



Low-Cost 3D Virtual and Dynamic Reconstruction Approach for Urban Forests: The Mesiano University Park

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
2. Background
2.1. Conventional Framework for Forest Survey
2.2. The Advent of Digital 3D Data in Forestry
3. Low-Cost Workflow for 3D Urban Forests: Tools and Methods
3.1. Case Study: The Mesiano University Park in Trento (Italy)
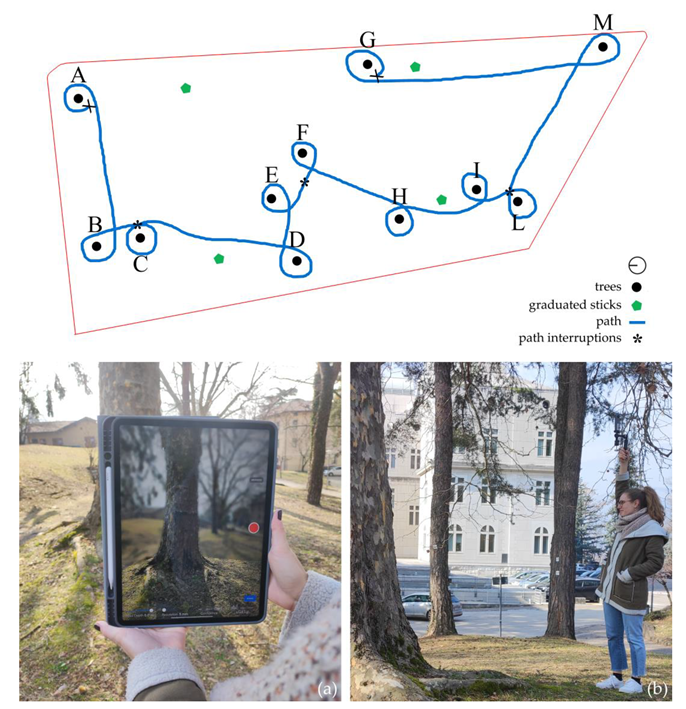
3.2. Data Acquisition
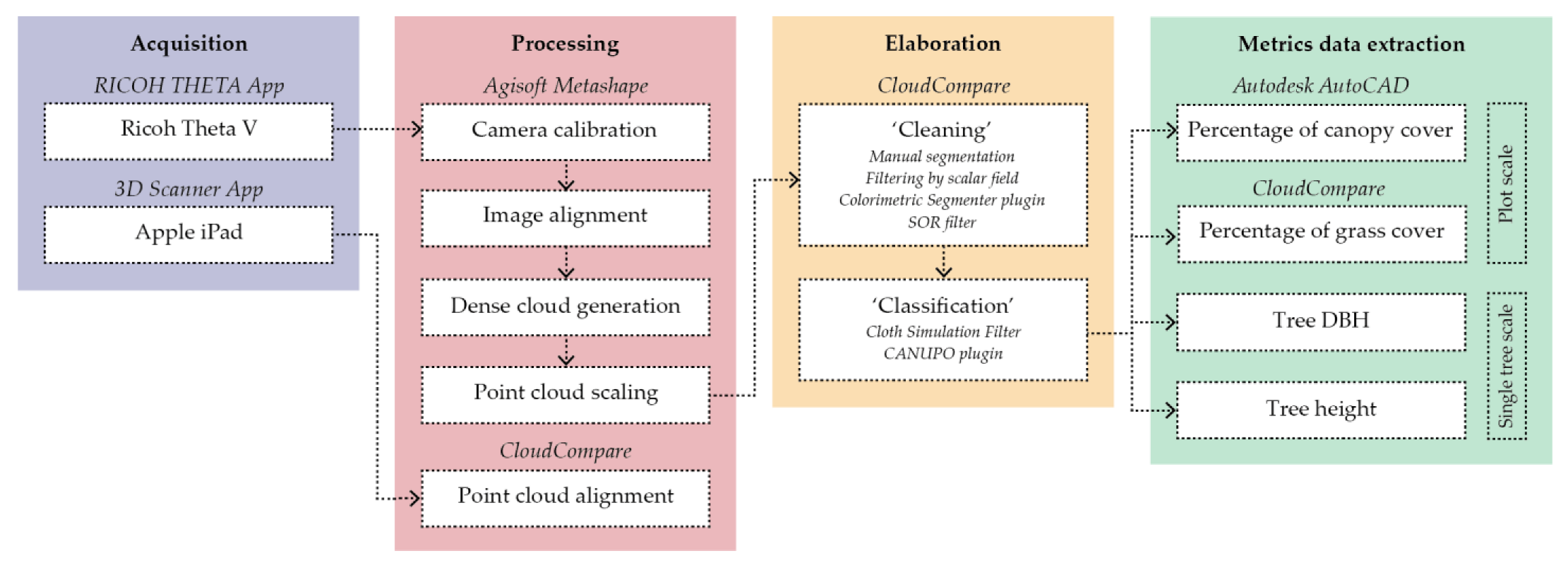
3.3. Data Processing
3.4. Data Elaboration
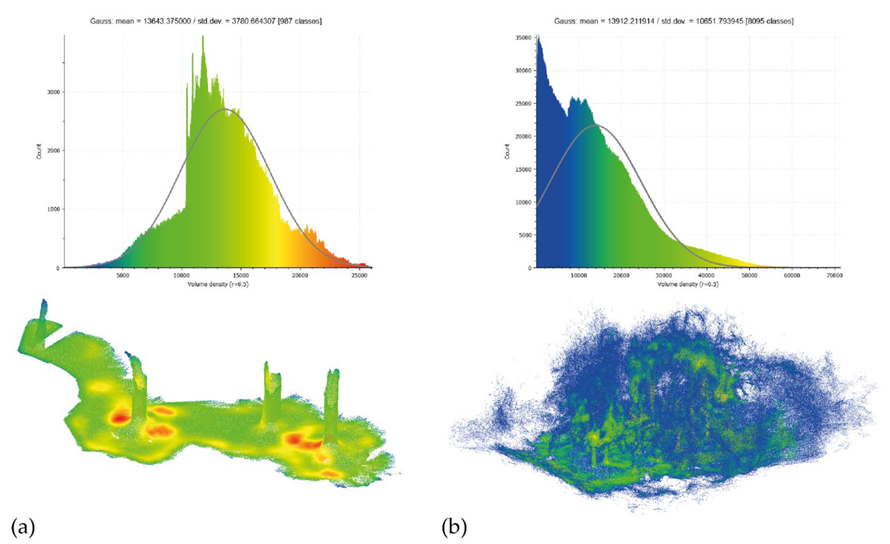
- As a preliminary ‘cleaning’, a prior attempt to remove the sky’s points was made by converting the three RGB channels of the point cloud into a single channel ((R+G+B)/3) (https://www.cloudcompare.org/doc/wiki/index.php/Colors%5CConvert_to_Scalar_Field, accessed on 26 June 2023), so that each point in the cloud was associated with a scalar color between 1 (black) and 255 (white). Filtering by scalar value, we selected a specific range of points: since the sky tends to white, the upper limit of the color range was reduced, resulting in values between 1 and 131 for the winter point cloud, and between 1 and 180 for the summer cloud. In addition to this preliminary selection, we also carried out an RGB color filtering using the Colorimetric Segmenter plugin (https://www.cloudcompare.org/doc/wiki/index.php/Colorimetric_Segmenter_(plugin), accessed on 26 June 2023). By filtering the points for arbitrary RGB color ranges, through several iterations, we were able to select and eliminate points with sky-like RGB values.
- To further polish the point clouds, the SOR (Statistical Out Removal) filter was used to remove noise (i.e., the elimination of isolated points) based on the calculation of the average distance of a point from its neighbors (https://www.cloudcompare.org/doc/wiki/index.php/SOR_filter, accessed on 26 June 2023) [39].
- Finally, to facilitate the acquisition of forest parameters, we manually removed all the context surrounding the study plot (Figure 5).
- 4.
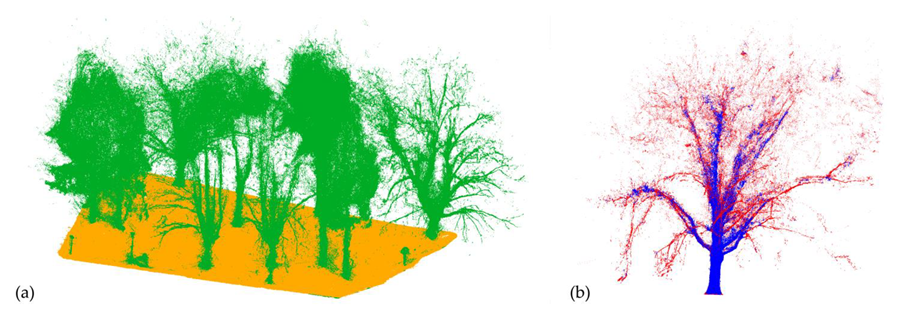
- The automatic CSF (Cloth Simulation Filter) filtering algorithm was then applied to separate the above-ground vegetation from the ground points (https://www.cloudcompare.org/doc/wiki/index.php/CSF_(plugin), accessed on 26 June 2023) [39,41] (Figure 6a).
- 5.
- Finally, as an example of a procedure that can be repeated for each tree in the plot, one Pinus (tree G) and one Platanus (tree A) were manually isolated from the other trees, lightly cleaned through manual segmentation, and then segmented using the CANUPO plugin (https://www.cloudcompare.org/doc/wiki/index.php/CANUPO_(plugin), accessed on 26 June 2023) in two classes: the first one including trunk and main branches, and the second one with secondary branches and leaves [39] (Figure 6b).
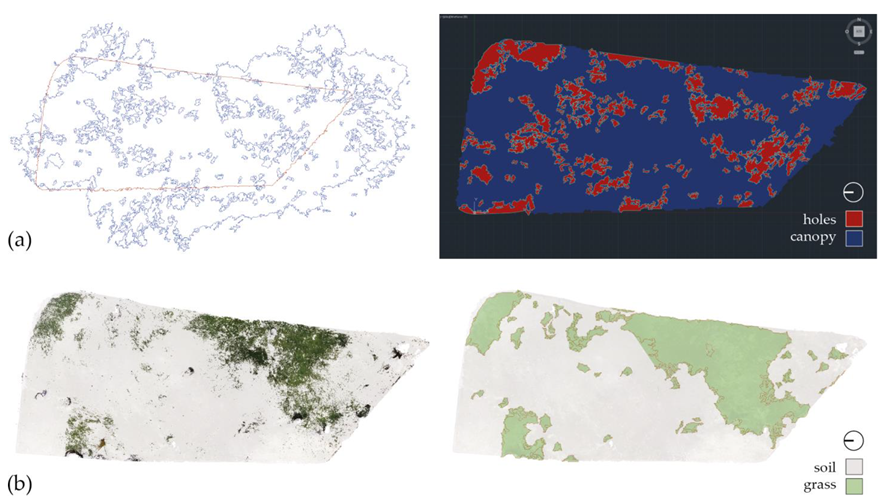
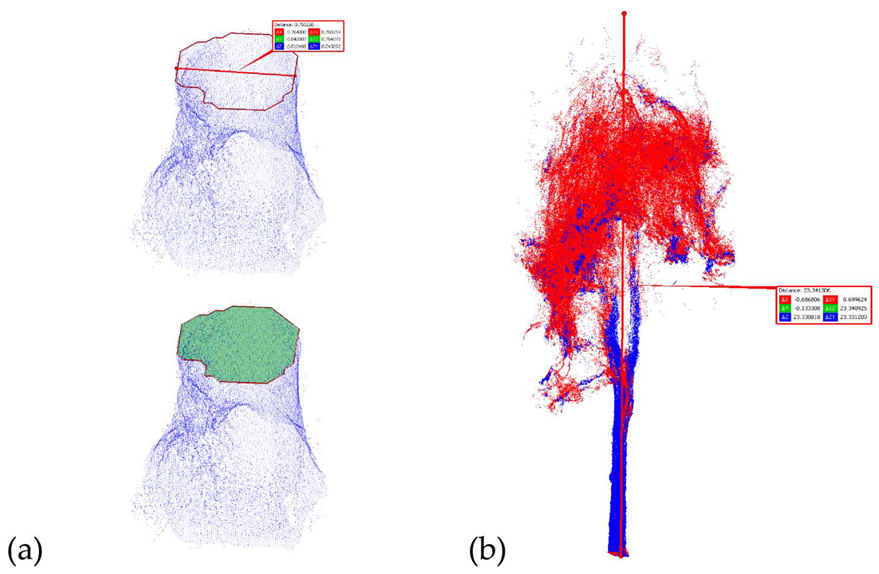
- Percentage of canopy cover: It was possible to derive information about the canopy, both from winter and summer clouds, using the cross-section tool in CC and extracting the contours of the canopy and soil as polylines [42,43]. The polylines were then exported as DXF files and imported into Autodesk AutoCAD (https://www.autodesk.it/products/autocad/overview?term=1-YEAR&tab = subscription, accessed on 26 June 2023) for the calculation of the areas covered and uncovered by the canopy (Figure 7a).
- Percentage of grass cover: For the summer cloud, with the Colorimetric Segmenter plugin and using the RGB filter, we separated grass from soil in CC; then, again, using the cross-section tool, the contours of grass areas were extracted as polylines. Selecting the vertices of all polylines, they can be transformed into 2D polygons for which we computed the total surface (as sum of surfaces) (Figure 7b).
- DBH: Using the cross-section tool [32], a slice of the trunk with a thickness of 0.05 m was extracted at 1.30 m above ground; then, the contour was extracted as a polyline and a 2D polygon was created from that [39]. Afterward, two methods were proposed to simulate manual measurements of the DBH (Figure 8a):
- Manual method: Measuring the diameter with the point picking command.
4. Results
5. Discussion and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pauleit, S.; Andersson, E.; Anton, B.; Buijs, A.; Haase, D.; Hansen, R.; Kowarik, I.; Stahl Olafsson, A.; Van der Jagt, S. Urban Green Infrastructure—Connecting People and Nature for Sustainable Cities. Urban For. Urban Green. 2019, 40, 1–3. [Google Scholar] [CrossRef]
- Read-Across to MA and TEEB. Available online: https://cices.eu/resources/the-equivalences-between-cices-and-the-classifications-used-by-the-ma-and-teeb/ (accessed on 18 July 2023).
- Fricker, P.; Kotnik, T. Computing Land-Scapes. In Patterns of Interaction: Computational Design Across Scales; Springer Nature: Singapore, 2023; pp. 49–67. [Google Scholar] [CrossRef]
- Nitoslawski, S.A.; Galle, N.J.; van den Bosc, C.K.; Steenberg, J.W.N. Smarter Ecosystems for Smarter Cities? A Review of Trends, Technologies, and Turning Points for Smart Urban Forestry. Sustain. Cities Soc. 2019, 51, 101770. [Google Scholar] [CrossRef]
- Cureton, P. Strategies for Landscape Representation: Digital and Analogue Techniques; Taylor & Francis: New York, NY, USA, 2016; pp. 1–248. [Google Scholar]
- Corona, P. Integration of Forest Mapping and Inventory to Support Forest Management. IForest 2010, 3, 59. [Google Scholar] [CrossRef]
- Köhl, M.; Magnussen, S.; Marchetti, M. Sampling Methods, Remote Sensing and GIS Multiresource Forest Inventory; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar] [CrossRef]
- Bobrowski, R.; Cuchi, T.; de Aguiar, J.T.; Crovador Junior, S.A.; Vendruscolo, E.; Pesck, V.A.; Stepka, T.F. Methods for the Estimation of Sampling Sufficiency in Urban Forest Inventories: The Case of Non-Patterned Compositions of Trees on Sidewalks. Urban For. Urban Green. 2022, 70, 127523. [Google Scholar] [CrossRef]
- Fankhauser, K.E.; Strigul, N.S.; Gatziolis, D. Augmentation of Traditional Forest Inventory and Airborne Laser Scanning with Unmanned Aerial Systems and Photogrammetry for Forest Monitoring. Remote Sens. 2018, 10, 1562. [Google Scholar] [CrossRef]
- Pregitzer, C.C.; Ashton, M.S.; Charlop-Powers, S.; D’Amato, A.W.; Frey, B.R.; Gunther, B.; Hallett, R.A.; Pregitzer, K.S.; Woodall, C.W.; Bradford, M.A. Defining and Assessing Urban Forests to Inform Management and Policy. Environ. Res. Lett. 2019, 14, 085002. [Google Scholar] [CrossRef]
- Lefland, A.B.; Huff, E.S.; Donahue, B. A Community Forestry Model Linking Research, Management, Education, and Stakeholder Engagement: Case Study Results from the Town of Weston, Massachusetts, USA. Small-Scale For. 2018, 17, 191–210. [Google Scholar] [CrossRef]
- Avery, T.E.; Burkhart, H.E. Forest Measurements: Fifth Edition. Google Libri. Available online: https://books.google.it/books/about/Forest_Measurements.html?id=IWx1CQAAQBAJ&redir_esc=y (accessed on 18 July 2023).
- Del Perugia, B.; Giannetti, F.; Chirici, G.; Travaglini, D. Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning. Forests 2019, 10, 277. [Google Scholar] [CrossRef]
- Ferrara, C.; Puletti, N.; Guasti, M.; Scotti, R. Mapping Understory Vegetation Density in Mediterranean Forests: Insights from Airborne and Terrestrial Laser Scanning Integration. Sensors 2023, 23, 511. [Google Scholar] [CrossRef]
- Jin, J.; Yang, J. Effects of Sampling Approaches on Quantifying Urban Forest Structure. Landsc. Urban Plan. 2020, 195, 103722. [Google Scholar] [CrossRef]
- Procedure di Rilievo Nelle Aree di Saggio e Valutazione Della Condizione Delle Chiome Manuale di Campagna Giugno. 2011. Available online: https://www.researchgate.net/publication/273574633_PROCEDURE_DI_RILIEVO_NELLE_AREE_DI_SAGGIO_E_VALUTAZIONE_DELLA_CONDIZIONE_DELLE_CHIOME_MANUALE_DI_CAMPAGNA_GIUGNO_2011?channel=doi&linkId=5505cd020cf24cee3a0506dd&showFulltext=true (accessed on 18 July 2023).
- Noss, R.F. Assessing and Monitoring Forest Biodiversity: A Suggested Framework and Indicators. For. Ecol. Manag. 1999, 115, 135–146. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest Inventory with Terrestrial LiDAR: A Comparison of Static and Hand-Held Mobile Laser Scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Holm, S.; Riihimäki, H.; Krucher, A.; Griess, H.; Griess, V.C.; Schweier, J. Virtual Forests: A Review on Emerging Questions in the Use and Application of 3D Data in Forestry. Int. J. For. Eng. 2023. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial Laser Scanning in Forest Ecology: Expanding the Horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Fol, C.R.; Kükenbrink, D.; Rehush, N.; Murtiyoso, A.; Griess, V.C. Evaluating State-of-the-Art 3D Scanning Methods for Stem-Level Biodiversity Inventories in Forests. Int. J. Appl. Earth Obs. Geoinf. 2023, 122, 103396. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Balenovic, I.; Saarinen, N.; Junttila, S.; Kankare, V.; Holopainen, M.; Mokros, M.; Surovy, P.; Kaartinen, H.; et al. Close-Range Remote Sensing of Forests: The State of the Art, Challenges, and Opportunities for Systems and Data Acquisitions. IEEE Geosci. Remote Sens. Mag. 2022, 10, 32–71. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Vega, C.; Hamrouni, A.; El Mokhtari, A.; Morel, M.; Bock, J.; Renaud, J.P.; Bouvier, M.; Durrieue, S. PTrees: A Point-Based Approach to Forest Tree Extraction from Lidar Data. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 98–108. [Google Scholar] [CrossRef]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree—An Efficient Open Source Tool to Build Tree Models from TLS Clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Parkan, M.; Tuia, D. Individual Tree Segmentation in Deciduous Forests Using Geodesic Voting. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 637–640. [Google Scholar] [CrossRef]
- Burt, A.; Disney, M.; Calders, K. Extracting Individual Trees from Lidar Point Clouds Using Treeseg. Methods Ecol. Evol. 2019, 10, 438–445. [Google Scholar] [CrossRef]
- Mazzacca, G.; Grilli, E.; Cirigliano, G.P.; Remondino, F.; Campana, S. Seeing among foliage with lidar and machine learning: Towards a transferable archaeological pipeline. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 46, 365–372. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surový, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel Low-Cost Mobile Mapping Systems for Forest Inventories as Terrestrial Laser Scanning Alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Forest Inventory with Apple IPad Pro and Integrated LiDAR Technology. In Proceedings of the SilviLaser Conference, Vienna, Austria, 28–30 September 2021; pp. 87–89. [Google Scholar] [CrossRef]
- Wang, X.; Singh, A.; Pervysheva, Y.; Lamatungga, K.E.; Murtinová, V.; Mukarram, M.; Zhu, Q.; Song, K.; Surový, P.; Mokroš, M. Evaluation Of Ipad Pro 2020 Lidar For Estimating Tree Diameters In Urban Forest. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 8, 105–110. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Hristova, H.; Rehush, N.; Griess, V.C. Low-cost mapping of forest under-storey vegetation using spherical photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 48, 185–190. [Google Scholar] [CrossRef]
- Urech, P.R.W.; von Richthofen, A.; Girot, C. Grounding Landscape Design in High-Resolution Laser-Scanned Topography. J. Landsc. Archit. 2022, 17, 58–69. [Google Scholar] [CrossRef]
- Hejtmánek, L.; Hůla, M.; Herrová, A.; Surový, P. Forest Digital Twin as a Relaxation Environment: A Pilot Study. Front. Virtual Real 2022, 3, 1033708. [Google Scholar] [CrossRef]
- Buonocore, L.; Yates, J.; Valentini, R. A Proposal for a Forest Digital Twin Framework and Its Perspectives. Forests 2022, 13, 498. [Google Scholar] [CrossRef]
- Chioni, C. Multiscale Digital Landscape Reconstructions for Resilient Mountain Inner Areas. In Proceedings of the International Conference on Computational Science and Its Applications, Athens, Greece, 3–6 July 2023; Springer: Berlin/Heidelberg, Germany, 2023; pp. 17–26. [Google Scholar] [CrossRef]
- Nummi, P.; Prilenska, V.; Grisakov, K.; Fabritius, H.; Ilves, L.; Kangassalo, P.; Staffans, A.; Tan, X. Narrowing the Implementation Gap: User-Centered Design of New E-Planning Tools. Int. J. E-Plan. Res. 2022, 11, 1–22. [Google Scholar] [CrossRef]
- Kükenbrink, D.; Marty, M.; Bösch, R.; Ginzler, C. Benchmarking Laser Scanning and Terrestrial Photogrammetry to Extract Forest Inventory Parameters in a Complex Temperate Forest. Int. J. Appl. Earth Obs. Geoinf. 2022, 113, 102999. [Google Scholar] [CrossRef]
- Balestra, M.; Tonelli, E.; Vitali, A.; Urbinati, C.; Frontoni, E.; Pierdicca, R. Geomatic Data Fusion for 3D Tree Modeling: The Case Study of Monumental Chestnut Trees. Remote Sens. 2023, 15, 2197. [Google Scholar] [CrossRef]
- Bobrowski, R.; Winczek, M.; Zięba-Kulawik, K.; Wężyk, P. Best Practices to Use the IPad Pro LiDAR for Some Procedures of Data Acquisition in the Urban Forest. Urban For. Urban Green. 2023, 79, 127815. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Ghanbari Parmehr, E.; Amati, M. Individual Tree Canopy Parameters Estimation Using Uav-Based Photogrammetric and Lidar Point Clouds in an Urban Park. Remote Sens. 2021, 13, 2062. [Google Scholar] [CrossRef]
- Young, T.J.; Jubery, T.Z.; Carley, C.N.; Carroll, M.; Sarkar, S.; Singh, A.K.; Singh, A.; Ganapathysubramanian, B. “Canopy Fingerprints” for Characterizing Three-Dimensional Point Cloud Data of Soybean Canopies. Front. Plant Sci. 2023, 14, 1141153. [Google Scholar] [CrossRef]
- Rendering Large Point Clouds in Unity|TU Wien—Research Unit of Computer Graphics. Available online: https://www.cg.tuwien.ac.at/research/publications/2017/FRAISS-2017-PCU/ (accessed on 8 September 2023).
- Schutz, M.; Krosl, K.; Wimmer, M. Real-Time Continuous Level of Detail Rendering of Point Clouds. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 103–110. [Google Scholar]
- Fol, C.R.; Murtiyoso, A.; Griess, V.C. Feasibility study of using virtual reality for interactive and immersive semantic segmentation of single tree stems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 48, 95–99. [Google Scholar] [CrossRef]
- Wissen Hayek, U.; Gutscher, F.; Braune, P.; Dantas, N.; Roost, D.; Schürch, J.; Antonetti, M.; Grêt-Regamey, A.; Döring, M. Sensing River and Floodplain Biodiversity—Developing a Prototype. J. Digit. Landsc. Archit. 2023, 8, 523–532. [Google Scholar] [CrossRef]
- Luoma, L.; Fricker, P.; Schlecht, S. Design with Sound: The Relevance of Sound in VR as an Immersive Design Tool for Landscape Architecture. J. Digit. Landsc. Archit. 2023, 2023, 494–501. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree | Species | DBH (m) | Height (m) |
|---|---|---|---|
| A | Platanus × acerifolia | 0.77 | 21.7 |
| B | Pinus sylvestris | 0.63 | 23.8 |
| C | Pinus sylvestris | 0.46 | 23.8 |
| D | Platanus × acerifolia | 0.48 | 24.3 |
| E | Pinus sylvestris | 0.33 | 22.5 |
| F | Pinus sylvestris | 0.46 | 22.0 |
| G | Pinus sylvestris | 0.56 | 23.2 |
| H | Platanus × acerifolia | 0.51 | 27.2 |
| I | Pinus sylvestris | 0.58 | 26.8 |
| L | Pinus sylvestris | 0.53 | 23.3 |
| M | Platanus × acerifolia | 0.95 1 | 25.8 |
| Apple iPad Pro | Ricoh Theta V | |
|---|---|---|
| Cost | €€ | €€€ |
| Acquisition time | ⚫⚫ | ⚫ |
| Processing time | ⚫⚫ | ⚫⚫⚫⚫ |
| Used software |
|
|
| Volume density (mean value) of the resulting point cloud | 13,600 points/r = 0.50 m | 13,900 points/r = 0.50 m |
| ‘Automatic’ georeferencing of the resulting point cloud | Yes | No |
| Ground Area (m2) | Season | Grass Area (m2) | Grass Cover | Canopy Area (m2) | Canopy Cover |
|---|---|---|---|---|---|
| 584.43 | Winter | - | - | 385.95 | 0.66 |
| Summer | 181.40 | 0.31 | 433.93 | 0.74 |
| Tree|Species | Season | DBH (m) * | Height (m) |
|---|---|---|---|
| A|Platanus acerifolia | Winter | 0.75 | 20.28 |
| Summer | 0.76 | 20.20 | |
| G|Pinus sylvestris | Winter | 0.60 | 21.39 |
| Summer | 0.60 | 21.30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chioni, C.; Maragno, A.; Pianegonda, A.; Ciolli, M.; Favargiotti, S.; Massari, G.A. Low-Cost 3D Virtual and Dynamic Reconstruction Approach for Urban Forests: The Mesiano University Park. Sustainability 2023, 15, 14072. https://doi.org/10.3390/su151914072
Chioni C, Maragno A, Pianegonda A, Ciolli M, Favargiotti S, Massari GA. Low-Cost 3D Virtual and Dynamic Reconstruction Approach for Urban Forests: The Mesiano University Park. Sustainability. 2023; 15(19):14072. https://doi.org/10.3390/su151914072
Chicago/Turabian StyleChioni, Chiara, Anna Maragno, Angelica Pianegonda, Marco Ciolli, Sara Favargiotti, and Giovanna A. Massari. 2023. "Low-Cost 3D Virtual and Dynamic Reconstruction Approach for Urban Forests: The Mesiano University Park" Sustainability 15, no. 19: 14072. https://doi.org/10.3390/su151914072
APA StyleChioni, C., Maragno, A., Pianegonda, A., Ciolli, M., Favargiotti, S., & Massari, G. A. (2023). Low-Cost 3D Virtual and Dynamic Reconstruction Approach for Urban Forests: The Mesiano University Park. Sustainability, 15(19), 14072. https://doi.org/10.3390/su151914072