

Effects of Object-Oriented Advance Guidance Signage on Lane-Changing Behaviors at the Mainline Toll Stations of Expressways

Abstract
:
1. Introduction
2. Previous Research
- (1)
- With the increasing proportion of ETC vehicles, are the existing guiding systems still applicable?
- (2)
- To investigate whether drivers’ lane-changing behavior significantly improves after obtaining instructions in advance.
- (3)
- Can voice warnings help drivers to complete lane-changing more effectively?
3. Methodology
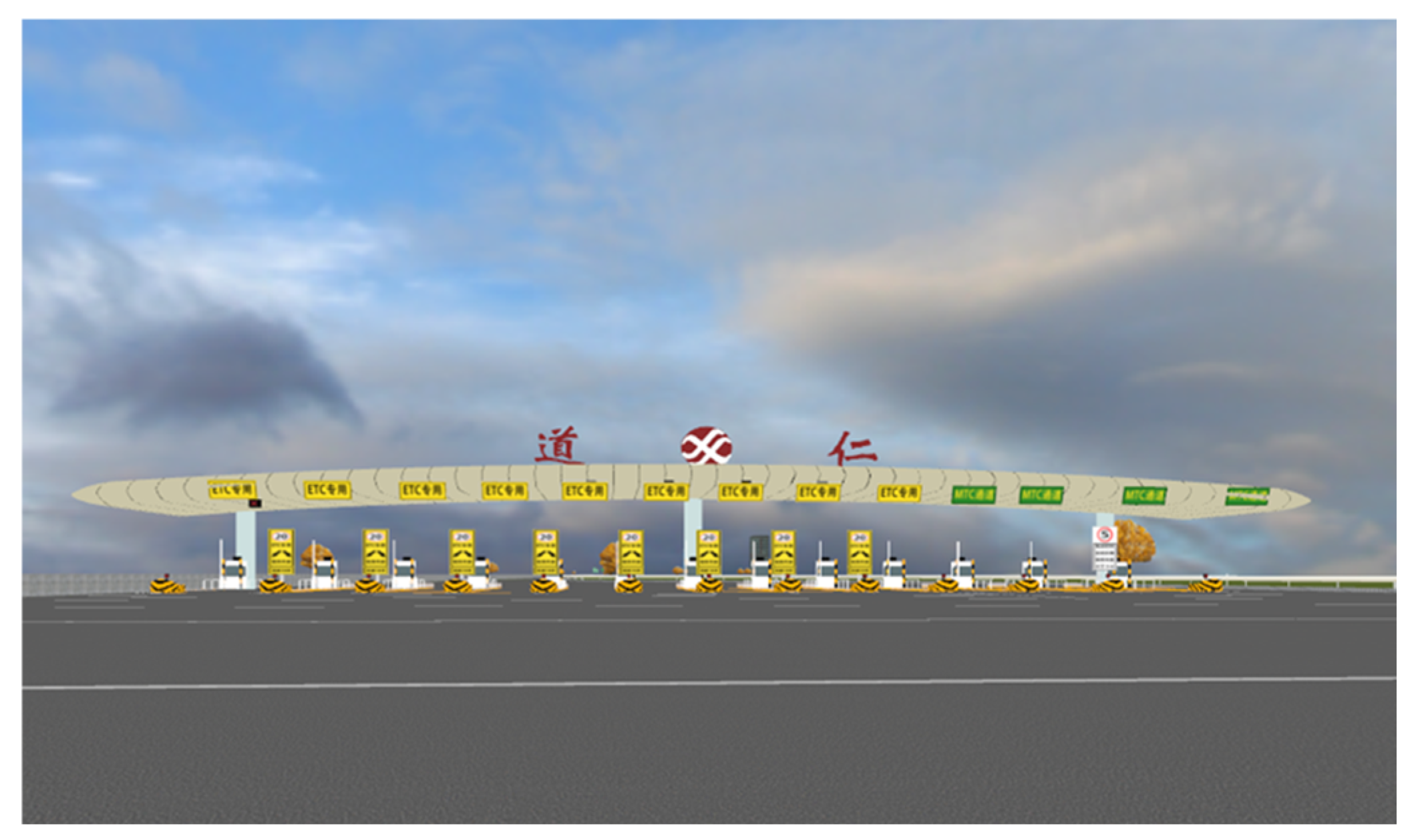
3.1. Scenario Design
3.2. Participants
3.3. Apparatus
3.4. Experimental Procedure
3.5. Variable Definitions
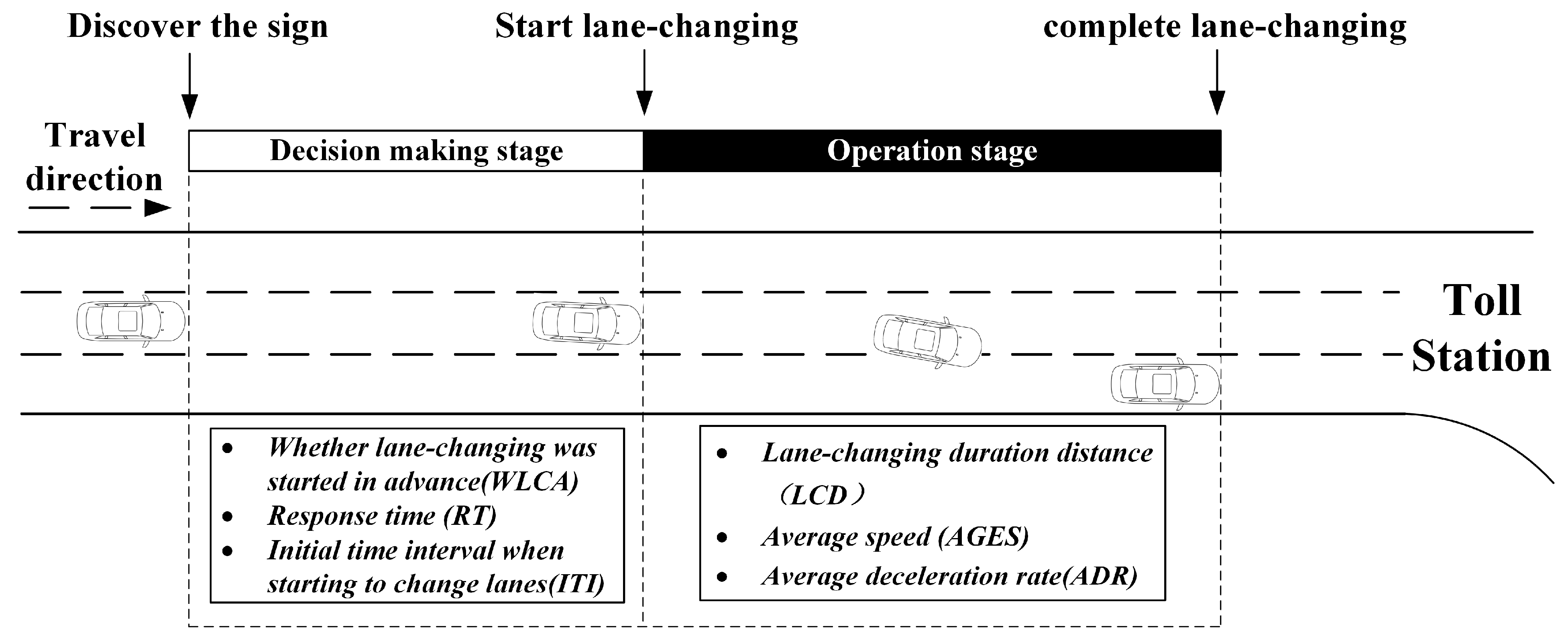
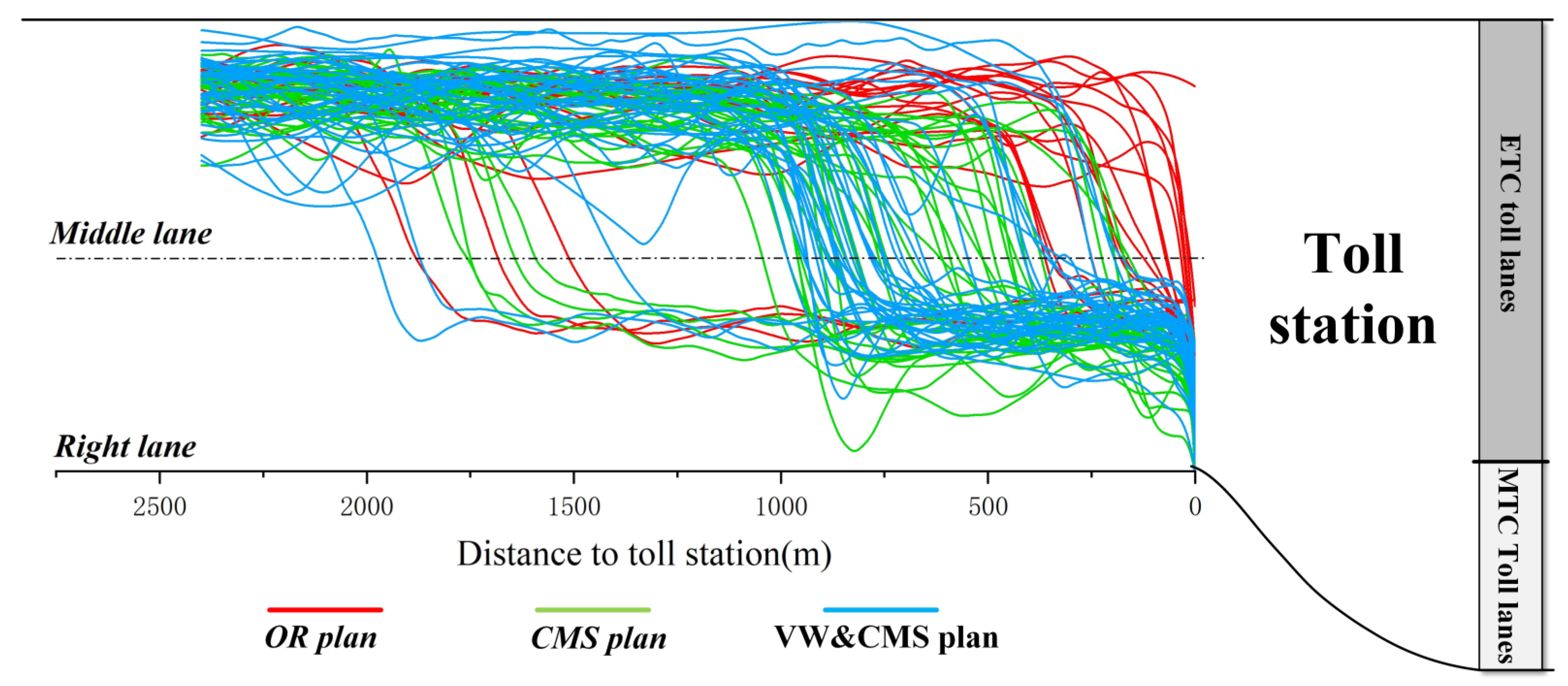
- Whether lane-changing was started in advance (WLCA) (Non-changing = 0; Changing = 1): Changing (1) means that the driver started changing lanes prior to the “toll station entrance” sign, and non-changing (0) means that they did not. Lane-changing depends on whether the driving conditions in the adjacent lane are better than the current lane [28]. Drivers that change lanes at an earlier point are less likely to collide with other vehicles when approaching the toll plaza.
- Response time (RT): Being limited by the lack of an eye-tracker, the study used the same starting point (e.g., the 2 km sign) to measure the participants’ response time, i.e., the time interval from the moment when the driver passed the “2 km” sign to the moment when the lane-changing started (in s).
- Initial time interval when starting to change lanes (ITI): This is the quotient of the distance from the “0 km” sign at the initial time of the lane-changing, divided by the speed at the initial time of lane-changing (in s).
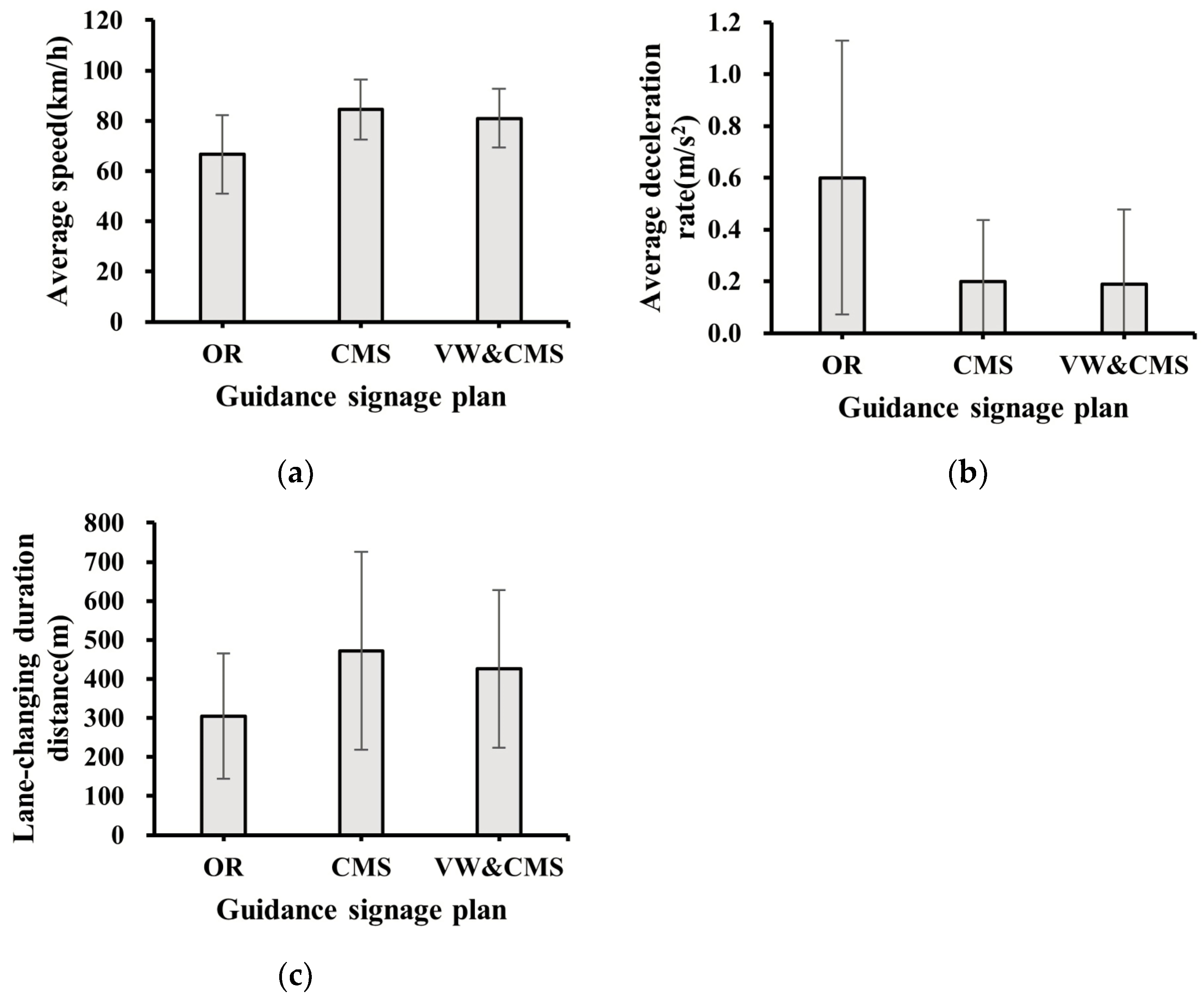
- Lane-changing duration distance (LCD): the longitudinal distance between the start and end of the lane-changing (in m).
- Average speed (AGES): the average speed during the lane-changing operation stage (in km/h).
- Average deceleration rate (ADR): the average deceleration rate during the lane-changing operation stage (in m/s2).
3.6. Statistical Analysis
4. Results
4.1. Influences on Driving Behaviors
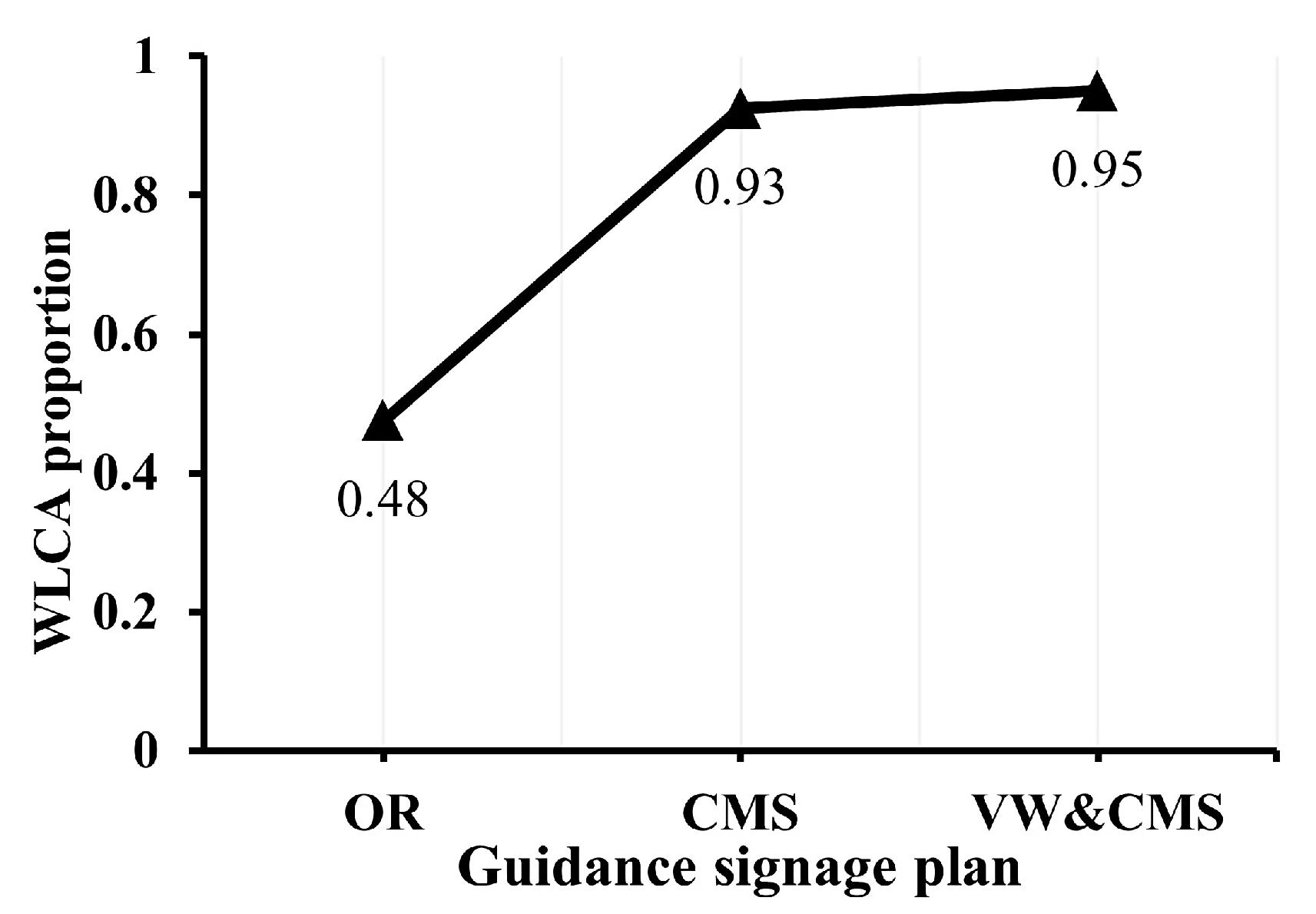
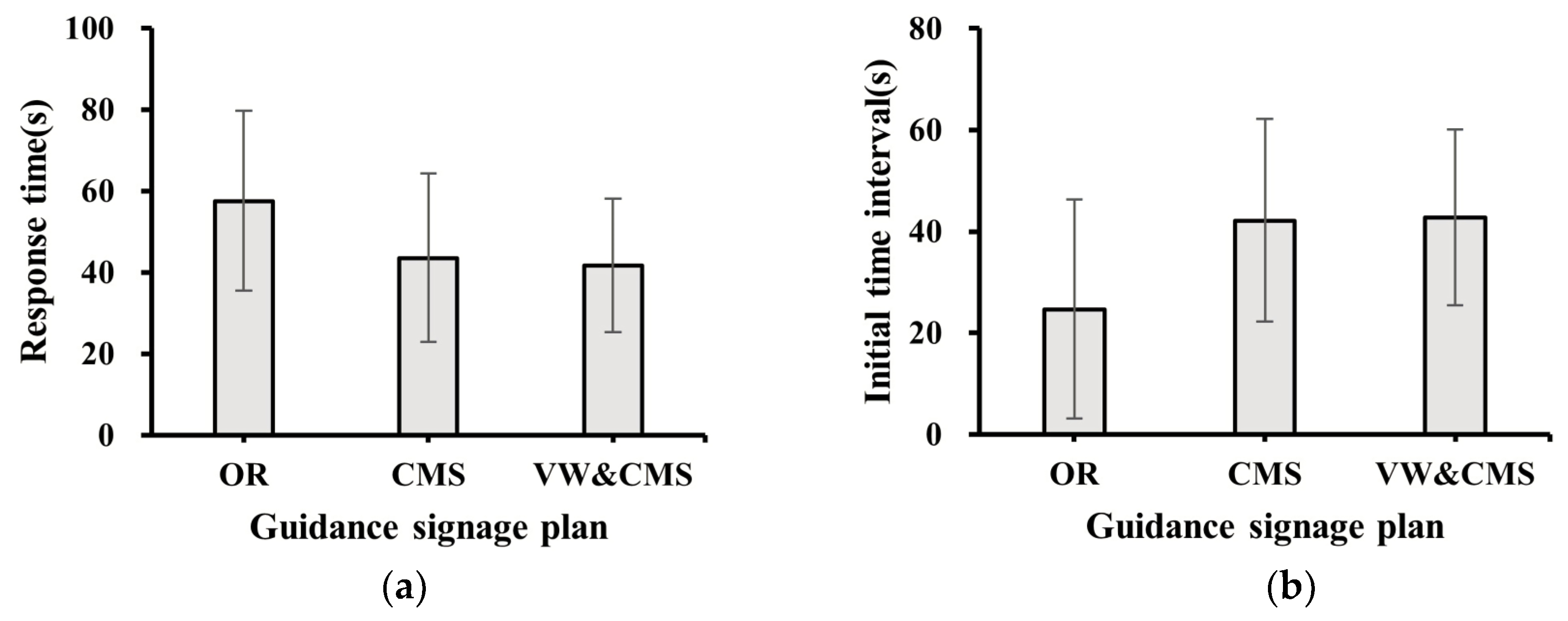
4.1.1. Lane-Changing Decision-Making Stage
4.1.2. Lane-Changing Operation Stage
4.2. Evaluation of the Effectiveness of Different Guidance Signage Plans
4.2.1. TOPSIS Algorithm
4.2.2. Results of the TOPSIS algorithm in different guidance plans
5. Discussion
6. Conclusions
- With the increasing proportion of ETC vehicles and the number of ETC lanes increasing, the existing guiding systems are not sufficient to guide the MTC vehicles, resulting in a more unsafe lane-changing process.
- The complete guidance design plan (CMS) guidance signage (provided guidance information at 500 m and 1 km upstream of the toll station) can allow drivers to have a shorter response time and earlier initial time interval and higher speed as the lane-changing progresses. In addition, the proportion of drivers who successfully complete lane-changing in advance may increase.
- Adding voice warnings to the complete guidance design plan guidance signage may not be necessary, as the process of lane-changing behaviors was not significantly improved.
- Male drivers are safer than female drivers during the lane-changing operation stage.
- With an increase in age, drivers may have greater risk perception; they are more cautious during the lane-changing operation stage, such as a lower deceleration rate.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- National Highway ETC Utilization Rate Exceeds 65.98% Slow Traffic Congestion Relief at Toll Stations. Available online: http://news.china.com.cn/txt/2020-10/28/content_76852695.htm (accessed on 30 October 2022).
- GB5768.2-2022; National Standards of the People’s Republic of China: Road Traffic Signs and Markings-Part 2: Road Traffic Signs. General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China, China National Standardization Management Committee: Beijing, China, 2022.
- Zhao, N.; Zhao, X.; Lin, Z.; Zhu, X. Exit Gore Sign Forms for Freeway Based on Driving Behavior. China J. Highw. Transp. 2020, 04, 137–145. [Google Scholar]
- Huang, L.; Zhao, X.; Li, Y.; Ma, J.; Yang, L.; Rong, J.; Wang, Y. Optimal design alternatives of advance guide signs of closely spaced exit ramps on urban expressways. Accid. Anal. Prev. 2020, 138, 105465. [Google Scholar] [CrossRef] [PubMed]
- Shu, W. Design of road signs on urban expressways. China Foreign Highw. 2004, 24, 184–186. [Google Scholar]
- Hung, C. Manual de Señalización Vial y Dispositivos de Seguridad; Secretaría de Comunicaciones y Transportes: Mexico City, Mexico, 2014; p. 770. [Google Scholar]
- La Secretaría de Comunicaciones y Transportes México. Manual de Señalización Vial de Dispositivos Uniformes Para la Regulación de Tránsito en las vías de Colombia, 1st ed.; Gerardo Ávila Rodriguez: Bogotá, Colombia, 2015. [Google Scholar]
- Wang, J.; Hesar, S.; Collyer, C.E. Adding graphics to dynamic message sign messages. Transp. Res. Rec. 2018, 1, 63–71. [Google Scholar] [CrossRef]
- Cristea, M.; Delhomme, P. Comprehension and acceptability of on-board traffic information: Beliefs and driving behaviour. Accid. Anal. Prev. 2014, 65, 123–130. [Google Scholar] [CrossRef]
- Shinar, D.; Vogelzang, M. Comprehension of traffic signs with symbolic versus text displays. Transp. Res. Part F Traffic Psychol. Behav. 2013, 18, 72–82. [Google Scholar] [CrossRef]
- Marc, G. Visual search: Detection, identification, and localization. Perception 1992, 21, 765–777. [Google Scholar]
- Shiffrim, R.M.; Schneider, W.E. Controlled and automatic human information processing I. Detection, search, and attention. Psychol. Rev. 1997, 84, 1–66. [Google Scholar]
- Marc, G. “How Long Does It Take to Stop?” methodological analysis of driver perception-brake times. Transp. Hum. Factors 2000, 2, 195–216. [Google Scholar]
- Vanderbilt, T.; Brenner, B. Traffic: Why We Drive the Way We Do (and What it Says About Us); Knopf, A.A., Ed.; Vintage: New York, NY, USA, 2009; pp. 40–49. [Google Scholar]
- Yang, M.; Zhou, Z.; Wang, C.; Li, Y. Research on relationship between information load of freeway combined guide signs and reaction time. China Saf. Sci. J. 2014, 05, 15–20. [Google Scholar]
- Yao, X.; Zhao, X.; Liu, H.; Huang, L.; Ma, J.; Yin, J. An approach for evaluating the effectiveness of traffic guide signs at intersections. Accid. Anal. Prev. 2019, 129, 7–20. [Google Scholar] [CrossRef] [PubMed]
- Zahabi, M.; Machado, P.; Lau, M.Y.; Deng, Y.; Pankok, C.; Hummer, J.; Kaber, D.B. Driver performance and attention allocation in use of logo signs on freeway exit ramps. Appl. Ergon. 2017, 65, 70–80. [Google Scholar] [CrossRef] [PubMed]
- Lyu, N.; Cao, Y.; Wu, C.; Xu, J.; Xie, L. The effect of gender, occupation and experience on behavior while driving on a freeway deceleration lane based on field operational test data. Accid. Anal. Prev. 2018, 121, 82–93. [Google Scholar] [CrossRef] [PubMed]
- Upchurch, J.; Fisher, D.L.; Waraich, B. Guide Signing for Two-lane Exits with an Option Lane: Evaluation of Human Factors; Transportation Research Board: Washington, DC, USA, 2005. [Google Scholar]
- Fitzpatrick, K.; Chrysler, S.T.; Brewer, M.A.; Nelson, A.; Iragavarapu, V. Simulator Study of Signs for A Complex Interchange and Complex Interchange Spreadsheet Tool; Federal Highway Administration: Washington, DC, USA, 2013. [Google Scholar]
- Liu, X.; Zhang, W.; Wei, Z.; Zhang, Z.; Jiang, Y.; Zhu, Y. Evaluation and Optimization of Traffic Guide Sign Layout. J. Beijing Univ. Technol. 2015, 41, 95–102. [Google Scholar]
- Xie, X.; Jia, Z. Evaluation of the Expression of Intersection Direction Signs Based on Weight-TOPSIS. J. Taiyuan Univ. Sci. Technol. 2022, 43, 242–246. [Google Scholar]
- Tao, Y.; Feng, Z.; Liu, Y. The Effect of Construction of Multi-objective Function on the Process of Optimization. J. Taiyuan Univ. Sci. Technol. 2016, 37, 201–206. [Google Scholar]
- Niu, X. Comparative study of modern statistical computing method and intelligent statistical computing method. Stat. Consult. 2014, 05, 37–38. [Google Scholar]
- Yeh, C.H. The selection of multiattribute decision making methods for scholarship student selection. Int. J. Sel. Ass. 2003, 11, 289–296. [Google Scholar] [CrossRef]
- Zeng, J.; Qian, Y.; Yin, F.; Zhu, L.; Xu, D. A multi-value cellular automata model for multi-lane traffic flow under lagrange coordinate. Comput. Math. Organ. Theory 2022, 28, 178–192. [Google Scholar] [CrossRef]
- Luo, Z. Study on the Capacity and ETC Lane Configuration of Expressway Toll Station. Master’s Thesis, East China Jiaotong University, Nanchang, China, 2019. [Google Scholar]
- Zeng, J.; Qian, Y.; Li, J.; Zhang, Y.; Xu, D. Congestion and energy consumption of heterogeneous traffic flow mixed with intelligent connected vehicles and platoons. Phys. A Stat. Mech. Its Appl. 2023, 609, 128331. [Google Scholar] [CrossRef]
- Dahmen, G.; Ziegler, A. Generalized estimating equations in controlled clinical trials: Hypotheses testing. Biom. J. J. Math. Methods Biosci. 2004, 46, 214–232. [Google Scholar] [CrossRef]
- Qin, G.; Chen, T.; Li, W.; Sun, B. Fu CW-TOPSIS mine internal caused fire evaluation model of “AHP + entropy weight method”. J. Xian Univ. Sci. Technol. 2018, 02, 193–201. [Google Scholar]
- Chakraborty, S. TOPSIS and Modified TOPSIS: A comparative analysis. Decis. Anal. J. 2022, 02, 100021. [Google Scholar] [CrossRef]
- Pathria, R.K.; Beale, P. Statistical Mechanics, 3rd ed.; Academic Press: Cambridge, MA, USA, 2011; p. 51. [Google Scholar]
- Deng, H.; Yeh, C.-H.; Willis, R. Inter-company comparison using modified TOPSIS with objective weights. Comput. Op. Res. 2000, 27, 963–973. [Google Scholar] [CrossRef]
- Roswarski, T.E.; Proctor, R.W. Auditory stimulus-response compatibility: Is there a contribution of stimulus-hand correspondence? Psychol. Res. Psychol. Forsch. 2000, 63, 148–158. [Google Scholar] [CrossRef]
- Xiang, W.; Yan, X.; Weng, J.; Li, X. Effect of auditory in-vehicle warning information on drivers’ brake response time to red-light running vehicles during collision avoidance. Transp. Res. Part F Traffic Psychol. Behav. 2016, 40, 56–67. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Y.; Bi, C.; Weng, J.; Yan, X. Modeling the probability of freeway lane-changing collision occurrence considering intervehicle interaction. Traffic Inj. Prev. 2016, 17, 181–187. [Google Scholar] [CrossRef]
- Ali, Y.; Bliemer, M.C.J.; Zheng, Z.; Haque, M.M. Cooperate or not? Exploring drivers’ interactions and response times to a lane-changing request in a connected environment. Transp. Res. Part C Emerg. Technol. 2020, 120, 102816. [Google Scholar] [CrossRef]
- Xiang, W.; Wang, C.; Li, X.; Xue, Q.; Liu, X. Optimizing guidance signage system to improve drivers’ lane-changing behavior at the expressway toll plaza. Transp. Res. Part F Traffic Psychol. Behav. 2022, 90, 382–396. [Google Scholar] [CrossRef]
- Eby, D.; Trombley, D.; Molnar, L.; Shope, J. The Assessment of Older Drivers’ Capabilities: A Review of the Literature (Report UMTR-98-24); University of Michigan Transportation Research Report Institute: Ann Arbor, MI, USA, 1998. [Google Scholar]
- Chen, T.; Sze, N.N.; Newnam, S.; Bai, L. Effectiveness of the compensatory strategy adopted by older drivers: Difference between professional and non-professional drivers. Transp. Res. Part F Traffic Psychol. Behav. 2021, 77, 168–180. [Google Scholar] [CrossRef]
- Molnar, L.J.; David, W.E. The relationship between self-regulation and driving-related abilities in older drivers: An exploratory study. Traffic Inj. Prevention. 2008, 9, 314–319. [Google Scholar] [CrossRef] [PubMed]
- Newnam, S.; Koppel, S.; Molnar, L.J.; Zakrajsek, J.S.; Eby, D.W.; Blower, D. Older truck drivers: How can we keep them in the workforce for as long as safely possible? Saf. Sci. 2020, 121, 589–593. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| Guidance signage plan | OR (baseline) = 0; CMS = 1; VW&CMS = 2 |
| Driver characteristics | |
| Gender | Male (baseline) = 0; Female = 1 |
| Age | Continuous variable |
| Variable | Whether Lane-Changing Was Started in Advance (WLCA) | |||
|---|---|---|---|---|
| Estimate (SE) | Exp (Estimate) | Wald | p-Value | |
| Constant | −0.145 (1.144) | 0.865 | 0.016 | 0.899 |
| Guidance plan (CMS) | 2.621 (0.667) | 13.744 | 15.420 | 0.000 |
| Guidance plan (VW&CMS) | 3.053 (0.739) | 21.183 | 17.086 | 0.000 |
| Gender (Female) | −0.283 (0.556) | 0.754 | 0.259 | 0.611 |
| Age | 0.004 (0.029) | 1.004 | 0.015 | 0.901 |
| Variable | Response time (RT) | Initial Time Interval (ITI) | ||||
|---|---|---|---|---|---|---|
| Estimate (SE) | Wald | p-Value | Estimate (SE) | Wald | p-Value | |
| Constant | 55.374 (9.144) | 36.672 | 0.000 | 42.523 (9.507) | 20.004 | 0.000 |
| Guidance plan (CMS) | −14.488 (5.668) | 6.533 | 0.011 | 17.333 (5.509) | 9.901 | 0.002 |
| Guidance plan (VW&CMS) | −16.314 (5.223) | 9.757 | 0.002 | 18.029 (5.244) | 11.818 | 0.001 |
| Gender (Female) | 2.218 (3.856) | 0.331 | 0.565 | 3.93 (5.122) | 0.589 | 0.443 |
| Age | 0.059 (0.186) | 0.102 | 0.749 | −0.548 (0.224) | 5.978 | 0.014 |
| Variable | Average Speed (AGES) | Average Deceleration Rate (ADR) | Lane-Changing Duration Distance (LCD) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Estimate (SE) | Wald | p-Value | Estimate (SE) | Wald | p-Value | Estimate (SE) | Wald | p-Value | |
| Constant | 57.725 (5.367) | 115.677 | 0.000 | −0.255 (0.136) | 3.528 | 0.060 | 381.449 (113.301) | 11.335 | 0.001 |
| Guidance plan (CMS) | 18.26 (3.849) | 22.502 | 0.000 | 0.386 (0.102) | 14.343 | 0.000 | 190.126 (53.269) | 12.739 | 0.000 |
| Guidance plan (VW&CMS) | 14.706 (3.815) | 14.859 | 0.000 | 0.401 (0.119) | 11.249 | 0.001 | 143.795 (50.144) | 8.223 | 0.004 |
| Gender (Female) | −3.816 (3.037) | 1.578 | 0.209 | 0.09 (0.083) | 1.200 | 0.273 | −127.641 (45.929) | 7.724 | 0.005 |
| Age | 0.277 (0.147) | 3.569 | 0.059 | −0.01 (0.004) | 6.237 | 0.013 | −1.916 (3.358) | 0.326 | 0.568 |
| Rank | ||||
|---|---|---|---|---|
| OR plan | 0.753 | 0 | 0 | 3 |
| CMS plan | 0.040 | 0.726 | 0.947 | 1 |
| VW&CMS plan | 0.123 | 0.686 | 0.848 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Xiang, W.; Xu, G.; Li, X. Effects of Object-Oriented Advance Guidance Signage on Lane-Changing Behaviors at the Mainline Toll Stations of Expressways. Sustainability 2023, 15, 982. https://doi.org/10.3390/su15020982
Wang C, Xiang W, Xu G, Li X. Effects of Object-Oriented Advance Guidance Signage on Lane-Changing Behaviors at the Mainline Toll Stations of Expressways. Sustainability. 2023; 15(2):982. https://doi.org/10.3390/su15020982
Chicago/Turabian StyleWang, Chaolun, Wang Xiang, Guiqiu Xu, and Xiaomeng Li. 2023. "Effects of Object-Oriented Advance Guidance Signage on Lane-Changing Behaviors at the Mainline Toll Stations of Expressways" Sustainability 15, no. 2: 982. https://doi.org/10.3390/su15020982
APA StyleWang, C., Xiang, W., Xu, G., & Li, X. (2023). Effects of Object-Oriented Advance Guidance Signage on Lane-Changing Behaviors at the Mainline Toll Stations of Expressways. Sustainability, 15(2), 982. https://doi.org/10.3390/su15020982