
A Review of the Various Control Algorithms for Trajectory Control of Unmanned Underwater Vehicles

 , , , ,
, , , , 
Abstract
:
1. Introduction
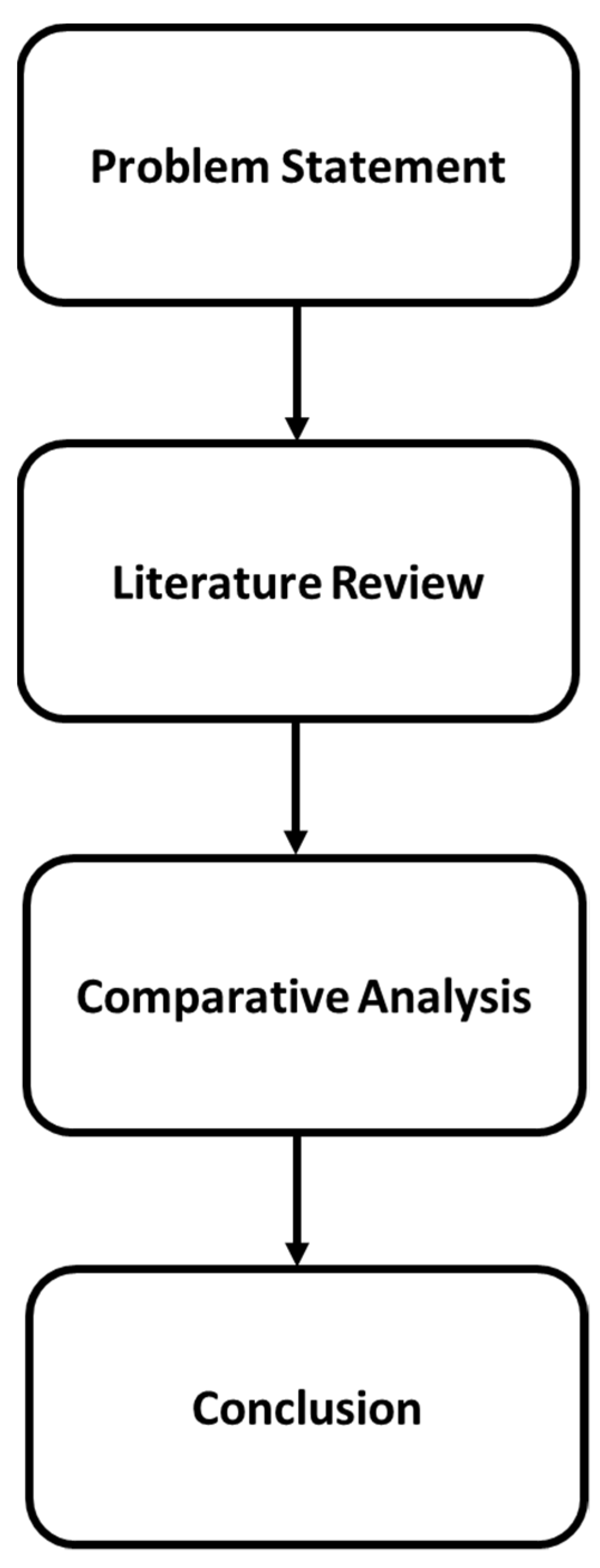
2. Methodology
3. UUV Control System and Control Algorithms
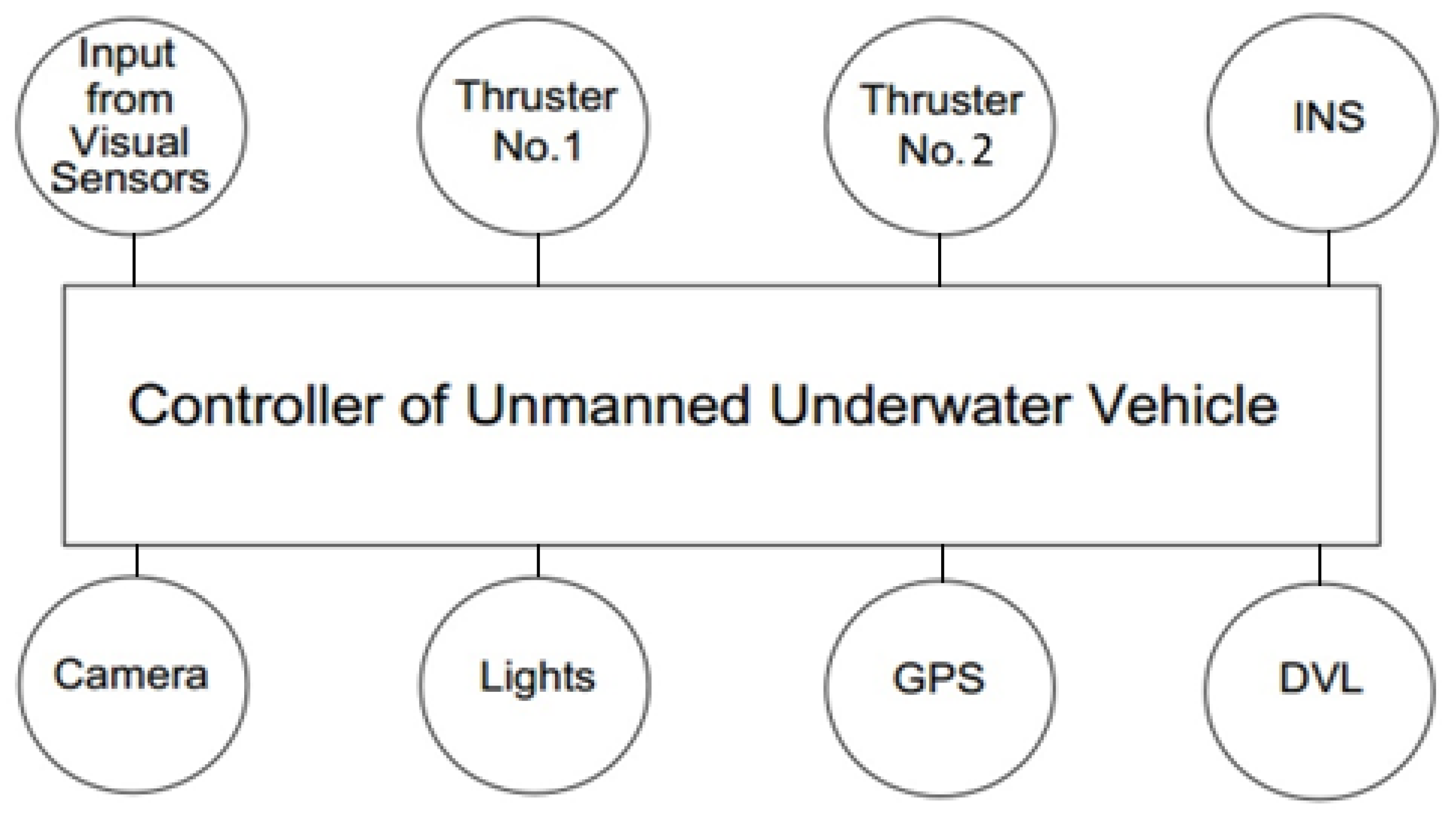
3.1. UUV Control System Design
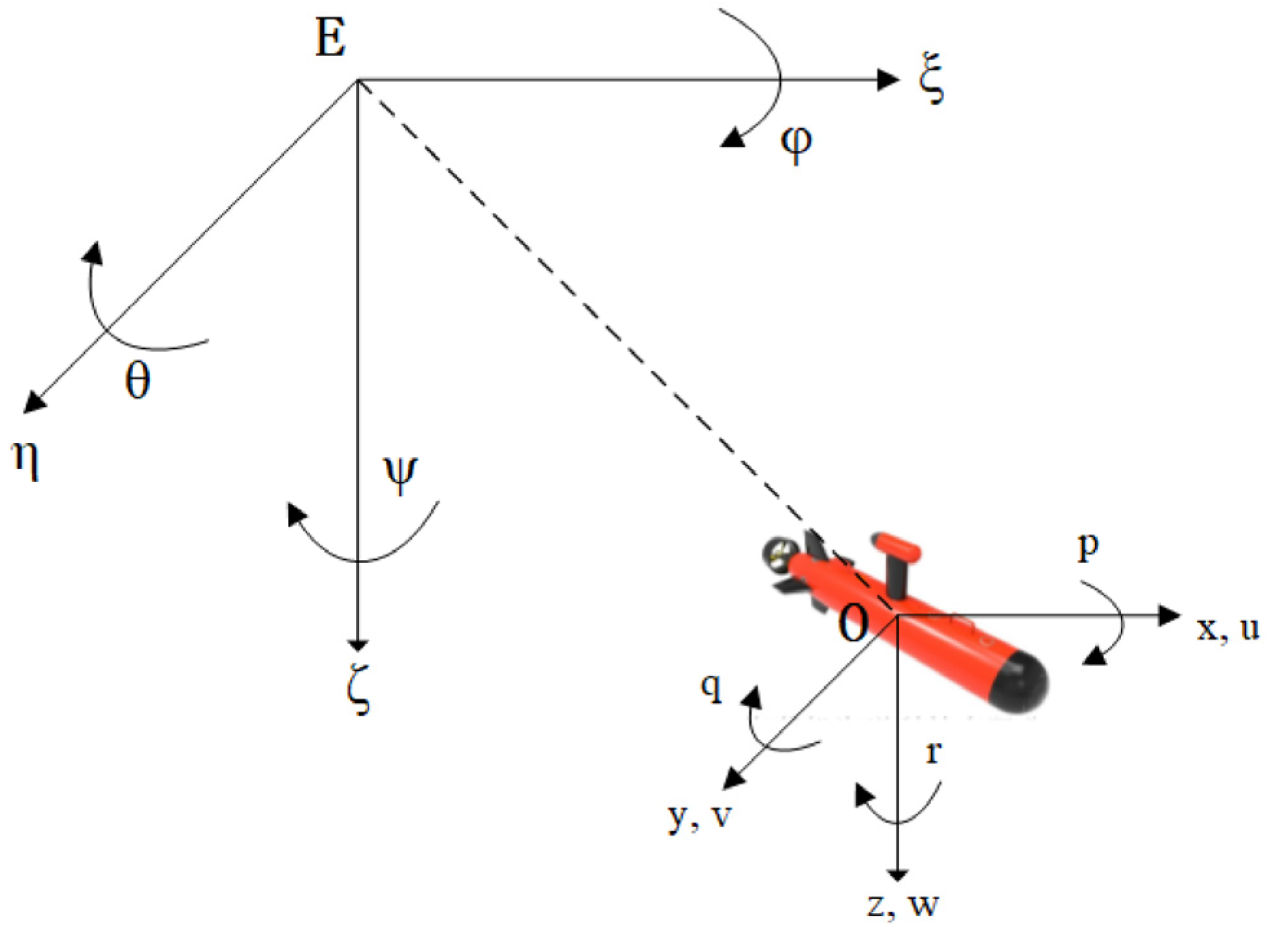
3.2. Governing Equations
- a.
- Ground Coordinate System (E-ξηζ);
- b.
- Vehicle Coordinate System (O-xyz).
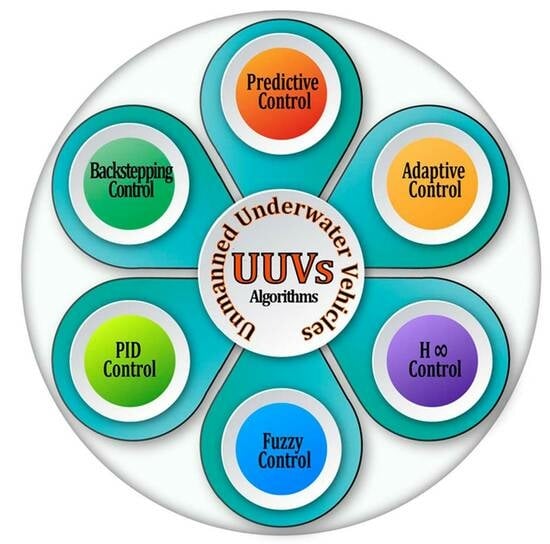
3.3. UUV Control Algorithms
3.3.1. Model Predictive Control (MPC) Algorithm
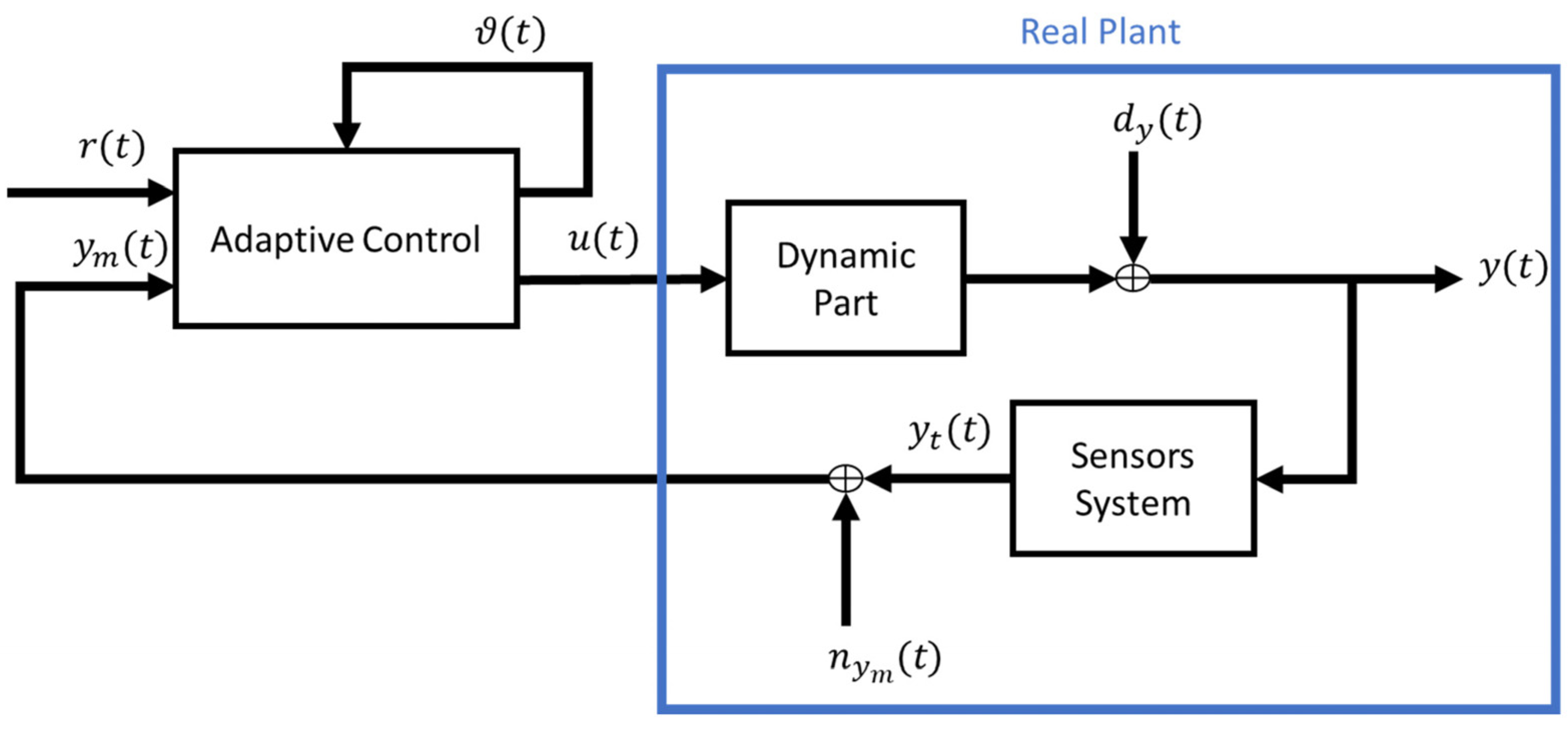
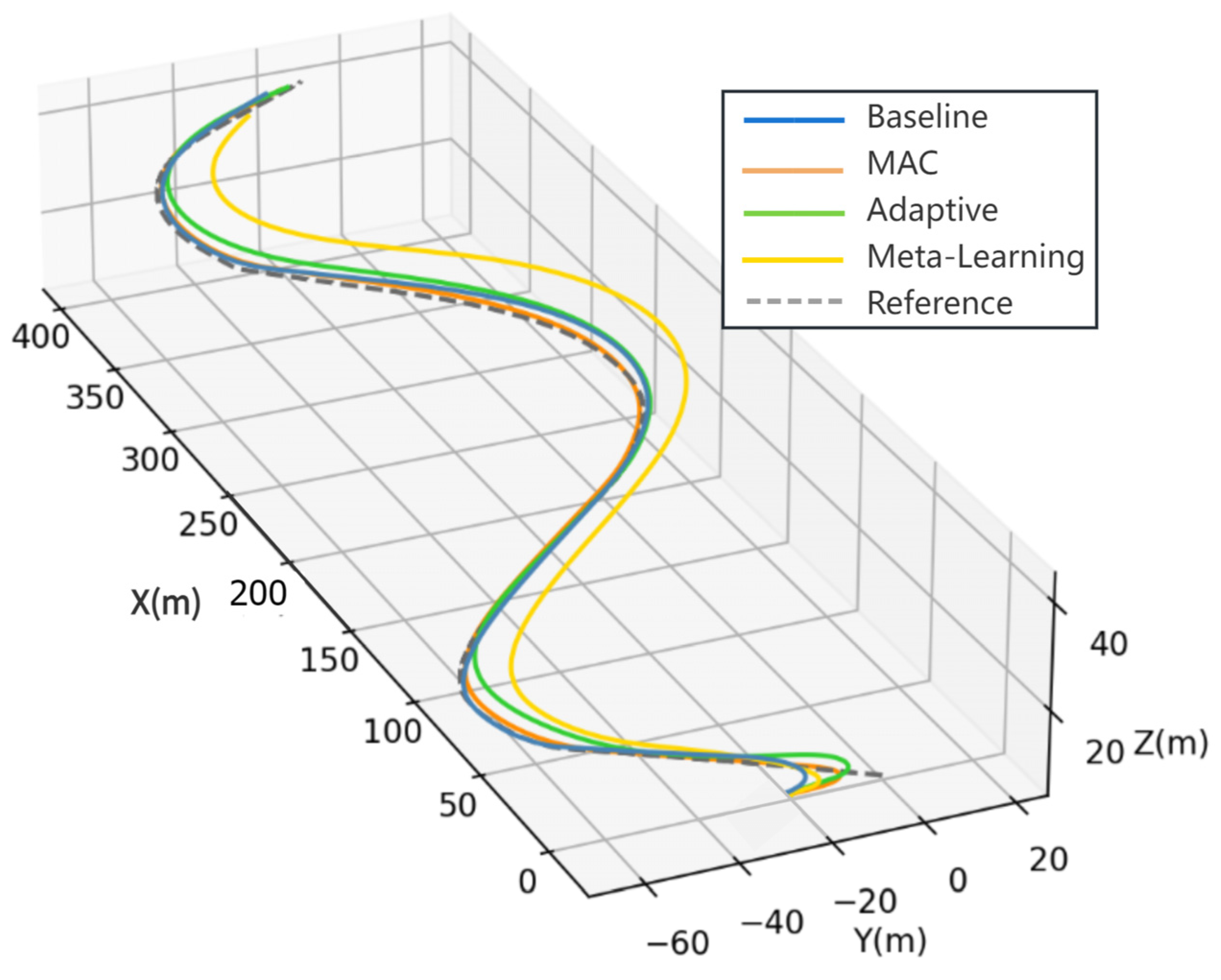
3.3.2. Adaptive Control Algorithm
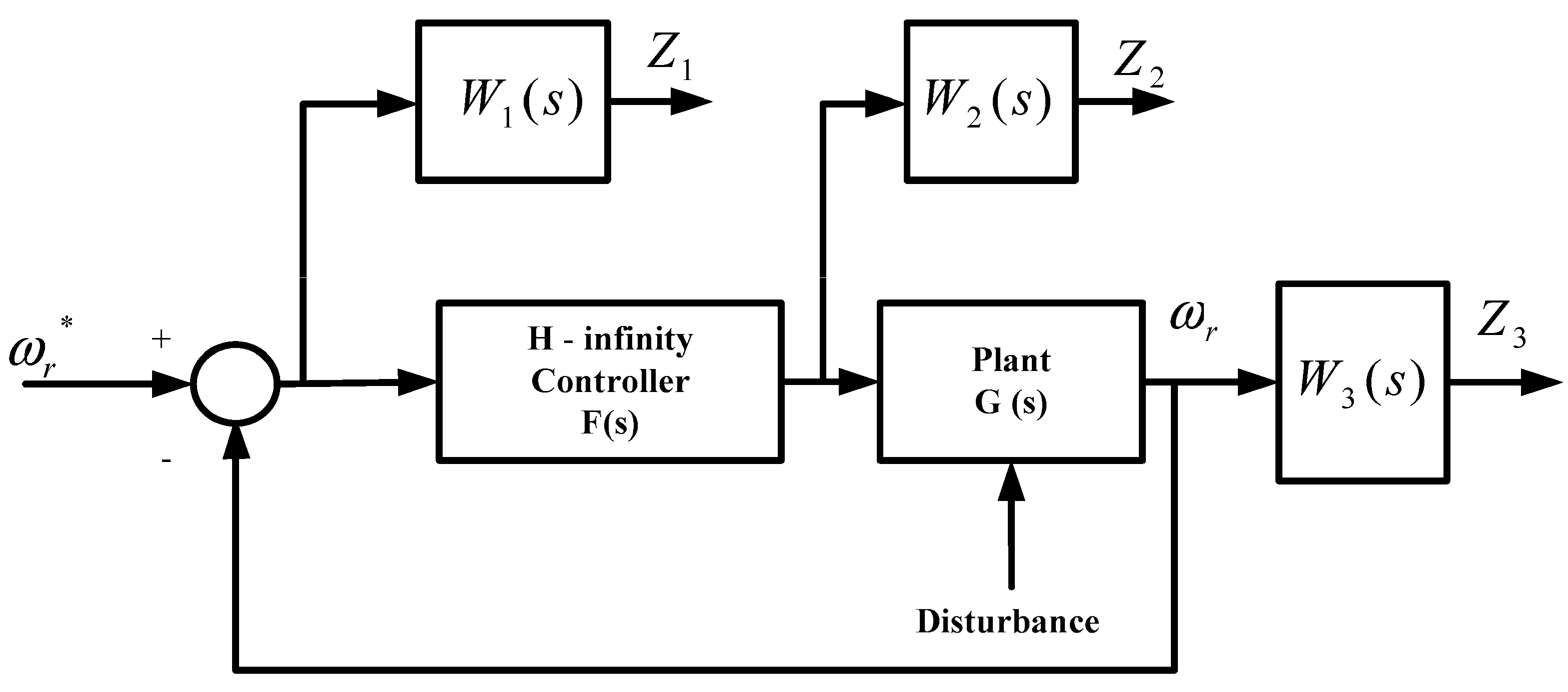
3.3.3. H∞ Control Algorithm
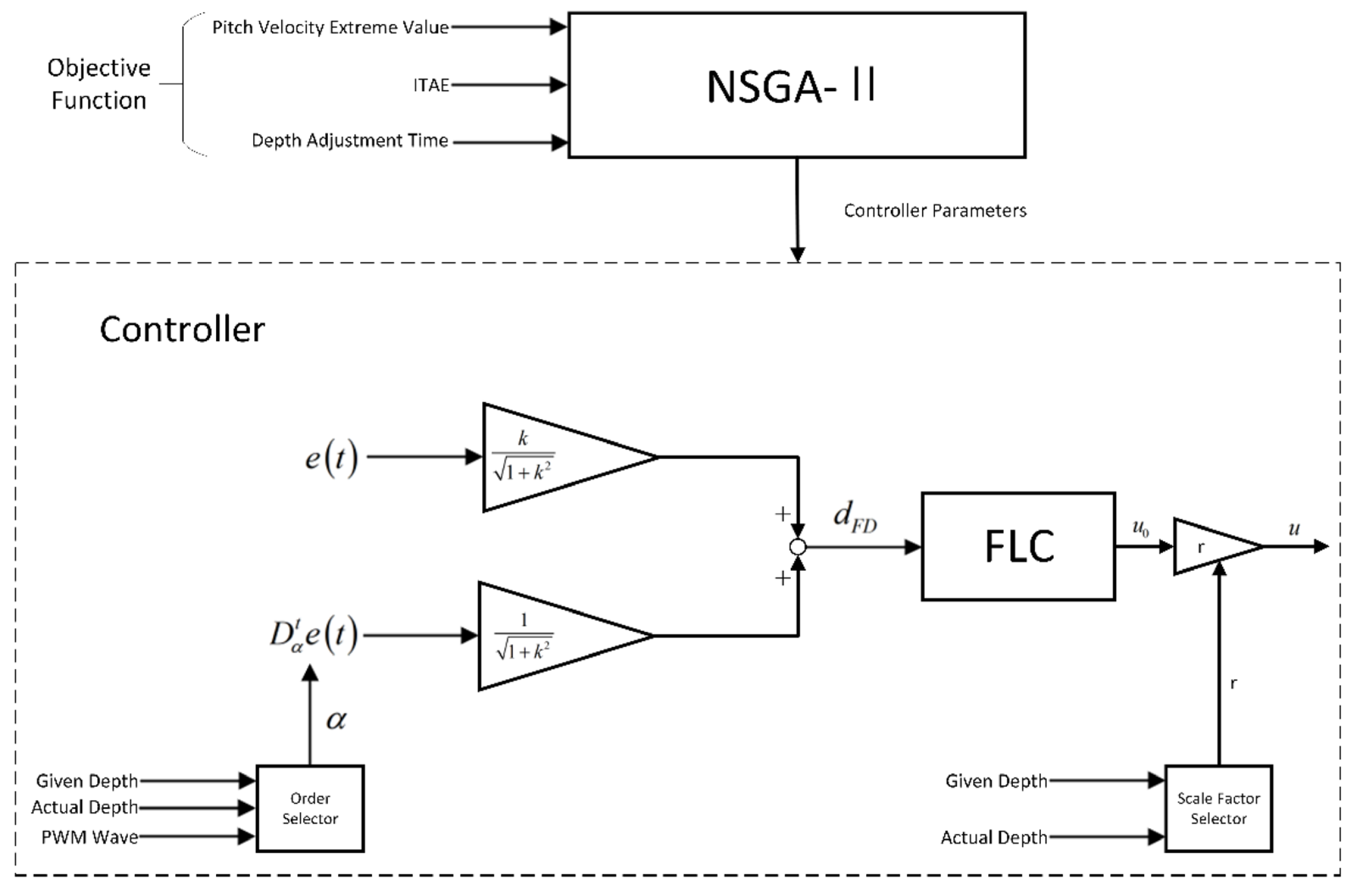
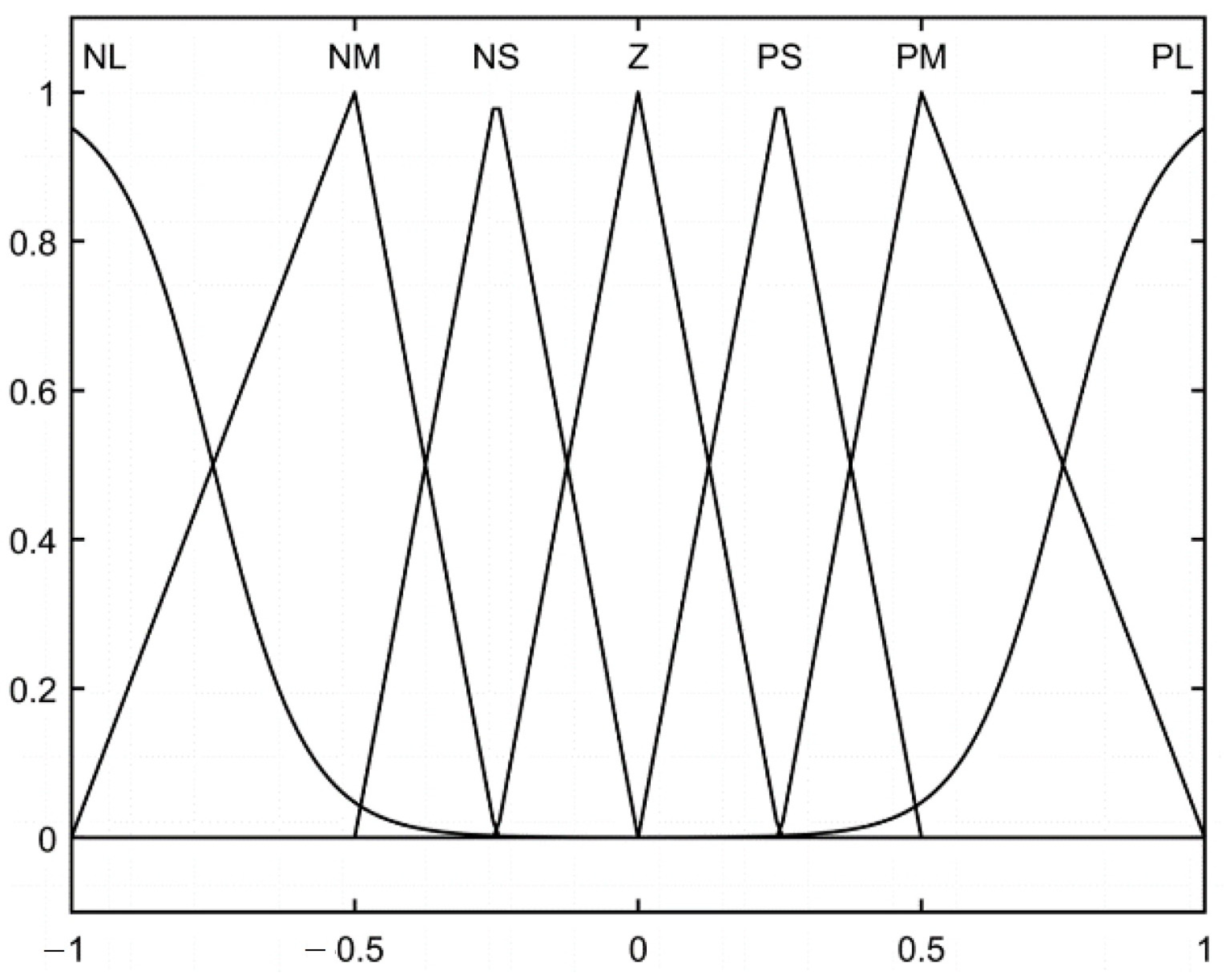
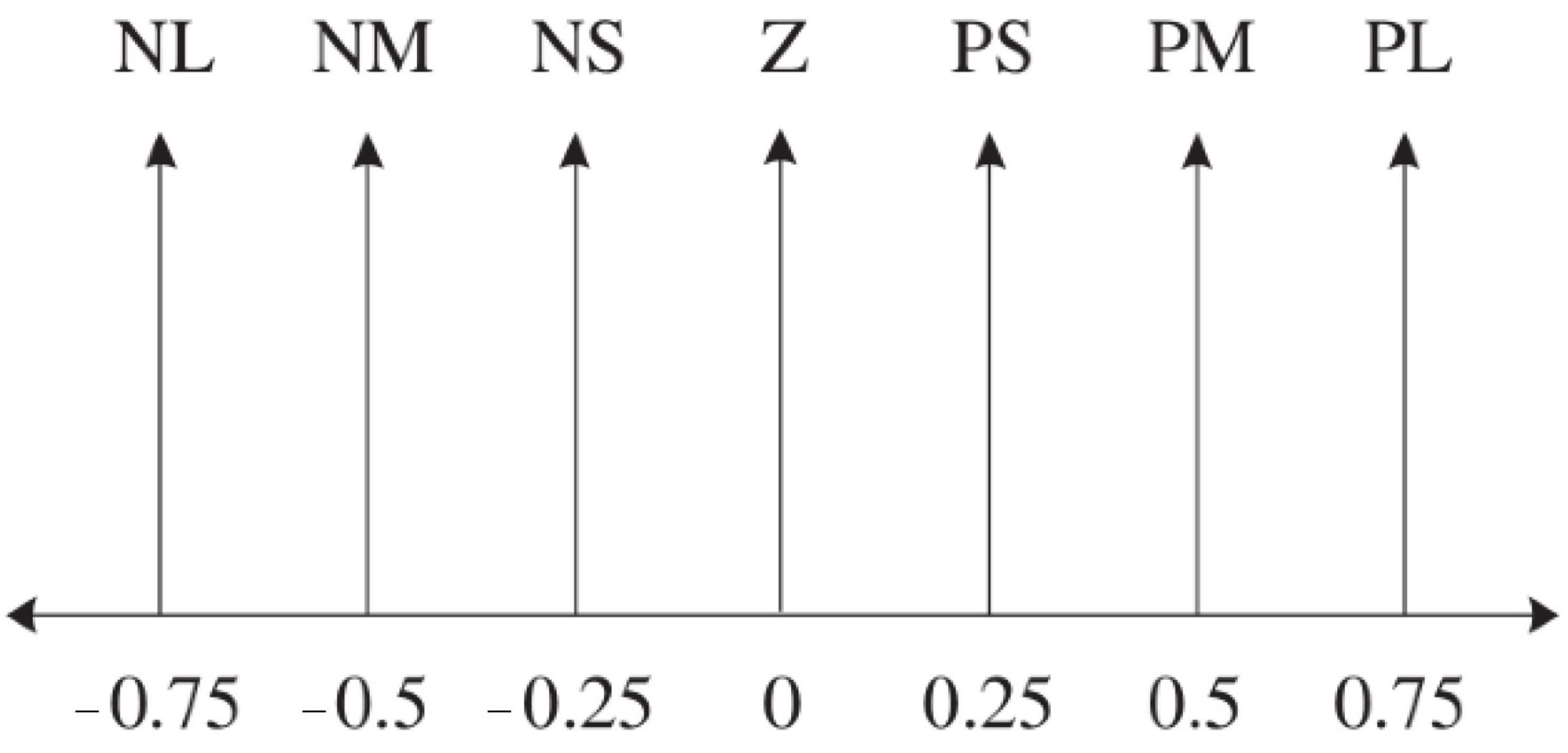
3.3.4. Fuzzy Control Algorithm
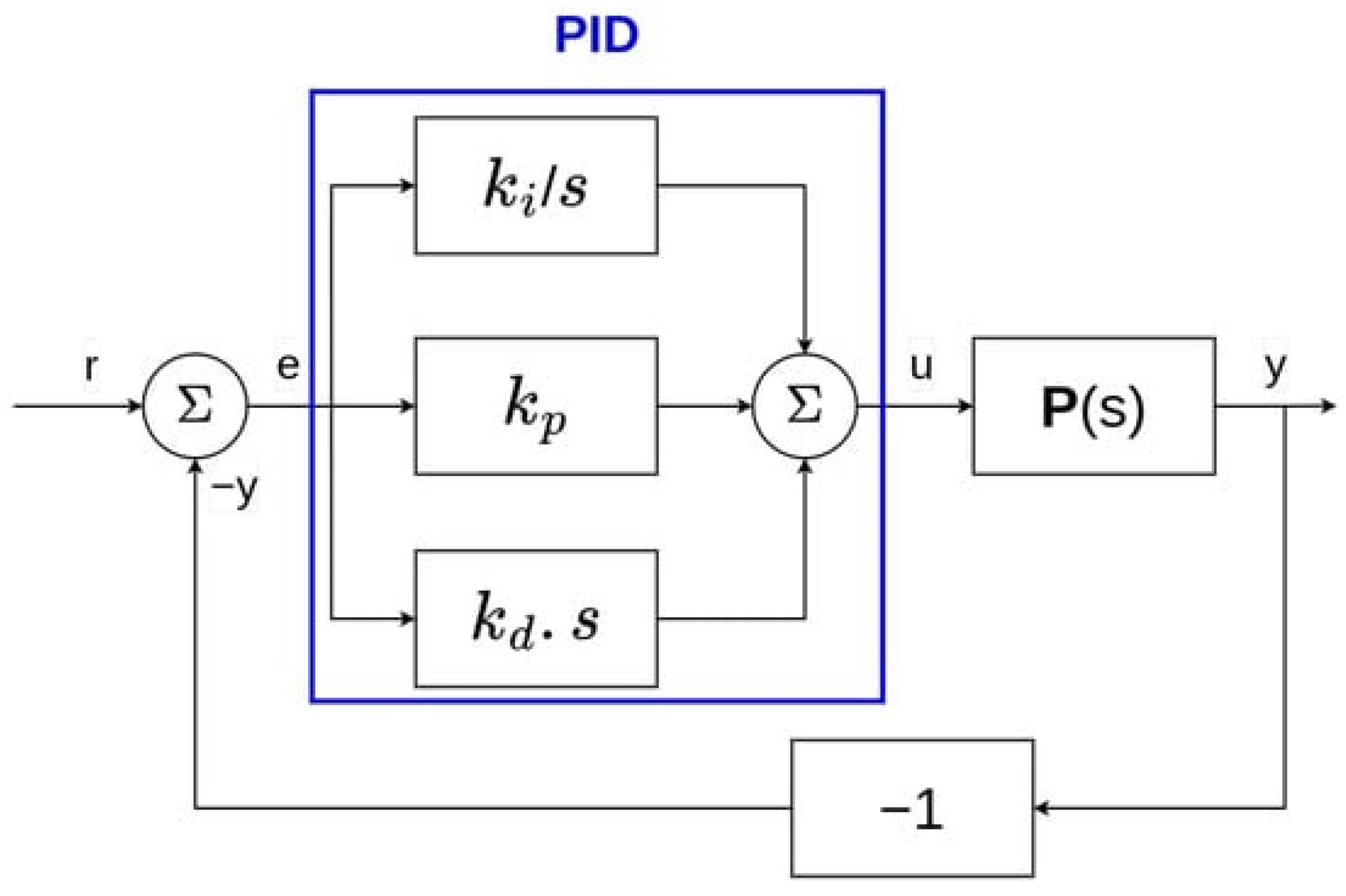
3.3.5. PID Control Algorithm
3.3.6. Backstepping Control Algorithm
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deepwater and Ultra Deepwater. Available online: https://www.enhanced-drilling.com/deepwater-and-ultradeepwater-drilling (accessed on 30 July 2022).
- Javaid, M.Y.; Ovinis, M.; Nagarajan, T.; Hashim, F.B.M. Underwater Gliders: A Review. MATEC Web Conf. 2014, 13, 02020. [Google Scholar] [CrossRef]
- Siregar, S.; Trilaksono, B.R.; Hidayat, E.M.I.; Kartidjo, M.; Habibullah, N.; Zulkarnain, M.F.; Setiawan, H.N. Design and construction of hybrid autonomous underwater glider for underwater research. Robotics 2023, 12, 8. [Google Scholar]
- Du, X.; Hu, X.; Hu, J.; Sun, Z. An adaptive interactive multi-model navigation method based on UUV. Ocean Eng. 2023, 267, 113217. [Google Scholar] [CrossRef]
- Kim, T.W.; Marani, G.; Yuh, J. Underwater vehicle manipulators. In Springer Handbook of Ocean Engineering; Dhanak, M.R., Xiros, N.I., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 407–422. ISBN 978-3-319-16648-3. [Google Scholar]
- Sivcev, S.; Coleman, J.; Omerdic, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean Eng. 2018, 163, 431–450. [Google Scholar]
- Whitcomb, L.L. Underwater robotics: Out of the research laboratory and into the field. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 709–716. [Google Scholar]
- Neira, J.; Sequeiros, C.; Huamani, R.; Machaca, E.; Fonseca, P.; Nina, W. Review on unmanned underwater robotics, structure designs, materials, sensors, actuators, and navigation control. J. Robot. 2021, 2021, 5542920. [Google Scholar]
- Antonelli, G. Underwater robots. In Springer Tracts in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2018; Volume 123, ISBN 978-3-319-77898-3. [Google Scholar]
- Sward, D.; Monk, J.; Barrett, N. A systematic review of remotely operated vehicle surveys for visually assessing fish assemblages. Front. Mar. Sci. 2019, 6, 134. [Google Scholar]
- Buscher, E.; Mathews, D.L.; Bryce, C.; Bryce, K.; Joseph, D.; Ban, N.C. Applying a low cost, mini remotely operated vehicle (ROV) to assess an ecological baseline of an indigenous seascape in Canada. Front. Mar. Sci. 2020, 7, 669. [Google Scholar]
- Tran, N.H.; Tran, T.D.; Nguyen, N.D.; Choi, H.S. Study on design, analysis and control an underwater thruster for unmanned underwater vehicle (UUV). Int. Conf. Adv. Eng. Theory Appl. 2018, 456, 753–764. [Google Scholar] [CrossRef]
- Sands, T. Development of deterministic artificial intelligence for unmanned underwater vehicles (UUV). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar]
- Hao, B.; Yan, Z.; Dai, X.; Yuan, Q. Feedback-dubins-RRT recovery path planning of UUV in an underwater obstacle environment. J. Sens. 2020, 3, 8824202. [Google Scholar]
- Yao, H.; Wang, H.; Wang, Y. UUV autonomous decision-making method based on dynamic influence diagram. Complexity 2020, 5, 8565106. [Google Scholar]
- Zhang, X.; Dang, H.; Li, B.; Wen, J. Research on inflation and floating-up process of unmanned underwater vehicle based on collaborative simulation technology. Appl. Ocean Res. 2020, 105, 102411. [Google Scholar]
- Hao, Y.; Qiu, L.; Chi, C.; Liang, G. Sparsity-inducing frequency-domain adaptive line enhancer for unmanned underwater vehicle sonar. Appl. Acoust. 2021, 173, 107689. [Google Scholar]
- Hartono, M.T.; Budiyanto, M.A.; Dhelika, R. Micro class underwater ROV (remotely operated vehicle) as a ship hull inspector: Development of an initial prototype. AIP Conf. Proc. 2020, 2227, 020025. [Google Scholar]
- Sandoy, S.S.; Hegde, J.; Schjolberg, I.; Utne, I.B. Polar map: A digital representation of closed structures for underwater robotic inspection. Aquac. Eng. 2020, 89, 102039. [Google Scholar]
- Shirakura, N.; Kiyokawa, T.; Kumamoto, H.; Takamatsu, J.; Ogasawara, T. Collection of marine debris by jointly using UAV-UUV with GUI for simple operation. IEEE Access 2021, 9, 67432–67443. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, D.; Chen, T.; Zhou, J. Formation control of unmanned underwater vehicles using local sensing means in absence of follower position information. Int. J. Adv. Robot. Syst. 2021, 18, 1729881420986745. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Lian, Z. Application and improvement of the interlayer thermal engine powered by ocean thermal energy in an underwater glider. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 27–31 March 2009; pp. 1–4. [Google Scholar]
- Chen, M.; Sharma, A.; Bhola, J.; Nguyen, T.V.; Truong, C.V. Multi-agent task planning and resource apportionment in a smart grid. Int. J. Syst. Assur. Eng. Manag. 2022, 13, 1–12. [Google Scholar]
- Wang, C.N.; Yang, F.C.; Vo, N.T.; Nguyen, V.T.T. Wireless communications for data security: Efficiency assessment of cybersecurity industry—A promising application for UAVs. Drones 2022, 6, 363. [Google Scholar]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar]
- Juan, F.S.; Carlos, M.; Jose, A.M.N.; Enrique, C.; Manuel, C. Study of the application of PCM to thermal insulation of UUV hulls using Network Simulation Method. Alex. Eng. J. 2021, 60, 4627–4637. [Google Scholar]
- Wang, W.H.; Chen, X.Q.; Marburg, A.; Chase, J.G.; Hann, C.E. A low-cost unmanned underwater vehicle prototype for shallow water tasks. In Proceedings of the 2008 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Beijing, China, 12–15 October 2008; pp. 204–209. [Google Scholar]
- Wang, X.; Shang, J.; Luo, Z.; Tang, L.; Zhang, X.; Li, J. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energy Rev. 2012, 16, 1958–1970. [Google Scholar]
- Khan, S.; Khan, A.; Irfan, M.; Hussain, S. Aerodynamic analysis and dynamic modeling of small horizontal axis wind turbine. In Proceedings of the 2012 International Conference of Robotics and Artificial Intelligence, Islamabad, Pakistan, 22–23 October 2012; pp. 117–124. [Google Scholar]
- Li, Q.; Liu, H. Design of solar energy automatic tracking control system based on single chip microcomputer. In Proceedings of the 4th International Conference on Energy Equipment Science and Engineering, Xi’an, China, 28–30 December 2018; pp. 1–6. [Google Scholar]
- Adnan, A.; Khan, S. Designing and modeling of airborne wind energy system. In Proceedings of the 2022 13th International Conference on Mechanical and Aerospace Engineering (ICMAE), Bratislava, Slovakia, 20–22 July 2022; pp. 372–376. [Google Scholar]
- Liscouët, J. A model-based design methodology for flight control systems: Global 7500 pitch control case study. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 910–922. [Google Scholar]
- Khan, S.; Khan, A.; Zahir, M.Z.; Hussain, S. Dynamic analysis and control of small horizontal axis wind turbine. In Proceedings of the Second Multidisciplinary Conference towards Better Pakistan, Peshawar, Pakistan, 24–25 September 2012; pp. 1–5. [Google Scholar]
- Liu, Y.; Shi, P.; Lim, C.C. Collision-free formation control for multi-agent systems with dynamic mapping. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1984–1988. [Google Scholar] [CrossRef]
- Santhakumar, M.; Asokan, T. Coupled, non-linear control system design for autonomous underwater vehicle (AUV). In Proceedings of the 2008 10th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; pp. 2309–2313. [Google Scholar]
- Lefeber, E.; Pettersen, K.Y.; Nijmeijer, H. Tracking control of an underactuated ship. IEEE Trans. Control Syst. Technol. 2003, 11, 52–61. [Google Scholar]
- Kumar, N.; Rani, M. An efficient hybrid approach for trajectory tracking control of autonomous underwater vehicles. Appl. Ocean Res. 2020, 95, 102053. [Google Scholar]
- Du, X.; Wu, W.; Zhang, W.; Hu, S. Research on UUV recovery active disturbance rejection control based on LMNN compensation. Int. J. Control Autom. Syst. 2021, 19, 2569–2582. [Google Scholar]
- Vardhan, H.; Peter, V.; Janos, S. Constrained bayesian optimization for automatic underwater vehicle hull design. arXiv 2023, arXiv:2302.14732. [Google Scholar]
- Vardhan, H.; Janos, S. Search for universal minimum drag resistance underwater vehicle hull using cfd. arXiv 2023, arXiv:2302.09441. [Google Scholar]
- Lei, L.; Yu, Z.; Gang, Y. Multisource information fusion-based environment perception and dynamic model of underwater vehicle in irregular ocean environment. Inf. Fusion 2023, 94, 257–271. [Google Scholar] [CrossRef]
- An, D.; Yizhuo, M.; Yaqian, W.; Baoke, L.; Yaoguang, W. Intelligent path planning technologies of Underwater Vehicles: A review. J. Intell. Robot. Syst. 2023, 107, 22. [Google Scholar]
- Szlęg, P.; Paweł, B.; Bruno, M.; Szymon, Z.; Emilia, S. Simulation environment for underwater vehicles testing and training in unity 3D. In Proceedings of the 17th International Conference IAS-17, Zagreb, Croatia, 13–16 June 2022; pp. 844–853. [Google Scholar]
- Bingul, Z.; Kursad, G. Intelligent-PID with PD feedforward trajectory tracking control of an Autonomous Underwater Vehicle. Machines 2023, 11, 300. [Google Scholar]
- Cai, L.; Nathan, E.M.; Roger, H.; Aran, M.T.; Yogesh, G. Semi-supervised visual tracking of marine animals using autonomous underwater vehicles. Int. J. Comput. Vis. 2023, 131, 1406–1427. [Google Scholar]
- Ahmed, F.; Xianbo, X.; Chaicheng, J.; Gong, X.; Shaolong, Y. Survey on traditional and AI based estimation techniques for hydrodynamic coefficients of autonomous underwater vehicle. Ocean Eng. 2023, 268, 113300. [Google Scholar]
- Yao, P.; Xinyi, S.; Yuhui, L.; Zhiyao, Z. Vision-based environment perception and autonomous obstacle avoidance for unmanned underwater vehicle. Appl. Ocean Res. 2023, 134, 103510. [Google Scholar]
- Liu, F.; Hao, T.; Yi, Q.; Chaoqun, D.; Jun, L.; Huayan, P. Review on fault diagnosis of unmanned underwater vehicles. Ocean Eng. 2022, 243, 110290. [Google Scholar]
- Tijjani, A.S.; Ahmed, C.; Vincent, C. A survey on tracking control of unmanned underwater vehicles: Experiments-based approach. Annu. Rev. Control 2022, 54, 125–147. [Google Scholar]
- Hua, C.; Jian, Z.; Xi, L.; Wenliang, P. Position-velocity constrained trajectory tracking control for unmanned underwater vehicle with model uncertainties. Ocean Eng. 2022, 266, 112784. [Google Scholar]
- Li, J.; Zhenhua, W.; Yujia, W.; Mingjun, Z.; Tarek, R. Interval velocity estimation for Unmanned Underwater Vehicles. IEEE Control Syst. Lett. 2022, 7, 715–720. [Google Scholar] [CrossRef]
- Kilavuz, A.; Ozgoren, M.; Kavurmacioglu, L.A.; Durhasan, T.; Sarigiguzel, F.; Sahin, B.; Akilli, H.; Sekeroglu, E.; Yaniktepe, B. Flow characteristics comparison of PIV and numerical prediction results for an unmanned underwater vehicle positioned close to the free surface. Appl. Ocean Res. 2022, 129, 103399. [Google Scholar]
- Konoplin, A.; Alexander, Y.; Nikita, K.; Pavel, P. Development of a control system for multilink manipulators on unmanned underwater vehicles dynamically positioned over seafloor objects. Appl. Sci. 2022, 12, 1666. [Google Scholar] [CrossRef]
- Bibuli, M.; Enrica, Z.; Daniela, D.P.; Roberta, I.; Giovanni, I. Analysis of an unmanned underwater Vehicle propulsion model for motion control. J. Guid. Control Dyn. 2022, 45, 1046–1059. [Google Scholar]
- Sands, T. Control of DC motors to guide unmanned underwater vehicles. Appl. Sci. 2021, 11, 2144. [Google Scholar] [CrossRef]
- Manzanilla, A.; Efraín, I.; Sergio, S.; Ángel, E.; Zamora, R.L.; Filiberto, M. Super-twisting integral sliding mode control for trajectory tracking of an Unmanned Underwater Vehicle. Ocean Eng. 2021, 234, 109164. [Google Scholar] [CrossRef]
- Yar, G.N.A.H.; Ahmad, A.; Khurshid, K. Low cost assembly design of unmanned underwater vehicle (UUV). In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 829–834. [Google Scholar]
- Kutzke, D.T.; James, B.C.; Benjamin, T.H. Subsystem selection for digital twin development: A case study on an unmanned underwater vehicle. Ocean Eng. 2021, 223, 108629. [Google Scholar] [CrossRef]
- Hadi, B.; Khosravi, A.; Sarhadi, P. A review of the path planning and formation control for multiple autonomous underwater vehicles. J. Intell. Robot. Syst. 2021, 101, 67. [Google Scholar]
- Li, J.; Xia, Y.; Xu, G.; He, Z.; Xu, K.; Xu, G. Three-dimensional prescribed performance tracking control of UUV via PMPC and RBFNN-FTTSMC. J. Mar. Sci. Eng. 2023, 11, 1357. [Google Scholar] [CrossRef]
- Salgado-Jimenez, T.; Spiewak, J.M.; Fraisse, P.; Jouyence, B. A robust control algorithm for AUV based on a high order sliding mode. In Proceedings of the Oceans ‘04 MTS/IEEE Techno-Ocean ‘04 (IEEE Cat. No.04CH37600), Kobe, Japan, 9–12 November 2004; Volume 1, pp. 276–281. [Google Scholar]
- Gao, J.; Proctor, A.A.; Shi, Y.; Bradley, C. Hierarchical model predictive image-based visual servoing of underwater vehicles with adaptive neural network dynamic control. IEEE Trans. Cybern. 2016, 46, 2323–2334. [Google Scholar] [CrossRef]
- González-García, J.; Narcizo-Nuci, N.A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-free high order sliding mode control with finite-time tracking for unmanned underwater vehicles. Appl. Sci. 2021, 11, 1836. [Google Scholar] [CrossRef]
- Ding, X.; Zhu, D. Research on static fault-tolerant control method of UUV based on MPC in two dimensions. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 5333–5338. [Google Scholar]
- Wang, S.; Guo, J.; Mao, Y.; Wang, H.; Fan, J. Research on the model predictive trajectory tracking control of unmanned ground tracked vehicles. Drones 2023, 7, 496. [Google Scholar] [CrossRef]
- Gong, J.W.; Jiang, Y.; Xu, W. Model Predictive Control for Self-Driving Vehicles; Beijing Institute of Technology Press: Beijing, China, 2014; pp. 38–39. [Google Scholar]
- Wei, Z.; Qiang, W.; Wenhua, W.; Xue, D.; Yu, Z.; Peiyu, H. Event-trigger NMPC for 3-D trajectory tracking of UUV with external disturbances. Ocean. Eng. 2023, 283, 115050. [Google Scholar]
- Ullah, S.; Khan, Q.; Mehmood, A.; Kirmani, S.A.M.; Mechali, O. Neuro-adaptive fast integral terminal sliding mode control design with variable gain robust exact differentiator for under-actuated quadcopter UAV. ISA Trans. 2022, 120, 293–304. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Liu, L.; Zhang, X.; Qiao, W.; Ren, R.; Zhu, B.; Zhang, L.; Pan, G.; Yu, Y. Critical node identification of Multi-UUV formation based on network structure entropy. J. Mar. Sci. Eng. 2023, 11, 1538. [Google Scholar] [CrossRef]
- Nie, J.; Yuh, J.; Kardash, E.; Fossen, T.I. On-board sensor-based adaptive control of small UUVs in very shallow water. Int. J. Adapt. Control Signal Process. 2000, 14, 441–452. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Design of adaptive controller exploiting learning concepts applied to a BLDC-Based drive system. Energies 2020, 13, 2512. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Liu, S.; Zhou, J.; Papavassiliou, C. Low-level control technology of micro autonomous underwater vehicle based on intelligent computing. Cluster Comput. 2019, 22, 8569–8580. [Google Scholar] [CrossRef]
- Zhang, Y.; Che, J.; Hu, Y.; Cui, J.; Cui, J. Real-time ocean current compensation for AUV trajectory tracking control using a meta-learning and self-adaptation hybrid approach. Sensors 2023, 23, 6417. [Google Scholar] [CrossRef]
- Gavrilina, E.A.; Chestnov, V.N. Synthesis of an attitude control system for unmanned underwater vehicle using H-infinity approach. IFAC Pap. 2020, 53, 14642–14649. [Google Scholar] [CrossRef]
- Diab, A.A.Z.; El-Sayed, A.-H.M.; Abbas, H.H.; Sattar, M.A.E. Robust speed controller design using H_infinity theory for high-performance sensorless induction motor drives. Energies 2019, 12, 961. [Google Scholar] [CrossRef]
- Iswanto, I.; Ahmad, I. Second order integral fuzzy logic control based rocket tracking control. J. Robot. Control. 2021, 2, 594–604. [Google Scholar]
- Xiao-Xu, D.; Song, B.; Pan, G. DPS motion simulation of UUV based on fuzzy controller. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010. [Google Scholar]
- Zhu, B.; Liu, L.; Zhang, L.; Liu, M.; Duanmu, Y.; Chen, Y.; Dang, P.; Li, J. A variable-order fuzzy logic controller design method for an unmanned underwater vehicle based on NSGA-II. Fractal Fract. 2022, 6, 577. [Google Scholar] [CrossRef]
- Rojas, J.; Baatar, G.; Cuellar, F.; Eichhorn, M.; Glotzbach, T. Modelling and essential control of an oceanographic monitoring remotely operated underwater vehicle. IFAC Papers 2018, 51, 213–219. [Google Scholar] [CrossRef]
- Kumar, P.; Narayan, S.; Raheja, J. Optimal design of robust fractional order PID for the flight control system. Int. J. Comput. Appl. 2015, 128, 31–35. [Google Scholar] [CrossRef]
- Li, X.; Xu, J.; Xia, G.; Zhao, J. Research on UUV’s heading control based on adaptive robust PD control principle. In Proceedings of the International Conference on Mechatronics and Automation (ICMA), Beijing, China, 7–10 August 2011. [Google Scholar]
- Sola, Y.; Le Chenadec, G.; Clement, B. Simultaneous control and guidance of an AUV based on soft actor–critic. Sensors 2022, 22, 6072. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, C.; Wei, Y.; Zhang, C. Three-dimensional path following of an underactuated AUV based on neuro-adaptive command filtered backstepping control. IEEE Access 2018, 6, 74355–74365. [Google Scholar] [CrossRef]
- Wang, Y.T.; Yan, W.; Gao, B.; Cui, R. Backstepping-based path following control of an underactuated autonomous underwater vehicle. In Proceedings of the 2009 International Conference on Information and Automation, Zhuhai/Macau, China, 22–24 June 2009; pp. 466–471. [Google Scholar]
- Harun, N.; Zain, Z.M. A backstepping based PID controller for stabilizing an underactuated X4-AUV. J. Eng. Appl. Sci. 2015, 10, 9819–9824. [Google Scholar]
- Do, K.D. Global tracking control of underactuated ODINs in three-dimensional space. Int. J. Control 2013, 86, 183–196. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Integrated guidance and control strategy for homing of unmanned underwater vehicles. J. Frankl. Inst. 2019, 356, 3831–3848. [Google Scholar] [CrossRef]
- Song, Y.; Scaramuzza, D. Policy search for model predictive control with application to agile drone flight. IEEE Trans. Robot. 2022, 38, 2114–2130. [Google Scholar] [CrossRef]
- Chu, L.; Li, H.; Xu, Y.; Zhao, D.; Sun, C. Research on longitudinal control algorithm of adaptive cruise control system for pure electric vehicles. World Electr. Veh. J. 2023, 14, 32. [Google Scholar] [CrossRef]
- Dorobantu, A.; Murch, A.; Balas, G. H-infinity robust control design for the NASA AirSTAR flight test vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar]
- Singh, H.; Gupta, M.M.; Meitzler, T.; Hou, Z.G.; Garg, K.K.; Solo, A.M.; Zadeh, L.A. Real-life applications of fuzzy logic. Adv. Fuzzy Syst. 2013, 2013, 581879. [Google Scholar] [CrossRef]
- Liu, G.P.; Daley, S. Optimal-tuning PID control for industrial systems. Control Eng. Pract. 2001, 9, 1185–1194. [Google Scholar] [CrossRef]
- Cong, B.; Liu, X.; Chen, Z. Backstepping based adaptive sliding mode control for spacecraft attitude maneuvers. Aerosp. Sci. Technol. 2013, 30, 1–7. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No. | Control Algorithms | Pros | Cons |
|---|---|---|---|
| 1 | Model predictive control [64,66] |
|
|
| 2 | Adaptive control [81] |
|
|
| 3 | H∞ control [74] |
|
|
| 4 | Fuzzy control [76,77] |
|
|
| 5 | PID control [79,80,81] |
|
|
| 6 | Backstepping control [83,84,85,86,87] |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bashir, A.; Khan, S.; Iqbal, N.; Bashmal, S.; Ullah, S.; Fayyaz; Usman, M. A Review of the Various Control Algorithms for Trajectory Control of Unmanned Underwater Vehicles. Sustainability 2023, 15, 14691. https://doi.org/10.3390/su152014691
Bashir A, Khan S, Iqbal N, Bashmal S, Ullah S, Fayyaz, Usman M. A Review of the Various Control Algorithms for Trajectory Control of Unmanned Underwater Vehicles. Sustainability. 2023; 15(20):14691. https://doi.org/10.3390/su152014691
Chicago/Turabian StyleBashir, Adeel, Sikandar Khan, Naveed Iqbal, Salem Bashmal, Sami Ullah, Fayyaz, and Muhammad Usman. 2023. "A Review of the Various Control Algorithms for Trajectory Control of Unmanned Underwater Vehicles" Sustainability 15, no. 20: 14691. https://doi.org/10.3390/su152014691
APA StyleBashir, A., Khan, S., Iqbal, N., Bashmal, S., Ullah, S., Fayyaz, & Usman, M. (2023). A Review of the Various Control Algorithms for Trajectory Control of Unmanned Underwater Vehicles. Sustainability, 15(20), 14691. https://doi.org/10.3390/su152014691