.J. On the Green’s functions for a layered half-space. Part I. Bull. Seismol. Soc. Am. 1983, 73, 909–929. [Google Scholar]
- Apsel, R.J.; Luco, J.E. On the Green’s functions for a layered half-space. Part II. Bull. Seismol. Soc. Am. 1983, 73, 931–951. [Google Scholar] [CrossRef]
- De Barros, F.C.P.; Luco, J.E. Response of a layered viscoelastic half-space to a moving point load. Wave Motion 1994, 19, 189–210. [Google Scholar] [CrossRef]
- Lu, J.F.; Hanyga, A. Fundamental solution for a layered porous half space subject to a vertical point force or a point fluid source. Comput. Mech. 2005, 35, 376–391. [Google Scholar] [CrossRef]
- Hu, A.F.; Li, Y.; Fu, P.; Sun, B. Dynamic response of the layered saturated foundation-beam coupled system subjected to a buried moving load. J. Vib. Eng. 2018, 31, 140–147. [Google Scholar]
- Biot, M.A. Mechanics of deformation and acoustic propagation in porous media. J. Appl. Phys. 1962, 33, 1482–1498. [Google Scholar] [CrossRef]
- Yuan, Z.H.; Xu, C.J.; Cai, Y.Q.; Cao, Z. Dynamic response of a tunnel buried in a saturated poroelastic soil layer to a moving point load. Soil Dyn. Earthq. Eng. 2015, 77, 348–359. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Saturated soil | Lamé constant | N⋅m−2 | Lamé constant | |
| Porosity | Density | |||
| Biot’s constant | Biot’s constant | |||
| Internal viscous constant | ||||
| Tunnel |
| Railway Structure | Slab Track Structure | ||
|---|---|---|---|
| Bending stiffness | Bending stiffness | ||
| Mass per unit length | Mass per unit length | ||
| Stiffness coefficient | Stiffness coefficient | ||
| Damping coefficient | Damping coefficient | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.-J.; Hu, A.-F.; Li, C.; Zhang, R.-T.; Ma, Y.-X.; Xu, H. Investigation on the Damping Effect of FST System under Moving Load Using the Track–Tunnel-Layered Saturated Ground Model. Sustainability 2023, 15, 15495. https://doi.org/10.3390/su152115495
Li Y-J, Hu A-F, Li C, Zhang R-T, Ma Y-X, Xu H. Investigation on the Damping Effect of FST System under Moving Load Using the Track–Tunnel-Layered Saturated Ground Model. Sustainability. 2023; 15(21):15495. https://doi.org/10.3390/su152115495
Chicago/Turabian StyleLi, Yi-Jun, An-Feng Hu, Cong Li, Rong-Tang Zhang, Yu-Xi Ma, and Hao Xu. 2023. "Investigation on the Damping Effect of FST System under Moving Load Using the Track–Tunnel-Layered Saturated Ground Model" Sustainability 15, no. 21: 15495. https://doi.org/10.3390/su152115495
APA StyleLi, Y.-J., Hu, A.-F., Li, C., Zhang, R.-T., Ma, Y.-X., & Xu, H. (2023). Investigation on the Damping Effect of FST System under Moving Load Using the Track–Tunnel-Layered Saturated Ground Model. Sustainability, 15(21), 15495. https://doi.org/10.3390/su152115495